西门子运动控制解决方案在得力士液压成型机上的应用-Siemens
浅谈西门子PLC在吹塑机控制系统上的应用
浅谈西门子PLC在吹塑机控制系统上的应用摘要:可编程控制器是一种数字运算的电子系统,专为工业环境下应用而设计。
它采用了可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计数、运算等操作指令,并通过数字式、模拟式的输入输出,控制各种类型的生产过程。
关键词:PLC技术吹塑机现场总线ASI一、PLC技术概述1、PLC的概念可编程控制器是一种数字运算的电子系统,专为工业环境下应用而设计。
它采用了可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计数、运算等操作指令,并通过数字式、模拟式的输入输出,控制各种类型的生产过程。
2、PLC技术的特点(1)硬件的可靠性高PLC专为在工业环境的恶劣条件下应用而设计·,一个设计良好的PLC能置于有很强的电噪声、电磁干扰、机械振动、极端温度和湿度很大的环境中。
(2)编程简单,使用方便PLC采用面向控制过程、面向问题的自然语言,容易掌握。
这种编程方式虽然在PLC内部增加了解释程序,增加了程序执行的时间,但对大多数机电控制设备来说,这是微不足道的。
(3)丰富的I/O接口模块由于工业控制机只是一个控制中枢,必须与各种工业现场的设备相连接,才能完成控制任务。
因此,PLC除了具有计算机的基本部件如CPU、存储器以外,还必须具有丰富的I/O接口模块。
PLC针对不同的工业现场信号(如交流或直流、开关量或模拟量、电压或电流、脉冲或电位、强电或弱电等),有相应的I/O模块与工业现场的器件或设备(如按钮、行程开关、接近开关、传感器及变送器、电磁线圈、电机启动器、控制阀等)直接连接。
(4)体积小、重量轻、功耗低一台体积很小的PLC具有相当于三个1.8m高的继电器柜的控制功能,一般节电可达50%以上。
PLC是专为工业控制而设计的专用计算机,特别是小型机,其结构紧凑、坚固、体积小巧,易于装入机械内部,是“机电一体化”较理想的控制设备。
二、西门子PLC1、西门子PLC的特点西门子PLC,具有多种不同的通信接口,并通过多种通信处理器来连接AS-I 总线接口和工业以太网总线系统,可通过编程软件Step 7的用户界面提供通信组态功能。
PLC在改造成型压力机上的应用

功 控制器, 辅以扩展模块。 该 ST’ 体积小、 能强、 速度快、 可靠性高, 具有较大的灵活 性和可扩展性。同时还具有抗干扰性强、 多种动态检测、 停电保护等各种功能。 我 们对各 主要 工序 的控 制点 进行 了精 确控 制。
$
改造效果
本项目以粉煤灰综合开发、利用为主
#
技术改造
我们选用西门子 7U — 6VWST’ 可编程
要目的。项目通过国家有关部、 委鉴定, 获 得填补国内空白的科技成果,并被建议全 国推广。成型压力机是项目中关键设备。 成型压力机经 ST’ 技术改造后, 我们对设 备进行了三个多月的生产运行考核。这期 间设备运行可靠,故障率很低。不仅有效 地保证了生产,更主要的是产品的外形尺 寸和承压能力等各项指标都得到了保 证。极 大地 提高 了产 品的 优质 率、 合格 率。因此, 我们在用 ST’ 技术改造设备的 同时,也为同类设备的生产制造闯出了一 条新路。 L 附梯图如图 6 M 参考文献 蔡丽斌,鲁放 * 可编程逻辑器件原理 华中理工大学出版社, 及应用 * 武汉: 全书 VXXX : ]^XV)) —RR* 四柱液压机精度 * 北 京: 国家标准局, VXRR Y +_ Y +_ 发布 ‘^QXV_ —R_* 液压机 安全技术条件 * 北京:中华人民共和国机械工业部, VXR_ Y +6 Y +R 发布
"
故障与分析
该套设备原设计采用老式的继电接触
控制方式。在设备试运行测试时,发现原 设计存在这样一些问题: 故障率高、 频繁停 机、 各工序衔接很差。对液压站的控制, 显 得既繁琐又不准确, 难以实现: ! 高压泵—
图&
成型压力机核心部分
图)
项目梯形图
2024年西门子杯运动控制

西门子运动控制器
01
02
03
运动控制器类型
包括SIMOTION
的控制器等,满足不同应
用场景需求。
控制功能
支持多种运动控制功能, 如速度控制、位置控制、 同步控制等,实现高精度 运动轨迹。
编程与调试
提供直观的编程界面和调 试工具,简化运动控制器 的配置和调试过程。
电机产品
提供多种类型电机,如1FK7、 1FT6等,满足不同负载和速度要
求。
传感器种类
包括旋转编码器、线性编码器、压 力传感器等,实现精确的位置和速 度反馈。
应用领域
广泛应用于机床、印刷机械、包装 机械等领域,提高生产效率和产品 质量。
04
西门子运动控制技术应用 案例
工业机器人应用案例
1 2 3
在智能制造、机器人等领域,运动控制技术的应用也越来越广泛,成为推动这些领 域发展的重要力量。
运动控制技术的发展水平直接影响着一个国家的工业自动化水平和制造业竞争力。
西门子在运动控制领域的贡献
西门子作为全球领先的工业自动化技术 供应商,在运动控制领域拥有深厚的技
术积累和丰富的产品线。
西门子提供的运动控制产品和解决方案 广泛应用于各种工业自动化领域,包括 机床、印刷机械、包装机械、纺织机械
物联网技术在运动控制领域的未来发展趋势
随着物联网技术的不断发展和应用,未来运动控制领域将 实现更加智能化、高效化和个性化的发展。
感谢您的观看
THANKS
等。
西门子还积极推动运动控制技术的创新 和发展,不断推出更加高效、智能的运 动控制产品和解决方案,为全球工业自
动化领域的发展做出了重要贡献。
02
运动控制基本原理
西门子Simotion运动控制系统在托辊管生产中的应用

分 4层 会依 据指 令 编码 进 行 选 择 放 置 位 置 ,其 工 艺 流 态 的指示 功能 。
程 图如 图 1所示 。
3 系统的软件设计
2 系统硬 件设计
生产管理系统 ’
以太网1『
, . .. . .. . . .
