电大机械设计基础形成性考核作业答案1
2024年春国家开放大学机械设计基础形考任务1试题与答案

国开电大机械设计基础形考任务1答案1.机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
A.对B.错题目1答案:对2.机构都是可动的。
A.对B.错题目2答案:对3.机构中的主动件和从动件,都是构件。
A.对B.错题目3答案:对4.机器是由机构组合而成的,机构的组合一定就是机器。
A.对B.错题目4答案:错5.作用于刚体上某点的力,作用点沿其作用线移动后,其对刚体的作用效果改变了。
A.对B.错题目5答案:错6.在两个力作用下的构件称为二力构件。
A.对B.错题目6答案:错7.合力一定大于分力。
A.对B.错题目7答案:错8.力偶无合力。
A.对B.错题目8答案:对9.刚体上作用力偶的力偶矩大小与矩心的具体位置无关。
A.对B.错题目9答案:对10.组成移动副的两构件之间的接触形式,只有平面接触。
A.对B.错题目10答案:对11.在平面机构中,齿轮副是低副。
A.对B.错题目11答案:错12.作用在刚体上的二力平衡条件是_______。
A.大小相等、方向相反、作用线相同、作用在两个相互作用物体上B.大小相等、方向相反、作用线相同、作用在同一刚体上C.大小相等、方向相同、作用线相同、作用在同一刚体上D.大小相等、方向相反、作用点相同题目12答案:大小相等、方向相反、作用线相同、作用在同一刚体上13.取分离体画受力图时,以下说法错误的是_______。
A.铰链约束力的指向可以假定,光滑面约束力的指向不能假定。
B.固定端约束力的指向可以假定,柔体约束力的指向不能假定。
C.固定端约束力的指向可以假定,柔体约束力的指向不能假定。
D.柔体约束力的指向可以假定,正压力的指向不能假定。
题目13答案:柔体约束力的指向可以假定,正压力的指向不能假定。
14.下图所示的受力系统中,不计杆AB、杆BC和绳DE的自重,则杆AB的正确受力图为_______。
题目14答案:C15.力偶对物体的作用效果,取决于下列因素_______。
机械设计基础课程形成性考核作业及答案

机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,__CEF__力得指向可以假定,__ABDG__力得指向不能假定。
A.光滑面约束力B。
柔体约束力 C.铰链约束力D。
活动铰链反力E。
固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__得方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便。
A.与已知力垂直B。
与未知力垂直C.与未知力平行D。
任意E.已知力作用点 F.未知力作用点G.两未知力交点H.任意点3。
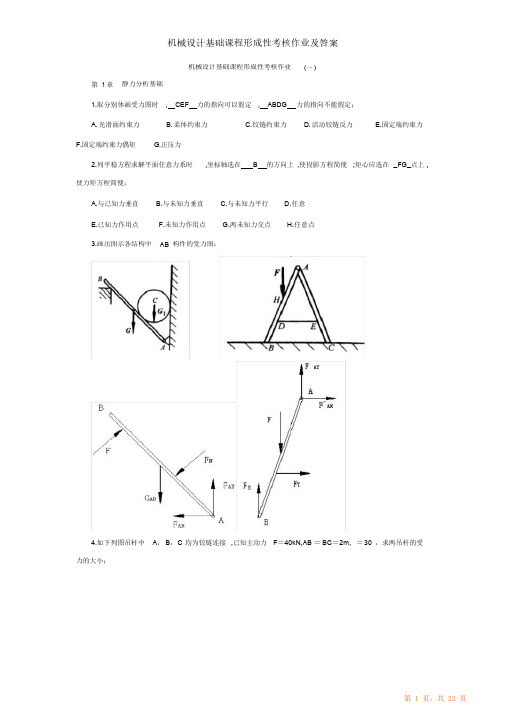
画出图示各结构中AB构件得受力图。
4。
如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,α=30︒、求两吊杆得受力得大小.解:受力分析如下图列力平衡方程:又因为AB=BC第2章常用机构概述1.机构具有确定运动得条件就是什么?答:当机构得原动件数等于自由度数时,机构具有确定得运动2。
什么就是运动副?什么就是高副?什么就是低副?答:使两个构件直接接触并产生一定相对运动得联接,称为运动副。
以点接触或线接触得运动副称为高副,以面接触得运动副称为低副.3.计算下列机构得自由度,并指出复合铰链、局部自由度与虚约束。
(1)n=7,P L=10,PH=0 (2)n=5,P L=7,P H=0C 处为复合铰链(3)n=7,PL=10,PH=0(4)n=7,P L=9,P H=1E、E’有一处为虚约束 F 为局部自由度C处为复合铰链第3章平面连杆机构1。
对于铰链四杆机构,当满足杆长之与得条件时,若取_C_为机架,将得到双曲柄机构.A。
最长杆B。
与最短杆相邻得构件C.最短杆D.与最短杆相对得构件2.根据尺寸与机架判断铰链四杆机构得类型。
a)双曲柄机构b)曲柄摇杆机构c)双摇杆机构d)双摇杆机构3.在图示铰链四杆机构中,已知,l BC=150mm,lCD=120mm,l AD=100mm,AD为机架;若想得到双曲柄机构,求lAB得最小值。
国家开放大学机械设计基础形成性考核习题及答案
在A点右截面, kN
在C点左截面, kN
在C点右截面, kN
在B点左截面, kN
在B点右截面, 画出剪力图,如下图:
同理我们根据几何关系求处几处弯矩值:
Байду номын сангаас在A点,
在D点, 画出弯矩图,如下图:
最大
(b)
第7章 构件的强度和刚度
1.在作低碳钢的拉伸试验时,整个拉伸过程大致可分为四个阶段,依次为_弹性阶段_,__屈服阶段_,__强化阶段__,_缩径断裂阶段_。
a)b)c)d)
C 轴承无法拆卸,应将轴肩高度低于轴承内圈
第14章 轴 承
1.写出下列轴承代号表示的内容,说明该轴承适用的场合。
7208,32314,6310/P5,7210B,N2222
2.如图所示,轴的两端用两个角接触球轴承7207C正装。常温下工作。工作中有中等冲击。转速n=1800r/min,两轴承的径向载荷分别是FrI=3400N,FrII=1050N,轴的轴向载荷Fa=870N,方向指向轴承2,试确定哪个轴承危险,并计算出危险轴承的寿命。
(1)降低传动效率;
(2)从动轮的圆周速度低于主动轮,造成传动比误差;
(3)带的磨损;
(4)发热使带温度升高。
打滑造成带的磨损加剧,无法传递动力,致使传动失效。
2.试分析增速带传动工作时,其最大应力在哪里
带紧边刚绕出小带轮处
3.V带传动n1=1450r/min,fv=,包角?=150°,预紧力F0=360N。试问:
解:
7.两级平行轴斜齿圆柱齿轮传动如图所示,高速级mn=3mm,?1=15°Z2=51;低速级mn=5mm,Z3=17试问:
(1)低速级斜齿轮旋向如何选择才能使中间轴上两齿轮轴向力的方向相反
(国家开放大学)机械设计基础形成性考核习题与答案

