TMC262步进电机驱动芯片
东芝最新步进电机驱动芯片TB6600HQ-HG
TOSHIBA BiCD Integrated Circuit Silicon Monolithic
TB6600HQ
PWM Chopper-Type bipolar Stepping Motor Driver IC
TB6600HQ
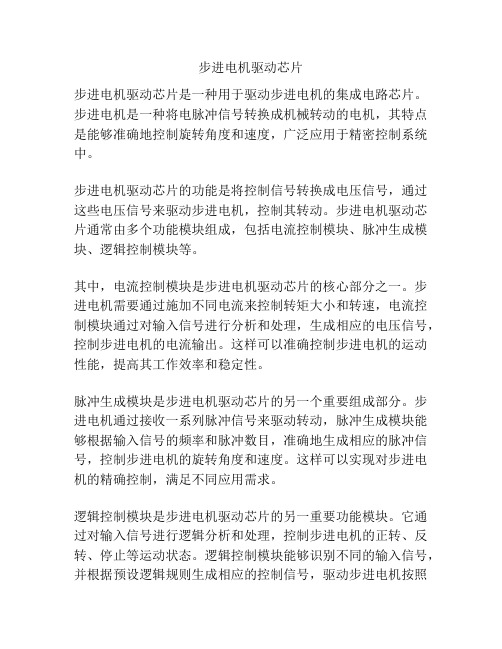
The TB6600HQ is a PWM chopper-type single-chip bipolar sinusoidal micro-step stepping motor driver. Forward and reverse rotation control is available with 2-phase, 1-2-phase, W1-2-phase, 2W1-2-phase, and 4W1-2-phase excitation modes. 2-phase bipolar-type stepping motor can be driven by only clock signal with low vibration and high efficiency.
Input circuit
Vreg 24
Reg(5V)
MO ALERT
25
1
VCCA 20
Pre -drive
H-Bridge driver A
TSD / ISD / UVLO
Current selector circuit A
Pre -drive
H-Bridge driver B
OSC 23
Vref
IO (PEAK) 5.0/phase (Note 1) A
Drain current (ALERT, DOWN) Input voltage Power dissipation Operating temperature Storage temperature
步进电机驱动芯片有哪些_六款步进电机驱动芯片
步进电机驱动芯片有哪些_六款步进电机驱动芯片步进电机基本原理工作原理:通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。
该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。
当定子的矢量磁场旋转一个角度。
转子也随着该磁场转一个角度。
每输入一个电脉冲,电动机转动一个角度前进一步。
它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。
改变绕组通电的顺序,电机就会反转。
所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
发热原理:通常见到的各类电机,内部都是有铁芯和绕组线圈的。
绕组有电阻,通电会产生损耗,损耗大小与电阻和电流的平方成正比,这就是我们常说的铜损,如果电流不是标准的直流或正弦波,还会产生谐波损耗;铁心有磁滞涡流效应,在交变磁场中也会产生损耗,其大小与材料,电流,频率,电压有关,这叫铁损。
铜损和铁损都会以发热的形式表现出来,从而影响电机的效率。
步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的频率也随转速而变化,因而步进电机普遍存在发热情况,且情况比一般交流电机严重。
步进电机用途步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
步进电机分类1、步进电机结按构分类步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
TMC262硬件寄存器手册(中文)

TMC262寄存器手册(中文)
