施耐德运动控制控制模板经验总结
运动控制实训总结

运动控制实训总结标题:运动控制实训总结正文:运动控制是机器人控制技术中的重要组成部分,是机器人实现自主运动的关键。
本次实训旨在让学生掌握运动控制的基本理论和应用技能,为后续的机器人实践应用打下坚实的基础。
在实训过程中,我们按照以下步骤进行:一、学习运动控制基础知识在实训开始前,我们首先学习了运动控制基础知识,包括运动控制算法、传感器和执行器的应用、运动控制系统的建模等内容。
通过学习这些内容,学生了解了运动控制的基本思想和实现方法,为后续的实训操作打下了坚实的基础。
二、进行实验操作在实训过程中,我们按照课程要求进行了多个实验操作,包括使用PID控制算法实现机器人的平滑运动、使用模糊控制算法实现机器人的避障运动、使用神经网络实现机器人的运动预测和控制等。
通过实验操作,学生掌握了不同的运动控制算法和传感器/执行器的应用技巧,并且对运动控制系统的建模和调试有了更深入的理解。
三、进行仿真实验在实验操作的基础上,我们进行了仿真实验,通过搭建运动控制系统并进行仿真测试,验证运动控制算法的性能和效果。
通过仿真实验,学生可以更加直观地了解运动控制系统的运行状况,并对运动控制算法的参数进行调整和优化,以提高系统的性能和可靠性。
四、总结与反思在实训结束后,我们对所有实验操作进行了总结和反思。
通过总结,我们了解到学生在运动控制实训中取得了哪些成果和进步,同时也发现了哪些不足之处。
通过反思,我们提高了学生的实验操作能力和系统调试能力,为今后的机器人实践应用打下了坚实的基础。
拓展:除了本次运动控制实训,学生还可以参考相关书籍、论文和视频教程,进一步深入学习和了解运动控制的相关理论和应用。
同时,学生也可以参加机器人比赛和实践项目,将所学的运动控制技能应用于实际问题中,不断提高自己的机器人控制技术和实践能力。
2.施耐德LMC058运动控制-CANMOTION配置

LMC058配置
一、添加实轴
1.设置使用CAN口的波特率
2.添加Cammotion管理器
3.添加对应的轴设备
在添加轴设备是一定要确保安装了该设备的dtm库,才能找的到。
如果没有可以在工具-》DTM库中添加。
二、添加虚拟轴
虚拟轴有二个作用:第一使用主轴当虚拟轴,其他实轴跟随虚拟主轴运动,这是实际中最常用的方法;第二是用于仿真,除了主轴可以当虚轴外,从轴也也可以用做虚轴。
这样可以用来做仿真。
设置轴
三、配置程序任务
1.添加运动控制程序POU
在运动控制中,常将机器的逻辑控制与机器的运动控制分开,以节省运动控制程
序段的扫描时间,提高运动控制精度。
2.添加Motion任务
3.给Motion程序分配程序断
使用外部事件(can1口的同步信号)周期触发,优先等级设高。
运动控制系统实习报告心得
运动控制系统实习报告心得首先,我要感谢学校为我们提供了这次宝贵的实习机会,让我们能够亲身体验运动控制系统的工作原理和实际应用。
通过这次实习,我对运动控制系统有了更深入的了解,并且收获了许多实践经验。
在实习的第一阶段,我们学习了运动控制系统的理论知识。
通过课堂学习和自学,我了解了运动控制系统的基本组成部分,包括控制器、执行器和传感器。
控制器负责接收输入信号,对信号进行处理,并生成控制信号输出给执行器。
执行器则是根据控制信号进行相应的动作,如电机旋转、伺服阀开口等。
传感器用于检测系统的状态,将信号反馈给控制器,形成闭环控制。
在实习的第二阶段,我们进行了运动控制系统的实验操作。
通过实验,我亲手调整了矢量变频器的参数,并进行了运行测试。
在实验过程中,我学会了如何设置变频器的运行参数,如频率、电压和转矩等。
我还了解了如何通过改变输入信号来控制电机的转速和方向。
这些实践操作让我更加明白了运动控制系统的工作原理和应用场景。
在实习的过程中,我遇到了一些问题。
例如,在调整变频器参数时,我并不知道如何选择合适的参数值。
为了解决这个问题,我查阅了相关资料,并向老师和同学请教。
他们给了我很多宝贵的建议,让我能够顺利地完成实验。
通过这个经历,我学会了如何主动寻找解决问题的方法,并且提高了自己的自学能力。
通过这次实习,我认识到运动控制系统在现代工业中的重要性和广泛应用。
无论是自动化生产线上的机器人,还是智能家居中的智能窗帘,都离不开运动控制系统。
在未来的学习和工作中,我将继续深入研究运动控制系统,并尝试将其应用到实际项目中,为社会的发展做出贡献。
总之,这次运动控制系统实习让我受益匪浅。
通过理论学习和实践操作,我掌握了运动控制系统的基本原理和应用技能。
同时,我也学会了如何主动解决问题,并提高了自己的自学能力。
我相信这次实习经历将对我的未来学习和职业发展产生积极的影响。
施耐德PLC培训总结自动化魏国富.doc
施耐德PLC培训总结自动化魏国富.doc
西安施耐德PLC培训总结
2月28日至3月4日,受中心派遣到施耐德西安分公司进行了为期5填的施耐德PLC培训,本次培训主要内容为Quantum 140PLC 和M340 PLC的硬件知识、Concept编程软件和Unity Pro编程软件知识。
培训总结如下:
一、培训内容
1.Concept编程软件
Concept编程软件是施耐德90年代的产品,适用于Quantum、Momentum、Compact、Atrium四种PLC,软件包包括:编程软件Concept、不同软件版本间的程序转化软件Concept Converter、安全设置软件Concept Security、系统固件升级软件Execloader、DFB 功能块编程软件Concept DFB、PLC程序仿真软件Simulator 32bit。
对于Quantum CPU,只适用于四种型号的CPU:140CPU11302、140CPU11303、140CPU43412A、140CPU53414A,Quantum其它新的CPU,必须采用Unity软件进行编程。
Concept软件主要由硬件配置环境和软件配置环境组成,其中硬件配置环境主要用于系统的硬件配置、通讯及网络配置、热备功能配置等,软件配置环境主要用于变量定义、控制程序的编写、控制程序的上、下载、PLC程序仿真、PLC 程序、变量的导入和导出。
创建一个项目的步骤为:创建一个项目→硬件配置→选择CPU型号→PLC内存分配→文件加载→拓展参数配置、IO MAP配置→数据保护→PEER COP设置→热备设置→通讯端口设置→其他特殊设置→以太网设置→定义变量→创建程序段→创建。
施耐德plc使用技巧精华总结

