步进电机驱动芯片选型指南
挑选合适的步进电机和驱动器

说到形状,有人说圆形的电机无力,方形的有力。我觉得这种说法并不完全
是正确的。它是需要加一些限制条件的。在我接触的电机中,一般较早的东方电机使用圆形的较多,那时受永磁材料的限制,确实电机扭矩比较小。后来东方的电机基本就采用方形的了,技术进步后差不多尺寸的电机方的明显比圆的高。不过这也是对一家而言。我见过美国太平洋的110步进电机,其扭矩达到了20Nm不过它的形状也是圆的,还有三洋比较新的步进电机也有圆形的,其扭矩一点不比方的小。所以看扭矩主要还是要能判断出其大概的年份,越新的相同尺寸其扭矩也就会越大。
国内生产步进电机和驱动器的厂家太多了,本人了解得有限,先介绍这些吧,欢迎大家补充!
2、日本篇
小日本很可恶,不过其二手东西就和他的av产品一样在国内广受欢迎!!
东方、三洋这两家是二手市场出镜率相当高的企业。其中又以它们的步进电机产品为最。至于驱动器,这两家应该都不错,不过价格低的往往是其古老而又久远的产品,新点的驱动器往往价格很高,特别是两相驱动器,新的一是少,二是贵。以至于这一年多我没接触过这两家新点的两相驱动器,连个型号都没有影响,不过五相的驱动器还是有些接触的。那就说说这两家的电机吧。之前说过了,东方的电机一般方的比圆的新,其扭矩也大点。网上有很多东方的步进电机,价格我觉得也不算贵,57的一般在20-50元之间86的一般在80-250元之间。感觉57电机还是很实惠的,如果机器不大的话76-86长的57或60电机足够了,买不到这两家的驱动器,买个好点的国产驱动器,这样配套效果也相当不错。至于五相电机,情况相对于两相的恰恰相反。网上大量驱动器,价格有的也不高200-300就能搞定。不过电机的价格贵得有点离谱,57的都在50以上,长点的更是过百,86的就更别说了,都说五相步进高,我觉得现在高就高在电机价格上,其驱动器往往还比两相的便宜点呢:)
步进电机选型手册

负载稳定性:考虑负载的稳定性对电机性能的影响
运动特性
步进电机的精度与步距角成正比
步进电机的转速与脉冲频率成正比
步进电机的转矩与电流成正比
步进电机的响应速度与驱动电路有关
环境条件
温度:需要考虑电机的工作温度范围,以及环境温度对电机性能的影响
湿度:需要考虑电机的工作湿度范围,以及环境湿度对电机性能的影响
步进电机的特点:精确定位、易于控制、响应速度快
步进电机的应用:广泛应用于自动化设备、机器人、数控机床等领域
步进电机的分类
按照控制方式分类:开环控制、闭环控制、半闭环控制
按照驱动方式分类:直流驱动、交流驱动、混合驱动
按照结构分类:永磁式、混合式、感应式
按照步距角分类:整步、半步、微步、超微步
步进电机的性能参数
感谢您的观看
汇报人:
噪音:步进电机的噪音越小,工作环境越安静
控制方式:选择合适的控制方式,如开环控制、闭环控制等
驱动器:选择合适的驱动器,如直流驱动器、交流驱动器等
步进电机品牌与型号推荐
国际品牌推荐
德国西门子:SINAMICS系列步进电机,性能稳定,质量可靠
美国罗克韦尔:PowerFlex系列步进电机,性能优异,价格适中
步距角:电机每转一圈的步数
效率:电机输出的能量与输入的能量的比值
响应时间:电机从静止到启动的时间
转速:电机每分钟的转数
精度:电机定位的精确度
扭矩:电机输出的力矩
步进电机选型要点
负载特性
负载类型:恒定负载、周期性负载、冲击性负载等
负载大小:根据实际需求选择合适的电机功率
负载频率:根据电机的转速和转矩特性选择合适的负载频率
海拔:需要考虑电机的工作海拔范围,以及海拔对电机性能的影响
主流步进驱动IC选型指南

主流步进驱动IC选型指南特点点评:1. TB6600作为东芝最新的大功率驱动IC,拥有最大50V@5A驱动能力,最高16细分,适用于部分86及全系列57步进电机,芯片自带欠压、过流、短路保护,而且自带5V逻辑电源,和LV8727并列为目前最高性价比的大功率驱动IC。
2. TB6560AHQ无疑是目前应用最多最广泛的步进驱动IC,适用于57及以下步进电机,由于出货量大所以价格便宜,且现货充足。
3. TB62209是最成熟的表贴式步进驱动IC之一,也曾经是性价比最高的42系列步进驱动芯片,但正逐渐被LV8731所取代。
4. LV8726是三洋针对于大中华区特别设计的一款驱动IC,电压高达60V,因为是外接Mosfet所以电流可以达到10A,最大128细分,且具有目前所有主流驱动IC的功能,目前还在内部测试中,预计今年下半年可以面市。
5. LV8727是三洋已经批量供货的最大功率驱动IC,前身是三洋给国内某公司定制的THB8128,三洋被安森美收购后将此IC做了工艺升级并小幅改善了封装方式,拥有最大********驱动能力,虽然稍逊于东芝的TB6600,但此IC细分数高达128,除了常用的保护功能外,还带有自动半流功能,价格也与TB6600相当,因此和TB6600并列为最高性价比大功率驱动IC。
6. LV8729是目前性价比最高的高细分表贴驱动IC,前身是三洋给国内某公司定制的THB6128,三洋被安森美收购后同样将此IC做了工艺升级,且大幅改善了封装和管脚排列方式,适用于部分57、全系列42及以下电机。
7. LV8731是三洋推出的非常成功的一款马达驱动IC,被誉为同级别中最高性价比,原本三洋的策略是剑指东芝的TB62209,但经过测试我们发现参数和驱动能力完全超越后者,已经和Allegro最成熟的A3977同一水准,且凭借新的工艺、多重保护以及自带逻辑5V,使得A3977也只能望尘莫及。
因此在2A以内电流的应用中,如果没有高细分的要求,LV8731是最好的选择。
电机驱动芯片选型-步进电机和BLDC-Allegro

