阿尔法智能机器人讲解
阿尔法狗的工作原理及核心技术

阿尔法狗的工作原理及核心技术阿尔法围棋(AlphaGo)是第一个击败人类职业围棋选手、第一个战胜围棋世界冠军的人工智能程序,由谷歌(Google)旗下DeepMind公司戴密斯哈萨比斯领衔的团队开发。
那么阿尔法狗的工作原理是什么?相关技术又有哪些呢?下面让我们一起来看看。
阿尔法狗工作原理阿尔法围棋(AlphaGo)为了应对围棋的复杂性,结合了监督学习和强化学习的优势。
它通过训练形成一个策略网络(policynetwork),将棋盘上的局势作为输入信息,并对所有可行的落子位置生成一个概率分布。
然后,训练出一个价值网络(valuenetwork)对自我对弈进行预测,以-1(对手的绝对胜利)到1(AlphaGo的绝对胜利)的标准,预测所有可行落子位置的结果。
这两个网络自身都十分强大,而阿尔法围棋将这两种网络整合进基于概率的蒙特卡罗树搜索(MCTS)中,实现了它真正的优势。
新版的阿尔法围棋产生大量自我对弈棋局,为下一代版本提供了训练数据,此过程循环往复。
在获取棋局信息后,阿尔法围棋会根据策略网络(policynetwork)探索哪个位置同时具备高潜在价值和高可能性,进而决定最佳落子位置。
在分配的搜索时间结束时,模拟过程中被系统最频繁考察的位置将成为阿尔法围棋的最终选择。
在经过先期的全盘探索和过程中对最佳落子的不断揣摩后,阿尔法围棋的搜索算法就能在其计算能力之上加入近似人类的直觉判断。
围棋棋盘是19x19路,所以一共是361个交叉点,每个交叉点有三种状态,可以用1表示黑子,-1表示白字,0表示无子,考虑到每个位置还可能有落子的时间、这个位置的气等其他信息,我们可以用一个361*n维的向量来表示一个棋盘的状态。
我们把一个棋盘状态向量记为s。
当状态s下,我们暂时不考虑无法落子的地方,可供下一步落子的空间也是361个。
我们把下一步的落子的行动也用361维的向量来表示,记为a。
阿尔法围棋

阿尔法围棋
阿尔法围棋(AlphaGo)是第一个击败人类职业围棋选手、第一个战胜围棋世界冠军的人工智能机器人,由谷歌(Google)旗下DeepMind公司戴密斯•哈萨比斯领衔的团队开发。
其主要
工作原理是“深度学习”。
2016年3月,阿尔法围棋与围棋世界冠军、职业九段棋手
李世石进行围棋人机大战,以4比1的总比分获胜;2016年末2017年初,该程序在中国棋类网站上
以“大师”(Master)为注册帐号与
中日韩数十位围棋高手进行快棋对决,
连续60局无一败绩;2017年5月,
在中国乌镇围棋峰会上,它与排名世
界第一的世界围棋冠军柯洁对战,以
3比0的总比分获胜。
围棋界公认阿
尔法围棋的棋力已经超过人类职业围
棋顶尖水平,在GoRatings网站公布
的世界职业围棋排名中,其等级分曾超过排名人类第一的棋手
柯洁。
2017年5月27日,在柯洁与阿尔法围棋的人机大战之后,阿尔法围棋团队宣布阿尔法围棋将不再参加围棋比赛。
2017年10月18日,DeepMind团队公布了最强版阿尔法围棋,代号AlphaGo Zero。
阿尔法机器人编程说明书
Alpha 1 PC软件使用说明书目录软件界面及操作-------------------------------------------------------------------------------------1登录界面--------------------------------------------------------------------------------------------2菜单栏--------------------------------------------------------------------------------------------2-5 文件--------------------------------------------------------------------------------------------2 设备------------------------------------------------------------------------------------------2-4 系统--------------------------------------------------------------------------------------------4视图-------------------------------------------------------------------------------------------------5帮助-------------------------------------------------------------------------------------------------5动作编辑区--------------------------------------------------------------------------------------6-11 音乐层---------------------------------------------------------------------------------------6-7 动作层--------------------------------------------------------------------------------------8-11动作组列表区--------------------------------------------------------------------------------------12 3D预览图区---------------------------------------------------------------------------------------12姿态编辑区------------------------------------------------------------------------------------13-16 