串联校正.ppt
频率法的串联校正

应用实例的效果评估和改进建议
效果评估
通过对比串联校正前后的系统响应曲线、超调量、调节时间等指标,评估串联校正的效果。
改进建议
根据效果评估结果,针对不足之处提出改进措施,如调整串联校正环节的参数、优化PID控制器参数 等,以提高系统的整体性能。
05
结论与展望
结论与展望 频率法的优缺点总结
优点 频率法是一种简单、直观的校正方法,易于理解和实现。
性能指标优化
根据系统性能指标的要求,如上升时间、超调量、调节时间等,优化串联校正器 的参数。
频率法与其他校正方法的比较
与PID校正的比较
频率法可以提供更直观的动态性能指标,易于理解和分析, 而PID校正则更注重控制效果和实时性。
与状态空间法的比较
状态空间法基于系统的状态方程进行描述,具有更强的通用 性和灵活性,而频率法更适用于线性时不变系统的分析。
01
未来研究方向和展望
02
未来研究可以进一步探讨频率法与其他校正方法的结合使用,
以提高系统的性能和稳定性。
此外,对于复杂系统,可以考虑使用自适应控制、鲁棒控制等
03
方法进行串联校正,以获得更好的控制效果。
结论与展望 频率法的优缺点总结
01
对实际应用的建议和指导
02
在实际应用中,应根据具体系统的特性和要求选择合适的串联校正方 法。
计算过程中的注意事项
确保开环频率响应计算的准确性
01
开环频率响应是计算串联校正器参数的基础,因此需要确保其
计算的准确性。
根据实际需求选择合适的性能指标
02
在确定系统性能指标时,需要根据实际需求进行选择,避免过
高或过低的指标要求。
注意串联校正器的稳定性
串联校正详解

1+ sinϕm a= 1− sinϕm
求未校正系统幅值为-10lga处的频率 ωc′ = ωm 处的频率 ′ 求未校正系统幅值为
ω1 = ωm
a
ω2 = ωm a
Y 结束
N
γ 满足要求? 满足要求?
R(s)
100 s (0.1s + 1)
C(s) 串联超前校正? 串联超前校正?
Bode Diagram Gm = Inf dB (at Inf rad/sec) , Pm = 18 deg (at 30.8 rad/sec) 100
Magnitude (dB) Phase (deg)
50
0
-50
-100 -90
-1
10
0
10
1
10
2
10
3
Frequency (rad/sec)
超前校正环节的特性
无源超前校正
R1 u1 (a) C R2 u2
5 0 Magnitude (dB) -5 -10 -15 -20 -25 60
U2 (s) 1 1+αTs Gc (s) = Gc (s) = U1(s) α 1+ Ts R1 R2 C R1 + R2 T= α= R1 + R2 R2
R(s) E(s) C(s) Gc (s) (s) H (s)
Go (s)
−
20lg G = 20lg Gc + 20lg G0H
1+αTs s ω1 +1 Gc (s) = = 1+ Ts s ω2 +1
ω < ω1,20lg Gc = 0
校正环节对低频特性无影响, 校正环节对低频特性无影响, 低频特性无影响 对稳态性能无影响。 对稳态性能无影响。
《串联校正的设计》PPT课件

γ=43.4°
γ0=-13°
未校正系统和校正系统的闭环频率特性比较
-3dB
带宽减小 调整时间增大
ωb
ωb0
单位阶跃响应比较 未校正系统
校正系统
串联相位滞后装置的作用
1、提高系统低频响应的增益,减 少稳态误差。
2、使系统高频响应的增益衰减, 提高系统的相角裕度,改善暂态 性能。
设计串联相位滞后校正装置的步骤:
未校正系统bode图
校正系统bode图
增益裕度:0.44 相角裕度:-13.2°
