经典雷达资料-第15章 动目标显示(MTI)雷达-5
经典雷达资料-第16章 机载动目标显示(AMTI)雷达-1
第16章机载动目标显示(AMTI)雷达FRED M. STAUDAHER16.1 采用AMTI技术的系统机载搜索雷达最初是为远程侦察机探测舰艇研制的。
第二次世界大战后期,美海军研制了几种机载预警(AEW)雷达,用来探测从舰艇雷达天线威力区之下飞近特遣舰队的低空飞机。
在增大对空和对海面目标的最大检测距离方面,机载雷达的优点是显而易见的,只要了解下述情况就很清楚了,高度为100ft的天线桅杆,其雷达视线距离只有12n mile,而与其相比,飞机高度为10 000ft时,雷达视线距离则为123n mile。
神风突击队袭击造成多艘哨舰的损失引起了机载自主探测与控制站的设想,后来这种系统发展成为一种用于洲际防空的边界巡逻机。
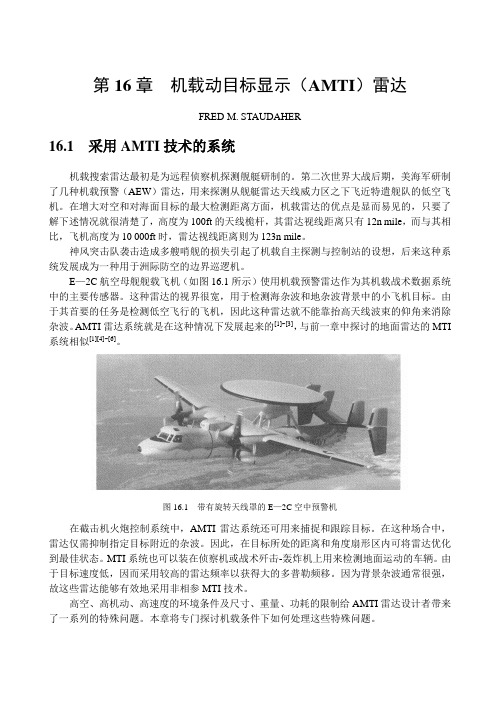
E—2C航空母舰舰载飞机(如图16.1所示)使用机载预警雷达作为其机载战术数据系统中的主要传感器。
这种雷达的视界很宽,用于检测海杂波和地杂波背景中的小飞机目标。
由于其首要的任务是检测低空飞行的飞机,因此这种雷达就不能靠抬高天线波束的仰角来消除杂波。
AMTI雷达系统就是在这种情况下发展起来的[1]~[3],与前一章中探讨的地面雷达的MTI 系统相似[1][4]~[6]。
图16.1 带有旋转天线罩的E—2C空中预警机在截击机火炮控制系统中,AMTI雷达系统还可用来捕捉和跟踪目标。
在这种场合中,雷达仅需抑制指定目标附近的杂波。
因此,在目标所处的距离和角度扇形区内可将雷达优化到最佳状态。
MTI系统也可以装在侦察机或战术歼击-轰炸机上用来检测地面运动的车辆。
由于目标速度低,因而采用较高的雷达频率以获得大的多普勒频移。
因为背景杂波通常很强,故这些雷达能够有效地采用非相参MTI技术。
高空、高机动、高速度的环境条件及尺寸、重量、功耗的限制给AMTI雷达设计者带来了一系列的特殊问题。
本章将专门探讨机载条件下如何处理这些特殊问题。
第16章机载动目标显示(AMTI)雷达·637·16.2 覆盖范围的考虑搜索雷达一般要求有360︒方位角覆盖。
MTI动目标显示雷达

样,取样后的波形和频谱均将发生变化。
动目标显示雷达的工作原理及主要组成
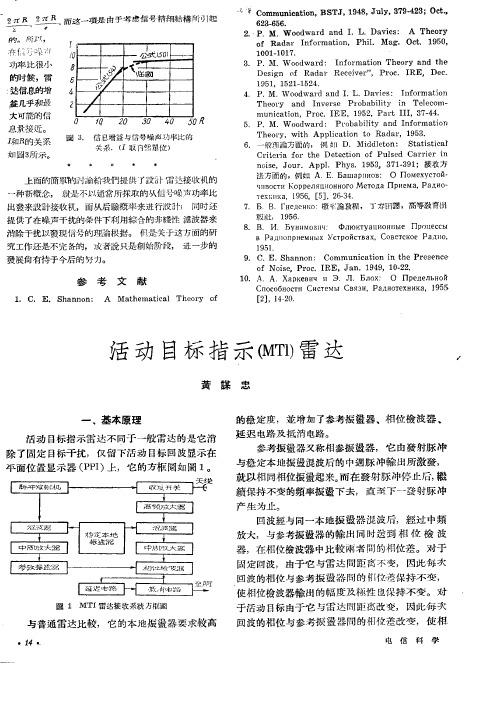
当用多普勒效应来鉴别运动目标回波和固定目标回波时, 与普通脉冲雷 达的差别是必须在相位检波器的输入端加上基准电压(或称相参电压) ,该 电压应和发射信号频率相参并保存发射信号的初相, 且在整个接收信号期间 连续存在。 工程上,基准电压的频率常选在中频(相位检波器的相位基准) 。各种 回波信号均与基准电压比较相位。从相位检波器输出的视频脉冲,有固定目 标的等幅脉冲串和运动目标的调幅脉冲串。通常在送到终端(显示器或数据 处理系统)去之前要将固定杂波消去,故要采用相消设备或杂波滤波器,滤 去杂波干扰而保存运动目标信息。 下面着重讨论相参电压的获取和固定杂波 消除这两个特殊问题。
脉冲工作状态时的多普勒效应 盲速和频闪
盲速:是指目标虽然有一定的径向速度������������ ,但若其回波信号经过相位检 波器后,输出为一串等幅脉冲,与固定目标的回波相同,此时的运动速度称 为盲速。 (������������ 等于脉冲重复频率������������ 的整数倍) 频闪: 频闪效应是指当脉冲工作状态时,相位检波器输出端回波脉冲信 号的包络调制频率������������ ,与目标运动的径向速度������������ 不再保持正比关系。此时如 用包络调制频率测速时将产生测速模糊。 (即������������ 超过重复频率������������ 的一半) 产生盲速和频闪效应的基本原因在于, 脉冲工作状态是对连续发射的取
2.消除固定目标回波
在相位检波器输出端, 固定目标的回波是一串振幅不变的脉冲,而运动 目标的回波是一串振幅调制的脉冲。将它们加到偏转调制显示器上,固定目 标的回波是振幅稳定的脉冲,而运动目标的回波呈现上下“跳动”的“蝴蝶 效应” 。 可以根据这种波形特点, 在偏转显示器上区分固定目标与运动目标。 如果要把回波信号加到亮度调制显示器或终端数据处理设备, 则必须先消除 固定目标回波。 最直观的一种办法是将相邻重复周期的信号相减,使固定目 标回波由于振幅不变而相互抵消; 运动目标回波相减后剩下相邻重复周期振 幅变化的部分输出。 A. 相消设备特性 相消设备等效于一个梳齿形滤波器,其频率特性在������ = ������������ ������ 各点均为零。 固定目标频谱的特点是,谱线位于������������������ 点上,因而在理想情况下,通过相消 器这样的梳齿滤波器后输出为零。 但当目标的多普勒频率为重复频率整数倍 时,其频谱结构也有相同的特点,故通过上述梳状滤波器后无输出。 B. 数字相消器 相消器需要迟延线将信号迟延一个脉冲重复周期并和未迟延的信号相 减。 现代大规模的集成电路的迅猛发展,可完全用数字技术来实现信号的存 储、延时和各种实时运算。 首先把从相位检波器输出的模拟信号变为数字信号。 以时钟脉冲控制取 样保持电路对输入相参视频信号取样, 被时间量化的取样保持信号送到模数 转换电路(A/D 变换器)进行幅度分层,转为数字信号输出。数字信号的延 迟可用存储器完成, 将数字信号按取样顺序写入存储器内,当下一个重复周 期的数字信号到来时, 由存储器中都会出同一距离单元的信号进行相减运算, 在输出端得到跨周期相消的数字信号。 一般取样间隔应小于脉冲宽度的一半, 即在一个脉冲宽度以内取样两次 以上。A/D 变换器的量化位数 N 应选到 N≥7 后,量化损失低于 0.08dB,可 以忽略其影响。N 的选择还对系统改善因子有影响。
几种典型动目标指示雷达系统的参数特性介绍(一)
几种典型动目标指示雷达系统的参数特性介绍(一)作者:覃金海来源:《大东方》2018年第04期摘要:本文基于文献检索,主要对目前的典型MTI系统进行了介绍,分别对AN/PPS系列地面监视雷达、F-SAR系统、JSTARS系统、TanDEM-X的ATI功能进行了研究与总结,介绍了它们的主要原理以及参数特性。
一、AN/PPS系列地面监视雷达是AN/PPS-5是AN/PPS系列地面监视雷达于1950年代推出的第一个型号,它是一种地对地的轻型便携式多普勒脉冲雷达,在越南战争中表现突出,列装于步兵和坦克部队,可以对6km距离的人员或者10km距离的车辆目标进行全天候的探测和运动目标检测。
AN/PPS-5具有视觉成像以及有声成像功能,“计划位置指示器(PPI)”可以进行视觉成像;“有声指示器”则是能够将目标的速度记录下来,然后把速度的数值进行声音应答。
AN/PPS-5还具有两种工作模式,分别是手动扫描模式和自动扇形区域扫描。
并且由于其用于搭载地基平台,雷达系统的密封性能非常好,并且设计十分坚固,能够很好的适应恶劣的地形条件,还可以在集装箱的保护下浸入水中甚至是进行伞降。
该雷达可以安装在悍马车和吉普车等车载平台上使用,也能作为单兵装备直接是携带使用。
在AN/PPS系列中除了AN/PPS-5雷达,较为有名的还有AN/PPS-4、AN/PPS-6以及AN/PPS-15地面监视雷达。
AN/PPS-4的体积较小,高只有约1.2m,AN/PPS-4和AN/PPS-6的探测范围都比AN/PPS-5小,但其他功能比较接近。
AN/PPS-15则是目前已经公布的AN/PPS系列的最后一款地面监视雷达,该雷达制作了A、B两型,自1974年生产、1976年服役后沿用至今,其能够对战场上的车辆、船只以及人员等移动目标进行近距离的探测和定位。
AN/PPS—15可以全天候运转,并且能够适应多种气象和地形条件,能够为步兵侦察任务提供很好的装备、技术保障。
经典雷达资料-第15章 动目标显示(MTI)雷达-1

第15章动目标显示(MTI)雷达Willian W.ShraderV.Gregers-Hansen15.1 引言MTI雷达的用途是抑制来自建筑物、山、树、海和雨之类的固定或慢动的无用目标信号,并且能检测或显示飞机之类的运动目标信号。
图15.1是两张平面位置显示器(PPI)的照片,表明了一部正常工作的MTI雷达的效果。
从中心亮点到平面位置显示器的最边缘为40n mile,距离刻度环间距为10 n mile。
其中,左图是正常的视频显示,显示了固定的目标回波;右图是MTI雷达抑制杂波的照片,在天线扫描3次的时间内,照相机快门始终是打开的,因此飞机目标呈现连续的3个回波。
图15.1 MTI系统的效果这两张照片显示了MTI系统的效果。
在天线连续转3圈时,由于照相机的快门一直是打开的,所以在右面的照片上,飞机看起来就是相邻的3个亮点。
PPI的量程是40 n mile。
MTI雷达利用动目标回波的多普勒频移来区分动目标和固定目标。
在脉冲雷达系统中,这一多普勒频移表现为相继返回的雷达脉冲间回波信号的相位变化。
假设雷达所辐射的射频脉冲能量被一幢楼房和飞向雷达站的一架飞机所反射。
反射回波需经一定的时间方能返回雷达。
雷达又发射第二个射频脉冲,楼房反射的回波信号仍将经历完全相同的时间后返回。
但雷达手册²576²是从飞机反射回的信号所经历的时间却稍微少一些,这是因为在两个发射脉冲之间,飞机已向雷达的方向靠近了一段距离。
回波信号返回雷达所需的准确时间并不重要,但脉冲间时间是否变化却很重要。
时间的变化(对飞机目标而言,数量级为几个毫微秒)可以用回波信号的相位与雷达基准振荡器相位之间加以比较来确定。
如目标在脉冲间发生移动,则回波脉冲的相位就会发生变化。
图15.2是一种相参MTI雷达的简化框图。
射频振荡器向发射脉冲的脉冲放大器馈送能量。
同时,射频振荡器还用做确定回波信号相位的相位基准。
在发射脉冲的间隔时间内,相位信息储存在脉冲重复间隔(PRI)存储器中,并且还与前一个发射脉冲的相位信息相减。
雷达原理与系统知识要点总结(必修)

成绩构成:平时20%(原理10%+系统10%,含考勤和课堂测试),期中30%,期末40%,课程设计10%。
雷达原理与系统(必修)知识要点整理第一章:1、雷达基本工作原理框图认知。
2、雷达面临的四大威胁3、距离和延时对应关系4、速度与多普勒关系(径向速度与线速度)5、距离分辨力,角分辨力6、基本雷达方程(物理过程,各参数意义,相互关系,基本推导)7、雷达的基本组成(几个主要部分),及各部分作用第二章雷达发射机1、单级振荡与主振放大式发射机区别2、基本任务和组成框图3、峰值功率、平均功率,工作比(占空比),脉宽、PRI(Tr),PRF(fr)的关系。
