【毕业设计】水下自主航行器结构设计
自主式水下航行器试验平台的设计

自主式水下航行器试验平台的设计张东昆;侯建钊;高菲【摘要】In order to supply a test⁃bed for the underwater detection,an autonomous underwater vehicle(AUV)was devel⁃oped,which can be applied to the aspects of ocean resource investigation,portsecurity,aquaculture,geomorphology observa⁃tion,etc. With sensors like AHRS and SONAR,It can move and avoid obstacle autonomously,and plan optimal path in real time to realize the underwater geomorphology observation,resource exploration by means of navigation algorithm. It also has the ability to draw maps in unknown underwater environment.%为水下探测提供试验平台,设计了一台自主式水下航行器(AUV)。
该航行器可被应用于海洋资源调查、港口安防、水产养殖、地貌观测等诸多方面。
它可利用自身搭载的声呐、AHRS等传感器,实现水下自主航行、避障;并通过导航算法,实时地规划最优路径,完成水下地貌观测、资源探测。
同时它也具备在水下未知环境,构建地图能力。
【期刊名称】《现代电子技术》【年(卷),期】2015(000)010【总页数】3页(P115-117)【关键词】水下航行器;自主式;水下试验平台;地貌观测【作者】张东昆;侯建钊;高菲【作者单位】中国海洋大学信息科学与工程学院,山东青岛 266100;中国海洋大学信息科学与工程学院,山东青岛 266100;中国海洋大学信息科学与工程学院,山东青岛 266100【正文语种】中文【中图分类】TN911-34随着对资源的消耗量和需求量的与日俱增,人们开始加快对海洋的开发进程。
“旅行者”水下航行器的设计
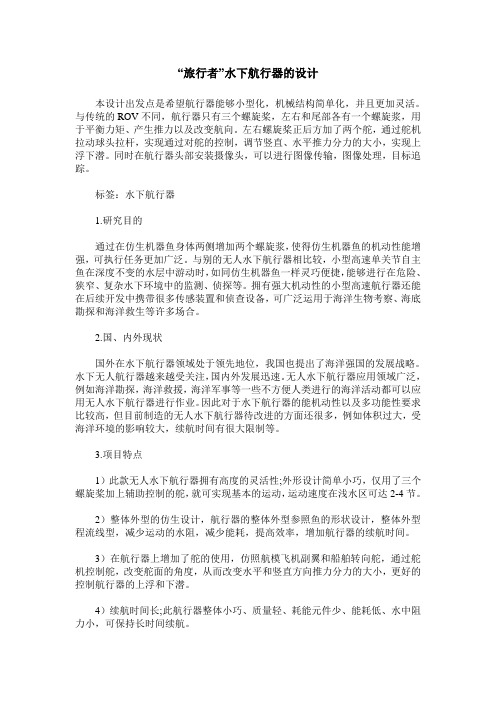
“旅行者”水下航行器的设计本设计出发点是希望航行器能够小型化,机械结构简单化,并且更加灵活。
与传统的ROV不同,航行器只有三个螺旋桨,左右和尾部各有一个螺旋浆,用于平衡力矩、产生推力以及改变航向。
左右螺旋桨正后方加了两个舵,通过舵机拉动球头拉杆,实现通过对舵的控制,调节竖直、水平推力分力的大小,实现上浮下潜。
同时在航行器头部安装摄像头,可以进行图像传输,图像处理,目标追踪。
标签:水下航行器1.研究目的通过在仿生机器鱼身体两侧增加两个螺旋浆,使得仿生机器鱼的机动性能增强,可执行任务更加广泛。
与别的无人水下航行器相比较,小型高速单关节自主鱼在深度不变的水层中游动时,如同仿生机器鱼一样灵巧便捷,能够进行在危险、狭窄、复杂水下环境中的监测、侦探等。
拥有强大机动性的小型高速航行器还能在后续开发中携带很多传感装置和侦查设备,可广泛运用于海洋生物考察、海底勘探和海洋救生等许多场合。
2.国、内外现状国外在水下航行器领域处于领先地位,我国也提出了海洋强国的发展战略。
水下无人航行器越来越受关注,国内外发展迅速。
无人水下航行器应用领域广泛,例如海洋勘探,海洋救援,海洋军事等一些不方便人类进行的海洋活动都可以应用无人水下航行器进行作业。
因此对于水下航行器的能机动性以及多功能性要求比较高,但目前制造的无人水下航行器待改进的方面还很多,例如体积过大,受海洋环境的影响较大,续航时间有很大限制等。
3.项目特点1)此款无人水下航行器拥有高度的灵活性;外形设计简单小巧,仅用了三个螺旋桨加上辅助控制的舵,就可实现基本的运动,运动速度在浅水区可达2-4节。
2)整体外型的仿生设计,航行器的整体外型参照鱼的形状设计,整体外型程流线型,减少运动的水阻,减少能耗,提高效率,增加航行器的续航时间。
3)在航行器上增加了舵的使用,仿照航模飞机副翼和船舶转向舵,通过舵机控制舵,改变舵面的角度,从而改变水平和竖直方向推力分力的大小,更好的控制航行器的上浮和下潜。
水下滑翔机的设计与控制
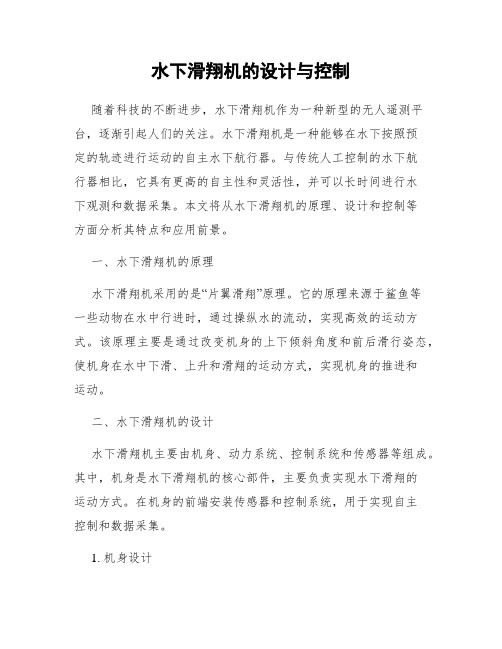
水下滑翔机的设计与控制随着科技的不断进步,水下滑翔机作为一种新型的无人遥测平台,逐渐引起人们的关注。
水下滑翔机是一种能够在水下按照预定的轨迹进行运动的自主水下航行器。
与传统人工控制的水下航行器相比,它具有更高的自主性和灵活性,并可以长时间进行水下观测和数据采集。
