矿井提升机控制系统的现状与理论基础
矿井提升机控制技术研究现状与发展

矿井提升机控制技术研究现状与发展在我国煤炭开采企业的发展进程中,矿井提升机的应用比较普遍,在保证矿井安全生产方面发挥着不可代替的作用。
煤炭开采是一项较为特殊的工作,机械在使用过程中容易出现磨损,再加上操作不到位等状况,造成提升机容易出现故障,因此有必要加强对矿井提升机控制技术的研究应用,只有这样才能够在越来越严峻的煤炭开采事业中充分发挥其矿井提升机的优势。
基于此,本文就矿井提升机控制技术进行了分析。
标签:矿井提升;机控制技术;研究现状;发展引言矿井提升机是煤矿、有色金属矿中的重要运输设备,主要负责矿石提升、人员运送、物料下放等工作,就当前我国煤炭开采工作中的矿井提升机应用现状来看,其具有容量大、能耗大、安全稳定等特点,而且基于周期性运转的特向,矿井提升机的电动机需要频繁的启动、制动和反向作业,故障隐患大幅度提升,有必要加强对其控制技术的研究分析,并明确其创新发展对策。
一、矿井提升机控制技术发展现状(一)国外矿井提升机控制技术发展现状二十世纪七十年代,国外的一些发达国家在矿井提升机的机械部分和电气部分已经实现了技术上的进步,具体表现在机械部分使用的减速机电动机到直流慢速电动机到后来的悬臂安装直接传动的电动机的应用。
随着计算机的进步发展,在机电控制方面也开始利用可编程控制器(PLC)来优化矿井提升机操作,而且操作的安全性以及稳定性都得到了较大的提高。
近几年,计算机技术发展迅速,通过计算机技术以及PLC的结合使用能够有效促进矿井提升机控制技术的发展水平。
(二)国内矿井提升机控制技术发展现状我国的煤炭开采事业发展时间较长,但是矿井提升机控制技术的应用起步时间比较晚,具体是在1958年才开始使用了在地表和井下不断进行往复运行的提升机,在此基础上使用的提升机具有耗电大、控制系统复杂等却缺点。
随着我国科学先进技术的发展进步,矿井提升机控制技术也得到了长足的进步,计算机技术以及PLC技术的引入也进一步增加了提升机的安全性和可靠性。
矿井提升机自动化控制系统的研究与应用
节能减排
自动化控制系统能够实现 能源的优化利用,降低能 源消耗和排放,符合绿色 发展理念。
自动化控制系统在矿井提升机中面临的挑战
技术难度高
矿井提升机工作环境恶劣,技术 难度较高,需要具备较高的技术 水平和经验。
设备维护困难
01
安全保护策略
如速监控、过载保护、防滑保护 等,确保提升机运行安全。
紧急制动系统
在紧急情况下,自动触发制动系统 ,确保设备和人员安全。
03
02
故障诊断与处理
对异常情况进行实时监测和诊断, 采取相应措施进行处理。
安全防护装置
如防护栏、安全门等,防止人员误 操作和意外伤害。
04
03
矿井提升机自动化控制系统
发展方向二
未来自动化控制系统将更加注重环保和节能,通过优化控制算法和降低能耗, 为矿山的可持续发展做出贡献。
04
矿井提升机自动化控制系统
的优势与挑战
自动化控制系统在矿井提升机中的优势分析
01
02
03
提高生产效率
自动化控制系统能够实现 快速、准确的提升机控制 ,减少人工干预,提高生 产效率。
降低安全风险
发展趋势
随着技术的不断进步,矿井提升机自动化控制系统将进一 步向着智能化、网络化、安全可靠的方向发展,实现更加 高效、安全的生产目标。
对未来研究的展望
1 2
技术研发
未来研究应进一步探索新的传感器技术、信号处 理方法和控制算法,提高系统的性能和适应性。
系统集成
加强与其他矿井自动化系统的集成,实现矿井的 全面智能化管理,提高生产效率和安全性。
2023年矿井提升设备行业市场分析现状

2023年矿井提升设备行业市场分析现状矿井提升设备行业市场分析现状矿井提升设备是煤矿等矿山行业的重要设备之一,用于将煤炭、矿石等物料从井下提升至地面。
随着矿山行业的发展,矿井提升设备市场也得到了迅猛的发展。
目前,矿井提升设备市场呈现以下几个特点和现状:1. 需求稳定增长:矿井提升设备是矿山行业的必需品,其需求主要受到市场煤炭需求和矿山开采活动的影响。
随着能源需求的不断增长和矿山规模的扩大,矿井提升设备市场的需求也在稳步增长。
2. 技术升级与创新:随着科技的发展,矿井提升设备在技术上不断创新和升级。
例如,现代矿井提升设备采用液压系统、电气控制等新技术,使得设备的性能更加稳定可靠、操作更加方便高效,提高了运行效率和安全性能。
3. 大型化和自动化趋势:为了提高矿井提升设备的运输能力和效率,越来越多的矿山开始采用大型化和自动化的提升设备。
大型化的矿井提升设备可以一次性提升更多的物料,提高了矿山的生产能力;自动化的矿井提升设备能够实现远程控制和监测,降低了人力投入和劳动强度。
4. 市场竞争激烈:矿井提升设备市场竞争激烈,国内外的大型矿山设备制造企业都在争夺市场份额。
国内的矿井提升设备制造企业主要集中在河北、山东、河南等煤矿资源丰富的地区。
全球的矿井提升设备市场主要由德国、美国、日本等发达国家的制造企业主导。
5. 绿色环保需求增加:随着全球对环境保护意识的提高,矿井提升设备市场也面临着绿色环保的压力。
矿井提升设备制造企业需要加大对设备的节能、减排等环保技术的研发和应用,以满足市场的需求。
6. 国家政策的影响:国家对矿山行业的监管和政策也对矿井提升设备市场产生了重要影响。
政府对安全生产、环境保护等方面的要求越来越高,矿井提升设备制造企业需要遵守相关政策和标准,提高产品质量和安全性能。
总的来说,矿井提升设备市场的发展前景良好,但也面临着一些挑战和问题。
制造企业需要抓住市场需求,加强技术创新和产品升级,提高设备的性能和竞争力。
矿井提升控制系统的发展与现状
矿井提升控制系统的发展与现状矿井提升系统是矿井生产中极其重要的环节,它的正常运行与否直接影响到矿井的产量。