第三章接收机1、超外差技术和超外差接收机基本结构(关键在混频)2、灵敏度的定义,识别系数定义3、接收机动态范围的定义4、额定噪声功率N=KTB N、噪声系数计算及其物理意义5、级联电路的噪声系数计算6、习题7、AGC,AFC,STC的含意和作用第四章显示器1、雷达显示器类型及其坐标含义;2、A型、B型、P型、J型第五章作用距离1、雷达作用距离方程,多种形式,各参数意义,PX=?Rmax=?(灵敏度表示的、检测因子表示的等)2、增益G和雷达截面A的关系2、雷达目标截面积定义3、习题4、最小可检测信噪比、检测因子表示的距离方程5、奈曼皮尔逊准则的定义6、虚警概率、检测概率、信噪比三者关系,习题.(会看图查数)由概率分布函数、门限积分区间表示的各种概率形式;6.5 CFAR●什么是CFAR●慢变化CFAR的框图和原理●快变化CFAR的框图和原理,(左右平均、左右平均选大)●CFAR的边缘效应,图及分析7、为什么要积累,相参积累与非相参积累对信噪比改善如何,相参M~M倍。
8、积累对作用距离的改善,(方程、结论、习题)9、大气折射原因、直视距离计算(注意单位Km还是m)10、二次雷达方程、习题。
11、分贝表示的雷达方程,计算、习题,普通雷达方程的计算。
第六章距离测量1、R,tr,距离分辨力、脉宽、带宽关系2、最短作用距离、最大不模糊距离与脉宽、重频关系3、双重频判距离模糊、习题。
MTI雷达知识

MTI雷达知识MTI 雷达的目的是抑制来自建筑、山、树、海和雨等固定或慢动的无用目标信号,并保留对如飞机等运动目标信号的检测或显示。
MTI 雷达利用动目标带给回波的多普勒频移来区分动目标和固定目标。
在脉冲雷达系统中,这种多普勒频移表现为相继返回的雷达脉冲间回波信号的相位变化。
假设雷达所辐射的射频脉冲能量被一幢楼房(固定目标)和飞向雷达的一架飞机(动目标)所反射。
反射回波脉冲需经一定的时间方能返回雷达。
雷达再次发射第二个射频脉冲,楼房反射的回波信号仍将经历完全相同的时间后返回。
但是从运动的飞机反射回的信号返回所经历的时间却稍微少一些,因为在两个发射脉冲之间,飞机已向雷达的方向靠近了一段距离。
时间的变化(对飞机目标而言,数量级为几毫微秒)可以用回波信号的相位与雷达基准振荡器相位之间的比较来确定。
如果目标在脉冲间发生移动,则回波脉冲的相位就会发生变化。
如下图所示。
图源自网络下图是一种相干MTI 雷达的简化框图。
射频振荡器向发射脉冲的脉冲放大器馈送信号。
同时,射频振荡器还用作确定回波信号相位的相位基准。
在发射脉冲的间隔时间内,相位信息存储在脉冲重复间隔(PRI)存储器中,并且和当前一个接收脉冲的相位信息相减。
只有当回波信号为动目标回波时,减法器才有输出。
下图是一幅完整的 MTI 雷达方框图。
当该雷达工作在 L 或 S 波段,典型脉冲间隔为1~3ms,采用真空管放大器,如速调管时脉宽为几微秒;当使用固态发射机时,为进行脉冲压缩,脉宽为几十微秒。
接收信号由低噪声放大器(LNA)放大,然后通过与稳定本振混频经一个或多个中频(IF)下变频。
接收机输出端接中频带通限幅器保护后面的 A/D 转换器,并防止 A/D饱和。
在早期 MTI 系统中,中频限幅器起到限制动态范围以降低MTI输出杂波残留的目的。
接收信号然后通过A/D 转换器转换成同相和正交分量(I 和 Q),方法是使用一对相位检测器或直接采样。
同相分量(I)和正交分量(Q)输出是中频信号幅度和相位的函数,过去称为双极性视频,但更确切的说法是接收信号的复包络。
活动目标指示(MTI)雷达
a
a
i
e
s :
I
n
n
f
,
nr
l
e
一
a
t i
e o
o
n
-
d
,
I P
r o a
n v e r s e
b bil i t y
,
i
t
T
I
n
e
m
.
}
m
5
.
u n
i
t i
o
n
o
I E
:
e
E P
a
,
1 95 2
P
a a
a
r
1 1 1 d f
a r
,
3 7 44
o
r
良量 接 近
3
。
P
T h
.
M
e
W
o
r
o
dw
r
d
r o
八e
出 翌 来段针接收 机
而 从后 脸概率 来 进 行 敲针 ; 同 时 还 提 供 了 在 噪声干扰的 条 件下 利 用 粽 合 的 非 枝 性 滤波 器 来
几 可 消除 干 扰以 翌 现信号 的 理渝权据 是 关 于 这方 面的 研 究 工作 还 是 不 完 备 的 或 者羡 只 是 iflJ 始 阶段 进 一 步 的
。
[5 ]
:
2 6 3 4
7
.
.
B
.
B
,
.
r
日e
IH 泊
o 3
概 军 输教 程
,
丁 寿田蒸
,
高 等 教 育出
(参考资料)雷达系统课后习题和答案
雷达原理习题集第一章1-1.已知脉冲雷达中心频率=3000MHz,回波信号相对发射信号的延迟时间为 1000μs,回波信号的频率为 3000.01MHz,目标运动方向与目标所在方向的夹角 60°,求目标距离、径向速度与线速度。
1-2.已知某雷达对σ=的大型歼击机最大探测距离为 100Km,a)如果该机采用隐身技术,使σ减小到,此时的最大探测距离为多少?b)在 a)条件下,如果雷达仍然要保持 100Km最大探测距离,并将发射功率提高到 10倍,则接收机灵敏度还将提高到多少?1-3. 画出 p5图 1.5中同步器、调制器、发射机高放、接收机高放和混频、中放输出信号的基本波形和时间关系。
第二章2-1. 某雷达发射机峰值功率为 800KW,矩形脉冲宽度为 3μs,脉冲重复频率为 1000Hz,求该发射机的平均功率和工作比2-2. 在什么情况下选用主振放大式发射机?在什么情况下选用单级振荡式发射机?2-3. 用带宽为 10Hz的测试设备测得某发射机在距主频 1KHz处的分布型寄生输出功率为10μW,信号功率为 100mW,求该发射机在距主频 1KHz处的频谱纯度。
2-4. 阐述 p44图 2.18中和 p47图 2.23中、的作用,在 p45图 2.21中若去掉后还能否正常工作?2-5. 某刚性开关调制器如图,试画出储能元件 C的充放电电路和①~⑤点的时间波形2-6. 某人工长线如图,开关接通前已充电压10V,试画出该人工长线放电时(开关接通)在负载上产生的近似波形,求出其脉冲宽度L=25μh,C=100pF,=500Ω2.7. 某软性开关调制器如图,已知重复频率为2000Hz,C=1000pF,脉冲变压器匝数比为1:2,磁控管等效电阻=670Ω,试画出充放电等效电路和①~⑤点的时间波形。
若重复频率改为1000Hz,电路可做哪些修改?2.8.某放大链末级速调管采用调制阳极脉冲调制器,已知=120KV,Eg=70V,=100pF,充放电电流I=80A,试画出a,b,c三点的电压波形及电容的充电电流波形与时间关系图。
雷达原理介绍

(t)= K t2 f (t)= (t)/2= K t
(t)
f (t)
B 2
Tp
0
TpLeabharlann tTp22
2
0
B 2
Tp t 2
由于它的频率是随时间线性变化的,所以称之为线性调频
信号, 称K为调频斜率。显然,LFM信号频率变化范围, 即频谱宽度B等于:
将会远远优于脉宽Tp 。
角度分辨率
雷达的角度分辨率表征
了雷达将目标从角度上分开
的能力。雷达的发射波束越
2
窄,其角度分辨率越高而天
1
线孔径越大,波束越窄,角
分辨率就越高。但是,限于
r
天线的制造、加工和安装水
平,真实天线的孔径存在着
2 1
无法逾越的上限。
雷达波束张角 与发射波长、天
r
线孔径D之间存在近似关系:
D = Tp / Tr = Pt / Pav ≤ 1 当雷达发射信号是连续波时,其工作比D = 1。
基本原理
目标回波
接收信号:
噪声
t
雷达接收机输出波形由两部分组成:一是各种目标被
发射电磁波照射后的反射回波(图中假设只有一个目标),
称之为信号;另一是接收机噪声,无论有没有目标回波,
它总是存在并影响对信号的分析。记信号峰值功率为Ps, 噪声平均功率为Pn,定义雷达接收信噪比SNR:
探测的最小目标缩小了63倍,或者雷达的作用距离R增加 了(TpB)1/8 2.8倍。
LFM信号接收流程
LFM信号的接收流程框图与各信号表达式如下所示:
s(t)
sm(t) 匹配滤波器 sMF(t)
雷达术语中英文对照
雷达术语中英文对照1. A型显示器(距离显示器) A scope(range indicator)2. 交流二极管充电A.C. diode charging3. 交流阻抗A.C. impedance4. 交流谐振充电A.C. resonant charging5. A/R型显示器A/R scope6. 电枢控制Aarmature control7. 绝对误差Absolute error8. 吸收性复盖层Absorbent overlay(coverage)9. 减震器Absorber10. 吸收式衰减器Absorptive attenuator11. 交流控制系统AC control system12. 加速度信息Acceleration inFORMation13. 附件Accessory14. 捕捉目标试验Acquisition object test15. 截获概率试验Acquisition probability test16. 低仰角截获试验Acquisition test at the lowest elevation17. 有源滤波器Active filter18. 有源校正网络Active corrective network19. 有源干扰Active jamming20. 阵列单元的有效阻抗Active-impedance of an array element21. 执行元件Actuator(driving) element22. 自适应天线Adaptive antenna23. 自适应天线系统Adaptive antenna system24. 自适应能力Adaptive capability25. 自适应检测器Adaptive detector26. 自适应跳频Adaptive frequency hopping27. 自适应干扰机Adaptive jammer28. 自适应动目标显示Adaptive MTI29. 加法器Adder30. 导纳Admittance31. 气悬体干扰Aerosol jamming32. 通风车Air blower carriage33. 空气滤渍器Air filter34. 空中交通管制雷达Air traffic control radar35. 