单片机指示灯和数码管的中断控制实验报告
信号灯单片机实训报告

一、实训背景随着城市化进程的加快,交通流量日益增大,交通信号灯系统作为城市交通管理的重要手段,对于提高道路通行效率、保障交通安全具有至关重要的作用。
为了让学生更好地了解和掌握单片机在交通信号灯控制系统中的应用,我们进行了信号灯单片机实训。
二、实训目的1. 熟悉单片机的硬件结构和编程方法。
2. 掌握交通信号灯控制系统的设计原理和实现方法。
3. 培养学生的动手能力和创新意识。
三、实训内容1. 硬件设计本实训选用51单片机作为主控单元,利用P1口输出控制红、黄、绿三色LED 灯的亮灭。
同时,通过P2口连接4个7段数码管,用于显示倒计时时间。
硬件电路主要包括以下部分:- 51单片机- 4个LED灯(红、黄、绿)- 4个7段数码管- 电阻、电容等元件2. 软件设计软件设计主要包括以下功能:- 红绿灯控制:根据预设的时间,控制红、黄、绿三色LED灯的亮灭。
- 倒计时显示:在数码管上显示倒计时时间。
- 中断控制:通过外部中断实现紧急情况下的信号灯控制。
软件设计流程如下:1. 初始化硬件资源,包括单片机端口、LED灯和数码管。
2. 设置定时器,实现定时中断。
3. 在定时中断服务程序中,根据预设的时间控制红、黄、绿三色LED灯的亮灭。
4. 在数码管上显示倒计时时间。
5. 设置外部中断,实现紧急情况下的信号灯控制。
四、实训过程1. 硬件搭建首先,根据设计电路图,将51单片机、LED灯、数码管等元件焊接在电路板上。
注意,在焊接过程中要注意元件的极性,避免损坏元件。
2. 软件编程使用C语言编写程序,实现信号灯控制功能。
在编程过程中,注意以下要点:- 熟悉单片机的指令系统和寄存器。
- 掌握定时器、中断等功能的实现方法。
- 注意程序的逻辑性和可读性。
3. 调试与测试将编写好的程序烧录到单片机中,进行调试和测试。
在测试过程中,观察信号灯的亮灭情况、倒计时时间的显示以及紧急情况下的信号灯控制。
五、实训结果经过调试和测试,信号灯单片机实训取得了以下成果:1. 成功实现了红、黄、绿三色LED灯的控制,并根据预设的时间进行倒计时显示。
数码管动态显示实验报告
一、实验目的1. 掌握数码管动态扫描显示的原理和编程实现方法;2. 熟悉单片机与数码管之间的接口连接;3. 学会使用定时器中断控制数码管的动态显示;4. 培养动手能力和问题解决能力。
二、实验原理数码管动态显示是通过单片机控制多个数码管同时显示不同的数字或字符,利用人眼的视觉暂留效应,实现快速切换显示内容,从而在有限的引脚数下显示更多的信息。
实验中,我们采用动态扫描的方式,依次点亮数码管,通过定时器中断控制扫描速度。
三、实验器材1. 单片机开发板(如51单片机、AVR单片机等);2. 数码管(共阳/共阴自选);3. 连接线;4. 电阻;5. 实验台;6. 编译器(如Keil、IAR等)。
四、实验步骤1. 设计电路图:根据实验要求,设计单片机与数码管的连接电路图,包括数码管的段码、位选信号、电源等。
2. 编写程序:使用C语言或汇编语言编写程序,实现数码管的动态显示功能。
(1)初始化:设置单片机的工作模式、定时器模式、端口方向等。
(2)显示函数:编写显示函数,实现数码管的点亮和熄灭。
(3)定时器中断服务程序:设置定时器中断,实现数码管的动态扫描。
3. 编译程序:将编写的程序编译成机器码。
4. 烧录程序:将编译后的程序烧录到单片机中。
5. 连接电路:将单片机与数码管连接好,包括数码管的段码、位选信号、电源等。
6. 运行实验:打开电源,观察数码管的显示效果。
五、实验结果与分析1. 实验结果:数码管按照预期实现了动态显示功能,依次点亮每位数码管,并显示出不同的数字或字符。
2. 分析:(1)通过调整定时器中断的周期,可以改变数码管的扫描速度,从而控制显示效果。
(2)在编写显示函数时,要考虑到数码管的共阳/共阴特性,选择合适的点亮和熄灭方式。
(3)在实际应用中,可以根据需要添加其他功能,如显示时间、温度等。
六、实验总结1. 通过本次实验,掌握了数码管动态显示的原理和编程实现方法。
2. 熟悉了单片机与数码管之间的接口连接,提高了动手能力。
单片机原理及应用实验报告
《单片机原理及应用》实验报告姓名:学号:班级:应用物理指导教师:日期:实验1 计数显示器一、实验目的熟悉51单片机的基本输入输出应用,掌握Proteus模块的原理图绘图方法及单片机系统仿真运行方法二、实验原理由共阴极数码管LED1和LED2、P0口、P2口,上拉电阻RP1及Vcc组成的输出电路;由按钮开关BUT、P3.7和接地点组成的输入电路,该电路在编程软件的配合下,可实现计数显示功能:可统计按钮BUT的按压次数,并将按压结果以十进制数形式显示出来;当显示值达到99后可自动从1开始,无限循环。
三、实验内容(1)观察Proteus模块的软件结构,熟悉菜单栏、工具栏、对话框等基本单元功能(2)学会选择元件、画导线、修改属性等基本操作(3)学会可执行文件加载及程序仿真运行方法(4)验证计数显示器的功能四、实验要求提交实验报告并包括如下内容:电路原理图、电路原理分析、仿真运行截图及实验小结1.实验原理图2.仿真运行截图3.实验小结通过这次实验让我认识了kell和proteus软件的基本功能,学会了用kell编写程序用proteus仿真运行。
在这次实验中同时也遇到了很多问题。
比如因为第一次使用这两个软件对界面还不太熟悉,浪费了很多的时间也产生了很多错误,但之后与同学们的交流过程中,慢慢的对这两个软件有了更深入的了解,在后期仿真的时候才能得心应手的处理问题。
这个计数显示器的实验让我进一步了解了单片机与数码管的魅力,看到了电子元件的神奇之处,只要按动按键就能让数码管的数字逐次加一,这大大激发了我的学习单片机兴趣,这次实验也会成为我以后学习单片机的奠基石,因为它打开了我认识单片机的大门,让我认识到了单片机的魅力,并让我沉浸其中。
实验2 指示灯开关控制器一、实验目的学习51单片机I/O口基本输入输出功能,掌握汇编语言的编程与调试方法。
二、实验原理输入电路由外接在P1口的8只拨动开关组成;输出电路由外接在P2口的8只低电平驱动的发光二极管组成。
单片机原理实验报告(详细)

湖南城市学院实验报告2018-2019 学年上学期姓名:***班级学号:******实验课程:单片机原理及应用实验室名称:电子工程实验室湖南城市学院信息与电子工程学院实验中心印制实验项目名称:实验一指示灯和开关控制器实验一、实验目的及要求1、学习51单片机I/O基本输入/输出功能,掌握汇编语言的编程与调试方法;2、熟悉proteus软件,了解软件的结构组成与功能;3、学会在ISIS模块中进行汇编程序录入、编译和调试;4、理解单片机程序控制原理,实现指示灯/开关控制器的预期功能。
