4位数码管计时器
Arduino驱动MAX7219四位数码管显示时间
Arduino驱动MAX7219四位数码管显示时间Arduino驱动MAX7219四位数码管显示时间默认使用Pin 2为MOSI(数据发送)引脚,Pin 3为CS(片选)引脚,Pin 4为SCLK(时钟)引脚,如有需要请修改代码前三行的define。
#define MO 2#define CS 3#define CLK 4static int time_h = 21, time_m =25, time_s = 30; //此刻时间:时,分,秒int alarm_clock_h = 8, alarm_clock_m = 00; //闹钟时间unsigned long time = 0;unsigned char buffer_led[5] = { 0x00,};//缓存void SPI_init(void) //初始化SPI引脚{pinMode(CLK, OUTPUT);pinMode(MO, OUTPUT);pinMode(CS, OUTPUT);digitalWrite(CS, HIGH);digitalWrite(CLK, LOW);digitalWrite(MO, HIGH);}void SPI_send(unsigned char reg, unsigned char data) //spi 单向16位数据发送{int x;/*Serial.print("reg = ");Serial.print(reg, HEX);Serial.print(" data = ");Serial.println(data, HEX);*/digitalWrite(CS, LOW);for (x = 0; x < 8; x++){digitalWrite(MO, 0x80 & (reg << x)); //高位在前digitalWrite(CLK, HIGH);digitalWrite(CLK, LOW);}for (x = 0; x < 8; x++){digitalWrite(MO, 0x80 & (data << x)); //高位在前digitalWrite(CLK, HIGH);digitalWrite(CLK, LOW);}digitalWrite(CS, HIGH);}void lcd_init(void)//初始化Max7219配置{SPI_send(0x0b, 0x07); //scan-limitSPI_send(0x09, 0xff); //decode mode allSPI_send(0x0c, 0x01); //shutdown offSPI_send(0x0f, 0x00); //off display testSPI_send(0x0a, 0x04); //intensitydelay(100);}void clear(void)//清除显示{for (int i = 1; i <= 8; i++){SPI_send(i, 0x0F);}}void led_display(void)//显示时间{char cache = 0x00;if ((time_h / 10) == 0)buffer_led[0] = 0x00;else buffer_led[0] = time_h / 10;buffer_led[1] = time_h % 10 | 0x01;buffer_led[2] = time_m / 10;buffer_led[3] = time_m % 10;SPI_send(8, buffer_led[0]);SPI_send(7, buffer_led[1]);SPI_send(6, 0x0a);SPI_send(5, buffer_led[2]);SPI_send(4, buffer_led[3]);SPI_send(3, 0x0a);SPI_send(2, time_s / 10);SPI_send(1, time_s % 10);}void get_time()//获取时间并更新显示{static char ss = 1;static unsigned long time_cc = 0;if ((millis() - time_cc) > 1000 | millis() < 150)//秒{if (millis() <= 200) //若系统计时器溢出时时间,time_cc重计{time_cc = millis();time_s ++;delay(150);}else if (millis() > 200)//秒{time_s += (millis() - time_cc) / 1000;// time_cc = millis()-990; //时间快进time_cc = millis();buffer_led[4] = (0x01 & ss) << 5;ss = ~ss;}if (time_s > 59) //分{if (time_s - 60 > 1)//如果有延时间隔导致秒钟大于60秒,进行分钟缺失补偿 {time_m += time_s / 60;if (time_s % 60 == 0)time_m--;time_s = time_s - (time_s / 60) * 60;}else time_s = 0;time_m++;buffer_led[4] = 0x80;if (time_m > 59)//时{time_h++;time_m = (time_m - 60);buffer_led[4] = 0xf0;}if (time_h > 23){time_h = 0;time_s += 5; //时间误差补偿}}// Serial.print("millis="); // Serial.print(time_cc);// Serial.print(" time="); // Serial.print(time_h);// Serial.print(":");// Serial.print(time_m);// Serial.print(":");// Serial.println(time_s); led_display();//刷新数码管显示}}void setup(){Serial.begin(9600);SPI_init();lcd_init();clear();}void loop(){get_time();}。
共阳四位八段数码管
共阳四位八段数码管
标题:共阳四位八段数码管
共阳四位八段数码管是一种常见的显示器件,广泛应用于计时器、计数器等电子设备中。
它具有清晰的显示效果和简单的使用方式,为用户提供了便利。
数码管的工作原理是通过控制不同的管脚电平来点亮对应的数字或符号。
共阳四位八段数码管共有12个引脚,其中8个用于控制8段显示,另外4个引脚用于控制四位显示。
使用共阳四位八段数码管的步骤如下:首先,通过电路连接将数码管与主控芯片相连;然后,通过主控芯片发送信号控制数码管的显示内容;最后,数码管根据信号点亮相应的数字或符号。
在使用共阳四位八段数码管时,需要注意以下几点:首先,要保证电路连接正确,引脚对应无误;其次,要根据需要设置合适的亮
度,以便在不同环境下清晰可见;此外,要注意避免过高的电流和过高的温度,以防止数码管损坏。
总结起来,共阳四位八段数码管是一种常用的显示器件,具有清晰的显示效果和简单的使用方式。
在使用时要注意正确的连接和设置适当的亮度,以确保正常运行。
通过合理使用和维护,共阳四位八段数码管能够为用户提供稳定可靠的显示功能。
单片机计时器设计实训报告
一、实训目的通过本次实训,使学生了解单片机计时器的基本原理和设计方法,掌握单片机计时器的硬件设计和软件编程,提高学生动手实践能力和创新能力。
二、实训内容本次实训设计一款基于51单片机的计时器,具备计时、暂停、复位功能,计时范围0-59秒,精确到0.1秒。
三、实训原理1. 计时原理:利用51单片机的定时器/计数器功能,通过定时器中断实现计时功能。
2. 暂停功能:在计时过程中,按下暂停按钮,关闭定时器中断,计时停止。
3. 复位功能:按下复位按钮,将计时器清零,数码管显示00.0。
四、实训步骤1. 硬件设计(1)选择51单片机作为核心控制单元。
(2)选择4位共阴数码管作为显示模块,用于显示计时时间。
(3)选择按键作为控制模块,实现计时、暂停、复位功能。
(4)设计电路原理图,包括单片机、数码管、按键等模块的连接。
2. 软件设计(1)编写程序,初始化定时器/计数器,设置中断时间。
(2)编写中断服务程序,实现计时功能。
(3)编写按键扫描程序,实现计时、暂停、复位功能。
(4)编写数码管显示程序,将计时时间显示在数码管上。
3. 系统调试(1)连接电路,将程序烧录到单片机中。
(2)测试计时功能,确保计时准确。
(3)测试暂停和复位功能,确保功能正常。
(4)测试按键功能,确保按键操作正确。
五、实训结果与分析1. 硬件设计结果根据设计要求,成功设计了一款基于51单片机的计时器,包括单片机、数码管、按键等模块的连接,电路原理图如下:```+3.3V||---[单片机]||---[数码管]||---[按键]|GND```2. 软件设计结果编写了完整的程序,实现了计时、暂停、复位功能,数码管显示计时时间,计时范围0-59秒,精确到0.1秒。
3. 系统调试结果经过调试,计时器功能正常,计时准确,按键操作正确,符合设计要求。
六、实训心得1. 通过本次实训,掌握了单片机计时器的基本原理和设计方法,提高了动手实践能力和创新能力。
2. 学会了如何使用51单片机定时器/计数器功能实现计时功能,了解了中断编程的基本方法。
多功能秒表计时器

我的讲解由此开始
秒表计时器
目录
功能简介 制作方法 实现方法 小组分工
秒表计时器
秒表计时器
能够记录多个时间点的秒数。操作简单,易于使用。方便地创建和管理多个 计时器,同时提供闹钟和秒表功能,方便您更好的管理时间!适用多种用途的 提醒,例如停车收费、烹饪、运动健身、小睡、甚至按时吃药等等。
按键消抖功能简述
延时10ms再次判断该
位的状态,若仍是0 则说明该键被按下, 弹起后执行该按键功 能;若为1,则说明是 抖动则继续向下判断。
实现方法
复位功能简述
软件对显示的各内 存单元清零,并回 到开始前的初始状 态.
