理论力学习题 答案(中国科技大学出版社教材课后习题)
理论力学课后习题答案第6章刚体的平面运动分析
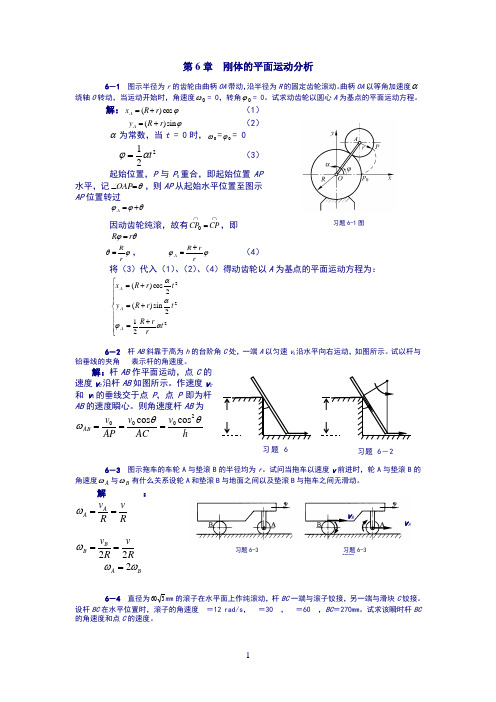
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A += (2) α为常数,当t = 0时,0ω=0ϕ= 0 221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R =ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为hv AC v AP v ABθθω2000cos cos ===6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:R v R v A A ==ωR v R v B B 22==ω B A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度=12 rad/s ,=30,=60,BC =270mm 。
理论力学课后答案Word版
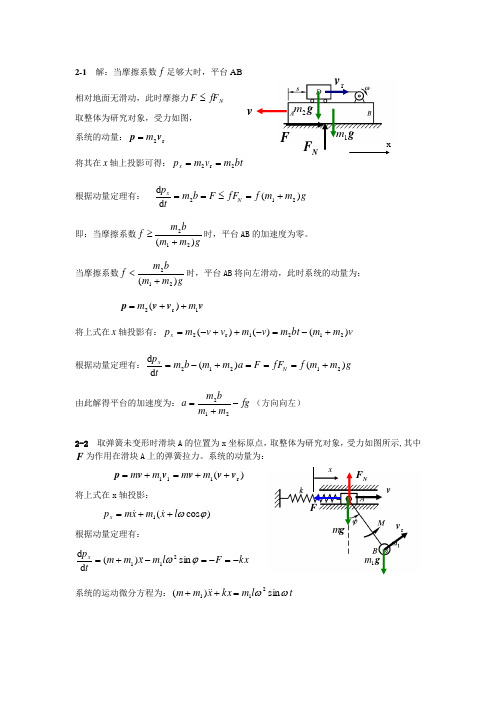
2-1 解:当摩擦系数f 足够大时,平台AB 相对地面无滑动,此时摩擦力N fF F ≤ 取整体为研究对象,受力如图, 系统的动量:r 2v p m =将其在x 轴上投影可得:bt m v m p x 2r 2==根据动量定理有:g m m f fF F b m tp N x)(d d 212+=≤== 即:当摩擦系数gm m bm f )(212+≥时,平台AB 的加速度为零。
当摩擦系数gm m bm f )(212+<时,平台AB 将向左滑动,此时系统的动量为:v v v p 1r 2)(m m ++=将上式在x 轴投影有:v m m bt m v m v v m p x )()()(2121r 2+-=-++-=根据动量定理有:g m m f fF F a m m b m tp N x)()(d d 21212+===+-= 由此解得平台的加速度为:fg m m bm a -+=212(方向向左)2-2 取弹簧未变形时滑块A 的位置为x 坐标原点,取整体为研究对象,受力如图所示,其中F 为作用在滑块A 上的弹簧拉力。
系统的动量为:)(r 111v v v v v p ++=+=m m m m将上式在x 轴投影:)cos (1ϕωl x m xm p x ++= 根据动量定理有:kx F l m xm m tp x-=-=-+=ϕωsin )(d d 211 系统的运动微分方程为:t l m kx x m m ωωsin )(211=++N Fg mg 1mFxvr vvr vN FFg 1mg 2mx2-4 取提起部分为研究对象,受力如图(a)所示,提起部分的质量为vt m ρ=,提起部分的速度为v ,根据点的复合运动可知质点并入的相对速度为r v ,方向向下,大小为v (如图a 所示)。
(a ) (b)根据变质量质点动力学方程有:v vt t t m m t t mρρr r )()(d d )(d d v g F v g F v ++=++= 将上式在y 轴上投影有:)()()()(d d 2r v vgt t F v v g vt t F tvm+-=--=ρρρ 由于0d d =tv,所以由上式可求得:)()(2v vgt t F +=ρ。
理论力学1课后习题答案解析
一、判断题(共268小题)1、试题编号:200510701005310,答案:RetEncryption(A)。
质点是这样一种物体:它具有一定的质量,但它的大小和形状在所讨论的问题中可忽略不计。
()2、试题编号:200510701005410,答案:RetEncryption(A)。
所谓刚体,就是在力的作用下,其内部任意两点之间的距离始终保持不变的物体。
()3、试题编号:200510701005510,答案:RetEncryption(B)。
在研究飞机的平衡、飞行规律以及机翼等零部件的变形时,都是把飞机看作刚体。
()4、试题编号:200510701005610,答案:RetEncryption(B)。
力对物体的作用,是不会在产生外效应的同时产生内效应的。
()5、试题编号:200510701005710,答案:RetEncryption(A)。
力学上完全可以在某一点上用一个带箭头的有向线段显示出力的三要素。
()6、试题编号:200510701005810,答案:RetEncryption(B)。
若两个力大小相等,则这两个力就等效。
()7、试题编号:200510701005910,答案:RetEncryption(B)。
凡是受二力作用的直杆就是二力杆。
()8、试题编号:200510701006010,答案:RetEncryption(A)。
若刚体受到不平行的三力作用而平衡,则此三力的作用线必汇交于一点。
()9、试题编号:200510701006110,答案:RetEncryption(A)。
在任意一个已知力系中加上或减去一个平衡力系,会改变原力系对变形体的作用效果。