对于提升机传动方式的选择,必须在满足矿井生产工艺要求即满足各种可能出现的运行速度图的前提下,对各种可能的传动方案进行技术比较后,选择最合理的一种传动方式。
我国在20世纪50~60年代,一般采用交流传动方式。
交流传动的最大优点是:技术比较简单,设备及安装费用低,占地面积小,运行维护容易。
但它的最大缺点是:电气调速性能差,在减速和爬行阶段需要另外增设传动装置,如动力制动、低频传动以及晶闸管窜级传动等,虽然调速性能得到了改善,然而设备投资和系统的复杂性也增加了。
由于交流传动受主电动机和控制设备制造容量的限制,所以,对要求提升容量的、速度高的大型矿井,一般采用直流传动制造。
我国进入20世纪70年代后,矿井的规模愈来愈大,年设计生产能力为300万t、400万t、500万t,甚至更大。
特别是对于一些井深600m以上的矿井,要求装载容量大、提升速度高,箕斗容量从12t、18t、增大到32t,提升速度从6m/s、8m/s提高到14m/s,甚至还高,对于提升自动化的水平要求也愈来愈高,因此,原来的交流传动已远远不能满足要求,必须采用直流传动方式。
直流传动的最大优点是:调速平滑稳定,调速范围宽,容易实现提升自动化。
因为电动机的转速几乎与提升负载无关,在低速范围内也能稳定运行。
负力减速时可将机械能转换为电能返回电网。
它的缺点是建设投资大,基础费用高。
直流传动方式又分为发电机-电动机传动和晶闸管变流器-电动机传动两种,两者比较,晶闸管变流器-电动机传动又具有动作速度快、可靠性高、维护工作量小、故障少、运行效率高、体积小、重量轻和占地面积小等优点。
它的缺点是对交流电网的无功冲击大,,因而产生较大的启动压降;它的高次谐波会引起交流电网电压正弦波形的畸变,干扰其他用电设备;运行功率因数低;等等。
但如对变流器采取特殊接线方式,电枢回路用两组晶闸管桥窜联,才用“顺序控制”方法可以提高功率因数,特别是系统中配置无功补偿和谐波吸收装置后,将大大消弱晶闸管整流装置对交流电网的无功冲击和谐波污染,为此,晶闸管交流变流器供电的直流传动装置具有广阔的前景。
论文12矿井提升机电控系统原理设计
矿井提升机电控系统原理设计摘要我国矿井提升机大多是采用交流异步电机拖动,其电气控制系统采用转子串、切电阻调速,由继电器-接触器构成逻辑控制装置。
本文以安全、可靠、高效、经济为出发点,以可靠性原则为依据,对矿井交流提升机电控系统进行研究设计,由可编程控制器(PLC)代替继电器-接触器构成的逻辑控制装置。
其中简单介绍了国内外矿井提升机发展概况,提升机机械结构、工作原理,分析了其技术经济性。
对于PLC的控制原理及应用做了一般性的介绍。
详述了提升机电控系统和调速原理,如:测速部分和保护部分。
本文以TKD-NT 单绳缠绕式矿井提升机为例,提出了研究设计方案,并且在实践中成功实施。
PLC电控系统实现了对提升过程的程序控制,精度高;实现了速度、电流以及矢量的数字交换等,对提升机进行闭环调节;实现行程、速度等重要参数及提升状态的监视;实现无触点控制,寿命长,可靠性大大提高,具有良好的控制监视系统;实现了显示、记录等有关数据的全部自动化。
关键词:矿井交流提升机,PLC,调速,电控技术研究THE DESIGN OF ELECTRIC CONTROL SYSTEMBASED ON MINE ELEVATORABSTRACTIn China, mine elevator whose electric control system uses speed regulation by means of stringing and slicing the rotor resistance, and it constitutes the logic control device by the relay and contactor adopting the means of the drive of AC asynchronous motor in most cases. This paper which studies and designs the electric control system of AC mine elevator, adopting PLC which takes the place of the logic control device constituted by the relay and contactor takes the security, reliability, high efficiency, economy as a starting point, and takes the reliability principle as the basis. There into, this paper gives a brief introduction on the development of mine elevator in home and abroad, its framework and theory, while doing some economic study. Then, it introduces the theory and application of PLC simply. On the side, it goes into particulars about electric control system, for example, speed measurement and safeguard. This paper sets TKD-NT elevator for an example, proposes the research and design plan which puts in practice successfully. The electric