机械创新设计作品(专业材料)
《第一届全国大学生机械创新设计大赛决赛作品集》目录

《第一届全国大学生机械创新设计大赛决赛作品集》东北大区作品仿生机器蟹(哈尔滨工程大学)设计者:季宝锋刘德峰贾守波宋辉王刚指导教师:王立权陈东良刁彦飞螺旋传动管道机器人(哈尔滨工业大学)设计者:赵琦黄玉磊汪盛梁涛王玺唐能指导教师:宋宝玉焦映厚微定位仿生机器人(哈尔滨工业大学)设计者:侯磊石建军张乐敏乔遂龙周超王婷婷黎映相孙彬指导教师:邓宗全焦映厚孙立宁李满天基于并联机构和分布式控制系统的多功能机器人(哈尔滨工业大学)设计者:卢贤资刘明宇王祺刘强徐宇声刘祥雨周达顺指导教师:孙雅洲梁迎春焦映厚邓宗全轮足式机器人(长春理工大学)设计者:冯辉李荣张伙林刘国栋徐椿明兰宁荣大卓胡永宏刘洋周清指导教师:武秀东刘悦胡贞宋正勋机械式停水自闭水龙头(大连理工大学)设计者:于春宇孙灵俊指导教师:梁延德蚯蚓式爬行器(大连理工大学)设计者:王俊鹏李刚王宁全璐琳指导教师:梁延德圆柱凸轮数控铣削装置(东北大学)设计者:李兆维袁娜刘权利黄常舒指导教师:王仁德爬杆(绳)机器人(辽宁工程技术大学)设计者:梁文林许洪强李书新李再峰指导教师:何凡付治国新型大力钳(吉林大学)华北大区作品多功能齿动平口钳(北京化工大学)设计者:王建杨攀指导教师:王永涛微生物培养液自动抽取喷涂机(中国农业大学)设计者:徐结徐赫指导教师:张铁中爬杆管道两用机器人(北京航空航天大学)设计者:洪振军郑亮何帆杨亚涛周煊指导教师:范悦基于仿生的高适应性六足机器人(北京航空航天大学)设计者:吴文镜王剑薇过为贺仕伟孙明锋郑广强佟铁锋指导教师:王卫林仿生虫(北京航空航天大学)设计者:刘小明尹益平赵同钢赵鹏王云飞指导教师:张欣便携式助立器(北京工业大学)设计者:赵广宁冯伟周瑞洪毅张子祺赵敬元指导教师:王大康自行车防盗锁(北京科技大学)设计者:穆树亮指导教师:张少军无线遥控爬杆喷漆机器人(天津大学)设计者:卢鸿斌张莹李娜指导教师:杜玉明摩擦式电动翻谱台(天津大学)设计者:唐晓磊于滂倪宗悦农帅指导教师:车建明爬楼梯机器人(北京交通大学)设计者:张克涛温平李翔指导教师:方跃法房海蓉西北大区作品新型球形机器人(西安电子科技大学)设计者:沈宣江严军牛波甘运维林星陵侯俊利吴颖丁裕诚指导教师:李团结朱玉超杨小瑜新型纱线卷绕防叠试验机(西安思源职业学院)设计者:李阳李明牛科李京王栋雷辉指导教师:刘琦云方形区域喷灌龙头(西北工业大学)设计者:柏龙岳映章余朝举张彬李哲指导教师:葛文杰、 .环卫伴侣——多功能自走式环保清洁车(陕西科技大学)设计者:张江峰张大伟赵志明叶恒青苏源博魏军学兰晓青顾纪超指导教师:李思益张彩丽刘俊生军地两用全自动担架车的研制(第二炮兵工程学院)设计者:潘兴杰蒲鹏程黄伟伟余亮戴胜东指导教师:岳应娟熊磊周凯上下楼梯搬运器(新疆大学)设计者:谈建平宝英巴特王超努尔比亚贾殿锋指导教师:穆塔里夫阿赫迈德王湔油罐车注油自动控制系统(新疆大学)设计者:西克热木阿里木热孜万古丽肉孜古丽指导教师:伊里哈木穆合塔尔陈宏伟源源(球形机器人)(西安思源职业学院)设计者:孙华雷张晓峰唐怀丹焦荣指导教师:马维新新型揉搓式全自动洗衣机(陕西科技大学)设计者:屈菲张义盟张江峰叶恒青指导教师:贺炜王宁侠唐平