回读---------------------------------------------------------------------------------------13-14 复位-------------------------------------------------------------------------------------------15 舵机角度微调----------------------------------------------------------------------------------16动作帧编辑区-----------------------------------------------------------------------------------17-18指令盒区----------------------------------------------------------------------------------------19-20 新动作------------------------------------------------------------------------------------------19 缺省动作----------------------------------------------------------------------------------------20编辑一个完整的舞蹈文件------------------------------------------------------------------------21-23软件界面及操作软件界面如下图:下设文件、设备、系统、视图等子菜单,界面包含动作编辑区、动作组列表、动作帧编辑区、姿态编辑区、3D预览图及指令盒等。
第一个击败人类职业围棋选手的人工智能叫什么

第一个击败人类职业围棋选手的人工智能叫什么
第一个击败人类职业围棋选手的人工智能叫阿尔法围棋。
阿尔法围棋(AlphaGo)是第一个击败人类职业围棋选手、第一个战胜围棋世界冠军的人工智能机器人,由谷歌(Google)旗下DeepMind公司戴密斯·哈萨比斯领衔的团队开发。
其主要工作原理是“深度学习”。
阿尔法围棋(AlphaGo)是一款围棋人工智能程序。
其主要工作原理是“深度学习”。
“深度学习”是指多层的人工神经网络和训练它的方法。
一层神经网络会把大量矩阵数字作为输入,通过非线性激活方法取权重,再产生另一个数据集合作为输出。
这就像生物神经大脑的工作机理一样,通过合适的矩阵数量,多层组织链接一起,形成神经网络“大脑”进行精准复杂的处理,就像人们识别物体标注图片一样。
阿尔法围棋用到了很多新技术,如神经网络、深度学习、蒙特卡洛树搜索法等,使其实力有了实质性飞跃。
美国脸书公司“黑暗森林”围棋软件的开发者田渊栋在网上发表分析文章说,阿尔法围棋系统主要由几个部分组成:一、策略网络(Policy Network),给定当前局面,预测并采样下一步的走棋;二、快速走子(Fast rollout),目标和策略网络一样,但在适当牺牲走棋质量的条件下,速度要比策略网络快1000倍;三、价值网络(Value Network),给定当前局面,估计是白胜概率大还是黑胜概率大;四、蒙特卡洛树搜索(Monte
Carlo Tree Search),把以上这四个部分连起来,形成一个完整的系统。
阿尔法围棋机器人
阿尔法围棋机器人引言随着人工智能技术的不断发展,阿尔法围棋机器人作为一项重要的创新成果,已经引起了广泛的关注和讨论。
阿尔法围棋机器人是基于深度学习算法的人工智能系统,通过学习和模拟人类的下棋思路和技巧,能够在围棋比赛中达到甚至超越人类棋手的水平。
深度学习算法在围棋中的应用深度学习算法在围棋中的应用是阿尔法围棋机器人能够实现非凡棋力的关键。
深度学习是一种基于人工神经网络的机器学习方法,其通过大量的数据训练模型,使其能够自动学习和提取特征,从而实现对复杂问题的解决。
在围棋中,阿尔法围棋机器人通过深度学习算法学习大量的围棋棋局数据,并构建神经网络模型。
这个模型能够通过输入一个围棋棋局的状态,输出每一步棋的最优选择。
而这个模型的训练是通过对大量棋局数据进行深度学习算法的训练,不断调整模型参数来优化网络的预测准确度。
阿尔法围棋机器人的核心技术强化学习强化学习是阿尔法围棋机器人实现优秀水平的核心技术之一。
在围棋中,每一步棋对于最终局势的影响是复杂且长期的,而强化学习则是通过不断试错和反馈来优化模型的决策能力。
阿尔法围棋机器人利用强化学习的方法不断与自己下棋,通过观察自己的胜负情况来调整模型的参数,从而改进自身的棋力。
蒙特卡洛树搜索蒙特卡洛树搜索是阿尔法围棋机器人实现快速搜索最优解的关键技术之一。
它通过模拟大量的围棋棋局来评估每一步棋的胜率,并根据胜率来选择最优的走棋策略。
蒙特卡洛树搜索能够在很短的时间内找到最优解,并将其用于实际的棋局中。
阿尔法围棋机器人的优势和应用前景优势阿尔法围棋机器人相较于人类棋手具有以下优势:•学习能力强:通过深度学习算法,阿尔法围棋机器人能够自动学习和提取围棋中的关键特征,从而实现对复杂棋局的准确判断和决策。
•无疲劳和情绪:与人类棋手不同,阿尔法围棋机器人不会受到疲劳和情绪的影响,能够持续保持高水平的棋力。
•高速搜索:阿尔法围棋机器人拥有高效的蒙特卡洛树搜索算法,能够在短时间内搜索到最优解。
人工智能机器人阿尔法套装外设可用接口一览表
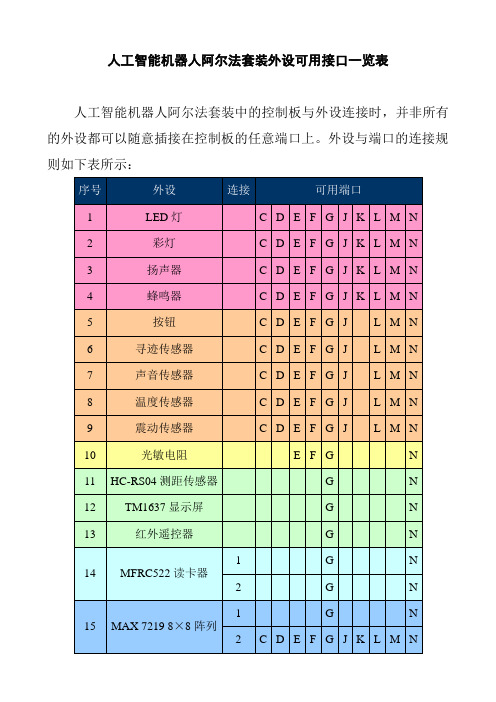
人工智能机器人阿尔法套装外设可用接口一览表
人工智能机器人阿尔法套装中的控制板与外设连接时,并非所有的外设都可以随意插接在控制板的任意端口上。
外设与端口的连接规则如下表所示:
总结:
1、LED灯、彩灯、扬声器、蜂鸣器可使用所有端口。
2、按钮、寻迹传感器、声音传感器、温度传感器、震动传感器不能使用K端口。
3、光敏电阻智能使用E、F、G、N端口。
4、红外遥控器、HC-RS04测距传感器、TM1637显示屏只能使用G、N端口。
