步进电机驱动芯片类型
步进电机驱动芯片有哪些_六款步进电机驱动芯片
步进电机驱动芯片有哪些_六款步进电机驱动芯片步进电机基本原理工作原理:通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。
该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。
当定子的矢量磁场旋转一个角度。
转子也随着该磁场转一个角度。
每输入一个电脉冲,电动机转动一个角度前进一步。
它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。
改变绕组通电的顺序,电机就会反转。
所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
发热原理:通常见到的各类电机,内部都是有铁芯和绕组线圈的。
绕组有电阻,通电会产生损耗,损耗大小与电阻和电流的平方成正比,这就是我们常说的铜损,如果电流不是标准的直流或正弦波,还会产生谐波损耗;铁心有磁滞涡流效应,在交变磁场中也会产生损耗,其大小与材料,电流,频率,电压有关,这叫铁损。
铜损和铁损都会以发热的形式表现出来,从而影响电机的效率。
步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的频率也随转速而变化,因而步进电机普遍存在发热情况,且情况比一般交流电机严重。
步进电机用途步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
步进电机分类1、步进电机结按构分类步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
TB6600FG__步进电机驱动IC(中文)
6-1. 电流波形与混合衰减模式的设置
PWM 运行的周期等于五个 OSCM 周期。 快速衰减模式的比值 40%始终固定不变。
译文
TB6600FG
本资料是为了参考的目的由原始文档翻译而来。 使用本资料时,请务必确认原始文档关联的最新 信息,并遵守其相关指示。
原本:”TB6600FG” 2014-03-03 翻译日:2014-04-10
译文
TOSHIBA BiCD 单晶硅集成电路
TB6600FG
PWM 斩波型双极 步进电机驱动 IC
10,11 OUT2A
13,14 NFA
预 -驱动
H-桥 驱动器 B
OUT1B 6,7
1,64 OUT2B
NFB 3,4
47
45
20
8
TQ
SGND
PGNDA PGNDB
Vref 的设置
输入 TQ L H
电压比
30% 100%
4
2014-03-03
译文
TB6600FG
功能描述 1. 励磁设置
利用 M1,M2 与 M3 输入,可以下八种模式中选择励磁模式。在马达运行期间,在 M1, M2, 或 M3 输入改变时, 新励磁模式可从初始模式启动。在这种情况下,输出电流波形不能再继续。
衰减模式的效应?增大电流正弦波?减小电流假若因电流衰减速度较快电流在短时间内即被减小至预定值?减小电流假若因电流衰减速度缓慢需花费较长时间才能降低电流在混合衰减与快速衰减模式期间如果预定电流电平小于rnf电流监控点时的输出电流则充电模式在下一个斩波循环中将消失虽然在实际操作中电流控制模式被暂时切换到充电模式已进行电流传感且电流被控制在慢速与快速衰减模式在mdt点将模式从慢速衰减模式切换到快速衰减模式
电机驱动芯片选型-步进电机和BLDC-Allegro

厂家型号描述Allegro A3901Dual Full Bridge Low Voltage Motor DriverAllegro A3916Dual DMOS Full-Bridge Motor DriverAllegro A3966Dual Full-Bridge PWM Motor DriverAllegro A3967Microstepping Driver with TranslatorAllegro A3977Microstepping DMOS Driver with TranslatorAllegro A3979Microstepping DMOS Driver with TranslatorAllegro A3981K Automotive, Programmable Stepper DriverAllegro A3982DMOS Stepper Motor Driver with TranslatorAllegro A3983DMOS Microstepping Driver with TranslatorAllegro A3984DMOS Microstepping Driver with TranslatorAllegro A3985Digitally Programmable Dual Full-Bridge MOSFET DriverAllegro A3987DMOS Microstepping Driver with TranslatorAllegro A3988Quad DMOS Full Bridge PWM Motor DriverAllegro A3989Bipolar Stepper and High Current DC Motor DriverAllegro A3992DMOS Dual Full-Bridge Microstepping PWM Motor DriverAllegro A3995DMOS Dual Full Bridge PWM Motor DriverAllegro A3998Dual DMOS Full Bridge Motor Driver With Serial Port Control and Allegro A4970Dual Full-Bridge PWM Motor DriverAllegro A4975Full-Bridge PWM Microstepping Motor DriverAllegro A4979Microstepping Programmable Stepper Motor Driver With Stall Dete Allegro A4980K Automotive, Programmable Stepper DriverAllegro A4982DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A4983DMOS Microstepping Driver with TranslatorAllegro A4984DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A4985DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A4986DMOS Dual Full-Bridge PWM Motor Driver With Overcurrent Protect Allegro A4987DMOS Dual Full-Bridge PWM Motor Driver with Overcurrent Protect Allegro A4988DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A4989Dual Full-Bridge MOSFET Driver with Microstepping Translator Allegro A4990K Automotive Dual Full Bridge DriveAllegro A4992K Automotive Stepper DriverAllegro A4993Automotive Stepper Motor DriverAllegro A5976Microstepping DMOS Driver with TranslatorAllegro A5977Microstepping DMOS Driver with TranslatorAllegro A5979Microstepping DMOS Driver with TranslatorAllegro A5984DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A5985DMOS Microstepping Driver with Translator And Overcurrent Prote Allegro A5988Bipolar Stepper and High-Current DC Motor DriverAllegro A5989Bipolar Stepper and High-Current DC Motor DriverAllegro A5990Quad DMOS Full-Bridge PWM Motor DriverAllegro AMT49701Quad DMOS Full-Bridge PWM Motor DriverAllegro AMT49702Dual DMOS Full-Bridge Motor Driver后缀“K”表示汽车级产品(通过 AEC-Q100 认证)下列器件已停产:A3986, A3972电桥数量峰值输出电流最大电源电压接口位置反馈最小电源电压Parallel External 2.5 5.50.4Full-Bridge x2 Parallel External 2.7151Full-Bridge x2 PH/EN External 4.75300.75Full-Bridge x2 Translator (Step/DIR)External 4.75300.85Full-Bridge x2 Translator (Step/DIR)External835 2.5Full-Bridge x2 Translator (Step/DIR)External835 2.5Full-Bridge x2 SPI,Translator (Step/DIR)External732 1.4Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 SPI External1250Full-Bridge x2 Translator (Step/DIR)External850 1.5Full-Bridge x2 Parallel External836 1.2Full-Bridge x4 Parallel,PH/EN External836 1.2Full-Bridge x4 SPI External1550 1.5Full-Bridge x2 PH/EN External836 2.4Full-Bridge x4 SPI External950 1.5Full-Bridge x2 Parallel External7.45451Full-Bridge x2 Parallel External550 1.5Full-Bridge x1 SPI,Translator (Step/DIR)External750 1.5Full-Bridge x2 SPI,Translator (Step/DIR)External 3.332 1.4Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External835 2.5Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External8351Full-Bridge x2 Parallel External8352Full-Bridge x2 Parallel External8351Full-Bridge x2 Translator (Step/DIR)External8352Full-Bridge x2 Translator (Step/DIR)External1250 1.2Full-Bridge x2 Parallel External632 1.4Full-Bridge x2 SPI,Translator (Step/DIR)External 3.832 1.4Full-Bridge x2 SPI,Translator (Step/DIR)Open Loop 3.532 1.4Full-Bridge x2 Translator (Step/DIR)External840 2.8Full-Bridge x2 Translator (Step/DIR)External840 2.8Full-Bridge x2 Translator (Step/DIR)External840 2.8Full-Bridge x2 Translator (Step/DIR)External8402Full-Bridge x2 Translator (Step/DIR)External8402Full-Bridge x2 Parallel External840 1.6Full-Bridge x4 Parallel External840 1.6Full-Bridge x4 Parallel External840 1.6Full-Bridge x4 Parallel External4181Full-Bridge x4 Parallel External 3.5151Full-Bridge x2封装DFN Consumer,Industrial QFN Consumer,Industrial SOIC Consumer,Industrial SOIC Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial TSSOP AutomotiveSOIC Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial QFN,LQFP Consumer,Industrial QFN Consumer,Industrial DIP,TSSOP Consumer,Industrial QFN Consumer,Industrial QFN Consumer,Industrial