关于TMC262全部写配置寄存器的一览表如表一所示:具体的包含5个寄存器:驱动控制寄存器(DRVCTRL)、斩波器控制寄存器(CHOPCONF)、智能控制寄存器(AMARTEN,也为COOLSETP)、负载监控控制寄存器(SGCSCONF)、控制配置寄存器(DRVCONF)。
表一
1、Driver Control Register (DRVCTRL) 驱动控制寄存器
它这里主要分为2种模式SETP/DIR模式与SPI模式,而这2中模式的选择取决于:控制配置寄存器中的:SDOFF mode bit。
2、Chopper Control Register (CHOPCONF) 斩波控制寄存器
3、coolStep Control Register (SMARTEN)智能控制寄存器
4、stallGuard2 Control Register (SGCSCONF) 负载监控控制寄存器
5、Driver Control Register (DRVCONF) 驱动配置寄存器
6、Read Response 读响应寄存器。
TMC262_V1.2
TMC262步进电机驱动器步进电机驱动器使用使用使用说明说明说明书书TMC262智能步进电机驱动器是创易电子采用德国TMC262智能步进电机驱动IC 开发出的一款通用型两相步进电机驱动器,具有如下特征:1、智能检测步进电机负载状态,及时调整驱动电流,极大的提高了效率,大大降低了驱动电流,降低了发热量,42、57电机可以不需要散热器,极大的缩小了体积。
2、不带散热器下最大驱动电流可达3A ,带散热器驱动电流可达6A ,细分数初始可设为1、2、4、8、16、32、64、128等值,可定制为2、4、8、16、32、64、128、256等值 。
3、可采用雷普导轨式安装壳体,在工业环境安装更方便。
一、接线脚位定义如下:如图1所示:1、2分别接电机A+(BMA1)和A-(BMA2);3接电源+(默认为工业用电VDD24V,最大电压40V);4接电源地(GND);5、6分别接电机B+(BMB1)和B-(BMB2);7为COM+接口,我们接VDD24V;8为外部脉冲输入(PU);9为方向控制(DR);10为使能端(MF)。
注意注意::外部控制中外部控制中,,COM+COM+必须必须必须在在外接电源外接电源的的情况下MF MF、、DR DR、、PU 输入输入控制控制控制才有效才有效才有效,,COM+COM+不外接电源不外接电源MF MF、、DR DR、、PU 输入输入控制控制无效无效。
图1二、拨码开关定义如下:如上图所示:产品共用两个4位拨码开关分别命名为拨码开关1、拨码开关2。
拨码开关以二进制计数,向下为0,向上(ON端)为1,拨码开关1为电流调节,4位分为16等份,全部向下时为1,电流最小(0.5A),全部向上时为16,电流最大(8A)。
每加一等份电流增大:8A/16等份=0.5A。
拨码开关2分为两部分,第一部分是第1位,为自检位,开关拨到ON时为内部给脉冲,所以只要把电机的线分别对应接上,电源接上,电机就可正常工作;拨到OFF时为外部控制,只有把电机、电源、COM+分别接上,还得在PU外加脉冲时(脉冲电平24V),电机才会转动。
TMC262数据手册性能
原理框图
电机驱动:
步进和方向控制: 序列发生器和 SPI 通过斩波的方式实现电机控制 两种控制方案:1 为步进和反向控制脉冲的控制方式 2 为通过 SPI 配置参数的方式 控制和诊断寄存器给改变电机条件和修改电机状态带来了灵活性
内部集成了正弦和余弦发生器,在接收一个脉冲后,运动一个微步距,从而实现
8,17
I
采样电阻输入
5VOUT
9
SDO,SDI SCK,CSN
CLK
VHS VS TST_ANA SG_TST GNDP
VCC_IO
DIR STEP TST_MODE
10,11 12,14
16
24 25 26 27 28
29
30 31 32
内部线性调整管,这个电压用来作
为低端驱动和内部模拟电路的供
寄存器介绍如下:
DRVCTRL 有两个功能,取决于 SDOFF(DRCGOF_7),当 SDOFF=1 时,用于 SPI 模
式下配置驱动器的电流,在 SDOFF=0 时用于 STEPDIR 模式时,做使能和微步精度
的配置。寄存器的使用如下图。
SDOFF=1:
DRVCTRL
Write OXXX,SDOFF=1
每个斩波周期,电机电流通过采样电压和设定值进行比较。这种方案可以满足高
动态需求,从而实现了快衰减和过零的保障。衰减周期可以设置,过零可以通过
编程得到改善。
无感负载检测
高精度负载测量,无需外置传感器实现电机的机器负载,负载的测量明显减小了
机器的功耗,从而使驱动器散热得到改善,提高了驱动器精度和降低了功耗。
2
CB2
1
CB1
0
CB0 B 相电流配置最低位
步进电机驱动芯片
步进电机驱动芯片步进电机驱动芯片是一种用于驱动步进电机的集成电路芯片。
步进电机是一种将电脉冲信号转换成机械转动的电机,其特点是能够准确地控制旋转角度和速度,广泛应用于精密控制系统中。
步进电机驱动芯片的功能是将控制信号转换成电压信号,通过这些电压信号来驱动步进电机,控制其转动。
步进电机驱动芯片通常由多个功能模块组成,包括电流控制模块、脉冲生成模块、逻辑控制模块等。
其中,电流控制模块是步进电机驱动芯片的核心部分之一。
步进电机需要通过施加不同电流来控制转矩大小和转速,电流控制模块通过对输入信号进行分析和处理,生成相应的电压信号,控制步进电机的电流输出。
这样可以准确控制步进电机的运动性能,提高其工作效率和稳定性。
脉冲生成模块是步进电机驱动芯片的另一个重要组成部分。
步进电机通过接收一系列脉冲信号来驱动转动,脉冲生成模块能够根据输入信号的频率和脉冲数目,准确地生成相应的脉冲信号,控制步进电机的旋转角度和速度。
这样可以实现对步进电机的精确控制,满足不同应用需求。
逻辑控制模块是步进电机驱动芯片的另一重要功能模块。
它通过对输入信号进行逻辑分析和处理,控制步进电机的正转、反转、停止等运动状态。
逻辑控制模块能够识别不同的输入信号,并根据预设逻辑规则生成相应的控制信号,驱动步进电机按照特定的运动模式进行工作。
步进电机驱动芯片具有小巧、高集成度、低功耗等优点,使得步进电机的控制更加便捷和灵活。
它广泛应用于数控机床、机器人、自动化设备等领域,为这些领域的精密控制提供了可靠的解决方案。
随着科技的不断发展,步进电机驱动芯片也在不断创新与提升。
目前,一些步进电机驱动芯片采用了闭环控制技术,能够实时检测电机的位置和速度信息,提高步进电机的定位精度和动态响应性能。
此外,一些步进电机驱动芯片还具备了多种保护功能,如过流保护、过热保护等,避免步进电机因异常工作而受损。
综上所述,步进电机驱动芯片是一种广泛应用于精密控制系统中的集成电路芯片,能够准确地控制步进电机的旋转角度和速度。
基于tmc262的两相步进电机驱动控制器设计

基于TMC262的两相步进电机驱动控制器设计Design of Two-phase Stepper Motor DriveController Based on TMC262何正伟翁%信作者(长江大学电子信息学院,湖北荆州434023)[摘要]步进电机作为一种感应式直流电机,具有操作简单,功率低等特D,被广泛应用在工业生产中。
本文设计了一款基于TMC262的两相步进电机驱动控制器,集成了RS-485现场总线,采用Modbus-RTU通信协议与上位机通信。
[关键词]STM32;TMC262;细分控制技术[中图分类号]TM932[文献标识码]B引言步进电机是将电脉冲信号,变为角位移或线位移的控制电机⑴,在非过载的情况下,电机的步距角和转速大小不受电压波动和负载变化的影响,也不受环境条件如温度、气压、冲击、振动等的影响,只与脉冲频率有关。
步进电机通常采用开环控制。