施耐德plc使用技巧精华总结Schneider-施耐德LEC使用技巧文集[第1讲]——如何用自编的PID算法来实现控制在各类的PLC中,都提供了PID运算指令,但在处理响应要求快的应用中,会发现现有提供的PID运算指令有时效果并不理想,所以用自编的PID算法来实现控制就成了一个解决方案。
以下是PID算法的程序示例:Schneider-施耐德LEC使用技巧文集[第2讲]——ASCII码转换为HEX和BCD码的方法在编制各种程序,尤其是ASCII通讯的应用时,常需要进行数据格式的转换,<例程1>说明ASCII 数据如何转换为HEX及BCD码的数据;<例程2>说明HEX数据如何转换为ASCII 数据。
<例程1>(*ASCII to HEX and BCD *)(* %MW0 = 3139 %MW1 = 3537 => %MW30=16#1957 %MW31=1957 *)LD 1[ %MW0 := 16#3139 ] (* 19 ASCII = 3139 HEXA *)[ %MW1 := 16#3537 ] (* 57 ASCII = 3537 HEXA *)LD 1[ %MW10 := %MW0 AND 16#000F ] (* 16# XXX9 *)[ %MW11 := %MW0 AND 16#0F00 ] (* 16# X1XX *)[ %MW12 := %MW1 AND 16#000F ] (* 16# XXX7 *)[ %MW13 := %MW1 AND 16#0F00 ] (* 16# X5XX *)LD 1[ %MW20 := SHL( %MW10, 8 ) ] (* 16# X9XX *)[ %MW21 := SHL( %MW11, 4 ) ] (* 16# 1XXX *)[ %MW22 := %MW12 ] (* 16# XXX7 *)[ %MW23 := SHR( %MW13, 4 ) ] (* 16# XX5X *)LD 1[ %MW30 := %MW20 OR %MW21 ] (* 16# 19XX *)[ %MW30 := %MW30 OR %MW22 ] (* 16# 19X7 *)[ %MW30 := %MW30 OR %MW23 ] (* 16# 1957 *)LD 1[ %MW31 := BTI( %MW30 ) ] (* 1957 *)<例程2>(* HEX to ASCII *)(* %MW30 = 16#1957 => %MW74 = 3139 %MW75 3537 *) LD 1[ %MW40 := %MW30 AND 16#000F ] (* 16# XXX7 *)[ %MW41 := %MW30 AND 16#00F0 ] (* 16# XX5X *)[ %MW42 := %MW30 AND 16#0F00 ] (* 16# X9XX *)[ %MW43 := %MW30 AND 16#F000 ] (* 16# 1XXX *)LD 1[ %MW50 := %MW40 ] (* 16# XXX7 *)[ %MW51 := SHR( %MW41, 4 ) ] (* 16# XXX5 *) [ %MW52 := SHR( %MW42, 8 ) ] (* 16# XXX9 *) [ %MW53 := SHR( %MW43, 12 ) ] (* 16# XXX1 *)LD 1[ %MW60 := %MW50 OR 16#0030 ] (* 16# XX37 *) [ %MW61 := %MW51 OR 16#0030 ] (* 16# XX35 *) [ %MW62 := %MW52 OR 16#0030 ] (* 16# XX39 *) [ %MW63 := %MW53 OR 16#0030 ] (* 16# XX31 *)LD 1[ %MW70 := %MW60 ] (* 16# XX37 *)[ %MW71 := SHL( %MW61, 8 ) ] (* 16# 35XX *) [ %MW72 := %MW62 ] (* 16# XX39 *)[ %MW73 := SHL( %MW63, 8 ) ] (* 16# 31XX *)LD 1[ %MW74 := %MW72 OR %MW73 ] (* 16# 3139 *) [ %MW75 := %MW70 OR %MW71 ] (* 16# 3537 *)Schneider-施耐德LEC使用技巧文集[第3讲]——Twido PLC做为ASCII从站设备的通讯方法Twido PLC提供有ASCII协议,这样在理论上能使得Twido和其他任何支持串行通讯的设备建立通讯。
施耐德LXM05A面板点动控制与模拟量控制
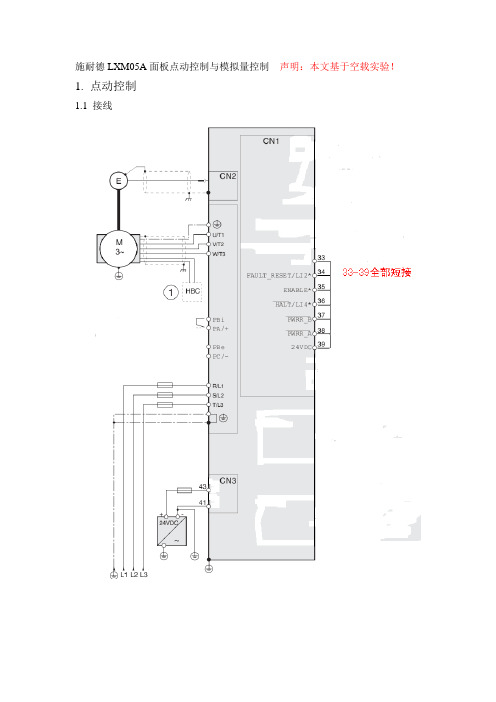
施耐德LXM05A面板点动控制与模拟量控制声明:本文基于空载实验!1.点动控制1.1接线1.2面板操作1.2.1 首次设置1.2.2 恢复出厂设置如果首次设置失误需要回到FSu重新设置,在面板中请进入drC→FSC,选择YES,即可回到FSu.1.3点动操作同时按住箭头按钮和ENT 键电机以高速运行。
2. 模拟量控制2.1接线2.2面板操作2.2.1 转速控制方式(1)将默认运行方式设定为转速控制。
为此要在DRC- / io-n 项下选择Sped 。
(2)应通过ANA1+ 来设定电机转速,当电压为 10V 时,转速为 3000转/ 分钟。
为此要在set- / a1ns 项下选择数值3000 。
(3)通过ANA2+ 来限制电机电流。
为此要在DRC- / A2mo 项下选择Curr 。
(4)当电压为 10V 时,电机电流的限值应为 0.5A 。
为此要在DRC- / A2im 项下选择数值5.00 。
检查电流限制。
请起动电机(输入信号ENABLE)。
将ANA1+ 设定为最大,然后使用ANA2+ 进行限制。
请在sta- / iaCt 项下查看电流值。
检查当前转速。
为此要在sta- / naCt 项下查看数值。
2.2.2 优化(1)自动调整的旋转方向TUN-/DiR/pnh: 首先正转,然后反转且返回到起始位置中(2)调整调节器参数(较硬 / 较软)TUN-/GAiN/100:控制器的硬度单位。
值为 100 相当于理论最佳值。
大于 100 的值表示调节控制比较硬,较小的值则表示控制比较软。
(3)开始优化 TUN-/Strt(按下ENT,开始自动优化)3. PLC编程将ANA1通道输出0-10V(用于转速给定)将ANA2通道输出0-10V(用于限制ANA1,即ANA1≤ANA2)4. 运行重新上电,将PLC RUN,将Enable的开关置ON,电机开始转动,改变ANA1+大小,转速也跟着变化. 将Enable的开关置OFF,电机停止。