SOIC Consumer,Industrial DIP,SOIC Consumer,Industrial TSSOP Consumer,Industrial TSSOP AutomotiveQFN,TSSOP Consumer,Industrial QFN Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN Consumer,Industrial TSSOP Consumer,Industrial TSSOP AutomotiveTSSOP AutomotiveTSSOP AutomotiveTSSOP Consumer,Industrial TSSOP Consumer,Industrial TSSOP Consumer,Industrial QFN,TSSOP Consumer,Industrial QFN Consumer,Industrial QFN Consumer,Industrial QFN Consumer,Industrial QFN Consumer,Industrial,Of QFN Consumer,Industrial TSSOP AutomotiveFull, Half Step Resolution, Single Supply, Sleep ModeInternal PWM Current Control, Single Supply, OCP Protection, Fault Output, Sleep Mode, Parallel Ope Internal PWM Current Control, Full, Step Resolution, Sleep ModeInternal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, Sleep Mode, Automatic Mixed Dec Internal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, Sleep Mode, Automatic Mixed Dec Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Sleep Mode, Automatic Mixed De Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Programable Fa Internal PWM Current Control, Full, Half Step Resolution, Sleep Mode, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, Sleep Mode, Automatic Mixed Dec Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Sleep Mode, Automatic Mixed De Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Sleep Mode, Mixed Decay Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Sleep Mode, Au Internal PWM Current Control, Full, Half, 1/4 Step Resolution, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4 Step Resolution, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Sleep Mode, Mi Internal PWM Current Control, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, OCP Protection, Sleep Mode, 3.3 Internal PWM Current Control, Full, Half Step Resolution, Sleep ModeInternal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, Automatic Mixed DecayInternal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Programable Fa Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Programable Fa Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Sleep Mode, Au Internal PWM Current Control, Full, Half, 1/4, 1/8, 1/16 Step Resolution, Sleep Mode, Automatic Mix Internal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, OCP Protection, Sleep Mode, Aut Internal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, OCP Protection, Sleep Mode, Aut Internal PWM Current Control, Full, Half, 1/4 Step Resolution, OCP Protection, Sleep Mode, Mixed De Internal PWM Current Control, Full, Half, 1/4 Step Resolution, OCP Protection, Sleep Mode, Mixed De Internal PWM Current Control, Full, Half, 1/4, 1/8, 1/16 Step Resolution, OCP Protection, Sleep Mod Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Sleep Mode, Mixed Decay Internal PWM Current Control, Full Step Resolution, Single Supply, Sleep ModeInternal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, Single Supply, OCP Protection, Integrated Current Sense, Internal PWM Current Control, 50V Transient compatible, Full, Half, 1/4, Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Fault Output, Internal PWM Current Control, Full, Half, 1/4, 1/8 Step Resolution, OCP Protection, Sleep Mode, Aut Internal PWM Current Control, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Sleep Mode, Au Internal PWM Current Control, Full, Half, 1/4, 1/8, 1/16, 1/32 Step Resolution, Single Supply, OCP Internal PWM Current Control, Full, Half, 1/4, 1/8, 1/16, 1/32 Step Resolution, Single Supply, OCP Internal PWM Current Control, Full, Half, 1/4 Step Resolution, Single Supply, OCP Protection, Sleep Internal PWM Current Control, Full, Half, 1/4 Step Resolution, Single Supply, OCP Protection, Sleep Adaptive Percent fast decay, Adjustable off time, Internal PWM Current Control, Full, Half, 1/4 Ste Internal PWM Current Control, Full, Half, 1/4 Step Resolution, Single Supply, OCP Protection, Sleep Internal PWM Current Control, Half step resolution, Single Supply, OCP Protection, Fault Output, SlParallel OperationAutomatic Mixed DecayAutomatic Mixed Decay, Automatic Mixed Decaytion, Programable Fault Output, Sleep Mode, Advanced DiagnosticsMixed DecayAutomatic Mixed Decay, Automatic Mixed Decay, Mixed Decaytion, Sleep Mode, Automatic Mixed Decaytion, Sleep Mode, Mixed Decayion, Sleep Mode, 3.3/5.0V LDO, Mixed Decayixed Decaytion, Programable Fault Output, Sleep Mode, Advanced Diagnosticstion, Programable Fault Output, Sleep Mode, Advanced Diagnosticstion, Sleep Mode, Automatic Mixed DecayMode, Automatic Mixed Decayion, Sleep Mode, Automatic Mixed Decayion, Sleep Mode, Automatic Mixed DecaySleep Mode, Mixed DecaySleep Mode, Mixed Decayrotection, Sleep Mode, Automatic Mixed Decay, Mixed Decayply, OCP Protection, Programmable Fault Output, Sleep Mode, Mixed Decaye, Full, Half, 1/4, 1/16 Step Resolution, OCP Protection, Programable Fault Output, Sleep Mode, Advanced Dia tion, Fault Output, Sleep Mode, Automatic Mixed Decayion, Sleep Mode, Automatic Mixed Decaytion, Sleep Mode, Automatic Mixed DecaySingle Supply, OCP Protection, Fault Output, Sleep Mode, Adaptive Percent Fast DecaySingle Supply, OCP Protection, Fault Output, Sleep Mode, Adaptive Percent Fast DecayCP Protection, Sleep Mode, Mixed DecayCP Protection, Sleep Mode, Mixed DecayFull, Half, 1/4 Step Resolution, Single Supply, OCP Protection, Sleep Mode, Mixed Decay, diagnostic output CP Protection, Sleep Mode, Mixed Decayon, Fault Output, Sleep Modeep Mode, Advanced Diagnostic d Decay, diagnostic output。
步进电机驱动芯片资料 MC33886

33INTEGRATED CIRCUIT DEVICE DATA
STATIC ELECTRICAL CHARACTERISTICS Characteristics noted under conditions 5.0 V ≤ VPWR ≤ 28 V and -40°C ≤ TA ≤ 125°C, unless otherwise noted. Typical values noted reflect the approximate parameter mean at TA = 25°C under nominal conditions, unless otherwise noted.
cause malfunction or permanent damage to the device. 10. Exposed heat sink pad plus the power and ground terminals comprise the main heat conduction paths. The actual RθJ-B (junction-to-PC
outputs are tristate.