步进电机常见的驱动方式分为两种:1)以绕组电压为控制对象,如调频调压驱动、高低压驱动等方式;2)以绕组电流为控制对象,如恒流斩波驱动方式[2]$本次设计采用恒流斩波驱动方式来驱动电机,针对步进电机在工作过程中可能存在的失速、堵转、发热、振动等问题,提出了通过变速、细分控制技术等解决上述问题的方案$1系统总体设计本设计的系统框图如图1所示,主要由MCU 模块、通信模块、电机驱动模块、步进电机组成$根据生产需要,将参数通过通信模块发送到MCU,进而输出对应的脉冲、方向等命令给电机驱动,从而改变步进电机运动状态$图1系统框图2驱动模块设计驱动模块采用德国专业电机运动控制芯片开发公司TRINAMIC推出的TMC262作为步进电机驱动器件$驱动模块的内部结构简图如图2所示$ TMC262是由TRINAMIC公司开发的一款高性能两相步进电机驱动芯片,集成了诊断和保护功能,同时还具有高分辨率微步进、无传感器机负载、负载率化和低振斩波DIR1NCool s tep 2xADCGate"DriverHSc-BM □—E+严+Vm QSTEP.VCC 10TMC262MCUCSN SCK .SPI control, Config & DiagsProtaction& DiagnosticsChopperV2 x Current ComparatorSine Table 4*256entry■ A stallGuard SG_TST图2驱动模块结构图操作。
基于ARM和TMC262的步进电机运动控制系统
基于ARM和TMC262的步进电机运动控制系统
刘虎;张仁杰;刘振;陈雷亮
【期刊名称】《仪表技术与传感器》
【年(卷),期】2015(000)010
【摘要】介绍了一种高精度高可靠步进电机驱动控制系统的设计.该运动控制系统主要采用了STM32F10ZET6微控制器、TMC262步进电机驱动芯片.系统具有256细分的高精度步进,并具有电机过载检测、堵转报警等功能.给出了硬件设计的框图,介绍了驱动电路的设计,分析了TMC262电流斩波原理和TMC262负载检测原理.在基于MODBUS通讯协议上设计了友好的PC上位机通信软件,测试结果表明所设计的控制系统达到了预期的设计效果和要求.
【总页数】4页(P57-59,63)
【作者】刘虎;张仁杰;刘振;陈雷亮
【作者单位】上海理工大学光电与计算机工程学院,上海200093;上海理工大学光电与计算机工程学院,上海200093;上海理工大学光电与计算机工程学院,上海200093;上海理工大学光电与计算机工程学院,上海200093
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于AVR单片机和LabVIEW的丝杆步进电机运动控制系统 [J], 杨美程;杨益钧;丁宁
2.基于步进电机和TC4520的双目标运动控制系统设计 [J], 任立博;刘峰;程为彬
3.基于STM32和THB6064H的步进电机运动控制系统设计 [J], 刘必旺;陆晓昌
4.基于STM32和THB6064H的步进电机运动控制系统设计 [J], 刘必旺;陆晓昌;
5.基于TMC262的两相步进电机驱动控制器设计 [J], 何正伟; 翁惠辉
因版权原因,仅展示原文概要,查看原文内容请购买。
步进驱动器升级说明2

输出电流:3A 最大细分数:200(4 万步)
二相混合式 额定电压:AC(24-40)V
输出电流:5A 最大细分数:200(4 万步)
二相混合式 额定电压:AC(40-60)V
输出电流:5A 最大细分数:200(4 万步)
二相混合式 额定电压:AC110V
输出电流:6A 最大细分数:200(4 万步)
机身:177×122×75 四点立装 187×50
北京欣斯达特数字科技有限公司 北京斯达微步控制技术有限公司
Microstep
MS/SH 系列升级为 M 或 T 系列驱动器说明
ቤተ መጻሕፍቲ ባይዱ