二、实验原理实验电路原理图如图1所示,图中输入电路由外接在P3口的8只拨动开关组成;输出电路由外接在P2口的8只低电平驱动的发光二极管组成。
此外,还包括时钟电路、复位电路和片选电路。
图1 实验原理图在编程软件的配合下,要求实现如下指示灯/开关控制功能:程序启动后,8只发光二极管先整体闪烁3次(即亮→暗→亮→暗→亮→暗,间隔时间以肉眼可观察到为准),然后根据开关状态控制对应发光二极管的灯亮状态,即开关闭合相应灯亮,开关断开相应灯灭,直至停止程序运行。
软件编程原理为:(1)8只发光二极管整体闪烁3次亮灯:向P2口送入数值0;灭灯:向P2口送入数值0FFH;闪烁3次:循环3次;闪烁快慢:由软件延时时间决定。
(2)根据开关状态控制灯亮或灯灭开关控制灯:将P3口(即开关状态)内容送入P2口;无限持续:无条件循环。
程序流程图如图2所示。
图2 实验程序流程图三、实验仪器设备及装置(1)硬件:电脑一台;(2)仿真软件:Proteus;(3)编程软件Keil uVision4。
其中,仿真软件ISIS元件清单如表1所示。
表1 仿真软件ISIS元件清单四、实验内容和步骤(一)实验内容:(1)熟悉ISIS模块的汇编程序编辑、编译与调试过程;(2)完成实验的汇编语言的设计与编译;(3)练习ISIS汇编程序调试方法,并最终实现实验的预期功能。
(二)实验步骤:(1)提前阅读与实验相关的阅读材料;(2)参考指示灯/开关控制器的原理图和实验的元件清单,在ISIS中完成电路原理的绘制;(3)参考程序流程图在Keil uVision4中编写和编译汇编语言程序;(4)利用ISIS的汇编调试功能检查程序的语法和逻辑错误;(5)观察仿真结果,检验与电路的正确性。
单片机实验报告——LED数码管显示实验

单⽚机实验报告——LED数码管显⽰实验(此⽂档为word格式,下载后您可任意编辑修改!)《微机实验》报告LED数码管显⽰实验指导教师:专业班级:姓名:学号:联系⽅式:⼀、任务要求实验⽬的:理解LED七段数码管的显⽰控制原理,掌握数码管与MCU的接⼝技术,能够编写数码管显⽰驱动程序;熟悉接⼝程序调试⽅法。
实验内容:利⽤C8051F310单⽚机控制数码管显⽰器基本要求:利⽤末位数码管循环显⽰数字0-9,显⽰切换频率为1Hz。
提⾼要求:在4位数码管显⽰器上依次显⽰当天时期和时间,显⽰格式如下:yyyy (年份)mm.dd(⽉份.⽇).asm;Description: 利⽤末位数码管循环显⽰数字0-9,显⽰切换频率为1Hz。
;Designed by:gxy;Date:2012117;*********************************************************$include (C8051F310.inc)ORG 0000H ;复位⼊⼝AJMP MAINORG 000BH ;定时器0中断⼊⼝AJMP TIME0MAIN: ACALL Init_Device ;初始化配置MOV P0,#00H ;位选中第⼀个数码管MOV R0,#00H ;偏移指针初值CLR PSW.1 ;标志位清零SETB EA ;允许总中断SETB ET0 ;允许定时器0中断MOV TMOD,#01H ;定时器0选⼯作⽅式1MOV TH0,#06HMOV TL0,#0C6H ;赋初值,定时1sLOOP: MOV A,R0ADD A,#0BH ;加偏移量MOVC +PC ;查表取,段码MOV P1,A ;段码给P1显⽰SETB TR0 ;开定时LOOP1: JNB PSW.1,LOOP1 ;等待中断CLR PSW.1INC R0 ;偏移指针加⼀CJNE R0,#0AH,LOOP3MOV R0,#00H ;偏移指针满10清零AJMP LOOP ;返回DB 0FCH,60H,0DAH,0F2H,66H ;段码数据表:0、1、2、3、4 DB 0B6H,0BEH,0E0H,0FEH,0F6H; 5、6、7、8、9 ;***************************************************************** ; 定时器0中断;***************************************************************** TIME0: SETB PSW.1 ;标志位置⼀MOV TH0,#06H ;定时器重新赋值MOV TL0,#0C6HLOOP3: CLR TR0 ;关定时RETI;***************************************************************** ;初始化配置;***************************************************************** PCA_Init:anl PCA0MD, #0BFhmov PCA0MD, #000hretTimer_Init:mov TMOD, #001hmov CKCON, #002hretPort_IO_Init:; P0.0 - Unassigned, Open-Drain, Digital ; P0.1 - Unassigned, Open-Drain, Digital ; P0.2 - Unassigned, Open-Drain, Digital ; P0.3 - Unassigned, Open-Drain, Digital ; P0.4 -Unassigned, Open-Drain, Digital ; P0.5 - Unassigned, Open-Drain, Digital ; P0.6 - Unassigned, Open-Drain, Digital ; P0.7 - Unassigned, Open-Drain, Digital ; P1.0 - Unassigned, Open-Drain, Digital ; P1.1 - Unassigned, Open-Drain, Digital ; P1.2 - Unassigned, Open-Drain, Digital ; P1.3 - Unassigned, Open-Drain, Digital ; P1.4 - Unassigned, Open-Drain, Digital ; P1.5 - Unassigned, Open-Drain, Digital ; P1.6 - Unassigned, Open-Drain, Digital ; P1.7 - Unassigned, Open-Drain, Digital ; P2.0 - Unassigned, Open-Drain, Digital ; P2.1 -Unassigned, Open-Drain, Digital ; P2.2 - Unassigned, Open-Drain, Digital ; P2.3 - Unassigned, Open-Drain, Digital mov XBR1, #040hretInterrupts_Init:mov IE, #002hretInit_Device:lcall PCA_Initlcall Timer_Initlcall Port_IO_Initlcall Interrupts_Initretend提⾼部分:;*********************************************************;Filename: shumaguan2.asm;Description:在4位数码管显⽰器上依次显⽰当天时期和时间,显⽰格式如下:; 2012 (年份); 12.07(⽉份.