19
IN2
True Logic input control of OUT2 (i.e., IN2 logic HIGH = OUT2 HIGH).
MOTOROLA ANALOG INTEGRATED CIRCUIT DEVICE DATA
33886 3
MAXIMUM RATINGS All voltages are with respect to ground unless otherwise noted.
高可靠性的步进电机驱动芯片设计

高可靠性的步进电机驱动芯片设计高可靠性的步进电机驱动芯片设计摘要:随着电子设备的普及和应用领域的不断扩大,步进电机已成为广泛使用的一种电机技术。
而步进电机的驱动芯片对于电机运行的稳定性和可靠性至关重要。
本文以设计高可靠性的步进电机驱动芯片为目标,针对常见的步进电机驱动芯片设计问题展开了详细探讨。
一、引言步进电机是一种常见的电机类型,在许多领域中都有广泛的应用,如打印机、数控机床、机器人等。
步进电机的特点是运动准确、结构简单、操作方便,因此被广泛用于需要精细定位和转动控制的场合。
然而,步进电机驱动芯片在电机运行过程中的可靠性对于设备性能及寿命都具有重要影响。
二、步进电机驱动芯片设计的关键问题1. 电流控制电机在正常运行过程中需要稳定的电流供给。
而电机转动的速度和角度决定了所需的电流大小,在设计步进电机驱动芯片时,需要考虑如何实现电流控制和调整。
一种常见的方法是采用PWM控制技术,通过改变PWM信号的占空比来控制输出电流的大小,并通过反馈调整控制电流的稳定性。
2. 步进驱动方式选择步进电机的驱动方式有全步进和半步进两种。
全步进电机以完全步距角进行运行,转动角度精确,但转速较慢;半步进电机则可以在相邻两个步距角之间运行,具有较高的转速和较精确的角度控制。
在设计步进电机驱动芯片时,需要根据实际需求选择适合的驱动方式。
3. 电机保护功能电机在使用过程中可能会出现过流、过热等问题,为了保护电机的安全运行,步进电机驱动芯片应具备相应的保护功能。
例如,可采用过流保护电路和温度传感器等设计措施,实时检测并保护电机在出现异常情况时及时停机,避免电机和驱动芯片的损坏。
4. 高灵敏度的驱动电路设计步进电机驱动芯片需要具有高灵敏度的驱动电路设计,能够精确接收和处理传感器的反馈信号,并根据反馈信号调整输出电流和工作状态,实现电机的精确控制和定位。
驱动电路的设计要考虑信号噪声和干扰的抑制,采用合适的滤波和放大技术,确保电机驱动信号的稳定和可靠。
HHBY THB6064H步进电机芯片 使用说明
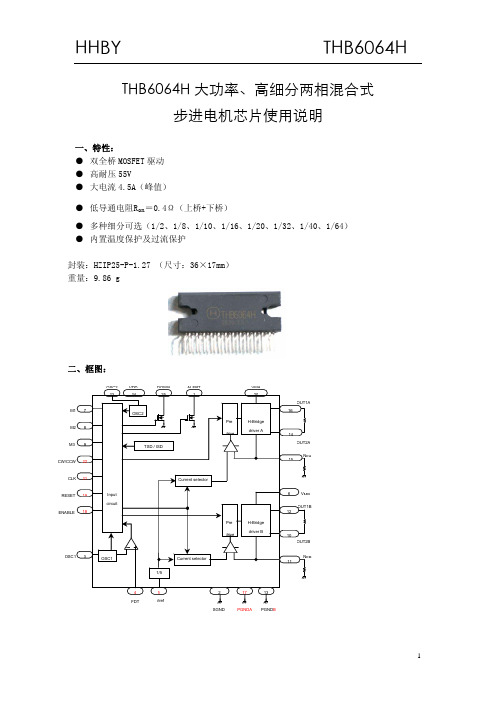
THB6064H 大功率、高细分两相混合式步进电机芯片使用说明一、特性:● 双全桥MOSFET 驱动● 高耐压55V● 大电流4.5A(峰值)● 低导通电阻R on =0.4Ω(上桥+下桥)● 多种细分可选(1/2、1/8、1/10、1/16、1/20、1/32、1/40、1/64) ● 内置温度保护及过流保护封装:HZIP25-P-1.27 (尺寸:36×17mm)重量:9.86 g二、框图:M3SGNDPGNDA PGND B三、管脚说明:Pin No I/O Symbol Functional Description1 Output ALERT 温度保护及过流保护输出端2 — SGND 信号地外部与电源地相连3 — PWM 斩波频率控制端4 Input FDT 衰减方式控制端5 Input V ref电流设定端6 Input VMB 电机驱动电源 B相电源与A相电源相连7 Input M1 细分数选择端(详见附表)8 Input M2 细分数选择端(详见附表)9 Input M3 细分数选择端(详见附表)10 Output OUT2B B相功率桥输出端211 — NFB B相电流检测端应连接大功率检测电阻一般为0.1Ω/2W12 Output OUT1B B相功率桥输出端113 — PGNDB B相驱动电源地与A相电源地及信号地相连14 Output OUT2A A相功率桥输出端215 — NFA A相电流检测端应连接大功率检测电阻一般为0.1Ω/2W16 Output OUT1A A相功率桥输出端117 — PGNDA 驱动电源地线18 Input ENABLE 使能端ENABLE=0所有输出为ENABLE=1正常工作19 Input RESET 上电复位端20 Input VMA A相电机驱动电源与A相电源相连21 Input CLK 脉冲输入端22 Input CW/CCW 电机正反转控制端23 — OSC2 自动半流锁定反应时间调整端,需处接电容典型值1500P,可从0.2秒~2秒24 Input V DD5V电源芯片工作电源要求稳压(4.5V~5.5V)25 Output D OWN半流锁定控制端四、使用说明1.M1、M2、M3可选择八种不同细分状态M1 M2 M3 细分数0 0 0 1/20 0 1 1/80 1 01 1/101 0 1 1/161 0 0 1/201 0 1 1/321 1 0 1/401 1 1 1/642.PFD为衰减方式控制端,调节此端电压可以选择不同的衰减方式,从而获得更好的驱动效果:V PFD衰减方式3.5<V PFD<V DD快衰减1.1V<V PFD<3.1V混合式衰减0V<V PFD<0.8V 慢衰减3.Vref:电流设定端,调整此端电压即可设定驱动电流值Io=Vref/5Rs 【Rs为检测电阻】4.D OWN:半流锁定控制与P23脚OSC2一起完成,电机锁定时降低功耗的功能。
TB6560步进电机驱动
题目:TB6560AHQ步进电机驱动目录摘要步进电机是一种将电脉冲转化为角位移的执行机构。
驱动器接收到一个脉冲信号后,驱动步进电机按设定的方向转动一个固定的角度。
首先,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。
其次,通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