机载引导雷达Airborne director radar36. 机载动目标显示Airborne MTI37. 机载雷达Airborne radar38. 机载测距雷达Airborne range-finding radar39. 机载警戒雷达Airborne warning radar40. 机载截击雷达Airborne-intercept radar41. 空心偏转线圈Air-core deflection coil42. 护尾雷达Aircraft tail warning radar(A TWR)43. 飞机跟踪试验Aircraft tracking test44. 全空域录取All-zone extraction45. 换批Alternate the batch number46. 调幅干扰AM jamming47. 调幅调相转换AM/PM conversion48. 模糊函数Ambiguity function49. 模糊图Ambiguity pattern50. 衰减量Amount of attenuation51. 放大器Amplifier52. 放大元件Amplifier element53. 增幅管Amplitron54. 幅度鉴别恒虚警技术Amplitude discrimination CFAR technique55. 幅裕度Amplitude margin56. 幅度噪声Amplitude noise57. 幅度方向图Amplitude pattern58. 振幅量化Amplitude quantization59. 分层Amplitude quantizing60. 比幅单脉冲雷达Amplitude-comparison monopulse radar61. 幅频特性Amplitude-frequency characteristic62. 幅频一致性Amplitude-frequency equalization63. 调幅信号Amplitude-modulated signal64. 幅值-相位仪Amplitude-phase meter65. 模拟移相器Analog phase shifter66. 信号的模拟处理Analog processing of signal67. 模拟信号Analog signal68. 模拟式扫描(连续式扫描) Analog sweep69. 模-数变换Analog-to-digital conversion70. 模拟显示Analogue display71. 模拟测距Analogue ranging72. 频率分析法Analysis method of frequency domain73. 解析信号Analytic signal74. 角度欺骗干扰Angle deception jamming75. 角度截获概率Angle intercept probability76. 角度噪声Angle noise77. 跟踪角速度和角加速度Angle tracking velocity and acceleration78. 角闪烁误差Angular glint error79. 角增量正余弦函数运算器Angular increment sine-cosine arithmeticunit80. 天线Antenna81. 天线抗干扰技术Antenna anti-jamming technique82. 天线回零装置Antenna back device83. 天线控制系统Antenna control system84. 孔径型天线的天线效率Antenna efficiency of an aperture-type antenna85. 天线电轴Antenna electrical boresight86. 天线升降机构Antenna elevating subsiding machine87. 天线增益Antenna gain88. 天线裹冰厚度Antenna icing depth89. 天线锁定装置Antenna locking device90. 天线方向图Antenna pattern91. 天线波瓣自动记录仪Antenna pattern automatic recorder92. 天线座Antenna pedestal93. 天线指向Antenna pointing94. 天线功率增益Antenna power gain95. 天线读数机构Antenna reading device96. 天线风洞试验Antenna test in tunnel97. 天线测试转台Antenna test turning platFORM98. 天线拖车Antenna trailer99. 抗有源干扰能力Anti-active jamming capability100. 抗轰炸能力Anti-bomb capability101. 抗海浪试验Anti-clutter test against the sea102. 防撞信息Anticollision inFORMation103. 防撞雷达Anti-collision radar104. 抗干扰试验Anti-jamming test105. 抗无源干扰能力Anti-passive jamming capability106. 反雷达伪装Anti-radar camouflage107. 反雷达复盖层Anti-radar overlay(coverage)108. 反辐射导弹Anti-radiation missile109. 抗饱和Anti-saturation110. 抗风能力Anti-wind capability111. 口面阻挡损失Aperture blockage loss112. 口面照射效率Aperture illumination efficiency113. 区域杂波开关Area clutter switch114. 区域动目标显示Area moving-target indication115. 阵列天线Array antenna116. 人工线(脉冲形成网络)Artificial line(pulse FORM network)117. 人工空间电离干扰Artificial space ionization jamming118. 炮兵侦察校射雷达Artillery target-search and gun-pointing adjustment radar 119. 随机仪表Associated instrumentation120. 天文雷达Astronomical radar121. 大气吸收损耗Atmospheric absorption loss122. 天电干扰Atmospheric interference123. 气压开关Atmospheric pressure switch124. 大气折射误差Atmospheric refraction error125. 衰减Attenuation126. 衰减常数Attenuation constant127. 衰减器Attenuator128. 姿态线Attitude line129. 自相关函数Autocorrelaton function130. 自相关器Auto-correlator131. 相控阵组件的自动检查装置Automatic check device for array elements132. 自动控制系统Automatic control system133. 自动检测Automatic detection134. 自动录取Automatic extraction135. 自动录取设备Automatic Extractor136. 自频调系统的捕捉带宽Automatic frequency control system pull-in bandwidth 137. 自频调系统的跟踪带宽Automatic frequency control system tracking bandwidth 138. 自动频率控制Automatic frequency control(AFC)139. 自动增益控制Automatic gain control (AGC)140. 自动增益控制Automatic gain control (AGC)141. 自动噪声电平调整Automatic noise leveling (ANL)142. 自动相位控制Automatic phase control143. 自动改批Automatically change the batch number144. 自动编批Automatically order the batch number145. 自主显示器Autonomous indicator146. 辅助偏转线圈Auxiliary deflection coil147. 辅助偏转板Auxiliary deflection plates148. 有效性Availability149. 平均功率Average power150. 轴向偏焦Axial offset-focus151. 轴比Axial ratio152. 轴系精度Axis train precision153. 方位轴Azimuth axis154. 方位驱动装置Azimuth drive device155. 方位编码器Azimuth encoder156. 方位信息Azimuth inFORMation157. 方位大齿轮Azimuth main drive gear158. 方位分辨率Azimuth resolution159. 方位同步传动装置Azimuth transmitting selsyn devic。
MTI和MTDppt课件
脉冲响应的傅里叶变换就是频率响应函数:
N 1
Hk ( f )
hik e j 2T
i0
N 1
[
e ]e j 2i( fT k / N ) j 2 ( N 1)k / N
i0
13
滤波器振幅特性为
sin[N(fT - k/N)]
| Hk (f) ||
|
sin[ (fT - k/N)]
N 1
j 2i k
Y (k) x(i)e N , k 0,1,2...N 1
i0
x(0),x(1)...x(N-1)代表N个滤波器的输出,当N取2的整数次幂时,正好可 以使用快速傅里叶变换来实现。
实现MTD的窄带滤波器组的常用方法为 在频域用FFT实现 或 在时域用 FIR滤波器实现
9
零号滤波器,也就是K=0的滤波器,其通带中心位置分别是0,1/T,2/T....