运动控制实训报告总结范文

运动控制实训报告总结范文一、引言运动控制是现代工程领域中的一个重要方向,广泛应用于机器人控制、工业自动化、航空航天等领域。
本次实训旨在通过实际操作,提高我们对运动控制的理论知识的理解和应用能力,加深对运动控制系统的工作原理和设计方法的了解。
二、实训内容1. 运动控制理论讲解在实训之初,我们首先接受了相关的理论知识讲解。
通过学习运动控制的基本原理和常见的控制算法,我对闭环控制、速度控制和位置控制等概念有了更加清晰的认识。
2. 运动控制系统设计在实训的第二部分,我们利用软件仿真工具进行了运动控制系统的设计。
通过搭建闭环控制系统模型并进行仿真实验,掌握了运动控制器的设计方法,并深入了解了不同参数对系统性能的影响。
3. 实际控制器配置与调试基于虚拟仿真的系统设计,我们进一步进行了实际控制器的配置和调试。
通过连接电机、编码器和控制器,掌握了运动控制系统的实际搭建流程并对其进行了参数调整和优化,使系统能够实现准确控制。
4. 运动控制系统性能评估在控制系统搭建完成后,我们对其性能进行了评估。
通过对速度和位置误差的分析和测量,以及对实际轨迹和目标轨迹的对比,判断控制系统是否达到设计要求,并进行可能的改进。
三、实训成果通过本次实训,我取得了以下几方面的成果和收获:1. 提高了对运动控制的理论和实际应用的理解。
通过实际操作,我对运动控制的原理、方法和技术有了更深刻的认识,进一步巩固了相关的理论知识。
2. 掌握了运动控制系统的设计和调试方法。
通过实践操作,我了解了运动控制系统的设计流程和调试步骤,提升了自己的工程实践能力。
3. 熟悉了实际控制器的配置和参数调整。
在实际操作中,我掌握了常见的控制器配置方法,并学会了如何根据系统需求进行参数调整和优化。
4. 学会了运动控制系统性能评估方法。
通过对实际控制系统的性能评估,我了解了如何分析系统的误差和偏差,提出改进方案,进一步完善运动控制系统。
四、实训反思本次实训对我来说是一次非常宝贵的学习机会。
施耐德实习报告工作总结

施耐德实习报告工作总结首先,我要感谢施耐德电气公司给我提供了一次难得的实习机会,使我能够在课堂上所学的知识得以实践,对于我个人的专业技能和综合素质的提高起到了很大的帮助。
在这段实习期间,我所在的部门是工艺设备部,与我所学专业工业工程相关。
以下是我在实习期间的工作总结。
一、实习工作内容1. 协助完成导师正在做的项目:我在实习期间参与了导师负责的几个项目,包括设备工艺优化、生产流程改进等。
我主要负责收集和整理项目相关数据,分析数据并给出改进建议。
2. 定期与导师沟通:我需要定期与导师进行沟通,汇报工作进展,接受任务和指导。
这使我更加明确了工作目标和工作方向,提高了工作效率。
3. 完成布置的任务:在实习期间,导师给我布置了一些任务,如设备操作培训、生产现场观测等。
我认真完成了这些任务,并得到了导师的认可。
4. 任务指导和点评:在完成任务的过程中,导师对我的工作进行了指导和点评,指出了我的不足之处,并给予了我很多宝贵的建议。
这使我更加明确了自身需要提高的地方,为今后的学习和工作打下了基础。
二、实习收获1. 高含金量推荐信:实习结束后,我获得了导师的高含金量推荐信,这对于我今后的求职和职业发展具有很大的帮助。
2. 企业邮箱支持:实习期间,我获得了施耐德电气公司的企业邮箱,这使我能够更好地与公司保持联系,了解公司的最新动态。
3. 实践经验积累:通过实习,我将课堂所学知识运用到了实际工作中,积累了一定的实践经验,对于我今后的学习和工作具有很大的指导意义。
4. 职业素养提升:实习期间,我深刻体会到了企业文化的重要性,锻炼了自己的团队协作能力、沟通能力和解决问题的能力,使自己的职业素养得到了很大提升。
三、实习总结通过这次实习,我深刻认识到了实践对于理论的重要性,只有将所学知识运用到实际工作中,才能真正掌握和理解。
同时,我也认识到了自身的不足之处,需要在今后的学习和工作中努力提高自己。
最后,我要感谢施耐德电气公司给我提供的一次宝贵实习机会,使我受益匪浅。
施耐德实习总结
施耐德实习总结时光飞逝,不知不觉的就走完了大一的路程。
又是一个长期的暑假,在学校领导和老师的安排下,我们迎来了大学里第一个暑期社会实践,带着惊奇、带着欢喜,我们迫不及待将要揭开‘她’奇幻的面纱??期末考试结束后,我们组8个成员便积极开始了我们的暑期社会实践,时间为期一个星期,我们非常荣幸地联系到施耐德这家颇有名望的公司并给予我们宝贵的参观学习机会,由于我们电气专业与这家公司联系紧密,因此,我们更加期待这一次的实践,希望通过这次实践能初步了解我们专业今后的动向和发展,另外,能进公司参观学习可以扩大我们的视野,同时,让我们体验公司运作的氛围。
为更进一步了解施耐德电气公司,我搜集了如下部分资料:全球能效管理专家施耐德电气为100多个国家的能源及基础设施、工业、数据中心及网络、楼宇和住宅市场提供整体解决方案,其中在能源与基础设施、工业过程控制、楼宇自动化和数据中心与网络等市场处于世界领先地位,在住宅应用领域也拥有强大的市场能力。
致力于为客户提供安全、可靠、高效的能源,施耐德电气XX年的销售额为224 亿欧元,拥有130,000 名员工。
XX年财富世界500强排行榜排名第353位。
公司旗下拥有三大国际著名品牌:Merlin Gerin、SquareD和Telemecanique。
自1836年成立以来,施耐德电气一直是法国的工业先锋之一。
中国改革开放的总设计师邓小平同志早年在法国留学时,就曾在施耐德电气前身的工厂工作过。
80年代起,施耐德电气逐渐脱离了非电力业务,将战略重点重新聚焦于电气领域。
施耐德电气XX年全球销售额超过亿欧元,在全世界130多个国家拥有84,866名员工,197家工业公司、150个客户服务中心及9000多个销售点。
施耐德电气于年进入中国,目前在华已经拥有6000名员工,4个分公司,42个地区办事处,14家生产型企业,4个物流中心,2个培训中心和1个全球研发中心,400多家代理商和全国性的销售网络。
施耐德LXM05A面板点动控制与模拟量控制
施耐德LXM05A面板点动控制与模拟量控制声明:本文基于空载实验!1.点动控制1.1接线1.2面板操作1.2.1 首次设置1.2.2 恢复出厂设置如果首次设置失误需要回到FSu重新设置,在面板中请进入drC→FSC,选择YES,即可回到FSu.1.3点动操作同时按住箭头按钮和ENT 键电机以高速运行。