产品的质量和性能是企业的生命,随着电子技术的发展及我们的努力,MS/SH 系列二相和三相混合式步进电机 驱动器即将升级为 M 或 T 系列。M 系列驱动器采用和 MS/SH 系列相同的控制原理,但可靠性和功能上都有很大的 提高,所以 M 系列能更好的替换原有的 MS/SH 系列;T 系列采用了更高级的控制算法,控制电机电流更加精细、 电机噪声更小、驱动器的发热量更小,缺点是你的采购成本略有增加,由于和原系列采用不同的控制算法,所以电 机的固有共振频率可能会不同,这点在替换时请注意。新系列和老系列在安装尺寸上略有不同,我们深表歉意。
机身及安装尺寸 mm 机身:122×76×31
二点平装或立装 安装间距:115
机身:157×99×56 二点立装 148
机身:177×122×75 四点立装 187×50
机身:177×122×75 四点立装 187×50
MS-3H057M MSa-3H057M
已停产
TX-3H504D
三相混合式 额定电压:DC(24-40)V 输出电流:5.2A 有效值 最大细分数:300(6 万步)
中科微(禾润)马达驱动IC及音频功放IC选型手册-无

输出功率 耳机 输出
--马达驱动IC & 音频功放IC
关断 电平 典型封 装 应用范围 备 注 市场类似
HT8792
7.0W、 AB/D类 单通道、内置 BOOST升压、数 2.5~5.5V 字音量控制、 防破音功能 11W、AB/D类单 通道、32阶数 3.0~9.0V 字音量控制、 防破音功能 D类双声道、防 削顶失真、静 2.5~6.5V 音功能、免滤 波器 D类单声道、数 字音量控制、 超低EMI、防削 2.2~5.5V 顶失真、免滤 波器 D类双声道、超 低EMI、防削顶 2.2~5.5V 失真、静音功 能、免滤波器 D类双声道、静 音功能、防削 顶失真、数字 2.2~5.5V 音量控制、超 低EMI、免滤波 器 D类双声道、低 EMI、防削顶失 2.2~6.0V 真、静音功能 、免滤波器
HT6828
2×4.7W/4 Ω
--
L
SOP16L
--
HT6879
3.5W/4 Ω
--
L
MSOP10L- 便携式音箱 专利技术国 PPMSOP10 、蓝牙音箱 际领先超低 L 、PAD EMI
HT6818
2×3.3W/4 Ω
--
L
TSSOP20L 便携式音箱 国际领先超 -PP 、蓝牙音箱 低EMI专利 SOP16L 、PAD 技术
功能
MAX7456 / IA6464
MAX7456 / IA6464 / AT7456
刷 式 直 流 驱 动
Allegro
步 进 电 机 驱 动 / 方 向 接 口 & 串 行 接 口
STEP/DIR
2
FULL~
1/16
2A
3轴步进电机控制芯片-TMC428目前许多设备上需要用到多个电机的

3轴步进电机控制芯片-TMC428目前许多设备上需要用到多个电机的控制,在设计开发过程中自然会增加开发难度,而且难度随着控制轴数的增多而增大。
TMC428是TRINAMIC公司开发的3轴步进电机控制芯片,它可以减少外围电路,减少电机控制软件设计的工作量,降低开发成本,缩短研发时间。
TMC428具有系统所需的所有运动控制功能,以其为核心控制3个TMC2X6或TMC2X9(该公司的驱动芯片)构成3轴步进系统的控制和驱动功能,该控制系统具有体积小,结构简单,内部可构成虚拟闭环等许多优点。
IO部分可以由其上位的微控制器来实现。
1.主要性能TMC428是小尺寸、高性价比的二相步进电机控制芯片。
它带有二个独立的SPI口,可分别与微处理器和带有SPI接口的步进电机驱动器相连以构成完整的系统。
其控制指令可由微处理器通过SPI接口给定。
TMC428提供了所有与数字运动控制有关的功能,包括位置控制、速度控制及微步控制等步进电机常用的控制功能。
这些功能如果让微处理器来完成,则需占用大量的系统资源,所以它的使用可将微处理器解放出来,以把资源用在接口的扩展和对步进电机的更高层次的控制上。
此外,TMC236也是TRINAMIC 公司开发的带有串行接口的步进电机驱动器。