增益裕度:15 相角裕度:61.9°
未校正系统和校正系统的bode图
ωc=16.18
ωc0=47
γ γ0
相角裕度增大
未校正系统和校正系统的闭环频率特性比较
-3dB
带宽减小
ωb ωb0
单位阶跃响应比较 未校正系统
校正系统
4 10 s 1 s 1
0.256 156 .25
校正后系统的传递函数:
G(s) Gc (s)Go (s)
s 1 s 1 4 10
250
s 1 s 1 s s 1 s 1
0.256 156.25 10 100
250 s 1
4
s s 1 s 1 s 1
0.256 156.25 100
(2,x)
(ω2,20lg(1/α))
0 -10lg(1/α) 1
(ω1,0)
ωc
2
ω1ωc0 ωm
ω2
-40dB/dec
ω
100
解:(1)根据误差等稳态指标的要求,确定系 统的开环增益K
Kv
lim
s0
sGo (s)
串联校正
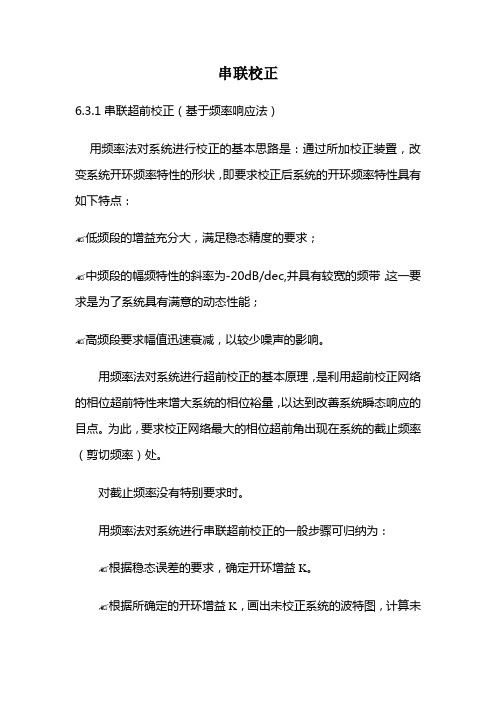
串联校正6.3.1串联超前校正(基于频率响应法)用频率法对系统进行校正的基本思路是:通过所加校正装置,改变系统开环频率特性的形状,即要求校正后系统的开环频率特性具有如下特点:✍低频段的增益充分大,满足稳态精度的要求;✍中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这一要求是为了系统具有满意的动态性能;✍高频段要求幅值迅速衰减,以较少噪声的影响。
用频率法对系统进行超前校正的基本原理,是利用超前校正网络的相位超前特性来增大系统的相位裕量,以达到改善系统瞬态响应的目点。
为此,要求校正网络最大的相位超前角出现在系统的截止频率(剪切频率)处。
对截止频率没有特别要求时。
用频率法对系统进行串联超前校正的一般步骤可归纳为:✍根据稳态误差的要求,确定开环增益K。
✍根据所确定的开环增益K,画出未校正系统的波特图,计算未校正系统的相位裕度 。
✍根据截止频率c ω''的要求,计算超前网络参数a 和T ;关键是选择最大超前角频率等于要求的系统截止频率,即c m ωω''=,以保证系统的响应速度,并充分利用网络的相角超前特性。
显然,c m ωω''=成立的条件是a L L c c c o lg 10)()(==''-ωω (6-35)由上式可求出aa T m ω1= (6-36)由(6-36)求出T。
✍验证已校正系统的相位裕度γ''。
✍由给定的相位裕度值γ,计算超前校正装置提供的相位超前量ϕ,即补偿校正前给定的←+-==↑↑''εγϕϕγmε是用于补偿因超前校正装置的引入,使系统截止频率增大而增加的相角滞后量。
ε值通常是这样估计的:如果未校正系统的开环对数幅频特性在截止频率处的斜率为-40dB/dec ,一般取︒︒=10~5ε;如果为-60dB/dec 则取︒︒=20~15ε。
✍根据所确定的最大相位超前角m ϕ按m ma ϕϕsin 1sin 1-+=(6-37) 算出a 的值。
自动控制原理6.3 串联校正

10lg
1
,所对应的
就是
' c
,且 m
'。
c
§6—3 串联校正
4) 1
1 T
,m
1
T
,2
1
T
,
1
m
c' ,
2
m
c'
s
1
Gc s
1
s
1
Ts 1
Ts 1
2
5)画 Lc、L'、c、 ' 曲线。
1 sin 350 1 sin 350
1 0.57 1 0.57
0.27
则10lg 1
5.6db ,在L 上量
5.6db
所对
L
0
( )
db
-20 -20
1 c
1
'
2
c
+20
-40
-40
m
0
90
0
m '
校正装置
校正后系统
Gk s