机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,__CEF__力的指向可以假定,__ABDG__力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__的方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便。
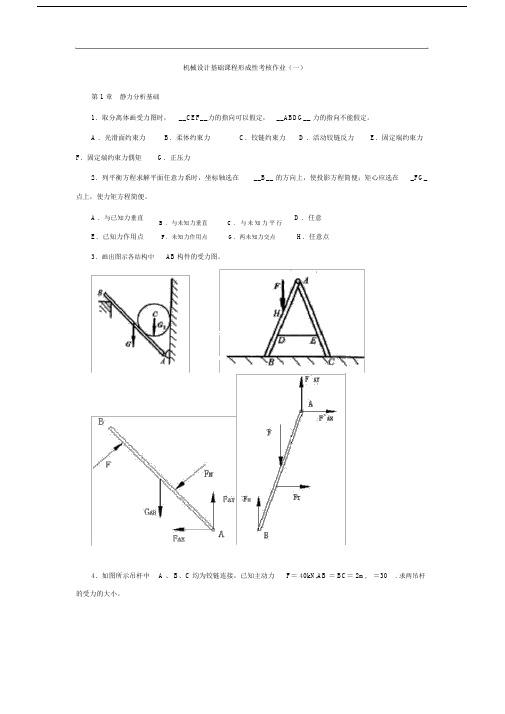
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,=30.求两吊杆的受力的大小。
解:受力分析如下图列力平衡方程:Fx0又因为AB=BCF A sinF C sinF A FCFy02F A sinFFF A F B40KN2sin第2章常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
(1)n=7,P L=10,P H=0(2)n=5,P L=7,P H=0F3n2P L PF3n2P L P HH37210352711C处为复合铰链(3)n=7,P L=10,P H=0(4)n=7,P L=9,P H=1F3n2P L PF3n2P L P HH372103729112E、E’有一处为虚约束F为局部自由度C处为复合铰链第3章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C_为机架,将得到双曲柄机构。
A.最长杆B.与最短杆相邻的构件C.最短杆D.与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类型。
机械设计基础形成性考核作业(一)答案
形成性考核作业专业名称机电一体化技术课程代码110035课程名称机械设计基础学号姓名班级评阅教师第 1 次作业共 5 次作业江苏开放大学作业内容:第1单元-概论1.人们常说的机械的含义是什么?机器与机构的区别是什么?指出下列设备中哪些是机构:铣床、发电机、机械式手表、洗衣机和汽车。
【解答】人们常说的机械的含义是:机器。
机器与机构的区别:机器是由一个或者多个机构组成的,机构只能传递运动或者动力,不能直接做有用的机械功或者进行能量转化。
发电机,机械式手表属于机构。
2.什么是构件、零件?构件与零件的区别是什么?【解答】从制造的角度看,组成机器的这些实物,我们称之为零件。
零件是组成机器的,也是机器中不可拆分的。
组成机器的各实体间具有确定的相对运动,从运动的角度看,机器是由若干个运动的单元所组成,这种具有独立运动的最小实体,称为构件。
构件可以是单一的机械零件,也可以是若干机械零件的刚性组合,零件没有相对运动。
3.请查阅相关资料,各举出一个具有下述功能的机器的实例:(1)变换机械能为其他形式能量;(2)变换或传递信息;(3)传送物料;(4)传递机械能。
【解答】1. 变换机械能为其他形式能量:风机;2. 变换或传递信息:电话机;3. 传送物料:螺旋传输机; 4. 传递机械能:内燃机4.指出下列机器的动力部分、传动部分、控制部分和执行部分。
(1)汽车;(2)自行车;(3)车床。
【解答】 1. 汽车的动力部分为发动机,传动部分为变速箱,控制部分为油门,刹车,离合器;执行部分为轮子;2.自行车的动力部分为人踏脚踏板,传动部分为链条和前后齿轮,控制部分为龙头和刹车,执行部分为后轮;3. 车床的动力部分为电动机,传动部分为连着电动机轴上的主轴,变速箱,齿轮箱,控制部分为电控箱内的接触器,继电器,行程开关;执行部分为车刀;第2单元-平面机构的静力学分析1.三力汇交于一点的力系一定是平衡力系这句话对吗?你是如何理解三力平衡汇交定理的。
国家开放大学最新《机械设计基础》形考任务(1-10)试题及答案解析

国家开放大学最新《机械设计基础》形考任务(1-10)试题及答案解析形考任务 1题目1正确获得1.00分中的1.00分标记题目题干机器是由机构组合而成的,机构的组合一定就是机器。
选择一项:对错反馈正确答案是:“错”。
题目2正确获得1.00分中的1.00分标记题目题干机构都是可动的。
选择一项:对错反馈正确答案是:“对”。
题目3正确获得1.00分中的1.00分标记题目题干所有构件一定都是由两个以上零件组成的。
选择一项:对错反馈正确答案是:“错”。
题目4正确获得4.00分中的4.00分标记题目题干1.如图所示,已知一重量的物体放在水平面上,水平面和物体间的摩擦系数。
请分析下列情况:(1)(4分)当作用在物体上的水平力时,回答。
A.摩擦力为0,物体处于平衡状态B.摩擦力为10N,物体处于平衡状态C.摩擦力为20N,物体处于平衡状态D.摩擦力为40N,物体滑动(2)(4分)当作用在物体上的水平力时,回答A.摩擦力为0,物体处于平衡状态B.摩擦力为10N,物体处于平衡状态C.摩擦力为20N,物体处于平衡状态D.摩擦力为40N,物体滑动(3)(4分)当作用在物体上的水平力时,回答A.摩擦力为0,物体处于平衡状态B.摩擦力为10N,物体处于平衡状态C.摩擦力为20N,物体处于平衡状态D.摩擦力为40N,物体滑动形考任务 2题目1正确获得1.00分中的1.00分标记题目题干只受两个力作用但不保持平衡的物体是二力构件。
选择一项:对错反馈正确答案是:“错”。
题目2正确获得1.00分中的1.00分标记题目题干悬挂的小球静止不动是因为小球对绳向下的重力和绳对小球向上的拉力相互抵消的缘故。
选择一项:对错反馈正确答案是:“错”。
题目3正确获得1.00分中的1.00分标记题目题干作用于刚体上某点的力,作用点沿其作用线移动后,不改变原力对刚体的作用效果。
选择一项:对错反馈正确答案是:“对”。
题目4正确获得1.00分中的1.00分标记题目题干刚体上作用力偶的力偶矩大小与矩心的具体位置无关。
机械设计基础形考网考形成性考核册-国家开放大学电大

机械设计基础课程形成性考核作业(一)
第1章静力分析基础
1.取分离体画受力图时,_______力的指向可以假定,_______力的指向不能假定。
A.光滑面约束力 B.柔体约束力 C.铰链约束力 D.活动铰链反力
E.固定端约束力 F.固定端约束力偶矩 G.正压力
2.列平衡方程求解平面任意力系时,坐标轴选在______的方向上,使投影方程简便;矩心应选在_____点上,使力矩方程简便。