厂家型号描述Allegro A3901Dual Full Bridge Low Voltage Motor DriverAllegro A3916Dual DMOS Full-Bridge Motor DriverAllegro A3966Dual Full-Bridge PWM Motor DriverAllegro A3967Microstepping Driver with TranslatorAllegro A3977Microstepping DMOS Driver with TranslatorAllegro A3979Microstepping DMOS Driver with TranslatorAllegro A3981K Automotive, Programmable Stepper DriverAllegro A3982DMOS Stepper Motor Driver with TranslatorAllegro A3983DMOS Microstepping Driver with TranslatorAllegro A3984DMOS Microstepping Driver with TranslatorAllegro A3985Digitally Programmable Dual Full-Bridge MOSFET DriverAllegro A3987DMOS Microstepping Driver with TranslatorAllegro A3988Quad DMOS Full Bridge PWM Motor DriverAllegro A3989Bipolar Stepper and High Current DC Motor DriverAllegro A3992DMOS Dual Full-Bridge Microstepping PWM Motor DriverAllegro A3995DMOS Dual Full Bridge PWM Motor DriverAllegro A3998Dual DMOS Full Bridge Motor Driver With Serial Port Control and Allegro A4970Dual Full-Bridge PWM Motor DriverAllegro A4975Full-Bridge PWM Microstepping Motor DriverAllegro A4979Microstepping Programmable Stepper Motor Driver With Stall Dete Allegro A4980K Automotive, Programmable Stepper DriverAllegro A4982DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A4983DMOS Microstepping Driver with TranslatorAllegro A4984DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A4985DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A4986DMOS Dual Full-Bridge PWM Motor Driver With Overcurrent Protect Allegro A4987DMOS Dual Full-Bridge PWM Motor Driver with Overcurrent Protect Allegro A4988DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A4989Dual Full-Bridge MOSFET Driver with Microstepping Translator Allegro A4990K Automotive Dual Full Bridge DriveAllegro A4992K Automotive Stepper DriverAllegro A4993Automotive Stepper Motor DriverAllegro A5976Microstepping DMOS Driver with TranslatorAllegro A5977Microstepping DMOS Driver with TranslatorAllegro A5979Microstepping DMOS Driver with TranslatorAllegro A5984DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A5985DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A5988Bipolar Stepper and High-Current DC Motor DriverAllegro A5989Bipolar Stepper and High-Current DC Motor DriverAllegro A5990Quad DMOS Full-Bridge PWM Motor DriverAllegro AMT49701Quad DMOS Full-Bridge PWM Motor DriverAllegro AMT49702Dual DMOS Full-Bridge Motor Driver后缀“K”表示汽车级产品(通过 AEC-Q100 认证)下列器件已停产:A3986, A3972电桥数量峰值输出电流最大电源电压接口位置反馈最小电源电压Parallel External 2.5 5.50.4Full-Bridge x2 Parallel External 2.7151Full-Bridge x2 PH/EN External 4.75300.75Full-Bridge x2 Translator (Step/DIR)External 4.75300.85Full-Bridge x2 Translator (Step/DIR)External835 2.5Full-Bridge x2 Translator (Step/DIR)External835 2.5Full-Bridge x2 SPI,Translator (Step/DIR)External732 1.4Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 SPI External1250Full-Bridge x2 Translator (Step/DIR)External850 1.5Full-Bridge x2 Parallel External836 1.2Full-Bridge x4 Parallel,PH/EN External836 1.2Full-Bridge x4 SPI External1550 1.5Full-Bridge x2 PH/EN External836 2.4Full-Bridge x4 SPI External950 1.5Full-Bridge x2 Parallel External7.45451Full-Bridge x2 Parallel External550 1.5Full-Bridge x1 SPI,Translator (Step/DIR)External750 1.5Full-Bridge x2 SPI,Translator (Step/DIR)External 3.332 1.4Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External835 2.5Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External8351Full-Bridge x2 Parallel External8352Full-Bridge x2 Parallel External8351Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External1250 1.2Full-Bridge x2 Parallel External632 1.4Full-Bridge x2 SPI,Translator (Step/DIR)External 3.832 1.4Full-Bridge x2 SPI,Translator (Step/DIR)Open Loop 3.532 1.4Full-Bridge x2 Translator (Step/DIR)External840 2.8Full-Bridge x2 Translator (Step/DIR)External840 2.8Full-Bridge x2 Translator (Step/DIR)External840 2.8Full-Bridge x2 Translator (Step/DIR)External8402Full-Bridge x2 Translator (Step/DIR)External8402Full-Bridge x2 Parallel External840 1.6Full-Bridge x4 Parallel External840 1.6Full-Bridge x4 Parallel External840 1.6Full-Bridge x4 Parallel External4181Full-Bridge x4 Parallel External 3.5151Full-Bridge x2封装DFN Consumer,Industrial QFN Consumer,Industrial SOIC Consumer,Industrial SOIC Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial TSSOP AutomotiveSOIC Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial QFN,LQFP Consumer,Industrial QFN Consumer,Industrial DIP,TSSOP Consumer,Industrial QFN Consumer,Industrial QFN Consumer,Industrial SOIC Consumer,Industrial DIP,SOIC Consumer,Industrial TSSOP Consumer,Industrial TSSOP AutomotiveQFN,TSSOP Consumer,Industrial QFN Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN Consumer,Industrial TSSOP Consumer,Industrial TSSOP AutomotiveTSSOP AutomotiveTSSOP AutomotiveTSSOP Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN Consumer,Industrial QFN Consumer,Industrial QFN Consumer,Industrial QFN Consumer,Industrial,Of QFN Consumer,Industrial TSSOP AutomotiveFull, Half Step Resolution, Single Supply, Sleep ModeInternal PWM Current Control, Single Supply, OCP Protection, Fault Output, Sleep Mode, Parallel Ope Internal PWM Current Control, Full, Step Resolution, Sleep ModeInternal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, Sleep Mode, Automatic Mixed Dec Internal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, Sleep Mode, Automatic Mixed Dec Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Sleep Mode, Automatic Mixed De Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Programable Fa Internal PWM Current Control, Full, Half Step Resolution, Sleep Mode, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, Sleep Mode, Automatic Mixed Dec Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Sleep Mode, Automatic Mixed De Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Sleep Mode, Mixed Decay Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Sleep Mode, Au Internal PWM Current Control, Full, Half, 1/4 Step Resolution, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4 Step Resolution, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Sleep Mode, Mi Internal PWM Current Control, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, OCP Protection, Sleep Mode, 3.3 Internal PWM Current Control, Full, Half Step Resolution, Sleep ModeInternal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Programable Fa Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Programable Fa Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Sleep Mode, Au Internal PWM Current Control, Full, Half, 1/4, 1/8, 1/16 Step Resolution, Sleep Mode, Automatic Mix Internal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, OCP Protection, Sleep Mode, Aut Internal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, OCP Protection, Sleep Mode, Aut Internal PWM Current Control, Full, Half, 1/4 Step Resolution, OCP Protection, Sleep Mode, Mixed De Internal PWM Current Control, Full, Half, 1/4 Step Resolution, OCP Protection, Sleep Mode, Mixed De Internal PWM Current Control, Full, Half, 1/4, 1/8, 1/16 Step Resolution, OCP Protection, Sleep Mod Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Sleep Mode, Mixed Decay Internal PWM Current Control, Full Step Resolution, Single Supply, Sleep ModeInternal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Single Supply, OCP Protection, Integrated Current Sense, Internal PWM Current Control, 50V Transient compatible, Full, Half, 1/4, Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Fault Output, Internal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, OCP Protection, Sleep Mode, Aut Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Sleep Mode, Au Internal PWM Current Control, Full, Half, 1/4, 1/8, 1/16, 1/32 Step Resolution, Single Supply, OCP Internal PWM Current Control, Full, Half, 1/4, 1/8, 1/16, 1/32 Step Resolution, Single Supply, OCP Internal PWM Current Control, Full, Half, 1/4 Step Resolution, Single Supply, OCP Protection, Sleep Internal PWM Current Control, Full, Half, 1/4 Step Resolution, Single Supply, OCP Protection, Sleep Adaptive Percent fast decay, Adjustable off time, Internal PWM Current Control, Full, Half, 1/4 Ste Internal PWM Current Control, Full, Half, 1/4 Step Resolution, Single Supply, OCP Protection, Sleep Internal PWM Current Control, Half step resolution, Single Supply, OCP Protection, Fault Output, SlParallel OperationAutomatic Mixed DecayAutomatic Mixed Decay, Automatic Mixed Decaytion, Programable Fault Output, Sleep Mode, Advanced DiagnosticsMixed DecayAutomatic Mixed Decay, Automatic Mixed Decay, Mixed Decaytion, Sleep Mode, Automatic Mixed Decaytion, Sleep Mode, Mixed Decayion, Sleep Mode, 3.3/5.0V LDO, Mixed Decayixed Decaytion, Programable Fault Output, Sleep Mode, Advanced Diagnosticstion, Programable Fault Output, Sleep Mode, Advanced Diagnosticstion, Sleep Mode, Automatic Mixed DecayMode, Automatic Mixed Decayion, Sleep Mode, Automatic Mixed Decayion, Sleep Mode, Automatic Mixed DecaySleep Mode, Mixed DecaySleep Mode, Mixed Decayrotection, Sleep Mode, Automatic Mixed Decay, Mixed Decayply, OCP Protection, Programmable Fault Output, Sleep Mode, Mixed Decaye, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Programable Fault Output, Sleep Mode, Advanced Dia tion, Fault Output, Sleep Mode, Automatic Mixed Decayion, Sleep Mode, Automatic Mixed Decaytion, Sleep Mode, Automatic Mixed DecaySingle Supply, OCP Protection, Fault Output, Sleep Mode, Adaptive Percent Fast DecaySingle Supply, OCP Protection, Fault Output, Sleep Mode, Adaptive Percent Fast DecayCP Protection, Sleep Mode, Mixed DecayCP Protection, Sleep Mode, Mixed DecayFull, Half, 1/4 Step Resolution, Single Supply, OCP Protection, Sleep Mode, Mixed Decay, diagnostic output CP Protection, Sleep Mode, Mixed Decayon, Fault Output, Sleep Modeep Mode, Advanced Diagnostic d Decay, diagnostic output。
DANAHER P7000 型微步进驱动器 选型指南

