方位角与象限角复习过程
方位角计算公式
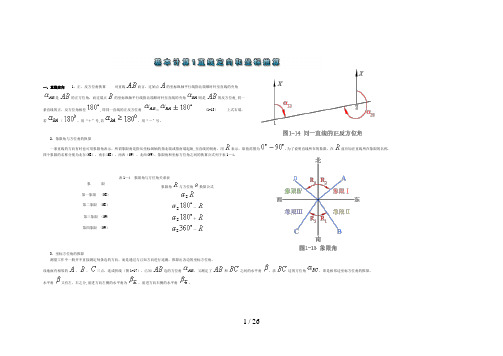
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13〉上式右端,若〈,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为.为了说明直线所在的象限,在前应加注直线所在象限的名称.四个象限的名称分别为北东<NE)、南东<SE)、南西(SW〉、北西(NW>。
象限角和坐标方位角之间的换算公式列于表1—4。
表1—4 象限角与方位角关系表象限象限角与方位角换算公式第一象限〈NE)=第二象限<SE)=-第三象限<SW)=+第四象限<NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线〈图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
1 / 26设三点相关位置如图1-17(〉所示,应有=++ (1—14〉设三点相关位置如图1-17(〉所示,应有=++-=+- (1-15〉若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16〉显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=-(1—17〉上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
2 / 26二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
坐标方位角和象限角的关系表-概述说明以及解释

坐标方位角和象限角的关系表-概述说明以及解释1.引言1.1 概述在几何学和数学中,坐标方位角和象限角是两个重要的概念。
坐标方位角是指向任意点在直角坐标系中与正向X 轴的夹角,通常用弧度或度数表示;而象限角是指一个角落在某一象限内的角度,从正向X 轴逆时针旋转而来,范围通常是0 到360。
本文将探讨坐标方位角与象限角之间的关系,分析它们在数学和几何中的重要性。
通过对这两个角度概念的深入研究,我们可以更好地理解空间中位置和方向的表示方式,并且在实际问题中进行角度计算和图形分析。
在本文的结论部分,我们将总结这两种角度概念的关系,提供一些应用举例并展望未来可能的研究方向。
通过本文的阅读,读者可以更全面地了解坐标方位角和象限角的关系,为进一步学习和研究奠定基础。
1.2文章结构1.2 文章结构本文主要分为引言、正文和结论三个部分。
在引言部分中,将对坐标方位角和象限角的概念进行概述,介绍本文的结构以及文章撰写的目的。
在正文部分中,将详细讨论坐标方位角的定义和范围,象限角的定义和性质,以及两者之间的关系。
在结论部分中,将对文章进行总结,提出相关的应用举例,并展望未来的研究方向。
通过这样的结构安排,读者可以系统地了解和掌握坐标方位角和象限角的知识,并进一步探讨其在实际问题中的应用和发展前景。
1.3 目的本文旨在探讨坐标方位角和象限角之间的关系,帮助读者更深入地理解这两个概念在数学中的应用和意义。
通过对坐标方位角和象限角的定义、范围以及性质进行详细分析,我们将揭示它们之间的联系,并探讨它们在解决实际问题中的应用。
通过本文的阐述,读者可以更好地理解和运用坐标方位角和象限角,从而提高数学解题的能力和水平。
通过具体的应用举例,我们将展示坐标方位角和象限角在实际问题中的运用,帮助读者更好地理解其实际意义。
最后,我们将展望未来研究的方向,为进一步深入研究和探讨坐标方位角和象限角的相关问题提供思路和指导。
通过本文的阐述,我们希望读者可以全面了解和掌握坐标方位角和象限角的知识,从而更好地运用于实际生活和学习中。
坐标方位角与象限角的关系

坐标方位角与象限角的关系
坐标方位角和象限角是两种表示向量在平面直角坐标系中位置的方式。
它们的关系如下:
1. 第一象限的坐标方位角等于第四象限的象限角。
2. 第二象限的坐标方位角等于第三象限的象限角。
3. 坐标轴上的向量没有坐标方位角和象限角。
4. 如果向量终点在原点的左侧或下方,则其坐标方位角需要加上180°,而象限角需要加上π。
5. 如果向量的x坐标为负数,则其坐标方位角需要加上180°,而象限角需要加上π。
6. 如果向量的y坐标为负数,则其坐标方位角需要加上360°,而象限角需要加上2π。
综上所述,坐标方位角和象限角之间的关系取决于向量在平面直角坐标系中所处的象限和坐标轴方向。
方位角计算公式.