100.45s 1 ss 10.12s 1
§6—3 串联校正
' 1800 c1 1800 900 tg10.45 4.3 tg14.3
tg1 0.12 4.3 900 62.70 76.90 27.30 48.50 450
3、步骤:
1)根据ess确定K;
2)根据K、υ绘制原系统的 L、,确定未校正
线性系统的校正方法串联校正
串联校正的基本概念
01
串联校正结构
串联校正是指将校正装置串联在系统输入输出通道中的一种校正方式。
通过在系统中加入适当的校正装置,可以改善系统的性能。
02 03
校正装置
串联校正中使用的装置称为校正装置,常见的有滞后环节、超前环节和 PID控制器等。这些装置可以通过适当的选择和组合,实现对系统性能 的改善。
目的
提高系统的相位裕度,改 善系统的稳定性。
实现方式
通常通过在系统前向通路 中加入一个电阻元件来实 现相位滞后。
相位超前-滞后校正
定义
通过在系统中同时加入相位超前和滞后环节,对系统的频率特性 进行综合调整。
目的
在改善系统稳定性的同时,对系统的增益和带宽进行优化。
实现方式
通常通过同时调节电容和电阻元件的值来实现相位超前和滞后校 正的综合效果。
滞后校正实例
滞后校正器通常用于增加系统 的相位裕度,提高系统的稳定 性。
滞后校正器具有减小系统对高 频噪声的敏感性、减小系统对 参数变化的敏感性的优点。
滞后校正器的传递函数通常具 有较大的分子和较小的分母, 能够增加系统的相位延迟,提 高系统的稳定性。
超前-滞后校正实例
超前-滞后校正器结合了超前校正器和滞后校正 器的优点,能够同时改善系统的动态性能和稳 态性能。
串联校正方法具有模块化特性,可以针对不同的性能需求,灵活地选择和设计校正环节,实现分段校正。
串联校正方法的优势与局限性
• 串联校正方法在工程方法的优势与局限性
01
局限性
02
串联校正方法可能导致系统稳定性降低,因为引入了额外的传递环节。
03
串联校正方法通常需要精确的模型参数,对于模型误差敏感,对实际 系统的适应性有限。
自动控制原理第六章第三讲超前网络及其串联校正

根据截止频率
的要求,计算超前网络参数a和T;
求出T;
即可得超前网络的传递函数:
则已校正系统的传递函数为:
绘出校正后的对数幅频特性:
验证已校系统的相角裕度 ,若不满足 要求,应重选 ,一般使其增大。
步骤:
确定开环增益K(根据稳态误差的要求);
(
s
E
)
(
1
s
G
)
(
s
G
)
(
2
s
G
)
(
s
C
)
(
s
G
r
+
系统输出:
系统误差:
当:
时,
对输入的 误差全补偿条件
说明: 以上结论仅在理想条件下成立:
无论是输出响应完全复现输入或是完全不受扰动影响, 都是在传递函数零、极点对消能够完全实现的基础上得到的。
由于控制器和对象都是惯性的装置, 故G1(s)和G2(s)的分母多项式的s阶数比分子多项式的s阶数高。 据补偿式可见, 要求选择前馈装置的传递函数是它们的倒数, 即Gr(s)或Gn(s)的分子多项式的s阶数应高于其分母多项式的s阶数, 这就要求前馈装置是一个理想的(甚至是高阶的)微分环节。
滞后-超前网络贡献的幅值衰减的最大值
由相角裕度要求,估算网络滞后部分的交接频率 , 得:
01
结束
02
绘制已校正系统Bode图,校验性能指标
03
反馈校正
开环传函为:
工作原理 设图中局部反馈回路为G2c(s), 其频率特性为 :
反馈校正、复合校正基本原理
整个反馈回路的 传递函数等效为:
理想的微分环节实际不存在, 所以完全实现传递函数的零、极点对消在实际上也是做不到的。
《串联滞后校正》课件

实验数据展示:将实验数据整理成表格或图表形式,以便于观察和分析