智能型全开式窗户(兰州交通大学)设计者:王欣欣李伟岭指导教师:李万祥牛卫中华东大区作品新型立轴风力机(安徽工业大学)设计者:杜志高王睿孙自闽钟昌彬陈厚富陈伟军陈献张世勇刘肥李超指导教师:邱支振陈富强顾小林仿生机械——虫虫“小强”(浙江大学)设计者:胡军柯党田峰许正蓉指导教师:沈萌红三自由度微位移工作台(合肥工业大学)设计者:杨飞谢俊谢祖强张永斌汪念平指导教师:赵韩沈健仿生壁虎(浙江大学)设计者:张俊伍中宇刘炜焘指导教师:钱向勇汽车转向同步照明灯(哈尔滨工业大学威海分校)设计者:张连清刘纪涛肖阿阳时凯张立伟常青张洪勋林乐川指导教师:刘会英赵继俊王毅机器鱼尼莫(东南大学)设计者:王春健梁健付月明关鸿耀李明宋春峰赵薇张徐指导教师:王兴松许映秋自适应可翻转探测车(东南大学)设计者:徐侨荣胡彬彭竹云彭时林指导教师:王兴松许映秋液体流动阻尼式高楼逃生器(福州大学)设计者:叶强杨谊昌张国欣指导教师:叶仲和蓝兆辉刘开昌脉动式无级变速器(南昌大学)213设计者:杜小波郭立华叶震肖文鑫指导教师:黄兴元杨湘杰徐春水可折叠崎岖表面自适应障碍小车(上海交通大学)设‘计者:王玮彦袁君华丁琛瑜刘栩之李丰园指导教师:马培荪易拉罐空罐有偿回收装置(华东理工大学)设计者:巩彬彬指导教师:安琦中南大区作品行星轮式登月车(中国人民解放军国防科技大学)设计者:张佩柴世良周峰常伟陈坤指导教师:潘存云翁飞兵尚建忠健身洗衣机(华南理工大学)设计者:卢俊林世富指导教师:朱文坚智能洁地机器人(中南大学)设计者:汤展跃董惠柏指导教师:何竞飞机器昆虫步行机构(华南农业大学)设计者:董竹英魏浩华黄灿权黄章华指导教师:陈佳琦气动式龙眼去核机(华南农业大学)设计者:林楚帆张志辉陈嘉慧谢文彬许巨忠丁桂阳指导教师:谢海军吸附式蠕动探测维修机器人(海军工程大学)设计者:丰利军郜世杰张勇孟宇裴晶晶王菊花汪丹丹指导教师:江汉红摆盘式特种发动机(海军工程大学)设计者:王文斌张振有袁鹏胡照于振动指导教师:王德石仿生机械灵巧手(华中科技大学)设计者:赵信毅张庆春张布卿冯玮刘全国刘辉王政指导教师:吴昌林杨家军履带式水下铺设机(华中科技大学)设计者:张志甜黄海清牛毅徐天明指导教师:吴昌林两足行走机器人(湖南大学)设计者:王雄波姚凌云陈士剑吴占涛李丽冯长林汪祥指导教师:刘江南严贻满王虎符西南大区作品半球体螺旋槽数控研磨机(重庆大学)设计者:彭万彬李俊向拾文罗勇指导教师:袁绩乾陈国聪张济生带辅助环的楔铁式超越离合器(重庆工商大学)设计者:贺术祥陈雄陈敏指导教师:杜力环保型手推式草坪剪草机(昆明理工大学)设计者:胡永鹏李治威谭阳尤川宝何亮吴锋指导教师:谭蓉环卫保洁清扫自行车(西南科技大学)设计者:谭伟丰航驰指导教师:陈晓勇机械式自适应上下非等高台阶小车(成都电子机械高等专科学校) 设计者:甘保军刘维江磊洪小飞钟宁王超玉刘浪指导教师:胥宏宋呜霍平球形机器人运动机构(成都大学)设计者:李凯陈茂林杨杰李小林杨霞宋磊指导教师:董万福无级变速轮系操纵机构(重庆工学院)设计者:罗剑波杜潇指导教师:林昌华液压式无级变速器(西南交通大学)设计者:钱海挺郑家坤李小易李永生指导教师:刘桓龙潘惠龙谢进异形齿轮泵(四川工程职业技术学院)设计者:李雷胡茂林胡建国朱明军郑家兵郑立和指导教师:陈洪涛冷真龙周奎附录一批复附录二获奖名单。