A.与已知力垂直 B.与未知力垂直 C.与未知力平行 D.任意 E.已知力作用点 F.未知力作用点 G.两未知力交点 H.任意点
3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,=30.求两吊杆的受力的大小。
第2章常用机构概述
1.机构具有确定运动的条件是什么?
2.什么是运动副?什么是高副?什么是低副?
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
第2章常用机构概述
1.机构具有确定运动的条件是什么?
2.什么是运动副?什么是高副?什么是低副?
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
第3章平面连杆机构
1.对于铰链四杆机构,当满足杆长之和的条件时,若取___为机架,将得到双曲柄机构。
A.最长杆 B.与最短杆相邻的构件 C.最短杆 D.与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类型。
3.在图示铰链四杆机构中,已知,lBC=150mm ,lCD=120mm,lAD=100mm,AD为机架;若想得到双曲柄机构,求lAB的最小值。
电大数控专业形成性考核答案:机械设计基础

机械设计基础课程形成性考核作业答案(一)第1章 静力分析基础1. C 、E 、F A 、B 、D 、G2. B F 、G3.4.解:受力分析如下图列力平衡方程:∑=0Fx又因为 AB=BCααsin sin C A F F =⋅C A F F =∑=0FyF F A =⋅αsin 2 KN F F F B A 40sin 2===∴α第2章 常用机构概述1.答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.机构的自由度计算(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =7253⨯-⨯1= 1=C 处为复合铰链(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =19273-⨯-⨯1= 2=E 、E ’有一处为虚约束F 为局部自由度C 处为复合铰链第3章 平面连杆机构1.C2.a )双曲柄机构 b )曲柄摇杆机构 c )双摇杆机构 d )双摇杆机构3.解:要得到双曲柄机构,因此AD 杆必须为最短杆;若AB 为最长杆,则AB ≥BC =150mm若BC 为最长杆,由杆长条件得:CDAB BC AD l l l l +≤+mm l l l l CD BC AD AB 130=-+≥因此AB l 的最小值为130mm4.如下图:第4章 凸轮机构1.凸轮 推杆 机架2.尖顶 滚子 平底3.盘形 圆柱 曲面4.解:(1)mm r L R R T 15515250=+-=+-=(2)(3)mm R r R L H T 3015515250=-++=-++=(4)mm L rT R S 98.25)(22=-+=第5章 其他常用机构1.棘轮机构槽轮机构不完全齿机构2.左旋右旋三角形矩形梯形锯齿形3.答:导程S:在同一螺纹线上相邻两螺纹牙之间距离。
机械设计基础课程形成性考核作业答案(一)

机械设计基础课程形成性考核作业答案(一)第1章 静力分析基础1. C 、E 、F A 、B 、D 、G2. B F 、G3.4.解:受力分析如下图列力平衡方程:∑=0Fx又因为 AB=BCααs i n s i n C A F F =⋅C A F F =∑=0FyF F A =⋅αs i n 2 KN F F F B A 40sin 2===∴α第2章 常用机构概述1.答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.机构的自由度计算(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =7253⨯-⨯1= 1=C 处为复合铰链(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =19273-⨯-⨯1= 2=E 、E ’有一处为虚约束F 为局部自由度C 处为复合铰链第3章 平面连杆机构1.C2.a )双曲柄机构 b )曲柄摇杆机构 c )双摇杆机构 d )双摇杆机构3.解:要得到双曲柄机构,因此AD 杆必须为最短杆;若AB 为最长杆,则AB ≥BC =150mm若BC 为最长杆,由杆长条件得:CD AB BC AD l l l l +≤+mm l l l l CD BC AD AB 130=-+≥因此AB l 的最小值为130mm4.如下图:第4章 凸轮机构1.凸轮 推杆 机架2.尖顶 滚子 平底3.盘形 圆柱 曲面4.解:(1)mm r L R R T 15515250=+-=+-=(2)(3)mm R r R L H T 3015515250=-++=-++=(4)mm L rT R S 98.25)(22=-+=第5章 其他常用机构1.棘轮机构 槽轮机构 不完全齿机构2.左旋 右旋 三角形 矩形 梯形 锯齿形3.答:导程S :在同一螺纹线上相邻两螺纹牙之间距离。
机械设计基础课程形考网考形成性考核-国家开放大学电大本科
机械设计基础课程形成性考核作业(一)
第1章静力分析基础
1.取分离体画受力图时,_______力的指向可以假定,_______力的指向不能假定。
A.光滑面约束力 B.柔体约束力 C.铰链约束力 D.活动铰链反力
E.固定端约束力 F.固定端约束力偶矩 G.正压力
2.列平衡方程求解平面任意力系时,坐标轴选在______的方向上,使投影方程简便;矩心应选在_____点上,使力矩方程简便。
A.与已知力垂直 B.与未知力垂直 C.与未知力平行 D.任意 E.已知力作用点 F.未知力作用点 G.两未知力交点 H.任意点
3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,=30.求两吊杆的受力的大小。
第2章常用机构概述
1.机构具有确定运动的条件是什么?