本文将从水下滑翔机的原理、设计和控制等方面分析其特点和应用前景。
一、水下滑翔机的原理水下滑翔机采用的是“片翼滑翔”原理。
它的原理来源于鲨鱼等一些动物在水中行进时,通过操纵水的流动,实现高效的运动方式。
该原理主要是通过改变机身的上下倾斜角度和前后滑行姿态,使机身在水中下滑、上升和滑翔的运动方式,实现机身的推进和运动。
二、水下滑翔机的设计水下滑翔机主要由机身、动力系统、控制系统和传感器等组成。
其中,机身是水下滑翔机的核心部件,主要负责实现水下滑翔的运动方式。
在机身的前端安装传感器和控制系统,用于实现自主控制和数据采集。
1. 机身设计水下滑翔机的机身通常采用双圆筒形结构,相邻两圆筒间隔装有可伸缩的翼片。
其机身外形与鲨鱼类似,能够通过上下调整、前后滑行等方式实现运动控制。
机身中央部分为电池和控制系统,同时配有浮力块以保持运动的平衡。
2. 动力系统设计水下滑翔机的动力系统主要由电池和电动机组成,具有环保、高耐用、低噪音等特点。
其电池通常采用锂电池,能够支持长时间的运行;电动机则是通过传动链条带动翼片,实现机体在水中的上下移动。
3. 控制系统设计负责水下滑翔机自主控制和姿态的检测。
通常采用导航、GPS、陀螺仪等探测器组成。
能够在水下自主寻址、避障、测量、互动等操作。
其中的导航系统主要是用来判断机身运动的方向和速度;GPS系统用来判断机体的位置和测量深度;陀螺仪则用于测量姿态角和加速度。
4. 传感器设计水下滑翔机的传感器主要包括水温、水压、水流速等探测。
其中的水温、水压能够反映海洋环境的变化;水流速则反映水体中水流的情况。
通过传感器所采集到的数据,可以对海洋环境进行深入了解,并为相关科学研究提供重要支持。
自主式水下航行体模块化设计关键技术
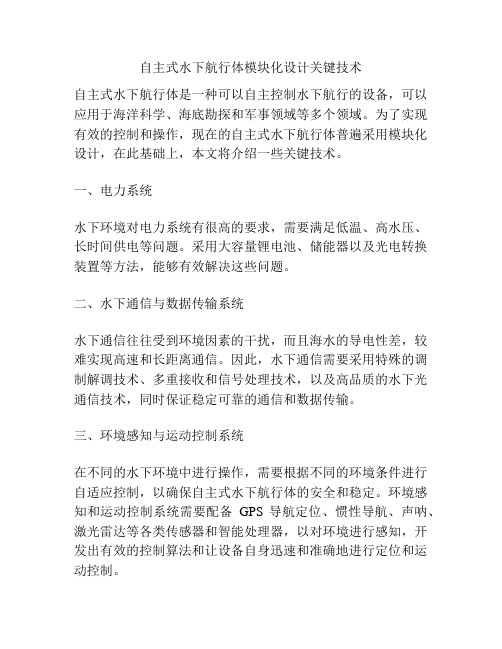
自主式水下航行体模块化设计关键技术自主式水下航行体是一种可以自主控制水下航行的设备,可以应用于海洋科学、海底勘探和军事领域等多个领域。
为了实现有效的控制和操作,现在的自主式水下航行体普遍采用模块化设计,在此基础上,本文将介绍一些关键技术。
一、电力系统水下环境对电力系统有很高的要求,需要满足低温、高水压、长时间供电等问题。
采用大容量锂电池、储能器以及光电转换装置等方法,能够有效解决这些问题。
二、水下通信与数据传输系统水下通信往往受到环境因素的干扰,而且海水的导电性差,较难实现高速和长距离通信。
因此,水下通信需要采用特殊的调制解调技术、多重接收和信号处理技术,以及高品质的水下光通信技术,同时保证稳定可靠的通信和数据传输。
三、环境感知与运动控制系统在不同的水下环境中进行操作,需要根据不同的环境条件进行自适应控制,以确保自主式水下航行体的安全和稳定。
环境感知和运动控制系统需要配备GPS导航定位、惯性导航、声呐、激光雷达等各类传感器和智能处理器,以对环境进行感知,开发出有效的控制算法和让设备自身迅速和准确地进行定位和运动控制。
四、视觉成像与图像处理系统为了实现更好的水下目标探测和定位,自主式水下航行体需要配备先进的机载相机和传感器,并采用高精度的图像处理技术,以实现对水下目标的快速识别和精密定位。
五、安全保障系统自主式水下航行体往往需要在恶劣的水下环境中进行长时间的工作,这要求安全保障系统具有高度的可靠性和智能性。
安全保障系统应该包括对于自然环境、操作人员等多方面的风险判断、预警和管理,同时还要配备自动故障诊断和安全自检装置,以提高设备的安全性和可靠性。
总之,为了实现自主式水下航行体的完美运作,在设计上需要全面考虑各种因素,并采用先进的技术,以保证运行的稳定、安全和高效性。
为了让读者更加深入了解和理解所述自主式水下航行体的设计和技术问题,我们在此列出相关数据,并进行简要的数据分析。
一、电力系统在电力系统中,我们需关注以下三个数据指标:容量、充电时间和使用时间。
水下自主航行器的横滚抑制控制系统设计

Abstract:The underwater autonomous vehicle affected with disturbance may produce the roll. In order to improve the sta⁃
bility of the underwater vehicle,a design method of underwater autonomous vehicle control system based on roll suppression is
关键词:水下自主航行器;航行器横滚抑制;控制系统;PID 控制算法
中图分类号:TN964⁃34;TP273
文章编号:1004⁃373X(2017)14⁃0085⁃03
Байду номын сангаас文献标识码:A
Design of roll suppression control system for underwater autonomous vehicle