秒表计时器
暂停功能简述
软件对定时器0和 定时器1的控制位 清零,使定时器停 止工作 。
P1.1键按下时, 数字开始、
暂停
P1.5 键按下 时,执行下
翻功能
实现方法
按键功能简述
P1.2键按下时, 进行清零复
位
P1.3键按下 时,执行记
录功能
P1.6键按下时, 数字开始执
行ห้องสมุดไป่ตู้一
P1.7键按下时, 数字开始执
行加十
秒表计时器
P1.4键按下时, 执行上翻功
能
P1.1键按下时, 数字开始减
一
小组分工
是你:上翻、下翻子程序 存你:停止、记录子程序 民工:复位、加一子程序 从女门口:加十、减一子程序
秒表计时器
以上是我们对关于秒表 计时器的理解与分析
我的讲解至此结束
谢谢
秒表计时器
功能简介
能同时记录八 个相对独立的 时间并分别显
示。
四位LED显
4位数码管计时器程序
/******************************************************************************************* **/#include<STC12C2052AD.H>//STC头文件/******************************************************************************************* ***///“程序开发调试设置项”#define DY_LI 9 //设置LED显示的亮度(值域:~9)#define DY_DELAY 12 //设置每一个点显示的时间长度(~20)/******************************************************************************************* ***/sbit DY_LED1_H1 =P3 ^ 0; //设置LED点阵屏连接的I/O口sbit DY_LED1_H2 =P3 ^ 1; //设置LED点阵屏连接的I/O口sbit DY_LED1_H3 =P3 ^ 2; //设置LED点阵屏连接的I/O口sbit DY_LED1_H4 =P3 ^ 3; //设置LED点阵屏连接的I/O口sbit DY_LED1_L1 =P1 ^ 0; //设置LED点阵屏连接的I/O口sbit DY_LED1_L2 =P1 ^ 1; //设置LED点阵屏连接的I/O口sbit DY_LED1_L3 =P1 ^ 2; //设置LED点阵屏连接的I/O口sbit DY_LED1_L4 =P1 ^ 3; //设置LED点阵屏连接的I/O口sbit DY_LED1_L5 =P1 ^ 4; //设置LED点阵屏连接的I/O口sbit DY_LED1_L6 =P1 ^ 5; //设置LED点阵屏连接的I/O口sbit DY_LED1_L7 =P1 ^ 6; //设置LED点阵屏连接的I/O口sbit DY_LED1_L8 =P1 ^ 7; //设置LED点阵屏连接的I/O口//sbit DY_BEEP =P2 ^ 2; //扬声器//sbit DY_KEY1 =P0 ^ 2; //按键(M键)(连接在P1.3和P0.2,读P0.2为低时表示有按键动作)//sbit DY_KEY2 =P3 ^ 0; //按键(+键)(连接在P4.6和P3.0,读P3.0为低时表示有按键动作)//sbit DY_KEY3 =P3 ^ 6; //按键(-键)(连接在P2.4和P3.6,读P3.6为低时表示有按键动作)#define DY_P1M0SET 0x00 //设置I/O口工作方式//00000000(左到右,高到低位)#define DY_P1M1SET 0x00 //设置I/O口工作方式//00101000#define DY_P3M0SET 0x00 //设置I/O口工作方式//00000000#define DY_P3M1SET 0xff //设置I/O口工作方式//10010100data unsigned char TIME_DD,TIME_MO,TIME_YY,TIME_WW,TIME_HH,TIME_MM,TIME_SS,ty;//设置日、月、年、周、时、分、秒和温度存放区data unsigned char cou = 0; // 软计数器,对ms时基信号累加到sdata unsigned char bn;//扫描映射全局变量data unsigned char KEY_BIT = 0;//按键值data unsigned char DY_PWM;//显示亮度data unsigned char DY_PWM2;//显示暂存unsigned char code disdata[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f //无小数点数码管段码表(0~9)};/******************************************************************************************* **/void delay (unsigned int a){ // 用于点扫描的延时unsigned int i;while( --a != 0){for(i = 0; i < DY_DELAY; i++);}}/******************************************************************************************* **/void delay1ms (unsigned int a){ // 1ms延时程序(MHz 10倍于单片机速度时)unsigned int i;while( --a != 0){for(i = 0; i < 600; i++);}}/******************************************************************************************* **/void dis_off (void){P1 = ~DY_P1M1SET; //关所有显示P3 = ~DY_P3M1SET;delay(10-DY_PWM);}/******************************************************************************************* **/void displayHH1 (unsigned char d){ //第列横向显示程序unsigned char i;i = d & 0x01;if(i == 0x01){DY_LED1_H1 = 1;DY_LED1_L1 = 0;}delay(DY_PWM);dis_off();i = d & 0x02;if(i == 0x02){DY_LED1_H1 = 1;DY_LED1_L2 = 0;}delay(DY_PWM);dis_off();i = d & 0x04;if(i == 0x04){DY_LED1_H1 = 1;DY_LED1_L3 = 