目前,步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。
步进电机驱动电路常用的芯片有L297和L298组合应用、3977、8435等,这些芯片一般单项驱动电流在2A左右,无法驱动更大功率电机,限制了其应用范围。
本文基于东芝公司2008年推出的步进电机驱动芯片TB6560提出了一种步进电机驱动电路的设计方案。
关键字:步进电机角位移 L297 L298 3977 8435 定位控制定速控制TB65601.概述1.1TB6560驱动芯片TB6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片,内置双全桥MOSFET驱动、温度保护及过流保护。
1.1.1在低转速运行系统中的应用优势低转速运行系统,是指时钟频率不高、以小电流驱动为主的系统,比如转速为每分钟几转到100转,用户在此种应用条件下如使用传统的驱动方案,要么因集成芯片细分太低,而使低速振动偏大;要么不得不选择细分很高的驱动器,使成本不必要的增加。
TB6560AHQ驱动芯片的优势:(1)电机振动小噪音低:因为芯片自带2、8、16细分可选,足够满足每分钟从几到近千转的应用要求。
(2)嵌入式驱动器发热少:芯片自带的散热面积足以单独支持小电流驱动的散热要求。
(3)支持各种步进电机选型:客户可选择力矩稍大的混合式或永磁式步进电机,使电机工作在允许最大转矩的百分之30至50之间,电机成本几乎不变;芯片提供多档电流设置和电流衰减模式,支持相同动力指标下各种不同参数的步进电机。
1.1.2在高转速运行系统中的应用优势高转速运行系统,是指时钟频率较高、以大电流驱动为主的系统,比如转速为每分钟接近千转,此种应用条件下如使用传统的驱动方案,要么因集成芯片细分太低,而使系统调速范围过小;要么因细分很高而过多增加了成本,还可能会出现因高频力矩下降导致的振动和噪音TB6560AHQ驱动芯片的优势:(1)电机振动小噪音低:由于TB6560AHQ芯片芯片自带16细分功能,能够满足每分钟从几到近千转的应用要求,且自动产生纯正的正弦波控制电流,与其它高集成度芯片相比,在相同高转速下力矩不但不会下降,反而有所增加;由于TB6560AHQ芯片可承受峰值40V的驱动电压、峰值3.5A的电流,为电机在大力矩、高转速下持续运行提供了的技术保障。
步进电机控制与驱动一体芯片TMC223原理与应用

◆波形发生器可以根பைடு நூலகம்所选择的位置或速度控制模式自动配置
◆可在电机运动过程中及时更改目标位置
◆外部参考信号出入,可用做电机限位信号
●2线的串行接口
◆传输速率350KBPS
◆可以传输诊断,状态信息以及运动参数
◆可编程的节点地址数32个
●无需外部传感器的失速探测功能
1. 功能
TMC223是一款集成了 步进电机微步控制、驱动、RAM、OTP存储器以及该公司的专利技术StallGuard功能与一起的高性能芯片。RAM或OTP存储器用来存储电机参数和一些配置参数。TMC223自身带有最大16倍的细分,驱动电流可达0.8A,通过2根线的串行接口与微控制器通讯,只需要一个廉价的微控制器和TMC223就可以组成一个完整的单轴步进电机控制驱动系统。TMC223主要部分的性能如下:
TMC223内部具有温度检测功能,到温度达到极限温度时电路会自动进入关闭状态,而且在这之前会产生温度报警信号;此外TMC223还具有电压检测功能,电路也会进入关闭状态当检测到电压低于极限值时,而且在这之前也会有报警信号产生。
4. 系统构成
图8 TMC223典型的应用
整个系统的电路非常简单,采用任何具有IIC通讯的微处理器结合TMC223芯片便构成单轴步进电机控制驱动系统,整个系统只需要2个主要的芯片即可,其中所有的运动功能包括波形发生器,脉冲发生器;驱动功能包括PWM,功率驱动等主要功能均由TMC223来实现,外部直接连接两相步进电机,而微处理器负责通讯以及向TMC223发送指令,和传统的方式相比大大减轻的微处理器的负担,可以将其解放出来做更高层次的开发如I/O控制等。
◆可以检测电机超载避免丢步
【最新】步进电机驱动芯片
【最新】步进电机驱动芯片TMC429-I电机三轴联动驱动电路TRINAMIC步进电机驱动器TMC429是小尺寸、高性价比的二相步进电机控制芯片。
它带有二个独立的SPI口,可分别与微处理器和带有SPI接口的步进电机驱动器相连以构成完整的系统。
其控制指令可由微处理器通过SPI接口给定。
TMC429提供了所有与数字运动控制有关的功能,包括位置控制、速度控制及微步控制等步进电机常用的控制功能。
这些功能如果让微处理器来完成,则需占用大量的系统资源,所以它的使用可将微处理器解放出来,以把资源用在接口的扩展和对步进电机的更高层次的控制上。
此外,TMC236也是TRINAMIC公司开发的带有串行接口的步进电机驱动器。
3个TMC236连结构成的菊花链(Daisychain)结构便是一种基于串行通讯的网络结构,可以使多个具有串行通信接口的设备以接力的方式传递数据。
TMC429可以通过SPI接口与它们相连接,以同时控制3个二相步进电机。
TMC429的主要特点如下:●可以控制多达3轴的2相步进电机而且各轴之间可以独立运行●与微控制芯片和驱动芯片通过简单的SPI通讯,使用简单,便于构成虚拟的闭环网络,控制器可以时刻得知驱动器的状态;也可以输出step/dir 控制信号●宽范围时钟频率,CUP时钟频率可高达32MHz●内有24bit位置计数器●根据微处理器给定的电机运动参数(位置,速度、加速度),依照梯形或三角形的速度由线产生驱动脉冲波形和顺序,来对电机进行位置和速度控制。
可以在电机运行过程中更改电机参数如速度,加速度,目标位置等。
●可微步控制。
最高256细分●通过可编程电流比例控制,可以使电机在不同的工作状态下采用大小不同的工作电流。