proposed. The system design includes the control algorithm design and system hardware modular design. The robustness PID con⁃
trol algorithm is used to design the control law,and construct the time ⁃ delay closed ⁃ loop system controlled with static neural
2017 年 7 月 15 日
第 40 卷第 14 期
Jul. 2017
Vol. 40 No. 14
水下自主巡航机器人结构设计和控制系统研制

水下自主巡航机器人结构设计和控制系统研制随着科技的不断进步和发展,水下自主巡航机器人正成为越来越重要的工具。
它们能够在水下环境中完成一系列任务,比如进行水下考古、海洋监测和钻探等。
本文将探讨水下自主巡航机器人结构设计和控制系统的研制。
1.结构设计水下自主巡航机器人主要由以下几个部分组成:主体结构、驱动系统、导航与控制系统、传感器和电源系统。
其中,主体结构是整个机器人的骨架,也是机器人的载荷承载部分。
在设计主体结构时,需要考虑到机器人的推力、稳定性和机动性。
一般来说,主体结构呈椭圆形或类似水滴状,这种形状可以提高机器人的稳定性和机动性。
同时,主体结构的外壳要选用轻质高强度材料,比如碳纤维、玻璃纤维等,以确保机器人的强度和刚性。
驱动系统是机器人的动力来源,它能够让机器人向前或向后行驶。
目前,水下自主巡航机器人的驱动系统主要有两种类型:液压驱动和电力驱动。
液压驱动系统可以提供更大的推力和更高的速度,但是它需要消耗更多的能量。
而电力驱动系统则相对较为轻便和便于控制,但是它的推力和速度相对较低。
导航与控制系统是水下自主巡航机器人的灵魂所在。
它能够让机器人自主行驶,并且根据任务要求进行各种操作。
一般来说,导航与控制系统会采用惯性导航系统、GPS系统和深度测量仪等设备,以保证机器人的定位和姿态控制精度。
传感器是机器人的眼睛和耳朵,能够实时获取机器人所在环境的各种信息。
常用的传感器有声纳、磁力计、水温和盐度计等。
通过这些传感器,机器人可以快速获取水下环境的各种信息,并准确地调整运动轨迹和姿态。
电源系统则是机器人的能量来源。
在水下环境中,电源系统需要具有足够的容量和耐用性,才能确保机器人的正常运转。
常用的电源系统有锂电池、燃料电池和太阳能电池等。
2.控制系统研制水下自主巡航机器人的控制系统需要具备以下几个方面的能力:环境感知、路径规划、姿态控制、运动控制、安全保障和数据传输。
为了实现各种控制能力,需要有多个控制子系统协同工作。
水下航行器结构

水下航行器结构水下航行器是指能够在水下环境中自主航行、携带有效负荷并完成特定任务的机器人。
它们的结构和设计往往取决于其用途和功能,一般可分为以下几个主要部分:1.船体结构:水下航行器的主要框架通常由船体构成,用于提供结构支撑和保护机器人内部的电子设备和其他装置。
船体通常采用高强度材料制成,如碳纤维复合材料或铝合金,以提高机器人的耐用性和抗腐蚀能力。
2.推进系统:水下航行器通常需要一套推进系统来提供动力并实现自主航行。
推进系统的设计取决于航行器的大小和用途。
一些常用的推进系统包括螺旋桨、水动力喷射器和水动力翼。
这些系统通常由电动机、涡轮机或其他能源驱动,以提供必要的推力。
3.感知和控制系统:水下航行器通常配备各种传感器和控制装置,以实现对环境的感知和对航行器的控制。
常见的传感器包括声纳、摄像机、水质传感器等,用于获取水下环境的信息。
控制装置通常由计算机系统和相关软件组成,用于处理传感器数据并控制航行器的航行和任务执行。
4.电力系统:水下航行器通常需要一种可靠的电力系统来提供所需的能源。
这些电力系统可以包括一组充电电池、燃料电池或甚至太阳能电池板等。
电力系统的设计应考虑到航行器的电力需求,以保证足够的续航能力。
5.通信系统:水下航行器通常需要与地面控制中心或其他无线设备进行通信。
为此,航行器通常配备无线通信设备,如声纳通信、激光通信或无线电通信等。
这些通信系统可以实现数据传输、命令控制和任务协调等功能。
总的来说,水下航行器的结构设计需要综合考虑材料选择、推进系统、感知和控制系统、电力系统以及通信系统等多个因素。
这些结构的设计目标是提供稳定的航行性能、高效的能源利用、准确的定位和导航能力,以及可靠的通信和控制能力。
海洋水下滑翔机的设计与控制
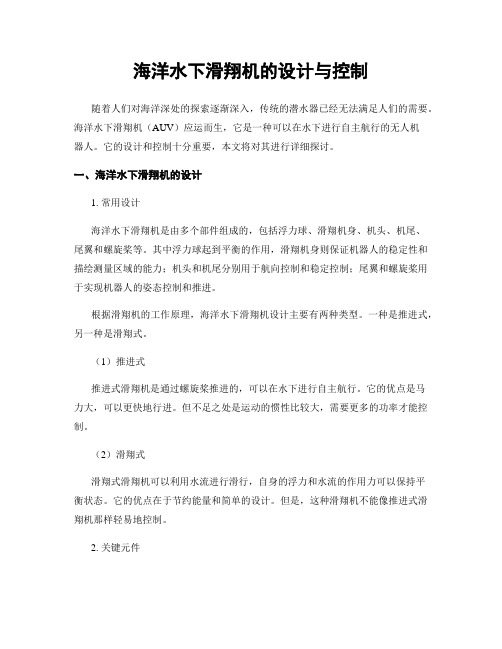
海洋水下滑翔机的设计与控制随着人们对海洋深处的探索逐渐深入,传统的潜水器已经无法满足人们的需要。