Wik e j[2ik / N ],i 0,1,2... N 1
i表示第几个滤波器的抽头,k表示从0到N-1的标记,每一个k值对应一组 不同的加权值,即对应于不同的多普勒滤波器,每一个k值决定了一个独 立的滤波器的响应。
8
窄带滤波器组的每个抽头有N个输出,并且对应N个加权值,输入信号x(i)
与滤波器组Y(k)关系为
h1(t) (t) (t T ) 傅里叶变换为 H1 (w) 1 e jwt,w 2f
功率增益为 H1(w)H1* (w) (1 e jwT )(1 e jwT ) 2(1 coswT ) 4 sin 2 ( wT )
2
2
双延迟线对消器:
冲激响应:h2 (t) h1(t) h1(t T )
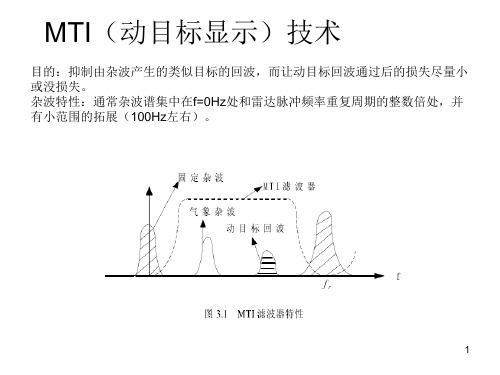
MTI(动目标显示)技术
经典雷达资料第15章动目标显示雷达3

经典雷达资料第15章动目标显示雷达3从实际上讲,采用数字滤波器来分解各种外形的速度照应曲线是能够的[16]。
对Z平面上的每对零点和每对极点而言,都需求两个延迟线,用前馈途径控制零点位置,而用反应途径控制极点位置。
速度照应曲线的外形可以仅用前馈而不用反应来完成。
不采用反应的主要优点是抵消用具有很好的瞬态照应,这是相控阵或系统存在脉冲噪声搅扰时的一项重要的思索要素。
假设相控阵雷达运用反应抵消器,那么在抵消器的瞬态振铃还未下降到允许的电平之前,波束就曾经改动了位置,因此许多脉冲不得不落在波束以外。
人们已提出一种预置技术来缓解这种现象[20],但仅仅局部地降低瞬态动摇时间。
假定只运用前馈,那么在波束移动后仅有3个或4个脉冲被去掉。
采用前馈控制速度照应曲线的外形的缺陷是,对每个用于构成速度照应的零点都需附加一个延迟线。
此外,假定采用零点来构成速度照应,那么曲线就会招致改善因子引入一个固有的损耗。
这个损失能够很重要也能够不重要,需依据杂波谱展宽的水平和抵消所需零点数来确定。
图15.25画出了只用前馈构成的四脉冲抵消器的速度照应曲线和Z平面图。
图中同时还画出了五脉冲前馈抵消器和三脉冲反应抵消器的速度照应曲线。
在给出的抵消器中,无论杂波谱扩展水平为多少,三脉冲反应抵消器的改善因子潜力均比四脉冲前馈抵消器大约好4dB。
图15.24 扫描对具有反应的抵消器改善因子的限制曲线是在假定天线方向图只取sin U/U第一对零点之间的外形时,由计算机计算出来的。
五脉冲抵消器被Zverev称为线性相位[21]MTI滤波器[22]。
4个零点区分位于Z平面实轴的+1,+1,-0.3575和-2.7972。
许多关于滤波器综合的文献都描画过这种线性相位的滤波器,但对MTI运用而言,线性相位并不重要。
如图15.25所示,假定采用非线性相位滤波器只需求极少的脉冲就可以失掉简直和线性相位滤波器相反的照应曲线。
由于在波束照射目的时期可应用的脉冲数是固定的,一个也不能糜费,所以人们应中选用那些只运用极少脉冲数的非线性相位滤波器。
(整理)经典雷达资料-第15章 动目标显示(MTI)雷达-5

经过修正的相位噪声谱密度如图15.48所示。
相对于载波,总噪声功率可由曲线下面的噪声功率积分来决定。
每段功率谱密度随频率变化的方程为图15.46 微波振荡器的单边带相位噪声谱密度和有效噪声密度图15.47 基于系统参数对微波振荡器相位噪声的修正(系统参数见书中内容)图15.48 组合修正和修正后的相位噪声谱密度⎥⎥⎦⎤⎢⎢⎣⎡⨯=)lg(101110)(f f f p f p 斜率 (15.28)式中,P f 1为在f 1的功率谱密度,单位是W/Hz (为方便起见,载波功率假设为1W );“斜率”为该段的斜率,单位是dB/10倍频程;f 1为P f 1处的频率。
对于具有恒定斜率的的每段频谱而言,该方程可以用Vigneri 方法[31]或用带积分功能的计算器(如Hewlett Packard HP-15C )求积分运算。
表15.3给出这个例子的积分结果。
注意:假设条件是载波功率为1W ,如-149.4dBc/Hz 变成1.148×10-15W/Hz ,则在所有段计算积分功率时,先对它们求和,然后转化为dBc 。
最终结果-66.37dBc 就是由振荡器噪声导致的对改善因子I 的限制。
对I SCR (dB )的极限是I (dB )加上目标积累增益(dB )。
表15.3 用图15.47进行校正的如图15.46所示的相位噪声谱密度积分值发射脉冲的时间抖动会使MTI 系统的性能变坏。
时间抖动会使脉冲的前沿及后沿对消失败,而每一个未被对消的部分的幅度为∆t /τ。
这里,∆t 为抖动时间;τ为发射脉冲宽度。
总的剩余功率为2(∆t /τ)2,因此,由于时间抖动对改善因子所产生的限制为)]2/(lg[20t I ∆=τ(dB)。
对改善因子的这种限制是根据非编码发射脉冲并假定接收机带宽与发射脉冲持续时间相匹配得出的。
在脉冲压缩雷达系统中,接收机带宽较宽,以时间带宽积B τ计算,于是每个脉冲结束时杂波剩余功率按B τ积成比例增大。
雷达中英对照

A1. A型显示器(距离显示器) A scope(range indicator)2. 交流二极管充电 A.C. diode charging3. 交流阻抗 A.C. impedance4. 交流谐振充电 A.C. resonant charging5. A/R型显示器A/R scope6. 电枢控制Aarmature control7. 绝对误差Absolute error8. 吸收性复盖层Absorbent overlay(coverage)9. 减震器Absorber10. 吸收式衰减器Absorptive attenuator11. 交流控制系统AC control system12. 加速度信息 Acceleration information13. 附件Accessory14. 捕捉目标试验Acquisition object test15. 截获概率试验 Acquisition probability test16. 低仰角截获试验Acquisition test at the lowest elevation17. 有源滤波器 Active filter18. 有源校正网络Active corrective network19. 有源干扰Active jamming20. 阵列单元的有效阻抗 Active-impedance of an array element21. 执行元件Actuator(driving) element22. 自适应天线Adaptive antenna23. 自适应天线系统Adaptive antenna system24. 自适应能力 Adaptive capability25. 自适应检测器Adaptive detector26. 自适应跳频 Adaptive frequency hopping27. 自适应干扰机Adaptive jammer28. 自适应动目标显示Adaptive MTI29. 加法器Adder30. 导纳 Admittance31. 气悬体干扰Aerosol jamming32. 通风车Air blower carriage33. 空气滤渍器 Air filter34. 空中交通管制雷达Air traffic control radar35. 机载引导雷达Airborne director radar36. 机载动目标显示Airborne MTI37. 机载雷达Airborne radar38. 机载测距雷达 Airborne range-finding radar39. 机载警戒雷达Airborne warning radar40. 机载截击雷达Airborne-intercept radar41. 空心偏转线圈Air-core deflection coil42. 护尾雷达Aircraft tail warning radar(ATWR)43. 飞机跟踪试验Aircraft tracking test44. 全空域录取All-zone extraction45. 换批Alternate the batch number46. 调幅干扰AM jamming47. 调幅调相转换 AM/PM conversion48. 模糊函数Ambiguity function49. 模糊图Ambiguity pattern50. 衰减量 Amount of attenuation51. 放大器Amplifier52. 放大元件Amplifier element53. 增幅管 Amplitron54. 幅度鉴别恒虚警技术 Amplitude discrimination CFAR technique55. 幅裕度Amplitude margin56. 幅度噪声Amplitude noise57. 幅度方向图Amplitude pattern58. 振幅量化Amplitude quantization59. 分层Amplitude quantizing60. 比幅单脉冲雷达 Amplitude-comparison monopulse radar61. 幅频特性 Amplitude-frequency characteristic62. 幅频一致性 Amplitude-frequency equalization63. 调幅信号 Amplitude-modulated signal64. 幅值--相位仪Amplitude-phase meter65. 模拟移相器Analog phase shifter66. 信号的模拟处理 Analog processing of signal67. 模拟信号Analog signal68. 模拟式扫描(连续式扫描) Analog sweep69. 模-数变换 Analog-to-digital conversion70. 模拟显示 Analogue display71. 模拟测距 Analogue ranging72. 频率分析法 Analysis method of frequency domain73. 解析信号Analytic signal74. 角度欺骗干扰 Angle deception jamming75. 角度截获概率 Angle intercept probability76. 角度噪声Angle noise77. 跟踪角速度和角加速度 Angle tracking velocity and acceleration78. 角闪烁误差 Angular glint error79. 角增量正余弦函数运算器Angular increment sine-cosine arithmetic unit80. 天线Antenna81. 天线抗干扰技术Antenna anti-jamming technique82. 天线回零装置Antenna back device83. 天线控制系统Antenna control system84. 孔径型天线的天线效率Antenna efficiency of an aperture-type antenna85. 天线电轴Antenna electrical boresight86. 天线升降机构Antenna elevating subsiding machine87. 天线增益Antenna gain88. 天线裹冰厚度Antenna icing depth89. 天线锁定装置Antenna locking device90. 天线方向图Antenna pattern91. 天线波瓣自动记录仪 Antenna pattern automatic recorder92. 天线座Antenna pedestal93. 天线指向Antenna pointing94. 天线功率增益Antenna power gain95. 天线读数机构Antenna reading device96. 天线风洞试验 Antenna test in tunnel97. 天线测试转台Antenna test turning platform98. 天线拖车Antenna trailer99. 抗有源干扰能力 Anti-active jamming capability100. 抗轰炸能力 Anti-bomb capability101. 抗海浪试验Anti-clutter test against the sea102. 防撞信息 Anticollision information103. 防撞雷达 Anti-collision radar104. 抗干扰试验Anti-jamming test105. 抗无源干扰能力 Anti-passive jamming capability106. 反雷达伪装Anti-radar camouflage107. 反雷达复盖层Anti-radar overlay(coverage)108. 反辐射导弹Anti-radiation missile109. 抗饱和Anti-saturation110. 抗风能力 Anti-wind capability111. 口面阻挡损失Aperture blockage loss112. 口面照射效率 Aperture illumination efficiency113. 区域杂波开关Area clutter switch114. 区域动目标显示Area moving-target indication115. 阵列天线Array antenna116. 人工线(脉冲形成网络) Artificial line(pulse form network)117. 人工空间电离干扰 Artificial space ionization jamming118. 炮兵侦察校射雷达Artillery target-search and gun-pointing adjustment radar 119. 随机仪表Associated instrumentation120. 天文雷达 Astronomical radar121. 大气吸收损耗Atmospheric absorption loss122. 天电干扰Atmospheric interference123. 气压开关Atmospheric pressure switch124. 大气折射误差Atmospheric refraction error125. 衰减Attenuation126. 衰减常数Attenuation constant127. 衰减器Attenuator128. 姿态线 Attitude line129. 自相关函数Autocorrelaton function130. 自相关器Auto-correlator131. 相控阵组件的自动检查装置Automatic check device for array elements 132. 自动控制系统Automatic control system133. 自动检测Automatic detection134. 自动录取Automatic extraction135. 自动录取设备Automatic Extractor136. 自频调系统的捕捉带宽 Automatic frequency control system pull-inbandwidth137. 自频调系统的跟踪带宽 Automatic frequency control system trackingbandwidth138. 自动频率控制Automatic frequency control(AFC)139. 自动增益控制Automatic gain control (AGC)140. 自动增益控制Automatic gain control (AGC)141. 自动噪声电平调整Automatic noise leveling (ANL)142. 自动相位控制Automatic phase control143. 自动改批Automatically change the batch number 144. 自动编批Automatically order the batch number145. 自主显示器 Autonomous indicator146. 辅助偏转线圈 Auxiliary deflection coil147. 