一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式第一象限(NE)=第二象限(SE)=-第三象限(SW)=+第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
[初中数学]方位角与方向角问题教案-人教版
![[初中数学]方位角与方向角问题教案-人教版](https://img.taocdn.com/s3/m/0a146ccd6bd97f192279e9f1.png)
[初中数学]方位角与方向角问题教案-人教版《方位角与方向角问题》教案复习引入本节课将应用解直角三角形知识解决测量中的方位角问题.探究新知(一)方位角与方向角1.方向角教师讲解:指北或指南方向线与目标方向所成的小于90°的角叫做方向角.如课本图28.2-1中的目标方向线OA,OB,OC分别表示北偏东60°,南偏东30°,北偏西70°.特别地,若目标方向线与指北或指南的方向线成45°的角,如图28.2-1的目标方向线OD与正南方向成45°角,通常称为西南方向.图28.2-1 图28.2-22.方位角教师讲解:从某点的指北方向线按顺时针转到目标方向的水平角,叫做方位角.•如课本图海轮位于灯塔P的北偏东65°方向,•距离灯塔80海里的A处,它沿正南方向航行一段时间后,•到达位于灯塔P的南偏东34°方向上的B处.这时,海轮所在的B处距离灯塔P有多远?(精确到0.01海里)教师提示:这道题的解题思路与上一节课的例4相似.因为△APB不是一个直角三角形,所以我们把一个三角形分解为两个直角三角形,△ACP与△PCB.PC•是东西走向的一条直线.AB是南北走向的一直线,所以AB与PC是相互垂直的,即∠ACP与∠BDP•均为直角.再通过65度角与∠APC互余的关系求∠APC;通过34度角与∠BPC•互余的关系求∠BPC.教师分析后要求学生自行做完这道题.学生做完后教师再加以总结并板书.解:如课本图28.2-8,在Rt△APC中,PC=PA·cos(90°-65°)=80×cos25°≈80×0.91=72.8.在Rt △BPC 中,∠B=34°,∵sinB=PC PB , ∴PB=72.872.8sin sin 340.559PC B =≈︒≈130.23. 因此,当海轮到达位于灯塔P 的南偏东34°方向时,它距离灯塔P 大约130.23海里.教师讲解:解直角三角形有广泛的应用,解决问题时,•要根据实际情况灵活运用相关知识.例如,当我们要测量如课本图28.2-9所示大坝的高度h 时,只要测出仰角α和大坝的坡面长度L ,就能算出h=Lsin α.但是,当我们要测量如课本图28.2-10所示的山高h 时,问题就不那么简单了.这是由于不能很方便地得到仰角α和山坡长度L .图28.2-9图28.2-10 与测坝高相比,测山高的困难在于:坝坡是“直”的,而山坡是“曲”的.怎样解决这样的问题呢?我们设法“化曲为直,以直代曲”.我们可以把山坡“化整为零”地划分为一些小段,课本图28.2-11表示其中一部分小段.划分小段时,注意使每一小段上的山坡近似是“直”的,可以量出这段坡长L1,测出相应的仰角α,这样就可以算出这段山坡的高度h1=L1sinα.图28.2-11在每个小段上,我们都构造出直角三角形,利用上面的方法分别算出各段山坡的高度h1,h2,…….然后我们再“积零为整”,把h1,h2,…相加,于是得到山高h.以上解决问题中所用的“化整为零,积零为整”“化曲为直,以直代曲”的做法,就是高等数学中微积分的基本思想,它在数学中有重要地位,在今后的学习中,你会更多地了解这方面的内容.随堂练习课本第95页练习第1题、第2题.