海洋水下滑翔机(AUV)应运而生,它是一种可以在水下进行自主航行的无人机器人。
它的设计和控制十分重要,本文将对其进行详细探讨。
一、海洋水下滑翔机的设计1. 常用设计海洋水下滑翔机是由多个部件组成的,包括浮力球、滑翔机身、机头、机尾、尾翼和螺旋桨等。
其中浮力球起到平衡的作用,滑翔机身则保证机器人的稳定性和描绘测量区域的能力;机头和机尾分别用于航向控制和稳定控制;尾翼和螺旋桨用于实现机器人的姿态控制和推进。
根据滑翔机的工作原理,海洋水下滑翔机设计主要有两种类型。
一种是推进式,另一种是滑翔式。
(1)推进式推进式滑翔机是通过螺旋桨推进的,可以在水下进行自主航行。
它的优点是马力大,可以更快地行进。
但不足之处是运动的惯性比较大,需要更多的功率才能控制。
(2)滑翔式滑翔式滑翔机可以利用水流进行滑行,自身的浮力和水流的作用力可以保持平衡状态。
它的优点在于节约能量和简单的设计。
但是,这种滑翔机不能像推进式滑翔机那样轻易地控制。
2. 关键元件关键元件包括电机、电子控制系统、氧气发生器、水流计和声纳。
这些部件是控制滑翔机实施海域观测时所需的。
其中氧气发生器是非常重要的,因为海水的氧气含量很低,如果没有这个设备,机器人可能会因为氧气不足而无法工作。
水流计和声纳则用于避免水流的影响,以保证机体的稳定性。
二、海洋水下滑翔机的控制1. 定位和导航系统定位和导航系统是控制滑翔机的关键。
由于滑翔机是实现自主水下航行的无人机器人,因此定位和导航系统必须具备高精度的特性。
目前,在海洋水下滑翔机设计中,主要采用四种方式实现定位和导航系统:GPS、北斗卫星导航、声纳和惯性导航系统。
海洋水下滑翔机需要实现自主航行和定点测量,因此在这几个方面具有同等重要的作用。
同时,正常的GPS天线作用于海水中的电磁波过于微弱,可能会失去定位功能,因此需要结合使用其他导航系统以保证精度。
自主水下航行器折叠天线设计

138机械设计与制造Machinery Design&Manufacture第1期2021年1月自主水下航行器折叠天线设计严天宏1,申洪彬I,何波2,刘继鑫1(1.中国计量大学机电工程学院,浙江杭州310018;2冲国海洋大学信息科学与工程学院,山东青岛266100)摘要:通过对水下机器人的主体外形以及传统水下机器人的外附体进行建模,运用CFD流体软件对其进行仿真分析,发现自主水下航行器外附体中,天线产生阻力最大。
天线是自主水下航行器必•不可少的通信模块。
针对天线带来的大阻力问题,设计出两种折叠天线机构。
运用ADAMS软件对比了两种折叠天线机构运动性能参数;运用SolidWorks的应力仿真模块分析了折叠天线各个部分的耐压强度。
结果表明折叠天线的应用能为自主水下航行器性能产生积极影响,为自主水下航行器的设计提供参考。
关键词:自主水下航行器;折叠天线:CFDjADAMS中图分类号:TH16;TP242;TH11文献标识码:A文章编号:1001-3997(2021)01-0138-04Design of Folding Antenna for Autonomous Underwater VehicleYAN Tian-hong1,SHEN Hong-bin1,HE Bo2,LIU Ji-xin1(1.School of Mechanical and Electrical Engineering,China Jiliang University,Zhejiang Hangzhou310018,China;2.Schoolof Information Science and Engineering,Ocean University of China,Shandong Qingdao266100,China)Abstract:The main body shape and external body of the traditional autonomous underwater vehicle are modeled and analyzedby CFD software.It is found that the antenna has the largest resistance in the external body of the autonomous underwater vehicle.The antenna is an indispensable communication module for autonomous underwater vehicles.Aiming at the problemof large resistance caused by antenna,two folding antenna mechanism is designed in this parison of the peiformance parameters of two folded antenna