控制电机工作可在8个档次上,分别是最大电流的12.5%、25%、37.5%、50%、62.5%、75%、87.5%、100%●根据不同的应用提供有SSOP16、SOP24,QFN32三种封装可选主要性能可控制1-3个步进电机,自动斜坡轨迹生成与主控制器SPI接口,接线简单直接连接标准SPI电机驱动IC,也可通过step/dir传统控制方式IC状态可读,SPI传输速率可编程最高可达1Mbit/SCPU时钟频率范围宽,最高可达32MHz内置24bit长度计数器,脉冲速度可达20kpps细分可选(1,2,4,8,16,32,64),输出正弦电流波形可编程运行时可更改参数如:速度、加速度、位置值“position reached”直接触发到达目标位置输出电流全程监控低功耗,CPU 4MHz时仅1.25mACMOS/TTL电平兼容,3.3V/5V封装形式QFN32,SSOP16、SOP24可选。
步进电机控制芯片与驱动电路
步进电机控制芯片TC1002特点:
44引脚QFP封装
高达10MHz时钟
内部集成模拟SINE/COSINE发生器,DAC
PWM电流控制,可自动减少电流
14种细分选择,细分数的改变不会中断马达的运行
Standalone or Buss模式
5V电源供电
过流保护ቤተ መጻሕፍቲ ባይዱ
过温保护
错误输出
整步输出
消除共振
TC1002步进电机控制芯片方案成本低,成品成本大概在75-85之间,更多技术支持请联系HP134-3440-1340Q363379189邓生/邓工。
步进电机控制芯片TC1002的应用驱动电路如下:
上面这种应用是与IR2103搭配使用。也可以与L298、L6203搭配使用。控制驱动电路如下:
步进电机控制芯片与驱动电路
步进电机控制芯片TC1002是一个高性能二相步进电机细分驱动控制器。TC1002支持14种细分等级,最大256细分,最大支持4.2A和8.0A电流。TC1002它包含一个模拟SINE/COSINE信号发生器,完整的数字控制集成在一颗芯片中,高集成度减少产品的设计周期。尽量的减少了外部的分立元件,提供给设计者一个简单但又高效的产品。
THB7128 高细分、大功率 两相混合式步进电机驱动芯片说明书
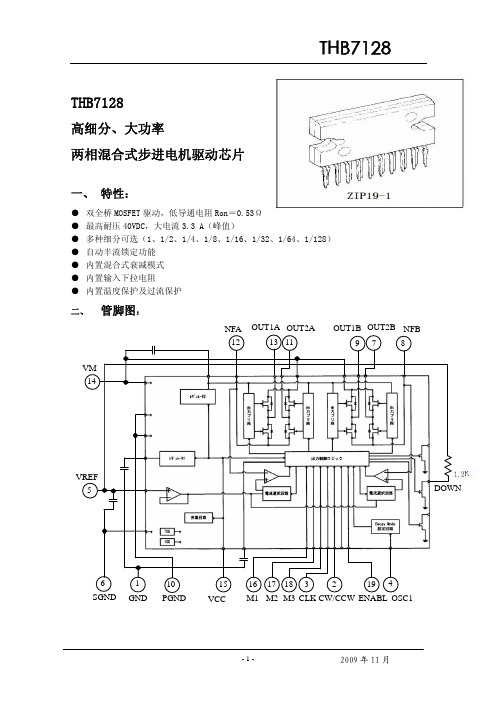
THB7128高细分、大功率两相混合式步进电机驱动芯片一、 特性:●双全桥MOSFET 驱动,低导通电阻Ron=0.53Ω●最高耐压40VDC,大电流3.3 A(峰值)●多种细分可选(1、1/2、1/4、1/8、1/16、1/32、1/64、1/128)●自动半流锁定功能●内置混合式衰减模式●内置输入下拉电阻●内置温度保护及过流保护二、管脚图:OUT1A OUT2B OUT2AOUT1B VCC191715 42 1816310 1三、 管脚说明:端子 端子符号 端子说明1 GND 地2 CW/CCW 正/反转信号输入端3 CLK 脉冲信号输入端4 OSC1 斩波频率设定电容连接端5 VREF 电流设定端6 GND 地7 OUT2B B相 OUT输出端8 NFB B相 电流检测电阻连接端9 OUT1B B相 OUT输出端10 GND 地11 OUT2A A相 OUT输出端12 NFA A相 电流检测电阻连接端13 OUT1A A相 OUT输出端14 VM 电源VM连接端15 VCC 接VCC电源16 M1 细分设置端17 M2 细分设置端18 M3 细分设置端19 ENABLE 脱机信号控制端四、 电器参数:1、最高额定值Absolute Maximum Ratings (Ta 25°C)项目 符号 额定值 符号 最高工作电压 VMmax 36V最大输出电流 Iomax 3.3A 最高逻辑输入电压 VINmax 6VVREF最高输入电压 VREFmax 3V 工作环境温度 Topg -30~+105℃保存环境温度 Tstg -40~+125℃2、正常运行参数范围Operating Range (Ta =30 to 85°C)参数 符号 最小 典型.最大 单位 逻辑输入电压 VIN2 5.0 6 V数字信号电源 VCC 3.3 5.0 6 V电源电压 VM9 −32V输出电流 Io0 − 3.0 A电流设定端 VREF0 −3V3、电器特性Electrical Characteristics (Ta = 25°C, VREF =1.5 V, VM = 24 V)项目 符号 条件 最小 标准 最大 符号待机时消耗电流 IMstn VCC=0 200 μA 消耗电流 IM VCC=5V 4 mA TSD温度 TSD 设计保证 180 ℃ Thermal Hysteresis值 ΔTSD 设计保证 40 ℃IinL1 VIN=0.8V 8 μA 逻辑端子输入电流IinH1 VIN=5V 50 μA 逻辑输入“H”Level电压 Vinh 2.0 V 逻辑输入“L”Level电压 Vinl 0.8 V 斩波频率 Fch Cosc1=100pF 83KHz OSC1端子充放电电流 Iosc1 10 μA 斩波振荡电路Vtup1 1 V 电压阈值 Vtdown10.5 V VREF端子输入电流 Iref VREF=1.5V CLK=10KHZ-0.5 μA 通电锁定切换频率 Falert 1.6 Hz Blanking时间 Tbl 1 uS 输出Ronu Io=2.0A、上側ON阻抗 0.3 Ω 输出ON阻抗Rond Io=2.0A、下側ON阻抗 0.25Ω 输出漏电流 Ioleak VM=36V 50 μA 二极管正向压降 VD ID=-2.0A 1.1V 电流设定基准电压 VRF VREF=1.5V、電流比100% 300 mV 输出短路保护Timer Latch时间 Tscp 256 μs五、 端子说明1、CLK脉冲输入端(脉冲上升沿有效)2、CW/CCW:电机正反转控制端CW/CCW为低电平时,电机正转CW/CCW为高电平时,电机反转3、ENABLE:使能端ENABLE端子为低电平时,输出强制关断,为高阻状态。
四线步进电机的驱动芯片
四线步进电机的驱动芯片1.引言1.1 概述四线步进电机是一种常见的电动机类型,具有广泛的应用领域。
它通过电流变化控制转子的位置,使得电机可以精确地进行步进运动。
相比其他类型的电机,四线步进电机具有结构简单、体积小、重量轻、响应速度快等特点,因此在自动控制系统、机械设备等方面得到了广泛应用。