()10、试题编号:200510701006210,答案:RetEncryption(A)。
绳索在受到等值、反向、沿绳索的二力作用时,并非一定是平衡的。
()11、试题编号:200510701006310,答案:RetEncryption(A)。
理论力学课后题参考答案

1.1 沿水平方向前进的枪弹,通过某一距离s 的时间为t 1,而通过下一等距离s 的时间为2t .试证明枪弹的减速度(假定是常数)为由题可知示意图如题1.1.1图: {{SSt t 题1.1.1图设开始计时的时刻速度为0v ,由题可知枪弹作匀减速运动设减速度大小为a .则有:()()⎪⎪⎩⎪⎪⎨⎧+-+=-=221210211021221t t a t t v s at t v s 由以上两式得 11021at t s v +=再由此式得 ()()2121122t t t t t t s a +-=1.26一弹性绳上端固定,下端悬有m 及m '两质点。
设a 为绳的固有长度,b 为加m 后的伸长,c 为加m '后的伸长。
今将m '任其脱离而下坠,试证质点m 在任一瞬时离上端O 的距离为解 以绳顶端为坐标原点.建立如题1.26.1图所示坐标系.题1.26.1图设绳的弹性系数为k ,则有 kb mg = ① 当 m '脱离下坠前,m 与m '系统平衡.当m '脱离下坠前,m 在拉力T 作用下上升,之后作简运.运动微分方程为 ()ym a y k mg &&=-- ② 联立①② 得 b b a g y b g y +=+&& ③ 0=+y bg y &&齐次方程通解 t b g A t b g A Y sin cos 211+= 非齐次方程③的特解 b a Y +=0 所以③的通解b a t bg A t b g A Y +++=sin cos 211代入初始条件:0=t 时,,c b a y ++=得0,21==A c A ;故有 b a t b g c y ++=cos 即为m 在任一时刻离上端O 的距离.'1.39 一质点受一与距离23次方成反比的引力作用在一直线上运动。
试证此质点自无穷远到达a 时的速率和自a 静止出发到达4a 时的速率相同。
理论力学1课后的习题答案.doc
一、判断题(共268小题)1、试题编号:200510701005310,答案:RetEncryption(A)。
质点是这样一种物体:它具有一定的质量,但它的大小和形状在所讨论的问题中可忽略不计。
()2、试题编号:200510701005410,答案:RetEncryption(A)。
所谓刚体,就是在力的作用下,其内部任意两点之间的距离始终保持不变的物体。
()3、试题编号:200510701005510,答案:RetEncryption(B)。
在研究飞机的平衡、飞行规律以及机翼等零部件的变形时,都是把飞机看作刚体。
()4、试题编号:200510701005610,答案:RetEncryption(B)。
力对物体的作用,是不会在产生外效应的同时产生内效应的。
()5、试题编号:200510701005710,答案:RetEncryption(A)。
力学上完全可以在某一点上用一个带箭头的有向线段显示出力的三要素。
()6、试题编号:200510701005810,答案:RetEncryption(B)。
若两个力大小相等,则这两个力就等效。
()7、试题编号:200510701005910,答案:RetEncryption(B)。
凡是受二力作用的直杆就是二力杆。
()8、试题编号:200510701006010,答案:RetEncryption(A)。
若刚体受到不平行的三力作用而平衡,则此三力的作用线必汇交于一点。
()9、试题编号:200510701006110,答案:RetEncryption(A)。
在任意一个已知力系中加上或减去一个平衡力系,会改变原力系对变形体的作用效果。
()10、试题编号:200510701006210,答案:RetEncryption(A)。
绳索在受到等值、反向、沿绳索的二力作用时,并非一定是平衡的。
()11、试题编号:200510701006310,答案:RetEncryption(A)。
理论力学习题答案

理论力学习题答案 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】静力学第一章习题答案1-3 试画出图示各结构中构件AB 的受力图 1-4 试画出两结构中构件ABCD 的受力图1-5 试画出图a 和b 所示刚体系整体合格构件的受力图1-5a 1-5b1- 8在四连杆机构的ABCD 的铰链B 和C 上分别作用有力F 1和F 2,机构在图示位置平衡。
试求二力F 1和F 2之间的关系。
解:杆AB ,BC ,CD 为二力杆,受力方向分别沿着各杆端点连线的方向。
解法1(解析法)假设各杆受压,分别选取销钉B 和C 为研究对象,受力如图所示: 由共点力系平衡方程,对B 点有: 对C 点有:解以上二个方程可得:22163.1362F F F ==解法2(几何法)分别选取销钉B 和C 为研究对象,根据汇交力系平衡条件,作用在B 和C点上的力构成封闭的力多边形,如图所示。