2. 模拟量控制2.1接线2.2面板操作2.2.1 转速控制方式(1)将默认运行方式设定为转速控制。
为此要在DRC- / io-n 项下选择Sped 。
(2)应通过ANA1+ 来设定电机转速,当电压为 10V 时,转速为 3000转/ 分钟。
为此要在set- / a1ns 项下选择数值3000 。
(3)通过ANA2+ 来限制电机电流。
为此要在DRC- / A2mo 项下选择Curr 。
(4)当电压为 10V 时,电机电流的限值应为 0.5A 。
为此要在DRC- / A2im 项下选择数值5.00 。
检查电流限制。
请起动电机(输入信号ENABLE)。
将ANA1+ 设定为最大,然后使用ANA2+ 进行限制。
请在sta- / iaCt 项下查看电流值。
检查当前转速。
为此要在sta- / naCt 项下查看数值。
2.2.2 优化(1)自动调整的旋转方向TUN-/DiR/pnh: 首先正转,然后反转且返回到起始位置中(2)调整调节器参数(较硬 / 较软)TUN-/GAiN/100:控制器的硬度单位。
值为 100 相当于理论最佳值。
大于 100 的值表示调节控制比较硬,较小的值则表示控制比较软。
(3)开始优化 TUN-/Strt(按下ENT,开始自动优化)3. PLC编程将ANA1通道输出0-10V(用于转速给定)将ANA2通道输出0-10V(用于限制ANA1,即ANA1≤ANA2)4. 运行重新上电,将PLC RUN,将Enable的开关置ON,电机开始转动,改变ANA1+大小,转速也跟着变化. 将Enable的开关置OFF,电机停止。
施耐德控制器操作方法

施耐德控制器操作施耐德控制器(CD12,XD26系列)一、设定画面停留时间操作如下:3个画面停留时间设定按A键进入画面: 10 motors ProgramT1: 00015 ST2: 00015 ST3: 00015 S此时光标在T1:00015 S处闪动,如果需修改时间,请按O K键进入此时T1:00015 S数字在跳动,如需调整,按+后,再按O K键确认光标闪动,此时已设定好T1时间。
如想调整T2时间按+键或T2:000 15 S处,其它操作如T1设定,T3设定也一样。
待画面停留时间调整后按A键返回主模式二、设定每天早上、晚上的开机时间和关机时间操作如下:按ES C键进入模式: MACRO 000 FBD 062TIME PROG WEEKLY 早上开机时间n:00 07:00 OND:MTWTFSS W:12345此时光标在062处闪动,如果需修开机时间,按+键把光标移至07:00处内动按O K键,此时07在跳动按+再按O K键确认光标在闪动,此时已设定好早上开机时间。
如想调整晚上关机时间操作如下:在原来的早上开机时间下一直按+键至出现以下模式:MACRO 000 FBD 062TIME PROGn:01CHOSE EVENT此时没有光标闪动按O K键进入模式: MACRO 000 FBO 062TIME PROG WEEKLYn:01 23:00 OFF 关机时间 D:MTWTFSS W:12345此时光标在n:01开机时间设定操作一样。
待早上,晚上的开机时间和关机时间调整后按ES C注:施耐德控制器在控制面板中可调程序为以上两种,其他均不能调动。
运动控制装置课程设计个人总结
运动控制装置课程设计个人总结在本次运动控制系统课程设计中,我收获了很多。
对所学的很多课程有了系统的了解以及其应用。
我们组设计的作品为“寻迹小车”,以及简易上位机、web端可视化网页,构成了下位机-上位机/客户端-web的完整框架结构,具备远程操纵和查询的功能。
就下位机而言,主要是由stm32作为处理器,实现小车的PID调节、外接设备IO、串口通讯等控制和处理功能,以直流电机作为驱动,并由两节干电池作电源。
其中,我对PID这种调节规律在实际项目中的运用有了更深层次的理解,比如微分环节能使系统超前作用,但微分系数不宜过大,否则小车会产生振荡不稳定现象,即书上所说的超调量增大。
一般会把比例作用设置大一些,积分小很多,微分作用可看具体情况添加甚至可为0。
另一个就是电机调速里最重要的实现方法——PWM脉宽调制,实际上就是通过改变矩形波占空比而改变了电压输出的有效值,从而调节电机转速。
这很有意思,通过编程能该百年硬件上的特性,充分体现了软硬件一体的思想。
我主要负责的是上位机,即基于QTcreator的简易寻迹小车GUI 程序开发,写这个软件难度远比我预料的要大,一方面QT creator网上的实例比较少,找“轮子”很难找,不得不硬着头皮造轮子,这就很麻烦。
首先是QT和mysql的连接就耗费了大量时间,反复安装mysql都未得到解决。
后来发现mysql的位数必须与QT编译器的位数一致,我原以为是一致的,因为我电脑就是64位。
没想到老师发给我们QT是32位的,位数不一致导致一直连接不成功。
在解决了mysql和QT连接后,遇到了数据类型转换的难点。
比如QString和Qbytearray,以及int、double型互换比c语言要麻烦。
主要是因为QBytearray是字节型。
还有怎么查询到mysql表中已经存在的记录总数,然后才能进行添加…总之,诸如此类的细节问题遇到还挺多。
网页部分我主要是把mysql数据库写入就可以了,参与不多。
施耐德实习总结

施耐德实习总结一、在施耐德的日子作为销售实习工程师,我在施耐德做了不少事情。
N次访谈:其实正式的访谈只有跟肖经理才算是,但是私底下来说,我跟几乎整个OEM部门的销售(除了女销售)有深入交流的,特别是广州和佛山,顺德的,私底下的交流一般都超过3次,恐怕也只就是那几个女销售我接触很少。
我很喜欢主动去找那些销售和PAE聊天,因为一方面能够在他们身上得到宝贵的资料,不仅仅是产品信息,行业领域的,甚至有些职场经历和个人人生感触都有分享。
感谢他们能够在忙碌之余,也给我们足够的指导。
感谢他们,我对施耐德产品和市场了解之余,对销售的流程和内部做法都有很清晰的了解。
田野教会我很多,但是我自觉直接跑客户时接触看到的更实际和深刻。
这四周跑分销商和客户:中正——白洪彬,陈经理,李秋生,认识接触过七八个人,人都还不错,名片都一沓了中正熟的要命,据说2000年跟施耐德就有合作,我自己一个人都来过很多次了,认识的人也很多,他们怎么操作跟客户怎么打交道都混熟了。
三川电工——吴带金,麦成彬等几个销售比较熟,新发展的分销商,不甚了解,但是上次跟老外出去跟他们谈,好像讲的自己很牛,其实是有一定实力,但实力有限。