在四线步进电机中,驱动芯片起着至关重要的作用。
驱动芯片是将控制信号转换为电流输出的关键部件,它能够提供适当的电流给步进电机,使其产生稳定的运动。
驱动芯片的性能和质量直接影响着整个步进电机系统的运行效果和稳定性。
随着科技的进步和需求的不断增加,驱动芯片在四线步进电机中的重要性也越来越凸显。
一方面,不断提高的需求使得对步进电机的精度和稳定性要求越来越高,这就对驱动芯片的性能提出了更高的要求,需要能够提供更加精确、稳定的控制信号。
另一方面,自动化技术的不断发展也推动了驱动芯片的创新和进步,使其能够更好地适应不同类型步进电机的控制需求。
未来,随着四线步进电机在机器人、自动化设备、医疗器械等领域的广泛应用,驱动芯片将继续发挥重要作用。
预计驱动芯片将朝着更高的集成度、更低的功耗和更高的精度方向发展。
同时,随着人工智能、物联网等技术的不断推进,驱动芯片可能会融入更多的智能化特性,提供更多样化、灵活性更强的控制方式,以满足不同领域对于步进电机驱动的需求。
总的来说,四线步进电机的驱动芯片在整个步进电机系统中具有重要的地位和作用。
其性能的提升和创新将不断促进步进电机的发展和应用,并推动自动化技术的进一步进步。
文章结构部分的内容可以按照以下方式编写:1.2 文章结构本文将按照以下结构进行叙述和讨论:第一部分是引言部分,首先对四线步进电机的驱动芯片进行一个简单的概述,介绍其基本工作原理和主要特点。
然后对整篇文章的结构进行说明,包括各部分的内容和组织方式。
最后明确论文的目的,即探讨驱动芯片在四线步进电机中的重要性和未来的发展方向。
第二部分是正文部分,主要分为两个小节。
THB6128高细分两相混合式步进电机驱动芯片说明书
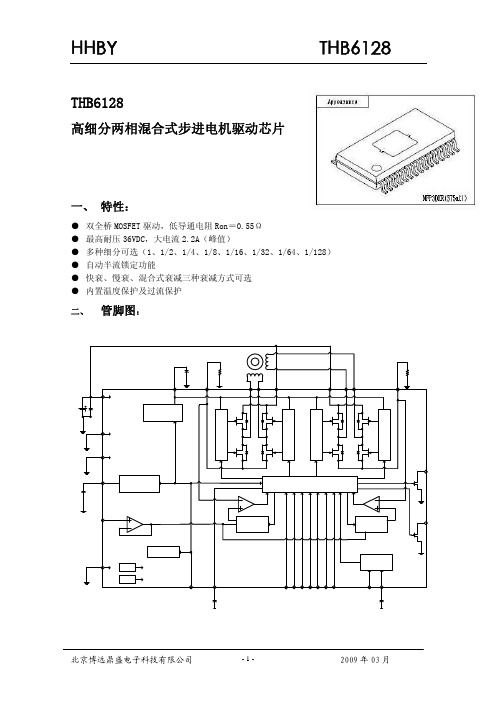
THB6128高细分两相混合式步进电机驱动芯片一、 特性:● 双全桥MOSFET驱动,低导通电阻Ron=0.55Ω● 最高耐压36VDC,大电流2.2A(峰值)● 多种细分可选(1、1/2、1/4、1/8、1/16、1/32、1/64、1/128) ● 自动半流锁定功能● 快衰、慢衰、混合式衰减三种衰减方式可选● 内置温度保护及过流保护二、 管脚图:三、 管脚说明:端子No 端子符号 端子说明17 DOWN 通电锁定时输出端14,23 SGND 信号地20 OSC1 斩波频率设定电容连接端18 FDT 衰减模式选择电压输入端15 VREF 电流设定端11 VMB B相 电机电源连接端28 M1 细分设置端27 M2 细分设置端26 M3 细分设置端13 OUT2B B相 OUTB输出端10 NFB B相 电流检测电阻连接端9 OUT1B B相 OUTB输出端12 PGNDB B相 功率地7 OUT2A A相 OUTA输出端6 NFA A相 电流检测电阻连接端3 OUT1A A相 OUTA输出端4 PGNDA A相 功率地25 ENABLE 脱机信号控制端24 RESET 复位信号输入端5 VMA A相 电机电源连接端21 CLK 脉冲信号输入端22 CW/CCW 正/反转信号输入端19 OSC2 通电锁定检出时间设定电容连接端16 MO 位置检出Monitor端30 VREG1 内部稳压器用电容连接端1 VREG2 内部稳压器用电容连接端2 VM 电机电源连接端29 ST/VCC 待机控制端四、 电器参数:1、最高额定值Absolute Maximum Ratings (Ta = 25°C)项目 符号 额定值 符号最高电源电压 VMmax 36V最大输出电流 Iomax 2.2A最高逻辑输入电压 VINmax 6VVREF最高输入电压 VREFmax 3V工作环境温度 Topg -20~+85℃保存环境温度 Tstg -55~+150℃2、正常运行参数范围Operating Range (Ta =30 to 85°C)参数 符号 最小 典型.最大 单位 逻辑输入电压 VIN 4.5 5.0 6 V电源电压 VM9 −36 V输出电流 Io−− 2 A电流设定端 VREF0 −3V3、电器特性Electrical Characteristics (Ta = 25°C, VREF =1.5 V, VM = 24 V)项目 符号 条件 最小 标准 最大 符号待机时消耗电流 IMstn ST=”L” 200 μA 消耗电流 IM ST=”H”、OE=”H”、无负载 4 mA TSD温度 TSD 180 ℃ Thermal Hysteresis值 ΔTSD 40 ℃ 逻辑端子输入电流IinL1 VIN=0.8V 8 μAIinH1 VIN=5V 50 μA 逻辑输入“H”Level电压 Vinh 2.0 V 逻辑输入“L”Level电压 Vinl 0.8 V FDT端子“H”Level电压 Vfdth 3.5 V FDT端子“M”Level电压 Vfdtm 1.1 3.1 V FDT端子“L”Level电压 Vfdtl 0.8 V 斩波频率 Fch Cosc1=100pF 100 KHz OSC1端子充放电电流 Iosc1 10 μA 斩波振荡电路Vtup1 1 V 电压阈值 Vtdown10.5 V VREF端子输入电流 Iref VREF=1.5V -0.5 μA DOWN输出残电压 VolDO Idown=1mA 400 mV MO端子残电压 VolMO Imo=1mA 400 mV 通电锁定切换频率 Falert Cosc2=1500pF 1.6 Hz OSC2端子充放电电流 Iosc2 TBD μA 通电锁定切换振荡电路Vtup2 TBD V 电压阈值 Vtdown2TBD V REG1输出电压 Vreg1 5 V REG2输出电压 Vreg2 19 V Blanking时间 Tbl 1 uS 输出Ronu Io=2.0A、上側ON阻抗 0.3 Ω 输出ON阻抗Rond Io=2.0A、下側ON阻抗 0.25 Ω 输出漏电流 Ioleak VM=36V 50 μA 二极管正向压降 VD ID=-2.0A 1 V 电流设定基准电压 VRF VREF=1.5V、電流比100% 300 mV 输出短路保护Timer Latch时间 Tscp 256 μs五、 使用说明1、细分设定(M1、M2、M3)M1 M2 M3 细分数L L L 1H L L 1/2L H L 1/4H H L 1/8L L H 1/16H L H 1/32L H H 1/64H H H 1/1282、衰减模式设定PDT为衰减方式控制端,调节此端电压可以选择不同的衰减方式,从而获得更好的驱动效果。