Helping you build a better machine, fasterP7000型微步进驱动器选型指南概述新形象,老品牌Danaher Motion以其丰富的运动控制系统和零部件产品,为客户提供了独一无二的解决方案甄选机会,以满足其特定的应用需求。
六十多年来,通过诸如Dover、Kollmorgen、PacificScientific、Portescap及Thomson等一直得到客户信赖的品牌,在半导体、航空和国防、非公路用机动设备、包装、医疗和机器人技术等各种领域,我们的产品创新始终不断地改善着复杂制造过程的效率和生产力。
Danaher Motion不断增长的先进运动控制产品系列只是我们优势的一部分。
通过全球服务和支持体系,我们的现场服务工程师和支持团队可以在任何需要的时候提供帮助。
这也是Danaher公司从不放弃的以客户为中心的政策的一部分。
正因为如此,越来越多的设计工程师开始使用Danaher Motion的产品,来满足他们在运动控制方面的要求。
Pacific Scientific P7000 驱动器和步进电机 – 您的不二之选源自丹纳赫传动的全新 Pacific Scientific P7000 步进驱动器和电机,性能如伺服系统,却具有步进电机解决方案的成本和简便性。
而且系统的选型亦非常简单。
成套优化的电机驱动器组合,具有各种 Pacific Scientific 标准电机系列功能。
性能更优秀P7000 驱动器拥有业界无与伦比的系统平稳性、出众功能、高速性能以及技术创新。
持续改善- Danaher 的方针在美国丹纳赫集团(Danaher Corporation),我们充满热情地持续改进我们的工作,以便为我们的客户带来持续增长的价值。
Danaher业务系统(DBS)帮助我们提高制造流程和产品开发流程的效率。
Danaher业务系统是一个基于团队的方法,该方法基于Kaizen原则,该原则让我们持续、积极消除我们业务工作中每一个方面中的浪费。
步进电机驱动器选型指南

上图表示两相,低噪声技术,50V 电压,5.6A 电流,无铅版本的步进电机驱动器。
雷赛驱动器选型列表
相数
二 相
系列 M
型号 M542 V2.0
M752
电流 (A) 1.04.2 1.26 -5.2
电压(V)
DC(24-5 0)
DC(36-7 5)
细分数
2-128, 5-125 2-256, 5-200
0.68 3
0.44
0.11 5
2 0.28
5-500 2-128,5
-125 2-50 2-128,5 -125 2-50
2-50 200-100 00步/圈
42,57,8 6
42,57
42,57,8 6
86,110, 130
86,110, 130
86,110, 130
2.47.2 1.05.0 2.57.8 2.47.2 2.47.2 0.21 -1.5 0.39 -2.5 0.25 -2.0 1.04.2 1.33.5 2-6.
0 1.47.8 0.22.2 0.33.2 0.35.6 0.35.6 1.45.6 1.88.2 0.78.2 0.45 -7.8 0.45 -7.8 2.18.3
高压 产品
3ND883 3MD2280
2.18.3 0-8.
0
DC(18-8 0)
AC(80-2 20)
200-100 00步/圈 400-100 00步/圈
42、57、 86
110、130
0.38 1.05
143*97*48
212*158.7*13 .5
差分 差分
驱动器选型要点
驱动器的电流: 电流是判断驱动器能力的大小,是选择驱动器的重要指标之一,通常驱动器的最大电流要略大于电机标称 电流,通常驱动器有2.0A、3.5A、6.0A、8.0A 等规格。
步进电机驱动器选型需要注意的参数