control system based on PLC has carried out the procedure control of hoist process and high accuracy, closed-cycle control of mine elevator through speed, electric current as well as digital switching of vector and so on, the monitor of important parameters such as the distance of travel, speed, the state of hoist. In addition, the system also has carried out contact less control, long life-span, reliability greatly improved, good control supervisory system and completely automation of relevant data’s demonstration, recording and so on.KEY WORDS: AC mine elevator, PLC, speed regulation, electric controltechnology research目录前言 (1)第1章国内外矿井提升机发展概述 (2)§1.1国外矿井提升机现状 (2)§1.2我国矿井提升机电气控制系统的现状 (2)第2章提升机机械结构及工作原理 (4)§2.1机械结构 (4)§2.2工作原理 (5)第3章串电阻调速系统 (7)§3.1串电阻调速系统原理 (7)§3.2串电阻调速程序 (8)第4章提升机电控系统构成 (14)§4.1引言 (14)§4.2主回路 (15)§4.3测速回路 (16)§4.4安全回路 (16)§4.5控制回路 (18)§4.5.1 信号回路 (18)§4.5.2 电机正反转回路 (18)§4.5.3 制动回路 (19)§4.5.4 转子电阻控制回路 (19)§4.6监控系统 (20)§4.6.1 上位机 (20)§4.6.2 操作台 (21)第5章PLC 操作主控系统原理及应用 (22)§5.1PLC系统组成 (22)§5.2各单元基本特点 (22)第6章技术经济性分析 (24)结论 (26)致谢 (27)参考文献 (28)前言矿井提升机常被人们称为矿山的咽喉,是矿山最重要的关键设备,是地下矿井与外界的唯一通道,肩负着矿石、物料、人员等的重要运输责任。
矿井提升机控制系统设计
矿井提升机控制系统设计矿井提升机是矿山生产过程中的重要设备,其控制系统设计的优劣直接关系到生产安全和生产效率。
本文将介绍矿井提升机控制系统设计的相关关键技术,并探讨优化方法。
矿井提升机控制系统主要包括电气控制系统和液压控制系统。
电气控制系统主要负责运行监测和故障诊断,而液压控制系统则承担着载荷控制和速度控制等功能。
为了确保提升机的安全与稳定,控制系统需满足高精度、快速响应、可靠性高等要求。
在控制系统的设计过程中,通常采用多种控制算法,如PID控制、模糊控制、神经网络控制等。
PID控制简单易行,但对参数调整要求较高;模糊控制能够处理不确定性和非线性问题,但计算复杂度较高;神经网络控制能够自适应地处理复杂的非线性过程,但训练时间较长,且对数据要求较高。
针对不同控制算法的优缺点,我们可以采用混合控制策略,将多种控制方法结合起来,实现优势互补。
例如,可以将PID控制和模糊控制相结合,或者将模糊控制和神经网络控制相结合,以提高控制系统的性能。
在控制系统设计中,还应充分考虑实时监控和故障诊断功能。
通过在系统中加入传感器和监测模块,实现对提升机运行状态的实时监测,及时发现并处理潜在问题,以避免事故发生。
为了提高系统的可靠性,应选择高可靠性、高稳定性的硬件设备,并加强系统的抗干扰设计。
矿井提升机控制系统设计是矿山生产中的重要环节,其优劣直接关系到矿山的安全生产和生产效率。
在设计中,应充分考虑系统的实际情况和需求,选择合适的控制算法和硬件设备,并加强实时监控和故障诊断功能,以实现提升机的安全、稳定、高效运行。
同时,随着科技的不断发展,应积极引入新的技术手段,对控制系统进行持续优化和改进,以适应不断提升的生产需求。
未来的研究可以从以下几个方面展开:进一步研究矿井提升机控制系统的动态特性和鲁棒性,以提高系统的适应性和稳定性。
针对矿井提升机运行过程中的复杂环境和恶劣条件,研究更加可靠、高效的故障诊断方法。
结合人工智能和大数据技术,实现提升机控制系统的智能化和自适应化,提高生产效率。
矿井提升机的现状和发展

矿井提升机的现状及发展矿井提升机是煤矿、有色金属矿中的重要运输设备,是“四大运转设备”之一。
矿井提升系统具有环节多、控制复杂、运行速度快、惯性质量大、运行特性复杂的特点,且工作状况经常交替转换。
虽然矿井提升系统本身有一些安全保护措施,但是由于现场使用环境条件恶劣,造成了各种机械零件和电气元件的功能失效,以及操作者的人为过失和对行程监测研究的局限性,使得现有保护未能达到预期的效果,致使提升系统的事故至今仍未能消除。
一旦提升机的行程失去控制,没有按照给定速度曲线运行,就会发生提升机超速、过卷事故,造成楔形罐道、箕斗的损坏,影响矿井正常生产,甚至造成重大人员伤亡,给煤矿生产带来极大的经济损失。
提升机电气控制系统在很大程度上决定了提升机能否实现平稳、安全、可靠地起制动运行,避免了严重的机械磨损,防止较大的机械冲击,减少机械部分维修的工作量,延长提升机械的使用寿命。
所以,提升机电气控制系统的研究一直是社会各届人士共同关注的一个重大课题。