2019年第三届全国大学生机械创新设计大赛作品——小型手推式扫地拖地车.doc

小型手推式扫地拖地车2008年5月目录第一篇团队简介第二篇项目简介第三篇市场调研第四篇项目可行性分析第五篇项目进程计划书第六篇项目制作心得体会第一篇团队简介团队名称:地大飞扬团队团队理念:没有最好,只有更好!团队口号:我坚持,我胜利!团队指导老师:曾小慧:中国地质大学(武汉)机械与电子信息学院机械系副教授,现在中国地质大学机电学院从事教学与科研工作,并兼任湖北省机械原理教学研究会副理事长。
王院生:中国地质大学(武汉)机械与电子信息学院机械系讲师,现在中国地质大学机电学院从事教学与科研工作,并指导学生参与科研立项。
团队成员:周敏:男,中国地质大学(武汉)机械与电子信息学院机械设计制造及其自动化专业05级本科生,曾就读于数理学院,后转专业至机械专业,对机械设计方面兴趣很大。
在校期间努力学习专业基础知识,成绩始终保持在年级前茅;在课余时间,很注重专业能力的培养以及专业实践操作,在假期多次参与机械加工制造方面的实习,有着很强的理论知识和动手能力,观察创新能力出众,团队意识强烈,有着丰富的经验,责任感强。
现为团队负责人。
张思文:男,中共预备党员,中国地质大学(武汉)机械与电子信息学院机械设计制造及其自动化专业05级本科生,现任072052班学习委员。
擅于造型设计,思路严谨缜密,曾多次参与院校科技创新活动,对图标设计及软件操作方面很有兴趣;擅长SOLIDWORKS、PHOTOSHOP、FLASH的操作,对于机械专业相关课程具有扎实的基础,熟悉机械设计思路方法,动手能力较强。
现为团队主要技术人员。
马昌明:男,中国地质大学(武汉)机械与电子信息学院机械设计制造及其自动化专业05级本科生,现任072052班科技信息委员。
精通CAD,擅长三维绘图软件PRO/E、SOLIDWORKS的操作,曾绘制过多样设备组装图;专业知识扎实,成绩优异,擅于设计分析,曾在老师辅导下绘制大型项目工程图。
现为团队主要制图人员。
赵磊:男,中共预备党员,中国地质大学(武汉)机械与电子信息学院机械设计制造及其自动化专业05级本科生,武汉大学市场营销双学位在读。
机械创新大赛作品简介(doc 8页)

机械创新大赛作品1 助立椅参赛学校:华南理工大学参赛者:毕经元、龙志健、万明远,指导教师:张铁、李杞仪作品内容简介本作品是一张方便老年人或者腿脚不便的人站立的椅子。
主要是通过使用者上肢的运动来带动一面的动作,从而可以调整人的坐姿与重心,来减少下肢的运动来实现站立姿势。
本机构主要用到了平面连杆以及其它一些机械结构来实现椅面的调整,来带动使用者的行动。
并且如果使用者需要的话,在坐下来的时候也可以起到减少其下肢运动的作用。
主要创新点我们主要是考虑到老年人或者其他腿脚不方便的人群,在站起来的时候总是很费力;而且往往在坐下来的过程中也是一屁股就坐了下去。
为了改变这样的状况,我们将人站立过程中的手脚并用,该为手起到主要作用,方便特殊人群。
推广应用价值我们的社会对老年人的关爱渐见凸现,在这样的背景下,对老年人日常行动的关爱也就更为重要了。
而且对于特殊群体,比如下肢受伤,残疾等等的人群,我们的设计也可以助他们一臂之力。