. — — — — . . 一
ቤተ መጻሕፍቲ ባይዱ
l SimotionD435 J 运动控制器
伺服系统功率单元
机服模电块动I l= f l伺服电动 伺服电 机模块 l I机模块
中托辊 管 在导 轨上 的移 动 采用伺 服 轴驱 动 ,以保证 管 料 中心 在 同一 水 平 位 置完 成定 长 送料 ,且 在 管 料 尾 部 有 一 气 压 驱
制 系 统 ,且 整个 控 制 系统 主要 分为 主 回路 和控制 回路 , 作用和功能 ,填写变量表确定主站与子站之间的通信 ,
切 割单 元 中管 料 的切 割 采 用 三 锯 片 环 切 ,通 过 变 频 器 控制 旋 转 和 伺 服 电动 机 实 现 进 给 运 动 ,在 切 割 时 切 割 卡 盘 先 卡 紧 物 料 ,然 后 锯 片 开 始 旋 转 、进 给 、切 割 ,最 后 松 开 物 料 ,回 到 初 始 位 置 等 待 下一 切 割指令 。
定位 装 置 及 料 仓 组 成 。实 现 的动作 过 程 是 依 据 指 令 指 定 位 置 进 行 接 料 ,然 后 回 到 翻
信依 靠 DRIVER-CLIQ来 完成 。其 中触 摸 屏 用 于显 示 系统 的工 作状 态 以及数 据 的输 入 输 出控 制 功 能 ;远 程 输入 输 出模块 用 于采 集光 电开 关 、限位 开 关 等传 感 器
西门子PLC在化工行业的应用与发展

西门子PLC在化工行业的应用与发展PLC将多种先进的技术集合起来,比如信息技术、数字化以及微电子等,从传统的接线转变为储存逻辑,其功能更加齐全,能量更大,能够满足化工行业中发展的实际需要,由于PLC具有很强的稳定性和精确性,因此能够提高化工行业的控制效果。
西门子PLC的电气控制技术,能够实现人机交互、集合网络与数字化等技术手段,实现运动控制、过程控制等,是当前化工行业主要的设备。
然后由于受到环境等方面因素的限制,西门子PLC在实际应用中也会遇到一定的制约,使其功能性发挥受到限制,文章就西门子PLC几种型号进行简要分析,阐述西门子PLC在化工行业中的应用。
标签:西门子PLC;化工行业;应用PLC又叫做可编程控制器,应用的时间比较久,应用范围也比较广阔,实现了数字化的控制系统,具有较高的工作效果。
PLC技术是一种电气控制设备,需要依据环境对设备进行配置,使其在化工行业中得到充分利用。
当前西门子PLC 控制系统在化工行业中占有十分重要的地位,相信未来西门子PLC会有很广阔的应用前景。
1 西门子PLC的几种型号介绍西门子PLC有着不同型号,每一种型号是存在差异的,主要分为S7-200、S7-300、S7-400等。
首先西门子S7-200,在实时情况下,其速度较快,通讯功能以及生产力能够达到较高的水平,模块化设计的一致性,能够有效使得低性能产品的创造以及扩展问题得到有效地解决。
西门子S7-200微型的S7-200可以作为独立的解决方案,并与其他控制器相结合进行使用。
由于S7-200的功能很强大,因此不管是单机运行,还是网络化运行都能够实现有效地控制。
S7-200能够提供4中基本型号以及8种CPU,以供使用。
[1]S7-200性能强大,能够实现通讯的开放、模块化,整体结构比较小巧,能够处理狭小空间中的事务。
S7-200的数据以及程序储存器容量较大,能够实时响应,对过程进行科学控制,使得产生质量水平的提升。
此外,其操作以及控制也比较快速准确,遇到一些对时间要求比较严格的流程,S7-200能够中断时间,进而有效控制。
SIMADYN-D控制系统在制氧机变频软起动中的应用

SIMADYN-D控制系统在制氧机变频软起动中的应用1 引言济钢总公司在新建2#2万m3制氧机工程中,制氧机的空压机采用瑞士苏尔寿压缩机,电机采用德国西门子无刷励磁同步电机,功率9500kw,电压10kv, 功率因数0.9(超前), 转速1500r/min, 采用西门子公司的simoverts 变频软起动装置对电机进行软起动控制,由s7-3 00 cpu315-2dp和et200s、op17、simotras hd、simeas p等组成的工作站完成各种保护、监控及内外部信号连接,起动过程的联锁及顺序逻辑控制,由西门子公司的7ve512自动同步单元完成同步并网过程。
2 制氧机工程的系统组成及工作原理制氧机工程系统采用了高-低-高式交-直-交电流型变频器供电和交流无换向器电机控制,整个软起动的控制由西门子公司的simadyn-d系统完成,其中一个pg16处理器+se48.1接口模块完成电网侧的整流器控制,一个ps16处理器+ts12触发模块+se21.2接口模块完成电机侧的逆变器控制,一个pm5处理器完成软起动过程中的顺序逻辑控制、速度给定和调节。
由于采用了旋转励磁机实现无刷励磁,专门由一个pm5处理器实现电机电压闭环完成软起动过程中励磁电流的给定值计算,以保证软起动过程中电机的气隙磁通基本保持不变,实现了对起动过程中定子电流电枢反应的补偿,从而即保证了晶闸管的换向裕量不变,又保证了最大的电机的过载能力,基本克服了采用电流型逆变器供电的自控同步电动机过载能力差的缺陷。
针对电机转速小于10%额定转速时,由于电机的反电势太低,无法安全实现负载换向的情况,系统采用了断续电流换向的方法,即当电机侧逆变器需要换向时,系统向电网侧整流器发出推逆变信号,将lci的电流强制拉到零,然后再触发电机侧逆变器待开通的另一对晶闸管,由于采用了特殊的整流侧脉冲组合逻辑,使得即使不用在直流平波电抗器并联释能晶闸管,也能够保证将lci电流快速拉到零,从而大大简化了电路结构和控制线路,为了进一步提高系统的可靠性,系统采用了由impag4+sav21组成的整流器触发和晶闸管监控单元,实现了高低压回路的光耦隔离,对误触发的有效监控保证了晶闸管触发的可靠性,避免了因晶闸管损坏或触发脉冲丢失等原因所造成的功率单元灾难。
西门子PLC控制系统在舞台机械行业中研究[论文]
![西门子PLC控制系统在舞台机械行业中研究[论文]](https://img.taocdn.com/s3/m/16adc9e181c758f5f61f6781.png)
西门子PLC控制系统在舞台机械行业中研究【摘要】西门子plc控制系统由于具有控制精度高、可靠性好、使用简便等优点,在舞台机械行业中已被广泛的应用。
下面简单介绍plc控制系统,以及其在舞台机械行业中的具体应用。
【关键词】 plc控制系统舞台机械行业应用舞台机械设备是主要用于舞台演出、服务于舞台美术和表演艺术的专用机械设备,它使五彩斑斓的文化艺术表演的表现形式更加新颖,更加迷人,更加完美。
这样使得演出的表现力与感染力大大增强,深受观众的喜爱,为演出的成功创造了有力的条件,舞台机械设备在现代化大型影剧院、综合性多功能会议厅、演播厅以及体育馆等表演场所中是必需的设备。
自从进入20世纪以来,随着先进的科学技术、计算机技术、信息技术的迅猛发展,机械化舞台的发展也进入了一个全新的时代,通过机—电—液技术的运用,使舞台机械设备具备以下优点:即运行越来越平稳、定位越来越准确、同步运行的精度相当高、噪音很低等,而且其运行速度和空间位置的变化越来越丰富,在操作时,也比较灵活、方便,灵活、快捷地实现了推、拉、升、降、转等各种功能的组合变化,使机械与艺术完美地结合起来。
传统的舞台机械设备控制系统都是利用继电器、接触器进行控制的,这种控制方式存在着很多不足:舞台机械设备的数量太多、控制系统电子元器件的数量也太多、接线比较复杂、电路的可靠性不高、控制系统经常出现问题,不方便维修,并且准确自动定位和管理的难度大大增加,不利于演出的成功。
而用plc开发的舞台吊杆控制系统,可以消除这些不足。
在实际的舞台机械控制系统中,当输入输出变量的逻辑管理与控制的数量比较多时,通过可编程控制器的使用可以取得良好的效果,能把设备的功能完美无缺地发挥出来,使产品的档次提高、内耗降低,也提高了舞台工作系统的可靠性与安全性。
舞台控制系统能够根据用户的实际需求,对plc程序进行修改,使联锁、互锁以及组合功能发生改变,对控制系统的控制功能与流程进行调整,对任何硬件与接线都不需要更改,使维修改造越来越简便,更加安全可靠,还可以节省成本,实现经济效益。
西门子运动控制及驱动产品应用实例
SIMOTION D 运动控制系统,用其独有而又灵活的编程软件,以及集成的多种标准 运动控制包,很方便的实现卷曲、飞剪、角同步以及 CAM 等复杂的工艺功能。与 SINAMICS S120 的无缝结合,将为工业领域提供完整的驱动解决方案。
在收集应用实例的过程中,得到了西门子各部门同事们及合作伙伴和许多客户的大 力支持,在此深表感谢!我们将尽全力为各个工业及基础建设领域提供最好的控制 及驱动解决方案!