0;}delay(DY_PWM);dis_off();i = d & 0x08;if(i == 0x08){DY_LED1_H1 = 1;DY_LED1_L4 = 0;}delay(DY_PWM);dis_off();i = d & 0x10;if(i == 0x10){DY_LED1_H1 = 1;DY_LED1_L5 = 0;}delay(DY_PWM);dis_off();i = d & 0x20;if(i == 0x20){DY_LED1_H1 = 1;DY_LED1_L6 = 0;}delay(DY_PWM);dis_off();i = d & 0x40;if(i == 0x40){DY_LED1_H1 = 1;DY_LED1_L7 = 0;}delay(DY_PWM);dis_off();i = d & 0x80;if(i == 0x80){DY_LED1_H1 = 1;DY_LED1_L8 = 0;}delay(DY_PWM);dis_off();}/******************************************************************************************* **/void displayHH2 (unsigned char d){ //第列横向显示程序unsigned char i;i = d & 0x01;if(i == 0x01){DY_LED1_H2 = 1;DY_LED1_L1 = 0;}delay(DY_PWM);dis_off();i = d & 0x02;if(i == 0x02){DY_LED1_H2 = 1;DY_LED1_L2 = 0;}delay(DY_PWM);dis_off();i = d & 0x04;if(i == 0x04){DY_LED1_H2 = 1;DY_LED1_L3 = 0;}delay(DY_PWM);dis_off();i = d & 0x08;if(i == 0x08){DY_LED1_H2 = 1;DY_LED1_L4 = 0;}delay(DY_PWM);dis_off();i = d & 0x10;if(i == 0x10){DY_LED1_H2 = 1;DY_LED1_L5 = 0;}delay(DY_PWM);dis_off();i = d & 0x20;if(i == 0x20){DY_LED1_H2 = 1;DY_LED1_L6 = 0;}delay(DY_PWM);dis_off();i = d & 0x40;if(i == 0x40){DY_LED1_H2 = 1;DY_LED1_L7 = 0;}delay(DY_PWM);dis_off();i = d & 0x80;if(i == 0x80){DY_LED1_H2 = 1;DY_LED1_L8 = 0;}delay(DY_PWM);dis_off();}/******************************************************************************************* **/void displayHH3 (unsigned char d){ //第列横向显示程序unsigned char i;i = d & 0x01;if(i == 0x01){DY_LED1_H3 = 1;DY_LED1_L1 = 0;}delay(DY_PWM);dis_off();i = d & 0x02;if(i == 0x02){DY_LED1_H3 = 1;DY_LED1_L2 = 0;}delay(DY_PWM);dis_off();i = d & 0x04;if(i == 0x04){DY_LED1_H3 = 1;DY_LED1_L3 = 0;}delay(DY_PWM);dis_off();i = d & 0x08;if(i == 0x08){DY_LED1_H3 = 1;DY_LED1_L4 = 0;}delay(DY_PWM);dis_off();i = d & 0x10;if(i == 0x10){DY_LED1_H3 = 1;DY_LED1_L5 = 0;}delay(DY_PWM);dis_off();i = d & 0x20;if(i == 0x20){DY_LED1_H3 = 1;DY_LED1_L6 = 0;}delay(DY_PWM);dis_off();i = d & 0x40;if(i == 0x40){DY_LED1_H3 = 1;DY_LED1_L7 = 0;}delay(DY_PWM);dis_off();i = d & 0x80;if(i == 0x80){DY_LED1_H3 = 1;DY_LED1_L8 = 0;}delay(DY_PWM);dis_off();}/******************************************************************************************* **/void displayHH4 (unsigned char d){ //第列横向显示程序unsigned char i;i = d & 0x01;if(i == 0x01){DY_LED1_H4 = 1;DY_LED1_L1 = 0;}delay(DY_PWM);dis_off();i = d & 0x02;if(i == 0x02){DY_LED1_H4 = 1;DY_LED1_L2 = 0;}delay(DY_PWM);dis_off();i = d & 0x04;if(i == 0x04){DY_LED1_H4 = 1;DY_LED1_L3 = 0;}delay(DY_PWM);dis_off();i = d & 0x08;if(i == 0x08){DY_LED1_H4 = 1;DY_LED1_L4 = 0;}delay(DY_PWM);dis_off();if(i == 0x10){DY_LED1_H4 = 1;DY_LED1_L5 = 0;}delay(DY_PWM);dis_off();i = d & 0x20;if(i == 0x20){DY_LED1_H4 = 1;DY_LED1_L6 = 0;}delay(DY_PWM);dis_off();i = d & 0x40;if(i == 0x40){DY_LED1_H4 = 1;DY_LED1_L7 = 0;}delay(DY_PWM);dis_off();i = d & 0x80;if(i == 0x80){DY_LED1_H4 = 1;DY_LED1_L8 = 0;}delay(DY_PWM);dis_off();}/******************************************************************************************* **/void diplay_data (unsigned char l,unsigned char d){switch (l){//显示的列位置case 