课时总结利用解直角三角形的知识解决实际问题的一般过程是:1.将实际问题抽象为数学问题(画出平面图形,•转化为解直角三角形的问题).2.根据条件的特点,适当选用锐角三角函数等去解直角三角形.3.得到数学问题的答案.4.得到实际问题的答案.教后反思:__________________________________________ ________________________________________________________________________ __________________________________第4课时作业设计课本练习课本第97页习题28.2拓广探索第9题、第10题.双基与中考一、选择题.1.如图,轮船航行到C处时,观测到小岛B 的方向是北偏西35°,那么同时从B观测到轮船的方向是().A.南偏西35° B.东偏西35°C.南偏东55° D.南偏东35°(第1题) (第5题) (第8题)2.•身高相同的三个小朋友甲、•乙、•丙放风筝,•他们放出的线长分别是300m,250m,200m,线与地面所成的角分别为30°、45°、60°(假设风筝线是拉直的),则三人所放风筝().A.甲的最高 B.乙的最低 C.丙的最低 D.乙的最高3.一日上午8时到12时,若太阳光线与地面所成角由30°增大到45°,•一棵树的高为10m,则树在地面上影长h的范围是().A.5<h≤103B.10≤h≤103C.10<h<15 D.34.△ABC中,AB=6,AC=3,则∠B最大值是().A.30° B.45° C.60° D.无法确定5.如图,水库大坝横断面为梯形,坝顶宽6m,坝高2m,斜坡AB的坡角为45°,•斜坡CD的坡度i=1:2,则坝底AD的长为().)m C.78mA.42m B.(D.(m6.△ABC+(2=0且AB=4,则△ABC的面积是().A..4 C..27.一渔船上的渔民在A处看见灯塔M在北偏东60°方向,这艘船以28海里/小时的速度向正东航行,半小时到B处,在B处看见灯塔M在北偏东15°方向,此时,灯塔M与渔船的距离是().A.B. C.7 D.148.某地夏季中午,当太阳移到屋顶上方偏南时光线与地面成80°角,房屋朝南的窗子高AB=1.8m;要在窗子外面上方安装一个水平挡光板AC,•使午间光线不能直接射入室内,那么挡光板AC 的宽度应为( ).A . 1.8tan80°mB .1.8cos80°mC . 1.8sin 80D .1.8cot80°m9.若菱形的边长为4,它的一个内角为126°,则较短的对角线长为( ).A .4sin54°B .4cos63°C .8sin27°D .8cos27°10.如图,上午9时,一条船从A 处出发以20海里/小时的速度向正北方向航行,•11时到达B 处,从A 、B 望灯塔C ,测得∠NAC=36°,∠NBC=72°,那么从B 处到灯塔C 的距离是( ).A .20海里B .36海里C .72海里 D .40海里北BA NC(第10题) (第11题)11.如图,一电线杆AB的影子分别落在了地上和墙上,某一时刻,小明竖起1•米高的直杆,量得其影长为0.5米,此时,他又量得电线杆AB 落在地上的影子BD长3米,落在墙上的影子CD 的高为2米,小明用这些数据很快算出了电线杆AB的高,•请你计算电线杆AB的高为().A.5米 B.6米 C.7米 D.8米二、填空题.12.升国旗时,某同学站在离旗杆底部24m 处行注目礼,当国旗升至旗杆顶端时,•该同学视线的仰角恰为30°,若双眼离地面1.5m,则旗杆高度为______m.(•用含根号的式子表示)13.在地面上一点,测得一电视塔尖的仰角为45°,沿水平方向,•再向塔底前进a米,又测得塔尖的仰角为60°,那么电视塔高为________.