⽇); 12.34(⼩时.分钟);Designed by:gxy;Date:2012117;*********************************************************$include (C8051F310.inc)ORG 0000HAJMP MAINORG 000BHAJMP TIME0MAIN: ACALL Init_DeviceMOV R0,#00H ;⽤于位选MOV R1,#00H ;⽤于段选MOV R2,#22H ;置偏移量,⽤于控制模式MOV R4,#8MOV R5,#250CLR PSW.1 ;标志位清零SETB EA ;允许总中断SETB ET0 ;允许定时器0中断MOV TMOD,#01H ;定时器0选⼯作⽅式1MOV TH0,#0FFHMOV TL0,#0C0H ;定时器赋初值1msBACK: MOV P0,R0 ;位选MOV A,R0ADD A,#40H ;选下⼀位MOV R0,AMOV A,R1ADD A,R2 ;加偏移量MOVC +PC ;查表取段码MOV P1,A ;段码给P1显⽰LOOP: SETB TR0 ;开定时HERE: JNB PSW.1,HERE ;等待中断CLR PSW.1DJNZ R5,BACKMOV R5,#250DJNZ R4,BACKMOV R4,#8 ;循环2000次(2s)MOV A,R2ADD A,#04H ;偏移量加04H,到下⼀模式段码初值地址 MOV R2,ACJNE R2,#2EH,LOOP2MOV R2,#22H ;加三次后偏移量回到初值LOOP2: AJMP BACK ;返回进⼊下⼀模式;段码数据表:DB 0DAH,60H,0FCH,0DAH ; 2102DB 0E0H,0FCH,61H,60H ; 701. 1DB 66H,0F2H,0DBH,60H ; 432. 1;*****************************************************************; 定时器0中断;***************************************************************** TIME0: MOV TH0,#0FFH MOV TL0,#0C0HCLR TR0SETB PSW.1INC R1 ;偏移指针加⼀CJNE R1,#04H,LOOPMOV R1,#00H ;偏移指针满04H清零RETI;***************************************************************** ; 初始化配置;***************************************************************** PCA_Init:anl PCA0MD, #0BFhmov PCA0MD, #000hretTimer_Init:mov TMOD, #001hmov CKCON, #002hretPort_IO_Init:; P0.0 - Unassigned, Open-Drain, Digital; P0.1 - Unassigned, Open-Drain, Digital; P0.2 - Unassigned, Open-Drain, Digital; P0.3 - Unassigned, Open-Drain, Digital; P0.4 - Unassigned, Open-Drain, Digital; P0.5 - Unassigned, Open-Drain, Digital; P0.6 - Unassigned, Open-Drain, Digital; P0.7 - Unassigned, Open-Drain, Digital; P1.0 - Unassigned, Open-Drain, Digital; P1.1 - Unassigned, Open-Drain, Digital; P1.2 - Unassigned, Open-Drain, Digital; P1.3 - Unassigned, Open-Drain, Digital; P1.4 - Unassigned, Open-Drain, Digital; P1.5 - Unassigned, Open-Drain, Digital; P1.6 - Unassigned, Open-Drain, Digital; P1.7 - Unassigned, Open-Drain, Digital; P2.0 - Unassigned, Open-Drain, Digital; P2.1 - Unassigned, Open-Drain, Digital; P2.2 - Unassigned, Open-Drain, Digital; P2.3 - Unassigned, Open-Drain, Digitalmov XBR1, #040hretInterrupts_Init:mov IE, #002hretInit_Device:lcall PCA_Initlcall Timer_Initlcall Port_IO_Initlcall Interrupts_Initretend六、程序测试⽅法与结果、软件性能分析软件调试总体截图:基础部分:软件运⾏时,我们发现P0端⼝为00H,P1端⼝以依次为FCH、60H、DAH、F2H、66H、B6H、BEH、E0H、FEH、F6H。
单片机实验报告四 外部中断实验

南昌大学实验报告学生姓名:学号:专业班级:实验类型:⃞验证⃞综合⃞设计⃞创新实验日期:2019. 4.30 实验成绩:实验四外部中断实验(一)实验目的1.掌握单片机外部中断原理;2.掌握数码管动态显示原理。
(二)设计要求1.使用外部中断0和外部中断1;2.在动态数码管上显示中断0次数,中断1用作次数清0,数码管采用74HC595驱动。