1://displayHH1(d); //将显示数据送入break;//case 2://displayHH2(d); //将显示数据送入break;//case 3://displayHH3(d); //将显示数据送入break;//case 4://displayHH4(d); //将显示数据送入break;//}}/******************************************************************************************* **/void init (void){ //上电初始化P1M0 = DY_P1M0SET;P1M1 = DY_P1M1SET;P3M0 = DY_P3M0SET;P3M1 = DY_P3M1SET;////dis_off();DY_PWM = DY_LI;////TMOD = 0x11; // 定时/计数器,1工作于方式TH0 = 0x3c; // 预置产生ms时基信号EA = 1; // 开总中断ET0 = 1; // 定时/计数器允许中断TR0 = 1; // 开闭定时/计数器//////TIME_DD = 18; //时间在首次使用的值,之后会在EEPROM自动记录上一天的值//TIME_MO = 5; //初始时间:年月日周一,时分秒//TIME_YY = 9;//TIME_WW = 1;//TIME_HH = 22;//TIME_MM = 13;//TIME_SS = 40;}/******************************************************************************************* **/void main (void){ //主程序init();while (1){diplay_data (1,disdata[TIME_MM/10]);diplay_data (2,disdata[TIME_MM%10]);diplay_data (3,disdata[TIME_SS/10]+0x80);diplay_data (4,disdata[TIME_SS%10]+0x80);}}/******************************************************************************************* ***/void tiem0(void) interrupt 1{ // T/C0中断服务程序(产生ms时基信号)cou++; // 软计数器加if(cou > 19){ // 计数值到(1s)cou = 0; // 软计数器清零TIME_SS++; // 秒计数器加(进位ms*100=1s)if(TIME_SS > 59){ // 秒计数值到TIME_SS = 0; // 秒计数器清零TIME_MM++; // 分计数器加(进位s=1m)if(TIME_MM > 59){ // 分计数到TIME_MM = 0; // 分计数器清零TIME_HH++; // 时计数器加(进位m=1h)if(TIME_HH > 23){ // 时计数到TIME_HH = 0; // 时计数器清零}}}}TH0 = 0x3c; // 重置定时常数TL0 = 0xb0;}/******************************************************************************************* ***//*************************************************************/*************************************************************/。
51单片机4位数码管秒表代码
主题:51单片机4位数码管秒表代码内容:1. 介绍51单片机51单片机是一种通用的单片机系列,广泛应用于各种电子设备中。
它具有稳定性好、成本低、易于编程等优点,因此备受电子爱好者和专业工程师的青睐。
2. 4位数码管秒表4位数码管秒表是一种常见的电子计时器,通过LED数码管显示出当前的时间,可以用于各种计时应用,比如比赛计时、实验计时等。
3. 代码编写以下是一段简单的51单片机4位数码管秒表代码:```c#include <reg52.h>#include <intrins.h>// 数码管位选端口sbit wei1 = P2^2;sbit wei2 = P2^3;sbit wei3 = P2^4;sbit wei4 = P2^5;// 数码管显示段选端口sbit se2 = P0^2;sbit se1 = P0^3;sbit se4 = P0^4;sbit se3 = P0^5;unsigned char code smgduan[17] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71,0x00}; // 显示0~9,A,b,C,d,E,F,无的值void delay(unsigned int i) { // 延时while(i--);}void display(unsigned char *tab) { // 数码管显示 unsigned char i;for(i=0; i<7; i++) {P0=0; // 清除段选,以选中所显示的数码管 switch(i) { //确定位选case(0):wei1=0;wei2=wei3=wei4=1;break;case(1):wei2=0;wei1=wei3=wei4=1;break;case(2):wei3=0;wei1=wei2=wei4=1;break;case(3):wei4=0;wei1=wei2=wei3=1;break;default:break;}P0=tab[i]; //段码输出delay(5); // 数码管微秒级延迟}}void m本人n() {unsigned char a=0,b=0,c=0,d=0; //时钟的4位数据 unsigned int i=0;wei1=wei2=wei3=wei4=1; //段选、位选初始化while(1) {a++; // 微秒级的计数if(a==100) { //达到100a=0; b++; //b加1if(b==60) { //当b=60时b=0; c++; //c加1if(c==60) { //当c=60时c=0; d++; //d加1if(d==24) { //当d=24时d=0; //归零}}}}display(smgduan+d10); //显示个秒wei1=1;wei2=wei3=wei4=0; //位选delay(500); //延时display(smgduan+c/10+10); //显示十秒wei2=1;wei1=wei3=wei4=0; //位选delay(500); //延时display(smgduan+b10); //显示个分wei3=1;wei1=wei2=wei4=0; //位选delay(500); //延时display(smgduan+b/10+10); //显示十分wei4=1;wei1=wei2=wei3=0; //位选delay(500); //延时if(i++==200) { //当i=200时i=0;}}}```4. 代码分析该代码通过对51单片机的引脚进行控制,实现了4位数码管秒表的计时功能。