• • •14.•如图一铁路路基的横断面为等腰梯形ABCD,•根据图示数据得下底宽AD=______米.(第14题) (第15题)15.如图△ABC的顶点A、C的坐标分别是(0,4),(3,0),并且∠ACB=90°,∠B=•30°,则顶点B的坐标是________.16.如图,•燕尾槽的外口宽AD=•90mm,•深为70mm,•燕尾角为60•°,•则里口宽为________.(第16题) (第17题)17.如图,从高出海平面500m的直升飞机上,测得两艘船的俯角分别为45•°和30°,如果这两艘船一个在正东,一个在正西,那么它们之间的距离为______.三、解答题.18.甲、乙两船同时从港口O出发,甲船以16.1海里/小时的速度向东偏南35°方向航行,乙船向西偏南58°,方向航行,航行了两小时,甲船到达A处并观测到B处的乙船恰好在其正西方向,求乙船的速度v.(精确到0.1海里/小时)(参考数据:sin32°≈0.53,cos32°≈0.85,tan32°≈0.62,cot32°≈1.60)19.去年某省将地处A、B两地的两所大学合并成了一所综合性大学,•为了方便A、B两地师生的交往,学校准备在相距2千米的A、B两地之间修筑一条笔直公路(图中的线段AB),经测量,在A地的北偏东60°方向,B地的北偏西45°方向的C•处有一个半径为0.7千米的公园,问计算修筑的这条公路会不会穿出公园?为什么?答案:一、1.D 2.D 3.B 4.A 5.C 6.A 7.A 8.D 9.C 10.D 11.D二、12.83+32 13.33a米 14.29.215.(3316.(1403)mm 17.500(3m三、18.由题意可知:OA=16.1×2=32.2(海里).∠1=32°,∠2=58°.∴∠AOB=180°-(∠1+∠2)=180°-(32°+58°)=90°.由B在A的正西方向,可得:∠A=∠1=32°.又∵在Rt△AOB中,tanA=OB,OA∴OB=OA·tanA=32.2×tan32°=32.2×0.62=19.964(海里).OB=19.964÷2=9.982≈10.0(海∴v=2里/小时).即:乙船的速度约为10.0海里/小时. 19.过点C作CD⊥AB于D,,这条公路不会穿过公园.。
象限角和坐标方位角,简述两者关系

象限角和坐标方位角,简述两者关系如果知道了直线的方位角,就可以换算出它的象限角,反之,知道了象限也就可以推算出坐标方位角。
两者换算关系:第一象限α=R;第二象限α=180°-R;第三象限α=180°+R;第四象限α=360°-R。
坐标方位角α指的是以平行于X轴的方向为基准方向,于某边的一个端点,从基准方向顺时针转至该边的水平角度(0~360°)。
象限角R指从X方向顺时针或逆时针转至某直线的水平角度(0~90°)。
从坐标纵轴的北端或南端顺时针或逆时针起算至直线的锐角称
为坐标象限角。
其角值变化从0°~90°,为了表示直线的方向,应分别注明北偏东、北偏西或南偏东、南偏西。
如北东85°,南西47°等。
显然,如果知道了直线的方位角,就可以换算出它的象限角,反之,知道了象限也就可以推算出方位角。
方位角的解题技巧
方位角的解题技巧方位角是一个重要的地理概念,用于描述一个方向相对于北方的角度。
在解题时,掌握一些技巧可以帮助你更快速、准确地找到答案。
1. 理解基本概念:首先,要清楚方位角的定义。
方位角是从北方向开始,顺时针测量到目标方向的角度。
通常,方位角取值范围是0°到360°,其中0°或360°代表正北方向,90°代表正东方向,180°代表正南方向,270°代表正西方向。