(三)实验原理1.中断:计算机执行主程序过程中,由于临时重要事件,需要暂停当前程序的运行,转到中断服务程序去处理临时事件,处理完后又返回原程序的断点处继续运行。
图1STC15单片机的中断系统包含21个中断源,2个中断优先级,二级中断服务嵌套,中断允许寄存器IE、IE2和INT_CLKO控制中断允许。
中断优先级寄存器IP、IP2管理中断优先级。
同优先级中断同时提出中断请求时,由内部的查询逻辑确定响应次序。
中断请求源中的外部中断0(INT0)和外部中断1(INT1)详述如下:1)外部中断0(INT0):中断信号由P3.2引脚输入。
通过IT0来设置中断请求的触发方式。
当IT0为“1”时,外部中断0为下降沿触发;当IT0为“0”时,无论是上升沿还是下降沿,都会引发外部中断0.一旦输入信号有效,则置位IE0标志,向CPU申请终端。
2)外部中断1(INT1):中断信号由P3.3引脚输入。
通过IT1来设置中断请求的触发方式。
当IT1为“1”时,外部中断0为下降沿触发;当IT1为“0”时,无论是上升沿还是下降沿,都会引发外部中断0.一旦输入信号有效,则置位IE0标志,向CPU申请终端。
2.LED数码管是显示数字和字母的常见显示器件,由8个发光二极管构成,结构如图2:图2段码:a、b、c、d、e、f、g、dp段的二进制代码(a为最低位),控制显示字型。
位选:公共端com,控制数码管是否显示。
3.数码管动态显示原理:任何时刻只有一个数码管处于显示状态,单片机采用“扫描”方式控制各个数码管轮流显示,通常将所有数码管段码线的相应段并联在一起,由一个8位I/O 端口控制。
51单片机实训报告

51单片机实训报告一、引言51单片机是一种常用的微控制器,具有体积小、功耗低、功能强大等优点,广泛应用于各种电子设备中。
本文将介绍本次实训的目标、实验步骤、实验结果以及实训中遇到的问题及解决方案。
二、实训目标本次实训的目标是通过51单片机的学习和实践,掌握单片机的基本原理和编程技巧。
具体来说,我们需要实现以下几个功能:1. 熟悉51单片机的硬件组成和工作原理;2. 学习使用Keil C编译器进行单片机程序的编写和调试;3. 掌握基本的输入输出控制方法,如LED灯的控制、数码管的显示等;4. 学习使用定时器、中断等功能模块,实现一些实际应用,如蜂鸣器的发声、电机的控制等。
三、实验步骤1. 硬件准备:将51单片机与外围电路进行连接,如连接LED灯、数码管、蜂鸣器等;2. 编写程序:使用Keil C编译器编写相应的程序,包括引入头文件、定义宏、声明变量、编写主函数等;3. 调试程序:将程序下载到51单片机中,通过单片机的调试功能进行程序的调试,排除可能存在的错误;4. 运行程序:将调试好的程序运行在51单片机上,观察实验结果是否符合预期。
四、实验结果在本次实训中,我们顺利完成了以下几个实验:1. LED灯闪烁:通过控制51单片机的输出口,使LED灯以一定频率进行闪烁;2. 数码管显示:通过控制51单片机的输出口,使数码管显示指定的数字或字符;3. 蜂鸣器发声:通过控制51单片机的输出口,产生一定频率的方波信号,使蜂鸣器发出相应的声音;4. 电机控制:通过控制51单片机的输出口,控制电机的转动方向和速度。
五、实训中遇到的问题及解决方案在实训过程中,我们遇到了一些问题,但通过团队的共同努力和老师的指导,最终都得到了解决。
下面列举了其中的几个问题及解决方案:1. 问题:LED灯无法闪烁;解决方案:检查LED灯的连接是否正确,确认是否存在接触不良或短路等问题。
2. 问题:数码管无法正常显示;解决方案:检查数码管的连接是否正确,确认是否存在引脚连接错误或接触不良等问题。
单片机实验总结范文

一、实验背景随着科技的不断发展,单片机技术在各个领域得到了广泛的应用。
为了更好地掌握单片机原理和应用,我们进行了一系列的实验,以下是我对本次单片机实验的总结。
二、实验内容本次实验主要围绕以下几个方面展开:1. 单片机最小系统搭建:通过学习单片机基本原理,我们搭建了单片机最小系统,了解了单片机的基本工作原理。
2. 数码管显示实验:学习了数码管的原理,掌握了数码管显示的基本方法,实现了数字的动态显示。
3. 中断控制实验:了解了中断的概念,掌握了中断的编程方法,实现了数码管的中断控制。
4. 串口通信实验:学习了串口通信的基本原理,掌握了串口通信的编程方法,实现了单片机之间的数据交换。
5. 定时器实验:了解了定时器的原理,掌握了定时器的编程方法,实现了单片机的定时功能。
三、实验过程1. 实验一:单片机最小系统搭建在指导老师的帮助下,我们按照电路图搭建了单片机最小系统,并验证了系统的正常工作。
2. 实验二:数码管显示实验通过学习数码管的原理,我们编写了相应的程序,实现了数字的动态显示。
3. 实验三:中断控制实验我们学习了中断的概念,并编写了中断服务程序,实现了数码管的中断控制。
4. 实验四:串口通信实验我们学习了串口通信的基本原理,并编写了串口通信程序,实现了单片机之间的数据交换。
5. 实验五:定时器实验我们了解了定时器的原理,并编写了定时器程序,实现了单片机的定时功能。
四、实验心得1. 通过本次实验,我对单片机的基本原理和应用有了更深入的了解。
2. 在实验过程中,我学会了如何搭建单片机最小系统,掌握了数码管、中断、串口通信和定时器等模块的编程方法。
3. 在实验过程中,我遇到了许多问题,通过查阅资料、请教老师和同学,我学会了如何解决这些问题,提高了自己的动手能力和解决问题的能力。
4. 本次实验让我认识到理论与实践相结合的重要性,只有将所学知识运用到实际中,才能真正掌握单片机技术。
五、总结本次单片机实验让我受益匪浅,通过实验,我不仅掌握了单片机的基本原理和应用,还提高了自己的动手能力和解决问题的能力。
利用8259A中断实现LED灯和数码管显示实验

实验三:利用8259A中断实现LED灯和数码管显示实验安全0901 王宇航 09283020实验报告1.实验目的:了解8259中断控制器的基本使用,掌握中断程序编程技术。
同时使同学掌握中断和其它接口芯片配合来完成某一特定任务的方法。
2.实验步骤:8254A的OUT1输出接到8259A的MIR5上,每秒产生一次中断信号向8259A发出中断请求,在中断程序里将连接在8255A口的LED灯按照中断次数二进制点亮(即中断一次L0亮,中断两次L1亮,中断三次L1L0亮,中断四次L2亮……)。
同时在数码管低位上显示中断次数。
满10次后停止。
1.8254A在主程序中初始化。
CLK0工作在方式3,则控制字为00110110B,计数常数设为1000;CLK1工作在方式3,则控制字为01110110B,计数常数设为1000,则OUT1输出为1HZ 的方波。
2.8255A在使用前需要在主程序中初始化。