四位数码管工作原理 stm32
四位数码管工作原理 stm32STM32是一款高性能的微控制器,广泛应用于各种嵌入式系统中。
在嵌入式系统中,常常需要使用数码管来显示数字或字符信息。
本文将介绍数码管的工作原理,并结合STM32微控制器,探讨如何使用STM32驱动数码管。
数码管是一种能够显示数字或字符的电子显示器件。
它由多个发光二极管(LED)组成,每个LED可以独立控制发光与否。
根据LED 的排列方式和控制方式的不同,常见的数码管有共阳数码管和共阴数码管。
共阳数码管是指在数码管的每个LED的阳极都连接在一起,并与正极相连,而每个LED的阴极则分别独立连接到控制芯片的输出引脚。
当控制芯片将某个输出引脚的电平拉低时,对应的LED就会点亮。
通过控制不同的输出引脚,可以实现对数码管上各个LED的控制,从而显示不同的数字或字符。
共阴数码管与共阳数码管的原理基本相同,只是阳极和阴极的连接方式相反。
在共阴数码管中,每个LED的阴极都连接在一起,并与负极相连,而每个LED的阳极则分别独立连接到控制芯片的输出引脚。
当控制芯片将某个输出引脚的电平拉高时,对应的LED就会点亮。
在使用STM32驱动数码管时,需要通过控制STM32的输出引脚来控制数码管的LED。
以共阳数码管为例,假设数码管的每个LED分别连接到STM32的P0、P1、P2等输出引脚上。
当需要显示数字0时,将P0、P1、P2等输出引脚的电平拉低,对应的LED就会点亮;当需要显示数字1时,将P1、P2等输出引脚的电平拉低,P0引脚的电平拉高,对应的LED就会点亮,以此类推。
通过依次控制不同的输出引脚,可以实现对数码管的控制,从而显示不同的数字或字符。
为了方便控制数码管,我们可以编写相应的驱动程序。
首先,需要初始化STM32的输出引脚,并设置为输出模式。
然后,根据需要显示的数字或字符,通过控制相应的输出引脚的电平,点亮对应的LED。
为了实现动态显示,可以使用定时器中断来周期性地更新数码管的显示内容。
可预置数的4位计时器电路图
可预置数的4位计时器电路图计时器在数字电路中是一个常见的电子元件,它用于计算时间和频率。
本文将介绍一个可预置数的4位计时器电路图设计,可以用于实现许多计时器应用。
本设计使用CMOS技术,具有低功耗和高可靠性等优点。
下面,我们将讨论该电路的各个方面以及如何构建它。
设计要求该电路需要满足以下要求:1.实现可预置数值的计时器功能。
2.4个7段数码管用于显示计数结果。
3.使用 CMOS 技术实现,具有低功耗和高可靠性。
电路原理这个电路是由两个主要部分组成: 一个实现可预置计数的计数器和一个7段显示器。
计数器被控制以完成计数任务,而7段显示器用于显示数码。
可预置计数器可预置计数器使用74LS161集成电路(U1~U4)实现。
这是一个4位计数器,每个计数器有一个时钟输入和Ripple Up/Down控制。
此外,它还有4个可读/可写的并行加载预置输入。
这些输入用于预加载计数器,以便从预定值开始计数。
是可预载入计数器的简单示意图:可预载入计数器每个计数器的载入输入 (Pr) 被连接到 AND 门电路,用于根据 Pr-enable 输入和计数器控制信号的状态来控制数字的预置。
这些控制信号由另外一个74LS161( U5) 生成。
4位计数器的所有输出( Q0~Q3) 都被连接到 BCD数码显示器的输入端。
通过将计数器的二进制值转换成对应的BCD值,就可以控制显示器显示正确的数字。
BCD数码显示器本电路采用常见的共阴极式4位BCD数码管(段选型),其极性为共阴极,因此控制开关使能数字的输出。
每个数字字形由7个LED数码管组成,数字点由一个小LED指示灯表示。
数码管七段输入端是相应位置的数字选择器输入。
使用7447译U4的输出。
码器驱动数码管。
输入信号由计数器的BCD(Q0Q3)输出提供。
选通信号来自计数器U1BCD数码显示器电路图根据上述电路原理和设计要求,下面是可预置数的4位计时器电路的完整电路图:74LS161可预置计数器:Pr5 = /UD0 & /ISEL2 Pr4 = /UD0 & ISEL2Pr3 = /UD1 & /ISEL2 Pr2 = /UD1 & ISEL2Pr1 = /UD2 & /ISEL2 Pr0 = /UD2 & ISEL2U5和U6的接法如下:CP1 = /ISEL0 & /ISEL1CP2 = /ISEL0 & ISEL1CP3 = ISEL0 & /ISEL1CP4 = ISEL0 & ISEL17486异或门的接法如下:/UD0 = CP0 ^ CP1 /UD1 = CP1 ^ CP2/UD2 = CP2 ^ CP3 /UD3 = CP3 ^ CP4数码管(4个)和7447译码器的接法如下:7447 a b c d e f g--------|--|---|---|----|---|---|---NUM0 |0 |0 |0 |0 |0 |0 |1NUM1 |1 |0 |0 |1 |1 |1 |1NUM2 |0 |0 |1 |0 |0 |1 |0NUM3 |0 |0 |0 |1 |1 |1 |0NUM4 |1 |0 |0 |1 |1 |0 |0NUM5 |0 |1 |0 |1 |1 |0 |0NUM6 |0 |1 |0 |0 |0 |0 |0NUM7 |0 |0 |0 |1 |1 |1 |1NUM8 |0 |0 |0 |0 |0 |0 |0NUM9 |0 |0 |0 |1 |1 |0 |0总结本文介绍了一个可预置数的4位计时器电路图,该电路使用CMOS技术,具有低功耗和高可靠性等优点。
单片机计时器实训报告

一、前言随着科技的不断发展,单片机技术在我国得到了广泛的应用。
为了提高我国单片机技术人才的综合素质,我们学校特开设了单片机实训课程。
本次实训,我们以设计一个单片机计时器为课题,通过实际操作,加深对单片机原理及编程的理解,提高我们的动手能力和团队协作能力。
二、实训目的1. 掌握单片机的基本原理和编程方法;2. 学会使用单片机外围设备,如数码管、按键等;3. 提高动手能力和团队协作能力;4. 熟悉单片机在实际工程中的应用。
三、实训内容1. 计时器硬件设计(1)单片机选择:本次实训选用STC89C52单片机作为核心控制单元。
(2)数码管显示:选用共阴型4位数码管,用于显示计时器的计时值。
(3)按键控制:选用4个轻触开关,分别控制计时器的开始、暂停、复位功能。
(4)时钟电路:选用晶振作为时钟源,产生稳定的时钟信号。
2. 计时器软件设计(1)主程序:负责初始化硬件资源、扫描按键、处理按键事件、更新数码管显示等。
(2)计时功能:通过定时器中断,实现计时器的计时功能。
(3)按键处理:根据按键事件,控制计时器的开始、暂停、复位功能。
(4)数码管显示:根据计时器的计时值,更新数码管显示。
四、实训步骤1. 硬件制作:根据设计图纸,焊接电路板,安装元器件。