3个TMC236连结构成的菊花链(Daisychain)结构便是一种基于串行通讯的网络结构,可以使多个具有串行通信接口的设备以接力的方式传递数据。
TMC428可以通过SPI接口与它们相连接,以同时控制3个二相步进电机。
TMC428的主要特点如下:●可以控制多达3轴的2相步进电机而且各轴之间可以独立运行●与微控制芯片和驱动芯片通过简单的SPI通讯,使用简单,便于构成虚拟的闭环网络,控制器可以时刻得知驱动器的状态●内有24bit位置计数器●根据微处理器给定的电机运动参数(位置,速度、加速度),依照梯形或三角形的速度由线产生驱动脉冲波形和顺序,来对电机进行位置和速度控制。
msOS简要说明
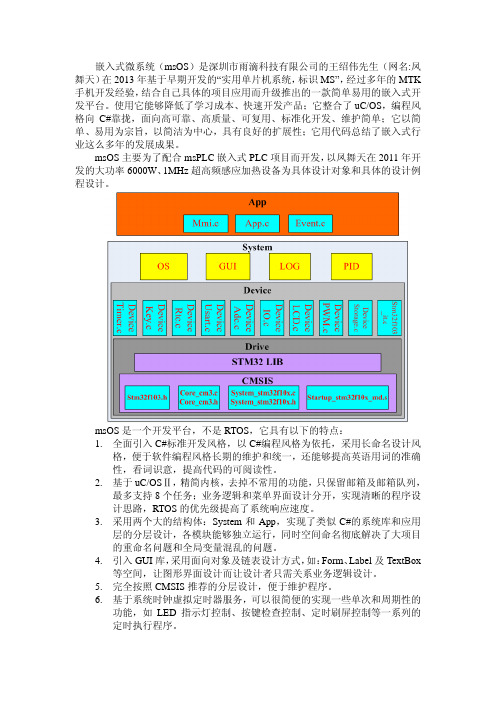
嵌入式微系统(msOS)是深圳市雨滴科技有限公司的王绍伟先生(网名:凤舞天)在2013年基于早期开发的“实用单片机系统,标识MS”,经过多年的MTK 手机开发经验,结合自己具体的项目应用而升级推出的一款简单易用的嵌入式开发平台。
使用它能够降低了学习成本、快速开发产品;它整合了uC/OS,编程风格向C#靠拢,面向高可靠、高质量、可复用、标准化开发、维护简单;它以简单、易用为宗旨,以简洁为中心,具有良好的扩展性;它用代码总结了嵌入式行业这么多年的发展成果。
msOS主要为了配合msPLC嵌入式PLC项目而开发,以凤舞天在2011年开发的大功率6000W、1MHz超高频感应加热设备为具体设计对象和具体的设计例程设计。
msOS是一个开发平台,不是RTOS,它具有以下的特点:1.全面引入C#标准开发风格,以C#编程风格为依托,采用长命名设计风格,便于软件编程风格长期的维护和统一,还能够提高英语用词的准确性,看词识意,提高代码的可阅读性。
2.基于uC/OSⅡ,精简内核,去掉不常用的功能,只保留邮箱及邮箱队列,最多支持8个任务;业务逻辑和菜单界面设计分开,实现清晰的程序设计思路,RTOS的优先级提高了系统响应速度。
3.采用两个大的结构体:System和App,实现了类似C#的系统库和应用层的分层设计,各模块能够独立运行,同时空间命名彻底解决了大项目的重命名问题和全局变量混乱的问题。
4.引入GUI库,采用面向对象及链表设计方式,如:Form、Label及TextBox等空间,让图形界面设计而让设计者只需关系业务逻辑设计。
5.完全按照CMSIS推荐的分层设计,便于维护程序。
6.基于系统时钟虚拟定时器服务,可以很简便的实现一些单次和周期性的功能,如LED指示灯控制、按键检查控制、定时刷屏控制等一系列的定时执行程序。
为了能够更好的普及和学习msOS,深圳市雨滴科技有限公司专门配套开发两套硬件DEMO板:msPLC DEMO和 msOS TMC262 DEMO。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机驱动芯片-TMC262
德国TRINAMIC推出史上功能最强步进电机驱动芯片-TMC262
TMC262可以精确、巧妙、随机动态地控制管理驱动芯片输入到电机的电流,即TMC262可以根据电机不同负载需求轻松自如地增加或减少其所输出电流,此功能在大大降低步进电机丢步概率的同时可以减少功率消耗该系列芯片也被称为绿色芯片,很好解决了由于功率过剩而产生的热量,从而可以较少电机和驱动器的发热量。
◆自带256高细分
◆支持step/dir控制信号输入;也支持20BitSPI接口控制
◆带有专利技术stallguard功能可以实现无需传感器精确测试电机负载
◆带有专利技术coolstep可以根据电机的负载自动调节驱动芯片输出的电流,避免因为超载而丢步,也减少电机的发热量,和其他驱动芯片相比节省75%的能量
◆内部自带256细分可以实现在低速时候平滑控制
◆最大驱动电流6A,驱动电压60V
◆高速驱动能力,可以驱动普通的2相步进电机达到5000RPM
◆集成过流,短路,过温等保护与诊断功能。