随着矿井提升系统自动化,改善提升机的性能,以及提高提升设备的提升能力等的要求,对电气传动方式提出了更高的要求。
对矿井提升机电气传动系统的要求是:有良好的调速性能,调速精度高,四象限运行,能快速进行正、反转运行,动态响应速度快,有准确的制动和定位功能,可靠性要求高等。
而随着科学技术的进步和矿井生产现代化要求的不断提高,人们对提升机工作特性的认识进一步深化,提升设备及拖动控制系统也逐步趋于完善,各种新技术、新工艺逐步应用于矿井提升设备中。
特别是模拟技术、微电子技术、微电脑技术在提升机控制中的应用已成为必然的发展方向。
目前国内提升机电气传动系统现状:对于大型矿井提升机,主要采用晶闸管变流器—直流电动机传动控制系统和同步电动机矢量控制交一交变频传动控制系统。
这两种系统大都采用数字控制方式实现控制系统的高自动化运行,效率高,有准确的制动和定位功能,运行可靠性高,但造价昂贵,中小矿井难以承受。
矿井提升机电控系统的现状与发展趋势
整体而言,交流变频传动系统是矿井提升机传 动系统的主要发展方向,但在中等功率范围内,V - M 直流传动系统由于其良好的性价比,仍有广泛的 应用空间。同时,随着中压四象限变频技术的发展 成熟,中压变频技术必将在矿井提升机上得到更多
矿井提升机电控系统作为矿山现场设备的控制
随着企业的发展,生产的规模不断扩大,每个矿 系统,随着数字化矿山建设的发展,必将实现无人
山的矿井提升机的数量持续增多,生产任务不断加 化、网络化、远程化、自动化的特点,为矿山的安全、
重,而劳动力资源却在自然减员,迫切要求矿山对多 高效生产,提供强大的技术基础,为数字化矿山的建
高压电源二次回路的连锁和控制接点,输入到 提升机自动化控制系统即 PLC 系统进行操作控制, 便于远程集中控制和监测。同时提供过载、过压、过 流报警节点。 1. 2. 2 变压器
采用干式环氧树脂浇注式变压器,其数量与容 量根据矿井提升机电气传动方案的不同而不同( 见 表 1) 。
表 1 电气传动系统变压器配置数量
台提升机系统进行集中控制与管理,实现多台提升 设提供强大的物理基础。
机远程集中控制、机房无人值守,减少劳动力、增加 劳动效率,保 证 提 升 机 的 安 全 可 靠 运 行,对 矿 井 安 全、持续、高效生产,加快矿井生产系统的现代化进 程而言,将具有重要的实际意义与经济意义,是数字 化矿山的高级应用实例。
冯建民,等: 矿井提升机电控系统的现状与发展趋势
矿井提升机控制系统培训资料.pptx
矿井提升机控制系统的现状
v(m/s)
maxv
v2
v1
F(
t6
t(S)
F2 F'2
F1
F'1
F3
F5
F'3
F'5
t(S)
F4
F6
F'6
F'4
矿井提升机控制系统的现状
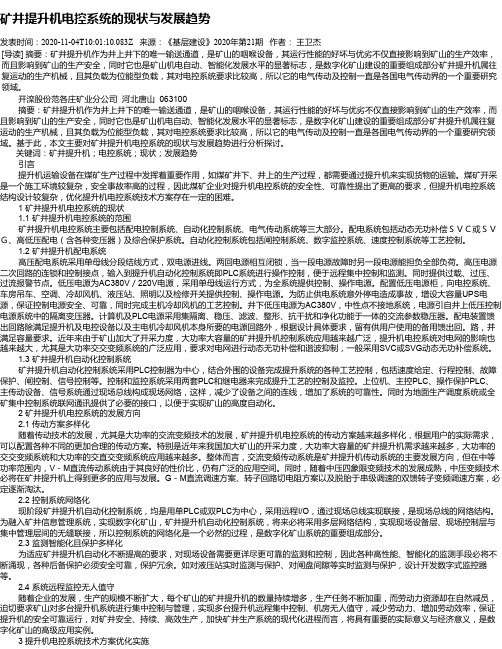
图中: 1、V1为初加速终了的速度,亦是箕斗出曲轨的速度,Vmax 最大速度,V2为爬行速度。 2、t1为初加速时间,t2为主加速时间,t3为等速段时间, t4为减速段时间,t5为爬行段时间,t6为机械抱闸时间。 3、力图实线是不带尾绳情况,虚线是带尾绳情况。
波形,在必要时要采用“顺序控制”,还可以采用谐波治 理来改善功率因数。
下图给出一个TKD控制方式的
。换向靠高压真空开
关改变进线高压相序,在减速段投入动力制动或是低频制
动,下图给出一个TKD控制方式的示意图。这种控制方式的
优点是结构简单,但缺点是显而易见的,主要表现在以下
几个方面。
(1)调速性能差,起动和减速运行特性出现阶梯式跳跃。
电
X1
源
X2
~6KV
备
进
X3
线
用
GLK1
高压真空换向柜 FC
GyD
继电器 控制保护柜
~380V
DFC
可控硅
低频电源装置
ZC
D1 D2
DXLC DZC D3
yD
测速发电机
接触器控制柜 金属电阻
矿井提升机控制系统的现状
(2)能耗特别大,消耗在电阻上的电能特别客观。 (3)速度不能平滑调节,因而对机械系统的冲击非常,
矿井提升机电控系统的现状与发展趋势
矿井提升机电控系统的现状与发展趋势0 引言矿井提升机又称为矿井卷扬机。
作为井上与井下的唯一输送通道,矿井提升机承担着人员、物料、设备和煤炭等的运输任务。
矿井提升机属往复运动的大型生产机械,它具有自身惯性大、载荷能力强,载荷及其变化也大、载荷性质属位能性负载、运行速度快、调速范围广等一系列的优点,矿井提升机运行的状况,关系着矿井的正常生产,而且还影响着矿井的设备安全和矿工的人身安全。
由于矿井提升机的生产工艺和安全性的要求越来越高,其机械制造技术和电气控制技术也就成为各国机械制造界和电气传动界的一个重要的研究课题。
随着高产高效矿井的迅速发展,更有利的促进了矿井提升机朝着大容量、大功率、高效率、高安全性、高可靠性、全数字化及综合自动化的方向深入发展。
1 矿井提升机控制系统的发展现状根据提升机对电控系统的要求,提升机的电气可分为直流传动和交流传动两大类。
直接传动即对直流电动机的速度控制。
直流电动机由于具有良好的调速特性、宽广的调速范围和易于实现四象限运行等优点,很适合在需要调速和频繁正反转的矿井提升机中作拖到应用。
随着电力技术的发展,特别是晶闸管的出现,对要求较高、容量较大或多水平开采的矿井,其提升机几乎都采用了晶闸管交流装置供电的直流电传动系统(V-M系统)。
但是直流电动机需要设置机械换向器和电刷,不仅需要经常维护,影响运行可靠性、而且电刷容易产生火花,限制了使用场所,特别是由于存在换向问题,难以制造出大容量、高转速、高电压的直流电动机来,使得目前3 000r/min左右的高速直流电动机,最大容量只能达到400kW~500kW;低速直流电动机只能做到两三千千瓦,已经越来越难适应现代矿井提升机向着高速大容量化发展的需要。
交流传动即对交流电动机的速度控制。