步进电机驱动器选型需要注意的参数
本文提供了一个步进电机驱动器选型需要注意的参数,内容如下:
步进电机驱动器的电流
电流是判断步进电机驱动器能力的大小,是选择驱动器的重要指标之一,通常驱动器的最大电流要略大于电机标称电流,通常驱动器有2.0A、3.5A、6.0A、8.0A等规格。
步进电机驱动器供电电压
供电电压是判断驱动器升速能力的标志,常规电压供给有:24VDC、40VDC、80VDC、110VAC等。
步进电机驱动器的细分
细分是控制精度的标志,通过增大细分能改善精度。
细分能增加电机平稳性,通常步进电机都有低频振动的特点,通过加大细分可以改善,使电机运行非常平稳。
控制信号接口说明
差分式接口
兴丰元步进电机驱动器采用差分式接口电路,内置高速光电耦合器,允许接收长线驱动器,集电极开路和PNP输出电路的信号,可适配各种控制器接口,包括西门子PLC。
建议用长线驱动器电路,抗干扰能力强。
单/双脉冲模式
多数兴丰元步进电机驱动器可以接收两类脉冲信号:一种为脉冲+方向形式(单脉冲);一种为正脉冲+反脉冲(双脉冲)形式。
可通过驱动器内部的跳线器进行选择。
脉冲信号:一种为脉冲+方向形式(单脉冲);一种为正脉冲+反脉冲(双脉冲)形式。
可通过驱动器内部的跳线器进行选择。
信浓步进电机STP-42D4042选型及使用指南

信浓标准42步进电机的机身长一般在40mm以内,但市场上需要更大力矩的42步进电机,STP-42D4042最初是我公司要求信浓公司定制的大力矩的42步进电机,在150~750rpm速度范围内力矩都不错,在很多行业都有选用,出货量巨大,所以出厂价相对同样尺寸的步进电机要低一些,性价比高,是值得优先选用的42步进电机型号。
其主要特性参数见下表。
STP-42D4042的距频图如下:但有些用户使用芯片电流没有2A这么大,或者为了降低电机发热量,刻意降低电流使用,下图是STP-42D4042在电流降低到1.2~1.4A时候的距频图。
降低驱动电流后电机输出力矩会降低,但不会和电流大小成线性关系,同样的,增大电流也不会线性增大步进电机力矩。
主要外形尺寸和接线图见下面:STP-42D4042轴长24mm铣扁,适合安装同步轮使用,如果配联轴器,需要轴短的电机,可以考虑STP-42DS4042-03,轴长18mm,另外还有轴长30mm的STP-42D4042-04,可以安装减震垫之后再安装同步轮,如果需要双出轴的,对应型号是STP-42D4042-01。
如果使用速度低于150rpm,建议不考虑STP-42D4042,因为在低速的时候STP-42D4042发生共振的几率会比较高,建议选用更适合跑低速的步进电机型号STP-43D3069-01。
如果电机运行速度超过750rpm而需要较大的力矩,可以考虑选用STP-43D3090,需要的话另外单独沟通详细产品信息。
信浓42D系列步进电机虽然噪声比一般厂家要低,但和信浓43D、45D等系列相比,噪声还是太大了。
43D系列就是信浓以低噪声为目标设计的系列产品,45D系列是为了低速运行平滑性好而设计的系列产品,其中最常用的是43D系列,其实都是行业所称的42步进电机,法兰尺寸通用,只是信浓为了区分不同模具用不同系列来区分。
但由于42D系列产销量大,出厂价有优势,所以很多客户也一直延续使用,但批量大的客户还是可以考虑从新机型设计开始选用43D系列的产品,毕竟长期看43D系列更有优势。
步进电机选型指导