其他分销商我就没接触过,但通过接触这些分销商,我也知道了他们的模式和我们跟他的合作模式,都记在以前的周记里,这里就不写了。
科达机电——跟田野跑了N次,后来杨华军也过来跑,大客户摩德娜(依莲华)——跟田野和市场部老外和朱袆也一起跑,主要做国外市场中窑——跟田野跑过两次,第二次也跟朱袆,老外一起。
但据说中窑是行业的搅局者,接单越多,死的越快(上次在欧泰科跟几个行业里面的老总在谈行业趋势)明协陶机——中正陈树佳经理——自己去中正东赞纸箱机械——中正——跟涂江跑欧泰科陶瓷设备——中正——自己跟分销商销售跑,跟客户聊天,了解到很多行业最新信息东莞豪力机械——实习生四人与赵经理一起跑我对这些客户都有一定的了解很感悟,都记在周记里。
其他自己查资料,学习,每周一参加技术培训行业调查和一些琐碎的调查工作,实习生一起做的。
施耐德运动控制功能块说明

基于Motion Pro的Motion Function Block 说明3、运动控制功能块说明3.1 MC_Power伺服轴使能,这个功能块包含在SM_PLCopen.lib的库文件中。
3.2 MC_MoveVelocity伺服轴速度控制,这个功能块包含在SM_PLCopen.lib的库文件中。
3.3 MC_Stop伺服轴以指定的减速时间停车,这个功能块包含在SM_PLCopen.lib的库文件中。
时序图如下:如果电机没有减速到零,或者MC_Stop的Execute管脚信号为ON,其他任何运动命令都将被忽略。
3.4 MC_ResetAxis这个功能块包含在SM_PLCopen.lib的库文件中,复位伺服轴故障,使伺服轴从故障停车状态(ErrorStop)进入停止且无故障状态(Standstill),这个功能块包含在SM_PLCopen.lib的库文件中。
3.5 MC_SetPosition Gearin模式下是否可以用?这个功能块包含在SM_PLCopen.lib的库文件中,改变伺服轴当前位置值(重新标定伺服轴位置),这个功能块不会使伺服轴产生附加运动。
伺服轴在运动中也可以调用本功能块,不会改变当前运动的目标定位位置,但是,由于伺服轴当前值已改变,当前运动任务会根据MC_SetPosition执行之后重新标定的伺服轴位置来计算运动轨迹。
当Mode=False(默认值,绝对位置控制)时,伺服轴新的当前值会更改成Position管脚对应的数值。
当Mode=True (相对位置控制)时,伺服轴新的当前值会更改成伺服轴当前值+Position管脚对应的数值。
3.6 MC_GearIn伺服轴进入电子齿轮模式修改齿轮比的执行时序图:3.7 MC_Gearout伺服轴退出电子齿轮模式MC_Gearout的Done管脚必须连接到MC_Stop的Execute管脚(如下图),否则,从轴将以MC_Gearout执行时刻的电机转速一直运行下去。
施耐德运动控制控制模板经验总结
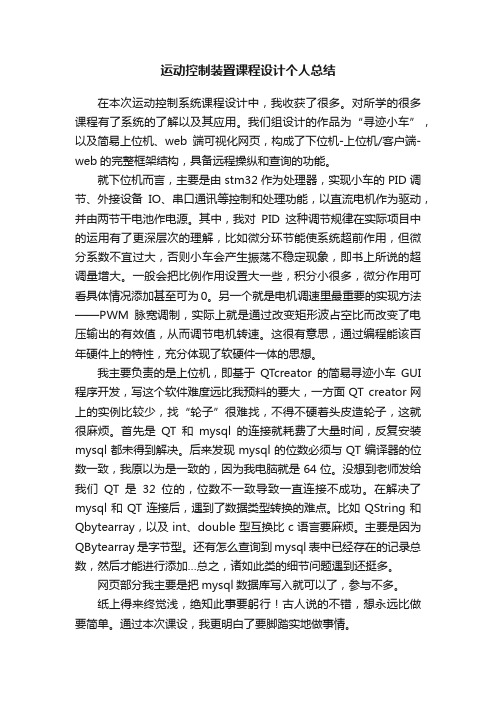
以施耐德公司的位置控制模板TSXCAY系列为例:如图所示:9针D型阳插座输出4路模拟信号,可以控制4台驱动器。
15针D型插座接收反馈信号。
反馈信号可以是绝对编码SSI或增量编码RS422。
它们的电源由外部提供。
电源可以是5V或24V。
外部电源由HE10型插座接入。
如图示说明:TSXCAY位置控制单元还集成了基本的输入/输出端子,使得在运动控制过程中更加完善了它的控制功能,例如:原点开关,位置限位,事件开关等,电源也由此输入。
如图所示:I0: 原点开关I1: 紧急停止开关I2: 事件开关I3: 自较正开关Q0:辅助输出下面就是一个在通道0 实际连接的例子。
PO是原点开关,用于程序中的寻原点的执行。
FCD,FCG,AT_UR都是紧急停止开关。
EVT是一个事件开关,可以在程序中进行中断情况的处理。
REC可以是自校正的处理开关。
另外,TSXCAY还集成了对驱动单元的管理功能,例如,驱动器的使能,驱动器出错的报警等。
如图示:COMx, VALVARx为输出到相应驱动器的使能控制。
OK_VARx 为驱动器正常工作的输入信号。
连接如图:TSXCAY 驱动器综上所述,所有这些硬件构成了位置控制的最基本要素,无论是哪家的产品,结构都基本如此。
2.3 脉冲输出的位置控制结构如上图所示脉冲输出对位置的控制,结构简捷,不需要来自电机或驱动器的反馈。
运动的位置取决于驱动器接收的脉冲数,运动的速度取决于脉冲的频率。
对电流,速度,位置的调节都在驱动器里。
它可以实现对位置的点到点的控制和同步跟随控制。
2.4 典型的硬件结构如图所示以施耐德公司的步进控制模板TSXCFY系列为例15针D型插座输出脉冲信号,使能信号。
同时也接收来自驱动器的运行状态信号。
连接结构如下图所示:TSXCFY 驱动器在TSXCFY模板中也集成有基本的输入/输出点,这些输入/输出点构成了运动控制的完整功能。
如限位,原点等。
它们的功能分布如图所示:这些输入/输出点的连接,都是通过HE10端子连接的,通过这些I/O点,实现了对运动过程中,原点的定位,紧急停车及事件的中断处理。
施耐德运动控制控制模板 经验总结

以施耐德公司的位置控制模板TSXCAY系列为例:如图所示:9针D型阳插座输出4路模拟信号,可以控制4台驱动器。
它们的电源由外RS422或增量编码针15D型插座接收反馈信号。
反馈信号可以是绝对编码SSI HE1024V5V部提供。
电源可以是或。
外部电源由型插座接入。
如图示说明:输出端子,使得在运动控制过程中更加完善了它的位置控制单元还集成了基本的输入/TSXCAY 控制功能,例如:原点开关,位置限位,事件开关等,电源也由此输入。
如图所示:原点开关I0:紧急停止开关I1:事件开关I2:自较正开关I3:辅助输出Q0:实际连接的例子。
下面就是一个在通道0是原点开关,用于程序中的寻原点的执行。
PO AT_UR都是紧急停止开关。
,FCDFCG,是一个事件开关,可以在程序中进行中断情况的处理。
EVT REC可以是自校正的处理开关。
还集成了对驱动单元的管理功能,例如,驱动器的使能,驱动器出错的报警TSXCAY另外,等。
如图示:COMx, V ALV ARx为输出到相应驱动器的使能控制。
为驱动器正常工作的输入信号。
OK_V ARx连接如图:TSXCAY驱动器综上所述,所有这些硬件构成了位置控制的最基本要素,无论是哪家的产品,结构都基本如此。
3 脉冲输出的位置控制结构2.如上图所示脉冲输出对位置的控制,结构简捷,不需要来自电机或驱动器的反馈。