5、MFRC522读卡器需要连接两个端口,连接1和连接2都只能使用G或N端口。
6、MAX 7219 8×8阵列需要连接两个端口,连接1只能使用G或N端口,连接2可使用所有端口。
阿尔法智能人形机器人

阿尔法智能人形机器人近年来,人工智能技术的迅猛发展使得智能机器人逐渐成为现实。
其中,阿尔法智能人形机器人作为一种具有高度智能化和仿真人形外观的机器人,引起了广泛的关注。
本文将探讨阿尔法智能人形机器人的应用领域、技术特点以及对未来社会的影响。
一、阿尔法智能人形机器人的应用领域1.家庭助理阿尔法智能人形机器人能够识别人的面部表情和语言语调,掌握家庭成员的喜好和习惯,提供个性化的服务。
它可以帮助老人照料日常生活,为小孩提供学习指导,还可以协助家庭成员进行日程管理和物品寻找,大大提高了生活的便捷性。
2.医疗护理阿尔法智能人形机器人可以承担老年护理和康复辅助等工作。
其通过搭载传感器和视觉系统,可以监控老人的健康状况、记录生理参数,并在出现紧急情况时发出警报。
此外,机器人还能进行康复训练,并提供互动活动,促进老年人身心健康。
3.教育培训阿尔法智能人形机器人可以在学校、培训机构等场所担任教师助理的角色。
它可以与学生进行互动,解答问题,纠正错误,并根据学生的学习情况进行个性化的辅导。
机器人的出现不仅可以拓宽学生的知识面,还可以培养学生的创造力和解决问题的能力。
二、阿尔法智能人形机器人的技术特点1.人脸识别技术阿尔法智能人形机器人通过多模态传感器获取人类的视觉、听觉、触觉和语言等信息,利用深度学习算法和人工神经网络进行数据处理和分析,实现了对人脸的识别和情感识别。
2.自然语言处理技术机器人能够理解和使用自然语言,实现与人的对话交流。
通过自然语言处理技术,机器人可以识别语音指令、回答问题,并能够进行语音合成,使得与机器人的交互更加便捷自然。
3.机器视觉技术阿尔法智能人形机器人利用机器视觉技术对周围环境进行感知和识别,能够实现障碍物的避障、物品的分类和识别等功能。
同时,通过人脸识别和目标追踪等技术,机器人可以识别和追踪特定的人物。
三、阿尔法智能人形机器人对未来社会的影响1.劳动力替代与就业变革随着阿尔法智能人形机器人的普及应用,某些劳动力密集型行业可能会受到冲击。
生活中常见的10种机器人

生活中常见的10种机器人生活中常见的10类机器人——小漠近几年,机器人的电影上映的越来越多,机器人行业也逐渐火爆,各大新闻报纸、杂志、电视中也都能看见机器人的影子。
通常小编去逛展览展会或一些活动,也都能在现场捕捉到机器人的影子。
变形金刚、超人查派、瓦力、机器人总动员以及机器人女友……在这里,小编给大家总结了10款我们生活、或者电影电视中常见的机器人,这些机器人适用的场所各有不同,同时面向的群众和年龄也有些差异,下面我们就来详细了解下这10款机器人。
一、扫地机器人扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,机身外形以圆盘为主,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。
一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。
一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
相信很多家庭主妇看到这块机器人后一定会非常的欣喜,有了这款机器人后,打扫房间的烦琐事就瞬间少了一大半,而且还能自主充电,基本不用主人太过操心。
价格一般在1500-3000不等二、送餐行走机器人这一类的机器人其实还是在2014年年底的时候开始兴起,当时打着大量节省人工的口号在各类平台中进行宣传,2015年下半年开始,机器人餐厅也在国内相距开起,同时因为机器人这个噱头,在餐厅刚开始的时候也获得了比较火爆的人气,渐渐地商家发现,其实现在的送餐机器人还并不能达到替代人工的作用,相反,餐厅里面送餐机器人的数量过多,就会吸引小孩子前去围观,造成无法送餐的情况。
后面有些商家又想到其他新的方法,在餐厅配备送餐机器人的同时,在餐厅的门口另外再配备一些其他的展示类机器人,用于提供客人拍照合影,同时也增加餐厅的知名度。
送餐机器人虽然不能完全取代人工从而给主人节省大量的人工费用支出,但是却可以利用机器人的噱头来吸引大量的人气,毕竟它确实拥有这部分送餐的功能,不过购买送餐机器人的同时要记得搭配一些展示类的机器人。
从深蓝到阿尔法狗人机大战20年进化史

从深蓝到阿尔法狗人机大战20年进化史作者:邓婷来源:《科学大观园》2018年第02期人工智能是对人的意识、思维的信息过程的模拟,使得机器能像人那样思考,甚至超过人的智能。
自1956年这个概念被提出并确立以来,这个领域就被视为人类最高的梦想之一。
而现在无疑又是一个人工智能历史上最重要的时刻。
向AlphaGo的“惊人一手”脱帽致敬围棋和国际象棋在复杂程度上不属于一个量级,围棋是一种变数极多、充满不确定的竞技,每一步棋的可能性都是一个几乎无法穷尽的量级,一回合有250种可能,而一盘棋可以长达150回合。
也就是说,AlphaGo是无法以“深蓝”的方式获胜的,以蛮力“强记”,或以“固定”程序逻辑决策,或穷极所有可能性进行筛选,这些在围棋中都是不可能的。
围棋问题与现实生活中的问题是相通的,国人甚至将“博弈”围棋视为洞悉人性、参悟人生的过程。
然而,现在下围棋的却是一个机器,意味着这个机器除拥有超强的记忆能力、逻辑思维能力,还要拥有创造力甚至个性。
“感觉就像一个有血有肉的人在下棋一样,该弃的地方也会弃,该退出的地方也会退出,非常均衡的一个棋风,真是看不出出自程序之手。
”柯洁说,AlphaGo有好几次落子极其“非常规”,许多专业棋手都表示“看不懂”。
而聂卫平(九段)甚至表示自己想要对AlphaGo的“惊人一手”脱帽致敬,因为它“用不可思议的下法辟立了围棋常识之外的新天地”。
也就是说,这不是AlphaGo从既往棋局中“复制”过来的,而是自己“创造”的战术打法。
实际上,AlphaGo的最主要工作原理就是近几年人工智能领域最为热门的“深度学习”(DeepLearning),也就是通过模仿人类大脑神经网络,让机器模拟人脑的机制进行记忆、学习、分析、思维、创造……人工智能将从实验走向商用人工智能越来越近。