4
运动控制及驱动产品应用实例
钢铁 Iron & Steel
一.首钢京唐托盘运输工程
项目简介 Project Introduction 首钢京唐 1580 热轧钢卷物流运输系统— 双排式托盘运输。双排式托盘运输方式 可以在热轧卷取区直接收卷,不需要天车 辅助。承载托盘在运输辊道上,根据需要 可自动直接被运送到冷轧原库、热轧成品 库、平整分卷的原料库等多个不同的目的 地,无论是转向还是改变运输高度都可灵 活实现。中间过程不需要人工干预。根据 各工序的实际情况,自动化系统还可自动
亮点及客户受益 Highlight and Benefits • S120 变频调速器提供了多种电机控制模式,既能采用矢量控制方式控制普通的交流 感应电机也能采用位置控制方式控制伺服电机,大大减少了所需控制单元种类,易 于维护、替换、备件 • 同一 CU320 控制单元下的各传动点之间能快速进行数据交换,可以高速实现负荷平 衡等控制功能 • 集成的 Profibus-DP 接口,容易和上位机连接,并且由于一个 CU320 集中控制多台 变频调速器,大大减少了 DP 从站的数量
PLC在液压传动系统中的应用

PLC在液压控制系统中的应用摘要:液压传动控制系统是用来控制液压动力原件(液压缸、液压马达)按照规定的要求动作。
该系统可以采用PLC来代替传统的继电器控制液压控制原件,从而实现对液压动力原件的控制,提高了液压控制系统的自动化和可靠性。
本文结合并以PLC(Program Logic Controller)在液压动力滑台中的应用,给出具体的实现方法,实践证明该方法可靠易行。
关键词:液压传动控制系统;PLC;液压动力阀台引言:液压传动是研究以液体为传动介质来实现各种机械传动与控制的技术,几乎应用于与机械运动相关的各个领域,已成为自动控制系统中的一个重要组成部分,采用液压技术的程度已成为衡量一个国家工业化水平的重要标志。
目前,我国的液压工业已成为影响机械工业和扩大机电产品国际交往的瓶颈产业,迅速改变这种状况,是我国液压技术研究和制造所面临的迫切任务,液压传动系统的控制经历了继电器控制、无触点逻辑控制、微型计算机控制以及现今的PLC(ProgramLogicController)控制等阶段。
PLC是以微电子技术为基础发展起来的新一代工业控制设备,是计算机技术与继电器逻辑控制概念有机结合的产物。
PLC作为新一代工业控制器,可靠性高、通用性、灵活性和抗干扰性强,能很方便的实现多种复杂的自动工作循环,使用简单,编程方便,还可实现控制的可视化。
1.液压传动系统的特点液压传动系统一般含有一个或几个基本液压回路,包括控制执行元件运动速度的速度控制回路,控制液压系统全部或局部压力的压力控制回路,用来控制执行元件(液压缸、液压马达)运动方式的换向回路等。
功能复杂的液压传动系统由多个不同功能的基本液压回路组成,这些回路组成的传动系统实现了机械设备所需的各种运动及控制功能。
通过对液压传动系统的工作过程和特点进行分析,液压传动系统控制的任何一个运动过程几乎都是按顺序步骤进行的。
工作部件主要为液压缸、液压马达,它们的工作过程按预定的逻辑关系实现,运动状态的改变靠转换信号。
基于西门子840Dsl系统的伺服泵运动控制实现
Science and Technology &Innovation ┃科技与创新2021年第24期·121·文章编号:2095-6835(2021)24-0121-02基于西门子840Dsl 系统的伺服泵运动控制实现谢浩炜,张贤军(中航西飞汉中航空零组件制造有限公司,陕西汉中723213)摘要:使用伺服泵电机驱动可提高控制精准度,减少能耗和噪声,但双向伺服泵技术控制运动难度大,和常规轴运动控制差异较大。
基于此,先分析了伺服泵运动原理,然后研究了基于西门子840Dsl 系统的伺服泵运动控制,在伺服运动运算上提出运动控制方案,实现对滑块位置、压紧力的全面控制。
关键词:西门子840Dsl 系统;伺服泵;运动控制;方案中图分类号:TG659文献标志码:ADOI :10.15913/ki.kjycx.2021.24.049数控机床在工业生产中发挥出重要价值,随着科技进步,机床加工精度和效率明显提高。
为满足多元化生产需要,以西门子840Dsl 系统为基础,应用伺服电机泵进行运动控制,通过使用双向伺服泵技术进行运动控制,能够提高运动控制的响应效率和精度,充分满足高标准的生产需要。
因此本文提出了运动控制方案,对于机床生产精度的提高具有突出价值。
1伺服泵运动原理基于西门子840Dsl 系统的伺服泵运动控制设计,是根据双向伺服泵驱动和液压系统原理完成的。
在滑块部件实际运动中,可以总结为以下五种工况:①快下。
滑块向下快速定位到达目标位置,运动时,下腔支撑失效,伺服泵提供滑块支撑力;泵反转时,滑块失去支撑落下;泵抽取油液补充上腔,由于上腔截面较下腔大,需要对优良进行补充。
②保压。
保持压力,将板料压紧,Y2阀通电后,伺服泵出现反转,供油给上腔,在液压系统和补液量保证平衡后,电机进入堵转,形成上腔压力[1]。
③工进。
向下带载慢速运动,Y2阀通电,伺服泵发生反转,供油给上腔;在上腔压力超过下腔压力后,导通支撑阀,让下腔油液回流至流油箱中,滑块发生向下运动。
基于PLC的液压控制系统设计与实现
基于PLC的液压控制系统设计与实现摘要:随着现代科技技术的不断进步,促使中国工业领域也逐渐转向自动化控制的方向发展。
PLC作为新兴的工业控制器,其不仅具备较高的可靠性,同时还拥有目前工业领域中较先进的技术,PLC控制系统在工业领域中得到了广泛的推广与应用。
PLC控制系统作为目前较为先进技术,其可以充分取代传统的电力控制系统,以便可以充分确保达到准确度、控制、可靠性较高的标准,同时在确保工业生产效率与自动化生产质量的同时,可以充分增加系统的实用性,从根本上降低系统出现故障的概率。
关键词:PLC;液压系统;PLC控制系统引言液压系统是一个非常典型的非线性系统,且带有惯性过程。
针对传统液压控制系统的不足,为使其拥有更好的性能和人性化操作界面,构建和介绍了基于PLC的液压控制系统,该系统经实践证明具备可使用性。
一、液压系统硬件结构及工作原理常规的液压控制系统只拥有单个液压缸,但因为压力表的里程范围较大,通常情况下单个液压缸的里程范围为0.6~60MPa,促使压力表的回弹性能结构之间的差距也较大。
目前针对压力表的中高里程(20~60MPa)展开检定时,其可以充分满足生产的基本要求。
但对于压力表的而言,例如:20MPa~10MPa以下的量程展开检定的过程中,系统的控制极易出现超调的情况,通过升级软件的方式也无法将这项问题从根本上解决掉,因此在实际研究液压控制系统的硬件时,可选择在原有的液压缸上增加一个小型的压力缸,并将其通过控制压力装置连接至系统中,将其作为具备辅助功能的压力源,当运行液压控制系统的过程中两种液压缸之间可以相互协作,共同完成实际生产控制工作。
在实际试验的过程中,可以将传统液压缸与小型液压缸的截面比例控制在4∶1,同时还需要将其有效里程范围控制在250mm 之内,在运行控制系统的过程中,当小型液压缸的压力值可以达到1~2MPa时,其与实际压力表中里程的范围之间差距较大,不可以满足实际需求。
所以根据实际结果可知,在实际运行控制系统的过程中,需要将大型液压缸作为控制的主要环节,将小型液压缸作为调节压力的环节。
西门子S7-200PLC在315T液压机上的应用
西门子S7-200PLC在315T液压机上的应用摘要针对EQ153车门包边液压机设备老化、控制陈旧、故障率高、维修困难等问题,提出了采用目前最新型的适用于中小系统的可编程控制技术对控制系统进行改造的方案,取代原老式陈旧的继电器控制方式。
并着重论述了西门子S7-200 PLC 的选型、硬件组态过程及软件设计方法,突出了应用S7-200新型可编程控制器解决各种生产实际问提的思路和方法。
通过对S7-200PLC的成功运用,改造取得了良好的使用效果和经济效益,具有普遍的推广价值。
关键词:液压机,PLC改造,精度控制,应用Simens S7-200PLC on 315T hydraulic press's application ABSTRACTT he hydraulic press equipment gets older, the control in view of the EQ153 vehicle bribe given to a gatekeeper nearby to be obsolete, the failure rate is high, questions and so on service difficulty, proposed uses newest being suitable to make the transformation at present in the small system's programmable control technology to the control system the plan, substitutes for the original old style obsolete black-white control way. And elaborated the Simens S7-200 PLC shaping, the hardware configuration process and the software design method emphatically, highlighted has solved each kind of production using the S7-200 new programmable controller actual to ask raised mentality and method. Through to the S7-200PLC successutilization, the transformation has made the good use progress and the economic efficiency, has the universal promoted value。