2. 使用方位角图:在解决涉及方位角的问题时,可以绘制一个简单的方位角图。
这样可以帮助你直观地理解各个方向之间的关系,从而更容易找到答案。
3. 利用角度关系:方位角之间有一定的角度关系。
例如,东和南之间的夹角是90°,南和西之间的夹角是90°。
了解这些角度关系可以帮助你快速计算出某个方位角。
4. 注意角度的连续性:方位角是连续的,这意味着如果你从北方向开始测量一个角度,然后向东移动,下一个方向应该是东南。
同样地,从东南转向西南也是连续的。
理解这种连续性可以帮助你更准确地描述方向变化。
5. 应用在实际问题中:方位角不仅用于解决数学问题,还可以用于解决实际问题,如导航、气象观测等。
通过将理论知识应用于实际问题,你可以更好地理解和掌握方位角的概念。
6. 练习和巩固:最后,通过大量的练习来巩固你的方位角知识。
这可以通过解决各种方位角问题来实现,例如计算两个方向之间的夹角、确定某个物体的位置等。
通过掌握这些技巧,你可以更有效地解决涉及方位角的问题。
同时,不断练习和巩固也是提高方位角解题能力的关键。
九年级数学方位角知识点
九年级数学方位角知识点方位角是我们在解决与角度相关的问题时经常使用的一个概念。
它是与x轴的正方向之间的角度,顺时针方向为正,逆时针方向为负。
在九年级数学课程中,我们需要了解关于方位角的一些基本概念和应用。
一、方位角的定义和表示方位角可以通过一个与x轴的正方向之间的角度来进行表示。
例如,如果我们需要描述一个点在平面直角坐标系中的位置,我们可以使用方位角来表示。
对于点P(x,y),其中x和y表示点P在x轴和y轴上的坐标,则P的方位角θ可以通过以下公式来计算:θ = arctan (y/x)这里,arctan是反正切函数。
二、方位角的范围方位角的范围通常是以弧度为单位的。
在一圈中,方位角θ的取值范围为0到2π(rad)。
0对应于与x轴正向重合的方向,π/2对应于与y轴正向重合的方向,π对应于与x轴负向重合的方向,以此类推。
三、方位角的应用方位角可以在很多数学问题中发挥重要作用。
下面是一些具体的应用场景:1. 导航和航空导航:在导航和航空导航中,确定物体的方位是至关重要的。
通过计算方位角,我们可以确定目标物体与参考点之间的角度差,从而确定正确的方向。
2. 相位差和波的震动:在物理学中,方位角可以用于描述两个波之间的相位差。
它可以告诉我们两个波在时间上的偏移量。
3. 几何问题:在几何学中,我们常常需要计算点、直线和平面之间的相对位置。
方位角可以提供一个有效的方式来描述和计算这些关系。
4. 运动学和力学问题:方位角也在运动学和力学问题中起着重要作用。
它可以帮助我们计算物体的速度、加速度和力的分量。
四、方位角的计算方法计算方位角可以使用反正切函数,也可以使用三角函数来实现。
在实际问题中,根据具体情况选择最适合的方法。
另外,如果我们已知一个角的正弦或余弦值,也可以通过查阅三角函数表来计算方位角。
三角函数表中列出了常见角度对应的正弦、余弦和正切值。
五、方位角与坐标变换方位角还可以通过坐标变换来进行计算。
假设我们要将一个点P(x,y)绕原点逆时针旋转θ弧度,我们可以使用以下公式来计算旋转后的点P'的坐标:x' = x*cos(θ) - y*sin(θ)y' = x*sin(θ) + y*cos(θ)这个公式可以帮助我们在进行坐标变换时方便地计算新的坐标。
每个象限中坐标方位角与象限角的关系
每个象限中坐标方位角与象限角的关系下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!每个象限中坐标方位角与象限角的关系在平面直角坐标系中,角度可以通过不同的方式表示,包括方位角(极角)和象限角。
方位角计算公式.