实验结果分析:对实验结果进行详细分析,包括数据变化趋势、影响因素等 实验结果讨论:对实验结果进行讨论,探讨串联滞后校正对系统性能的影响
实验结论总结:总结实验结果,得出串联滞后校正对系统性能的改善效果
实验验证结果:串联滞后校正能够提高系统稳定性 实验验证方法:通过搭建电路、编程控制等手段进行实验验证 实验结果分析:通过数据分析和图表展示,证明串联滞后校正对系统稳定性的提升效果 展望未来:探讨串联滞后校正技术的未来发展方向和应用前景
PART SEVEN
本文工作总结:介绍了串联滞后校正的工作原理、设计方法、实现过程以及实验结果分析等方面的内容 本文贡献:提出了串联滞后校正技术在实际应用中的优势和局限性,并探讨了未来研究方向和可能的改进方案
拓展串联滞后校正技术的应 用领域
串联滞后校正
建立数学模型 模型参数优化 模型验证与修正 实际应用与效果评估
PART SIX
实验平台搭建:介绍实验所需的硬件设备和软件环境 测试方法:详细阐述实验的测试步骤和方法,包括测试数据的获取和处理 实验结果分析:对实验结果进行详细的分析和解释,包括性能指标的评估和优化建议 实验结论:总结实验的主要发现和结论,强调串联滞后校正的重要性和应用价值
稳定性
滞后校正的应用场景:改善系 统性能,提高系统抗干扰能力
相位裕度的定义
串联滞后校正对相位裕度的影响
添加标题
添加标题
相位裕度与系统稳定性的关系
添加标题
添加标题
如何选择合适的串联滞后校正器
串联滞后校正对噪声性能的影 响
串联滞后校正对灵敏度的影响
串联滞后校正与噪声性能和灵 敏度的关系
如何优化串联滞后校正的噪声 性能和灵敏度
《频率法的串联校正》PPT课件

假设该网络信号源的阻抗很小,可以忽略不 计,而输出负载的阻抗为无穷大,则其传递函数为
Gc
(s)
U U
c r
(s) (s)
R2
R2 R1 //
1 Cs
R2
R2 R1
1 R1Cs
R2 (1 R1Cs) R2 (1 R1Cs) /( R1 R2 ) R2 R1 R1R2Cs (R1 R2 R1R2Cs) /( R1 R2 )
50
Magnitude (dB)
0
-50
-100
-150 -90
-135
Phase (deg)
-180
-225
-270
-1
0
1
2
3
4
5
10
10
10
10
10
10
10
Frequency (rad/sec)
幅值裕量Gm=16.1dB;-180o穿越频率ωg=657s-1;
相位裕量Pm=46.3deg;穿越频率ωc=193s-1
在未校正的考虑k的 G0上找-10lgα所对 应的ω为ωc=ωm
校核 G(s)
G(s) Go (s) • Gc (s)
Gc (s) 1 Ts
Gc (s) 1 Ts
T
m
1
T
19
【例8-1】已知单位负反馈系统被控对象的传递函数为:
Go (s)
K0
s(0.1s
1 1)(0.001s
1)
试用Bode图设计方法对系统进行超前串联校正设计,使之满
(1)主要对未校正系统中频段进行校正,使校正后中频段幅值 的斜率为-20dB/dec,且有足够大的相位裕量。
串联校正的设计共48页PPT

71、既然我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下去。——康德 72、家庭成为快乐的种子在外也不致成为障碍物但在旅行之际却是夜间的伴侣。——西塞罗 73、坚持意志伟大的事业需要始终不渝的精神。——伏尔泰 74、路漫漫其修道远,吾将上下而求索。——屈原 75、内外计
51、山气日夕佳,飞鸟相与还。 52、木欣欣以向荣,泉涓涓而始流。
53、富贵非吾愿,帝乡不可期。 54、雄发指危冠,猛气冲长缨。 55、土地平旷,屋舍俨然,有良田美 池桑竹 之属, 阡陌交 通,鸡 犬相闻 。