2.什么是运动副?什么是高副?什么是低副?
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
第2章常用机构概述
1.机构具有确定运动的条件是什么?
2.什么是运动副?什么是高副?什么是低副?
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
第3章平面连杆机构
1.对于铰链四杆机构,当满足杆长之和的条件时,若取___为机架,将得到双曲柄机构。
A.最长杆 B.与最短杆相邻的构件 C.最短杆 D.与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类型。
3.在图示铰链四杆机构中,已知,lBC=150mm ,lCD=120mm,lAD=100mm,AD为机架;若想得到双曲柄机构,求lAB的最小值。
机械设计基础形考作业答案

机械设计基础课程形成性考核作业(一)第 1 章静力分析基础1.取分离体画受力图时, C、E、F 力的指向可以假定, A 、B、D、 G 力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在 ___B___的方向上,使投影方程简便;矩心应选在 __G___点上,使力矩方程简便。
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB 构件的受力图。
4.如图所示吊杆中 A 、B、C 均为铰链连接,已知主动力F= 40kN,AB =BC= 2m, = 30 .求两吊杆的受力的大小。
列力平衡方程:Fx 0又因为AB=BCF A s i n F C s i nF A F CFy 02F A s i n FF A F BF40KN 2 sin第 2 章常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
机构的自由度计算( 1)n=7,P L=10, P H=0(2)n=5,P L=7,P H=0F 3n 2P L P H F 3n 2P L P H37210352711C处为复合铰链(3)n=7, P L= 10,P H=0(4)n=7,P L=9,P H=1F 3n 2P L P H F 3n 2P L P H372103729112E、E’有一处为虚约束 F 为局部自由度C 处为复合铰链第 3 章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_ C __为机架,将得到双曲柄机构。
机械设计基础课程形成性考核作业及答案

机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,__CEF__力的指向可以假定,__ABDG__力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力 F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__的方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便。
A.与已知力垂直B.与未知力垂直C.与未知力平行 D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,α=30︒.求两吊杆的受力的大小。
解:受力分析如下图列力平衡方程:∑=0Fx又因为 A B=BCααsin sin C A F F =⋅C A F F =∑=0FyF F A =⋅αsin 2KN FF F B A 40sin 2===∴α第2章 常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动 2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
(1)n =7,PL =10,PH =0 (2)n=5,P L =7,P H =0H L P P n F --=23H L P P n F --=23=10273⨯-⨯=7253⨯-⨯1=1=C 处为复合铰链 (3)n =7,PL=10,P H =0 (4)n=7,P L=9,PH =1H L P P n F --=23H L P P n F --=23=10273⨯-⨯=19273-⨯-⨯1=2=E 、E ’有一处为虚约束F 为局部自由度C 处为复合铰链第3章 平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C_为机架,将得到双曲柄机构。
国家开放大学最新《机械设计基础》形考任务(1-10)试题及答案解析
国家开放大学最新《机械设计基础》形考任务(1-10)试题及答案解析形考任务 1题目1正确获得1.00分中的1.00分标记题目题干机器是由机构组合而成的,机构的组合一定就是机器。
选择一项:对错反馈正确答案是:“错”。
题目2正确获得1.00分中的1.00分标记题目题干机构都是可动的。
选择一项:对错反馈正确答案是:“对”。
题目3正确获得1.00分中的1.00分标记题目题干所有构件一定都是由两个以上零件组成的。
选择一项:对错反馈正确答案是:“错”。
题目4正确获得4.00分中的4.00分标记题目题干1.如图所示,已知一重量的物体放在水平面上,水平面和物体间的摩擦系数。
请分析下列情况:(1)(4分)当作用在物体上的水平力时,回答。
A.摩擦力为0,物体处于平衡状态B.摩擦力为10N,物体处于平衡状态C.摩擦力为20N,物体处于平衡状态D.摩擦力为40N,物体滑动(2)(4分)当作用在物体上的水平力时,回答A.摩擦力为0,物体处于平衡状态B.摩擦力为10N,物体处于平衡状态C.摩擦力为20N,物体处于平衡状态D.摩擦力为40N,物体滑动(3)(4分)当作用在物体上的水平力时,回答A.摩擦力为0,物体处于平衡状态B.摩擦力为10N,物体处于平衡状态C.摩擦力为20N,物体处于平衡状态D.摩擦力为40N,物体滑动形考任务 2题目1正确获得1.00分中的1.00分标记题目题干只受两个力作用但不保持平衡的物体是二力构件。
选择一项:对错反馈正确答案是:“错”。
题目2正确获得1.00分中的1.00分标记题目题干悬挂的小球静止不动是因为小球对绳向下的重力和绳对小球向上的拉力相互抵消的缘故。
选择一项:对错反馈正确答案是:“错”。
题目3正确获得1.00分中的1.00分标记题目题干作用于刚体上某点的力,作用点沿其作用线移动后,不改变原力对刚体的作用效果。
选择一项:对错反馈正确答案是:“对”。