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式第一象限(NE)=第二象限(SE)=-第三象限(SW)=+第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
难点方位角的概念和坐标方位角的推算

y
5.3 距离、方位角与坐标之间的关系
按不同象限分别讨论:
1 )当 AB 直线位于第Ⅰ象限时,即 XB-XA>0 和 YB-YA>0,坐标方位
角计算公式与上式相同 2 )当 AB 直线位于第Ⅱ象限时,即 XB-XA<0 和 YB-YA>0 ,坐标方位 角计算公式为:
α
YB YA +180° = arctan AB XB XA
重点
难点
方位角的概念和坐标方位角的推算。
定义:为了确定地面上两点之间的相对位置,除了量测
两点之间的水平距离外,还必须确定该直线与一基本
(标准)方向之间的水平角,这项工作称为直线定向。
5.1
三北方向
5.1.1 真子午线方向(真北方向)
+ 包含地球南北极的平面与地球表面的交线称为真子午线。 + 过地面某点的真子午线的切线方向,称为该点的真子午
5.3 距离、方位角与坐标之间的关系
3)当AB直线位于第象Ⅲ限时,即XB-XA<0和YB-YA<0,坐标方位 角计算公式为:
α AB=arctan YB YA +180°
XB XA
4)当AB直线位于第象Ⅳ限时,即XB-XA>0和YB-YA<0,坐标方位 角计算公式为: α AB=arctan
5.2 方位角与象限角
5.2.4 象限角
Байду номын сангаас
测量上有时用象限角来确定直线的方向。所谓象限角,就 是由标准方向的北端或南端起量至某直线所夹的锐角,常用 R 表示。 角值范围:0°~ 90°
由于象限角可自标准方向的北端量起,也可自其南端量起;
可以向东量,也可以向西量。所以象限角除注明角度的大小外,
直线的方位角和象限角

直线的象限角和方位角
• 确定某直线的方位角,首先应确定该地 区的标准指北方向。在测绘工作中,计 算方位角采用的标准方向通常有三种。
• (1)坐标纵轴(中央子午线)方向 • (2)真子午线方向 • (3)磁子午线方向
直线的方位角和象限角
二、象限角
➢在实际工作中,有时用象限角表示直线 的方向。一直线的象限角是指由坐标纵 线的北端或南端,顺时针或逆时针计算 到该直线的水平锐角。象限角的数值由 0~90°,用R表示。
直线的方位角和象限角
直线的方位角和象限角
一、方位角
➢绘制矿图经常需要确定两点间的相对位 置,确定相对位置时,不仅需要两点间 水平距离,还需要两点间的直线与标准 方向线之间的水平夹角。
➢在平面直角坐标系中,从坐标纵轴的指 北方向起,顺时针旋转量至某一直线的 水平角度,称为该直线的坐标方位角, 简称方位角。
感谢您
初中数学方位角的讲解教案
初中数学方位角的讲解教案1. 让学生理解方位角的定义,掌握方位角的判定和表示方法。
2. 培养学生运用方位角解决实际问题的能力。
3. 培养学生的空间想象力,提高学生的数学素养。
二、教学内容1. 方位角的定义及其表示方法。
2. 方位角的判定方法。
3. 方位角在实际问题中的应用。
三、教学重点与难点1. 重点:方位角的定义、表示方法及其应用。
2. 难点:方位角的判定方法。
四、教学过程1. 导入:通过讲解生活中的方向概念,如东、南、西、北等,引出方位角的概念。
2. 新课讲解:(1)方位角的定义:以正北为基准,顺时针或逆时针旋转到目标方向所成的角。
(2)方位角的表示方法:用度数表示,如北偏东30°表示从正北顺时针旋转30°到目标方向。
(3)方位角的判定方法:以正北为基准,观察目标方向与正北方向的夹角,判断方位角的大小。
3. 实例分析:通过具体实例,让学生学会判断方位角,并运用方位角解决实际问题。
4. 练习与巩固:设计一些练习题,让学生独立完成,检验学生对方位角的掌握程度。