运动的位置取决于驱动器接收的脉冲数,运动的速度取决于脉冲的频率。
对电流,速度,位置的调节都在驱动器里。
它可以实现对位置的点到点的控制和同步跟随控制。
典型的硬件结构2.4如图所示TSXCFY以施耐德公司的步进控制模板系列为例D针型插座输出脉冲信号,使能信号。
同时也接收来自驱动器的运行状态信号。
15连接结构如下图所示:驱动器TSXCFY输出点构成了运动控制的完整功//在TSXCFY模板中也集成有基本的输入输出点,这些输入能。
如限位,原点等。
它们的功能分布如图所示:点,实现了对运动过程中,I/O输出点的连接,都是通过HE10端子连接的,通过这些这些输入/ 原点的定位,紧急停车及事件的中断处理。
运动控制课程设计心得总结
运动控制课程设计心得总结一、课程目标知识目标:使学生掌握运动控制的基本原理,理解运动控制系统中各组成部分的作用及其相互关系;掌握基本的运动控制算法,并能运用到实际问题的解决中。
技能目标:培养学生运用所学知识,设计简单的运动控制系统,提高学生的动手实践能力和问题解决能力;通过课程学习,使学生具备对运动控制系统进行分析、调试和优化的能力。
情感态度价值观目标:激发学生对运动控制技术的兴趣,培养学生主动探究、积极思考的学习态度;强调团队协作,提高学生的沟通与协作能力;通过课程学习,使学生认识到运动控制技术在工业生产和国防建设中的重要性,增强学生的社会责任感和使命感。
课程性质分析:本课程属于工程技术类课程,注重理论与实践相结合,强调学生的动手实践能力。
学生特点分析:根据学生所在年级的特点,他们在前期的学习中已具备一定的物理、数学和工程基础,对运动控制有一定了解,但尚未深入掌握运动控制系统的设计与实践。
教学要求:结合课程性质和学生特点,将课程目标分解为具体的学习成果,使学生在理解基本原理的基础上,能够运用所学知识解决实际问题,注重培养学生的实践操作能力和团队协作精神。
后续教学设计和评估将以此为基础,确保课程目标的实现。
二、教学内容根据课程目标,教学内容主要包括以下几部分:1. 运动控制基本原理:涵盖运动控制系统的组成、类型和性能指标,介绍运动控制的基本算法,如PID控制、模糊控制等。
2. 运动控制系统设计:包括控制系统建模、控制器设计、执行器设计等,结合实际案例,使学生掌握运动控制系统设计的方法和步骤。
3. 运动控制系统实践:组织学生进行运动控制实验,提高学生的动手实践能力,包括实验原理、实验设备、实验步骤和实验结果分析。
4. 运动控制系统应用案例分析:分析典型运动控制系统的应用案例,使学生了解运动控制在工业生产、机器人、航空航天等领域的实际应用。
教学大纲安排如下:1. 第一章:运动控制基本原理(2课时)- 1.1 运动控制系统的组成与类型- 1.2 运动控制系统的性能指标- 1.3 常见运动控制算法介绍2. 第二章:运动控制系统设计(4课时)- 2.1 控制系统建模方法- 2.2 控制器设计原理- 2.3 执行器设计方法- 2.4 运动控制系统设计实例分析3. 第三章:运动控制系统实践(4课时)- 3.1 运动控制实验原理- 3.2 实验设备与实验步骤- 3.3 实验结果分析与应用4. 第四章:运动控制系统应用案例分析(2课时)- 4.1 工业生产中的应用案例- 4.2 机器人领域的应用案例- 4.3 航空航天领域的应用案例教学内容注重科学性和系统性,结合教材章节和实际案例,使学生能够系统地掌握运动控制相关知识,为后续学习和实践打下坚实基础。
施耐德知识点总结

施耐德知识点总结施耐德的业务涵盖能源管理和自动化两大领域。
在能源管理领域,该公司提供一系列的产品和解决方案,包括电力配电、能效管理、智能建筑和智能家居等产品。
在自动化领域,施耐德提供一系列的自动化产品和解决方案,包括工业自动化、过程控制、机器人技术和数字化工厂等产品。
施耐德在能源管理和自动化领域拥有丰富的经验和专业知识,其产品和解决方案在全球范围内得到了广泛的应用和认可。
该公司致力于为客户提供高品质、高性能和高可靠性的产品和解决方案,为客户创造持久的价值。
施耐德的产品和解决方案涵盖了多个领域和行业,其产品涉及到电力传输与分配、自动化控制、能效管理、建筑自动化、工业自动化、数据中心和电气安全等方面。
该公司的产品和解决方案派生了许多专业知识和技术,这些知识和技术对于客户的业务运营和发展具有重要的意义。
关于施耐德的知识点总结,可以从以下几个方面进行详细介绍:1. 能源管理领域的知识点在能源管理领域,施耐德提供了一系列的电力传输与分配产品和解决方案。
这些产品和解决方案涵盖了输电线路、变电站、配电柜、低压开关设备和智能化电气产品等方面。
施耐德的电力传输与分配产品和解决方案广泛应用于建筑、能源、基础设施和工业等领域,为客户提供安全、可靠和高效的电力传输与分配服务。
此外,施耐德在能效管理领域也提供了一系列的产品和解决方案,包括能效监测、能效管理、能效改进和能效优化等产品。
这些产品和解决方案可以帮助客户实现能效管理目标,提高能源利用效率,降低能源消耗,减少能源浪费,创造经济效益和环保效益。
在智能建筑和智能家居领域,施耐德提供了一系列的产品和解决方案,包括建筑自动化系统、智能家居系统、能源管理系统和照明控制系统等产品。
这些产品和解决方案可以帮助客户实现建筑智能化管理,提高建筑物的舒适性、安全性和能效性,为用户提供愉悦的生活和工作环境。
2. 自动化领域的知识点在自动化领域,施耐德提供了一系列的工业自动化产品和解决方案,包括工业控制系统、工控机器人、工业通信设备和数字化工厂等产品。
施耐德变频器操作和故障分析报告

现相线故障。
机有无相线故障。
启用 ( 输出相线故障检测 )。
0p1
000A 在加速中出现过
输入电压异常波动。
加装一个合适的输入电抗
电压
(1) 电源容量为 200kVA 或 器。
更高。
使用 f301( 自动重起动 ) 和
(2) 某个功率因数改善电容器
F302 ( 惯性通过控制 )。
被开路或闭合。
(3) 在同一动力配电线上连接
自动调整
自动调整正在进行
如果此消息在几秒钟后消失,则为正
常。
H999
整体输入功率
整体输入功率大于
当电源断开或当输入端子功能 CKWH
999.99kWh 。
被接通或显示时, 按下此键并保持 3 秒
钟或更长时间。
H999
整体输出功率
整体输出功率大于
当电源断开或当输入端子功能 CKWH
999.99kWh 。
在短时停机等情况之后, 一
检查 V/F 参数设置。
个重起动信号被输入到转动
使用 F301( 自动重起动 )
着的电机中。
和 F302( 惯性通过控制 )。