步进电机控制及驱动芯片A3977的应用
步进电机控制及驱动芯片A3977的应用文章对步进电机微步进驱动控制芯片A3977的特点、性能进行系统地说明,介绍了A3977主要功能的实现方法并给出应用电路,最后列举了在使用时的注意事项。
标签:步进电机、A3977一、引言随着微步进电机应用的日益广泛,其驱动电路的发展也相当迅速,各类控制芯片的功能越来越丰富,使用也越来越简便。
A3977是专门用于双极型步进电机驱动的集成电路,A3977是包含完整的控制和驱动电路的步进电机驱动芯片,它可以对双极性步进电机进行整步、半步、1/4步、1/8步运行控制,电机最大电压可达35V,电流最大可达2.5A,A3977内部拥有一固定关断时间的电流控制器,可采取快速、慢速和混合衰减等不同模式的续流方式,降低电机的噪声,提高步进精度,减小功率消耗,A3977应用电路结构简单、使用及控制方便,有着极其广泛的应用价值。
二、A3977功能描述大多数微步进电机驱动器都需要一些额外的控制线,通过D/A转换器为PWM电流调节器设置参考值以及通过相输入完成电流极性控制等。
许多改进型驱动器仍然需要一些输入来调整PWM电流控制模式使其工作在慢、快或混合衰减模式。
这就需要系统的微处理器额外负担8~12个需依靠D/A变换处理的输入端。
A3977可以通过其特有的译码器来使这些功能实现简单化,其最简单的步进输入只需“STEP”(步进)和“DIR”(方向)2条输入线,输出由DMOS的双H 桥完成。
通过“STEP”脚简单的输入1个脉冲就可以使电机完成1次步进,省去了相序表,高频控制线及复杂的编程接口。
A3977可以使双极性步进电机工作于整步、半步、1/4以及1/8细分工作运行。
芯片内两个H桥中每个全桥的电流,和所有的N沟道DMOSFET都是由固定关断时间的PWM(脉宽调制)来控制输出的。
在每一步中,每个全桥的电流值,都是由外部的电流采样电阻值,最大電流的参考电压,以及内部数模转化的结果来确定的。
f在芯片上电时,细分译码电路重置于初始状态,此时两相绕组的电流均设为+70%,电机转子位于初始位置,然后译码电路确定接下来的混合衰减方式。
两相混合式步进电机驱动芯片 BY-5064 使用说明
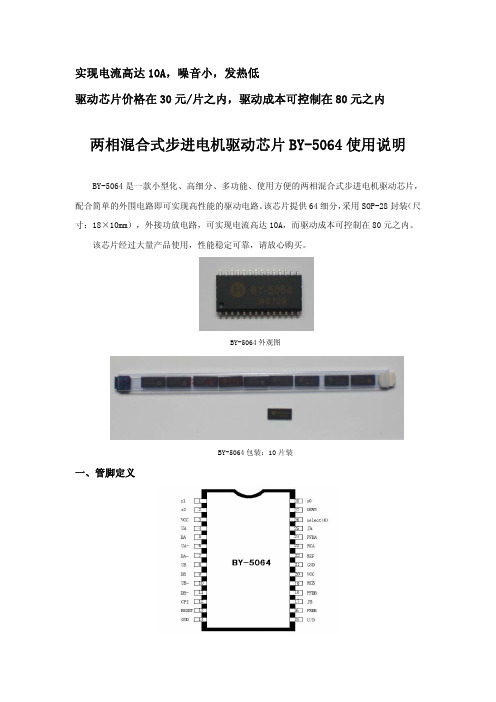
实现电流高达10A,噪音小,发热低驱动芯片价格在30元/片之内,驱动成本可控制在80元之内两相混合式步进电机驱动芯片BY-5064使用说明BY-5064是一款小型化、高细分、多功能、使用方便的两相混合式步进电机驱动芯片,配合简单的外围电路即可实现高性能的驱动电路。
该芯片提供64细分,采用SOP-28封装(尺寸:18×10mm),外接功放电路,可实现电流高达10A,而驱动成本可控制在80元之内。
该芯片经过大量产品使用,性能稳定可靠,请放心购买。
BY-5064外观图BY-5064包装:10片装一、管脚定义二、管脚说明管脚编号 管脚名称 属性 功能说明28 S0 数字、输入 细分数选择端(见细分数控制表)1 S1 数字、输入 细分数选择端(见细分数控制表)2 S2 数字、输入 细分数选择端(见细分数控制表)3 VCC 数字电源 芯片工作电源(+5V)4 UA 数字、大电流输出 A相H桥上端控制端5 DA 数字、大电流输出 A相H桥下端控制端6 UA- 数字、大电流输出 A相H桥上端控制端7 DA- 数字、大电流输出 A相H桥下端控制端8 UB 数字、大电流输出 B相H桥上端控制端9 DB 数字、大电流输出 B相H桥下端控制端10 UB- 数字、大电流输出 B相H桥上端控制端11 DB- 数字、大电流输出 B相H桥下端控制端12 CPI 数字、输入 步进脉冲输入端,下降沿有效13 RESET 数字、输入 芯片复位端,低电平有效14 GND 数字地 电源地15 U/D 数字、输入 旋转方向控制端16 FREE 数字、输入 脱机控制端,低电平有效17 JB 模拟、双向 B相电流检测输入端18 PFDB 模拟、输入 B相PFD调节输入端19 RCB 模拟、双向 B相斩波频率控制(外接RC)端20 VCC 模拟电源 芯片工作电源(+5V)21 GND 模拟地 电源地22 REF 模拟、输入 电流大小调节输入端23 RCA 模拟、双向 A相斩波频率控制(外接RC)端24 PFDA 模拟、输入 A相PFD调节输入端25 JA 模拟、双向 A相电流检测输入端26 Select(0) 数字、输入 NC27 DOWN 数字、输入 半流锁定外部控制端(见四)三、细分数控制S[2;1;0] 000 001 010 011 100 101 110 111 细分数 2 16 32 64 5 10 20 40四、外部控制半流锁定(以开漏方式输出down信号)1.芯片的down信号高有效,只输出。
AD556低压步进电机驱动芯片
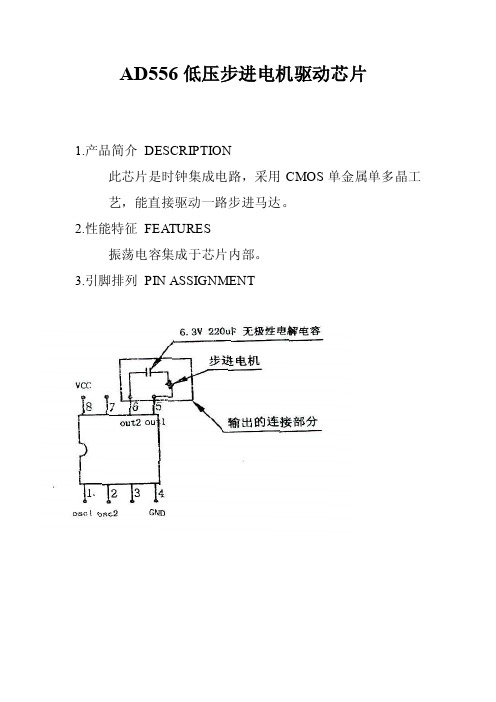
AD556 低压步进电机驱动芯片
1.产品简介 DESCRIPTION 此芯片是时钟集成电路,采用 CMOS 单金属单多晶工 艺,能直接驱动一路步进马达。
┉
0.2
┉
Vstart
1.0
2
Vdd
-1.7~+3.0
Vin/Vout
0~Vdd
Tamb
-10~+60
TsLd
-40~+120
单位 V UA sec
Ω ppm V s/d V V ℃ ℃
备注
无负载 Vdd-Vcc=1.4V Rload=200Ω △vdd=100mv
0.9V 停振
2.性能特征 FEATURES 振荡电容集成于芯片内部。
3.引脚排列 PIN ASSIGNMENT
4.引脚说明 PIN FUNCTION
引脚编号 1 2 3 4 5 6 7 8
符号 OSC1 OSC2