方便了使用者日常行动,而且也减轻了子女或者看管人的看护负担。
这样的话,他们坐下就不愁再站起来了。
2 自动搀扶助步车参赛学校:青岛大学参赛者:王新刚、曹志强、郑虎阶、徐晟、孙海峰,指导教师:师忠秀、庞严英作品内容简介本产品主要应用于腿部残疾、腿部骨折处于恢复期的病人。
主要运用了自动检测和电器控制的原理;巧妙地将助步车和动力装置结合起来,实现了动力助步;并添加了单片机系统、光电检测装置以及继电器,可以自动检测病人的行动意图,并且实现了车随人动。
该车充分考虑了不同使用者的需要,设置了多种不同的工作模式;另外,本车增添了多处人性化设计及安全保护措施,结构简单、操作方便、产品的可靠性高;创新地利用支撑板代替双拐,这样可以减轻病人长时间拄拐带来的劳累;由于该车操作的方便性以及车身对人体的搀扶作用,病人可以独立使用,从而大大减轻家人及护士的负担。
基本技术指标:1、整车指标:速度0~0.5m/s连续可调;电机:DC12V、46rpm、P=15W。
第三届全国大学生机械创新设计大赛决赛作品选集PPT课件
郑岳久、张晓伟、郑 亮、何晓 晓、高国景
王子羲、季林红
孙天夫、叶景辉、罗 曾亚坚
婧、李
哲、 梁延德、马雅丽
魏
琦、张 曼、王 杨友彬
超、陈元旭、
张晓玲、房瑞明
3
作品名称 人力除冰车 “保时洁”——手推式清扫拖地车 新型高速公路护栏清洗装置 便捷护栏清洗车 变径滚刷清扫车 护栏清洗机 自动转向清洁车 有压雪功能的小型扫雪机 智能垃圾箱 全自动双面擦窗器 垃圾广告清除机 擦墙“蜘蛛匣” “飞水走壁”——游泳池壁清洗机
录
参赛者
指导教师
宋 哲、占云志、龚 晶、江长 春、张 希
周成龙、张忠廉
李亮勋、邓淋中、陈 磊、邵成 成、王 斯
姜新波、郑 燕
李国昌、屈云朋、毛斐然、魏琦 明、王安仕
王春耀、闵 磊
姜海滨、张 鹏、陈珂鑫、王金 玲、李 杨
徐长顺、张 辉
黄沛盛、林 彬、陈建科、欧明 树、林宏典
王玉兴、韦谢恩
郭 瑞、侯文慧、刘学敏
陈国定、葛文杰 2
作品名称 “艾米”号远程水下操控采样平台 水射流式清洗机器人 蜘蛛侠——高楼玻璃幕墙清洗机器人 自适应管道清洁机器人 “福娃”爬杆清洁除冰智能机器人 楼梯清扫机器人 推吸型高空清洁机器人 真空吸盘式爬壁清洗机器人 水草及水面漂浮物清理装置 智能水上清洁船 湖面清洁卫士 仿生水面清理机器人 电线除冰器
王晶 主编
高等教育出版社 高等教育电子音像出版社
1
目
作品名称 废旧电池回收机 废弃卫生筷再造铅笔机 滚筒式残膜回收机 饮料瓶易拉罐有偿回收机 废旧电池加工处理机 饮料瓶捡拾器 环保船 新型环境侦测机器人 太阳能停车场门禁系统 新型植树挖坑机 喷涂包树机 水葫芦等浮生植物快速打捞机
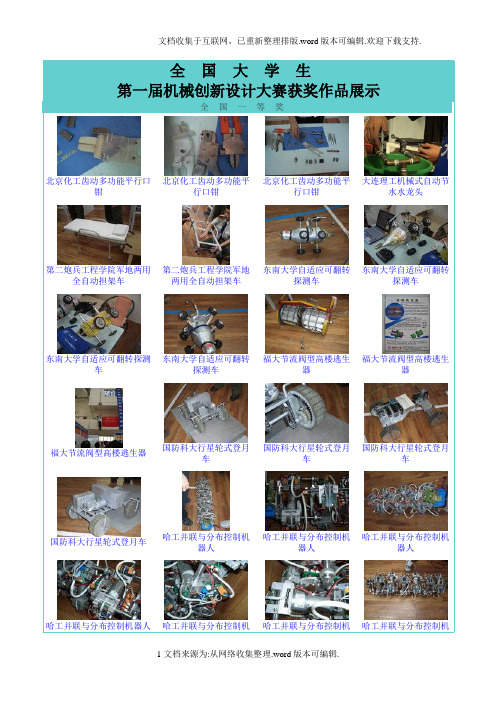
全国大学生机械创新设计大赛参赛作品