负载过大。
使用额定值较大的变频
器。
0l2
000E 电机过载
V/F 设置不当。
检查 V/F 参数设置。
电机被锁定。
检查负载 ( 已运行的机器 )。
持续进行低速运行。
连
能被激活。
高到下限频率 (LL) +0.2Hz 以上, 或者
续运行而自动停机。
关闭运行命令。
参数正在初始化
参数正在被初始化为默认
如果此消息在一段时间 (几秒到几十
值。
运动控制系统心得体会
运动控制系统心得体会运动控制系统是一种通过控制运动装置的运动状态的系统,广泛应用于各个领域,如机械制造、机器人、汽车行业等。
经过这段时间的学习和实践,我对运动控制系统有了更加深入的理解和体会。
首先,运动控制系统的设计和调试是一个相当复杂的过程。
在设计过程中,我们需要考虑运动装置的运动方式、运动速度、运动精度等因素。
同时,还需要根据实际需求选择合适的传感器和执行器。
在调试过程中,我们需要对控制算法进行优化,以提高系统的性能和稳定性。
这些工作都需要经验和专业知识的支持。
因此,我认为在设计和调试运动控制系统时应该注重理论与实践相结合,不断学习和积累经验,以提高技术水平和解决问题的能力。
其次,运动控制系统的性能对于运动装置的运动效果和生产效率具有重要影响。
一个良好的运动控制系统能够使运动装置运动起来更加平稳、准确,并且能够实现复杂的运动轨迹。
这不仅能提高产品的质量和可靠性,还能提高生产效率和降低成本。
因此,在运动控制系统的设计和调试过程中,我们应该注重对控制算法的优化和对硬件设备的选择。
只有通过不断优化和改进,才能提高系统的性能,满足实际需求。
再次,运动控制系统的故障诊断和排除是一个非常关键的环节。
在实际运行中,由于各种原因,运动控制系统可能会出现故障,导致运动装置无法正常运行。
这时,我们需要通过故障诊断和排除来找到问题的原因,并采取相应的措施进行修复。
因此,在平时的工作中我们应该注重对运动控制系统的日常维护和保养,及时发现和处理问题,以降低故障的发生率和影响。
最后,运动控制系统的发展是一项持久而繁重的任务。
随着科技的不断进步和行业的发展,运动控制系统也在不断地发展和改进。
新的传感器、执行器和控制算法的出现,为运动控制系统带来了更多的可能性和挑战。
因此,我们应该保持对新技术和新方法的学习和研究,不断提高自身的技术水平和创新能力。
只有不断追求进步,才能适应社会的发展和满足人们日益增长的需求。
总之,运动控制系统是一项需要理论和实践相结合的技术工作,需要不断学习和积累经验,才能设计出性能优良、稳定可靠的系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以施耐德公司的位置控制模板TSXCAY系列为例:如图所示:9针D型阳插座输出4路模拟信号,可以控制4台驱动器。
15针D型插座接收反馈信号。
反馈信号可以是绝对编码SSI或增量编码RS422。
它们的电源由外部提供。
电源可以是5V或24V。
外部电源由HE10型插座接入。
如图示说明:TSXCAY位置控制单元还集成了基本的输入/输出端子,使得在运动控制过程中更加完善了它的控制功能,例如:原点开关,位置限位,事件开关等,电源也由此输入。
如图所示:I0: 原点开关I1: 紧急停止开关I2: 事件开关I3: 自较正开关Q0:辅助输出下面就是一个在通道0 实际连接的例子。
PO是原点开关,用于程序中的寻原点的执行。
FCD,FCG,AT_UR都是紧急停止开关。
EVT是一个事件开关,可以在程序中进行中断情况的处理。
REC可以是自校正的处理开关。
另外,TSXCAY还集成了对驱动单元的管理功能,例如,驱动器的使能,驱动器出错的报警等。
如图示:COMx, VALVARx为输出到相应驱动器的使能控制。
OK_VARx 为驱动器正常工作的输入信号。
连接如图:TSXCAY 驱动器综上所述,所有这些硬件构成了位置控制的最基本要素,无论是哪家的产品,结构都基本如此。
2.3 脉冲输出的位置控制结构如上图所示脉冲输出对位置的控制,结构简捷,不需要来自电机或驱动器的反馈。
运动的位置取决于驱动器接收的脉冲数,运动的速度取决于脉冲的频率。
对电流,速度,位置的调节都在驱动器里。
它可以实现对位置的点到点的控制和同步跟随控制。
2.4 典型的硬件结构如图所示以施耐德公司的步进控制模板TSXCFY系列为例15针D型插座输出脉冲信号,使能信号。
同时也接收来自驱动器的运行状态信号。
连接结构如下图所示:TSXCFY 驱动器在TSXCFY模板中也集成有基本的输入/输出点,这些输入/输出点构成了运动控制的完整功能。
如限位,原点等。
它们的功能分布如图所示:这些输入/输出点的连接,都是通过HE10端子连接的,通过这些I/O点,实现了对运动过程中,原点的定位,紧急停车及事件的中断处理。
实际的连接如下图:2.5 运动控制的软件编程设计各个伺服产品供应商都为自己的产品配上了相应的控制软件,有的集成在PLC软件中,有的集成在CNC软件中,有的自成体系。
但就其编程规律和所要完成的目标基本是一致的。
我们以施耐德PREMIUM PLC中的编程语言PL7为例,说明运动控制系统的编程设计。
2.5.1运动控制系统的配置由于运动控制模板是挂在PLC机架上,因此,在对它进行编程时,首先要对它的参数进行组态,以满足实际要求。
在一个CPU机架上, 我们配置位置控制模板CAY21.点击CAY21,出现如下画面:点击下拉菜单,选择”Position control”。
出现如下画面:Units: 单位,在此点击下拉菜单,选择合适的单位,如:MM(毫米)等。
Initial resolution: 初始分辨率,Distance:长度距离; Counts:脉冲数。
初始分辨率取决于编码器的分辨率。
它通常不是一个整数。
它是一个比例数,表述为:初始分辨率=长度( Distance)/脉冲数(Counts)。
式中:长度(Distance)指运动物体走过的距离。
脉冲数(Counts)指对应于走过的距离,编码器发出的脉冲数。
例如:电机转一圈发出512个脉冲,对应走过的长度为10000微米,因此,初始分辨率为10000/512=19.5微米。
Encoder type: 编码器类型,可以选择增量编码或绝对编码。
Inversion: 对模拟量输出或测量输入进行反向,从而不用改动硬件连接就可以定义某一方向为正向。
Sequence control: 此参数用于定义分段运动不停止(G01,G11,G30)时的跟随顺序。
Hi limit: 正向位置限制值。