A口方式0输出,B口方式0输入,则控制字为10000011B。
3.8259A不用初始化,但在程序中需要包含以下几个部分:(1)8259A的MIR5对应的中断向量号为35H,需用此来设置中断入口地址。
(2)设置中断入口地址之后,需设置中断屏蔽字OCW1,使IR5请求被允许,其他请求被禁止。
(3)中断服务程序结束之前写OCW2,送中断结束命令EOI。
4.中断服务程序的主要功能是LED指示灯和数码管显示。
图3-1 实验连线图注意:实验系统的主8259A的片选信号为20H。
3.实验代码:.Model small.386DATA SEGMENTDATA0 DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ;分别对应字符0-9 COUNT DB 10 ;计数值为10DATA ENDSCODE SEGMENTASSUME CS:CODE,DS:DATASTART:MOV AX,DATAMOV DS,AX ;DS装入段基址LEA SI,DA TA0 ;取操作数DA TA0的16位偏移地址送到寄存器SI中 ;8254初始化MOV DX,203H ;8254命令口MOV AL,00110110B ;控制字--0通道、方式3(方波发生器)、二进制计数 OUT DX,AL ;将控制字写入命令口MOV DX,200H ;0通道的数据口MOV AX,1000 ;计数常数=1000OUT DX,AL ;先写入低字节MOV AL,AHOUT DX,AL ;再写入高字节MOV DX,203H ;8254命令口MOV AL,01110110B ;控制字1通道、方式3(方波发生器)、二进制计数 OUT DX,ALMOV DX,201H ;1通道的数据口MOV AX,1000 ;计数常数=1000OUT DX,ALMOV AL,AHOUT DX,AL ;8255初始化MOV DX,213H ;8255命令口MOV AL,10000011B ;8255控制字--A口方式0输出,B口方式0输入OUT DX,AL ;将控制字写入命令口;中断入口地址设置(用串指令)CLI ;关中断MOV AX,0MOV ES,AX ;置附件段基地址为0MOV DI,4*35H ;置附件段偏移地址到DIMOV AX,OFFSET INT_35 ;置中断程序首地址的偏移量到AXCLDSTOSW ;填首地址的偏移量到中断地址表MOV AX,SEG INT_35 ;置中断程序的段基地址到AXSTOSW ;填段基地址到中断地址表IN AL,21H ;读中断屏蔽寄存器IMRAND AL,11011111B ;设置中断屏蔽字OCW1,IR5请求被允许,其他请求被禁止 OUT 21H,AL ;将OCW1写入IMR中STI ;开中断WAIT:CMP COUNT,10 ;判断10次中断是否结束JNZ WAIT ;未结束,等待CLI ;10次中断后,关中断MOV AH,4CH ;结束,返回DOSINT 21H;延时程序DELAY PROCPUSH CX ;保护现场MOV CX,100H ;延时时间为处理一次CX自减1的时间乘以100HDELAY1: LOOP DELAY1POP CX ;恢复现场RET ;返回到调用处,继续执行DELAY ENDP;中断服务程序INT_35 PROCPUSH DX ;保护现场PUSH AXPUSH CXCLI ;关中断MOV AX,DATAMOV DS,AXINC COUNT ;中断次数加1MOV AL,COUNT ;将中断次数写入AL中MOV DX,210H ;8255数据口OUT DX,AL ;将中断次数输出到LED显示灯MOV CX,680HCMP COUNT,10JB GOON-randomirandom; ;低于10时跳转到GOONCMP COUNT,10JNZ L1 ;不等于10(此处即大于10)时跳转到L1 SUB SI,9 ;第10次中断时SI减去9,即归0L1:MOV AL,[SI] ;查表,对应0-9MOV DX,220H ;地址译码器连接六位数码管电路的数据口OUT DX,ALMOV DX,221H ;数据口MOV AL,00000001B ;指定六位数码管在最低位显示0-9OUT DX,ALCALL DELAY ;调用延时程序MOV AL,06H ;对应字符'1'MOV DX,220HOUT DX,ALMOV DX,221HMOV AL,00000010B ;指定六位数码管在次低位显示1OUT DX,ALCALL DELAYLOOP L1 ;CX=680HINC SI ;SI加1JMP L ;跳转至LGOON:INC SI ;SI加1MOV AL,[SI] ;查表MOV DX,220HOUT DX,ALMOV DX,221HMOV AL,00000001BOUT DX,ALL:MOV AL,20H ;写OCW2,送中断结束命令EOIOUT 20H,ALSTI ;开中断POP CX ;恢复现场POP AXPOP DXIRET ;中断返回INT_35 ENDPCODE ENDSEND START4.试验流程图:主程序流程图中断服务程序流程图。
实验四led灯和数码显示器的中断控制
实验四LED灯和数码显示器的中断控制一、实验目的:掌握外部中断的工作原理,熟悉中断编程及Keil平台软件调试方法。
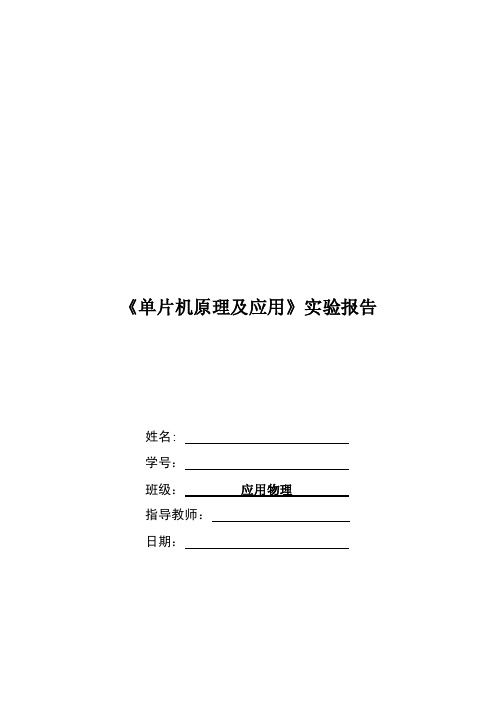
二、实验原理:实验电路如图A.53所示。
K1和K2分别接于端口P3.2和P3.3,按压后的电平负跳变可分别产生INT0中断请求和INT1中断请求。
INT0中断响应后取端口P0.4电平,使指示灯D1的状态反转,INT1中断响应后使计数值增1并送给数码管LED显示。
电路原理图及中断原理分析:按键K1接外部中断0,K2接外部中断1。
P0.4接指示灯D1,P2口接数码管,每按一次K1键电平产生负跳变,INT0中断响应后取端口P0.4电平,D1的状态反转;每按一次K2键产生负跳变,INT1中断响应使计数值增1并使数码管显示该数值,变化范围为0~F。
三、实验步骤:(1)、按照表A.5所示将元件添加到Proteus ISIS对象选择列表中,并仿照图A.53完成电路原理图绘制。
(2)、在Keil中编写C51程序,并使之编译通过。
(3)、在Keil中加载编译后的可执行文件,并控制Proteus中的程序仿真运行。
Category Reference Value Microprocessor ICs U1 80C51Optoelectromics D1 LED-GREENSwitches&Relays K1~K2 BUTTONResistors R1~R2/100 RES Optoelectronics LED 7SEG-COM-CAT-GRN四、实验要求:(1)、主函数在程序初始化完成后进入原地循环状态,等待中断请求。