西门子Simotion运动控制器在普通卧式镗床中的应用

计 了 四种 加工 循环 : 面循 环 、 铣 阵列孔 加工循 环 、 圆周 孔加 工循 环 、 自定义孔 系加工循 环 。下 面 以阵列孔 加
r 4Ax s Ge r to 1 6 iX aRai 0
_
工循 环为例作简单说 明。 阵列孔加工循环 可以对 规则阵列状 排布孔系进 行 钻孔 、 镗孔 、 L 攻丝等不 同加工操作 , 功能类似 于 啄孑 、 其 数控 系统 中的固定 加 工循 环 , 对 于规则 排布 背景 下 但 的某 些特别点 , 以用更灵 活 的方式进 行 处理 ( : 可 例 修
数控 ・ 数显——西 门子 S t n运动控制器在普通卧式镗床中的应用 i i moo
机床电器 2 1 . 023
西 门子 Sm t n运 动控 制器 在 普 通 卧式镗 床 中的应 用 i oo i
邓开楠 , 宏岩 。 高 徐一楠 ( 阳机 床股份 有 限公 司中捷钻 镗床 厂 ,112 沈 104 )
i o m o o i o a r ng m a hi e nc m n h r z nt lbo i c n
DENG i—n n.GAO n Ka a Ho g—y n.XU a Yi—I n l a
( h n agMahn ol o ,t hn S eyn c ieT o C . LdC ia—C ehs v ka rl gadB r gMahn rs 10 4 ) zc ol a i D ln n o n c ieWok ,1 12 o n ii i
Ab t a t T i p p rp e e t t e a p iain o ime s S mo in mo e n o t l r n ta i o a o z n a b r g sr c : h s a e r s n s h p l t fS e n i t v me tc n r l ' i rd t n lh r o tl o n c o o oes i i i ma h n .I h a eo c a im r me o k i o h n e ,t e s i d e u e c i e n te c s fme h n s fa w r s n t a g d h pn l s s ̄e u n y c n e e o tolrmo ua in i — c q e c o v  ̄ rc n rl d lt n e o s a ft d t n c a ia e rv lc t d lt n te f e x su e h ls d lo e v e h oo y o t e ma hn t d o a i o a me h nc g a eo i mo u a i h e d a i s st e co e o p s ro t c n lg .S h c i e e r i l l y o c n r aie e a t on —t a e z x c i t o— p i tpn on i g l p on i p i t ,ma y k n s o u o t r c s i g c ce f n t n T r u h t e a p ia in n n i d fa tmai p o e s y l u ci . h o g h p l t c n o c o a v n e t n c n r ltc n l g ,t e ta i o a oio t lb rn c i e i u d t d a hg r cso ,lw o e o — d a c d mo i o to e h oo o y h r d t n lh rz n a o g ma hn s p a e ih p e ii n o p w r c n i i s mp i n af uo t c i e t o. u t ,h l —a tma i ma h n o 1 o c Ke r s S mo in;mo e n o to ;i r v me t fh r o tlb r g ma h n y wo d : i t o v me t n r l mp o e n o z na o i c i e c o i n
PLC技术在机械压力机中的应用
PLC技术在机械压力机中的应用摘要:随着科学技术的不断进步,从事电气自动化的工作人员逐渐将注意力转移到智能化控制装置上。
传统的控制技术使用继电器接触器控制机械设备,曾在机械化生产中发挥了重要的作用,但它的缺点也是显而易见的,如不能实现高度的自动化、信息化综合操作。
与此同时,近年来随着科学技术水平的不断提高,PCL技术得到了极大地发展,PLC的功能不断完善并被广泛应用于机械电气控制装置中。
毋庸置疑,若要充分发挥PLC的技术优势,针对机械电气控制装置对PLC技术的有效应用进行充分分析和探究就显得尤其关键。
关键词:PLC技术;电气工程;自动化引言PLC是基于工业产生的一种现代电子信息设备,它通过一系列的数字化操作对工业生产中的设备进行控制,同时具有大容量和强大的运算功能,能控制不同类型的机器操作。
PLC技术可以根据用户的需求对逻辑控制器进行编辑,主要通过用户的指令进行预算逻辑,内存对相应的程序进行存储。
在PLC技术对整个系统进行扫描之后,相应的信号传输到需要执行的机构,最后实现整个程序的运算供给。
1PLC技术概述PLC技术即可编程控制器,该控制器的应用可以将机械设备控制效率显著提高,组成该控制器的主要结构包括电源、中央处理器、编辑器、存储器、输出设备等。
不同结构的作用也存在很大的差异,其中PLC控制器的最核心的部分也是该技术的中枢为CPU,即中央处理器,相关数据信息、设备运行状态等可以通过扫描进入中央处理器中,由处理器进行处理后通过编程器接收存储,中央处理器负责诊断和分析PC运行、指令执行情况。
存储器主要负责调动和管理系统程序、子程序、模块系统,可以动态存储产生的数据、参数,编程器是数据存储的基础,如果编程器无法输入信息,那么数据管理和存储将无从谈起。
输入输出装置(I/O)连接于中央处理器和外部设备,主要负责数据信息的输入和输出。
编程器作为整个控制系统中非常关键的内容,主要应用于功能开发、系统检查维护等,显示器可以展示内部相关参数信息,为控制人员提供直观的参数,从而大大监视、检查、编辑、控制程序的目的。
SIEMENS 电动液压阀门执行器 说明书
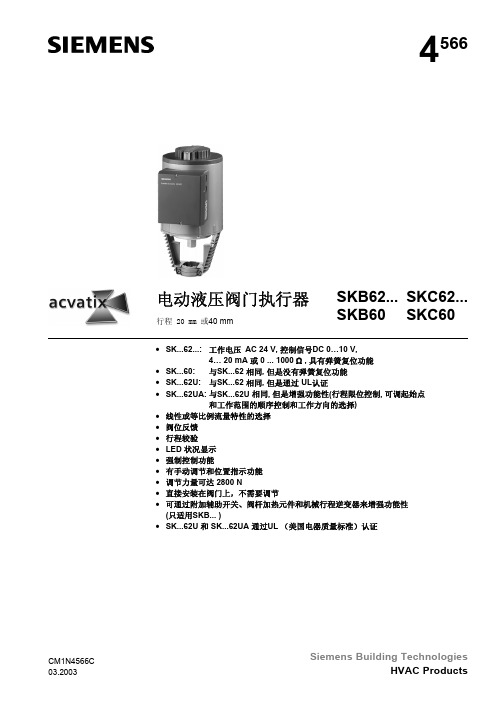
25 ... 150 mm
VXF40... (法兰)
15 ... 150 mm
VXF41... (法兰)
15 ... 150 mm
VXF61... (法兰)
15 和 25 mm
PN
6 bar 10 bar 16 bar 16 bar 16 bar 25 bar 40 bar
6 bar 10 bar 16 bar 16 bar 40 bar
和工作范围的顺序控制和工作方向的选择) • 线性或等比例流量特性的选择 • 阀位反馈 • 行程较验 • LED 状况显示 • 强制控制功能 • 有手动调节和位置指示功能 • 调节力量可达 2800 N • 直接安装在阀门上,不需要调节 • 可通过附加辅助开关、阀杆加热元件和机械行程逆变器来增强功能性
? G0
Fully open Fully closed
Input override
? 0 ...1000 Ω
0 ...100 %
(Signal priority)
Pump Solenoid
Y
DC 0 ...10 V or
0 ...100 %
Input
Valve Seat Detection
Stroke
型号 SKB... 行程 20 mm 标准版
功能增强版
SKC... 行程 40 mm 标准版
功能增强版
2/13 Siemens Building Technologies HVAC Products
型号
工作电压
SKB62 SKB62U *
AC 24 V
SKB60 SKB62UA * AC 24 V
控制 (控制信号)
– 控制信号的可选性 (DC 0 ... 10 V / 4 ... 20 mA / 0 ... 1000 Ω) – 流量特性的可选性 (等比例 / 线性) – 阀位反馈 – 行程较验 – LED 状态显示 – 通过端子Z 的强制控制 • SK...62UA 功能增强版: – 行程限位控制 – 可调起始点和工作范围的顺序控制 – 工作方向的选择 (正向动作 /反向动作) • 有辅助开关的安装空间 • 如果需要可使用阀杆加热元件 • 如果需要可安装机械行程逆变器 (只适用SKB...) • SK...62U 和 SK...62UA 执行器通过UL (美国电器质量标准)认证
SIEMENS simovert masterdrives 说明书

SIMOVERT MASTERDRIVES使用大全(上册)矢量控制版本: AE订货号: 6SE7085-0QX60此使用说明书仅适用于装置软件版本V3.3。
我们保留更改功能、技术数据、标准、附图及参数的权利。
西门子电气传动有限公司(SEDL)目前仅提供下列产品:– 3AC 380V~480V MASTERDRIVES 6SE70产品及相应选件– 3AC 380V~480V MASTERDRIVES 6SE71产品及相应选件– 3AC 500V~600V MASTERDRIVES 6SE71产品及相应选件– 3AC 660V~690V MASTERDRIVES 6SE71产品及相应选件用户如需要其它电压等级的产品或有特殊要求,请与当地西门子公司办公室联系。