交流电机,尤其是笼型异步电动机,由于结构简单、制造方便、造价低廉、坚固耐用、无需维修、运行可靠,更可用于恶劣的环境之中,特别是能做成高速大容量,更适应在高速大容量的矿井提升机中作拖动应用。
矿井提升机电气控制系统的探讨
矿井提升机电气控制系统的探讨矿井提升机电气控制系统的探讨矿井提升机电气控制系统的探讨关键字:矿井;提升机;电气控制系统矿井提升机是矿井作业生产过程中重要的大型器具设备,即为在矿井顶部通道口与底部通道口中建立起的大型垂直升降机,用途为搬运煤矿,材料,人员和施工设备,是井上与井下的唯一通道。
所以其电力传递特性就非常复杂与重要,电动机的高频率正反转动与制动过程,经常处于过负荷运作,必须保证其正常稳定安全的工作,才能够保证工作人员的自身生命安全以及矿山的正常运作。
如若发生事故,往往为重大事故,发生人员死亡和矿山倒塌。
因此,升降梯正常工作的重要性就是首要关键,要求升降机本身部件符合安全标准,保证在出现事故时将损失降低要最小。
而后要求升降机能够自如高效的运作,使用过程中也要保证人员乘坐舒适。
最后在前两者基础上,进行大力发展,实现全数字化控制,尽可能减少操作人员,防止人员浪费。
矿井提升器电控系统的发展过程应向着无人化,网络化,远程控制化,全自动化的新型设备发展。
1.矿井提升机电气控制系统现状1.1国内现状如今,我国提升机电控系统为交流和直流并存,两者都被大量使用,并逐步被PLC控制系统所取代。
由于六、七十年代技术发展的停顿和较小倒退,使得我国提升机电控系统与国外发达国家电控系统水平存在较大差距。
(一)交流电控系统突变频控制方式是如今大部分大功率交流电控系统的主要控制方式,而由于国内技术的不成熟,基本技术水平和制造实力的欠缺,使得大部分设备都采用国外原装进口设备。
我国自主研发小型普通交流电控系统经过40多年的发展也小聚规模,大部分中小型矿山都采用这种绕线式交流异步电机。
其主要工作原理是通过转子的快速运动,加以电阻进行调速作用的简便是控制系统,主要特点在于操作控制便捷,设备价格较低。
新型PLC系统相结合的控制系统发展日趋成熟并取得了一定的市场,但是因其基本控制思想的腐旧,调速性能的不良,运作效率较低等缺点,仍不能完全被市场所认可,没有根本行的改观。
矿井提升机控制系统的现状与理论基础

常见的电力变换种类
矿井大功率传动设备的发展趋势
4、电力电子的发展史 史前期(1957年以前): 使用水银整流器(汞整流器),其性能和晶闸管类似
。这段时间,各种整流、逆变、周波变流的电路和理论已 经成熟并广泛应用。
晶闸管时代(1958~70年代): 全控型器件时代(70年代后期): 复合器件时代(80年代后期):
矿井提升机控制系统的现状
二、矿井提升机速度图和力图
提升机分为罐笼(副井)提升和箕斗(主井)提升两 种,其速度图和力图有一定的差别,因为箕斗提升有曲轨 行程,因此加速时需要有两段加速,第一段加速到出曲轨 再进行第二段主加速,而罐笼提升没有这个问题。不论是 单绳提升还是多绳提升,其速度图和力图都是一样的,速 度图有三阶段或是多阶段,比较实用的是主井采取六阶段, 副井采取五阶段,下面给出一个六阶段的速度图和力图具 体说明。
柜
头
轴编码 器
轴编码 器
打印机
监视器 工控机
井筒开 关
操作台上放置
矿井大功率传动设备的现状
(5)可与其他系统联网,实现现代化管理。 基于数字调节的以上诸多优点,在我国矿井已逐渐代
替模拟调节,成为主流产品。下图给出一个矿井提升机全 数字直流调速的 示意图
返回
矿井大功率传动设备的发展趋势
一、变频技术在矿井大型设备中的应用 (一)、概述
返回
矿井提升机控制系统的现状
(2)能耗特别大,消耗在电阻上的电能特别客观。 (3)速度不能平滑调节,因而对机械系统的冲击非常,
缩短设备寿命。 (4)速度不易人为控制,存在着安全隐患。
虽然近来对这种方式做了改进,用PLC代替老式的继 电器控制,用可控硅代替接触器切换电阻,在故障率和维 护方面得到了不少改善,但本质的控制方式没有发生改变, 所以以上所阐述的缺点还是存在的。
矿用提升机控制原理
矿用提升机控制原理1. 简介矿用提升机是一种用于提升和运输矿石、煤炭等重物料的设备。
它在矿山和煤矿等行业中起着重要作用。
矿用提升机的控制原理是指对提升机进行自动化控制的基本原理和方法。
本文将介绍矿用提升机控制原理的主要内容。
2. 控制系统组成矿用提升机的控制系统主要由以下几个组成部分组成:2.1 电动机矿用提升机驱动器中常采用交流电动机作为主要执行元件。
通过控制电动机的启动、加速度、减速度等参数,可以实现对提升机的控制。
2.2 传感器矿用提升机上安装有多种类型的传感器,用于检测提升机的运行状态和工况。
常用的传感器包括速度传感器、载荷传感器、位置传感器等。
2.3 控制器控制器是控制矿用提升机的核心部件,主要由工控机或PLC组成。
控制器接收传感器的反馈信号,根据设定的控制策略,输出信号给电动机,调节提升机的运行状态。
2.4 人机界面人机界面用于与操作员进行交互,显示提升机的运行状态和参数,接收操作员的指令。
常见的人机界面包括触摸屏和键盘。
3. 控制原理矿用提升机的控制原理主要包括以下几个方面:3.1 运行模式选择在矿用提升机的控制系统中,通常会设置多种运行模式,包括手动模式和自动模式。
手动模式下,操作员可以通过人机界面手动控制提升机的运行;自动模式下,提升机将按照预设的控制策略进行自动运行。
3.2 运行状态监测通过传感器对提升机的运行状态进行监测,包括监测提升机的速度、载荷、位置等参数。
监测结果将作为控制器的反馈信号,用于调节提升机的运行状态。
3.3 控制策略控制器根据传感器的反馈信号和设定的控制策略,决定提升机的运行参数。
控制策略可以包括对提升机的速度、加速度、减速度等进行调整,以达到设定的运行要求。
3.4 安全保护矿用提升机的控制系统中通常还会包含多种安全保护机制。