显然,它并不会只用来下棋,实际上它正掀起一轮轮产业变革、经济变革甚至社会变革。
小米科技创始人、董事长雷军表示,自己既是围棋爱好者,也写了10年程序,因此,他坚信机器战胜人只是时间问题,但是并未想到会如此快,因为之前科学家们都认为,至少还要等数年,人工智能才能够在围棋上打败人类。
阿尔法功能

阿尔法功能阿尔法功能(AlphaGo)是一种人工智能系统,它由人工智能公司DeepMind开发,用于在围棋游戏中与人类对战。
阿尔法功能在2017年成功战胜了围棋世界冠军柯洁,引起了广泛的关注和讨论。
阿尔法功能的核心功能是学习和自我提高。
它通过分析大量的围棋棋局数据,利用强化学习算法和深度神经网络来提高自己的下棋水平。
相比传统的围棋程序,阿尔法功能更加聪明和灵活,能够发现更多的局势变化和可能的走法,并做出更好的决策。
阿尔法功能的学习过程可以分为两个阶段:自我对战和与人类对战。
在自我对战阶段,阿尔法功能会与自己的复制品进行对弈,从中学习并改进自己的下棋策略。
在与人类对战阶段,阿尔法功能会面对各种级别的围棋选手,从中获取更多的经验和知识,提高自己的水平。
阿尔法功能的出现对围棋界产生了巨大的影响。
它的出现使人们重新认识到人工智能的潜力和可能性。
阿尔法功能的下棋水平被认为超过了人类,这让许多人感到震惊和惊讶。
人们开始探讨人工智能在其他领域的应用,以及与人类的关系和交互方式。
然而,阿尔法功能也引发了一些问题和争议。
一些人认为它只是一种工具,不能完全代替人类的特长和智慧。
他们担心人工智能会取代人类的工作和职业,并带来一系列的社会问题。
另一方面,一些人认为阿尔法功能的成功证明了人工智能已经达到了令人惊讶的水平,它可以成为人类的伙伴和助手,帮助人类解决一些复杂的问题和挑战。
总的来说,阿尔法功能是一种具有学习和自我提高功能的人工智能系统,它在围棋游戏中取得了巨大的成就。
它的出现使人们对人工智能的潜力和可能性有了更深入的认识,并引发了人们对于人工智能的前景和影响的讨论和思考。
无论是支持还是担心,阿尔法功能都将继续发展和创新,并在人类社会中扮演重要的角色。
阿尔法拉瓦尔机器人系列产品说明书

© Alfa Laval Slide 1Clean lube oil is keyto an effective process•With clean lube oil the production process −can operate at normal performance •However, the lube oil is often contaminated with −solid particles−waterRisks connectedto poor lube oil quality •Contamination means exposure to several risks:−Chemical degradation−Corrosion−High oil consumption−Friction: wear and noise−Efficiency losses−CloggingSlide 3Consequencesof poor lube oil quality •Contamination can lead to costly consequences:−Unplanned production stops−Lower productivity−Disposal/replacement of lube oil−Machine wear / shorter lifetimeParticle contamination•Particle contamination comes from several sources:−Wear from metal−Plastic and rubber components−Paint flakes−Dust•Particles in the lube oil impair system functionality −Can be trapped in fine clearances, like bearings−Can cause micro cracks on the surface−Degrades the metal until it falls apart−Changes the lube oil propertiesWater contamination•Water contamination comes from sources like:−Leakage−Condensation•Water in the lube oil impair system functionality −Creating emulsions damaging valves and pumps−Oxidation of oils and additives−Reduction of oil viscosity and lubricity−CorrosionSlide 6Methods for cleaning lube oil © Alfa Laval Slide 7Filter for cleaning lube oil •Removes solid particles from lube oil •Catches particles larger than selected mesh size+Advantages+ Low initial cost–Disadvantages−Does not remove water−Cleaning efficiency degrades over time−High maintenance costs (change of filtercartridges)Coalescer for cleaning lube oil •Removes water from lube oil•Often used in combination with a filter+Advantages+ Low sound emission, due to no moving