mechanisms using ADAMS software.The compressive strength of each part ofthe folded antenna is analyzed by using the stress simulation module of SolidWorks.The results show that the application ofthe folded antenna can positively effect the performance of the autonomous underwater vehicle,and provide reference for the design of the autonomous underwater vehicle.Key Words:Autonomous Underwater Vehicle;Folded Antenna;CFD;ADAMS1引言自主水下航行器(Autonomous Underwater Vehicle,AUV)作为一种移动的海洋监测平台,本身具备使用成本低,监测范围广,下潜深度大等优点,已成为海洋资源的勘测、利用的重要工具冋。
水下驻留航行器锚泊系统总体设计

本科毕业设计论文题目水下驻留航行器锚泊系统总体设计专业名称机械设计制造及其自动化学生姓名指导教师毕业时间毕业设计任务书论文一、题目水下驻留航行器锚泊系统总体设计二、研究主要内容通过毕业设计,进一步加深对基础知识和专业知识的理解,达到提高综合运用各种知识解决实际问题能力的目的。
水下驻留航行器是一种能够通过锚泊系统在海底保持稳定系留状态的一种新型航行器。
其锚泊系统总体方案设计的主要研究内容包括:(1)锚泊系统的原理方案及其组成;(2)锚泊系统结构布局及其主要设计参数;(3)锚链释放结构设计;(4)锚碇设计方案。
三、主要技术指标(1)航行器总长:7000mm ,最大直径:534.4 mm(2)锚链有效长度:8 m(3)海底洋流速度: 2 kn(4)舱段长度:350 mm四、进度和要求1 - 2周:翻译外文资料,熟悉所要研究的主要内容;3 - 4周:学习UG三维设计软件;5 - 6周:研究锚泊系统原理;7 - 8周:研究锚泊系统结构方案及其组成;9 - 10周:完成锚碇、锚链的结构设计;11 -12周:完成锚链释放结构设计;13 -14周:完成锚泊系统结构布局设计;15 -16周:整理材料并撰写毕业设计论文;17 周:答辩。
五、主要参考书及参考资料[1] 陈作模. 《机械设计》. 北京:高等教育出版社[2] 张宇文.《鱼类外形设计》(上、下). 西安:西北工业大学出版社[3] 宋博等. 有档锚链外形优化[J]. 造船技术. 2010,2:36-40[4] 游源. CT-Spar 平台疲劳寿命分析及其锚链系泊系统设计[D].上海交通大学硕士学位论文.2008UG等相关软件学习材料学生___________ 指导教师___________ 系主任___________摘要近年来,随着自主水下航行器(AUV)在海洋领域应用愈来愈广泛,自主水下航行器(AUV)的研制受到各国的普遍重视。
情报、监视和侦察是AUV的主要任务,但是目前没有一个国家研制出一种可以深入敌方长时间潜伏来执行监视和侦察任务的远航程AUV。
水下滑翔机设计毕业设计论文

毕业设计论文水下滑翔机设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
水下自主巡航机器人结构设计和控制系统研制

水下自主巡航机器人结构设计和控制系统研制首先,水下自主巡航机器人的结构设计应包括机体结构、动力系统、传感系统和控制系统等方面。
机体结构是机器人的基本框架,应具备良好的稳定性和适应性。
机体结构通常采用类似鱼类、鳗鱼等水生动物的外形设计,以减小阻力、提高机器人的机动性能。
此外,机体结构还应具备良好的水密性和抗压性能,以保证机器人在深海等高压环境中的安全运行。
动力系统是机器人进行自主巡航的关键。
通常使用的动力系统包括推进器、电池和能量管理系统。
推进器应具备高效、静音的特点,以提高机器人的推进性能和操控性能。
电池和能量管理系统应具备长时间持续供电的能力,以保证机器人在巡航任务中的能量需求。
传感系统是机器人获取环境信息的重要手段。
一般包括摄像头、声纳、压力传感器等。
摄像头可以用于拍摄和记录水下环境的图像和视频,以供后续分析和决策。
声纳可以用于进行水下声纳成像和距离测量,以帮助机器人进行地形识别和障碍物探测。
压力传感器可以用于测量水下环境的深度和压力情况,以提供机器人位置和姿态信息。
控制系统是机器人实现自主巡航的核心。
控制系统主要包括导航系统和决策系统。
导航系统使用传感器获取机器人当前位置和姿态信息,并根据任务需求制定巡航航线。