步进电机选型指导由于步进电机及驱动器型号较多、种类较多,用户在选择时应有一定的讲究,这样才能以最优的性能、最低的价格选择好自己所需的产品。
选取原则(仅供参考):1.首先确定步进电机拖动负载所需要的扭矩。
最简单的方法是在负载轴上加一杠杆,用弹簧秤拉动杠杆,拉力乘以力臂长度既是负载力矩。
或者根据负载特性从理论上计算出来。
由于步进电机是控制类电机,所以目前常用步进电机的最大力矩不超过45N.m,力矩越大,成本越高,如果您所选择的电机力矩较大或超过此范围,可以考虑加配减速装置。
2.确定步进电机的最高运行转速。
电机和驱动器选购转速指标在步进电机的选取时至关重要,步进电机的特性是随着电机转速的升高,扭矩下降,其下降的快慢和很多参数有关,如:驱动器的驱动电压、电机的相电流、电机的相电感、电机大小等等,一般的规律是:驱动电压越高,力矩下降越慢;电机的相电流越大,力矩下降越慢。
在设计方案时,应使电机的转速控制在600转/分或800转/分以内,当然这样说很不规范,可以参考〈矩-频特性〉。
3.根据负载最大力矩和最高转速这两个重要指标,再参考〈矩-频特性〉,就可以选择出适合自己的步进电机。
如果您认为自己选出的电机太大,可以考虑加配减速装置,这样可以节约成本,也可以使您的设计更灵活。
要选择好合适的减速比,要综合考虑力矩和速度的关系,选择出最佳方案。
4.最后还要考虑留有一定的(如50%)力矩余量和转速余量。
5.可以先选择混合式步进电机,如果由于价格因素,可以选取反应式步进电机。
6.尽量选取细分驱动器,且使驱动器工作在细分状态。
7.选取时且勿走入只看电机力矩这一个指标的误区,也就是说并非电机的扭矩越大越好,要和速度指标一起考虑。
8.超小型驱动器和微型驱动器是靠外壳作为散热器的,应固定在较大、较厚的金属板上或外加风机散热,如果没有散热条件,而驱动器又工作在转速较低的场合(这时驱动器发热较大),可以选用带风机的大型驱动器代替。
要使系统协调运转,电机选型是比较重要的一环。
Allegro步进电机驱动IC选型指南
A4982 A4983
8.0 至 35 8.0 至 35
2.0 安培 2.0 A
并行(转换器) 并行(转换器)
A4984
8.0 至 35
2.0 安培
并行(转换器)
A4985
A4988 A3980K A3981K A3986 A4980K A4989
型号
A3972 A3981K A3992 A4980K A3985
串行接口
输出电流范围 1.5 安培 1 安培 1.5 安培 1 安培
2 安培至 10 安培 (典型)
并行(转换器)
并行(转换器) 并行(转换器)
并行/SPI 并行(转换器)
并行/SPI 并行(转换器)
接口 串行 并行/SPI 串行 并行/SPI 串行
封装 DFN-10 QFN-20 SOIC-16
A3906SES
接口
750 毫安
并行(转换器)
A3977
8.0 至 35
2.5 安培
并行(转换器)
A3979 A3982 A3983 A3984
A3987
8.0 至 35 8.0 至 35 8.0 至 35 8.0 至 35
8.0 至 35
2.5 A 1.5 安培 1.5 安培 1.5 安培
1.5 安培
并行 (转换器) 并行(转换器) 并行(转换器) 并行 (转换器)
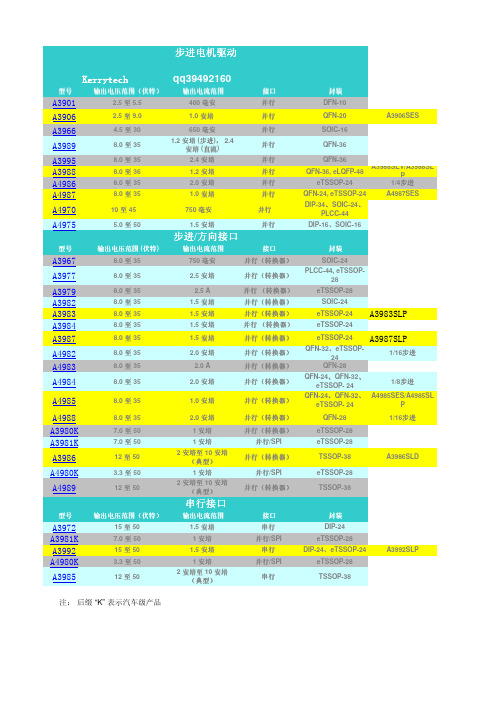
步进电机驱动kerrytech型号输出电压范围输出电压范围伏特伏特25455050qq39492160输出电流范围400毫安10安培接口并行并行封装dfn10a3906sesa3901a3906a3966a3988a4986a4987型号输出电压范围伏特8050a3977a3979a3982a3983a3987a4982a4983a4985a4988a3980ka3981ka4989型号650毫安并行12安培步进24并行安培直流24安培并行12安培并行20安培并行10安培并行750毫安并行15安培并行步进方向接口输出电流范围接口750毫安并行并行转换器转换器25安培25a15安培15安培15安培15安培20安培20a20安培10培20安培1安培1安培2安培至10安培典型典型安培2安培至10安培典型典型并行并行转换器转换器并行转换器转换器并行并行转换器转换器并行并行转换器转换器并行转换器转换器qfn20soic16qfn36qfn36qfn36elqfp48etssop24qfn24etssop24dip34soic24plcc44dip16soic16a3988seva3988sl14步进a4987ses封装soic24plcc44etssop28etssop28soic24etssop24etssop24etssop24qfn32etssop24qfn28qfn24qfn32etssop24a3983slpa3987slp116步进并行并行转换器转换器并行并行转换器转换器并行并行转换器转换器并行并行转换器转换器转换器并行并行转换并行并行转换器转换器并行并行转换器转换器并行spi行并行转换器转换器并行spi并行并行转换器转换器18步进qfn24qfn32a4985sesa4985sletssop24pqfn28etssop28etssop28tssop38etssop28tssop38a3986sld116步进串行接口输出电压范围输出电压范围伏特伏特1550输出电流范围15安培1安培15安培1安培2安培至10安培典型典型接口串行并行spi串行并行spi串行封装dip24a3992slpa3972a3981ka3992a4980ka3985etssop28dip24etssop24etssop28tssop38
步进电机选型说明书

Q2HBL860A\B驱动器
Q2HBL860A细分设定表
细分数 SW6 SW5 SW4 SW3
SW2
SW1
1 2 4 5 8 10 20 25 40 50 100 200 200 200 200 200 ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON ON OFF OFF ON ON OFF OFF ON ON OFF OFF ON ON OFF OFF ON ON ON ON OFF OFF OFF OFF ON ON ON ON OFF OFF OFF OFF ON ON ON ON ON ON ON ON OFF OFF OFF OFF OFF OFF OFF OFF ON,双脉冲:PU 为正向步进脉冲信号,DR 为反向步进脉冲信号 OFF,单脉冲:PU 为步进脉冲信号,DR 为方向控制信号 自检测开关(OFF 时接收外部脉冲,ON 时驱动器内部发 7.5kHz 脉冲)
(ο) (mm) (N. m) (No.)
LL57HB41
1.8°
41
0.4
6
LL57HB51
1.8°
51
0.72
6
LL57HB56
1.8°
56
0.9
6
LL57HB76
1.8°
76
1.4
6
LL57HB80
1.8°
78.5
1.8
6
以上仅为代表性产品,可按要求另行制作。
Current Resistance
型号
步距角 机身长 静力力矩 引线数 电流 电阻
电感 转动惯量 轴径 重量
Series
Step Motor Holding Lead
步进电机选型指导