全国大学生机械创新设计大赛参赛作品(总5页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--全国大学生第一届机械创新设计大赛获奖作品展示全国一等奖北京化工齿动多功能平行口钳北京化工齿动多功能平行口钳北京化工齿动多功能平行口钳大连理工机械式自动节水水龙头第二炮兵工程学院军地两用全自动担架车第二炮兵工程学院军地两用全自动担架车东南大学自适应可翻转探测车东南大学自适应可翻转探测车东南大学自适应可翻转探测车东南大学自适应可翻转探测车福大节流阀型高楼逃生器福大节流阀型高楼逃生器福大节流阀型高楼逃生器国防科大行星轮式登月车国防科大行星轮式登月车国防科大行星轮式登月车国防科大行星轮式登月车哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工大微定位仿生机器人哈工大微定位仿生机器人海军工程大学摆式特种发动机天津大学爬杆喷漆机器人天津大学爬杆喷漆机器人中国农大菌液自动抽取喷涂机中国农大菌液自动抽取喷涂机重庆大学半球体螺旋沟槽数控研磨机重庆大学半球体螺旋沟槽数控研磨机重庆大学半球体螺旋沟槽数控研磨机?全国二等奖北工大助北工大助北工大助力长力器力器器春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人大连理工蚯蚓爬行器大连理工蚯蚓爬行器东北大学圆柱凸轮数控铣削加工装置哈工程螺旋传动管道机器人海军工程大学舰船探测者海军工程大学舰船探测者华东理工易拉罐有偿回收装置/华南理工健身洗衣机华南农大气动式龙眼去核机华南农大气动式龙眼去核机南昌大学脉动式无极变速器上海交大可折叠崎岖表面自适应障碍小车上海交大可折叠崎岖表面自适应障碍小车西安电子科大新型球形机器人西安思源学院纱线卷绕防叠机西北工业大学方形区域喷灌龙头西南交大液压式无极变速器西南科大环卫保洁西南科大环卫保洁清扫浙大虫虫小强浙大虫虫小强清扫自行车自行车全国三等奖安徽工大新型立轴风力机北航仿生虫北航基于仿生的高适应性六足机器人北航爬杆爬管道年用机器人北科大自行车防盗锁成都大学球形机器人运动结构创新设计成都电机高专自适应上下非等高台阶小车东南大学智能机器鱼哈工大汽车同步照明灯湖大两足行走机器人华南农大机器昆虫步行机构华中科大仿生机械灵巧手昆明理工草坪剪草机兰州交大智能型全开式窗户辽宁工程技术大学爬杆爬绳机器人陕西科大揉搓式洗衣机陕西科多功能自走式清洁车四川工程职业技术学院异形齿轮泵天津大学双轴连动摩擦式翻谱台西华大学科氏加速度观察试验台新疆大学上下楼梯搬运机器人浙大仿生壁虎重庆工商大学楔铁式滚针超越离合器重庆工学院无机变速行星轮系操纵机构第二届机械创新设计大赛参赛作品展示螺旋电机爬楼梯机器人自行履带闭链两足步行机器人轻便按摩器新型三维仪自动清洁器旋转展示台仿生虫家用采棉机爬杆机器人。
大学生工程训练综合能力竞赛 机械创新设计 湖北省预赛一等奖作品
“燕反哺”——以重力势能与动能转换驱动的摆球“永动器”指导老师:袁焕参赛学生:杨洋(08级车辆工程)梅迎春(08级车辆工程)周红瑞(08级交通运输)目录绪论 (3)课题来源 (3)作品意义 (3)产品应用 (3)1设计说明书 (4)1.1、原理设计与计算 (4)1.1.1、原理设计 (4)1.1.2、计算 (5)1.2、结构设计与计算 (7)1.2.1、结构设计 (7)1.2.2、计算 (8)1.3、装配图设计与图纸 (10)1.3.1、装配图设计 (10)1.3.2、装配图图纸 (10)2工程管理方案 (11)2.1、工作任务分解 (11)2.2、进度计划 (12)2.3、质量控制 (12)2.3.1加工精度 (12)2.3.2、表面质量 (14)3加工工艺方案 (16)3.1、底座 (16)3.1.1、加工方法 (17)3.1.2、工序和工步内容 (17)3.1.3、定位与装夹 (18)3.1.4、机床与刀具 (18)3.2、基座 (18)3.2.1、加工方法 (19)3.2.2、工序和工步内容 (19)3.2.3、定位与装夹 (21)3.2.4、机床与刀具 (21)3.3、外壳 (21)3.3.1、加工方法 (21)3.3.2、工序和工步内容 (21)3.3.3、定位与装夹 (22)3.3.4、机床与刀具 (22)4成本分析方案 (23)4.1、标准件成本 (23)4.2、材料成本 (23)4.2.1、钢材 (23)4.2.2、其他 (24)4.3、加工成本 (25)5徽标设计制作 (26)5.1、设计思想 (26)5.2、制作加工方法 (26)5.3、定位与装夹 (27)5.4、工序和工步内容 (27)5.5、机床与刀具 (27)5.6、切削用量 (27)6滚道的制作 (28)6.1、加工方法 (28)6.2、工序和工步内容 (29)6.3、定位与装夹 (29)6.4、机床与刀具 (29)6.5、铣削用量 (30)绪论课题来源第二届全国大学生工程训练综合能力竞赛湖北省预赛命题3,以重力势能与动能转换驱动的摆球“永动器”。
(机械制造行业)机械创新大赛作品

机械创新大赛作品1 助立椅参赛学校:华南理工大学参赛者:毕经元、龙志健、万明远,指导教师:张铁、李杞仪作品内容简介本作品是一张方便老年人或者腿脚不便的人站立的椅子。
主要是通过使用者上肢的运动来带动一面的动作,从而可以调整人的坐姿与重心,来减少下肢的运动来实现站立姿势。
本机构主要用到了平面连杆以及其它一些机械结构来实现椅面的调整,来带动使用者的行动。
并且如果使用者需要的话,在坐下来的时候也可以起到减少其下肢运动的作用。
主要创新点我们主要是考虑到老年人或者其他腿脚不方便的人群,在站起来的时候总是很费力;而且往往在坐下来的过程中也是一屁股就坐了下去。
为了改变这样的状况,我们将人站立过程中的手脚并用,该为手起到主要作用,方便特殊人群。
推广应用价值我们的社会对老年人的关爱渐见凸现,在这样的背景下,对老年人日常行动的关爱也就更为重要了。
而且对于特殊群体,比如下肢受伤,残疾等等的人群,我们的设计也可以助他们一臂之力。
方便了使用者日常行动,而且也减轻了子女或者看管人的看护负担。
这样的话,他们坐下就不愁再站起来了。
2 自动搀扶助步车参赛学校:青岛大学参赛者:王新刚、曹志强、郑虎阶、徐晟、孙海峰,指导教师:师忠秀、庞严英作品内容简介本产品主要应用于腿部残疾、腿部骨折处于恢复期的病人。
主要运用了自动检测和电器控制的原理;巧妙地将助步车和动力装置结合起来,实现了动力助步;并添加了单片机系统、光电检测装置以及继电器,可以自动检测病人的行动意图,并且实现了车随人动。
该车充分考虑了不同使用者的需要,设置了多种不同的工作模式;另外,本车增添了多处人性化设计及安全保护措施,结构简单、操作方便、产品的可靠性高;创新地利用支撑板代替双拐,这样可以减轻病人长时间拄拐带来的劳累;由于该车操作的方便性以及车身对人体的搀扶作用,病人可以独立使用,从而大大减轻家人及护士的负担。