parts–Disadvantages−Functions best with low-viscosity fluids−No solids handling−Cannot be used if surfactants are presentCentrifugal separatorfor cleaning lube oil•Removes both particles and water•Contaminants separated by the use of gravity+Advantages+ High and consistent cleaning performance+ Continuous contamination removal+ Minimal maintenance and attendance+ Easy integration in production process–Disadvantages−Soluble particles and solids with a density below 2000 kg/m³ are not removed−Sound levels typically 64-75 db(A)**for solid retaining separatorsPerformance& CostTotal cost of ownership •Considerations when choosing cleaning method −Performance−Cost•At the bottom line, different technologies come with different Total Cost of Ownership (TCO)Investment•Filter technology comes with lower initial costs • A Centrifugal Separator module has a comparably higher initial costMaintenance costs•Centrifugal separators require minimal maintenance and spare parts, which means lower costs formaintenance• A filter solution requires manual service, filter element replacement and disposal of used filtercartridgesOperating performance•Filter, Coalescer and Centrifugal Separators operate at different ranges•Cleaner lube oil means more uptime and longer equipment lifeSlide 15Particles effect on machine life •Expected machinery lifetime is directly connected to the cleanliness of the lube oilSlide 16Water level effect on machine life •Expected machinery lifetime is directly connected to the cleanliness of the lube oilSlide 17Centrifugal Separators:Best Total Cost of Ownership (TCO)•Excellent and continuous performance•Smooth and hassle-free operations•Low maintenance costs•Prolonged equipment lifetimeSide by side comparisonSlide 19Centrifugal Separatorreduced downtime with 90%•Weyerhaeuser Flint River switched to centrifugal separators•Compared to the previous filter solution they recorded reduced downtime by 90%•Worst case scenario downtime dropped from 14h/month to 3 h/month•Repair costs were reduced by 74%。
人工智能机器人阿尔法套装控制板端口连接规则
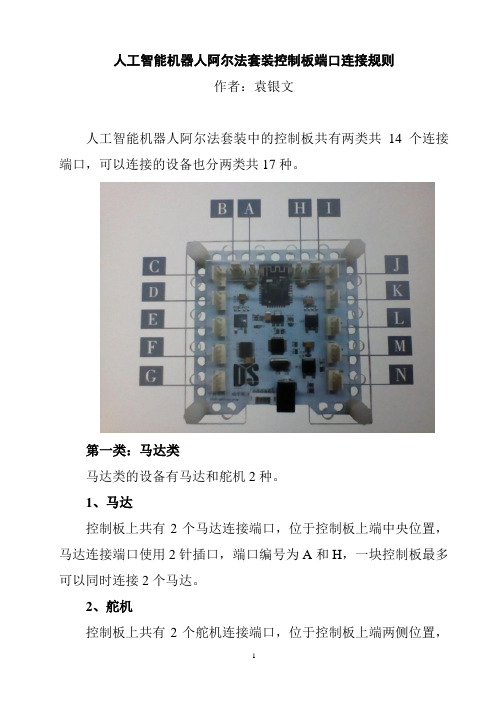
人工智能机器人阿尔法套装控制板端口连接规则作者:袁银文人工智能机器人阿尔法套装中的控制板共有两类共14个连接端口,可以连接的设备也分两类共17种。
第一类:马达类马达类的设备有马达和舵机2种。
1、马达控制板上共有2个马达连接端口,位于控制板上端中央位置,马达连接端口使用2针插口,端口编号为A和H,一块控制板最多可以同时连接2个马达。
2、舵机控制板上共有2个舵机连接端口,位于控制板上端两侧位置,舵机连接端口使用3针插口,端口编号为B和I,一块控制板最多可以同时连接2个舵机。
马达类设备端口连接规则及最大连接数见下表:第二类:外设类控制板上共有10个外设连接端口,控制板左右两侧各有5个,外设连接端口使用4针插口,左侧端口编号为C、D、E、F、G,右侧端口编号为J、K、L、M、N。
大部分外设使用1个端口,只有MFRC522读卡器和MAX 7219 8×8阵列使用2个端口。
外设连接控制板时并不是可以随意插在任意端口上的,必须插接在支持的端口上才能正常使用。
比如LED灯可以连接在所有外设端口上,但红外接收器却只能连接在左侧的G端口或右侧的N端口上。
同种外设连接的数量也是有限制的。
比如支持按钮和温度传感器的端口都有9个,但一块控制板上最多可以连接8个按钮,却最多只能连接1个温度传感器。