未经授权复制,传播或使用本文件及其内容是不允许的。
违犯者将负赔偿责任,所有权力,包括专利权授予的权力及应用型号或设计的注册权将被保留。
我们已经校对了本出版物的内容,他与其中所介绍硬件及软件内容是一致的。
但是,仍然有可能存在差异,因此,我们不能保证他们完全相同。
本出版物所提供的资料将定期回顾,并且任何必要的更正将在接下来的发行中执行。
欢迎在任何时间提出改进建议。
SIMOVERT ® 为Siemens 注册商标 西门子电气传动有限公司版权所有不得翻印SIMOVERT MASTERDRIVES 矢量控制使用大全版本AE6SE7085-0QX6010.2001目 录Siemens Electrical Drives Ltd. 6SE7085-0QX60 (AE 版)0-1SIMOVERT MASTERDRIVES 矢量控制使用大全目 录(上 册)1系统说明………………………………………………………………………1-11.1概 述………………………………………………………………………………………1-11.2系统说明……………………………………………………………………………………1-21.3结构尺寸……………………………………………………………………………………1-31.4通 讯………………………………………………………………………………………1-42配置和接线举例………………………………………………………………2-12.1增强书本型装置……………………………………………………………………………2-12.1.1单轴传动……………………………………………………………………………………2-12.1.2一直到3根轴的多轴传动…………………………………………………………………2-12.1.3多轴传动……………………………………………………………………………………2-22.1.4配置和接线举例(增强书本型)……………………………………………………………2-62.2书本型和装机装柜型装置…………………………………………………………………2-92.2.1水冷装置……………………………………………………………………………………2-92.2.2单台装置……………………………………………………………………………………2-92.2.3用整流/回馈单元的配置举例…………………………………………………………2-122.2.4有关配置例子的解释 (书本型和装机装柜型装置)……………………………………2-132.3电机接线举例……………………………………………………………………………2-162.3.1屏蔽电缆交点所要求的EMC 以满足EMC 限值……………………………………2-162.3.2非屏蔽电缆………………………………………………………………………………2-182.4“安全停车”功能………………………………………………………………………2-193依照EMC 导则进行传动装置设计的说明……………………………………3-13.1前 言………………………………………………………………………………………3-13.2EMC 原理…………………………………………………………………………………3-23.2.1什么是EMC?………………………………………………………………………………3-23.2.2噪声发射和抗扰度…………………………………………………………………………3-23.2.3工业和家庭应用……………………………………………………………………………3-33.2.4不接地系统…………………………………………………………………………………3-33.3变频器及其电磁兼容性……………………………………………………………………3-4目录10.20013.3.1变频器作为噪声源…………………………………………………………………………3-4 3.3.2变频器作为噪声接受器……………………………………………………………………3-73.4EMC设计…………………………………………………………………………………3-8 3.4.1区域原则…………………………………………………………………………………3-10 3.4.2滤波器和耦合元件的使用………………………………………………………………3-123.5依照EMC导则进行传动系统的设计…………………………………………………3-13 3.5.1基本的EMC规则………………………………………………………………………3-13 3.5.2例 子……………………………………………………………………………………3-193.6SIMOVERT MASTERDRIVES,无线电干扰抑制滤波器和进线电抗器的配合……3-24 3.7使用的标准………………………………………………………………………………3-24 4功能块和参数…………………………………………………………………4-14.1功能块………………………………………………………………………………………4-1 4.2连接器和开关量连接器……………………………………………………………………4-2 4.3参数………………………………………………………………………………………4-4 4.4连接到功能块(BICO系统)………………………………………………………………4-8 5参数设置………………………………………………………………………5-15.1参数菜单……………………………………………………………………………………5-1 5.2参数的可变性………………………………………………………………………………5-6 5.3通过PMU进行参数输入…………………………………………………………………5-75.4通过OP1S进行参数输入………………………………………………………………5-12 5.4.1概述……………………………………………………………………………………5-12 5.4.2接线,启动………………………………………………………………………………5-14 5.4.2.1接线……………………………………………………………………………………5-14 5.4.2.2启动……………………………………………………………………………………5-15 5.4.3操作面板…………………………………………………………………………………5-17 5.4.3.1面板按键…………………………………………………………………………………5-17 5.4.3.2工作显示…………………………………………………………………………………5-18 5.4.3.3基本菜单…………………………………………………………………………………5-19 5.4.3.4从站ID…………………………………………………………………………………5-20 5.4.3.5OP:读取………………………………………………………………………………5-21 5.4.3.6OP:写入………………………………………………………………………………5-220-26SE7085-0QX60 (AE版)Siemens Electrical Drives Ltd.矢量控制使用大全SIMOVERT MASTERDRIVES10.2001目 录Siemens Electrical Drives Ltd. 6SE7085-0QX60 (AE 版)0-3SIMOVERT MASTERDRIVES 矢量控制使用大全5.4.3.7消去数据…………………………………………………………………………………5-235.4.3.8菜单选择…………………………………………………………………………………5-245.4.3.9通过OP1S 发出指令……………………………………………………………………5-305.4.4总线操作…………………………………………………………………………………5-315.4.4.1配置从动装置……………………………………………………………………………5-315.4.4.2更改从动装置……………………………………………………………………………5-325.4.5技术数据…………………………………………………………………………………5-325.5用SIMOVIS/DRIVEMONITOR 的参数输入…………………………………………5-335.5.1安装和接线………………………………………………………………………………5-335.5.1.1安 装……………………………………………………………………………………5-335.5.1.2接 线……………………………………………………………………………………5-335.5.2总线配置(SIMOVIS)……………………………………………………………………5-345.5.2.1建立一个项目……………………………………………………………………………5-345.5.2.2设定接口…………………………………………………………………………………5-355.5.2.3选择一台装置……………………………………………………………………………5-365.5.2.4检验接线…………………………………………………………………………………5-385.5.3传动系统配置DriveMonitor ……………………………………………………………5-395.5.3.1设定接口…………………………………………………………………………………5-395.5.3.2传动系统设定……………………………………………………………………………5-405.5.4参数设置…………………………………………………………………………………5-435.5.4.1呼叫传动系统窗口(SIMOVIS)…………………………………………………………5-435.5.4.2传动系统窗口……………………………………………………………………………5-435.5.4.3.