辅助偏转板 Auxiliary deflection plates148. 有效性 Availability149. 平均功率Average power150. 轴向偏焦Axial offset-focus151. 轴比Axial ratio152. 轴系精度Axis train precision153. 方位轴Azimuth axis154. 方位驱动装置Azimuth drive device155. 方位编码器Azimuth encoder156. 方位信息Azimuth information157. 方位大齿轮Azimuth main drive gear158. 方位分辨率Azimuth resolution159. 方位同步传动装置 Azimuth transmitting selsyn deviceB160. B型显示器(距离-方位显示器) B scope(range-azimuth indicator)161. 背射天线Backfire antenna162. 回差Backlash163. 齿隙补偿回路Backlash compensating circuit164. 返波管Backward wave tube165. 平衡式天线收发开关 Balanced duplexer166. 平衡混频器Balanced mixer167. 平衡型参量放大器Balanced parametric amplifier168. 平衡器Balancer169. 平衡电感 Balancing inductor170. 滚珠螺旋传动Ball helical gearing171. 校正气球 Balloon for correction172. 气球跟踪试验 Balloon tracking test173. 巴伦(平衡/不平衡变换器) Balun(balanced-unbalanced transformer) 174. 频带扩展Band spread175. 选频放大器 Bandpass amplifier176. 天线的带宽Bandwidth of antenna177. 阻塞式干扰Barrage jamming178. 战场侦察雷达 Battle-field search radar179. 贝叶斯估计Bays estimation180. 波束圆锥角Beam conical angle181. 天线罩波束指向误差 Beam pointing error of a radome182. 波束形状损耗Beam-shape loss183. 方位标志Bearing markers184. 二轴稳定系统Bi-axial stable system185. 二进(双择)检测Binary detection186. 双基地雷达Bistatic radar187. 压制性干扰Blanket jamming (blanking jamming) 188. 盲目着陆雷达Blind landing-aid radar189. 盲相Blind phase190. 盲速Blind speed191. 盲点Blind spot192. 盲区Blind zone193. 闪烁干扰Blinking jamming194. 轰炸雷达Bombing radar195. 校准塔Boresight tower196. 分支式天线收发开关 Branch duplexer197. 分支式电桥Branch hybrid junction198. 击穿 Breakdown199. 击穿 Breakdown200. 击穿功率 Breakdown power201. 宽带中频放大器 Broad band intermediate frequency amplifier202. 体效应二极管本地振荡器 Bulk effect diode local oscillator 203. 烧穿 Burn throughC204. C型显示器(方位-仰角显示器) C scope(azimuth-elevation indicator) 205. 机柜Cabinet206. 机柜、分机结构Cabinet, subassembly207. 电缆附加器Cable adapter208. 电缆盘Cable drum209. 标定误差Calibrated error210. 对消比Cancellation ratio211. 电缆敷设车Carriage for cabling212. 变频车 Carriage for frequency converting 213. 工程修理车Carriage for repair equipment214. 级联放大发射机 Cascade amplifier transmitter215. 卡塞戈伦天线Cassegrain antenna216. 阴极脉冲调制器 Cathode modulator217. 电子束管(阴极射线管) Cathode-ray tube(CRT)218. 空腔型振荡器 Cavity oscillator219. 谐振腔Cavity resonator220. 空腔稳频本地振荡器 Cavity-stabilized local oscillator 221. 电荷耦合器件对消器CCD canceller222. 恒虚警损失CFAR loss223. 恒虚警率接收机 CFAR receiver224. 干扰物Chaff225. 箔条Chaff226. 干扰云 Chaff cloud227. 干扰偶极子Chaff dipole228. 干扰包Chaff package229. 干扰物模拟器Chaff simulator230. 电源电压变化试验 Change of power line voltage231. 天线扫描率变化Change of scanning rate232. 性质改批Change the batch number from the feature 233. 变极化馈电器Changed polarization feed234. 信道化接收机 Channelized receiver235. 特性阻抗Characteristic impedance236. 电荷耦合器件 Charge coupled device(CCD)237. 充电电路Charging circuit238. 充电电感 Charging inductor239. 匣形天线Cheese antenna240. 扼流接头 Choke-flange241. 圆形阵Circular array242. 圆形软波导Circular flexible waveguide243. 圆极化馈电器Circular polarization feed244. 圆极化喇叭Circular polarization horn245. 圆周扫描Circular sweep246. 圆波导Circular waveguide247. 圆极化场矢量Circularly polarized field vector248. 圆极化平面波Circularly polarized plane wave249. 环行器Circulator250. 时钟接收机 Clock receiver251. 闭环带宽 Closed-loop bandwidth252. 闭环系统频率特性 Closed-loop system frequency characteristic253. 闭环控制系统(反馈控制系统) Close-loop control system(feed-back control system)254. 杂波Clutter255. 杂波滤波器 Clutter filter256. 杂波锁定Clutter lock257. 杂波地图Clutter map258. 杂波抑制 Clutter suppression259. 粗精测系统Coarse-fine measurement system260. 同轴电缆Coaxial cable261. 同轴谐振腔Coaxial cavity262. 同轴接头Coaxial connector263. 同轴定向耦合器 Coaxial directional coupler264. 同轴滤波器 Coaxial filter265. 同轴环行电桥Coaxial hybrid ring266. 同轴线Coaxial line267. 同轴旋转关节Coaxial rotary joint268. 同轴转换开关Coaxial switch269. 同轴带线变换器Coaxial-stripline transformer270. 同轴波导变换器Coaxial-waveguide transformer271. 编码发射机 Coded transmitter272. 相关干扰Coherent jamming273. 相干动目标显示Coherent MTI274. 相干振荡器 Coherent oscillator275. 相干接收机 Coherent receiver276. 重合检测Coincidence detection277. 丢失损耗Collapsing loss278. 收集极Collector279. 共线阵 Collinear array280. 彩色显示Color display281. 色噪声Colored noise282. 梳齿滤波器 Comb filter283. 复合控制系统 Combination-loop control system 284. 混合干扰Combinatorial jamming285. 综合环境试验Combined environment test286. 站办通讯机Communication machine in station 287. 复调制干扰 Complex modulated jamming288. 复信号Complex signal289. 复合波形调制干扰 Complex waveform modulated jamming 290. 接地 Conductive earth291. 共形阵天线Conformal array antenna292. 介质导喇叭馈电器 Conical dielectric horn-feed293. 圆锥喇叭Conical horn294. 圆锥扫描雷达Conical scan radar295. 圆锥扫描天线Conical scanned antenna296. 圆锥扫描雷达接收机 Conical scanning radar receiver297. 等高平面位置显示器 Constant altitude PPI298. 恒虚警接收机 Constant false-alarm receiver(CFAR) 299. 恒值控制系统Constant-value control system300. 强迫馈电Constrained feed301. 约束金属板透镜天线 Constrained metal-plate lens antenna302. 连续工作时间 Continuous operating time303. 连续调整系统控制系统 Continuous regulation control system 304. 连续信号 Continuous signal305. 连续波调制信号 Continuous-wave modulated signal 306. 连续波雷达接收机 Continuous-wave radar receiver 307. 对比度Contrast308. 控制系统Control system309. 可控性 Controllability310. 变换元件 Conversion element311. 变频损耗 Conversion loss312. 坐标变换 Conversion of coordinate313. 折算惯量 Converted inertia314. 变频器 Converter315. 卷积 Convolution316. 卷积器 Convolutor317. 冷却剂Coolant318. 致冷参量放大器Cooled parametric amplifier319. 冷却试验Cooling test320. 角反射器Corner reflector321. 角形反射器天线Corner reflector antenna322. 电晕Corona323. 瞄准望远镜Correcting telescope324. 校正元件Corrective element325. 相关系数Correlation coefficient326. 相关函数Correlation function327. 相关接收 Correlation receive328. 相关接收机 Correlation receiver329. 相关时间Correlation time330. 相关器Correlator331. 波纹喇叭(标量喇叭) Corrugated horn(scalar)332. 余割平方天线 Cosecant-squared antenna333. 抗反辐射导弹措施 Counter anti-radiation missile measures 334. 反迫击炮雷达 Counter-mortar radar335. 联轴器Coupling336. 航向标志Course markers337. 互相关函数Cross correlation function338. 交叉极化电平Cross polarization level339. 互相关器Cross-correlator340. 十字缝隙天线Crossed slot antenna341. 正交场平衡混频器 Crossed-field balanced mixer342. 正交场器件(M型器件) Crossed-field devices(M-type devices) 343. 交叉极化损失Cross-polarization loss344. 交叉滚子轴承Crossro roller bearing345. 撬棒电路Crowbar circuit346. 阴极射线管显示CRT-display347. 立方相差Cube phase error348. 游标Cursor349. 切割抛物面天线Cut parabolic antenna350. 截止式衰减器Cut-off attenutor351. 截止频率Cut-off frequency352. 截止波长Cut-off wavelength353. 连续波干扰CW jamming354. 连续波雷达CW radar355. 连续波雷达发射机 CW radar transmitter 356. 摆线针轮减速器Cycloidal gear reductor 357. 油缸Cylinder358. 圆柱阵Cylindrical array359. 柱面波Cylindrical waveD360. D型显示器 D scope361. 直流阻抗 D.C. impedance362. 直流谐振充电 D.C. resonant charging 363. 直流谐振二极管充电 D.C. resonant diode charge 364. 数据处理Data processing365. 数据处理Data processing366. 数据率Data rate367. 数据记录设备Date recorder equipment 368. 直流控制系统DC control system369. 死区Dead zone370. 欺骗性干扰 Deception jamming371. 雷达诱饵Decoy372. 偏转通道带宽Deflection channel bandwidth 373. 偏转线圈Deflection coil374. 偏转调制 Deflection modulation 375. 偏转板Deflection plates376. 偏转稳定(建立)时间 Deflection settling time377. 散焦保护电路Defocusing protection circuit 378. 