本人通过实验,对控制板与外设的连接关系整理成以下表格以供大家参考。
1、外设端口使用规则总结:1、LED灯、彩灯、扬声器、蜂鸣器可使用所有端口。
2、按钮、寻迹传感器、声音传感器、温度传感器、震动传感器可以使用K端口以外的所有端口。
3、光敏电阻只能使用E、F、G、N端口。
4、红外遥控器、HC-RS04测距传感器、TM1637显示屏只能使用G、N 端口。
5、MFRC522读卡器需要连接两个端口,连接1和连接2都只能使用G 或N端口。
6、MAX 7219 8×8阵列需要连接两个端口,连接1只能使用G或N端口,连接2可使用所有端口。
机器人术语参数与阿尔法机器人
工业机器人的主要技术参数包括:自由度、精度、工作范围、最大工作速度和承载能力1、自由度:自由度(degree of freedom)是指机器人所具有的独立坐标轴运动的的数目,不包括末端执行器的开合自由。
机器人的一个自由度对应一个关节,所以自由度与关节的概念是相等的。
自由度是表示机器人的动作灵活程度的参数,自由度越多就越灵活,但结构也越复杂,控制难度越大,多以机器人的自由度根据用于设计,一般3~6个之间。
大于6个的自由度称为冗余自由度,冗余自由度增加了机器人的灵活性,可方便机器人避开障碍物和改善机器人的动力性能,人类的手臂(大臂、小臂、手腕)共有7个自由度,所以工作起来很灵巧,可避开障碍物与,并可以不同的方向到达同一个目标位置。
2、定位精度和重复定位精度:定位精度和重复定位精度是机器人的两个精度指标。
定位精度是指同一环境、同一条件、同一目标动作、同一命令之下,机器人连续重复运动若干次时,其位置的分散情况,是关于精度的统计数据。
因重复定位精度不受工作载荷变化的影响,故通常用重复定位精确,之一指标作为衡量示数,再现工业机器人水平的重要标准。
3、作业范围:作业范围是机器人运动时手臂末端或手腕中心所到达的所有点的集合,也称工作区域。
由于末端执行器的形状和尺寸是多种多样的,为真实反映机器人的特征参数,故作业范围是指不安装末端执行器时的工作区域。
作业范围的大小不仅与机器人各连杆的尺寸有关,而且与机器人的总体结构形势有关。
作业范围的形状和大小是十分重要的,机器人在执行某作业时可能会因存在手部不能到达的盲区而不能完成任务。
4、最大工作难度:生产机器的厂家不同,其所指的最大工作速度也不同,有的厂家指工业机器人主要自由度上最大的稳定速度,有的厂家指手臂末端最大的合成速度,对此通常都会在技术参数中加以说明,最大工作速度越高,其工作效率就越高。
但是,工作速度就要花费更多的时间加速或减速,或者对工业机器人的最大加速率或最大减速率的要求就更高。
阿尔法蛋tyr100使用说明书

阿尔法蛋tyr100使用说明书
产品概述:
阿尔法蛋T YR100机器人,是由科大讯飞旗下合肥淘云科技有限公司倾力打造的一款教育陪伴智能机器人。
集成教育内容、超级电视、视频通话、智能音箱和自然语交互机器人的阿尔法蛋是一款功能聚合的机器人。
科大讯飞阿尔法蛋教育陪伴机器人TYR100是科大讯飞推出的一款智能机器人。
功能用途视频通话,外语学习,其他功能等等。
基本参数
智能识别方言识别
同步教育内容、人机聊天、视频通话、视频监控、电影电视点播、
应用功能
音乐点播等功能
智能管家智能家电控制等功能
硬件参数
屏幕描述支持多点触控的高清LCD
摄像头500万像素
麦克风声源定位、4+1麦克风阵列
扬声器20W
实时共享一键上传照片
规格参数
外观设计白色
产品尺寸包装:250*250*320mm 产品重量
包装:2800g
裸机:1490g
其它特点线长:1.5m
外壳材质:ABS+PC
屏幕面罩:高透光TP玻璃板
CPU:四核CPU
内存:2GB
存储:8GB
软件系统:安卓6.0
供电:电源供电
电源适配器:输入 AC 220V/50HZ 输出 12V/2A
外设接口:支持高清HDMI输出,支持USB host
人机闲聊,影视直播,生活助手,知识小课堂,儿童模式,视频通话,视频监控,语音拍照,事项提醒,天气查询,记忆功能,远程唤醒,语音助手,菜谱做法等
附件
包装清单主机x1
电源适配器x1 USB数据线x1 取卡针x1
保修卡x1
说明书x1。
阿尔法蛋运行原理

阿尔法蛋运行原理
阿尔法蛋是基于人工智能技术的语音助手设备,其运行原理如下:
1. 语音识别:阿尔法蛋内置了语音识别系统,能够将用户说出的语音转换成可识别的文本。
2. 自然语言处理:阿尔法蛋通过自然语言处理技术,对用户的语音命令或问题进行分析和理解,从而能够提供相应的回答或执行相应的操作。
3. 学习与训练:阿尔法蛋具有学习能力,能够通过大量的数据训练自身的模型,提高其语义理解和回答问题的准确性。
4. 数据库与知识图谱:阿尔法蛋通过连接到云端服务器上的数据库和知识图谱,能够获取大量的信息和知识,以便更好地回答用户的问题。
5. 语音合成:阿尔法蛋内置了语音合成系统,能够将文本转换为自然流畅的语音输出,向用户提供回答或播放音乐等声音。
总的来说,阿尔法蛋通过将语音识别、自然语言处理、学习与训练、数据库与知识图谱以及语音合成等技术结合起来,实现了与用户的语音交互和智能应答。
它能够理解用户的命令或问题,并提供相关的回答、执行相应的任务,从而提供便利和智能化的语音交互体验。
阿尔法蛋精品诗词课

阿尔法蛋是一款智能语音机器人,它可以提供诗词课程。
以下是一些关于阿尔法蛋精品诗词课的信息:
1. 课程内容:阿尔法蛋的诗词课可能涵盖了各个朝代的经典诗词作品,包括唐宋诗词、元曲等。
课程内容可能包括诗词的背景、意境、赏析等方面。
2. 互动学习:阿尔法蛋可以通过语音交互的方式与用户进行互动,回答用户的问题,帮助用户更好地理解诗词的含义。
3. 学习进度:阿尔法蛋可以根据用户的学习进度和兴趣,为用户推荐适合的诗词课程,帮助用户更好地掌握诗词知识。
4. 诗词背诵:阿尔法蛋可以帮助用户背诵诗词,通过语音提示和互动练习,帮助用户提高诗词的记忆和理解能力。
需要注意的是,阿尔法蛋的诗词课程可能会因产品型号和版本的不同而有所差异。
如果您对具体的课程内容和功能有疑问,建议您查阅相关产品说明书或联系客服进行咨询。
阿尔法智能人形机器人

阿尔法智能人形机器人“阿尔法”在希腊字母中读“alpha”,因为希腊字母首位为a,因此“阿尔法”也被比作是“第一”的意思。