(2)、两路外部中断均设为下降沿触发方式,且为自然优先级。
(3)、计数变量初值为0,变化范围为0~F。
(4)、实验报告内容包括:电路原理图及分析、中断原理分析,C51源程序(含注释语句),仿真运行截屏图,实验小结。
五、C51源程序如下:#include< reg51.h>char led_mod[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x58,0x5e,0x79,0x71};char flag;sbit p0_4= P0^4;void delay(unsigned int time){unsigned int j =0;for(;time>0;time--)for(j=0;j<125;j++);}int0_key () interrupt 0{p0_4=!p0_4;}int1_key () interrupt 2{delay(200);P2=led_mod[flag%16];delay(200);flag++;}void main(void) {flag=0;IT0= 1;EX0= 1;EX1= 1;EA= 1;while(1);}六、试验结果:(1)开始运行时如下图:(2)、按键后运行图如下:实验结果分析:由运行结果可以看出,按键K1产生外部中断0控制D1的状态,使指示灯D1由亮到暗一次变化;按键K2产生外部中断1使LED显示0~F不同数值。
单片机实验报告(相当不错,有具体实验结果分析哦)
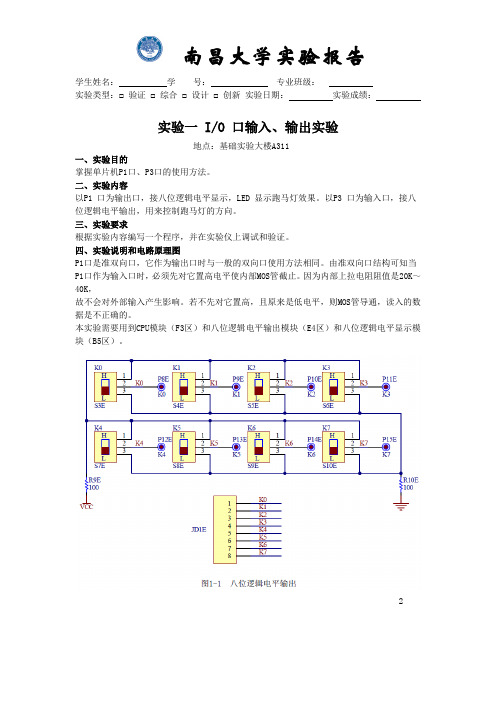
学生姓名:学号:专业班级:实验类型:□ 验证□ 综合□ 设计□ 创新实验日期:实验成绩:实验一 I/O 口输入、输出实验地点:基础实验大楼A311一、实验目的掌握单片机P1口、P3口的使用方法。
二、实验内容以P1 口为输出口,接八位逻辑电平显示,LED 显示跑马灯效果。
以P3 口为输入口,接八位逻辑电平输出,用来控制跑马灯的方向。
三、实验要求根据实验内容编写一个程序,并在实验仪上调试和验证。
四、实验说明和电路原理图P1口是准双向口,它作为输出口时与一般的双向口使用方法相同。
由准双向口结构可知当P1口作为输入口时,必须先对它置高电平使内部MOS管截止。
因为内部上拉电阻阻值是20K~40K,故不会对外部输入产生影响。
若不先对它置高,且原来是低电平,则MOS管导通,读入的数据是不正确的。
本实验需要用到CPU模块(F3区)和八位逻辑电平输出模块(E4区)和八位逻辑电平显示模块(B5区)。
2学生姓名:学号:专业班级:实验类型:□ 验证□ 综合□ 设计□ 创新实验日期:实验成绩:五、实验步骤1)系统各跳线器处在初始设置状态。
用导线连接八位逻辑电平输出模块的K0 到CPU 模块的RXD(P3.0 口);用8 位数据线连接八位逻辑电平显示模块的JD4B 到CPU 模块的JD8(P1 口)。
2)启动PC 机,打开THGMW-51 软件,输入源程序,并编译源程序。
编译无误后,下载程序运行。
3)观察发光二极管显示跑马灯效果,拨动K0 可改变跑马灯的方向。
六、实验参考程序本实验参考程序:;//******************************************************************;文件名: Port for MCU51;功能: I/O口输入、输出实验;接线: 用导线连接八位逻辑电平输出模块的K0到CPU模块的RXD(P3.0口);;用8位数据线连接八位逻辑电平显示模块的JD2B到CPU模块的JD8(P1口)。
实验四指示灯数码管的中断控制

洛阳理工学院实验报告
图4.2 摆放元器件
4.布线图
(1)画导线
两个元件只需要单击两个元件的连接点,ISIS
完成两点连线操作。
单机“工具”菜单栏里的“自动连线”选线,可使走线的
图4.3 布线完成图
5.打开μVision4软件
新建μVision4工程,并新建文件,编写C51程序,
文件,并进行编译,编译后的文件为.hex格式,文件名为
件编译成Shiyansi4.omf文件,此文件用来调试用的。
如图
图4.5 在μVision4中对C51程序进行调试
7.点击80C51,选择Shiyan4.omf,在ISIS中的对
图4.7(1)运行结果
图4.7(2)运行结果
实验总结:
通过本次试验,更深的了解Proteus ISIS模块的软件结构,菜单栏、工具栏、对话框等基本单元功能;熟悉了μVision4编译软件,了解了软件结构与功能,并完成了本实验的C51编程;掌握在μVision4中进行。
单片机指示灯和数码管的中断控制实验报告.doc

单片机指示灯和数码管的中断控制实验报告.doc本次实验是对单片机指示灯和数码管的中断控制的探索与实验。
本次实验采用的控制芯片是C8051F020,并使用了Keil uVision 5软件进行编程,通过搭建的硬件电路实现指示灯和数码管的控制。
一、实验目的1.了解中断的基本概念和中断的处理过程;2.学习如何设置中断优先级和使用中断嵌套;4.进一步巩固单片机的编程基础。
二、实验内容1.实现定时器中断控制指示灯,每隔一定时间改变指示灯的亮灭状态2.实现外部中断控制数码管,当外部引脚有电平变化时,更新数码管的显示内容三、实验原理中断是单片机系统中常用的一种处理机制。
引发中断的事件可以是定时器计数器溢出,外部I/O口电平跳变、串口数据到达等多种情况。
在中断响应后,单片机会暂停当前的程序执行,先转到相应的中断服务程序中执行,待中断处理完成后再从原来暂停的位置继续执行。
本次实验中,通过使用单片机的定时器和外部中断控制指示灯和数码管。
定时器中断每隔一定时间改变指示灯的状态,外部中断控制数码管显示内容的改变。
在编程时,需要设置中断的优先级和中断嵌套的情况。
四、实验步骤1.硬件连接将指示灯连接到P0.0引脚,将数码管连接到P2口对应的引脚,在数码管的位选接口处接入一个按键(用于模拟外部中断)。
2.编写定时器中断代码在Keil uVision中打开一个新的工程,编写定时器中断的代码,具体代码如下://包含头文件和全局变量定义#include<reg51.h>unsigned char ledStatus = 0;//定时器中断服务程序void tmr0_isr(void) interrupt 1{TMOD &= 0xf0;TH0 = (65536-50000)/256;}//定时器初始化ET0 = 1;unsigned char code num_c[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};//LED灯控制函数control_led();//外部中断初始化//数码管更新函数P0 = num_c[num];P2 = ~(0x01<<num);4.实验结果将编写好的程序下载到单片机控制芯片上,按下数码管的位选按键,就可以看到数码管上的数字不断改变,同时指示灯每隔一定时间改变一次状态。