题目4正确获得1.00分中的1.00分标记题目题干刚体上作用力偶的力偶矩大小与矩心的具体位置无关。
00722《机械设计基础#》形成性考核参考答案
00722《机械设计基础#》形成性考核参考答案常晓斌《机械设计基础#》形成性考核1参考答案第一章静力分析基础题目1 取分离体画受力图时,回答力的指向可以假定,_______力的指向不能假定。
(答案直接写字母,连写中间不加任何符号)A.光滑面约束力 B.柔体约束力 C.铰链约束力 D.活动铰链反力E.固定端约束力 F.固定端约束力偶矩 G.正压力正确答案是:CEFABDG题目2 列平衡方程求解平面任意力系时,坐标轴选在回答的方向上,使投影方程简便;矩心应选在_____点上,使力矩方程简便。
(答案直接写字母,中间不加任何符号)A.与已知力垂直 B.与未知力垂直 C.与未知力平行 D.任意E.已知力作用点 F.未知力作用点 G.两未知力交点 H.任意点正确答案是:BFG题目3画出图示各结构中AB构件的受力图。
(可自行在软件或纸上绘制草图上传即可)正确答案是题目4如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,角度=30°.求两吊杆的受力的大小。
第2章常用机构概述题目5机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动。
题目6什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
题目7计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
第3章平面连杆机构题目8对于铰链四杆机构,当满足杆长之和的条件时,若取___为机架,将得到双曲柄机构。
选择一项:a. 与最短杆相对的构件b. 最长杆c. 最短杆d. 与最短杆相邻的构件正确答案是:最短杆题目9根据尺寸和机架判断铰链四杆机构的类型。
答:a)双曲柄机构b)曲柄摇杆机构c)双摇杆机构d)双摇杆机构题目10在图示铰链四杆机构中,已知,lBC=150mm ,lCD=120mm,lAD=100mm,AD为机架;若想得到双曲柄机构,求lAB的最小值。
机械设计基础课程形成性考核作业及答案(精华版)
机械设计基础课程形成性考核作业(一)第 1 章静力分析基础1.取分别体画受力图时, CEF 力的指向可以假定, ABDG 力的指向不能假定;A. 光滑面约束力B. 柔体约束力C.铰链约束力D. 活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平稳方程求解平面任意力系时,坐标轴选在 B 的方向上,使投影方程简便;矩心应选在_FG_点上, 使力矩方程简便;A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB 构件的受力图;4.如下列图吊杆中A,B,C 均为铰链连接,已知主动力F=40kN,AB =BC=2m, =30 ,求两吊杆的受力的大小;解: 受力分析如下图列力平稳方程 :Fx 0又由于 AB=BCF A sin F C sinF A F CFy 02 F A sin FF2 sin F F 40KNA B 第 2 章 常用机构概述1.机构具有确定运动的条件就是什么 .答: 当机构的原动件数等于自由度数时 , 机构具有确定的运动2.什么就是运动副?什么就是高副?什么就是低副?答: 使两个构件直接接触并产生肯定相对运动的联接 ,称为运动副;以点接触或线接触的运动副称为高副 ,以面接触的运动副称为低副;3.运算以下机构的自由度 ,并指出复合铰链,局部自由度与虚约束;(1) n=7,P L=10,P H=0 (2)n=5,P L=7,P H=0F 3n 2 PP H F 3n 2 P L P HL37210 352711C 处为复合铰链(3) n=7,P L =10,P H=0 (4) n=7,P L=9,P H=1F 3n 2 PP H F 3n 2 P L P HL37210 3 7 29112E,E ’有一处为虚约束 F 为局部自由度C 处为复合铰链第 3 章平面连杆机构1.对于铰链四杆机构,当满意杆长之与的条件时,如取_C_ 为机架,将得到双曲柄机构;A.最长杆B. 与最短杆相邻的构件C.最短杆D. 与最短杆相对的构件2.依据尺寸与机架判定铰链四杆机构的类型;a)双曲柄机构b) 曲柄摇杆机构c) 双摇杆机构d) 双摇杆机构3.在图示铰链四杆机构中,已知,l BC=150mm ,l C D=120mm, l AD =100mm,AD 为机架; 如想得到双曲柄机构,求l AB 的最小值;解: 要得到双曲柄机构,因此AD 杆必需为最短杆;如AB 为最长杆,就AB ≥BC=150mm如BC 为最长杆,由杆长条件得:l l BC l l CDAD ABl l l BC l CD 130mmAB ADl因此的最小值为130mmAB4.画出各机构的压力角传动角;箭头标注的构件为原动件;.如下图:第 4 章凸轮机构1.凸轮主要由凸轮, 推杆与机架三个基本构件组成;2.凸轮机构从动件的形式有尖顶_从动件,_滚子_从动件与_平底从动件;3.按凸轮的外形可分为盘形_凸轮,_圆柱_凸轮与曲面凸轮;R=25mm, 凸轮轴心到圆盘中心的距离4. 已知图示凸轮机构的偏心圆盘的半径L=15mm , 滚子半径r T=5mm;试求:(1)凸轮的基圆半径R O=解:(1) R0R L r T25 15 515mm(2)22(4) S( R r T ) L(R L) r T(2)画出图示机构的压力角(3)推杆的最大行程H=?(3) H L R r T R025 15 5 15 30mm(4)图示位置从动件的位移S=?22S (R r) L(R L) r TT第 5 章其她常用机构1.常用的间歇运动机构有棘轮机构,_槽轮机构_与_不完全齿机构_等几种;2.螺纹的旋向有_左旋与_右旋_,牙形有_三角形_,_矩形_,_梯形_,与_锯齿形_;3.螺纹的导程S 与线数n 及螺距P 之间的关系就是什么?答:导程S:在同一螺纹线上相邻两螺纹牙之间距离;线数n: 在同一圆柱面上制造螺纹线的数目;螺距p: 相邻两螺纹牙平行侧面间的轴向距离;S np因此机械设计基础课程形成性考核作业(二)第六章构件内力分析1.什么就是构件的强度?什么就是构件的刚度?强度就是构件抗击破坏的才能,满意强度要求就是指在外力作用下构件不发生破坏;刚度就是构件抗击变形的才能,满意刚度要求就是指在外力作用下构件的弹性变形量不超过答应的限度;2.画出图示各杆的轴力图,并运算最大轴力N max;N max 40KN 最大轴力 N max 3P最大轴力 3.