谢谢你的阅读
自动控制原理6.3 串联校正

Rf R1
R1 R2 a 1 R2
R f [1 ( R1 R2 )C s ]
式中 K
T R2 C
注意:负号是因为采用了负反馈的运放,如果再串联 一只反相放大器即可消除负号。
超前网络的频率特性为: Gc ( j ) 1 j aT
1 j T
20 lg Gc / dB
10lga
20dB/dec
20lg a
d c ( ) 0 令 d
得最大超前相角频率为: m
1 T a
最大超前相角为: a 1 m arctg 或 2 a
a 1 m arcsin a 1
1 sin m 上式又可以写成如下形式: a 1 sin m
由此可见,最大超前相位角φm仅与分度系数a有关。 a值选得越大,超前网络的微分效应越强。为了保持较 高的系统信噪比,实际选用的a值一般不超过20。
3.相位超前校正的作用
对于某稳定的开环传函的渐近频率特性曲线L1、φ1。
20 lg Gc / dB
-20dB/dec -40dB/dec -20dB/dec O
(aT)-1 c1 c 2
-80dB/dec
T-1
-60dB/dec
-80dB/dec
L1
L2
1
2
图6-11 相位超前校正的作用
dB,削弱了系统抗高频干扰的能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.串联滞后校正 基本原理: 利用滞后网络或PI控制器的高频幅值衰减 特性,使已校正系统截止频率下降,从而 使系统获得足够的相角裕度。
2根据K,确定 " 3根据c ", 确定a和T 4验正 "
解:
1根据ess,确定K
ess
1 K
0.1 K
10(rad )1
则待校正系统开环传递函数:G(s) 10 s(s 1)
2根据K,确定 ' 通过作图法求得待校正系统地截止频率c ' 3.1rad / s 可得相角裕度 ' 180 90 arctgc ' 17.9 c '和 '均低于系统要求,故采用串联超前校正。
2根据K,确定 " 3根据c ", 确定a和T 4验正 "
4验证 " 选取c"=4.4rad / s,可得 (c") 12.8 算出m 36.9 " m (c") 49.7 45满足设计要求
已校正系统的幅值裕度仍为 dB 全部性能指标均满足。
表明
•系统经串联校正后,中频段斜率变为 【-20dB/dec】,并占据6.6rad/s的频 带范围,从而系统相角裕度增大,动 态过程超调量下降。
•串联超前校正可使开环系统截止频率 增大,从而闭环系统带宽也增大,使 响应速度加快。
•实际的控制系统,中频段斜率大多为 【-20dB/dec】。
制约因素
•闭环带宽的要求
若待校正系统不稳定,为得到规定的相角 裕度,需要超前网络提高很大的相角超前 量,故a很大,从而造成已校正系统带宽 过大,使的通过系统的高频噪声电平过高, 可能使系统失控。
第六章 线性系统的校正方法
6-0 引言 6-1 系统的设计与校正问题 6-2 常用的校正装置及其特性 6-3 串联校正 6-4 反馈校正 6-5 复合校正
若系统设计要求满足的性能指标属于频 域特征量,则采用串联校正。
6-3 串联校正 1. 频率响应法校正设计 2. 串联超前校正 3. 串联滞后校正 4. 串联滞后-超前校正 5. 串联综合法校正
•在截止频率附近相角迅速减小的待校正系 统,一般不宜采用串联超前校正。
相角迅速减小的原因:在待校正系统截止频 率附近,或有两个交接频率彼此靠近的惯性 环节,或有一级以上)的串联超前网 络进行串联超前校正。 •采用一个滞后网络进行串联滞后校正。 •采用测速反馈校正。
频率法设计无源超前网络的设计步骤
分四个步骤:
1根据ess,确定K
2根据K,确定 " 3根据c ", 确定a和T 4验正 "
设计步骤
(1)根据稳态误差,确定开环增益K (2)根据开环增益K,确定待校正系统的相角裕度
(3)根据截止频率wc”, 计算超前网络参数a和T
wm=wc”
m c成立条件: L'(c") Lc (c ) 10lg a
可得a值 由公式:T 1 ,确定T值
m a
(4)验算已校正系统的相角裕度r”
验算方法:由已经a值查图6-13(b),或由 公式(6-21)求得最大超前相角。再有已经 的截止频率算出待校正系统在截止频率时候的 相角裕度r”(wc”)。 当验算的结构不满足指标要求时,需重新选择 最大超前角频率。
若待校正系统为非最小相位系统,则(c")由作图法确定, 最后按公式 " m (c")算出。
已校正系统的开环传递函数为:
G(s) 10(1 0.0456s) s(1 0.114s)(s 1)
如下页图所示
【-20】
G(s) 10 s(s 1)
G(s) 10(1 0.0456 s) s(1 0.114 s)(s 1)
【L”(w)】 【-60】
【L’(w)】【-40】
1根据ess,确定K
例题6-3
R(s) E(s) K C(s) - B(s) s(s 1)
图6-21 控制系统
题目:要求系统在单位斜坡输入信号作用下,
位置输出稳态误差ess 0.1rad,
开环系统截止频率c" 4.4rad / s, 相角裕度 " 45,幅值裕度h"dB 1dB
试设计串联无源超前网络。
1根据ess,确定K
最小相位系统 ,画出对数幅频特性图
如下页图所示
【-20】
【L’(w)】
G(s) 10 s(s 1)
【-40】
c ' 3.1rad / s
' 17.9
3根据c ", 确定a和T 选取c"=4.4rad / s,由bode图可得L'(c") 6dB
a 4,T 0.114s
超前网络传递函数4G(s) 1 0.0456s 1 0.114s
6. 串联工程设计方法
1. 频率响应法校正设计
特点:
•设计结果仅满足频域指标,非时域指标
•方法简便,在波特图基础上确定校正装
置的参数。
开环系统对数频率特性
低频段: 表征闭环系统的 稳态性能。
中频段: 表征闭环系统的 动态性能。
高频段: 表征闭环系统的 复杂性和噪声抑 制性能。
设计原理
即:在系统中加入频率特性形状合适 的校正装置,使开环系统频率特性形 状变成所期望的形状。
低频段: 开环增益充分大,满足 闭环系统的稳态性能的 要求。
中频段: 对数幅度特性曲线斜率 一般为【- 20dB 】, 并占据充分的频带,以 保证具备适当的相角裕 度。
高频段: 增益尽快减小,以消弱 噪声影响。若系统原有 部分高频段已符合该要 求,则校正使可保持高 频段形状不变,以简化 校正装置的形式。
均仅仅适用最小相位系统
常用方法
线性系统常用的校正装置设计方法:
分析法和综合法
分析法(又称试探法):
综合法(期望特性法):
特点:直观,物理上易于实现, 特点:理论上,物理上难以
但要求设计者有一定的设计经验, 准确实现。
设计过程带有试探性。
思想:根据开环系统对数频
目前工程上多采用的方法。
率特性(波特图),根据规
定的性能指标要求确定系统
期望的开环特性形状,再与
系统原有开环特性相比较,
从而确定校正方式,校正装
置的形状和参数。
2. 串联超前校正
基本原理: 利用超前网络或PD控制器的相角超前特性。
稳态性能(低频段):增益充分大。
动态性能(中频段): 准确地将超前网络地交接频率1/aT和1/T选在待 校正系统截止频率地两边,并适当选择参数a和 T,使已校正系统地截止频率和相角裕度满足性 能指标地要求,从而改善闭环系统地动态性能。