对B 点由几何关系可知:0245cos BC F F = 对C 点由几何关系可知: 0130cos F F BC解以上两式可得:2163.1F F =静力学第二章习题答案F 2F BC F AB B45oyx F BCF CDC60o F 130o xy F BC F CD 60o F 130o F 2F BC F AB 45o2-3 在图示结构中,二曲杆重不计,曲杆AB 上作用有主动力偶M 。
试求A 和C 点处的约束力。
解:BC 为二力杆(受力如图所示),故曲杆AB 在B 点处受到约束力的方向沿BC 两点连线的方向。
曲杆AB 受到主动力偶M 的作用,A 点和B 点处的约束力必须构成一个力偶才能使曲杆AB 保持平衡。
AB 受力如图所示,由力偶系作用下刚体的平衡方程有(设力偶逆时针为正): 其中:31tan =θ。
对BC 杆有:aM F F F A B C 354.0=== A ,C 两点约束力的方向如图所示。
(完整版)理论力学_习题集(含答案).doc

《理论力学》课程习题集西南科技大学成人、网络教育学院版权所有习题【说明】:本课程《理论力学》(编号为 06015)共有单选题 , 计算题 , 判断题 ,填空题等多种试题类型,其中,本习题集中有[ 判断题 ] 等试题类型未进入。
一、单选题1. 作用在刚体上仅有二力F A、 F B,且 F A F B 0 ,则此刚体________。
⑴、一定平衡⑵、一定不平衡⑶、平衡与否不能判断2. 作用在刚体上仅有二力偶,其力偶矩矢分别为M A、M B,且M A+M B 0 ,则此刚体 ________ 。
⑴、一定平衡⑵、一定不平衡⑶、平衡与否不能判断3. 汇交于 O 点的平面汇交力系,其平衡方程式可表示为二力矩形式。
即m A F i 0 ,m B F i 0 ,但________。
⑴、 A 、 B 两点中有一点与O 点重合⑵、点 O 不在 A 、 B 两点的连线上⑶、点 O 应在 A 、 B 两点的连线上⑷、不存在二力矩形式,X 0, Y 0 是唯一的4. 力F在 x 轴上的投影为 F ,则该力在与x 轴共面的任一轴上的投影________ 。
⑴、一定不等于零⑵、不一定等于零⑶、一定等于零⑷、等于 F________。
5. 若平面一般力系简化的结果与简化中心无关,则该力系的简化结果为⑴、一合力⑵、平衡⑶、一合力偶⑷、一个力偶或平衡6.若平面力系对一点 A 的主矩为零,则此力系________。
⑴、不可能合成一个力⑵、不可能合成一个力偶⑶、一定平衡⑷、可能合成一个力偶,也可能平衡7.已知 F1、 F2、 F3、 F4为作用刚体上的平面共点力系,其力矢关系如图所示为平行四边形,因此可知________。
⑴、力系可合成为一个力偶⑵、力系可合成为一个力⑶、力系简化为一个力和一个力偶⑷、力系的合力为零,力系平衡8. 已知一平衡的平面任意力系F1、 F2F n1,如图,则平衡方程m A 0 ,m B 0 ,Y 0中(AB y ),有________个方程是独立的。
理论力学第七版课后习题答案
理论力学第七版课后习题答案第一章: 引言习题1-11.问题描述:给定物体的质量m=2kg,加速度a=3m/s^2,求引力F。
2.解答:根据牛顿第二定律F=ma,其中m表示物体的质量,a表示物体的加速度。
代入已知值,可求得F=6N。
习题1-21.问题描述:给定物体的质量m=5kg,引力F=20N,求加速度a。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=4m/s^2。
第二章: 运动的描述习题2-11.问题描述:一个物体以恒定速度v=10m/s匀速直线运动,经过t=5s,求物体的位移。
2.解答:位移等于速度乘以时间,即s=vt。
代入已知值,可得s=50m。
习题2-21.问题描述:一个物体以初始速度v0=5m/s匀加速直线运动,加速度a=2m/s^2,经过t=3s,求物体的位移。
2.解答:由于物体是匀加速直线运动,位移可以通过公式s=v0t+0.5at^2计算。
代入已知值,可得s=(53)+(0.52*3^2)=45m。
第三章: 动力学基础习题3-11.问题描述:一个物体质量为m=4kg,受到的力F=10N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2.5m/s^2。
习题3-21.问题描述:一个物体质量为m=3kg,受到的力F=6N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
第四章: 动力学基本定理习题4-11.问题描述:一个物体质量为m=8kg,受到的力F=16N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
习题4-21.问题描述:一个物体质量为m=6kg,受到的力F=12N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
以上是理论力学第七版课后习题的答案。
希望能对你的学习有所帮助!。
2024年中科大理论力学课后习题答案

注意事项
在使用课后习题答案时,学生需要注意以下几点:一是不要完全依赖答案,要 注重自己的思考和总结;二是要注意答案的适用范围和条件,避免盲目套用; 三是要及时反馈和纠正答案中的错误或不足之处。