画出图示圆轴的扭矩图 ,已知 M A =5kN · m,M B =2kN · m ;4.画出图示各梁的剪力图与弯矩图 ,并运算最大 Q max 与 M max ;(a)(1) 解 :求支反力M0 4 R B M 2 F0 AM0 4 RA M 2 F0BR A kN R B kN由Y 0 得知支反力运算无误;由几何关系我们得知求出几个重要点的剪力与弯矩值我们就可以画处图像;下面我们开头求在以下几处的剪力值:A 点左截面, Q 0在A 点右截面, Q R A kN在C 点左截面, Q R A在kNC 点右截面, Q R B在kNB 点左截面, Q R B在kNB 点右截面, Q 0在画出剪力图, 如下图:同理我们依据几何关系求处几处弯矩值:在A 点, M0M C R A2M R A2MC右在D 点, M0画出弯矩图, 如下图:Qmax M M最大max(b)解:此题解法与上个题步骤基本相同,我们也可以用另外一种方法解题,下面我们用另外一种解法进行求解:求支反力M0 4 RB 2q 2 0AM0 4 RA 2q 20BR A10 kN R B10 kNY 0 得知由支反力运算无误;由于各段受力情形不同可以分段求解AC 段Q RA10 KNM R A x 10xCD 段:Q RAq(x 1) 20 10 x22 M RAx q( x 1) / 2 10 x 5( x 1) DB 段:Q RA2q 10KNM R A x 2q( x 2) 10x 40依据上面所求函数我们画剪力与弯矩图如下Q max 10KN M 15KN M最大 max (c)解: 求支反力lq 2 3 4 2M 0 R B l l qa 0A ql 2 14 2 M 0 R A l qa l 0B 2 2 1 8 qa l 3 8 qa l R A ql R B ql Y 0 得知 支反力运算无误;由依据几何关系我们知道剪力图 AC 为一水平直线 ,CB 为一条斜线 ,我们求出关键的点就可以画出线图;A 点稍左 , Q在 21 ql8qa l A 点稍右 , Q在 R A2ql 2 3 8qa l在 B 点稍左 , QR A ql B 点稍右 , Q在 依据上面数值可做剪力图;依据几何关系 ,AC 段没有载荷作用 ,弯矩图为一条斜直线 ;在 C 点有集中力偶 , 弯矩图有突变 , CB 段有均布载荷作用 ,弯矩图就是一条抛物线;为了做弯矩图,只需求出梁在下面各截面处的弯矩值:M 0在点 A,2l2 1 16 qa2 2ql在 C 点左截面MR A2l 21 16 qa22qa2ql在 C 点右截面MR AM 0在点 B,此外由剪力图知道 ,在 CB 段内有一截面的剪力为零 , 这个截面的弯矩就是梁 CB 段内弯矩的极值; 即该点的剪力 Q D =0,令点 D 的坐标为 x,, 即:Q D R A q( x l / 2) 0得25 8alxl 此点的弯矩值为 :2q( x l / 2)2 2M R A x qaD 491283 8qa 2l22 ql qa 2依据上面数值可做剪力图弯矩图如下:243 8qa l91283 8qa 2l22 最大 Q m axql M maxql qa KNKN , M2第 7 章 构件的强度与刚度 1.在作低碳钢的拉伸试验时 ,整个拉伸过程大致可分为四个阶段, 依次为 _弹性阶段 _,屈服阶段 _, 强 化阶段 ,_缩径断裂阶段 _;2.通常塑性材料的极限应力取 _屈服极限 _, 脆性材料的极限应力取 _强度极限 _;3.如图 7-35 所示变截面杆 AC, 在 A , B 两处分别受到 50kN 与 140kN 的力的作用 ,材料 E =200GPa ;试 求:(1) 画出轴力图 ;(2) 求各段正应力 ;(3)求总变形量;解:(1)3FA 50 10100MPa(2)AB 段15 10213F A 90 10 10 90MPaBC 段 21022103103F l 50 200 1000 500N 1 1 l (缩短 )(3)AB 段 :1EA 1 3 90 101000F l N 2 2 l (伸长 )BC 段23200 10 EA 10002ll 1l 2(缩短) 4.一矩形截面梁 ,承担载荷 F=10KN, 材料的许用应力 [ ]=160MPa, 试确定横截面尺寸;解: 求支反力;M 0 R A 2 F 1 0 B M 0R B 2 F 1 0 AR A 5 K N R B5KNM 5 K N mmaxMW5KN bh6m max2666 b 5 10 6 5 10 ( 2b) 24b31065 1061606 5 46 b336mm34 截面宽 b = 36mm 高 h =2b =72mm5.如下列图的圆形横截面的梁 ,承担载荷 F = 10kN,M = 20kN · m,梁长 a = 2m, 材料的许用应力 [ σ ] =160MPa,试求 :(1)梁 A ,B 端的约束力 ; (2)画出剪力图与弯矩图 ;(3)如 d =70mm,校核梁的强度;解:(1) 求约束力M 0 R A 4 F 2 M 0B M 0R B 4 F 2 M 0AR A10 KNR B(2)画剪力图 ,弯矩图 :106M20max 594 M Pa(3) >3W 7032所以此梁担心全;机械设计基础课程形成性考核作业(三)第8 章齿轮传动1.渐开线齿廓外形取决于_C_直径大小;A.节圆B. 分度圆C.基圆D. 齿顶圆2.对于标准直齿圆柱齿轮,打算齿廓外形的基本参数就是_齿数_,_ 压力角_,_变位系数_;3.标准外啮合斜齿轮传动的正确啮合条件就是:两齿轮的_法面_模数与_法面压力角_都相等,齿轮的_螺旋_角相等,旋向相反;4.采纳展成法加工正常齿齿轮时,不发生根切的最少齿数就是_17_5.一对齿轮啮合时,两齿轮的 C _始终相切;A.分度圆B.基圆C.节圆D.齿根圆6.已知一标准渐开线直齿圆柱齿轮,其齿顶圆直径d a1=77,5mm, 齿数z1=29;现要求设计一个大齿轮与其相啮合,传动的安装中心距a=145mm,试运算这个大齿轮的主要尺寸;(分度圆直径d2,齿顶圆直径d a2,齿根圆直径d f2,基圆直径d b2)d解:a1 (z12ha*) mma m( zz2 ) / 21z287mmd 2mz287d a 2 ( z 2 2ha*) m d f 2 ( z 22ha * 2c*)d bd 2 cos7.两级平行轴斜齿圆柱齿轮传动如下列图 ,高速级 m n = 3mm, 1= 15° Z 2 = 51;低速级 m n = 5mm,Z 3= 17试问 :(1)低速级斜齿轮旋向如何挑选才能使中间轴上两齿轮轴向力的方向相反 .