例如,当提升机超过设定的载荷范围时,控制器会自动停机,以防止超载运行造成的安全隐患。
4. 总结矿用提升机的控制原理是实现对提升机运行的基础。
矿用提升机控制原理

矿用提升机控制原理1. 引言矿用提升机是用于在矿井内将矿石、岩石等物料向上运送的一种重要设备。
控制矿用提升机的运行和停止是确保矿井生产安全和提高生产效率的关键。
本文将介绍矿用提升机控制原理的基本概念和工作原理。
2. 矿用提升机控制系统概述矿用提升机的控制系统主要由电气控制装置和机械传动系统两部分组成。
电气控制装置通过接收来自操作员的指令,控制提升机的上升、下降、停止和紧急制动等动作。
机械传动系统负责将电气信号转化为物理动作,并驱动提升机的升降运动。
3. 矿用提升机控制信号矿用提升机的控制信号主要有以下几种:•上升信号:用于控制提升机开始上升运动。
•下降信号:用于控制提升机开始下降运动。
•停止信号:用于控制提升机停止运动。
•紧急制动信号:用于紧急情况下迅速制动提升机。
•位置反馈信号:用于监测提升机的位置。
4. 矿用提升机控制原理矿用提升机的控制原理如下:1.操作员通过控制台向电气控制装置发送控制信号。
2.电气控制装置接收到信号后,转换为相应的电信号,并通过继电器或逻辑控制单元进行逻辑判断。
3.根据逻辑判断的结果,电气控制装置控制驱动系统,使提升机开始上升、下降、停止或进行紧急制动。
4.同时,电气控制装置还会通过传感器获取提升机的位置信息,并通过位置反馈信号传回给控制台进行监测。
5. 矿用提升机控制系统的特点矿用提升机控制系统具有以下几个特点:1.高可靠性:矿井环境复杂,对设备的可靠性要求高,控制系统需要具备高可靠性,以确保矿用提升机的安全运行。
2.高精度:矿用提升机在运行中需要保持较高的定位精度,控制系统需要具备高精度的位置控制能力。
3.抗干扰性强:矿井环境存在电磁干扰等因素,控制系统需要具备抗干扰性强的特点,保证信号的准确传输和处理。
4.系统智能化:随着自动化技术的发展,矿用提升机控制系统越来越趋向于智能化,能够自动监测和控制提升机的运行状态。
6. 结论矿用提升机控制原理的理解对于矿井运输系统的安全和效率至关重要。
大型矿井提升机电控系统介绍

矿井提升机中压交-交变频调速电控系统 传动系统介绍
中压交-交变频调速系统
中压交-交变频调速系统以SIEMENS公司产品为例,主回 路采用了可控硅整流方式,调速性能好、容易实现低速大转 矩拖动。经过多年使用证明,该系列产品成熟可靠,是目前 大容量矿井提升机电控系统中的运用最多的产品。
中压交-交变频调速系统性能参数
1、中压交-交变频传动系统参数: 额定输出电压1000-1650VAC 适用主电机额定功率(175% 过载能力):2600KVA以上 调速方式:矢量控制方式 输出电压:0-1.65KV连续 变频器形式:可控硅整流 冷却方式:风冷 2、配套提升机类型:多绳摩擦式矿井提升机; 3、配套主电机:额定电压为1KV-1.65KV的低速同步电动机,与卷筒 直连;
安全回路
制动器立即动作的安全回路(主要): 提升容器过卷; 高、低压电源断电及缺相故障; 主回路过电压或接地; 电枢过电流; 励磁回路失电源、过电流、磁场失 磁; 位置控制装置故障; 变频装置故障; 减速段超速10%及超最高速度15%; 微机故障; 制动油路系统故障; 钢丝绳打滑超限; 错向操作; 监控器与主轴失联; 定子、转子回路故障; 控制系统、调节系统故障; 尾绳故障; 手动操作紧停; 其它双方认为需要紧急制动的故 障。
中压交交变频调速系统主要特点6脉动运行在紧急情况下如一侧即一路6脉冲回路的高压开关柜或变压器或交交变频器损坏的情况下系统可以通过方案中提供的切换开关将患侧设备甩掉使电机的两个绕组串联起来并联接至健全侧的设备从而使系统以全载半速的方式将罐笼提升到位
大型矿井提升机
中压交直交变频调速电控系统
中压交交变频调速电控系统
轻故障保护
允许一次提升循环结束后进行安全制动的安全回路, 这类故障主要有: 液压制动系统油温偏高; 电机温度和主轴轴承温度、天轮轴承温度超限; 变压器温度偏高; 通风系统故障;
煤矿提升机自动控制系统的现状及改进分析

煤矿提升机自动控制系统的现状及改进分析随着我国社会经济的快速发展,煤矿行业也迅速崛起,同时在我国快速发展的还有煤矿提升机及其相应的电气控制技术,它们的兴起,煤矿行业在国内迎来了一次绝佳的改革空间。
由于近年来我国提倡低碳经济的发展,煤矿行业对煤矿提升机的要求也变得越来越高,要求它的电气控制系统必须做到高效率,安全和高质量,使得煤矿提升机以及其内部的电气控制系统的技术改造和应用受到煤矿业内的广泛重视。
电气控制系统的稳定性影响着煤矿提升机的穩定控制以及其既正常又安全的运行,在这种状况下,只有依据实际情况对电气控制系统的技术进行有效的改造,才能使煤矿企业得到更好的发展。
标签:煤矿;提升机;自动控制系统1分析当前煤矿提升机电气控制系统的发展状况在煤矿提升机电气控制系统的内部,存在着一项极为关键的技术,即模拟电子技术。
这项技术来源于国外,随着计算机相关的技术不断地更新完善,一些煤矿企业将其运用到提升机的电气控制系统中。
当前,我国大部分的煤矿企业运用的电气控制系统还是相对比较高级的技术即数字化,利用微处理器将煤矿提升机进行大量数字化的调整和运作,从而达到自动化控制煤矿提升机的目的。
数字化的电气控制系统存在着两种主要的工作方式。
在煤矿提升机工作的时候,虽然这种控制系统具有较高的安全性和可靠的性能,但是它的价格相较于另一种系统来说,是非常高的,对于一些规模比较小的煤矿企业来讲,这并不符合本企业的经济要求,所以如今阶段,这类小规模的企业一般使用TKD 电气控制系统,它的优点就是价格实惠,但是缺点就是应用价值不高,而且在实际的生产工作中其存在着较大的局限性,可靠性比较低以及安全性不能被保证,有较大的风险隐患。