2024/2/29
6
02 质点与刚体运动 学
2024/2/29
7
质点运动学基本概念
质点的定义
质点是一个理想化的物理模型,忽略 物体的形状和大小,只考虑其质量。
2024/2/29
02
答案
根据牛顿第二定律,合外力$F_{ 合}=ma$,则合外力做的功 $W_{合}=F_{合}l=mal$,其中 $l=v_{0}t+frac{1}{2}at^{2}$为 物体在t时间内的位移。功率 $P_{合}=F_{合}v=mav$,其中 v为物体在t时刻的瞬时速度, $v=v_{0}+at$。
15
实际应用举例及拓展
2024/2/29
01
应用一
汽车行驶过程中的动力学分析。汽车行驶时受到发动机的动力、地面的
摩擦力和空气阻力等作用,通过动力学分析可以优化汽车的设计和行驶
性能。
02
应用二
航空航天领域的动力学问题。航空航天领域涉及大量的动力学问题,如
火箭发射、卫星轨道计算等,需要运用动力学原理进行精确分析和计算
03 题目2
一轻绳跨过定滑轮,两端分别系 有质量为m1和m2的物体,且 m1>m2,开始时两物体均静止 ,当剪断轻绳后,求两物体的加 速度和速度变化。
25
04
答案
剪断轻绳后,两物体均做自由落 体运动,加速度均为g。由于两 物体初始时刻均静止,因此速度 变化量相同,即$Delta v=gt$, 其中t为物体下落的时间。
理论力学1课后习题答案解析
一、判断题(共268小题)1、试题编号:200510701005310,答案:RetEncryption(A)。
质点是这样一种物体:它具有一定的质量,但它的大小和形状在所讨论的问题中可忽略不计。
()2、试题编号:200510701005410,答案:RetEncryption(A)。
所谓刚体,就是在力的作用下,其内部任意两点之间的距离始终保持不变的物体。
()3、试题编号:200510701005510,答案:RetEncryption(B)。
在研究飞机的平衡、飞行规律以及机翼等零部件的变形时,都是把飞机看作刚体。
()4、试题编号:200510701005610,答案:RetEncryption(B)。
力对物体的作用,是不会在产生外效应的同时产生内效应的。
()5、试题编号:200510701005710,答案:RetEncryption(A)。
力学上完全可以在某一点上用一个带箭头的有向线段显示出力的三要素。
()6、试题编号:200510701005810,答案:RetEncryption(B)。
若两个力大小相等,则这两个力就等效。
()7、试题编号:200510701005910,答案:RetEncryption(B)。
凡是受二力作用的直杆就是二力杆。
()8、试题编号:200510701006010,答案:RetEncryption(A)。
若刚体受到不平行的三力作用而平衡,则此三力的作用线必汇交于一点。
()9、试题编号:200510701006110,答案:RetEncryption(A)。
在任意一个已知力系中加上或减去一个平衡力系,会改变原力系对变形体的作用效果。
()10、试题编号:200510701006210,答案:RetEncryption(A)。
绳索在受到等值、反向、沿绳索的二力作用时,并非一定是平衡的。
()11、试题编号:200510701006310,答案:RetEncryption(A)。
《理论力学》课后习题解答(赫桐生版)
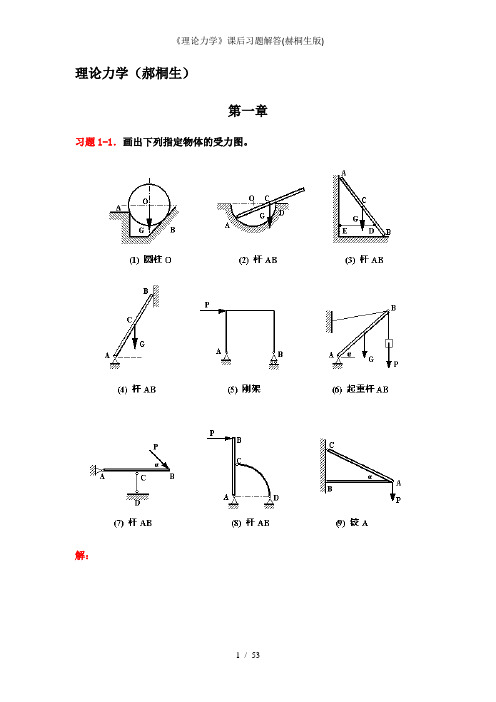
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
理论力学(第2版)习题答案

各章习题(计算题)部分答案第1章 略 第2章2-1 R 3284kN F .=,R cos()2063,.=︒F i ,R cos()1163,.=︒F j 2-2 3162kN T .=,30β=︒ 2-3 482.α=︒,R 496kN x F .= 2-4 11866N 50N x y F .F ==,2230N 40N x y F F ==-, 330N 60N x y F F ==, 44566N 566N x y F .F .==, 2-5 R 0F =2-6(a) 707kN 354kN 354kN Ax Ay B F .F .F .===,,(b) 05kN 5kN Ax Ay B F F F ===,,(c) 933kN 433kN 612kN Ax Ay B F .F .F .===,,(垂直于支撑面,指向简支梁) 2-7 min 15kN F =,N 25kN F =2-8 0866kN 05kN 1kN Ax Ay BD F .F .T ===,, 2-9 N N 1732kN 3464kN 15m A C F .F .AC .===,, 2-10 03436kN AB AC F F .==,2-11 BC F =,Ax F =,Ay F G = 2-12 N 65EF G F =+2-13 N N C D F F =2-14 231N 1155N 231N 845N AB AE BC BD F F .F F .