2. 硬件调试:检查电路连接是否正确,测试电路功能。
3. 软件编写:使用C语言编写程序,实现计时器功能。
4. 软件调试:在单片机上编译、烧录程序,测试程序功能。
5. 集成调试:将硬件和软件结合,进行整体调试。
五、实训成果1. 成功设计并实现了一个单片机计时器。
2. 掌握了单片机的基本原理和编程方法。
3. 学会了使用单片机外围设备,如数码管、按键等。
4. 提高了动手能力和团队协作能力。
六、心得体会1. 通过本次实训,我对单片机技术有了更深入的了解,认识到理论知识与实际操作相结合的重要性。
2. 在实训过程中,我学会了如何查阅资料、解决问题,提高了自己的自学能力。
3. 在团队协作方面,我学会了如何与他人沟通、分工合作,提高了自己的团队协作能力。
时、分、秒计时器的设计报告
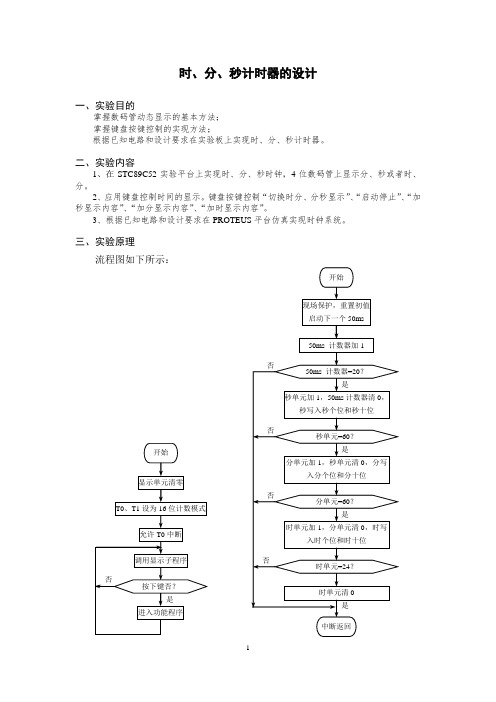
时、分、秒计时器的设计一、实验目的掌握数码管动态显示的基本方法;掌握键盘按键控制的实现方法;根据已知电路和设计要求在实验板上实现时、分、秒计时器。
二、实验内容1、在STC89C52实验平台上实现时、分、秒时钟,4位数码管上显示分、秒或者时、分。
2、应用键盘控制时间的显示。
键盘按键控制“切换时分、分秒显示”、“启动停止”、“加秒显示内容”、“加分显示内容”、“加时显示内容”。
3、根据已知电路和设计要求在PROTEUS平台仿真实现时钟系统。
三、实验原理流程图如下所示:11、主程序流程图2、定时器/计数器T0中断服务程序流程图5 仿真分析在Proteus ISIS的80C51中载入程序生成的HEX文件,按开始符号运行,在数码管上观察程序运行结果,系统仿真结果如图5.1所示。
设计功能如下:(1)、初始状态:未按键之前,上电,数码显示00-00-00。
程序运行后,从秒针开始自动运行。
当秒数到59后,下一秒自动变为00,分针变为01,以此类推。
(2)、调整状态:仿真运行过程中,按p0键,系统暂停,此时,继续按p0无效。
第三次按p0,又开始,如此循环。
(3)、设置状态:按下p0暂停后,按p1,则时针加一,按下p2,则时针减一;按两下p0,在按下p1,则分针加一,按下p2,则分针减一。
时间显示格式为:时分秒;误差分析:实际程序到实验板中的电子钟显示存在一定的误差,误差来源可能为三个方面:第一,在程序运行过程中,时钟周期的不精确导致机器周期与理论值存在一定的差别;第二在中断一秒显示过程中,一些指令需要消耗一定的机器周期,使得一秒延时比实际要长;第三在键抖动的反应程度在运行中比较慢。
25.1实例仿真总结通过这次的课程设计我认识到我对单片机的知识学的太少了,对于书本上很多知识还不能灵活运用,都需要去巩固加强,我会在以后的学习中弥补我的不足。
我也了解了80C51集成环境和PROTEUS仿真软件的使用,用此软件练习电子时钟的设计,不仅使我熟悉了软件的使用方法,而且复习了单片机编程的相关知识。
四位可预置位选倒计时器课程设计报告

四位可预置位选倒计时器课程设计报告一、选题背景随着科技的不断发展和应用,计时器在我们的日常生活中扮演着越来越重要的角色。
尤其是倒计时器,它可以帮助我们精确地掌握时间,有效地提高工作效率和生活质量。
本次课程设计选择了四位可预置位选倒计时器作为研究对象,旨在通过设计一个实用性强、功能齐全的倒计时器来满足人们对时间管理的需求。
二、选题目的本次课程设计主要有以下几个目的:1.了解四位可预置位选倒计时器的原理和工作方式;2.掌握倒计时器电路设计方法;3.学习数字电路中常用元件的使用方法;4.培养学生动手能力和创新思维。
三、课程设计内容本次课程设计主要分为以下几个部分:1. 倒计时器原理及工作方式介绍2. 倒计时电路设计3. 数字元件使用方法介绍4. 倒计时器实现5. 实验结果及分析四、倒计时器原理及工作方式介绍1. 倒计时器原理倒计时器是一种计时器,它可以在特定的时间内向后倒计时。
其原理是利用数字电路中的计数器和时钟信号来实现。
当倒计时开始时,计数器开始减少,直到减为零时,发出一个信号来提示倒计时结束。
2. 倒计时器工作方式倒计时器的工作方式分为两个阶段:预置阶段和计数阶段。
预置阶段:在这个阶段中,我们需要将所需的倒计时时间通过数字元件输入到倒计时器中。
这个过程称为预置操作。
计数阶段:在这个阶段中,倒计时器会根据预置的时间开始向后减少,并且在每次减少一个时间单位(如秒)后更新显示屏上的数字。
五、倒计时电路设计1. 倒计时电路设计原理本次课程设计采用74LS192集成电路作为主要控制芯片,并通过74LS47集成电路驱动共阳极LED数字显示管。
其中74LS192集成电路可以实现二进制下的加法和减法运算,因此可以方便地实现倒计时功能。
2. 倒计时电路设计步骤(1)确定所需的位数和精度;(2)选择合适的集成电路;(3)设计时钟电路;(4)设计倒计时电路;(5)设计数字显示电路。
六、数字元件使用方法介绍1. 74LS192集成电路74LS192是一种四位可预置位二进制同步计数器。
10S倒计时四路数显抢答器
三、电路框图
抢答部分
数码显示部分
倒计时部分
四、电路原理
电路分为3部分:稳压电源、抢答器、数显、10S倒计时电路
电源部分由变压器220~6V、整流桥、三端稳压块7805、电容C1、C2、组成。
220V的市电经过6V的变压器变成6V的交流电,经过整流,滤波,稳压管的稳压后输出直流5V的电压提供电源。
9
0
1
1
1
0
1
0
全部为0
灭
0
1
1
1
0
1
1
0
1
1
1
1
0
0
0
1
1
1
1
0
1
0
1
1
1
1
1
0
0
1
1
1
1
1
1
4511与LED显示电路
倒计时部分由NE555产生时钟脉冲,分频计数器CC40161,74LS192,译码器74HC4511,七段显示管组成。
NE555与RC组成的多谐振荡器将产生频率为10HZ的时钟脉冲。频率f=1.44/(R1+2R2)CNE555输出的时钟脉冲从CC40161的第二引脚输入给CC40161提供时钟脉冲,CC40161将进行计数因为CC40161可以计数到15所以要对CC40161进行置数,置数为6.经过CC40161计数后,CC40161的输出将是1HZ的时钟脉冲,提供十进制74LS192计数。从74LS192的第四引脚输入实现减法计数当74LS192的输出为0时这时将向十位借数。平时74LS192的13引脚都是高电平,当有借数时,会变成低电平。74LS192的输出通过译码器74HC4511进行译码,然后在七段显示管上显示出来。电路启动部分有启动开关S1控制。启动时,74LS192、CC40161都将进行置数。电路的暂停部分有抢答器的输出端控制,抢答器的输出端接四输入与非门74LS20,然后接非门74LS04,74LS04的输出端与NE555并接在与非门上。当没有抢答时,四输入与非门输入为高电平,输出为低电平,非门输出将为高电平,这时倒计时器连续计时;当有人抢答时,四输入与非门输入为低电平,输出为高电平,非门输出将为低电平,这时倒计时器将暂停。我们从倒计时器上可以算出抢答用多少时间。
4bitled数码管
4位LED数码管是一种常见的电子显示器件,由4个7段LED数码管组合而成,可以显示0-9的数字和某些英文字母。