2依据目前自动控制的现状提出对提升机的自动化与信息化改造2.1 提升机信息化改造利用VB语言,通过网络编程,将通过PLC采集的各种信息,通过上位机进行发布,从而实现矿井提升机运行状态的远程监测与信息化管理。
1)网络发布技术:企业网络通常以We b 为中心,能够提供各种面向Inte rne t 用户的信息浏览系统。
提升机电控系统现状分析

提升机电控系统现状分析
一、提升机电控系统现状
随着现代科技的发展,特种机械的自动化程度和智能化程度也在提高,提升机电控系统作为工业设备控制系统的重要组成部分,其在工业生产领
域中发挥着重要的作用。
目前,提升机的电控系统由控制器、传感器、运
动控制装置、监控装置等组成,能够实现提升机的运行状态的检测及监控、运动模式的调节及稳定性的维护,以及可靠性、安全性和维护便利性的提高。
但是,在实际的操作中,提升机电控系统存在着一些问题,比如:电
控系统设计不完善,存在安全隐患;信号传输和处理速度较慢,控制反应
时间较长;控制装置功能缺乏灵活性,不能处理复杂的运动模式等。
二、提升机电控系统发展趋势
(1)智能化技术的应用。
智能化的核心技术在提升机电控系统中得
到广泛应用,主要体现在对电控系统的优化设计、智能化监控、可靠性调
试等方面。
(2)数字化技术的应用。
矿井提升机的现状与发解读
1 绪论1.1引言矿井提升机是煤矿、有色金属矿中的重要运输设备,是“四大运转设备”之一。
矿井提升系统具有环节多、控制复杂、运行速度快、惯性质量大、运行特性复杂的特点,且工作状况经常交替转换。
虽然矿井提升系统本身有一些安全保护措施,但是由于现场使用环境条件恶劣,造成了各种机械零件和电气元件的功能失效,以及操作者的人为过失和对行程监测研究的局限性,使得现有保护未能达到预期的效果,致使提升系统的事故至今仍未能消除。
一旦提升机的行程失去控制,没有按照给定速度曲线运行,就会发生提升机超速、过卷事故,造成楔形罐道、箕斗的损坏,影响矿井正常生产,甚至造成重大人员伤亡,给煤矿生产带来极大的经济损失。
提升机电气控制系统在很大程度上决定了提升机能否实现平稳、安全、可靠地起制动运行,避免了严重的机械磨损,防止较大的机械冲击,减少机械部分维修的工作量,延长提升机械的使用寿命。
所以,提升机电气控制系统的研究一直是社会各届人士共同关注的一个重大课题。
随着矿井提升系统自动化,改善提升机的性能,以及提高提升设备的提升能力等的要求,对电气传动方式提出了更高的要求。
对矿井提升机电气传动系统的要求是:有良好的调速性能,调速精度高,四象限运行,能快速进行正、反转运行,动态响应速度快,有准确的制动和定位功能,可靠性要求高等。
1.2 矿井提升机的现状与发展趋势随着科学技术的进步和矿井生产现代化要求的不断提高,人们对提升机工作特性的认识进一步深化,提升设备及拖动控制系统也逐步趋于完善,各种新技术、新工艺逐步应用于矿井提升设备中。
特别是模拟技术、微电子技术、微电脑技术在提升机控制中的应用已成为必然的发展方向。
1.2.1国外矿井提升机的现状1、晶闸管一电动机(SCR—D)直流低速直联拖动系统部分发达国家原有的交流提升机已基本上被晶闸管一电动机(以下简称SCR—D)系统所取代。
如德国、瑞典等国家已有90%以上采用直流提升机,传动系统大都采用低速直联式(省去减速机),使系统大为简化。
矿井提升机电控系统的现状与发展趋势
矿井提升机电控系统的现状与发展趋势发表时间:2020-11-04T10:01:10.083Z 来源:《基层建设》2020年第21期作者:王卫杰[导读] 摘要:矿井提升机作为井上井下的唯一输送通道,是矿山的咽喉设备,其运行性能的好坏与优劣不仅直接影响到矿山的生产效率,而且影响到矿山的生产安全,同时它也是矿山机电自动、智能化发展水平的显著标志,是数字化矿山建设的重要组成部分矿井提升机属往复运动的生产机械,且其负载为位能型负载,其对电控系统要求比较高,所以它的电气传动及控制一直是各国电气传动界的一个重要研究领域。
开滦股份范各庄矿业分公司河北唐山 063100 摘要:矿井提升机作为井上井下的唯一输送通道,是矿山的咽喉设备,其运行性能的好坏与优劣不仅直接影响到矿山的生产效率,而且影响到矿山的生产安全,同时它也是矿山机电自动、智能化发展水平的显著标志,是数字化矿山建设的重要组成部分矿井提升机属往复运动的生产机械,且其负载为位能型负载,其对电控系统要求比较高,所以它的电气传动及控制一直是各国电气传动界的一个重要研究领域。
基于此,本文主要对矿井提升机电控系统的现状与发展趋势进行分析探讨。
关键词:矿井提升机;电控系统;现状;发展趋势引言提升机运输设备在煤矿生产过程中发挥着重要作用,如煤矿井下、井上的生产过程,都需要通过提升机来实现货物的运输。
煤矿开采是一个施工环境较复杂,安全事故率高的过程,因此煤矿企业对提升机电控系统的安全性、可靠性提出了更高的要求,但提升机电控系统结构设计较复杂,优化提升机电控系统技术方案存在一定的困难。
1 矿井提升机电控系统的现状1.1 矿井提升机电控系统的范围矿井提升机电控系统主要包括配电控制系统、自动化控制系统、电气传动系统等三大部分。
配电系统包括动态无功补偿SVC或SVG、高低压配电(含各种变压器)及综合保护系统。
自动化控制系统包括闸控制系统、数字监控系统、速度控制系统等工艺控制。
1.2 矿井提升机配电系统高压配电系统采用单母线分段结线方式,双电源进线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
虽然近来对这种方式做了改进,用PLC代替老式的继 电器控制,用可控硅代替接触器切换电阻,在故障率和维 护方面得到了不少改善,但本质的控制方式没有发生改变, 所以以上所阐述的缺点还是存在的。