====,,,2-15 (a) 33PF P F B Ay =-=,(b) P F F B A 32== (A F ,B F 方向相反,组成一力偶) (c) 0==B A F F2-16 1F,AB F,OA F =,7kN BC F =- 2-17 1905N 1905N 1905N 1905N Ax Ay Cx Cy F F F F =-===-,,, 2-18 3571N 3571N 3571N 3571N Ax Ay Cx Cy F F F F ==-=-=,,,·312··312·2-19 24kN m M =⋅,1155kN A B F F .== 第3章3-1 2400N Ax F =,1200N Ay F =,8485N BC F .= 3-2 R 0F'=,260N m O M =⋅ 3-3 (a) R F'qa =,221qa M O = (b) R12F'ql =,21ql q M O = 3-4(a) Ax F =,40kN Ay F =,120kN m A M =⋅,N C F = (b) 0=AxF ,25kN Ay F .=-,15kN By F =,D 25kN y F .=3-5 当60α=︒时,min 4AB PrF L= 3-6 0=Ax F ,qa F Ay2=,2qa M A =3-7 (a)2400N Ax F =,1000N Ay F =-,2400N Dx F =-,2000N Dy F = (b)2400N Ax F =-,1000N Ay F =-,2400N Dx F =,2000N Dy F =3-8 Ax F =,Ay F =,Bx F =,By F =3-9 rPLF Ax 2-=,P F Ay =,r PL F Bx 2=,P F By =,r PL F D 2=,P F C 2=3-10 R 32E F qa =-,qa F BD 22= 3-11 23kN Ax Cx F F .=-=-,1kN Ay Cy F F == 3-12 3PF AC -=,0=EF F ,32P F BD -= 3-13 2F F BC=,2F F DE = 第4章4-1 T 20kN F =,104kN OA F .=-,139kN OB F .=- 4-2 254kN m x M .=⋅,146kN m y M .=⋅,0=z M 4-3 0)(=P z M4-4 θαsin sin )(Pa M AB =P 4-5 3C A B WT T T ===4-6 1kN T =,0=Ax F ,750N Ay F =-,500N Az F =-,433N Bx F =,500N BZ F = 4-7 F F F -==61,F F =3,0542===F F F·313··313·4-8 321M a cM a b M +=,a M F Ay 3=,a M F Az 2=,0=Dx F ,a M F Dy 3-=,aM F Dz 2-= 4-9 4kN Ax F =,146kN Az F .=-,79kN Bx F .=,29kN Bz F .=-4-10 5kN Ox F =-,4kN Oy F =-,8kN Oz F =,32kN m Ox M =⋅,30kN m Oy M =-⋅,20kN m Oz M =⋅4-11 (a ) 10412kN N F .=,20213kN N F .=,30375kN N F .= 4-12 )(22221221r r r r x C --=,0=C y4-13 (a ) 589mm C x .=-,0=C y (b ) 797mm C x .=,349mm C y .= 4-14 )(22221221r r r r x C --=,0=C y4-15 0Ax F =,121(P )2Ay F P =-+,21P 2Az P F =+,0Cx F =,0Cy F =,22Cz P F =第5章5-1 min F =,s arctan f α= 5-2 )()m m sin +cos -P F αϕθϕ=,m θϕ=5-3 (1) A 先滑动,(2) A 、B 一起滑动 5-4 能保持平衡,S 201N F = 5-5 223.0=f5-6 3πarcsin 43πff α=+5-7 1s sin cos P F f αα=-,2s sin cos PF f αα=+,故21F F >5-8 min 845kN Q .= 5-9 435N P .=5-10 θ≤9926.︒5-11 120cm x >5-12 s 2(sin cos )Q R f L αα⋅+≤P ≤s 2(sin cos )Q Rf L αα⋅-5-13 min 1475N P .=5-14 4961N m .⋅≤C M ≤7039N m .⋅ 5-15 11cm b <5-16s s sin cos cos sin f Q f αααα-+≤P ≤s s sin cos cos sin f Q f αααα+- 5-17 arc ϕ=·314··314·5-18 500N P = 5-19 s f ≥15.0 5-20 75mm b .