指示灯、数码管的中断控制实验报告

指示灯、数码管的中断控制实验报告
本次实验是通过中断控制指示灯和数码管的显示。
我们使用了STC89C52单片机来进行控制实验。
首先,我们定义了两个常量。
一个是DELAY,用于控制指示灯闪烁的速度;另一个是DELAY2,用于控制数码管显示的速度。
由于数码管的刷新速度要比指示灯快,所以我们设置了一个较小的DELAY2值。
在主函数中,我们对单片机进行了初始化,并开启了中断。
然后,我们通过一个while循环不断循环执行,等待中断的触发。
在中断处理函数中,我们利用了定时器来控制指示灯的闪烁,当计数器的值等于DELAY时,就切换指示灯的状态。
通过这种方式,我们可以让指示灯不断地交替闪烁。
对于数码管的中断控制,我们使用了另一个定时器。
每隔一段时间,就会调用中断处理函数,更新数码管的显示内容。
在这个函数中,我们定义了一个数码管显示表,通过循环周期地改变显示的内容,从而实现了数码管数字的滚动显示。
在实验过程中,我们还需要注意一些问题。
首先是定时器的设置,不仅要考虑到闪烁和滚动的速度,还要注意计数器的初始值和中断的开启。
另外,由于中断会频繁地跳入中断处理函数,我们需要尽量减少中断函数的执行时间,避免影响程序的运行。
通过这一次实验,我们掌握了中断控制指示灯和数码管的方法,对单片机的应用有了更深入的了解。
在今后的学习和开发中,这些基础知识将会起到重要的作用。
实验4.指示灯 数码管的中断控制
实验4.指示灯/数码管的中断控制【实验目的】掌握外部中断原理,学习中断编程与程序调试方法。
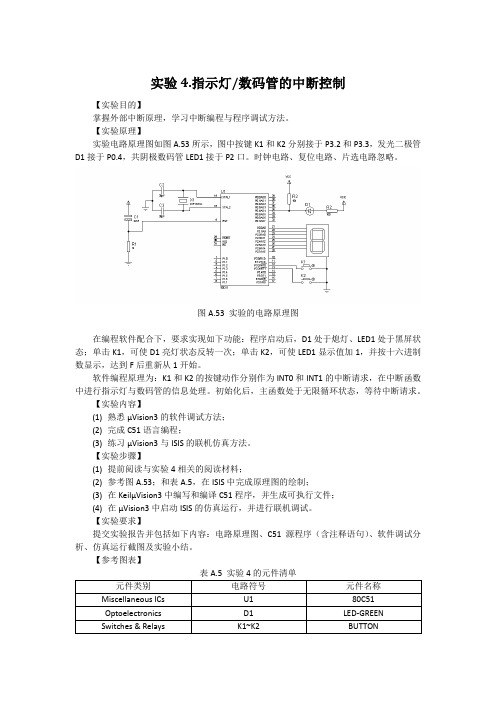
【实验原理】实验电路原理图如图A.53所示,图中按键K1和K2分别接于P3.2和P3.3,发光二极管D1接于P0.4,共阴极数码管LED1接于P2口。
时钟电路、复位电路、片选电路忽略。
图A.53 实验的电路原理图在编程软件配合下,要求实现如下功能:程序启动后,D1处于熄灯、LED1处于黑屏状态;单击K1,可使D1亮灯状态反转一次;单击K2,可使LED1显示值加1,并按十六进制数显示,达到F后重新从1开始。
软件编程原理为:K1和K2的按键动作分别作为INT0和INT1的中断请求,在中断函数中进行指示灯与数码管的信息处理。
初始化后,主函数处于无限循环状态,等待中断请求。
【实验内容】(1)熟悉μVision3的软件调试方法;(2)完成C51语言编程;(3)练习μVision3与ISIS的联机仿真方法。
【实验步骤】(1)提前阅读与实验4相关的阅读材料;(2)参考图A.53;和表A.5,在ISIS中完成原理图的绘制;(3)在KeilμVision3中编写和编译C51程序,并生成可执行文件;(4)在μVision3中启动ISIS的仿真运行,并进行联机调试。
【实验要求】提交实验报告并包括如下内容:电路原理图、C51源程序(含注释语句)、软件调试分析、仿真运行截图及实验小结。
【参考图表】【实验程序】/*指示灯、数码管的中断控制程序*/#include <reg51.h>sbit P0_4 = P0^4;unsigned char i = 0; //数码管计数初始值0unsigned char duanma[16] ={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71}; //0-F的数码管段码void main(){ P2 = 0x00; //开机数码管黑屏P0_4 = 1; //开机LED灯灭EA = 1; //总中断允许EX1 = EX0 = 1; //INT0、INT1允许IT1 = IT0 = 1; //脉冲触发while(1);}void INT_0SVR() interrupt 0 //INT0中断函数{ P0_4 = !P0_4; //将P0_4非赋值给P0_4}void INT_1SVR() interrupt 2 //INT1中断函数{ i++; //数码管计数加一if(i==16) //当数码管计数达到16时回归1i = 1;P2 = duanma[i]; //将段码赋值给P2}【仿真截图】略【实验小结】通过实验对Protues有了更多的了解,同时了解到中断系统在实际中的更好应用。
单片机原理 中断实验-单片机原理-实验报告

宁德师范学院计算机系实验报告(2014—2015学年第2学期)课程名称单片机原理实验名称中断实验专业计算机科学与技术(非师)年级12级学号B********** 姓名王秋指导教师杨烈君实验日期2015.5.21实验步骤、实验结果及分析:1、使用Proteus ISIS 7 Professional应用程序,建立一个.DSN文件2、在“库”下拉菜单中,选中“拾取元件”(快捷键P),分别选择以下元件:AT89C51、LED-YELLOW、BUTTON、7SEG-MPX8-CA-BLUE、RESPACK-8。
3、构建仿真电路4、创建一个Keil应用程序:新建工程项目文件;为工程选择目标器件(AT89C52);为工程项目创建源程序文件并输入程序代码;保存创建的源程序项目文件;把源程序文件添加到项目中。
5、把程序经过编译后生成的HEX文件添加到仿真电路中的处理器中(编辑元件→文件路径)程序代码:1.实现单按键控制Led灯闪烁#include"reg51.h"#define uchar unsigned charsbit Led1=P1^0; uchar Mode=0;void delay(int x) //定义时间间隔{while(x--);}void button_Cotrol() //根据按键模式执行相应的代码{if(Mode==0)Led1=0;if(Mode==1){Led1=~Led1;delay(1000);}}void int0() interrupt 0 //外中断0的中断编号为0{Mode=(Mode+1)%2; //更改按键模式}void main(){Led1=0; //置初值EA=1; //开放总中断EX0=1; //允许使用外中断0IT0=1; //选择负跳变来触发外中断while(1)button_Cotrol();}图1 单按键控制Led灯闪烁while(1)button_Cotrol();}图2 单按键多功能识别,控制4路Led灯闪烁3.实现0-99的计数器效果,按一下数值加1#include"reg51.h"#define uchar unsigned char#define disp_null 10sbit key=P3^2;uchar code tab[11]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff}; //共阳数码管显示0~9的段码表uchar DispBuf[8];uchar sec=0;void delay(int x) //定义时间间隔{while(x--);}void PutTime(){DispBuf[7]=sec%10;while(1){P1=0x00;display();}}图3 0-99的计数器效果,按一下数值加1注:1、报告内的项目或设置,可根据实际情况加以补充和调整2、教师批改学生实验报告应在学生提交实验报告10日内。