耦合度Degree of coupling379. 辐射隔离度Degree of radiant protection 380. 延迟线对消器Delay line canceller381. 延迟线滤波器 Delay line filter382. 延时充电电路Delayed charging circuit 383. 密度检测Density detection384. 去极化Depolarization385. 降优值电路De-Q-ing circuit386. 削尖峰电路Despiking circuit387. 检测准则Detection criterion388. 发现概率 Detection probability 389. 位移式操作Deviation operation390. 介质干扰杆Dielectric chaff rod391. 介质透镜天线Dielectric lens antenna 392. 介质移相器Dielectric phase shifter 393. 介质棒天线Dielectric rod antenna 394. 差增益Difference gain395. 差信号Difference signal396. 差斜率Difference slope397. 指触光敏装置Digilux touch mask398. 数字控制系统Digital control system 399. 数字显示Digital display400. 数字滤波器 Digital filter401. 数字积累器Digital integrator402. 数字匹配滤波器 Digital matched filter403. 数字动目标显示Digital MTI (DMTI)404. 数字移相器Digital phase shifter405. 信号的数字处理 Digital processing of signal 406. 数字测距Digital ranging407. 数字式分解Digital resolving408. 数字信号Digital signal409. 数字式扫描(量化式扫描) Digital sweep410. 数-模变换 Digital-to-analog conversion 411. 后馈带反射盘的振子馈电器Dipole-disk feed for rear-feed 412. 直接定位Direct location413. 引导式干扰Directed jamming414. 方向控制阀Directing-control valve415. 定向耦合器 Directional coupler416. 定向互导 Directional mutual conductance 417. 方向性增益Directive gain418. 方向性Directivity419. 引导雷达Director radar420. 直观贮存管Direct-view storage tube421. 离散付里叶变换Discrete Fourier transform 422. 离散信号Discrete signal423. 鉴频器Discriminator424. 色散Dispersion425. 色散滤波器 Dispersion filter426. 显示方式Display modes427. 道尔夫-切比雪夫阵列天线Dolph-chebyshef array antenna 428. 多普勒雷达 Doppler radar429. 多普勒信号 Doppler signal430. 双重平衡混频器 Double balanced mixer431. 二次对消器 Double canceller432. 双偏管 Double deflection CRT433. 双增益级对数放大器 Double gain stage logarithmic amplifier 434. 双极化接收 Double polarization receive435. 双极点滤波器 Double pole filter436. 双脊波导 Double ridge waveguide437. 双门限检测 Double threshold detection438. 双门限检测器 Double threshold detector439. 双T接头 Double T-junction440. 双偏转 Double-deflection441. 后馈双喇叭馈电器 Double-horn feed for rear-feed442. 后馈双缝隙馈电器 Double-slote feed for rear-feed443. 双调谐中频放大器 Double-tuned intermediate frequency amplifier 444. 传动机构Drive445. 干燥充气机 Dry-air filling machine446. 双模式干扰机Dual mode jammer447. 双链传动装置Dual train drive device448. 等效负载Dummy load449. 天线收发开关Duplexer450. 气体放电管收发开关 Duplexer of gas discharge tube451. 工作比Duty cycle452. 动态特性Dynamic characteristic453. 动态检查Dynamic check454. 动态聚焦Dynamic focus455. 动态聚焦线圈Dynamic focusing coil456. 动态聚焦电极Dynamic focusing electrode457. 动态滞后误差Dynamic lag errorE458. E面(H面)折叠双T E plane (H plane) magic-T459. E面T形接头 E plane T-junction460. E面弯波导 E plane waveguide bend461. E主平面 E principal plane462. E型显示器(距离-仰角显示器) E scope(range-elevation indicator) 463. 预警雷达Early warning radar464. 回波箱 Echo-box465. 边导模隔离器 Edge-guide mode isolator466. 天线的有效面积 Effective area of an antenna467. 有效带宽Effective bandwidth468. 有效辐射功率Effective radiation power(E.R.P.)469. 有效时宽Effective time width470. 电调衰减器Electric control attenuator471. 电控转换开关Electric control switch472. 电屏蔽Electric shield473. 电调滤波器 Electric tuning filter474. 天线电轴Electrical boresight of antenna475. 电气-掖压控制系统 Electric-hydraulic control system476. 电液伺服阀Electro-hydraulic servo value477. 电液伺服阀Electro-hydraulic servo valve478. 场致发光显示板Electroluminescent display panel479. 电磁兼容性 Electromagnetic compatibility480. 电磁屏蔽Electro-magnetic shield481. 电子频移Electron frequency drift482. 电子抗干扰Electronic anti-jamming483. 电子反侦察 Electronic anti-reconnaissance484. 电子注聚焦Electronic beam focusing485. 电子防御措施 Electronic counter-countermeasures (ECCM) 486. 反电子措施 Electronic countermeasures (ECM)487. 电子干扰Electronic jamming488. 电子侦察 Electronic reconnaissance489. 电扫描天线Electronic Scanned antenna490. 电子调谐率Electronic tuning rate491. 电子战Electronic warfare (EW)492. 电子对抗Electronic warfare (EW)493. 电扫描雷达Electronically scanned radar494. 静电偏转管Electrostatic deflection CRT495. 静电聚焦Electrostatic focus496. 静电偏转Electrostatic-deflection497. 单元室Element cell498. 阵中单元增益Element gain in an array499. 单元栅格Element grid500. 阵中单元方向图Element pattern in an array501. 单元间距Element spacing502. 俯仰轴Elevation axis503. 俯仰驱动装置Elevation drive device504. 仰角信息Elevation information505. 俯仰大齿轮Elevation main drive gear506. 仰角分辨率Elevation resolution507. 俯仰同步传动装置 Elevation transmitting selsyn device 508. 俯仰-方位型天线座 Elevation-azimuth type antenna pedestal 509. 椭圆软波导 Elliptical flexible waveguide510. 椭圆波导 Elliptical waveguide511. 椭圆极化场矢量 Elliptically polarized field vector512. 椭圆极化平面波 Elliptically polarized plane wave513. 密封试验Encapsulation test514. 末制导雷达End-guidance radar515. 环境假设Environment assumption516. 等相位面 Equiphase surface517. 车厢设备布局 Equipment position arrangement in shelter 518. 误差信号分解器Error signal resolver519. 误差敏感元件(测量元件,比较元件) Error-sensitive element(measurementelement, parative element) 520. 蒸发冷却Evaporative cooling521. 电子战模拟试验场EW simulation test range522. 电子对抗支援措施 EW support measures523. 精确频率Exact frequency524. 激励系数Excitation coefficients525. 激励振动频率 Excited vibration frequency526. 激励器(预调器、触发器) Exciter(premodulator, trigger)527. 扩展系数Expansion coefficient528. 投掷式干扰机Expendable jammer529. 暴露区 Exposed zone530. 延伸馈电器Extended feeds531. 录取显示器Extraction display532. 录取误差Extraction error533. 录取存贮器Extraction memory534. 录取设备Extractor535. 外推(预测) Extrapolation(prediction)536. 极窄脉冲雷达Extra-short pulse radarF537. F型显示器(角度差显示器) F scope(angle error indicator)538. 屏蔽系数(屏蔽隔离度) Factor of shielding(shielding strength) 539. 虚警概率False alarm time540. 扇形波束天线Fan-beam antenna541. 法拉第旋转式环行器Faraday rotation circulator542. 法拉第旋转效应隔离器Faraday rotation isolator543. 远场区(佛累和费区) Far-field region (Frouhofer region) 544. 远场区方向图Far-field region pattern545. 快速付里叶变换Fast Fourier transform546. 快时间常数电路Fast time constant circuit (FTC)547. 馈电器Feed548. 馈线Feed line549. 馈电网络Feed network550. 相控阵馈电网络Feed networks for phased array551. 反馈Feedback552. 前馈Feedforward553. 篱笆Fence554. 铁氧体天线收发开关 Ferrite duplexer555. 铁氧体移相器Ferrite phase shifter556. 铁氧体开关Ferrite switch557. 导光纤维管Fibre-optic CRT558. 激磁控制Field control559. 外场试验(现场试验) Field test560. 场移式隔离器 Field-displacement isolator561. 滤波器 Filter562. 滤波 Filter563. 火控雷达Fire control radar564. 一阶微分环节First derivative element565. 一阶无差系统First order astatic system566. 五喇叭馈电器Five-horn feed567. 固定式偏转线圈Fixed deflection coil568. 固定雷达Fixed radar569. 固定目标检查Fixed-object check570. 平头缝隙天线Flat headed antenna571. 软同轴线Flexible coaxial line572. 软反馈Flexible feedback573. 软波导Flexible waveguide574. 飞行试验Flight calibration575. 浮动极调制器(调制阳极脉冲调制器)Floating desk modulator (modulating anode pulse ulator) 576. 溢流阀 Flood valve577. 流量控保电路Flow control protection circuit578. 流量控制阀Flowrate-control valve579. 调频干扰FM jamming580. 泡沫天线罩Foamradome581. 聚焦Focus582. 聚焦线圈Focus coil583. 焦距Focus distance584. 焦点(线)Focus(focal line)585. 散焦Focus-out586. 折合振子Folded dipole587. 强迫通风 Forced ventilation588. 前向波管Forward wave tube589. 四点接触向心推力轴承 Four point contract center-orientedthrust ball bearing590. 四轴稳定系统Four-axial stable system591. 四喇叭馈电器Four-horn feed592. 骨架Frame593. 自由空间波长 Free space wavelength594. 自由空间衰减 Free-space attenuation595. 频率捷变雷达Frequency agile radar596. 