< 第6章6-1 (cos sin )x v lk kt kt =-,(cos sin )y v lk kt kt =-+; )sin (cos 2kt kt lk a x +-=,)sin (cos 2kt kt lk a y --= 6-2 (1) 0=s ;v R ω=;0a τ=,2n a R ω=(2) R s 23=;12v R ω=;2a ωτ=,2n 14a R ω= (3) R s =;0v =;2a R ωτ=-,n 0a =6-3 直角坐标法:t R x ω2cos =,t R y ω2sin =;2sin2x v R t ωω=-,2cos2y v R t ωω=; t R a x ωω2cos 42-=,t R a y ωω2sin 42-=自然坐标法:t R s ω2=;2v R ω=;0a τ=,2n 4a R ω= 6-4 ()sin M x l b t ω=+,()cos M y l b t ω=-;22221()()M M x y l b l b +=+-6.52222()1()x a y b l l-+=+6-6 22)sin (cos h t r l t r x B +-+=ωω,h y B -=6-7v =322xb u a -= 6-8 )cos sin arctan(00tr h tr ωωθ-=6-9 当0s t =时,157cm s M v ./=;0M a τ=,n2617cm s M a ./=当2s t =时,0M v =;2123cm s M a ./τ=-,n0M a =6-10 C x =C y =2C avv l=6-11 t e R t e y ωω222cos sin -+=;[cos v e t ωω=6-12 02cos4m x .t =;0566m s v ./=-;22263m s a ./=-6-13 0arctan rad v tbϕ=;02220rad s bv /b v t ω=+6-14 225t =ϕ;120m s v /=;236000m s n a /= 6-15 8rad s /ω=;2384rad s ./ε=-6-16 转轴O 的位置位于正方形的中心;1rad s /ω=,21rad s /ε=6-17 12C v r ω=;n 214C a r ω=,12C a r ετ=·315··315·6-18 12m s M v ./=;n 272m s M a ./=,206m s M a ./τ= 6-19 0377m s C v ./=6-20 2225000rad s /dεπ=;25922m s a ./= 6-21 32rad .ϕ=6-22 12mm h =6-23 02=ω,222r lb ωε-=6-24 02m s AB v ./=,2005m s AB a ./=;02m s C v ./=,n 20267m s C a ./=,2005m s C a ./τ=6-25 2012ωr a =,方向沿1AO ;2024ωr a =,指向轮心第7章7-1 x'vt =,cos()a kt y'ϕ=+,轨迹方程为cos()ky'a x'vϕ=+ 7-2 2cos M v R ωϕ=,方向水平向左 7-3 (a )2309rad s ./ω=; (b )2182rad s ./ω=7-4 (1)34OC v b ω=,34C lv v b=;(2)234K v a b = 7-5 当0ϕ︒=时,0v =;当30ϕ=︒时,100cm s v /=,向右;当90ϕ︒=时,200cm s v /=,向右7-6 126m s BC v ./=;2274m s BC a ./= 7-7 10cm s CD v /=;2346cm s CD a ./= 7-8 a a =7-9 3v ω=,方向向上7-10 1.732rad /s ω=,28.66rad /s ε=- 7-11 0.173m /s v =,20.05m /s a = 7-12 0.173m /s M v =,20.35m/s M a =7-13 πcos 15sin BC nr v αβ=7-14 23CD r v ω=;29310ωr a C D =7-15 a 3465mm s v ./=;21400mm s CD a /=第8章8-1 122v v r ω-=,122O v v v +=8-2 156cm s C v ./=,17cm s D v /=·316··316·8-3 877cm s C v ./=8-4 375rad s OB ./ω=,I 6rad s /ω=8-5 600mm s A v /=,200mm s B v /=,s C v /=;4rad s 3ABC /ω=,05rad s BD ./ω= 8-6 2rad s AB /ω=,2578rad s AB ./ε=-;667rad s BC ./ω=-,21926rad s BC ./ε=8-7 2()C A Rv a R r r=-,2Bx C a a τ=,2(2)()C By R r v a R r r -=- 8-8 2022ωr a B =,20211ωε=B O 8-9 032C v r ω=,20123ωr a C =8-10 01.15v l ω=8-11 16186rad s O C ./ω=,127817rad s O C ./ε=-8-12 s CD v /=,22m s 3CD a /= 8-13 n 2400cm s B a /=,21705cm s B a ./τ=-,21705cm s C a ./=-8-14 34e OC v v OB b ω==,OC ε=;12E v v =,E a = 8-15 21960mm s B a /=,298rad s AB ./ε=8-160C v ω,方向向左;rR B O 01ωω=,逆时针转向8-17 22()C Rv a R r =-,B a =8-18 n 202B a a ω=,2002)B a a ετ=-8-19 330ωω=B ;209)349(10ω+-=B a 8-20 2m s B v /=,2828m s C v ./=,28m s B a /=,21131m s C a ./= 第9章9-1 rgf=max ω 9-2 min 67r min n /=9-3 1v =9-4 0cos cos sin v x b kt kt k α=+,0sin sin vy kt kα=9-5 0cos x v t α=,201sin 2y v t gt α=+·317··317·9-6 0(1e )kt v s k-=- 9-7 202s t .=,707m s .= 9-8 172N F .=9-9 )(22g a amL F AC +=ω,)(22g a a mL F BC -=ω9-10 max 584kN F .=,min 536kN F .=9-11 g f f a ααααsin cos cos sin -+=,N cos sin W F f αα=- 9-12 )cos 1(200t m F t x ωωυ-+=第10章10-1 (a ) 12p mL ω=,方向水平向右;(b ) p mR ω=,方向水平向右;(c ) p me ω=,方向垂直于OC 的连线;(d ) C p mv =,方向水平向右10-2 30N x F =10-3 11221022a gP P P P F -++= 10-4 11r 12m v v v m m =++10-5 0(sin cos )v t g f'αα=-10-6 12(54)2l p m m ω=+,方向与曲柄垂直且向上 10-7 t m m l m x m m kx ωωsin 1211+=++10-8 2R s =10-9 (1) 3123123(22)cos ,2()C P L P P P L tx P P P ω+++=++ (2) 12123(2)sin ;2()C P P L t y P P P ω+=++2321max 222ωL gP P P F Ox ++=10-10 椭圆 2224l y x =+10-11 (1) 2sin G Wx l t P W Gω+=++ (2) 2m a x 2x G W F l g ω+=10-12 向右移377cm . 10-13 33(sin )cos ox R F m g m a r θθ=+,1233()(sin )sin oy RF m g m g a m g m a rθθ=+-++ 10-14 21212)(m m gm m f b m a ++-=·318··318·10-15 17cm A s =,向左移动;9cm B s =,向右移动 10-16 2max12(2)2ox r F F G G gω=++10-17 24(cos sin )3Ox mR F ωϕεϕπ=-+,24(sin cos )3Oy mR F mg ωϕεϕπ=+- 第11章11-1 (a ) ω2031ml L =,(b ) ω2021mR L =,(a ) ω2023mR L =11-2 208m s a ./=,2862kN T F .=,4626kN Oy F .=11-3 (1) ωωω22231ml mR Ml L O ---=,(2) ωω2231ml Ml L O --=11-4 θω22sin )312(l M m L O +=11-5 480r min n /=11-6 022ωωmr J ma J z z ++=11-7 0N 0Pr F fgt ω= 11-8 211212122()()R M R M'm m R R ε-=+11-9 )()(2212J i J gPR R PR Mi a ++-=11-10 t P P gkl)3(3cos210+=δϕ11-11 gR RW g J R W M a 2101sin +-=α,1T 1sin W F W a g α=+ 11-12 g J r m r m r m r m O++-=2222111122ε11-13 g R m r R m r R m a )()()(2222121ρ++++=,)()()(22221212ρρ+++-=R m r R m g m m Rr F11-14 v =T 13F mg =11-15 θsin 74g a =,θsin 71mg F -= 11-16 g a C 355.0=11-17 3)(2121m m gm m f F a ++-=·319··319·11-18 gr M R m r m R fm r m a 2222121ρ++-=,T 11A F m g m a =-,2T 2B m RF fm g a r=+11-19 2N 22sin 12D QL F a Lα=+,αcos g a Cx =,22212sin 12L a g a a Cy +=α 11-20 N 3633N B F .