NC GND OUT1 OUT2 NC VCC
功能描述 晶振输入 晶振输出 空 接地 马达驱动 1 马达驱动 2 空 电源电压
QQ:4080
参数 工作电压 静态电流 马达输出周期 马达输出电阻 振荡器稳定性 振荡器启振电压 振荡器记时误差 电源电压 输入/输出电压 工作环境温度 储藏温度
符号 最小值 典型值 最大值
Vdd
1
┉
1.8
Idd
┉
1.2
2.0
Tm
┉
2
┉
Rout
步进电机驱动芯片THB6064

V
(1.3)
0.8
⎯
μs
0.5
V
⎯
°C
⎯
°C
35 μsec
(3.0) Hz
输出参数 Output Block
参数
符号
测试条件
Output ON resistor
Output transistor switching characteristics
Output leakage current Upper side
0V<VPFD<0.8V
快衰减
3. Vref:电流设定端,调节此端电压即可设定驱动电流值 Io(100%)=Vref*(1/3)*(1/Rs)
【Rs 为检测电阻】
4. Down: 半流锁定控制,电机锁定时降低功耗的功能。(参见原理图) 当 CLK 小于 1.5Hz 时,Down 输出为 0; 当 CLK 大于 1.5Hz 时,Down 输出为 1;
重量:9.86 g (typ.)
二. 框图
2
三. 管脚说明:
3
管脚 编号
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
输入/ 输出 输出 —— —— 输入 输入 输入 输入 输入 输入 输出 —— 输出 —— 输出 —— 输出 —— 输入 输入 输入 输入 输入 —— 输入 输出
M2
M3
0
0
0
0
0
1
0
1
0
0
1
1
1
0
0
1
0
1
1
1
0
1
1
步进电机控制-步进电机控制芯片UDN2916LB原理及应用

步进电机控制芯片UDN2916LB原理及应用作者:福建实达电脑设备公司税控产品技术部陈磊来源:21IC中国电子网Email: ****************.cn摘要:UDN2916LB是SANKEN公司推出的一款2相步进电机双极驱动集成电路(IC),特别适用于目前国内税控市场双步进微型打印机电机的控制,本文介绍了UDN2916LB性能特点、内部结构和设计考虑,同时给出了由UDN2916LB组成的双步进微型打印机电机应用电路。
关键词:UDN2916LB,双步进微型打印机引言:随着国家“金税”工程进一步推进, 2005年近百家企业取得税控收款机生产许可证,容量达3000万台的税控市场即将井喷。
据估计大约三分之一税控收款机市场将安装双步进微型打印机来打印发票。
控制该类型步进电机驱动芯片UDN2916LB市场应用将极为广泛。
原理介绍:UDN2916LB是一款能够驱动双绕组双极步进电机的IC。
适用的电机电源电压范围为10V-45V,逻辑电源电压不能超过7V;通过内部脉宽调制控制器(PWM)实现750mA的输出电流;同时还具有例如:内置1/3和2/3分割器,通过逻辑输入实现1-phase/2-phase/W1-2phase激励模式,内置过热和交叉电流保护功能,集成钳制二极管,内置防止低压误操作保护功能。
UDN2916LB内部结构如下图:芯片有两组电路构成,每组电路由PWM控制器、电桥及辅助电路组成。
见图11,PWM电流控制电路:每个PWM控制器由一组电桥、及其外部一个感应电阻(Rs)、一个内部比较器和一个单稳多谐振荡器组成,来独立感应和控制输出电流。
见图2当电桥导通时,电机线圈中电流开始增大,电流通过外部感应电阻产生的感应电压也在增大,当感应电压达到比较器输入端设定电压值时,线圈中电流ITRIP = VREF/10 RS ,比较器此时触发单稳态关闭电桥的源驱动。
由于内部逻辑和转换开关的延迟会导致实际负载电流峰值稍高于理论值,这种延迟(td)典型值为2µs。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
随着工业和家电领域、玩具马达及机器人市场的需求持续稳定成长,步进电机驱动控制芯片得到越来越广泛的应用。
步进电机驱动芯片是集成有CMOS 控制电路和DMOS 功率器件的芯片,利用它可以与主处理器、电机和增量型编码器构成一个完整的运动控制系统。
可以用来驱动直流电机、步进电机和继电器等感性负载。
步进电机驱动分电压型和电流型两种,那它们之间有什么区别呢?如何判断驱动芯片是电压型的还是电流型的?
1、电压型
直流电路采用电容器滤波。
在波峰(电压较高)时,由电容器储存电场能,在波谷(电压较低)时,电容器将释放电场能来进行补充,从而使直流电压保持平稳。
直流电路是一个电压源,故称为电压型。
2、电流型
直流电路采用电抗器滤波。
在波峰(电流较大)时,由电抗器储存磁场能,在波谷(电流较小)时,电抗器将释放磁场能来进行补充,从而使直流电流保持平稳。
直流电路是一个电流源,故称为电流型。
步电机系统解决方案
由于负载一般都是感性的,它和电源之间必有无功功率传送,因此在中间的直流环节中,需要有缓冲无功功率的元件。
如果采用大电容器来缓冲无功功率,则构成电压源型变频器;如采用大电抗器来缓冲无功功率,则构成电流源型变频器。
深圳市维科特机电有限公司成立于2005年,是步进电机产品的销售、系统集成和应用方案提供商。
我们和全球产品性价比高的生产厂家合作,结合本公司专家团队多年的客户服务经验,给客户提供有市场竞争力的步进电机系统解决方案。
我们的主要产品有信浓(SHINANO KENSHI)混合式步进电机、日本脉冲(NPM)永磁式步进电机、减速步进电机、带刹车步进电机、直线步进电机、空心轴步进电机、防水步进电机以及步进驱动器、减振垫、制振环、电机引线、拖链线、齿轮、同步轮、手轮等专业配套产品。
我们还供应德国TRINAMIC驱动芯片和日本NPM运动控制芯片。
根据客户配套需要,我们还可以提供其他种类及其他品牌微电机产品的配套服务。
也提供NPM的线性磁轴电机(直线电机)及技术支持和服务。
步电机系统解决方案。