决策系统根据环境信息和任务要求,通过算法和逻辑进行决策,控制机器人进行动作。
控制系统还应具备自适应、故障诊断和容错性能,以应对复杂的水下环境和任务需求。
总结起来,水下自主巡航机器人的结构设计和控制系统研制涉及到机体结构、动力系统、传感系统和控制系统等方面。
只有这些方面的设计和研制工作充分考虑到机器人在水下环境中的特点和需求,才能够实现水下自主巡航机器人的安全、稳定和高效运行。
【毕业设计】水下自主航行器结构设计

分类号密级UDC本科毕业设计水下自主航行器结构设计完整设计图纸,源代码,程序代码,毕业论文,外文翻译,任务书,开题报告,答辩PPT,需要请联系QQ68661508学生姓名学号指导教师院、系、中心工程学院机电系专业年级2011级机械制造及其自动化专业论文答辩日期 2015 年 6 月 4 日中国海洋大学水下自主航行器结构设计完成日期:指导教师签字:答辩小组成员签字:摘要海洋是人类尚未完全开发的巨大宝库,有效的利用海洋及湖泊的资源对于人类的生存和发展至关重要。
水下机器人在水下资源的开发与探查、民用方面搜救与科研、军事侦察与对抗等方面都是非常重要的组成部分。
水下机器人由于其独特的水下环境适应性、相较于人工的方便性等优势,目前已经成为当今社会的热门研究领域。
本文根据设计任务书,设定水下自主航行器的技术指标,针对水下自主航行器分层设计,主要进行水下自主航行器的结构设计,水下自主航行器的耐压壳体设计,其中包括耐压壳体的材料选用、计算校核、密封设计以及观察窗的设计;水下自主航行器推进装置与舵的设计,其中包括推进器排列设计、推进器的选用、系统与舵的设计、密封设计;水下自主航行器的防腐蚀设计。
对于水下自主航行器具体的设计从分层设计入手,由上至下进行设计,分别采用具体设计、概念设计、预留空间等设计方法。
初步设计的具体方法为:判别设计要求之后,结合前人所做的数据分析,从多种设计方案中选用最优的设计方案进行进一步的研究,随后选用经验公式进行初步的校核,完成初步的设计。
为了更好的研究AUV的水下性能,本文选用solidworks的SimulationXpress 功能对AUV进行静态分析,主要对于AUV的耐压壳体、舵进行校核,就压力、变形以及安全系数三个大体方面进行分析。
通过对于耐压壳体、舵整体施加压力,划分网格,进行静态分析。
对设计完成的AUV进行基于Ansys Workbench三维动态分析,模拟AUV 附近流场的运动,划分网格、设定边界条件,分析得到结果,将分析得到的结果与经验公式的计算值相比较,综合考虑速度与压力等因素,验证设计的安全可行性。
基于聚四氟乙烯的水下航行器壳体优化设计

基于聚四氟乙烯的水下航行器壳体优化设计聚四氟乙烯(PTFE),又称为特氟龙,在工业界广泛应用于润滑剂、密封材料和电子器件中。
由于其卓越的耐腐蚀性、耐热性和低摩擦系数,PTFE也被用于水下航行器的壳体设计。
水下航行器是近年来发展起来的一种新型船舶,由于其能够在水下运行,可以承担多种任务,如水下勘探、油田水下作业和海底资源开发等。
而水下航行器的壳体材料是决定其性能和寿命的关键因素之一。
PTFE作为水下航行器的壳体材料,有着不可替代的优势。
其首要的优势是耐腐蚀,PTFE可以抵抗常见的腐蚀介质,如深海盐水、油脂等,从而提高水下航行器在恶劣环境下的使用寿命。
其次是低摩擦系数,PTFE作为一种高聚物材料,摩擦系数低,因此可以减少水下航行器在水下运行时的阻力,提高航行器速度和效率。
最后是耐热性,PTFE可以承受高温,可以用于水下航行器需要承受高温的部位,如引擎舱等。
除了上述优点外,PTFE在使用中还有一些需要注意的问题。
首先是PTFE无法粘接,表面必须经过特殊处理才可以与其他材料粘接。
其次是PTFE的成本较高,容易受到生产成本的影响。
对于PTFE壳体的优化设计,需要考虑到以下因素:航行器的航行速度、燃料效率、操控稳定性和最大深度等。
可以从以下方面入手:(1) 纤维增强:为保证PTFE壳体的牢固性和强度,可以将其加入纤维增强材料,如碳纤维等,以提高其强度和刚度。
这可以增加航行器的稳定性,同时也可以减轻航行器的重量。
(2) 面板设计:在壳体表面设计波浪纹理或其他表面形状,这种设计可以降低水下摩擦阻力,提高航行器的速度和燃油效率。
(3) 最大深度:为了满足水下航行器的使用要求,壳体需要能够承受一定的水压,因此需要对其厚度进行评估和优化。
同时还要注意到高压对PTFE的影响,它可能会引起PTFE自身性能的改变。
(4) 防腐蚀涂层:虽然PTFE本身具有耐腐蚀性,但是在长时间的使用过程中,也可能会因为龟裂或其他原因导致腐蚀。
水下航行器的制作方法
水下航行器的制作方法
水下航行器的制作方法涉及到多个复杂的技术和步骤,包括但不限于以下方面:
1. 确定设计水下航行器的整体机械结构,这部分是整个水下航行器设计过程中最大的问题,考虑问题极多,关系到整体的运功控制方式、传感器的安装位置、各个部件是否有符合的材料、是否容易加工等等问题。