2、异步串级调速方式 在矿井提升控制系统,还有少数一部分采取串级调速
矿井提升机控制系统的现状
二、矿井提升机速度图和力图
提升机分为罐笼(副井)提升和箕斗(主井)提升两 种,其速度图和力图有一定的差别,因为箕斗提升有曲轨 行程,因此加速时需要有两段加速,第一段加速到出曲轨 再进行第二段主加速,而罐笼提升没有这个问题。不论是 单绳提升还是多绳提升,其速度图和力图都是一样的,速 度图有三阶段或是多阶段,比较实用的是主井采取六阶段, 副井采取五阶段,下面给出一个六阶段的速度图和力图具 体说明。
矿井提升机控制系统的现状
v(m/s)
maxv
v2
v1F(N)Fra bibliotekt1t2
t3
t4
t5
t6
t(S)
F2 F'2
F1
F'1
F3
F5
F'3
F'5
t(S)
F4
F6
F'6
F'4
矿井提升机控制系统的现状
图中: 1、V1为初加速终了的速度,亦是箕斗出曲轨的速度,Vmax 最大速度,V2为爬行速度。 2、t1为初加速时间,t2为主加速时间,t3为等速段时间, t4为减速段时间,t5为爬行段时间,t6为机械抱闸时间。 3、力图实线是不带尾绳情况,虚线是带尾绳情况。
矿井提升机控制系统的现状
其自动化问题,对保证矿井的生产、安全和效益具有重要
意义。
矿井提升机有交流拖动和直流拖动两种,早期的交流 拖动采用“异步电机+转子串电阻加速+高压接触器换向+动 力制动(或低频拖动)+继电器控制”方式;直流拖动在20 世纪70年代以前一般采用“发电机-电动机机组+继电器控 制”的方式,在80年代后普遍采用“可控硅整流+电动机+ 模拟调节+继电器控制”的方式。进入20世纪90年代,随着 计算机控制技术和电力电子技术的飞速发展,在提升机拖 动系统中,采用“电动机+可控硅整流+全数字调节+PLC控 制+上位机监控”控制方式,下面就具体说明这些控制方式。
但这种速度图有一定的拐点,会对提升机机械系统造 成冲击,因此速度图可做成平滑的“S”曲线,如下图所示:
矿井提升机控制系统的现状
矿井提升机控制系统的现状
三、交流拖动 1、金属电阻调速方式 这种方式也叫TKD方式,在我国的矿井提升占很大的比例, 超过80%。它指的是在饶线异步电动机的转子回路接入金属 电阻,用控制器或磁力站逐步切除电阻的方法进行调速。 下图给出一个TKD控制方式的 示意。图换向靠高压真空开 关改变进线高压相序,在减速段投入动力制动或是低频制 动,下图给出一个TKD控制方式的示意图。这种控制方式的 优点是结构简单,但缺点是显而易见的,主要表现在以下 几个方面。 (1)调速性能差,起动和减速运行特性出现阶梯式跳跃。
四、直流拖动
1、 F-D机组拖动方式
这种拖动方式中的电动机的电压由专用的直流发电机 供给,发电机由同步电动机拖动。电动机的励磁线圈由固
矿井提升机控制系统的现状
定的直流电源供电,接成他励式。发电机的励磁电压可进 行调节和控制,调节发电机励磁的大小,就可以改变供给 直流电动机的电压,从而达到调速的目的。改变发电机磁 场的极性就可以控制提升电动机的结构。下图即为它的结 构 示意图。
矿井提升机控制系统的现状
方式,这种方式占的份额很少,它的原理是在电动机转子 回路内引入一个附加电势,改变电势的大小即可改变转子 的电流,从而改变电动机的转矩和转速。这种控制方式具 有效率高,调速平滑,爬行段不需要附加其它设备和控制 性能好等优点,但它功率因素低,最大力矩降低约17%, 且线路较复杂,投资高,因此它的利用并不多,逐渐被淘 汰。
F-D拖动装置的优点是调速平滑和稳定,且调速范围 较宽。但它的缺点是设备投资多,占地面积大,建筑和基 础费用大,并且功耗较大,经济效益不好。
矿井提升机控制系统的现状
返回
矿井提升机控制系统的现状
2、可控硅整流器-电动机拖动装置
这种拖动装置利用可控硅整流器的直流电压向提升电 动机供电,电动机的电枢和磁场均可它来供电,因为直流 电压可通过控制角均匀调节,电动机的转速便可以得到均 匀改变而达到无级调速。电动机的换向可分为电枢换向和 磁场换向两种方式,前者是用两组大容量的可控硅整流器 对电枢进行供电,磁场用一组小容量的整流器供电;后者 只用一组大容量的整流器对电枢供电,磁场用两组小容量 的整流器。三相整流桥 示意图 如下图所示。
电
X1
源
X2
~6KV
备
进
X3
线
用
GLK1
高压真空换向柜 FC
GyD
继电器 控制保护柜
~380V
DFC
可控硅
低频电源装置
ZC
D1 D2
DXLC DZC D3
yD
测速发电机
接触器控制柜 金属电阻
返回
矿井提升机控制系统的现状
(2)能耗特别大,消耗在电阻上的电能特别客观。 (3)速度不能平滑调节,因而对机械系统的冲击非常,
矿井提升机控制系统
二00六年一月
目录
一、矿井提升机控制系统的现状 二、矿井大功率传动设备的发展与趋势 三、矿井提升机控制系统的理论基础
矿井提升机控制系统的现状
一、概述
矿井提升机作为矿山企业的关键机电设备,对矿山的 高效、安全生产与经济的营运具有极其重要的作用,它不 仅装机容量大,是矿山的主要耗电大户,而且它作为一个 典型的位势力矩负载,要求其拖动电动机在其机械特性的 四个象限内频繁周期性地进行启动、制动和反向运行。反 映其运行状态的速度图和力图是根据设计的提升能力和安 全规程确定的,对其在运行过程中的加速度、减速度以及 各运行阶段的行程和最后的停车位置都有精确的要求和严 格的限制。因此,提升机始终是电力拖动与控制的典型应 用装置和研究对象,正确处理好矿井提升机的拖动系统极
可控硅供电装置的优点是动作速度快,维护工作量小, 比F-D机组运行效率高,体积小,重量轻和占地面积小。但 它的缺点是对电网无功冲击大,高次谐波会影响电网电压
矿井提升机控制系统的现状
eL N
id
T4
T6
T2
a
ea uT1
Ud Ed
c
b
iT1
T1
T3
T5