频率捷变 Frequency agility597. 频率特性Frequency characteristic598. 频率去相关Frequency decorrelation599. 频率鉴别Frequency discrimination600. 鉴频系数Frequency discrimination figure601. 鉴频器幅度对称性Frequency discriminator amplitude frequency symmetry602. 鉴频器交界频率 Frequency discriminator cross-over frequency603. 鉴频器失真度 Frequency discriminator degree of frequency distortion 604. 鉴频器频率对称性Frequency discriminator frequency symmetry605. 鉴频器通频带 Frequency discriminator pass band606. 频率分集雷达Frequency diversity radar607. 跳频 Frequency hopping608. 调频雷达发射机 Frequency modulation radar transmitter 609. 倍频本地振荡器 Frequency multiplication local oscillator 610. 频率预选Frequency pre-selection611. 频率牵引系数Frequency pulling figure612. 频率范围(带宽) Frequency range (band width)613. 频率选择抗干扰技术 Frequency selection anti-jamming technique 614. 频率灵敏度 Frequency sensitivity615. 频率瞄准误差Frequency spot error616. 频率稳定度 Frequency stability617. 频率综合器Frequency synthesizer618. 频率捷变本地振荡器 Frequency-agile local oscillator619. 频率捷变信号Frequency-agile signal620. 频率编码脉冲压缩 Frequency-coded pulse compression621. 调频雷达 Frequency-modulated radar622. 调频雷达接收机 Frequency-modulated radar receiver623. 调频信号 Frequency-modulated signal624. 频率扫描天线Frequency-scanned antenna625. 扫频本地振荡器 Frequency-scanned local oscillator626. 频率扫描雷达Frequency-scanned radar627. 菲涅尔区Fresnel region628. 菲涅尔区方向图Fresnel region pattern629. 摩擦起伏Friction fluctuation630. 主模 Fundamental mode631. 引信干扰Fuse jammingG632. G型显示器G scope633. G/T比G/T ratio634. 增益Gain635. 门开关Gate switch636. 高斯白噪声Gaussion white noise637. 齿轮传动误差Gear transmission error638. 总体抗干扰技术General anti-jamming technique639. 雷达综合测试仪General radar instrument640. 基准电压Generator for reference voltage641. 抛物面天线几何轴 Geometrical axis of parabolic antenna 642. 射流管式电液伺服阀 Get-type electro-hydraulic servo valve 643. 图形失真Graphic distortion644. 图形失真校正Graphic distortion correction645. 图象稳定度 Graphic stability646. 图形显示Graphical display647. 栅瓣Grating lobe648. 栅瓣图Grating lobe pattern649. 格雷戈伦天线Gregarain antenna650. 栅极脉冲调制器 Grid modulator651. 栅状反射面 Grid reflecting surface652. 车厢接地椿 Grounding post for shelter653. 群速 Group velocity654. 制导雷达Guidance radar655. 波导波长Guide wavelength656. 引导设备Guiding device657. 炮瞄雷达Gun directing radar658. 炮位侦察校射雷达 Gun's position target-search and gun-pointingadjustment radar659. 回旋管GyrotronH660. H面T形接头H plane T-junction661. H面弯波导H plane waveguide bend662. H主平面H principal plane663. H型显示器H scope664. 半功率点波瓣宽度 Half-power beamwidth (3 db beamwidth) 665. 半波振子天线Half-wave dipole antenna666. 电缆手推车Hand-cart for cable drum667. 港口雷达Harbor radar668. 硬限幅器Hard limiter669. 刚管脉冲调制器 Hard tube pulse modulator670. 谐波传动Harmonic gearing671. 谐波雷达Harmonic radar672. 下视显示器Head-down indicator673. 平视显示器Head-up indicator674. 热管Heat pipe675. 散热器Heat sink676. 高度信息Height information677. 测高雷达Height-finding radar678. 螺旋天线Helical antenna679. 密封窗 Hermetic window680. 隐蔽锥扫Hide conical-scan681. 高亮度显示High brightness display682. 高压转换时间High voltage switching time683. 高次模Higher-order mode684. 高频放大器 High-frequency amplifier685. 高频信号 High-frequency signal686. 高温试验High-temperature test687. 极窄视频脉冲通过电路 High-video pass (HVP)688. 希尔伯特变换Hilbert transform689. 孔型定向耦合器 Hole-type directional coupler 690. 同态信号处理Homomorphic signal processing 691. 水平极化场矢量 Horizontally polarized field vector 692. 喇叭天线Horn antenna693. 喇叭抛物反射面天线 Horn parabolic reflector antenna 694. 高压延时保护电路 HV delaytime protection circuit 695. 电桥Hybrid junction696. 环行电桥Hybrid ring697. 混合型可控硅磁脉冲调制器Hybrid SCR698. 液压放大器Hydraulic amplifier699. 液压缓冲器Hydraulic buffer700. 液压随动装置Hydraulic follow-up unit701. 液压马达Hydraulic motor702. 液压泵Hydraulic pumpI703. I型显示器(径向距离-方位显示器) I scope(radial range-azimuth indicator) 704. 敌我识别雷达Identifier of foe or friend(IFF)705. 图像显示Image display(picture display)706. 镜频回收Image recovery707. 镜象回收混频器Image recovery mixer708. 镜频反射Image reflection709. 镜频抑制Image rejection710. 虚频特性Imaginary frequency characteristic711. 阻抗Impedance712. 阻抗匹配Impedance match713. 天线阻抗匹配Impedance match of antenna714. 渐变式阻抗变换器Impedance taper715. 阻抗变换器Impedance transformer716. 改善因子 Improvement factor(IF)717. 斜缝隙天线阵Inclined slot array antenna718. 插入扫描Incorporated sweep719. 显示器电磁屏蔽Indicator electromagnetic screen720. 间接定位Indirect location721. 感应移相器 Induction phase shifter722. 工业干扰 Industrial interference723. 惯性环节(非周期环节) Inertia element (aperiodic element)724. 充气天线罩Inflation radome725. 红外跟踪器Infra-red tracker726. 红外跟踪试验Infra-red tracking test727. 红外雷达跟踪转换试验 Infra-red-radar tracking transfer test 728. 注入锁定本地振荡器 Injection locked local oscillator729. 进油路Inlet oil line730. 天线输入导纳 Input admittance of an antenna731. 输入阻抗 Input impedance732. 天线输入阻抗 Input impedance of an antenna733. 插入损耗Insertion loss734. 天线罩插入相移Insertion phase of a radome735. 插入相移Insertion phase shift736. 瞬时自动增益控制 Instantaneous automatic gain control (IAGC) 737. 射频包络Instantaneous bandwidth738. 瞬时测频接收机 Instantaneous frequency measurement receiver 739. 积分环节Integral element740. 积分折射率仪Integral refractive index meter741. 指向累计检测器Integration detector742. 积累损耗Integration loss743. 积分器Integrator744. 辉亮控制Intensity control745. 辉亮校正Intensity correction746. 辉亮调制 Intensity modulation747. 频率截获概率 Intercept probability of frequency748. 截取功率Intercepted power749. 杂波间可见度 Inter-clutter visibility (ICV)750. 雷达/计算机接口设备 Interface equipment of radar-computer 751. 干涉性复盖层 Interference overlay(coverage)752. 干扰信号Interference signals and/or jamming signals 753. 干涉仪系统Interfermeter system754. 中频Intermediate frequency755. 中频放大器Intermediate frequency amplifier756. 中频放大器的中心频率Intermediate frequency amplifier center frequency 757. 中频放大器增益 Intermediate frequency amplifier gain 758. 中频对消器Intermediate frequency canceller759. 中频积累Intermediate frequency integration760. 前置中频放大器Intermediate frequency preamplifier761. 中频信号Intermediate frequency signal762. 内光点录取设备Internal spot extraction equipment763. 内插(平滑) Interpolation(smoothing)764. 脉内跳频Interpulse frequency shifting765. 询问机Interrogator766. 去反峰电路Inverse clipper circuit767. 倒相干扰Inverse conical scan jamming768. 反峰阻尼电路Inverse damping circuit769. 逆滤波器 Inverse filter770. 逆增益干扰Inverse gain jamming771. 反概率准则(后验概率准则) Inverse probability criterion772. 反概率接收机 Inverse probability receiver773. 铁芯偏转线圈Iron-core deflection coil774. 阵列单元的孤立阻抗 Isolated impedance of an array element775. 隔离比Isolation776. 天线间的隔离Isolation between antennas 777. 隔离器IsolatorJ778. J型显示器(圆扫显示器) J scope(circular sweep indicator) 779. 干扰机Jammer780. 干扰压制系数Jamming blanket factor781. 干扰压制区Jamming blanketed zone782. 干扰调制样式 Jamming modulation type 783. 干扰参数Jamming parameter784. 干扰功率密度Jamming power density785. 干扰信号带宽 Jamming signal band width 786. 干扰强度Jamming strength787. 进气道干扰试验Jamming test of duct788. 操纵柄JoystickK789. K型显示器K scope790. 卡尔曼滤波器 Kalman filter791. 速调管KlystronL。
经典雷达资料-第15章 动目标显示(MTI)雷达-3

图15.24显示了反馈对改善因子I的影响。
这些曲线是在假设天线的方向图只取(sin U)/U第一对零点之间的曲线情况下计算出的。
图示的无反馈的几条曲线与如图15.12所示显示的具有高斯形状方向图的理论曲线几乎完全相同(说明反馈对三路延迟对消器影响是一条曲线而不是直线,这是因为在3个零点中,已有两个零点不在原点上,并且根据波束宽度内有14个脉冲的实际情况,它们已沿单位圆移动了最佳量。
因此,当波束宽度内有40个脉冲时,这两个零点由于离原点太远而不起太大的作用)。