2. 具体的细化包括整个水下航行器设计的建模,所以需要提前把每个元件考虑好,每个元件的尺寸参数通信控制方式是否符合设计使用的要求,把每个部分包括外部的机械结构进行建模,整体结构的仿真优化,反复修改讨论,使阻力最小化保证水下航行时的经济性。
3. 电气控制,包括是用什么微控制器,和搭载的观测等传感器的整体电气电路。
当控制方式已经定的时候,在水中的稳定性及经济性很大程度上都取决于电气控制的算法设计了。
4. 智能控制,比如水下复杂环境的自适应观测、智能探测又或多个水下航行器的联合观测等等。
这部分是目前AUV较为关键的技术。
请注意,这只是制作水下航行器的大致步骤和思路,每个步骤都需要专业知识和大量研究和实践经验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ForAUVspecificdesignlayereddesignfromthestart,top-downdesign,respectivelyspecificdesign,conceptdesign,spaceforotherdesignmethods.Specificmethodsforthepreliminarydesign:Afterdeterminingthedesignrequirements,combinedwithpreviousdataanalysisdone,thechoiceoftheoptimaldesignforfurtherresearchfromavarietyofdesigns,andthenmakeapreliminaryselectionofempiricalformulascheck,completethepreliminarydesign.
海洋具有丰富的资源,海洋生物可以食用、药用、科研、娱乐观赏与提取生物能等;海洋潮汐、温差等物理资源可以用于发电;海洋中的化学资源,例如海水中的淡水、痕量元素(金、铀、氘、溴、碘、镁、钾等)、化合物(食盐、芒硝、石膏、重水、卤水等)等;海洋中的矿物资源(锰核、石油、天然气、矿砂、底砂等);以及海洋的空间资源等[1]。
海洋的竞争是新一轮的国际竞争,开发海洋需要高技术手段,对于海洋的开发与保护是维护可持续发展与国家安全的必然要求。由于人的潜水深度有限,水下机器人成为代替人类进行水下的作业的重要工具,目前开发海洋的工作离不开水下机器人的发展。
从民用方面出发,水下机器人技术的发展为安全搜救、管道检查、科研教学、水下娱乐、能源产业、考古、渔业等方面提供了科技的支持,使得安全检测工作、水下拆装工作、走私物品检测、水下目标观察、水下证据搜寻、海底打捞、海洋考察、水下考古、深水网箱渔业养殖等工作能够顺利展开。
分类号密级
UDC
本科毕业设计
水下自主航行器结构设计
完整设计图纸,源代码,程序代码,毕业论文,外文翻译,任务书,开题报告,答辩PPT,需要请联系QQ68661508
学生姓名学号
指导教师
院、系、中心工程学院机电系
专业年级2011级机械制造及其自动化专业
论文答辩日期2015年6月4日
中国海洋大学
水下自主航行器结构设计
对设计完成的AUV进行基于AnsysWorkbench三维动态分析,模拟AUV附近流场的运动,划分网格、设定边界条件,分析得到结果,将分析得到的结果与经验公式的计算值相比较,综合考虑速度与压力等因素,验证设计的安全可行性。设计合理则采用,反之修改设计,最终完成AUV的整体结构设计工作。
关键词:自主水下航行器;结构设计;有限元分析;仿真模拟
Abstract
Theoceanisahugeuntappedtreasuretroveofhumanity,includingmanyfreshwaterlakesdeepwater,efficientuseofresourcesoftheoceanandlakesforhumansurvivalanddevelopmentisessential.Underwaterrobotsindevelopmentandexploration,thecivilianaspectsofsearchandrescueandscientificresearch,themilitaryreconnaissanceandunderwaterresourcesandotherconfrontationisveryimportantpart,becauseofitsuniqueunderwaterrobotsunderwaterenvironmentaladaptability,comparedtoartificialconvenienceandotheradvantages,hasbecomeahotresearchfieldintoday'ssociety.