使用注意事项
步进电机属于精密机械,如果不小心运输和使用,有可能降低机器的精度,甚至有可能损坏电机。在与皮带轮、联轴 器和齿轮等安装时,要确保安装牢固,并在正式运转前进行暖机运转。
●安装平面
电机可自由的朝上、朝下或是横向安装。请在耐振性佳、热传导效果好的平滑金属板上安装步进电机。电机安装 平面上有安装凸台用于安装定位,此凸台的公差为 h8。 ●电机出轴
3、根据机械传动要求,确定运转模式 也即根据机械移动,定位和时间要求来确定步进电机运转的速度,角度和加减速曲线。
3.1 计算运转脉冲数 脉冲数 = 要求 的位移量 × 电机转一圈的位移量
360° 步距角
3.2 确定运行曲线和计算脉冲频率 一般来说运行曲线使用矩形和梯形两种。 ☆矩形曲线 电机直接以运行频率启动,运转到位后直接停止。这种运转方式需要非常大的加速扭矩。 脉冲频率 = 运转脉冲数 定位时间 ☆梯形曲线 电机由较低的频率启动,加速到要求速度,运行一定时间后要求再减速然后停止。这样速度变化较为缓慢,对加 速扭矩要求可适当降低。通常加减速度时间设定为定位时间的 25% 左右。根据实际情况确定启动频率,启动时间(也 可以考虑在多少个脉冲数后加速到运行频率)
6、选定型号后,需再确认一下惯量比
惯量比 = 机械结构的全惯量 电机转子的惯量
步 进
如果惯量比过大,则启动停止时的过冲和回冲会变大,从而影响启动和整定的时间,也可能出现无法启动的现象。
电 机
惯量比超出以下参考值时,建议选用大一号的电机或者另加齿轮减速箱。惯量比参考值:20、28、35 电机建议 5 以下:
附有电磁刹车的电机在断电时电磁刹车会保持电机停止的位置,但切勿将电磁刹车用于电机制动和安全刹车。
矩形驱动时加速转矩nmjojlsf236180s梯形驱动时加速转矩nmjojls180f2f1t1jo转子惯量kgm2jl全负载惯量kgm2s马达步距角f2运转脉冲速度hzf1启动脉冲速度hzf矩形驱动时的运转脉冲速度hzt1加减速时间sstep43计算需要转矩需要转矩负载转矩加速转矩安全系数安全系数通常设置为1520倍
【专业】步进电机怎么样选型?步进电机选型要注意哪些方面?步进电机选型指南

【专业】步进电机怎么样选型?步进电机选型要注意哪些方面?步进电机选型指南步进电机是比较特殊的电机产品,不是很有经验的工程师往往不知道怎么样选到合适的步进电机,那么到底应该怎样选到合适的步进电机?也有人觉得步进电机振动噪声大,不知道怎么样改善,下面步进电机服务品牌维科特机电来给大家简单介绍一下。
步进电机不需要带反馈就可以精确控制电机的运行位置和速度,对于工程师来讲是一种便宜好用的运动控制的动力单元。
步进电机其实是一种特殊的直流无刷电机,需要驱动器来电子换相。
相对于其他电机产品,步进电机可以不带减速箱的情况下低速大力矩运行。
步进电机的一般建议工作速度范围是90~900rpm,速度太低的时候容易共振,速度高了力矩衰减得太厉害,带不了多大的负载。
但不是说任何一款步进电机都适合在90~900rpm的转速范围内工作,需要根据电机的实际工作情况来选择合适的法兰尺寸、机身厚度和特性参数。
法兰尺寸大、机身长度大的电机力矩大,低速应用场合适合选电感大的电机,高速应用场合适合选电感小的电机。
具体的选型可以按照下面的流程来选择:1.确定步进电机的工作速度区间和工作力矩。
确定步进电机的工作速度区间和工作力矩之后,再参考步进电机的距频图,选择能够满足对应工作速度下力矩的步进电机,需要留合理的安全余量,因为负载一旦超过步进电机工作力矩就失步了,不能够正常工作了。
2.确定步进电机外形尺寸方面的要求或者限制条件。
尽量选市面上最常用的尺寸的步进电机的性价比比较高,42和57法兰尺寸的步进步电机系统解决方案电机最常用,应该最优先考虑,尺寸更小的或者尺寸更大的成本都会更高。
除了力矩之外,尽可能考虑负载的转动惯量不要低于电机的转动惯量的10倍。
通常机身尺寸大的步进电机的转动惯量也大,但也和步进电机的内部结构有关。
3.确定合适的工作电压。
42和57步进电机一般工作电压是DC24V,如果速度比较高,就要考虑更高的驱动电压,法兰尺寸比较大的步进电机的工作电压也要适当提高。
步进电机选型指南-步进电机驱动器-步进电机控制器

步进电机选型指南/步进电机驱动器/步进电机控制器一、步进电机选用指南:1、怎么确定步进电机的型号,要注意那几个主要参数?混合式步进电机中的静力矩,引线数,电感等参数如何理解?一般是根据您的负载选电机,主要是参考步进电机的力矩,详细的还涉及到电机的转速和额定电流,传动机构等,起动的转速和正常运行的转速,另外还有电机的精度。
2、步进电机选型注意事项a、步进电机应用于低速场合-----每分钟转速不超过1000转,(0.9度时6666PPS),最好在1000-3000PPS(0.9度)间使用,可通过减速装置使其在此间工作,此时电机工作效率高,噪音低。
b、步进电机最好不使用整步状态,整步状态时振动大。
c、除了标称为12V电压的电机使用12V外,其他电机可根据驱动器选择驱动电压(建议:57BYG采用直流24V-36V,86BYG采用直流46V,110BYG采用高于直流80V)。
当然,12伏电压的电机也可以采用其他驱动电源,不过要考虑温升。
d、转动惯量大的负载应选择机座号较大的电机。
e、工作转速较高的电机在带动大惯量负载时,一般不要在工作转速下起动,而应该采用逐渐升频提速,这样一来电机不会失步,二来可以减少噪音,还可以提高停转时的定位精度。
f、精度要求高时,应通过采用机械减速、提高电机速度以及选用高细分数的驱动器来解决。
电机不应在振动区内工作,如若必须可通过改变电压、电流或增加阻尼的方法解决。
g、电机工作在600PPS(0.9度)以下,应选择小电流、大电感、低电压的驱动器。
h、应遵循先选电机后选驱动器的原则。
3、步进电机原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速和停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性误差而无累积误差的特点,使得其控制速度和位置非常简单。
步进电机选型方法
步进电机选型方法步进电机简介及选型方法如何选择合适的步进电机1. 负载分类:(1)Tf力矩负载:Tf = GrG 重物重量r 半径(2)TJ惯性负载:J = M(R12+R22)/ 32 (Kgcm)M:质量R1:外径R2:内径TJ = Jdw/dt dw/dt 为角加速度2.力矩曲线图的说明力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
步进电机简介及选型方法说明:1. 工作频率点:表示步进电机在该点的转速值。
单位:Hzn=Θ*Hz / (360*D)n 转/秒Hz 该点的频率值D 电路的细分值,Θ步进电机的步距角例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是1.25转/秒2. 起动区域:步进电机可以直接起动或停止的区域。
3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。
同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。
4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。
5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。
6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。
7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。
由于运动惯性的原因,所以,运行力矩要比起动力矩大。
3 加速和减速运动的控制当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。
如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
步进电机简介及选型方法(1)直线加速运动已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和加速脉频率F(t)A.确定TJ,一般TJ =70% Tm。
步进电机及驱动器选型须知