单片机实验报告(学期全部实验)

单片机程序设计实验报告姓名:学号:专业班级:第二节课:实验一:1357,2468位置的灯交替闪烁一实验要求1357,2468位置的灯交替闪烁。
二硬件连接图与结果三原理简述程序直接控制LED各位置的灯亮灭,时间间隔简单的用了一个延时的语句。
四程序#include<reg51.h>main (){int i;P0=0XAA; //1357四个灯亮for (i=0;i<=25000;i++); //延时程序P0=0X55; //2468四个灯亮for (i=0;i<=25000;i++); //延时程序}五所遇问题与解决方式程序比较简单,没有遇到问题。
实验二:流水灯一实验要求流水灯,一个接一个的灯亮,亮到最后一个后,全部的灯亮,然后重头开始。
二硬件连接图与结果三原理简述程序定义第一个位置的灯亮,通过一个时间间隔,运用一个循环移位程序转移到下一个灯,移位7次后全部的灯亮,最后定义整个循环。
时间间隔简单的用了一个延时的语句。
因为移位时是直接补0,发送低电平不亮,所以直接移位达到要求。
四程序//流水灯#include<reg51.h>main (){int i,j;while(1){P0=0X01; //第1个灯亮for (i=0;i<=30000;i++); //延时程序for(j=0;j<=7;j++) //移位循环程序{P0=P0<<1; //移位for (i=0;i<=30000;i++); //延时程序}P0=0xff; //全亮for (i=0;i<=30000;i++); //延时程序}}五所遇问题与解决方式程序比较简单,没有遇到问题。
实验三:跑马灯一实验要求一个接一个的灯亮,前面亮过的等依旧亮,直到最后一个灯,最后重新开始,循环。
二硬件连接图与结果三原理简述程序定义第一个位置的灯亮,通过一个时间间隔,运用一个循环移位程序转移到下一个灯,移位7次后全部的灯亮,最后定义整个循环。
51单片机动态数码管实验报告
51单片机动态数码管实验报告
本文介绍了51单片机动态数码管实验的步骤和结果。
动态数码管是一种常用的数字显示器件,它可以显示数字、字母和一
些图形。
在51单片机中,为了控制动态数码管的显示,我们需要使用定
时器和中断。
作为一个经典的单片机实验,动态数码管实验是初学者熟悉51单片机开发的重要步骤之一。
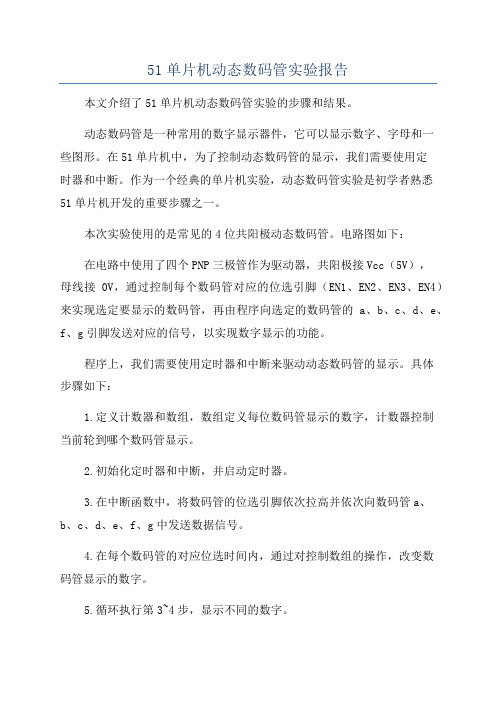
本次实验使用的是常见的4位共阳极动态数码管。
电路图如下:
在电路中使用了四个PNP三极管作为驱动器,共阳极接Vcc(5V),
母线接0V,通过控制每个数码管对应的位选引脚(EN1、EN2、EN3、EN4)来实现选定要显示的数码管,再由程序向选定的数码管的a、b、c、d、e、f、g引脚发送对应的信号,以实现数字显示的功能。
程序上,我们需要使用定时器和中断来驱动动态数码管的显示。
具体
步骤如下:
1.定义计数器和数组,数组定义每位数码管显示的数字,计数器控制
当前轮到哪个数码管显示。
2.初始化定时器和中断,并启动定时器。
3.在中断函数中,将数码管的位选引脚依次拉高并依次向数码管a、
b、c、d、e、f、g中发送数据信号。
4.在每个数码管的对应位选时间内,通过对控制数组的操作,改变数
码管显示的数字。
5.循环执行第3~4步,显示不同的数字。
最后,我们通过改变控制数组的值,实现了动态数码管显示不同数字和字母的功能。
总之,通过动态数码管实验,我们进一步熟悉了51单片机的定时器和中断,了解了动态数码管的驱动原理和程序设计方法,为后续更复杂的单片机实验和应用打下了基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四、指示灯和数码管的中断控制
一、实验目的
掌握外部中断的工作原理,学会中断程序设计。
二、实验内容
1、按照教材图A.53,绘制实验四电路原理图;
2、要求采用外部中断原理完成本次实验,其中按键K1、K2均设置为下降沿触发方式,自然优先级;
3、编写C51程序实现如下功能:开机后D1灭灯,LED1黑屏,随后单击K1→D1状态反转,单击K2 →LED1从0开始循环显示0~F字符。
4、观察仿真结果,完成实验报告。
三、实验要求
提交的实验报告中应包括:电路原理图,外部中断工作原理阐述(以K1为例说明中断响应过程),C51源程序(含流程图与注释语句),运行效果(含运行截图与说明),实验小结。
提交实验报告的电子邮件主题及存盘文件名格式如,2005041220马晓明实验四。
1、电路原理图
2、外部中断工作原理阐述
持续按下K1则D1将“亮→灭→亮→灭→亮→灭如此循环,表明实现了K1对应于D1状态反转这个功能;持续按下持续按K2则数码显示管依次显示1-F,实现了K2对应于0~F间的数码管加一计数显示。
3、C51程序
#include<reg51.h>
sbit P0_4=P0^4;
unsigned char count=0;
unsigned led_mod[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0 x5e,0x79,0x71};
void main(){
P2=0x00;
P0_4=0;
EA=1;
EX1=EX0=1;
IT1=IT0=1;
while(1);
}
void INT_OSVR() interrupt 0
{P0_4=!P0_4;}
void INT_1SVR() interrupt 2
{count++;
if(count==16)
count=1;
P2=led_mod[count];
}
4、仿真运行效果
5、实验小结
通过本次实验对Protues有了更多的了解,同时了解到中断系统在实际中的更好应用。
经过编程操作起来更加熟练,能很快的完成绘图,编程时也更得心应手,能熟练的运用软件找出自己所编程序中的语法问题及其他问题,并予以改正。
相信在今后的学习与试验中能取得更大的进步。