低速级斜齿轮旋向为左旋 ,才能使中间轴上两齿轮轴向力相反 (2)低速级齿轮取多大螺旋角2 才能使中间轴的轴向力相互抵消.F t 2tgF t 3 tg 122T II d 2 2T II d 3F t 2 F t 3tgcostg 2 cos2T II d 22T IId 3112tgtg→12m n 2 Z 2m n3 Z 3sinm n3 Z 31sin2m n 2 Z 28, 27°28.单级闭式直齿圆柱齿轮传动 ,已知小齿轮材料为 45 钢, 调质处理 ,大齿轮材料为 ZG45, 正火处理 ,已知传 递功率 P l =4kW,n 1=720r/min, m = 4mm,z l =25,z 2 =73,b 1=84mm,b 2=78mm, 双向运转 ,齿轮在轴上对称布置 ,中 等冲击 ,电动机驱动;试校核此齿轮传动的强度;解:小齿选用 45 号钢 ,轮调质处理 ,查表硬度 220HBS 大齿轮 ZG45 硬度 180HBC190 M Pa 140 M Pa 查表得F lim 1 F lim 2555MPa470 M PaH lim 1 H lim 2查表得 : S HS F555 470 Hlin 1S HHlin 2S HM PaH H 12190140Flin 1S FFlin 2S FM Pa100MPaF F 12运算转矩 :4 72064T 1105.3 10 N mm由于原动机为电动机 ,中等冲击 , 对称布置 ,故得 K= 1,2由于就是闭式齿轮 , 我们先较核齿面接触疲惫强度 , 我们按标准中心距进行较核 :z 2 z 173 25am( z 1z 2 ) / 2 196mmu3KT 1 (u 1) M Pa∴355( 安全 )H2ub 2 a下面 , 我们再较核齿根弯曲疲惫强度; 查表得 :Y FS1Y FS 2Y FS1Y FS 21 z12 z2F F 2KT 1Y FS1b 2 m z 1M Pa< 100 < ( 安全) F12第 9 章 蜗杆传动 1.为什么将蜗杆分度圆直径d l 规定为蜗杆传动中的标准参数?为便于加工蜗轮刀具的标准化, 一般将蜗杆的分度圆直径规定为标准值;2.为什么蜗杆的传动比 i 只能表达为 i = z 2/z 1 ,却不能以 i = d 2/d 1 来表示? 由于蜗轮蜗杆传动的传动比与蜗杆的直径无关;3.图示的各蜗杆传动均以蜗杆为主动件;试标出图中未注明的蜗轮或蜗杆的转向及旋向,并画出蜗杆与蜗轮受力的作用点与三个分力的方向;(a) (b)(a)(b)第 10 章作业题1.图示所示轮系 ,已知 Z 1=18, Z 2=20, Z 2'=25, Z 3=25, Z 3'=2, Z 4 =40,求该轮系的传动比 , 并判定蜗轮 4 的转向;z 2 z 3 z 4 z 1 z 2 ' z 3 '20 18 25 25 40 222解:i =转向 : 逆时针2.在图示轮系中 ,已知 z 1, z 2, z 2', z 3, z 4, z 4', z 5, z 5',z 6; 求传动比 i 16;z 2 z 3 z 4 z 5 z 6 z 1 z 2 ' z 3 z 4 ' z 5 '解: i 16z 115, z 225, z 215, z 330, z 315, z 430, z 42 3. 如 图 所 示 的 轮 系 , 已 知 ( 右60, z 5 20, m 4mm , 500r / min z 5n 1 旋) 如 ,求齿条 6 线速度 v 的大小与方向;解:n 1 n 5z 2 z 3 z 4 z 5 z 1 z 2 ' z 3 ' z 4 'i200n 1 in/ min5d 5' n 5 1000mz 5' n 5 v 60.0105m / s s60 60 10004.图示行星轮系 ,已知 Z 1 = Z 2’= 41,Z 2 = Z 3 = 39,试运算传动比i H1;解:z 2 z 3 z 1 z 2' n 1 n 3n H n H1521 1681H i130 ),由于轮 3 为固定轮 (即 n 3z 2 z 3 z 1 z 2 'n 1 n H 39 41 39 41160 1681H13i 1 i 11= 1Hi H11 / i 1H机械设计基础课程形成性考核平常作业(四)第 11 章 带传动1.带传动产生弹性滑动与打滑的缘由就是什么.对传动各有什么影响 .由于带就是弹性体 ,带紧边与松边拉力不同 , 由于带的弹性变形量的变化而引起的带与带轮间的相对滑 动;打滑就是带传递的圆周力大于带能传递的最大有效圆周力 ,引起的带在带轮上全面滑动的;弹性滑动将引起 :(1)降低传动效率 ;(2)从动轮的圆周速度低于主动轮 ,造成传动比误差 ;(3)带的磨损 ;(4)发热使带温度上升;打滑造成带的磨损加剧 ,无法传递动力 ,致使传动失效; 2.试分析增速带传动工作时 ,其最大应力在哪里 . 带紧边刚绕出小带轮处3.V 带传动 n 1=1450r/min, f v =0 ,51,包角 =150 °,预紧力 F 0=360N ;试问 : 1)该传动所能传递的最大有效拉力就是多少 .2)如 d 1=100mm, 其传递的最大转矩为多少 .3)如传动的效率为 0,95,弹性滑动忽视不计 ,从动轮输出功率为多少 .fe1 1N解:(1) F2F maxe fFd 1 2180.7 1002(2) T9035d 1n 11000 (3) v 7.6m / s60 P Fv k W第 12 章 联 接1.一般平键的截面尺寸 b ×h 按_轴径 _选取 ,长度 L 按 轮毂的长度 确定;2.花键联接的主要类型有 _矩形 _花键, _渐开线 _花键与 _三角形 _花键;3.为什么多数螺纹联接工作前均要预紧?如何掌握预紧力?螺纹联接的主要防松方法有哪些?预紧的目的就是为了增加联接的刚性,紧密性与防松才能;用测力矩扳手与定力矩扳手机械防松 摩擦防松 其她防松第 13 章 轴1.按轴的受力分类 ,轴可以分为 _心轴 轴, 转轴 _与_传动轴 _;2.请判定图示四个轴中 ,哪一个轴的结构有错误 ,显现的就是什么错误 ,应如何改正;a) b) c) d)C 轴承无法拆卸 ,应将轴肩高度低于轴承内圈第 14 章 轴 承1.写出以下轴承代号表示的内容 ,说明该轴承适用的场合;7208,32314,6310/ P5,7210B,N22222.如下列图,轴的两端用两个角接触球轴承7207C 正装;常温下工作;工作中有中等冲击;转速n=1800r/min, 两轴承的径向载荷分别就是Fr I=3400N,Fr II =1050N,轴的轴向载荷Fa=870N, 方向指向轴承2,试确定哪个轴承危急,并运算出危急轴承的寿命;解: S1R13400 2312 NS221050 714 N2312 870 >714NS1F a∴左边轴承被放松, 右边轴承被压紧;A1S12312 N A2S1F a3182 NA1 R123123400A2R231281050e>e 通过查表x11y10x2y2∴P 1x1R1Y1A13400KN∴P2x2R2Y2A2C 30500KN P 2 大 , 我们用它运算 查表得 f p 6 10 f t C ) L ( =1060(h)10h 60n f p P 第 15 章 联轴器与离合器联轴器与离合器的主要功用与区分就是什么 .答: 联轴器与离合器主要都就是用来联接两轴并传递扭矩,用联轴器联接的两根轴 ,只有机器停止运转后 , 经过拆卸才能分别 ,而用离合器联接的两根轴在运转过程中能随时依据需要结合或分别;。