步进电机及驱动器选型须知1、选择保持转矩(HOLDING TORQUE)保持转矩也叫静力矩,是指步进电机通电但没有转动时,定子锁住转子的力矩。
由于步进电机低速运转时的力矩接近保持转矩,而步进电机的力矩随着速度的增大而快速衰减,输出功率也随速度的增大而变化,所以说保持转矩是衡量步进电机负载能力最重要的参数之一。
比方,一般不加说明地讲到1N.m的步进电机,可以理解为保持转矩是1N.m。
2、选择相数两相步进电机成本低,步距角最少1.8 度,低速时的震动较大,高速时力矩下降快,适用于高速且对精度和平稳性要求不高的场合;三相步进电机步距角最少1.5度,振动比两相步进电机小,低速性能好于两相步进电机,最高速度比两相步进电机高百分之30至50,适用于高速且对精度和平稳性要求较高的场合;5相步进电机步距角更小,低速性能好于3相步进电机,但成本偏高,适用于中低速段且对精度和平稳性要求较高的场合。
3、选择步进电机应遵循先选电机后选驱动器原则,先明确负载特性,再通过比较不同型号步进电机的静力矩和矩频曲线,找到与负载特性最匹配的步进电机;精度要求高时,应采用机械减速装置,以使电机工作在效率最高、噪音最低的状态;防止使电机工作在振动区,如若必须则通过改变电压、电流或增加阻尼的方法解决;电源电压方面,建议57电机采用直流24V-36V、86电机采用直流46V、110电机采用高于直流80V;大转动惯量负载应选择机座号较大的电机;大惯量负载、工作转速较高时,电机而应采用逐渐升频提速,以防止电机失步、减少噪音、提高停转时的定位精度;鉴于步进电机力矩一般在40Nm以下,超出此力矩范围,且运转速度大于1000RPM时,即应考虑选择伺服电机,一般交流伺服电机可正常运转于3000RPM,直流伺服电机可可正常运转于10000RPM。
4、选择驱动器和细分数最好不选择整步状态,因为整步状态时振动较大;尽量选择小电流、大电感、低电压的驱动器;配用大于工作电流的驱动器、在需要低振动或高精度时配用细分型驱动器、对于大转矩电机配用高电压型驱动器,以获得良好的高速性能;在电机实际使用转速通常较高且对精度和平稳性要求不高的场合,不必选择高细分数驱动器,以便节约成本;在电机实际使用转速通常很低的条件下,应选用较大细分数,以确保运转平滑,减少振动和噪音;总之,在选择细分数时,应综合考虑电机的实际运转速度、负载力矩范围、减速器设置情况、精度要求、振动和噪音要求等。
步进电机驱动器的型号该如何选择

步进电机驱动器的转速与脉冲信号的频率成正比,操控步进脉冲信号的频率,能够对电机准确调速;操控步进脉冲的个数,能够对电机准确定位。
因而典型的步进电机驱动器操控系统首要由三部分组成:
1、步进操控器:人机接口、运动规划、I/O操控。
2、驱动器:脉冲分配、电流扩大。
3、步进电机:驱动负载。
步进电机驱动器的选型攻略是怎么样的呢?
驱动器的细分:步进电机驱动器的作业形式有整步、半步、细分,首要差异在于电机线圈电流的操控精度。
一般步进电机都有低频振荡的特点,通过细分设置能够改进电机低速运转的平稳性。
驱动器的供电电压:驱动器的输入电压的凹凸决议电机的高速功能。
供电电压越高,电机高速时力矩越大,越能防止高速进失步。
但电压过高会导致驱动器过压维护,电机发热较多,可能导致驱动器损坏。
在高压下作业时,电机低速运动的振荡会大一些。
驱动器的电流:电流是判别驱动器驱动能力巨细的根据,一般驱动器最大额定电流不能大于电机的额定电流。
驱动器输出电流设定决议电机的力矩,电流设定值越大时,电机输出力矩越大,但电流设定过大时电机和驱动器的发热也比较严重。
一般的设定方法选用步进电机额定电流值作为参阅、但实践使用中的最佳值应在些基础上调整。
步进电机驱动芯片选型指南
步进电机及驱动芯片选型指南1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
42步进电机选型说明