工作模式…………………………………………………………………………………5-455.5.4.4参数设置的选择(菜单参数)……………………………………………………………5-465.5.4.5参数表的结构,用SIMOVIS/DriveMonitor 的参数设置……………………………5-495.5.5带USS 的运行…………………………………………………………………………5-505.5.5.1要 求……………………………………………………………………………………5-505.5.5.2工作功能…………………………………………………………………………………5-515.5.6维护功能…………………………………………………………………………………5-535.5.6.1读取/写入………………………………………………………………………………5-535.5.6.2脚本文件…………………………………………………………………………………5-545.5.6.3跟 踪……………………………………………………………………………………5-605.5.6.4诊断菜单…………………………………………………………………………………5-675.5.6.5简捷启动菜单……………………………………………………………………………5-685.5.6.6学习一个数据库…………………………………………………………………………5-72目录10.20016参数设置步骤…………………………………………………………………6-1 6.1参数复位到工厂设置………………………………………………………………………6-36.2简单应用的参数设置步骤…………………………………………………………………6-9 6.2.1简单应用的参数设置,P060=3 (用参数模块进行参数设置)…………………………6-9 6.2.2用户设置参数……………………………………………………………………………6-40 6.2.3用已有的参数文件进行参数设置(写入P060=6)……………………………………6-41 6.2.4用运行脚本文件方法进行参数设置……………………………………………………6-436.3专家应用的参数设置……………………………………………………………………6-44 6.3.1功率部分定义……………………………………………………………………………6-44 6.3.1.1增强书本型变频器装置一览表…………………………………………………………6-45 6.3.1.2增强书本型逆变器装置一览表…………………………………………………………6-45 6.3.1.3书本型变频器装置一览表………………………………………………………………6-46 6.3.1.4书本型逆变器装置一览表………………………………………………………………6-47 6.3.1.5装机装柜型变频器装置一览表…………………………………………………………6-48 6.3.1.6装机装柜型逆变器装置一览表…………………………………………………………6-50 6.3.2电子板配置………………………………………………………………………………6-53 6.3.3系统设置…………………………………………………………………………………6-576.4参数设置的注意事项……………………………………………………………………6-65 6.4.1系统设定应遵照工艺过程的边界条件…………………………………………………6-70 6.4.2功能选择参数(P052) VC (从前)的改变………………………………………………6-757功能…………………………………………………………………………7-17.1基本功能……………………………………………………………………………………7-1 7.1.1时隙………………………………………………………………………………………7-1 7.1.1.1时隙T2~T20………………………………………………………………………………7-1 7.1.1.2处理顺序……………………………………………………………………………………7-2 7.1.1.3功能块时隙的确定…………………………………………………………………………7-3 7.1.2功能块的处理顺序…………………………………………………………………………7-4 7.1.2.1时间监控……………………………………………………………………………………7-4 7.1.2.2时间响应的影响……………………………………………………………………………7-57.2变频器功能…………………………………………………………………………………7-6 7.2.1自动再启动(WEA)…………………………………………………………………………7-6 7.2.2动能缓冲(KIB)(功能图600)………………………………………………………………7-8 7.2.3柔性响应(FLR)(功能图605)……………………………………………………………7-10 7.2.4Vdmax闭环控制(功能图610)…………………………………………………………7-130-46SE7085-0QX60 (AE版)Siemens Electrical Drives Ltd.矢量控制使用大全SIMOVERT MASTERDRIVES10.2001目 录Siemens Electrical Drives Ltd. 6SE7085-0QX60 (AE 版)0-5SIMOVERT MASTERDRIVES 矢量控制使用大全7.2.5直流制动(DC 制动) (功能图615)………………………………………………………7-147.2.6捕捉再启动(功能图620)………………………………………………………………7-157.2.6.1无测速机(有搜索)的捕捉再启动(P130=0)……………………………………………7-157.2.6.2用测速机捕捉再启动(P130<>0)………………………………………………………7-177.2.6.3捕捉再启动功能的参数设置……………………………………………………………7-187.2.7温度适配器(功能图430)………………………………………………………………7-197.2.8电机自动参数设置和辨识的功能………………………………………………………7-237.2.8.1自动参数设置(P115=1)…………………………………………………………………7-237.2.8.2在零速时的电机辨识(P115=2)…………………………………………………………7-257.2.8.3完全的电机辨识(P115=3)………………………………………………………………7-287.2.8.4空载测量(P115=4)………………………………………………………………………7-317.2.8.5n/f 调节器优化(P115=5)………………………………………………………………7-327.2.8.6自测试(P115=6)…………………………………………………………………………7-357.2.8.7测速装置测试(P115=7)…………………………………………………………………7-357.3特殊功能…………………………………………………………………………………7-377.3.1装入固化软件……………………………………………………………………………7-377.4用于电梯和提升机功能…………………………………………………………………7-397.4.1激活此功能………………………………………………………………………………7-397.4.2技术数据差异……………………………………………………………………………7-397.4.3接近延时和短程运行……………………………………………………………………7-417.4.4起始提升(用于提升机)…………………………………………………………………7-417.4.5紧急状态运行……………………………………………………………………………7-427.4.6用固定设定值作给定值…………………………………………………………………7-437.4.7参考量的更改……………………………………………………………………………7-447.4.8工厂设定后改变的参数表………………………………………………………………7-458通 讯…………………………………………………………………………8-18.1通用串行接口(USS)……………………………………………………………………8.1-18.1.1协议说明和总线结构……………………………………………………………………8.1-28.1.1.1协议说明…………………………………………………………………………………8.1-28.1.1.2总线结构…………………………………………………………………………………8.1-78.1.2有用数据结构…………………………………………………………………………8.1-108.1.2.1有用数据块的一般结构………………………………………………………………8.1-108.1.2.2PKW 区域……………………………………………………………………………8.1-118.1.2.3过程数据区(PZD)……………………………………………………………………8.1-198.1.3接口综述………………………………………………………………………………8.1-20目录10.20018.1.4连接…………………………………………………………………………………8.1-23 8.1.4.1总线电缆连接…………………………………………………………………………8.1-23 8.1.4.2装配总线电缆…………………………………………………………………………8.1-24 8.1.4.3EMC措施……………………………………………………………………………8.1-25 8.1.4.4总线终端,USS协议………………………………………………………………8.1-28 