每个7段LED数码管由7个LED发光二极管组成,可以显示数字或字母的轮廓。
通过控制每个LED的亮灭,可以显示出不同的数字和字母。
4位LED数码管通常具有公共端,可以通过控制公共端的电平来选择要显示的数码管。
同时,每个数码管的7个LED也可以通过控制相应的引脚来控制其亮灭,从而实现数字的显示。
在实际应用中,4位LED数码管常用于数字显示、计时器、频率计等场合。
由于其亮度高、寿命长、驱动简单等优点,因此在电子产品中得到了广泛的应用。
总之,4位LED数码管是一种非常实用的电子显示器件,可以满足各种数字显示需求,为电子产品增添更多的功能和美观性。
四位串行数码管小数点
四位串行数码管小数点一、四位串行数码管小数点的原理四位串行数码管小数点的原理主要是通过控制数码管的开启和关闭,来显示不同的数字和符号。
它采用七段数码管的结构,每个数码管由七个发光二极管组成,分别代表了数字的不同线段。
通过在不同的时间点给予不同的发光二极管电压,就可以实现不同数字的显示。
对于小数点,它实际上是数码管的第八个发光二极管。
当需要显示小数部分时,通过控制小数点的开启,将其发光,从而与整数部分进行区分。
四位串行数码管小数点广泛应用于各种数字显示场景,如计时器、温度计、电压表等。
由于其显示效果清晰、可靠性高,因此被广泛应用于各个行业。
例如,在计时器中,通过四位串行数码管小数点的组合,可以精确显示时间的小时、分钟和秒数,方便人们对时间的掌控。
在温度计中,通过四位串行数码管小数点的显示,可以直观地显示当前的温度数值,并且可以将小数部分进行精确显示,提高了温度计的测量精度。
三、四位串行数码管小数点的发展趋势随着科技的不断进步,四位串行数码管小数点也在不断发展。
一方面,随着集成电路技术的进步,数码管的体积越来越小,显示效果越来越好。
目前,已经出现了更小尺寸的数码管,可以在更多领域得到应用。
另一方面,随着人工智能技术的快速发展,四位串行数码管小数点也可以与其他智能设备进行连接,实现更多功能。
例如,可以将四位串行数码管小数点与温度传感器相结合,实现实时温度的显示和报警功能。
同时,还可以与其他传感器相结合,实现更多的监测和控制功能。
四位串行数码管小数点作为一种常见的数字显示设备,具有广泛的应用前景。
随着技术的不断进步,它将在更多领域发挥重要作用,为人们的生活带来便利。
同时,我们也期待未来更多新型的数字显示设备的出现,为人们的生活带来更多的惊喜和便利。
4位数码管循环

4位数码管循环4位数字管循环是一种电子显示器件,通常用于显示数字。
它由一系列的发光二极管(LED)组成,可以通过控制LED的亮灭来显示不同的数字。
每个数字由7个LED组成,分别代表该数字的不同部分,例如上、上左、上右、中、下左、下右和下。
通过控制每个LED是否亮灭,可以显示任意数字。
4位数字管循环具有很多应用,可以用于时钟、计时器、温度显示器、计数器等。
它非常常见,几乎可以在生活的各个领域见到它的身影。
接下来,我们将从原理、显示方式和应用三个方面详细介绍4位数字管循环。
首先,我们来了解一下4位数字管循环的原理。
它由一个计数器和一个编码器组成。
计数器用来递增数字,从0到9,然后循环到0。
编码器用来将计数器的输出转换为对应的LED亮灭状态,以显示相应的数字。
计数器和编码器之间通过电子部件连接,控制信号流动,从而实现数字的循环显示。
接下来,我们来了解一下4位数字管循环的显示方式。
在每一个时刻,4位数字管循环只显示一个数字。
显示的四位数字依次排列,从左到右。
通过计数器和编码器的控制,依次显示0、1、2、3……9,然后再循环回0。
这种循环显示的方式使得数字能够连续地在4位数字管上显示,给人一种流动的感觉。
最后,我们来了解一下4位数字管循环的应用。
它广泛应用于各种计时和计数设备中。
例如,我们可以将它用于显示时钟。
通过将4位数字管循环与时钟芯片连接,可以实现精准的时间显示。
此外,它还可以用于计时器,例如比赛计时器、烹饪计时器等。
通过控制4位数字管循环的显示,可以实现秒表功能。
另外,它还可以用于温度显示器,通过将4位数字管循环与温度传感器连接,可以实时显示当前温度。
这样,人们可以方便地了解当前环境的温度变化。
除了以上应用外,4位数字管循环还可以用于计数器。
例如,我们可以将它用于自动售货机中,通过计数器对销售商品的数量进行统计和显示。
此外,它还可以用于电子秤,通过显示当前物品的重量。
这样,人们可以方便地了解物品的重量信息。
TM1637四段数码管模块驱动

TM1637四段数码管模块驱动:轻松上手,点亮你的数字生活一、模块简介1. 支持共阴极或共阳极数码管;2. 内置键扫描电路,可驱动8个按键;3. 通过两个IO口与单片机通信,节省IO资源;4. 可调节显示亮度,满足不同环境需求。
二、模块接口及引脚功能TM1637四段数码管模块共有6个引脚,分别为VCC、GND、DIO、CLK、KEY1和KEY2。
各引脚功能如下:1. VCC:电源正极,接3.3V或5V电源;2. GND:电源负极,接GND;3. DIO:数据输入/输出引脚,与单片机IO口相连;4. CLK:时钟引脚,与单片机IO口相连;5. KEY1、KEY2:按键引脚,可接至单片机IO口,实现按键功能。
三、驱动原理TM1637四段数码管模块的驱动原理如下:1. 初始化:上电后,对TM1637进行初始化,设置显示亮度、扫描频率等参数;2. 数据写入:通过DIO和CLK引脚,将显示数据写入TM1637内部寄存器;3. 显示更新:TM1637内部自动扫描数码管,根据寄存器中的数据更新显示内容;4. 按键扫描:TM1637内置键扫描电路,可实时检测按键状态,并将结果输出至单片机。
四、编程控制1. 引入TM1637库文件;2. 初始化TM1637对象,并设置CLK和DIO引脚;3. 编写显示函数,将数据写入数码管;4. 编写按键扫描函数,检测按键状态。
include <TM1637.h>// 定义CLK和DIO引脚define CLK 2define DIO 3TM1637 tm1637(CLK, DIO);void setup() {// 初始化TM1637tm1637.init();// 设置显示亮度(07)tm1637.setBrightness(5);}void loop() {// 显示数字09for (int i = 0; i < 10; i++) {tm1637.display(i);delay(1000);}}五、模块应用场景1. 时间显示:制作时钟、计时器等,实时展示时间信息;2. 温度显示:配合温度传感器,实时监测环境温度;3. 电压/电流显示:用于电子秤、电源等设备,显示电压或电流值;4. 计数器:用于运动会、比赛等场合,记录选手成绩或得分;5. 智能家居:作为家居设备的一部分,显示各种传感器数据。
FPGA计时器