2022年9月下旬,一场在北京工人体育馆进行的足球比赛,让一对机器人球迷借此走红,而它们也拥有一个别具深意的名字,即“阿尔法”。
随着关注群体的不断扩大,网民对机器人的兴趣也逐渐提升。
有不少网民对这两个小家伙进行“人肉搜索”后发现,两个小家伙不仅不是海外高科技玩具,反而是地地道道的中国造智能机器人。
随后记者通过多方渠道打探,发现其为深圳优必选科技有限公司研发的机器人产品之一,公司内部称其为“阿尔法”,而这款机器人具有编辑动作等智能化的扩展学习能力,是一款不折不扣的智能型机器人。
图2:记者在网上找到的阿尔法编程界面,其骨骼可编辑数量已十分丰富对多数国内网民来说,机器人发展到一个什么样的水平,或许没有一个十分统一的认识标准。
不少人认为中国的机器人技术十分落后,甚至有人觉得全世界只有日本才能具备制造机器人的技术。
实际上,机器人技术在全球已被公认为下一个30年需重点关注和探索的科技领域。
美国微软创始人比尔盖茨辞去微软董事长之后,也曾表达了对机器人技术的看好,并全身心投入慈善和机器人技术的投资领域。
在世界上,日本在工业机器人技术和民用智能化机器人领域有一定领先优势,而美国在军用机器人方面的探索早已开始。
中国在工业,民用,军用多个领域都在积极发力,而由深圳科技企业研发的智能机器人不难看出,国内对机器人技术的认识和普及,已经进入了一个全新的局面。
图3:积木式机器人有助于培养年轻一代对先进科技的认知能力及动手能力“阿尔法”的命名或许拥有深意,但中国机器人能否在国际上步入尖端领域,依然要靠更多科技企业和科技人才的努力。
从优必选官网的现有产品不难看出,其不仅拥有家庭服务型的各类扫地智能机器人,也有如“阿尔法”这样的智能服务型机器人,相比而言,“阿尔法”具有更加健全的四肢和可编辑能力,为后期拓展更加丰富的服务功能提供了保障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学人走路身体灵活在17日召开的美国科学促进协会会议上,研究人员展示了他们的最新发明成果——新型步行机器人。
相关研究报告将刊登在本周出版的《科学》杂志上。
新型机器人运用自己能弯曲的双脚和电动化脚踝带动双腿迈步,其双臂也会随着脚步的移动来回摆动保持身体平衡。
康奈尔大学研究人员安迪·鲁伊纳说新型步行机器人走路时一起一伏,使身体灵活运动,跟人没什么两样。
鲁伊纳说“我们让它更多地注意动作。
”而其动作就是孩子学走路时必须掌握的。
因此,科学家们把此类机器人形象地称为“初学走路的孩子”。
任何路面行走自如麻省理工学院科学家泰德拉克说,这种机器人内置多个传感器,使其“在20分钟内学会像人一样走路”。
传感器能以每秒200次的速度测量机器人每个动作的倾斜度和速度,然而向其他电动机下达新指令来调节身体姿势。
传感器还指示制动器控制机器人脚踝上弹簧的压力,使其整体平稳向前。
“每走一步,制动参数都会有所改变,”泰德拉克说,“机器人可以在任何路面上走路,并调节走路的姿势。
”实际上,新型机器人在沙滩、草地和人行道等不同路面上走路时,能像人一样改变步伐的大小。
新型机器人还学会了在水车上走路,它配合水车倾斜度和速度的改变不断调节姿势。
它可以自动启动,并会向后倒着走。
动力设计节省能量众所周知,不换新电池的情况下,机器人用的能量越少,其操作时间越长。
新型机器人最大的优点莫过于它非常节能。
科学家在发明新型机器人时,运用了“被动动力设计”的原理和装置,使机器人依靠重心的改变和类似肌肉的弹簧和电动机带动其走路。
因此,此类机器人维持走路所需的能量仅仅相当于其他步行机器人的很小一部分。
为此,鲁伊纳对学步机器人颇为自得。
他说:“机器人要想实用,就必须能长时间运作。
”(朱磊)iStruct人形和类人猿机器人复杂的下肢系统具有43点压力传感器阵列,有望成为未来穿越遥远行星表面的探险家。
1.这款多腿机器人由德国人工智能研究中心和不来梅大学联合开发,体现了驱动式多点接触脚的优势,使用一套传感器监测脚和踝关节的精确运动。
这一机器人的灵感来源于生理学,是一种先进的平衡和运动系统。
该机器人可以平稳地前进、后退、侧行和斜行。
2.上图为机器人踝关节装制和带有传感器的脚的特写镜头。
其生物力学智能性很大程度上依赖于下肢脚和踝关节的结构。
脚跟处有距离传感器,数字三轴加速器,数字磁力轴角编码器和很多其他传感器。
3.人工智能研究中心图解显示的机器人仿生小腿设计。
4.具有人造脊椎和带有传感器的脚的类人猿机器人侧视图。
机器人创新中心表示,这款机器人是“太空机器人”研究领域的一部分,太空机器人项目致力于开发探索外星球的智能机器人。
5.由于脊柱内嵌入了电子设备,整体结构其实是一个六轴扭矩传感器。
6.图为研发过程中的机器人脊柱的CAD草图。
日本研制气动肌肉系统机器人宝宝可自动爬行点击数:993次录入时间:2011/5/12 15:17:00 编辑:walter-75 [宣传赚点]Pneuborn-7ll是一个7个月大的机器婴儿Pneuborn-13能够实现两足行走是不是有点可爱?Pneuborn-7ll坐在地上的样子爬行的Pneuborn-7ll北京时间5月12日消息,有时候工程师们会不知道究竟该不该给自己的机器人安装一张脸,不安装当然省事。
但是当你制造的机器人会爬向你,仿佛在喊你“妈妈!”,并且还能用它的金属双腿站立起来时,你就会陷入犹豫了。
机器人模拟性爱姿势机器人模拟性爱姿势机器人模拟性爱姿势机器人模拟性爱姿势机器人模拟性爱姿势机器人模拟性爱姿势机器人模拟性爱姿势查看原文/system/2015/06/19/056600386.shtmlPad版触屏版电脑版黑龙江日报报业集团概况| 东北网简介| 发展历程| 营销服务| 联系方式黑龙江东北网络台版权所有Copyright © 2001-2015 All RightsReserved.本网站为东北网版权所有,未经协议授权,禁止下载使用分享到百度一下现在,日本大阪大学细田实验室(Hosoda Laboratory)的研究人员开发出了两款机器人Pneuborn-7ll和Pneuborn-13,这是两种肌肉-骨骼婴儿机器人系统。
它们使用气动肌肉系统作为驱动,当然了,它们不可能真的喊你“妈妈”。
Pneuborn-7ll大约相当于一个7个月大的婴儿。