8.1.5启动…………………………………………………………………………………8.1-31 8.1.5.1USS协议的参数化(第1步)…………………………………………………………8.1-32 8.1.5.2参数化使能与过程数据内部连接的参数化(第2步)………………………………8.1-368.2PROFIBUS………………………………………………………………………………8.2-1 8.2.1CBP通讯板产品说明…………………………………………………………………8.2-1 8.2.2关于PROFIBUS-DP CBP的功能说明………………………………………………8.2-3 8.2.2.1周期性的数据传输………………………………………………………………………8.2-5 8.2.2.2非周期型数据传送……………………………………………………………………8.2-10 8.2.2.3非周期第1类主站,自动化(PLC)…………………………………………………8.2-12 8.2.2.4非周期第2类主站,配置(Drive ES)………………………………………………8.2-16 8.2.2.5非周期第2类主站,操作员控制(SIMATIC OP)…………………………………8.2-17 8.2.3通过PROFIBUS处理参数的原理…………………………………………………8.2-18 8.2.4PROFldrive V3: 用数据块47访问周期型参数……………………………………8.2-25 8.2.4.1到PROFldrive V2和V3的参数任务间的比较……………………………………8.2-27 8.2.4.2“请求参数值”例子,单个…………………………………………………………8.2-28 8.2.4.3“改变参数值”例子,单个…………………………………………………………8.2-29 8.2.4.4“请求参数值”例子,多于1个数组元素…………………………………………8.2-30 8.2.4.5“改变参数值”例子,多于1个数组元素…………………………………………8.2-31 8.2.4.6“请求参数值”例子,多参数………………………………………………………8.2-32 8.2.4.7“改变参数值”例子,多参数………………………………………………………8.2-34 8.2.4.8请求说明,个别的……………………………………………………………………8.2-36 8.2.4.9请求说明,总的………………………………………………………………………8.2-37 8.2.4.10请求正文,个别的……………………………………………………………………8.2-38 8.2.5安装方法/CBP槽……………………………………………………………………8.2-39 8.2.5.1在MC增强书本型装置中的CBP安装槽…………………………………………8.2-39 8.2.5.2CU板的功能类型为MC (CUMC)和VC (CUVC)的书本型和装机装柜型装置中的CBP槽……………………………………………8.2-40 8.2.5.3CU板的功能类型为FC (CU1),VC (CU2)或SC (CU3)的书本型和装机装柜型装置中的CBP槽……………………………………………8.2-42 8.2.6连接CBP到PROFIBUS……………………………………………………………8.2-43 8.2.6.1插头连接器X448的分配……………………………………………………………8.2-43 8.2.6.2通过RS485总线连接系统连接的总线电缆………………………………………8.2-430-66SE7085-0QX60 (AE版)Siemens Electrical Drives Ltd.矢量控制使用大全SIMOVERT MASTERDRIVES10.2001目 录Siemens Electrical Drives Ltd. 6SE7085-0QX60 (AE 版)0-7SIMOVERT MASTERDRIVES 矢量控制使用大全8.2.6.3采用光缆系统连接总线电缆…………………………………………………………8.2-478.2.6.4总线电缆的屏蔽/EMC 措施…………………………………………………………8.2-498.2.7启动CBP ……………………………………………………………………………8.2-528.2.7.1基本参数化……………………………………………………………………………8.2-528.2.7.2装置内的过程数据互连………………………………………………………………8.2-578.2.7.3通过标准报文的过程数据互连………………………………………………………8.2-648.2.7.4过程数据监视…………………………………………………………………………8.2-668.2.8设定PROFIBUS - DP 主站(第1类)………………………………………………8.2-688.2.8.1CBP 与SIMATIC S5一起运行……………………………………………………8.2-708.2.8.2CBP 与SIMATIC S7一起运行……………………………………………………8.2-728.2.8.3CBP 与非西门子产品一起运行……………………………………………………8.2-748.2.8.4作为SIMATIC S7扩展功能的CBP2的运行………………………………………8.2-758.2.8.5用 SIMATIC S7,CBP2运行在交叉通讯…………………………………………8.2-768.2.8.6带1个SIMATIC S7,带时钟同步运行的CBP2…………………………………8.2-788.2.8.7按PROFldrive V3,在1个PROFIBUS 主站上,带时钟同步的CBP2………8.2-788.2.9MASTERDRIVES 作为 PROFIdrive V3-Slave …………………………………8.2-788.2.10诊断与查找故障………………………………………………………………………8.2-798.2.10.1硬件诊断的可能性的评价……………………………………………………………8.2-798.2.10.2基本装置的故障和报警显示…………………………………………………………8.2-818.2.10.3CBP 诊断参数的评价………………………………………………………………8.2-848.2.10.4CBP 诊断通道的信息含义…………………………………………………………8.2-878.2.10.5操作人员的其它诊断方法……………………………………………………………8.2-918.2.10.6CBP2诊断参数………………………………………………………………………8.2-978.2.10.7操作人员专用CBP2诊断……………………………………………………………8.2-1008.2.11附 录…………………………………………………………………………………8.2-1038.3SIMOLINK ………………………………………………………………………………8.3-18.3.1基本原理…………………………………………………………………………………8.3-18.3.2装置对装置功能…………………………………………………………………………8.3-58.3.3装置对装置功能的应用…………………………………………………………………8.3-68.3.4装置对装置功能的组成…………………………………………………………………8.3-88.3.5装置对装置功能的参数化……………………………………………………………8.3-108.3.6装置对装置功能的诊断………………………………………………………………8.3-148.3.7通过总线循环时间的控制回路的同步(仅用于MC)………………………………8.3-168.3.8同步诊断(仅用于MC)………………………………………………………………8.3-188.3.9同步源的切换(仅MC)………………………………………………………………8.3-188.3.10专用数据和应用标志…………………………………………………………………8.3-20目录10.20018.3.11配置(装置对装置功能示例)…………………………………………………………8.3-21 8.3.12主/从功能……………………………………………………………………………8.3-25 8.3.13主/从功能应用………………………………………………………………………8.3-268.4CBC通讯板……………………………………………………………………………8.4-1 8.4.1产品介绍…………………………………………………………………………………8.4-1 8.4.2安装方法/CBC槽………………………………………………………………………8.4-4 8.4.2.1MC增强书本型装置中CBC的安装位置……………………………………………8.4-4 8.4.2.2功能类型为MC (CUMC)和VC (CUVC)的书本型和装机装柜型装置CBC的安装位置……………………………………………………8.4-5 8.4.2.3CU板的功能类型为FC (CU1),VC (CU2)或SC (CU3)的书本型和装机装柜型装置CBC的安装位置……………………………………………………8.4-6 8.4.2.4VC增强书本型装置中CBC的安装位置………………………………………………8.4-7 8.4.3连接……………………………………………………………………………………8.4-8 8.4.3.1总线电缆的连接…………………………………………………………………………8.4-9 8.4.3.2EMC措施……………………………………………………………………………8.4-10 8.4.3.3CAN总线的总线终端(跨接器S1.2)………………………………………………8.4-13 