=11-21 P F F x O x O 516.021==,P F y O 434.11=,P F y O 164.12=第12章12-1 )cos 1(0ϕ+=mgr W AB ,)sin (cos 0θϕ-=mgr W AC 12-2 129904J F W .=,10500J f W =- 12-3 12206J W .=-,23206J W .=,031=W 12-4 (a) 2216T ml ω=,(b) 2234T mR ω=,(c) 2214T mR ω=,(d) 234C T mv =,12-5 10J W =重,503J W .=重12-6 θω222sin 61ml T = 12-7 21s s hf += 12-8 2122)cos (sin 2m m f gr m M r++-=ααϕϕω12-9 v=12-10 A v =12-11 A v =12-12 v =11/sin M R W a g W Wα-=+12-13 C v =45C a g =12-14 98N F .= 12-15 θωsin 3632121l g m m m m ++=,θεcos 23632121lgm m m m ++=12-16 C v =321321843)43(m m m gm m m F +++=12-17 (1) 2211)3()sin (2Rm m gR m M +-=αε, (2) R m m gR m M m F Ox )3(2)2sin cos 6(2121++=αα; ααsin )3()sin 3(21212⋅+++=Rm m gR m M m g m F Oy·320··320·12-18 v =m khmg a 34-=,41s 36F kh mg =+ 第13章13-1 αsin 32g a =13-2 g a 32=,T 3WF =13-3 Q P Pg a 322+=,QP PQF 32+=13-4 g P T a 3cos 2α=,N sin F P T α=-,s 1cos 3F T α= 13-5 22233cos sin 3()sin 2b a g b a ϕϕωϕ-=-13-6 445N ADF .=,54N BE F =13-7 2222(sin )cos sin J mr mr M ϕϕϕϕϕ++= 13-8 2222143)2(43ωr m gr m m M -+=,2143ωr m F Ox -=,4)2()(22121ωr m m g m m F Oy +-+= 13-9 0β=︒时,2329N Ax F =-,1382N Bx F =,1962N Ay By F F .==180β=︒时,12238N Ax F .=,592N Bx F =-,1962N Ay By F F .==13-10 2023ωmr F Ax -=,mgr F Ay =,20221ωmr F Bx =,mgr F By =13-11 g a a C x C 1712==,mg F 175= 13-12 l g 791=ε,lg 732-=ε,0=Ox F ,mg F Oy 72=第14章14-1 ctg 2P /Q /ϕ= 14-2 (3ctg 2)Ax F /P θ=14-3 A F P /=14-4 ctg Q P θ= 14-5 450N Q P /==14-6 12F F l =/2(cos )a ϕ14-7 05kN 21kN m Ax Ay A F F m ===⋅,,14-8 1866kN P .=14-9 2()F lx a k b=+14-10 2(kN)Ax F =, 3.804(kN)Ay F =,24(kN m)A M =-⋅,18.588(kN)B F =。
理论力学习题答案(修改6月19日)
⃗rc
=
m1⃗r1
+
m2⃗r2 M
+ m3⃗r3
=
1 3
( 2ˆi + ˆj +
) 3kˆ ,
⃗vc
=
⃗r˙c
=
ˆj
+
1 kˆ, 3
p⃗c = M⃗vc = 3ˆj + kˆ,
∑3 J⃗ = mi⃗ri × ⃗vi = −3ˆi + 3kˆ,
i=1
T
=
∑3
1 2
mi
vi2
=
4.
i=1
4. 证明:两质点系的角动量为,J⃗ = R⃗ c × M V⃗c + ⃗r × µ⃗v,其中,M = m1 + m2, µ 为折合质量,⃗r 为相对位矢,c 表示质心。
6
6. 半径为 r 的均质圆球在半径为 R 的固定圆柱的内表面滚动,试求圆球绕平
衡位置做微振动的运动方程及周期。
解:
vc
=
(R
−
r)θ˙, ω
=
(R
− r
r)θ˙ , Ic
=
2 mr2 5
T
=
1 2
mvc2
+
1 2
Icω2
= 7 m(R − r)2θ˙2 10
V = mg (R − (R − r) cos θ)
l
2± 2 g
7
8. 如果上题的双摆系统不是系在固定点上,而是系在一个可以在光滑水平杆 上自由运动的质量为 2m 的小环上,继续令 m1 = m2 = m,l1 = l2 = l,试 求系统的运动方程及周期。
解:
L=T −V
=