重量11.9磅(约合5.4公斤),高31英寸(约合0.787米)。
开发这一系统的目的是考察马达开发与实际应用之间的关系。
Pneuborn-7ll 完全自动,它全身拥有19个气动肌肉组件,它还拥有一根脊柱,上面有三个灵活的运动关节。
一个基于中枢模式发生器(CPGs)的算法系统,经过优化之后可以让机器人实现自动爬行,而无需用到人工智能或其他高级感应器。
Pneuborn-13 则是Pneuborn-7ll 的哥哥,相当于13个月大。
研制的目的是用来试验基于肌肉-骨骼结构机器人的两足行走技术。
它高29.5英寸(约0.75米),重8.5磅(约合3.85公斤)。
Pneuborn-13同样是一个自动机器人,但只有18个气动肌肉组件,主要集中于踝关节,膝盖和臀部,以便增强其两足行走时保持平衡的能力。
它缺乏脊柱系统,但仍然能保持直立姿态,并进行行走运动。
不过不幸的是,目前尚没有发布任何有关这两个机器人的视频资料,但应该很快就会发布出来。
而现在,你可以先想象一下它们走路的样子。
优必选Alpha机器人首测摘要:机器人这个词的诞生最早可以追溯到上世纪初,在1910年捷克斯洛伐克作家卡雷尔·恰佩克的科幻小说中,根据Robota和Robotnik,创...机器人这个词的诞生最早可以追溯到上世纪初,在1910年捷克斯洛伐克作家卡雷尔·恰佩克的科幻小说中,根据Robota和Robotnik,创造出“机器人”这个词。
经过一个世纪的演化,机器人也从抽象概念的小说中变为现实具体的存在。
如今,我们在许多领域中特别是危险的工作中,都会依靠这些人工智能的技术,它既可以接受指挥去行动,也能够根据预先编排的程序自动工作。
机器人的范畴随着它应用领域的不同而变得更广,贴在机器人身上的各种标签也越来越多,不过我们今天要给各位PChome网友介绍的这款机器人,更多的是能够帮助青少年培养创新能力、动手能力与普及机器人知识,它的名字叫做阿尔法智能机器人。
阿尔法智能机器人当然,作为一款具有人工智能的机器人,阿尔法的多用途绝对不局限于此,它具有基于unity3d开发的图形化动作编程界面可以让用户进行创造性的可视化编程,简易操作的编程让它拥有一个开放式的编程构架,所以不同的软件模块可以更好的相互作用,不论使用者的专业水平如何,都能够通过图像编程平台来为机器人编制程序。
只要你花心思去研究阿尔法独特的编程系统并熟悉掌握,阿尔法就能为你带来无限的可能,通过各种复杂的编程去体验各种不同的效果,让它能够用于竞赛、表演、教育、娱乐等等领域。
本次也是恰逢优必选来上海参加第13届中国(上海)国际玩具展览会,我们有幸拿到了这款时髦的产品,当然二话不出要为网友带来首发评测啦,下面我们就从开箱开始为各位细细解读这款阿尔法智能机器人。
刚才就给大家提到过优必选这次参加了第13届中国(上海)国际玩具展览会,在展会现场阿尔法智能机器人绝对是夺人眼球的,无论是牙牙学语的孩童还是带小朋友来的家长们,都被阿尔法现场的舞蹈所感染。
阿尔法智能机器人包装笔者是亲自去展会现场拿的这款机器人,回去时只好委屈它也跟着我挤了一回上海晚高峰的地铁,依靠着包装外观就能够看到的机器人图案,一路拎在手回头率非常高。
上海晚高峰时期的地铁坐过应该都知道这“环境”的严酷,但包装没有丝毫破碎,双层纸质包装的结实程度可见一般。
阿尔法智能机器人开箱开箱后就能看到阿尔法静静地躺在泡沫塑料分隔好的纸箱中,可以看到这款产品一打开就是完整的,无需担心需要自己装配组件,所以过一会儿就能让他生龙活虎。
阿尔法智能机器人配件阿尔法智能机器人的确是不需要组装的,不过在让它行动起来,我们还是要做一些准备工作的,首先我们就需要了解一下配件的功用,主要配件有电源适配器、数据线、遥控器、无线接收器、驱动光盘以及一本用户使用手册,光盘中除了产品本身的驱动程序外附有电子版的说明,方便用户参考使用。
其它的一些配件笔者实在不想太过啰嗦,相信凭借咱PChome网友的智商绝对不会被打倒的吧,所以还是挑重点与广大网友感兴趣的说。
阿尔法智能机器人遥控器所有的配件中最引人注意莫过于这款手柄外形的遥控器了,第一眼看去就像是PS、XBOX这种家用机的手柄,但是仔细看看的话似乎按键的组成有所不同,其实设计成这种造型笔者认为开发者主要是有二个因素的考虑:一者是用户习惯,就像常规的电视(参数图片文章)机等家用电器的遥控器的话,首先操作上就不太舒适,无妨将其灵活使用,若是像遥控赛车那种控制起来也不方便,所以类似于家用机的这种形式更能被大众接受。
二者是按键组成合理性,这种家用机的遥控器在按键数量上有较大的优势,而且还具有操控方向的摇杆。
阿尔法智能机器人遥控器遥控器的按键非常多,每一个按键都有相应的数字和与之相对应的动作,配合说明书与驱动软件能够很快掌握阿尔法智能机器人的基本操作。
UBT按键中间的UBT按键就是遥控器与机器人相连接的关键,开启机器人后我们只需要长按5秒UBT按键直到灯闪烁就能够唤醒遥控器。
遥控器肩键和传统家用机遥控器一样,阿尔法智能机器人的遥控器也拥有肩键,这些按键能帮助我们更方便操作使用机器人。
3节5号电池供电阿尔法智能机器人的遥控器需要3节5号电池供电,遥控器配合机器人内部2.4G 高速通讯模块完成无线操作。
阿尔法智能机器人机器人,机器人,要是没有一个人的形态当然谈不上机器人,采用现在机器人领域相当高级的ARM控制器,加上多达16个自由控制关节的舵机,让阿尔法智能机器人无论是在舞蹈、拳击还是形体表演上都可以达到最大化的伸展。
阿尔法智能机器人头部特写阿尔法智能机器人的头部非常可爱,圆球一样的造型看起来非常卡通时尚,开启电源后能够看到在眼部与耳部都有LED蓝光显示,其实阿尔法的头部应该算是最为静态的,官方给出的操作提示中也有说到,如果你的阿尔法在开启误导后你无法掌控请抓取头部(笔者觉得只有萌妹子才会不敢碰他)。
后脑勺内置喇叭,在舞蹈的同时会随之播放音乐,随着节拍舞动起来,阿尔法还能用它自我介绍与给你讲故事。
舵机与LED阿尔法机器人含有若干个舵机,每一个舵机都具有相应固定的编号(ID),各种编号在驱动软件上都会明确标注,让用户在操作阿尔法的时候能够得心应手地调整关节的转角和速度。
阿尔法智能机器人肢体灯效在阿尔法智能机器人肢体部位的舵机上也会散发出各种色彩的LED灯,开启后看起来非常酷炫。