8.4.3.4接地(跨接器S1.1)……………………………………………………………………8.4-13 8.4.3.5有跨接器排S1的接口X458/X459…………………………………………………8.4-14 8.4.3.6推荐线路………………………………………………………………………………8.4-15 8.4.4CAN总线上的数据传送……………………………………………………………8.4-16 8.4.4.1概述…………………………………………………………………………………8.4-16 8.4.4.2参数区(PKW)…………………………………………………………………………8.4-17 8.4.4.3过程数据区(PZD)……………………………………………………………………8.4-24 8.4.5CBC启动……………………………………………………………………………8.4-31 8.4.5.1装置的基本参数化……………………………………………………………………8.4-32 8.4.5.2装置中过程数据的软连接……………………………………………………………8.4-45 8.4.6诊断和故障查找………………………………………………………………………8.4-52 8.4.6.1硬件诊断的评价………………………………………………………………………8.4-52 8.4.6.2基本装置上的故障显示和报警………………………………………………………8.4-54 8.4.6.3CBC诊断参数的评价………………………………………………………………8.4-56 8.4.6.4CBC诊断含义………………………………………………………………………8.4-57 8.4.7附录…………………………………………………………………………………8.4-60(第9至16章见下册)0-86SE7085-0QX60 (AE版)Siemens Electrical Drives Ltd.11.2000定义和警告1定义和警告合格人员为了理解本手册和产品上的警示标记,“合格人员”是指熟悉本产品的装配、安装、启动、运行及维护的人员,他们必须掌握下面的技巧:♦ 按安全规程规定,在线路和电气设备的供电、断电、接地和标志方面受过培训并取得资格。
西门子ADI4在数控液压伺服系统上的应用研究
西门子ADI4在数控液压伺服系统上的应用研究作者:修冬孙丽群吴庆堂来源:《科学与信息化》2019年第04期摘要为了适应高速铁路车轴数控滚压工艺需求,实现滚压力精准控制,我们设计了一种主要由液压伺服放大器、840Dsl、ADI4、ET200M和S120伺服驱动等组件构成的数控液压伺服系统。
系统硬件模块使用通信协议交换数据;液压伺服系统使用光栅尺实现位置闭环控制;使用力传感器实现滚压力反馈监测。
液压伺服系统作为执行机构避免了强化滚压过程中传动机构损伤,满足了车轴外圆及轴身滚压工艺需求。
关键词数控滚压;滚压力;ADI4;840Dsl;ET200M;S120;强化滚压引言伴随全国高速铁路网络发展,给制造业提供了广阔的商机,车轴滚压技术就是其中之一。
车轴滚压技术是对车轴外圆及轴身进行压光调整加工技术,是利用车轴材料在常温状态下冷塑性特点,使用滚轮对车轴表面金属层产生塑型流动,从而形成一定厚度的残余应力区,改善车轴金属表面的疲劳寿命、抵御应力腐蚀能力、提高表面粗糙度和硬度。
车轴滚压过程中滚轮会对车轴轴身施加侧向力,侧向力越大越会损伤机床传动机构,我们研发的数控滚压机床以液压伺服为执行机构,利用液压传动过程中抗干扰能力强,低速性强和力学性能突出等优点,更为重要的是避免了滚压过程中传动机构损伤。
西门子ADI4模拟量接口模块拥有4路TTL/SSI增量/绝对值测量系统输入和4路±10V 模拟输出控制信号,使得它成为数控系统与液压伺服之间接口模块,构建液压伺服数控系统的理想解决方案。
1 总体解决方案滚压机床整体结构由主轴箱、Z向装置、滚压装置、液压卡盘、液压尾座和机床床身等关键部件组成。
主轴电机采用变频调速,轴向通过伺服电机位置控制,径向滚压装置由两个成180度的传动装置构成,每个部分由一个液压伺服驱动,使用光栅尺作为测量反馈。
通过机床结构进行受控对象分析,电气元器件主要包括变频电机、伺服电机、液压伺服放大器、光栅尺、检查装置与其对应的驱动单元等。
西门子自动化与驱动产品在门式斗轮机纠偏控制系统中的应用
本文介绍了西门子SIMATIC S7-300 PLC、MASTERDRIVES 6SE70系列变频器和MP277触摸屏等产品在门式斗轮机纠偏控制系统中所组成的系统配置和网络结构;并从软硬件方面,叙述了关键功能的成功实现。
1.项目简介长春发电设备总厂在华能九台电厂60米跨度门式斗轮堆取料机设计中采用了先进的自动纠偏控制技术,减少了门式斗轮堆取料机的啃轨现象的发生,极大地提高了设备的生产效率,减少了企业的维护费用,减轻了维护人员的工作量。
下图一为华能九台电厂门式斗轮堆取料机图。
图一 华能九台电厂60米跨度门式斗轮堆取料机2.设备工艺介绍2.1 门式斗轮堆取料机啃轨现象门式斗轮堆取料机(简称门式斗轮机)是一种大型散货料场的专用堆取料设备,具有机械结构简单,出力大,回取率高,易操作,易维护,自动化水平高,性能稳定等特点。
门式斗轮机已成为现代化大型企业贮运料场所必备的设备之一。
但啃轨问题一直是影响门式斗轮机正常运行的技术难题。
啃轨现象是指在其行走过程中,车轮边缘和轨道相互接触摩擦,发出异常响声的现象。
啃轨现象大大缩短了车轮和轨道的使用寿命,会引起门架的弯曲扭转变形。
更换车轮、轨道和加固门架不仅影响了企业的生产效率,还增加了企业的维护费用。
造成门式斗轮机啃轨的原因很多。
一般认为产生啃轨的主要原因是由于轨道和车轮的制造、安装的机械误差引起的,但只要按照门式斗轮机安装规范要求,使用一定的检测手段是可以将误差控制在一定范围内的,也就可将啃轨降低到容许的程度。
实践证明,车轮和轨道引起啃轨的因素是暂时的,门式斗轮机其自身的因素对啃轨影响是最大的。
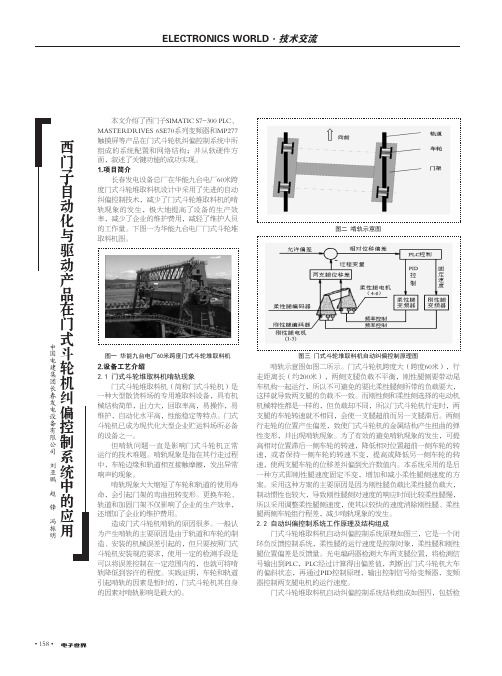
图二 啃轨示意图图三 门式斗轮堆取料机自动纠偏控制原理图啃轨示意图如图二所示。
门式斗轮机跨度大(跨度60米),行走距离长(约200米),两侧支腿负载不平衡,刚性腿侧要带动尾车机构一起运行,所以不可避免的要比柔性腿侧所带的负载要大,这样就导致两支腿的负载不一致。
而刚性侧和柔性侧选择的电动机机械特性都是一样的,但负载却不同,所以门式斗轮机行走时,两支腿的车轮转速就不相同,会使一支腿超前而另一支腿滞后。
会“思考”的伺服驱动——西门子运动控制解决方案在得力仕伺服液压成型机上的应用

会“思考”的伺服驱动——西门子运动控制解决方案在得力
仕伺服液压成型机上的应用
佚名
【期刊名称】《变频器世界》
【年(卷),期】2014(000)009
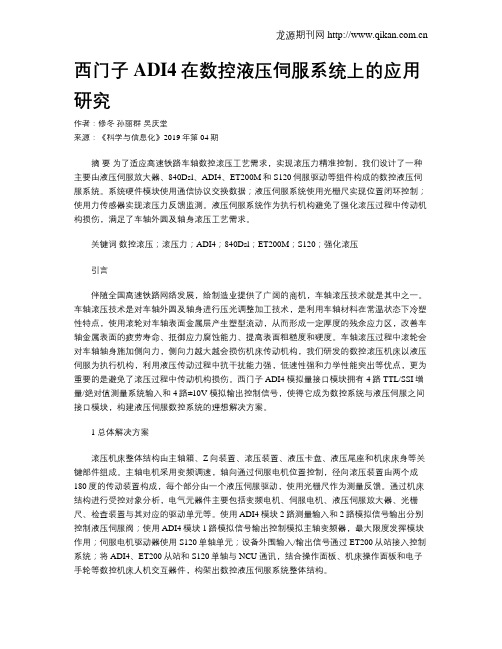
【摘要】液压成型机是工业生产中常见的成型中压设备,我们生活中用的餐盒是液压成型机的杰作。
西门子为得力仕30吨级的伺服液压成型机提供了全套电气产品解决方案,其中SINAMICS S120是会"思考"的单轴伺服驱动器,使得设备压力精度从1.5bar提高到0.1—0.3bar,位置精度从0.0 1 5mm提高到0.005—
0.0075mm,同时加工效率也得到提升,最小滑块工作循环周期为2—3s。
【总页数】3页(P10-12)
【正文语种】中文
【中图分类】TG659
【相关文献】
1.西门子伺服驱动系统在卫星式柔版印刷机上的应用 [J], 王庆林
2.西门子SINAMICSS120伺服驱动器在高速堆垛机上的应用 [J], 张军;黄海涛;
3.罗克韦尔自动化推出的具有EtherNet/IP功能的新型伺服驱动器为低轴数机器提供经济实用的协调运动控制Allen’BradleyKinetix350伺服驱动器将基于EtherNet/IP的集成运动控制拓展到规模更小的应用 [J],
4.西门子S120伺服驱动器在ZJ118卷烟机上的应用 [J], 周雪军
5.穆格于SPS/IPC/Drives2007发布新一代多轴运动控制伺服驱动器—通过创新的运动控制解决方案获取更高性能 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西门子提供了全套的电气解决方案,包含:SIMATIC S7-300、KTP600 HMI、SINAMICS S120、编码器 转换模块SMC20 西门子运动控制的算法是由德国工程师针对行业应用 专门开发的,通过数据和结构优化让算法更精简 为了提高精度,西门子将算法程序放在驱动侧S120 里运行,相比在PLC里的运算,避免了PLC与S120 的通讯时间,使得单位时间里运算次数更多,提高了 控制精度和程序运行效率 西门子的产品为德国进口,保障产品具有更高的性能, S120驱动侧算法运算周期仅为1ms
项目部门/联系人: MC/Li Ang
项目时间: 2013年10月 For internal use only / Siemens AG 2012. All Rights Reserved.
项目亮点
西门子的运动控制解决方案改变了传统通 过PLC运算的方式,将重要的工艺算法整 合成功能包,集成在 S120驱动侧运行, 避免了PLC与驱动器的通讯时间,提高运到0.1-0.3巴,位置精度从 0.015mm提高到0.005-0.0075mm 加工精度的提高使得机器的整体性能大幅提升,加工 效率也得到提升,最小循环周期为2-3s
项目名称:西门子运动控制解决方案在得力士液压成型机上的应用
客户名称:得力士液压机械有限公司 所属行业:液压成型机械
压力与位置精度是液压机最重要的两项指标,如何提 高加工精度成了最大的挑战 全新的电气方案和与之对应的全新油路是否能高效配 合,发挥出产品本身的全部性能
项目挑战
解决方案
得力士液压成型机