从理论上讲,采用数字滤波器来合成各种形状的速度响应曲线是可能的[16]。
对Z平面上的每对零点和每对极点而言,都需要两个延迟线,用前馈路径控制零点位置,而用反馈路径控制极点位置。
速度响应曲线的形状可以仅用前馈而不用反馈来实现。
不采用反馈的主要优点是对消器具有很好的瞬态响应,这是相控阵或系统存在脉冲噪声干扰时的一项重要的考虑因素。
如果相控阵雷达使用反馈对消器,则在对消器的瞬态振铃还未下降到容许的电平之前,波束就已经改变了位置,因而许多脉冲不得不落在波束以外。
人们已提出一种预置技术来缓解这种现象[20],但仅仅部分地降低瞬态稳定时间。
若只使用前馈,则在波束移动后仅有3个或4个脉冲被去掉。
采用前馈控制速度响应曲线的形状的缺点是,对每个用于形成速度响应的零点都需附加一个延迟线。
此外,若采用零点来形成速度响应,则曲线就会导致改善因子引入一个固有的损耗。
这个损失可能很重要也可能不重要,需根据杂波谱展宽的程度和对消所需零点数来确定。
图15.25画出了只用前馈形成的四脉冲对消器的速度响应曲线和Z平面图。
图中同时还画出了五脉冲前馈对消器和三脉冲反馈对消器的速度响应曲线。
在给出的对消器中,无论杂波谱扩展程度为多少,三脉冲反馈对消器的改善因子潜力均比四脉冲前馈对消器大约好4dB。
图15.24 扫描对具有反馈的对消器改善因子的限制曲线是在假定天线方向图只取sin U/U第一对零点之间的形状时,由计算机计算出来的。
雷达的常见分类以及典型应用

雷达的常见分类以及典型应用雷达,是英文Radar的音译,源于radio detection and ranging的缩写,意思为'无线电探测和测距',即用无线电的方法发现目标并测定它们的空间位置。
因此,雷达也被称为“无线电定位”。
雷达是利用电磁波探测目标的电子设备。
雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。
0101典型雷达应用监视——军事、民用航空交通管制、地面、空中、沿海警戒、卫星搜索和跟踪——军事目标搜索和跟踪火控——为火控系统提供信息(主要包括目标方位、仰角、距离和速度)。
导航——卫星、航空、航海、陆地导航汽车——碰撞警告,自适应巡航控制(ACC),避免碰撞液位距离测量——液体的液位监控,距离测量等等。
近炸引信——军事用途: 制导武器系统需要一个接近触发引信爆炸弹头高度计——飞机或太空船的高度计,为民用和军用使用地形回避——机载军事应用二次雷达——异频雷达收发机,接收目标反射的编码信号气象——避免风暴,变风警告,气象测绘空间遥感——军事基地监视、地面测绘,空间环境探索安全——隐藏武器检测、军事基地监视02雷达频段和应用不同频段电磁波在大气传播中衰减03常见雷达类型连续波雷达固定频率的连续波(CW型)雷达系统可用于测量速度。
但是,它不能提供任何距离信息。
天线发射某一固定频率的信号。
在移动目标(例如汽车)上反射回来的信号产生了多普勒频移。
也就是说会在略微偏移的频率上接收到反射信号。
通过比较收发信号的频率,我们可以确定目标的径向速度(而不是距离)。
基于这个原理,一个典型的应用是交通监测雷达。
雷达移动传感器也是基于相同的原理,但由于可能存在变化的干扰环境,它们还必须具有能够检测缓慢变化场强的能力。
交警使用的超速检测雷达(speed traps)也是采用这种技术。
如果一个特定距离的目标超速了,摄影机就拍下照片。
雷达知识点

【雷达任务:测目标距离、方位、仰角、速度;从目标回波中获取信息【雷达工作原理:发射机在定时器控制下,产生高频大功率的脉冲串,通过收发开关到达定向天线,以电磁波形式向外辐射。
在天线控制设备的控制下,天线波束按照指定方向在空间扫描,当电磁波照射到目标上,二次散射电磁波的一部分到达雷达天线,经收发开关至接收机,进行放大、混频和检波处理后,送到雷达终端设备,能判断目标的存在、方位、距离、速度等。
【影响雷达性能指标:脉冲宽度(窄),天线尺寸(大),波束(窄),方向性。
【测角:根据接收回波最强时的天线波束指向【雷达是如何获取目标信息的?【雷达组成:天线,发射机,接收机,信号处理机,终端设备(电源,显示屏),收发转换开关【发射机工作原理:为雷达提供一个载波受到调制的大功率射频信号,经馈线和收发开关由天线辐射出去。
【发射机基本组成:单级振荡式:脉冲调制器,大频率射频振荡器,电源。
主振放大式:脉冲调制器,中间和输出射频功放,电源,定时器,固体微波源(主控振荡器,用来产生射频信号)工作过程:(1)单级振荡式:信号由振荡器产生,受调制(2)主振放大式:信号由固体微波源经过倍频后产生,经射频放大链进行放大,各级都需调制(脉冲调制器),定时器协调工作。
优缺点:单击振荡式:简单经济轻便,频率稳定度差,无复杂波形;主振放大式:频率稳定度高,相位相参信号,有复杂波形,适用频率捷变雷达【发射机质量指标:(1)工作频率(波段)(2)输出功率:影响威力和抗干扰能力。
峰值功率(脉冲期间射频振荡的平均功率)和平均功率(脉冲重复周期内输出功率的平均值)。
(3)总效率Pt/P。
(4)调制形式:调制器的脉冲宽度,重复频率,波形。
(5)信号稳定度/频谱纯度,即信号各项参数。
【调制器组成:电源,能量储存,脉冲形成【调制器任务与作用:为发射机的射频各级提供合适脉冲,将一个信号载到一个比它高的信号上【仿真线:由于雷达的工作脉冲宽度多半在微秒级别以上,用真实线长度太长,因此在实际中是用集总参数的网络代替长线,即仿真线【刚/软性开关:刚性开关的电容储能部分放电式调制器,特点为部分放电,通电利索;软性开关的人工线性调制器,特点为完全放电,效率高,功率大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
经过修正的相位噪声谱密度如图15.48所示。
相对于载波,总噪声功率可由曲线下面的噪声功率积分来决定。
每段功率谱密度随频率变化的方程为图15.46 微波振荡器的单边带相位噪声谱密度和有效噪声密度图15.47 基于系统参数对微波振荡器相位噪声的修正(系统参数见书中内容)雷 达 手 册·576·图15.48 组合修正和修正后的相位噪声谱密度⎥⎥⎦⎤⎢⎢⎣⎡⨯=)lg(101110)(f f f p f p 斜率 (15.28)式中,P f 1为在f 1的功率谱密度,单位是W/Hz (为方便起见,载波功率假设为1W );“斜率”为该段的斜率,单位是dB/10倍频程;f 1为P f 1处的频率。
对于具有恒定斜率的的每段频谱而言,该方程可以用Vigneri 方法[31]或用带积分功能的计算器(如Hewlett Packard HP-15C )求积分运算。
表15.3给出这个例子的积分结果。
注意:假设条件是载波功率为1W ,如-149.4dBc/Hz 变成1.148×10-15W/Hz ,则在所有段计算积分功率时,先对它们求和,然后转化为dBc 。
最终结果-66.37dBc 就是由振荡器噪声导致的对改善因子I 的限制。
对I SCR (dB )的极限是I (dB )加上目标积累增益(dB )。
表15.3 用图15.47进行校正的如图15.46所示的相位噪声谱密度积分值发射脉冲的时间抖动会使MTI 系统的性能变坏。
时间抖动会使脉冲的前沿及后沿对消失败,而每一个未被对消的部分的幅度为∆t /τ。
这里,∆t 为抖动时间;τ为发射脉冲宽度。
总的剩余功率为2(∆t /τ)2,因此,由于时间抖动对改善因子所产生的限制为)]2/(lg[20t I ∆=τ(dB)。
第15章 动目标显示(MTI )雷达·577·对改善因子的这种限制是根据非编码发射脉冲并假定接收机带宽与发射脉冲持续时间相匹配得出的。
在脉冲压缩雷达系统中,接收机带宽较宽,以时间带宽积B τ计算,于是每个脉冲结束时杂波剩余功率按B τ积成比例增大。
线性调频脉冲压缩系统对改善因子的限制为)]2/(lg[20ττB t I ∆=。
脉冲压缩雷达系统采用脉组脉冲波形,就应将上式中的因子2再乘以波形中的子脉冲数。
例如,对于有13个子脉冲的Barker 码来说,对改善因子I 的限制为)]13132/(lg[20t I ∆⨯=τ dB (15.29)脉冲宽度的抖动产生的剩余为时间抖动剩余的一半,并且有ττB I PW lg 20∆= dB (15.30) 式中,∆PW 为脉冲宽度的抖动。
发射脉冲的幅度抖动也会对改善因子产生限制,这时有AA I ∆=lg 20 dB (15.31) 式中,A 为脉冲的幅度;∆A 为脉冲之间的幅度变化。
因为总会出现很多达不到限幅电平的杂波,故即使在对消器前采用限幅的系统中,此种限制也仍然适用。
但是,在大多数的发射机中,当频率稳定度或相位稳定度满足要求后,幅度的抖动就不大起作用了。
在A/D 转换器中,取样时间的抖动也会限制MTI 的性能,如果脉冲压缩在A/D 变换之前或没有脉冲压缩,则限制为ττB J I lg 20= dB (15.32) 式中,J 为时间抖动;τ为发射脉冲宽度;τB 为时间带宽乘积。
如果脉冲压缩在A/D 变换之后,则限制为ττJB I lg 20= dB (15.33) 对可得到的MTI 改善因子的各项限制已归纳在表15.4内。
这时假设各项不稳定的峰-峰值是在脉冲到脉冲之间发生的,在脉冲间进行参差MTI 运用时也往往如此。
若已知不稳定为随机的,则在这些公式中的峰值可用脉冲之间峰-峰值的均方根代替,所得出的结果基本上与Steinberg 的结论相同[32]。
表15.4 不稳定的限制雷 达 手 册如果不稳定出现在某些已知的频率上,如高压电源的纹波,则有关不稳定的效果可按等效多普勒频率的目标在MTI 系统速度响应曲线上的响应来确定。
例如,当响应比最大响应低6dB 时,则对改善因子I 的限制差不多要比由表15.4的公式计算出的限制小6dB 。
如果全部不稳定源是互相独立的,并且通常都是这种情况,则各剩余杂波功率可相加,以确定对MTI 性能的总限制。
脉冲的频率或相位变化如能从脉冲到脉冲准确地重复出现,则它们就不会对MTI 的良好运作产生什么影响。
惟一应当注意的问题是,如果在发射脉冲时间内相位有漂移或相参振荡器或稳定本振有失调而使得回波脉冲与调谐好的中频频率有显著的失谐时,则灵敏度就会降低。
如果容许在脉内有1rad 的相位漂移,则系统的失谐即可高达1/(2πτ)Hz ,并且仍旧不会使MTI 的性能变坏。
为了举例说明脉冲间的稳定性要求,我们以一部频率为3 000MHz 、发射2μs 的非编码脉冲的雷达为例,并且没有单项系统不稳定性会将100 n mile 距离上的MTI 改善因子限制到低于50dB ,即电压比为316:1。
发射机的脉间均方根频率变化(若采用脉控振荡器)必须小于Hz 5043161=π=∆τf 即稳定度约为2×10-7。
发射机的脉间均方根相移变化(若采用功率放大器)必须小于18.0rad 00316.03161===∆φ 稳定本振或相参振荡器的频率变化必须小于Hz 4.0)1036.12100)(2(31616=⨯⨯π=∆-f 即对稳定本振(频率约为3GHz )而言,短期频稳度为10-10;而对相参振荡器(假定中频为30MHz )而言,短期频稳度为10-8。
相参振荡器(若采用脉冲振荡器)必须锁定在下述范围内第15章 动目标显示(MTI )雷达·579·18.0rad 00316.03161===∆φ 定时脉冲的抖动必须小于s 105.423161*********--⨯=⨯==∆τt脉冲宽度的抖动必须小于s 106316102131696--⨯=⨯==∆τPW 脉冲幅度的变化必须小于3.000316.03161===∆A A % A/D 取样的时间抖动必须小于s 106316102131696--⨯=⨯==τJ 以上各项要求中惟一不容易满足的就是稳定本振的稳定度[33][34]和相参振荡器的锁定精度。
然而,在大带宽(窄压缩后脉冲)系统中,时间抖动要求变得很重要,并且可能要求在系统关键部位采用专门的时钟再生电路。
量化噪声对改善因子的影响A/D 引入的量化噪声会对MTI 所能获得的改善因子产生限制。
考虑如图15.49所示的常规的视频MTI 系统。
因为峰值信号电平受到线性限幅放大器的控制,相位检波器输出的峰值偏移量也已知,因此设计的A/D 应能覆盖此偏移量。
如果A/D 采用N 位,并且相位检波器的输出从-1~+1,则量化间隔为2/(2N -1)。
由A/D 所引入的信号电平偏差的均方根值为]12)12/[(2-N 。
当信号达到相位检波器的全部偏移时,将模/数转换器对信号电平的影响代入表15.4的公式,即可求出对MTI 改善因子的限制,即]0.3)12lg[(20]0.3)12[(1lg 20lg 201-=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=∆=-N N A A I (15.34) 因为两个正交通道都产生独立的A/D 噪声,故对全距离信号改善因子的平均限制为]5.1)12lg[(20]2/0.3)12lg[(20-=-=N N I (15.35)正常情况下,如果信号并没有达到A/D 转换器的全部偏移,那么量化对I 的限制要相对重些。
例如,如果设计一个系统使所关心的最强杂波平均电平比A/D 转换器峰值小3dB ,则对I 的限制会成为]75.0)12lg[(20-N (见表15.5)。
雷达手册·580·图15.49 数字MTI设想表15.5 A/D量化对I限制的典型值A/D量化噪声的讨论是在假定A/D转换器为理想情况下进行的。
特别是在高变换速率的情况下,许多A/D转换器是不理想的。
这同样引起比这里预想的更严重的系统限制(见15.12节)。
用脉冲之间的均方根偏差来代替式(15.34)中的 A,且假设脉冲之间的量化误差相互独立。
Brennan和Reed[35]曾计算过,当量化间隔与脉冲间的杂波变化粗略可比时(这就会使数/模转换器输出一系列的具有同一电平的脉冲序列),就会出现“无噪声效应”。
不过在采用实际的系统参数时,不会出现这种“无噪声效应”。
第15章动目标显示(MTI)雷达·581·脉冲压缩问题当MTI系统与脉冲压缩技术一起使用时,则系统在杂波中检测目标的性能可能和一部发射等效的窄脉冲系统的性能一样好,也可能不如一部发射同样宽度的非编码脉冲的系统的性能好。
在上述两个极端情况之间,系统性能的好坏程度取决于杂波环境的类型、系统的不稳定性和所使用的信号处理方式。
除非对系统的不稳定采取专门的措施,否则MTI-脉冲压缩雷达系统在杂波环境下就可能完全不能工作。
脉冲压缩接收机与MTI一起使用的理想情况如图15.50(a)所示。
如果脉冲压缩系统是理想的,则被压缩后的脉冲看起来就像雷达在发射和接收窄脉冲一样,而MTI的处理也和没有用脉冲压缩时相同。
实际上,由于两方面的原因,压缩脉冲是有时间副瓣的。
第一个原因是系统的设计,如有的元件可能与频率成非线性关系等。
这些副瓣是稳定不变的,也就是说,从一个脉冲到下一个脉冲它们会准确地重复出现。
出现脉冲副瓣的第二个原因是系统的不稳定性,如本机振荡器噪声、发射机电源噪声、发射机时间抖动及发射管噪声。
这些副瓣具有类噪声性质,并且与杂波幅度成正比。
例如,假设具有类噪声性质的副瓣分量比峰值发射信号低40dB。
类噪声性质的分量并不能在MTI系统中被对消,因此对每一个超过系统门限40dB 或更多一些的杂波区域来说,其剩余的部分就会超过检测门限。
如果杂波超过门限60dB,则MTI系统的剩余输出就要超过检测门限20dB,于是就使MTI失效。
图15.50(b)表示了这种影响。
雷达手册·582·图15.50 有MTI的脉冲压缩:(a)理想但难于实现的组合;(b)振荡器对发射机不稳定的影响。
在系统和杂波不稳定性所强加的限制的范围内,已经有一种方法很成功地使MTI系统的性能达到最佳,如图15.51所示(在以下的讨论中,发射机噪声用来代表所有可能引起类噪声脉冲压缩时间副瓣的系统不稳定性)。
图15.51 实际的MTI脉冲压缩组合限幅器1调整到使其输出端动态范围等于发射机峰值功率与在系统带宽内的发射机噪声之间的范围。
限幅器2调整到使其输出端动态范围等于所期望的MTI改善因子。
通过设置这两个限幅器可使发射机噪声和其他不稳定因素(如量化噪声和杂波的内部运动)所引发的杂波剩余分别与对消器输出的前端热噪声相等。