基本技术指标:1、整车指标:速度0~0.5m/s连续可调;电机:DC12V、46rpm、P=15W。
全国大学生机械创新设计大赛参赛作品
全国大学生第一届机械创新设计大赛获奖作品展示全国一等奖北京化工齿动多功能平行口钳北京化工齿动多功能平行口钳北京化工齿动多功能平行口钳大连理工机械式自动节水水龙头第二炮兵工程学院军地两用全自动担架车第二炮兵工程学院军地两用全自动担架车东南大学自适应可翻转探测车东南大学自适应可翻转探测车东南大学自适应可翻转探测车东南大学自适应可翻转探测车福大节流阀型高楼逃生器福大节流阀型高楼逃生器福大节流阀型高楼逃生器国防科大行星轮式登月车国防科大行星轮式登月车国防科大行星轮式登月车国防科大行星轮式登月车哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机哈工并联与分布控制机哈工并联与分布控制机器人器人器人哈工并联与分布控制机器人哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工大微定位仿生机器人哈工大微定位仿生机器人海军工程大学摆式特种发动机天津大学爬杆喷漆机器人天津大学爬杆喷漆机器人中国农大菌液自动抽取喷涂机中国农大菌液自动抽取喷涂机重庆大学半球体螺旋沟槽数控研磨机重庆大学半球体螺旋沟槽数控研磨机重庆大学半球体螺旋沟槽数控研磨机全国二等奖北工大助力器北工大助力器北工大助力器长春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人大连理工蚯蚓爬行器大连理工蚯蚓爬行器东北大学圆柱凸轮数控铣削加工装置哈工程螺旋传动管道机器人海军工程大学舰船探测者海军工程大学舰船探测者华东理工易拉罐有偿回收装置/华南理工健身洗衣机华南农大气动式龙眼去核机华南农大气动式龙眼去核机南昌大学脉动式无极变速器上海交大可折叠崎岖表面自适应障碍小车上海交大可折叠崎岖表面自适应障碍小车西安电子科大新型球形机器人西安思源学院纱线卷绕防叠机西北工业大学方形区域喷灌龙头西南交大液压式无极变速器西南科大环卫保洁清扫自行车西南科大环卫保洁清扫自行车浙大虫虫小强浙大虫虫小强全国三等奖安徽工大新型立轴风力机北航仿生虫北航基于仿生的高适应性六足机器人北航爬杆爬管道年用机器人北科大自行车防盗锁成都大学球形机器人运动结构创新设计成都电机高专自适应上下非等高台阶小车东南大学智能机器鱼哈工大汽车同步照明灯湖大两足行走机器人华南农大机器昆虫步行机构华中科大仿生机械灵巧手昆明理工草坪剪草机兰州交大智能型全开式窗户辽宁工程技术大学爬杆爬绳机器人陕西科大揉搓式洗衣机陕西科多功能自走式清洁车四川工程职业技术学院异形齿轮泵天津大学双轴连动摩擦式翻谱台西华大学科氏加速度观察试验台新疆大学上下楼梯搬运机器人浙大仿生壁虎重庆工商大学楔铁式滚针超越离合器重庆工学院无机变速行星轮系操纵机构第二届机械创新设计大赛参赛作品展示螺旋电机爬楼梯机器人自行履带闭链两足步行机器人轻便按摩器新型三维仪自动清洁器旋转展示台仿生虫家用采棉机爬杆机器人。