另外按照用途、运动方式、控制方式等也可将水下机器人划分为不同种类,在此不一一叙述。
1
水下机器人在军事以及国民经济中发挥重要的作用,国内外对于水下自主航行器的研究与发展给予了高度的重视。水下自主航行器(AUV)自二十世纪开始发展于七十年代步入发展探索阶段,并于八十年代进入原型设计和设计阶段,概念验证原型POC得到开发、检测和应用,这时候的AUV处于初时原始阶段,体型臃肿、效率迟缓、造价昂贵。这种情况持续到九十年代,其发展由原型进入样机阶段,AUV的发展与微电子科技、计算机技术、自主智能科技、小型化航线控制设备、控制科技等息息相关,九十年代众多技术为AUV的发展奠定了科技支持促进其走向成熟。世界范围的自主航行器在国家支持下持续进步。
AUVcompletedthedesignbasedAnsysWorkbenchthree-dimensionaldynamicanalysis,simulationofflowfieldaroundAUVmotion,mesh,settheboundaryconditions,analyzetheresultsobtained,willanalyzetheresultsoftheempiricalformulacalculatedvaluesobtainedarecompared,consideringspeedandpressureandotherfactors,toverifythefeasibilityofthedesignsafety.Rationaldesignisused,otherwisemodifythedesign,thefinalcompletionoftheoverallstructureofAUVdesign.
InordertobetterstudyAUVunderwaterperformance,paperselectstheSimulationXpressfunctionsolidworksAUVstaticanalysis,mainlyforAUV'spressurehull,rudderbechecked,conductedonpressure,deformationandsafetyfactorofthreeingeneraltermsanalysis.Throughthepressurehull,theoverallpressureontherudder,mesh,staticanalysis.
日本作为岛国一直重视海洋的开发,是深海AUV开发的强国,1995年“海沟”作为当年的世界纪录保持者,下潜深度达到10911m,其他AUV拥有如在海洋调查方面的R1Robot、Twin-Burgerl&2、PTEROA150&250(图1-4)等型号AUV,总体偏向民用深海开发,拥有三菱重工业公司等领军公司机构;UK较著名的有BAE系统公司的护身符(图1-5)军用多功能AUV;韩国拥有科研用AUVOKPO-6000、VORAM.SAUV、KRISO等;俄罗斯也自二十世纪60年代开始研发,拥有如军用MT-88号、MIR1、MIR2(图1-6)等多个型号的AUV;挪威拥有自身的军用AUV发展计划,并且拥有HUGIN(图1-7)系列等AUV;加拿大的大型“Thesues”AUV在执行北冰洋海底光缆铺设时大放异彩,同时拥有RAY、Sunfish等AUV;AUS拥有“海龟”用以水下研究以及“Wayamba”等AUV[8]。
美国的AUV技术发展起始于Rebikoff的SEASPOOK和美国华盛顿大学SPURV,同时这也是世界AUV的起始。美国存在年度的大学AUV竞赛,也有年度海上“Demonstration”AUV盛会,全国十余所AUV研究前沿机构参会。国内拥有WHOI、MBARI、MIT、MPS、APL、FAU等多所知名AUV研究机构。产品包括在伊拉克战争中大放异彩的REMUS(图1-1)系列、科考用的ABE(图1-2)型号、高性能小型AUV-BPAUV(图1-3)等。并且在国家层面具有“海军无人潜航器计划”等战略计划,北约也有M02015无人水下航行器发展计划。
1
1
水下机器人可以粗略的分为两类,一类为载人的有人潜器,例如我国的“蛟龙号”,另一类为无人潜器。无人潜器可以分为有缆潜器与无缆潜器,有缆潜器可由岸基或者母船供能运行,但是无法离开岸基或者母船太远,同时,缆线也是制约有缆潜器的关键。有缆潜器可分为遥控型和拽航型,遥控型又可分为海中浮游型与海底行走型,拽航型也可分为海中拽航型与海底拽航型;无缆潜器可分为监控型与完全自主型,完全自住型分组成员签字:
摘要
海洋是人类尚未完全开发的巨大宝库,有效的利用海洋及湖泊的资源对于人类的生存和发展至关重要。水下机器人在水下资源的开发与探查、民用方面搜救与科研、军事侦察与对抗等方面都是非常重要的组成部分。水下机器人由于其独特的水下环境适应性、相较于人工的方便性等优势,目前已经成为当今社会的热门研究领域。
对于水下自主航行器具体的设计从分层设计入手,由上至下进行设计,分别采用具体设计、概念设计、预留空间等设计方法。初步设计的具体方法为:判别设计要求之后,结合前人所做的数据分析,从多种设计方案中选用最优的设计方案进行进一步的研究,随后选用经验公式进行初步的校核,完成初步的设计。
为了更好的研究AUV的水下性能,本文选用solidworks的SimulationXpress功能对AUV进行静态分析,主要对于AUV的耐压壳体、舵进行校核,就压力、变形以及安全系数三个大体方面进行分析。通过对于耐压壳体、舵整体施加压力,划分网格,进行静态分析。
Keywords:AutonomousUnderwaterVehicle;structuraldesign;FiniteElement Analysis;simulation