◆步进电机详细信息Array
◆步进电机性能参数
注:1. 以上仅为代表性产品,如需其它非代表性产品可以根据客户需求定制。
2。
根据客户不同需求可以定制4线,6线,8线步进电机
3。
两相步进电机基本步距角是1。
8°,三相步进电机步距角是1。
2°。
◆步进电机安装尺寸(单位:mm)
42 FH系列步进电机标准出轴为光轴,直径5mm,伸出轴长度21mm。
可按用户要求铣单扁、做双出轴、变更出轴长度;也可按用户要求定制电气参数,例如电流大小;或根据用户使用环境做参数调整,例如供电电压12V要求低速平稳;还可按用户提供样品仿制步进电机。
◆步进电机曲线图说明
◆步进电机接线图说明
注意:
◆电机特性数据和技术数据都是在匹配我公司驱动器驱动YBM86的情况下测得,测试电压为DC28V。
◆步进电机力矩测试数据与驱动器型号、参数设置、驱动器供电电压密切相关;同规格步进电机因定转子间隙不同,饶线方式不同,其矩频特性也不同。
◆电机安装前务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度,不同心会导致断轴。
◆电机与负载连接时,严禁敲击,电机轴与轴承受敲击后可能影响电机性能,甚至损坏。
◆电机与驱动器连接时,请勿接错相,错相或缺相时电机不能正常运转,可能损伤步进电机驱动器。
◆无电机接线图时,用万用表测量,电机线两两相通,分别接A+A—、B+B-。
无万用表时,挑两根电机线短接,若电机轴旋转阻力增大,则这两根线是一组线圈。
电机旋转初始方向与所需方向相反时,把A+A-两线换位即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
一般为两相或四相;输出转矩小(消耗功率较小,电流一般小于2A,驱动电压12V);步距角大(例如7.5度、15度、22.5度等);断电时具有一定的保持转矩;启动和运行频率较低。
(3)混合式步进电机:也叫永磁反应式、永磁感应式步进电机,混合了永磁式和反应式的优点。
其定子和四相反应式步进电机没有区别(但同一相的两个磁极相对,且两个磁极上绕组产生的N、S极性必须相同),转子结构较为复杂(转子内部为圆柱形永磁铁,两端外套软磁材料,周边有小齿和槽)。
一般为两相或四相;须供给正负脉冲信号;输出转矩较永磁式大(消耗功率相对较小);步距角较永磁式小(一般为1.8度);断电时无定位转矩;启动和运行频率较高;是目前发展较快的一种步进电机。
6、步进电机按工作方式分类:可分为功率式和伺服式两种。
(1)功率式:输出转矩较大,能直接带动较大负载(一般使用反应式、混合式步进电机)。
(2)伺服式:输出转矩较小,只能带动较小负载(一般使用永磁式、混合式步进电机)。
7、步进电机的选择:(1)首先选择类型,其次是具体的品种与型号。
(2)反应式、永磁式和混合式三种步进电机的性能指标、外形尺寸、安装方法、脉冲电源种类和控制电路等都不同,价格差异也很大,选择时应综合考虑。
(3)具有控制集成电路的步进电机应优先考虑。
8、步进电机的基本参数:(1)电机固有步距角:它表示控制系统每发一个步进脉冲信号,电机所转动的角度。
电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为…电机固有步距角‟,它不一定是电机工作时的实际步距角,实际步距角和驱动器有关。
(2)步进电机的相数:是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。
步进电机增加相数能提高性能,但步进电机的结构和驱动电源都会更复杂,成本也会增加。
(3)保持转矩(HOLDING TORQUE):也叫最大静转矩,是在额定静态电流下施加在已通电的步进电机转轴上而不产生连续旋转的最大转矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
(4)步距精度:可以用定位误差来表示,也可以用步距角误差来表示。
(5)矩角特性:步进电机的转子离开平衡位置后所具有的恢复转矩,随着转角的偏移而变化。
步进电机静转矩与失调角的关系称为矩角特性。
(6)静态温升:指电机静止不动时,按规定的运行方式中最多的相数通以额定静态电流,达到稳定的热平衡状态时的温升。
(7)动态温升:电机在某一频率下空载运行,按规定的运行时间进行工作,运行时间结束后电机所达到的温升叫动态温升。
(8)转矩特性:它表示电机转矩和单相通电时励磁电流的关系。
(9)启动矩频特性:启动频率与负载转矩的关系称为启动矩频特性。
(10)运行矩频特性/惯频特性:略(11)升降频时间:指电机从启动频率升到最高运行频率或从最高运行频率降到启动频率所需的时间。
(12)DETENT TORQUE:是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE 在国内没有统一的翻译方式,容易产生误解;反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
9、步进电机的一些特点:(1)步进电机没有积累误差:一般步进电机的精度为实际步距角的百分之三到五,且不累积。
(2)步进电机在工作时,脉冲信号按一定顺序轮流加到各相绕组上(由驱动器内的环形分配器控制绕组通断电的方式)。
(3)即使是同一台步进电机,在使用不同驱动方案时,其矩频特性也相差很大。
(4)步进电机与其它电动机不同,其标称额定电压和额定电流只是参考值;又因为步进电机是以脉冲方式供电,电源电压是其最高电压,而不是平均电压,所以,步进电机可以超出其额定值范围工作。
但选择时不应偏离额定值太远。
(5)步进电机外表允许的最高温度:步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
(6)步进电机的力矩会随转速的升高而下降:当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。
在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
(7)步进电机低速时可以正常运转,但若高于一定频率就无法启动,并伴有啸叫声。
步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。
如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
(8)四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。
串联接法一般在电机转速较低的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。
(9)混合式步进电机驱动器的供电电源电压一般是一个较宽的范围(比如IM483的供电电压为12~48VDC),电源电压通常根据电机的工作转速和响应要求来选择。
如果电机工作转速较高或响应要求较快,那么电压取值也高,但注意电源电压的纹波不能超过驱动器的最大输入电压,否则可能损坏驱动器。
(10)供电电源电流一般根据驱动器的输出相电流I来确定。
如果采用线性电源,电源电流一般可取I 的1.1~1.3倍;如果采用开关电源,电源电流一般可取I 的1.5~2.0倍。
(11)当脱机信号FREE为低电平时,驱动器输出到电机的电流被切断,电机转子处于自由状态(脱机状态)。
在有些自动化设备中,如果在驱动器不断电的情况下要求直接转动电机轴(手动方式),就可以将FREE信号置低,使电机脱机,进行手动操作或调节。
手动完成后,再将FREE信号置高,以继续自动控制。
(12)用简单的方法调整两相步进电机通电后的转动方向,只需将电机与驱动器接线的A+和A-(或者B+和B-)对调即可。
10、步进电机驱动器的一些特点:(1)构成步进电机驱动器系统的专用集成电路:A、脉冲分配器集成电路:如三洋公司的PMM8713、PMM8723、PMM8714等。
B、包含脉冲分配器和电流斩波的控制器集成电路:如SGS公司的L297、L6506等。
C、只含功率驱动(或包含电流控制、保护电路)的驱动器集成电路:如日本新电元工业公司的MTD1110(四相斩波驱动)和MTD2001(两相、H桥、斩波驱动)。
D、将脉冲分配器、功率驱动、电流控制和保护电路都包括在内的驱动控制器集成电路,如东芝公司的TB6560AHQ、MOTOROLA公司的SAA1042(四相)和ALLEGRO公司的UCN5804(四相)等。
(2)“细分驱动”概述:概念:将“电机固有步距角”细分成若干小步的驱动方法,称为细分驱动,细分是通过驱动器精确控制步进电机的相电流实现的,与电机本身无关。
其原理是,让定子通电相电流并不一次升到位,而断电相电流并不一次降为0(绕组电流波形不再是近似方波,而是N级近似阶梯波),则定子绕组电流所产生的磁场合力,会使转子有N个新的平衡位置(形成N个步距角)。
最新技术发展:国内外对细分驱动技术的研究十分活跃,高性能的细分驱动电路,可以细分到上千甚至任意细分。
目前已经能够做到通过复杂的计算使细分后的步距角均匀一致,大大提高了步进电机的脉冲分辨率,减小或消除了震荡、噪声和转矩波动,使步进电机更具有“类伺服”特性。
对实际步距角的作用:在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己对步距角的要求。
如果使用细分驱动器,则用户只需在驱动器上改变细分数,就可以大幅度改变实际步距角,步进电机的…相数‟对改变实际步距角的作用几乎可以忽略不计。