机械设计基础课程形成性考核作业及答案.doc
机械设计基础课程形成性考核作业(一)第 1 章静力分析基础1.取分离体画受力图时,__CEF__力的指向可以假定,__ABDG__ 力的指向不能假定。
A .光滑面约束力B.柔体约束力C.铰链约束力 D .活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__ 的方向上,使投影方程简便;矩心应选在_FG_ 点上,使力矩方程简便。
A .与已知力垂直E.已知力作用点B .与未知力垂直F.未知力作用点C.与未知力平行G.两未知力交点D .任意H.任意点3.画出图示各结构中AB 构件的受力图。
4.如图所示吊杆中 A 、 B、C 均为铰链连接,已知主动力F= 40kN,AB = BC= 2m,=30. 求两吊杆的受力的大小。
解:受力分析如下图列力平衡方程:Fx 0又因为AB=BCF A sin F C sinF A F CFy 02F A sin FF A F BF40KN 2 sin第 2 章常用机构概述1.机构具有确定运动的条件是什么答:当机构的原动件数等于自由度数时,机构具有确定的运动2.什么是运动副什么是高副什么是低副答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
( 1) n=7,P L= 10, P H=0(2)n=5,P L=7,P H=0F 3n 2P L P H F 3n 2P L P H3 7 2 10 3 5 2 71 1C处为复合铰链( 3)n= 7, P L=10,P H= 0(4)n=7,P L=9,P H= 1F 3n 2P L P H F 3n 2P L P H3 7 2 10 3 7 2 9 11 2E、E ’有一处为虚约束F 为局部自由度C处为复合铰链第 3 章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C_为机架,将得到双曲柄机构。
机械设计基础形考作业答案

机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,C、E、F力的指向可以假定,A、B、D、G力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在___B___的方向上,使投影方程简便;矩心应选在__G___点上,使力矩方程简便。
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,=30.求两吊杆的受力的大小。
列力平衡方程:Fx0又因为AB=BCF A sinF C sinF A FCFy02F A sinFFF A F B40KN2sin第2章常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
机构的自由度计算(1)n=7,P L=10,P H=0(2)n=5,P L=7,P H=0F3n2P L PF3n2P L P HH37210352711C处为复合铰链(3)n=7,P L=10,P H=0(4)n=7,P L=9,P H=1F3n2P L PF3n2P L P HH372103729112E、E’有一处为虚约束F为局部自由度C处为复合铰链第3章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C__为机架,将得到双曲柄机构。
A.最长杆B.与最短杆相邻的构件C.最短杆D.与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电大机械设计基础形成性考核作业(一)答案
第1章 静力分析基础
1. C 、E 、F A 、B 、D 、G
2. B F 、G
3.
4.解:受力分析如下图
列力平衡方程:
∑=0Fx
又因为 AB=BC
ααsin sin C A F F =⋅
C A F F =
∑=0Fy
F F A =⋅αsin 2 KN F F F B A 40sin 2==
=∴α
第2章 常用机构概述
1.答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.机构的自由度计算
(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0
H L P P n F --=23 H L P P n F --=23
=10273⨯-⨯ =7253⨯-⨯
1= 1=
C 处为复合铰链
(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1
H L P P n F --=23 H L P P n F --=23
=10273⨯-⨯ =19273-⨯-⨯
1= 2=
E 、E ’有一处为虚约束
F 为局部自由度
C 处为复合铰链
第3章 平面连杆机构
1.C
2.a )双曲柄机构 b )曲柄摇杆机构 c )双摇杆机构 d )双摇杆机构
3.解:要得到双曲柄机构,因此AD 杆必须为最短杆;
若AB 为最长杆,则AB ≥BC =150mm
若BC 为最长杆,由杆长条件得:
CD AB BC AD l l l l +≤+
mm l l l l CD BC AD AB 130=-+≥
因此AB l 的最小值为130mm
4.如下图:
第4章 凸轮机构
1.凸轮 推杆 机架
2.尖顶 滚子 平底
3.盘形 圆柱 曲面
4.解:(1)mm r L R R T 15515250=+-=+-=
(2)
(3)mm R r R L H T 3015515250=-++=-++=
(4)mm r L R L r R S T T 98.10)()(22=----+=
第5章 其他常用机构
1.棘轮机构 槽轮机构 不完全齿机构
2.左旋 右旋 三角形 矩形 梯形 锯齿形
3.答:导程S :在同一螺纹线上相邻两螺纹牙之间距离。
线数n:在同一圆柱面上制造螺纹线的数目。
螺距p:相邻两螺纹牙平行侧面间的轴向距离。
因此np
S。