5. 课堂小结:总结本节课所学内容,强调方位角的概念、表示方法和判定方法。
6. 布置作业:设计一些作业题,让学生课后巩固所学知识。
五、教学策略1. 采用直观演示法,让学生通过观察、实践,掌握方位角的概念和表示方法。
2. 采用实例分析法,让学生学会运用方位角解决实际问题。
3. 采用练习法,让学生在实践中巩固所学知识。
4. 注重学生个体差异,给予学生充分的思考时间和空间,鼓励学生提出问题,培养学生的探究精神。
六、教学评价1. 学生能准确理解方位角的定义,熟练掌握方位角的表示方法。
2. 学生能运用方位角解决实际问题,体现数学的应用价值。
3. 学生在课堂表现积极,参与度高,能与老师和同学进行有效互动。
4. 学生课后作业完成情况良好,巩固所学知识。
象限角和坐标方位角的关系
象限角和坐标方位角的关系
象限角和坐标方位角都是描述角度的概念,它们之间存在以下关系:
1.象限角是以正x 轴为起点,逆时针旋转的角度,它的度数范围是0°~ 360°。
2.坐标方位角是以正x 轴为起点,逆时针旋转的角度,它的度数范围是-180°~ 180°。
3.当角度为正时,象限角和坐标方位角的值相同;当角度为负时,坐标方位角的值等于360°加上象限角的度数。
4.在第一象限中,象限角和坐标方位角的值相同;在第二、三象限中,坐标方位角等于象限角加上180°;在第四象限中,坐标方位角等于象限角减去180°。
因此,可以通过象限角和坐标方位角之间的转换,方便地描述平面直角坐标系中的角度。
建筑工程测量:象限角与方位角的关系

《建筑工程测量》
象限角与方位角的关系
一、象限角的概念
象限角由坐标纵轴的北端或南端起,顺时针或逆时针旋转至该直线方向所形成的锐角,同时加注出象限名称的角。
象限角用R表示,角值范围为0°~90°。
这里有四个要点,第一是北端或南段,第二是顺时针或逆时针,第三是锐角,第四是需要加注象限名称。
这四个要点均与方位角不同。
按照象限角的定义,依次绘制出象限角的大小,如图1。
图1 象限角的绘制
二、象限角R与方位角α的关系
首先,我们回顾一下方位角的概念,从坐标纵轴的北端顺时针旋转至该直线方向所形成的水平夹角即为方位角。
方位角用α表示,其取值范围是 0~360,而象限角就是个锐角,第一象限,二者相等;第二象限,方位角在90°~180°之间,α=180°— R;第三象限,方位角在180°~270°之间,α=180°+ R;第四象限,方位角在270°~360°,α=360°— R。
图2 象限角与方位角的关系。
简述方位角和象限角的定义
简述方位角和象限角的定义方位角和象限角是在数学中常用的角度测量方式,用于描述物体或点在平面上的位置关系。
本文将对方位角和象限角的定义进行简述。
一、方位角的定义方位角是指从参考方向(通常为正北方向)起逆时针旋转到某个点的角度。
它是一个以正北方向为基准的角度,通常用度数来表示,范围为0°到360°。
其中,0°表示正北方向,90°表示正东方向,180°表示正南方向,270°表示正西方向。
方位角的测量方式主要有两种:一种是以真北或磁北为参照,另一种是以正南或正北为参照。
以真北为参照的方位角称为真方位角,以磁北为参照的方位角称为磁方位角。
二、象限角的定义象限角是指一个角位于平面直角坐标系的第几象限中。
平面直角坐标系将平面分为四个象限,分别是第一象限、第二象限、第三象限和第四象限。
第一象限是指位于x轴正方向和y轴正方向之间的区域;第二象限是指位于x轴负方向和y轴正方向之间的区域;第三象限是指位于x轴负方向和y轴负方向之间的区域;第四象限是指位于x轴正方向和y轴负方向之间的区域。
象限角的测量方式是通过判断角的正负,以及x轴和y轴的正负来确定角位于哪个象限。
例如,如果角的正负为正,且x轴和y轴的正负分别为正和正,则该角位于第一象限;如果角的正负为负,且x轴和y轴的正负分别为负和正,则该角位于第三象限。