桂林电子科技大学职业技术学院实训报告桂林电子科技大学职业技术学院FPGA实训报告计时器学院(系):电子信息工程系专业:电子信息工程技术学号: ===========学生姓名: =======指导教师: ========桂林电子科技大学职业技术学院实训报告目录目录 (2)摘要 (3)2 课题背景 (4)2.1设计任务与要求 (4)2.2设计目的 (4)2.2.1 设计题目的概述 (5)3 总体设计方案 (5)3.1 设计思想 (5)3.2方案选择与论证 (5)4 硬件功能描述 (6)4.1动态显示模块 (6)4.2综合引脚配置 (7)5软件设计 (9)5.1软件流程图及功能介绍 (9)5.2 核心程序设计 (10)6调试 (12)7结论 (12)摘要FPGA(Field-Programmable Gate Array),即现场可编程门阵列,它是在PAL、GAL、CPLD等可编程器件的基础上进一步发展的产物。
FPGA以设计灵活、速度快、功耗低的特点,在集成电路设计中得到广泛应用。
在我们的实际生活中,高精度计时器常用于体育竞赛及各种要求有较精确定时的技术领域中。
通常采用中规模集成电路即可实现高精度计时器的设计。
本次设计的计时器包括3个模块:时钟分频模块、开关及控制模块、显示模块,以完成此计时器所界定的功能。
对各个功能模块进行硬件描述以后,可以采用新一代可编程逻辑器件开发软件平台Verilog HDL,进行逻辑功能仿真与时序验证,并在FPGA开发板上进行了综合和适配。
关键词 : 计时器 FPGA Verilog HDL1 绪论在我们的实际生活中,高精度计时器常用于体育竞赛及各种要求有较精确定时的技术领域中。
通常,采用中规模集成电路即可实现高精度计时器的设计。
本项研究将基于新一代硬件描述语言(HDL)、采取ASIC(专用集成电路)设计方法,来实现秒、分计时器的前端设计。
本设计利用VHDL语言采用自顶向下的方法完成了计时器的设计,最后在FPGA开发板进行测试。
数码管3461as参数

数码管3461as参数
一、数码管概述
数码管是一种常用的显示器件,它可以将数字信息以可视化的形式展示给用户。
数码管的应用范围广泛,从电子产品到工业设备,都可以看到它的身影。
在众多数码管型号中,3461as是一款具有较高性价比的数码管。
二、数码管3461as的参数特性
1.显示位数:3461as数码管为四位显示,可以显示0-9的数字。
2.段码:3461as数码管采用共阳极设计,具有较少的引脚,便于连接。
3.尺寸:3461as数码管的尺寸较为紧凑,适合各种有限空间的应用。
4.工作电压:3461as数码管的工作电压范围为4.5V-6.5V,适应不同电源环境。
5.功耗:3461as数码管的功耗较低,有利于延长设备的使用寿命。
6.稳定性:3461as数码管具有较高的稳定性,可长时间运行。
三、3461as数码管的应用领域
1.电子产品:3461as数码管广泛应用于各种电子产品,如计时器、计数器、电子钟表等。
2.工业设备:由于3461as数码管具有较高的稳定性和可靠性,它也成为许多工业设备的首选显示器件。
3.汽车电子:3461as数码管可用于汽车电子设备,如里程表、转速表等。
4.医疗设备:3461as数码管在医疗设备中的应用也越来越广泛,如心电图仪、血压计等。
四、总结
3461as数码管凭借其优异的性能和实用的特性,在众多显示器件中脱颖而出。
无论是电子产品、工业设备,还是汽车电子和医疗设备,3461as数码管都能发挥出良好的显示效果。
4位半数码管驱动ic
4位半数码管驱动ic4位半数码管驱动IC是一种常用的电子元件,用来控制和驱动4位数码管的显示。
它在电子制造业中扮演着重要的角色,广泛应用于各种计时器、测量仪器、电子钟表等设备中。
本文将从工作原理、特点、应用领域等方面,综合介绍4位半数码管驱动IC的相关知识。
首先,我们来了解一下4位半数码管驱动IC的工作原理。
它基于集成电路技术,内部集成了多个逻辑门、锁存器、驱动器等功能模块。
通过外部控制电路的输入信号,可以实现对数码管的控制。
具体而言,它可以根据输入的数据信号,通过逻辑运算和锁存操作,将对应的数字码输出到数码管的对应位置上,实现数字的显示。
4位半数码管驱动IC具有很多特点。
首先,它体积小,功耗低,结构紧凑,便于集成到各种电子设备中。
其次,它具有较高的工作稳定性和可靠性,能够长时间保持数码管的正常显示。
另外,它还具有广泛的工作电压范围和电流驱动能力,可以适应不同的工作环境和需求。
4位半数码管驱动IC在各个领域具有广泛的应用。
在计时器方面,它可以用于电子钟表、秒表、倒计时器等设备中,实现时间的精确显示和计时功能。
在测量仪器方面,它可以被用作数字电压表、电流表、频率计等设备中,方便用户进行数据的读取和显示。
此外,它还可以应用于数码温度计、数码计数器等各种仪器设备中。
对于DIY爱好者和电子爱好者来说,4位半数码管驱动IC也是非常有用的。
通过自己搭建电路,可以将它用于各种个性化的小制作中,如数字时钟、计数器等,达到独特的效果。
总而言之,4位半数码管驱动IC是一种非常重要的电子元件,在电子制造业和各种设备中拥有广泛的应用。
它的工作原理基于集成电路技术,具有体积小、功耗低、工作稳定等特点。
无论是在计时器、测量仪器,还是在个人制作方面,它都能发挥重要的作用。
希望通过本文的介绍,读者能够更加了解和认识这一独特的IC元件,为电子制作和应用提供指导和参考。
4位共阳-共阴极-LED数码管

4位共阳-共阴极-LED数码管前言LED数码管由多个发光二极管组成,可以显示数字和其他字符。
它们是计算机和电子设备上最常见的视觉显示元件之一。
数码管分为共阳极和共阴极两种类型。
在此文档中,我们将探讨4位共阳-共阴极-LED数码管。
4位共阳-共阴极-LED数码管概述4位共阳-共阴极-LED数码管是一种常见的LED数码管之一。
它允许您显示从0到9之间的数字,以及一些其他字符。
4位数码管由4个共阳或共阴的LED数码管组成。
每个数码管由7个大小不同的短杠组成,这些短杠可以组成数字和字符,例如’A’和’E’。
共阳极4位数码管和共阴极4位数码管之间的区别在于极性。
4位共阳极数码管中,所有阳极都连接在一起,而阴极是分别控制的;而在4位共阴极数码管中,所有阴极都连接在一起,而阳极是分别控制的。
4位共阳-共阴极-LED数码管的特点1. 星型排列4位共阳-共阴极-LED数码管通常排列成星形。
星形排列对于阅读数字和字符非常方便,因为它使它们非常清晰且易于读取。
此外,4位共阳-共阴极-LED数码管的排列方式还允许它们在计算机中常见的矩形电路板上排布。
2. 可靠性4位共阳-共阴极-LED数码管可以在广泛的电压和温度范围内工作。
即使在恶劣的环境下也可以正常工作,同时,这些数码管还具有长寿命和抗微震动的特点。
3. 低功耗与其他显示设备相比,4位共阳-共阴极-LED数码管的功耗非常低,这使得它们非常适合使用在便携设备上。
如何使用4位共阳-共阴极-LED数码管4位共阳-共阴极-LED数码管非常适合用于倒计时器、计时器和温度计等应用中。
使用它们时需要将它们连接到控制器或芯片中,以便能够控制它们的显示内容。
通常,驱动4位共阳-共阴极-LED数码管需要一个控制芯片,例如74HC595芯片。
该芯片可以通过串行数据链路控制数码管的每个段。
在本文档中,我们介绍了4位共阳-共阴极-LED数码管的概述、特点以及如何使用它们。
4位共阳-共阴极-LED数码管具有独特的星形排列方式,可靠性高,低功耗等特点。