三、方位角与象限角的关系方位角和象限角是描述角度位置的两种方式,它们之间存在一定的关系。
在平面直角坐标系中,第一象限的角度范围是0°到90°,第二象限的角度范围是90°到180°,第三象限的角度范围是180°到270°,第四象限的角度范围是270°到360°。
可以发现,第一象限的角度范围对应的是方位角为0°到90°的范围;第二象限的角度范围对应的是方位角为90°到180°的范围;第三象限的角度范围对应的是方位角为180°到270°的范围;第四象限的角度范围对应的是方位角为270°到360°的范围。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直线定向
确定地面上两点之间的相对位置,除了需要测定两点之间的水平距离外,还需确定两点所连直线的方向。
一条直线的方向,是根据某一标准方向来确定的。
确定直线与标准方向之间的关系,称为直线定向。
一、标准方向
1.真子午线方向
通过地球表面某点的真子午线的切线方向,称为该点的真子午线方向。
真子午线方向可用天文测量方法测定。
2.磁子午线方向
磁子午线方向是在地球磁场作用下,磁针在某点自由静止时其轴线所指的方向。
磁子午线方向可用罗盘仪测定。
3.坐标纵轴方向
在高斯平面直角坐标系中,坐标纵轴线方向就是地面点所在投影带的中央子午线方向。
在同一投影带内,各点的坐标纵轴线方向是彼此平行的。
二、方位角
测量工作中,常采用方位角表示直线的方向。
从直线起点的标准方向北端起,顺时针方向量至该直线的水平夹角,称为该直线的方位角。
方位角取值范围是0˚~360˚。
因标准方向有真子午线方向、磁子午线方向和坐标纵轴方向之分,对应的方位角分别称为真方位角(用A表示)、磁方位角(用A m表示)和坐标方位角(用α表示)。
三、三种方位角之间的关系
因标准方向选择的不同,使得一条直线有不同的方位角,如图4-19所示。
过1点的真北方向与磁北方向之间的夹角称为磁偏角,用δ表示。
过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角,用γ表示。
δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。
同一直线的三种方位角之间的关系为:
(4-14);
(4-15);
(4-16)
四、坐标方位角的推算
1.正、反坐标方位角
如图4-20所示,以A为起点、B为终点的直线AB的坐标方位角αΑB,称为直线AB的坐标方位角。
而直线BA的坐标方位角αBA,称为直线AB的反坐标方位角。
由图4-20中可以看出正、反坐标方位角间的关系为:
(4-17)2.坐标方位角的推算
在实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。
如图4-21所示,已知直线12的坐标方位角α12,观测了水平角β2和β3,要求推算直线23和直线34的坐标方位角。
由图4-21可以看出:
因β2在推算路线前进方向的右侧,该转折角称为右角;β3在左侧,称为左角。
从而可归纳出推算坐标方位角的一般公式为:
(4-18)
(4-19)计算中,如果α前>360˚,应自动减去360°;如果α前<0˚,则自动加上360˚。
五、象限角
1.象限角
由坐标纵轴的北端或南端起,沿顺时针或逆时针方向量至直线的锐角,称为该直线的象限角,用R表示,其角值范围为0˚~90˚。
如图4-22所示,直线01、02、03和04的象限角分别为北东R01、南东R02、南西R03和北西R04。
2.坐标方位角与象限角的换算关系
由图4-23可以看出坐标方位角与象限角的换算关系:
在第Ⅰ象限,R=α在第Ⅱ象限,R=180°-α
在第Ⅲ象限,R=α-180°在第Ⅳ象限,R=360°-α
不同象限坐标增量的符号
坐标方位角及其所在
之符号之符号象限
++(第一象限)
-+
(第二象限)
--
(第三象限)
+-
(第四象限。