Lo limit: 反向位置限制值。
Max. speed: 最高速度限制。
Max. setpoint: 最高模拟量输出值。
Max.acc. Vmax: 最快加速时间。
Event: 事件的使能,选择事件有效,则遇到事件触发就进入中断程序。
Event input: 事件触发形式选择。
Reference point: 寻原点方式选择。
Recalibrate: 自校正位置,防止累计误差。
按以上原则,填好参数,点击最上面的‘对钩’栏,如无错误,配置就完成了。
如下图:完成对系统的组态后,我们就可以编写程序了。
2.5.2 运动控制命令的编写在PL7中,运动控制的编程语言为: SMOVE %CHxy.i (N_Run,G9_,G,X,F,M)%Chxy.i: 轴控模块在PLC组态中的地址。
x:机架号y:轴控模块在机架上的位置i:轴通道号如上图,机架号为零,x=0CAY21占用的槽位是2号,所以地址是%CH2.0和%CH2.1两个轴通道。
N_Run:0- 32767, SMOVE功能执行的任务标号,在调试方式下用以确认当前的动作所属。
G9_:运动动作类型标识90:运动到一个绝对位置。
91:运动到一个与当前位置相关的相对位置。
98:运动到一个与存储位置PREF相关的相对位置。
(用指令码G07来存储PREF位置值)60:沿指定方向的绝对运动(只在无限轴)。
68:沿指定方向运动到一个与存储位置PREF相关的相对位置。
(只在无限轴)G:指令码09:运动到位置并停止01:运动到位置且不停10:运动到触发事件点并停止11:运动到触发事件点且不停止14:寻原点05:等待事件07:当事件触发时存储当前位置62:强制原点21:无限轴运动中的动态参考点设置04:停止运动指令码图示如下:X:对应要到达的位置。
这个位置可以是立即数,也可以是双字变量%MDi,内部常数%KDi 。
这里需要注意,当使用指令G14和G62时,此时X值表示:要设定的原点位置。
长度单位是在组态中设定的单位。
F:运动的速度,这个速度可以是立即数,也可以是双字变量%MDi和常量%KDi。
速度值的选取在10到最大值之间。
单位取决于长度单位。
速度单位=U*1000/min, 式中U为长度单位。
例如:长度单位为:mm,速度单位=mm*1000/min--> m/minM:事件处理设置,辅助输出设置。
它是由4个半字节组成的16进制码,16# 3 2 1 0当第12位:设为1,则事件触发指令G10,G11,G05,G07有效。
设为0,则事件触发指令无效。
第二组半字节用于在G01,G09,G10,G11指令时设置相关通道的辅助输出。
这组半字节为:0:Unchanged: 输出无变化。
1:synchronized with mvt: 指令开始执行时,输出状态定义。
2:consecutive to mvt: 指令执行结束时,输出状态定义。
第0组半字节用于定义输出的高/低有效。
0:定义输出为“0”。
1:定义输出为“1”。
对于事件指令G05,用第13位来定义:第13位:0:等待时间中断或一个事件。
1:等待位置刷新中断。
例子:16#0101:表示事件触发中断无效,当执行SMOVE指令时,辅助输出为 1。
16#1201:表示事件触发中断有效,SMOVE指令执行结束,辅助输出为 1。
此M码通过选择Auxiliary discrete output 列出的选项,自动完成设置。
如图所示2.5.3 基本运动命令的使用最基本运动•运动到一个位置(指令码 01,09),•一直运动到一个事件触发(指令码11,10),•寻原点(指令码14)。
在编写这些程序时,我们要写出要到达的位置及运动速度,加减速参数在组态中设置(矩形,三角形,梯形)。
例1:相对于原点走一绝对定长,位置=50000,速度=1000。
(类型:90)例2:相对目前位置走一定长,长度=40000,速度=1000。
(类型:91)例3:相对于存储器PREF1内位置走一定长,定长=30000,速度=1000。
(类型:98)存储器PREF1内位置由G07指令设置。
在无限轴的应用中,不论当前位置和目标位置怎样,它总是可以从正向或反向到达目标。
也就是说,有3种方式可以完成从A点到B点的运动。
•正向走到位置。
(Movement 1)•反向走到位置。
(Movement 2)•最短的运动距离,由位控模块决定运动方向。
或由速度符号决定运动方向。
(Movement 3)所以,无限轴的运动可以如下编程:例4:相对于原点的最短距离运动,到达位置(类型:90)。
在这种情况下,最短运动距离决定运动方向。
例5:按设置方向运动,到达位置(类型:60)。
在这种情况下,速度符号定义了方向。
例6:点到点,到位置后停止一直运动到触发事件的输入(指令码:10,11)指令 G11,G10 非常类似于指令G01,G09, 只不过是遇到事件触发,指令结束。
(或者,没有碰到事件触发,而到达设定位置,使指令结束。
)这些事件EVENT的触发•可以是从相关通道的事件输入端输入的上升沿或下降沿。
(这取绝于在EVENT 选项中的组态。
)•也可以是由程序产生的上升沿 EXT_EVENT 位 (%Qxy.i.10),它是由位置参数决定的。
当一直没有碰到事件触发,而且到达这个位置,则指令就结束了。
当M参数的第12位被设成“1”则碰到事件触发就可以启动一个事件处理程序。
例7:一直运动到触发事件,但不停止运动例 8:一直运动到触发事件,并停止.编简单的加工指令一个简单的加工指令如下:G32,G30 通常用来建立一个简单加工轮廓,它包括:•用指令G32 定义趋进速度。
•用指令G30 定义加工速度和目标位置。
例9:起始速度1000,然后加工到位置5000000时,速度为500。
寻原点程序的编制:寻原点指令如下:根据寻原点方式,运动轴找原点开关或编码器电气零点位置,找到后,把当前位置定义为原点。
寻原点方式在轴控的组态画面中完成。
例10:原点定义在5000000。
运动速度为200。
即,碰到原点开关后,停止的位置为5000000。
例11:寻原点方式为:反方向碰原点开关后,在电气零点停止。
此点为原点。
在运动过程中,参考点的设置:指令码 21在运动过程中,通过触发一个参考点事件来定义参考点的指令如下:例:执行条件:•增量编码器•重校功能无效状态•运动指令码为60停止运动: 指令码 04这个指令功能是用来停止G01,G30和G11这些没有停止功能的运动的, 它相当于停止命令。
但与停止命令不同的是,当用G04停止一个运动时,并不清空缓冲器。
例如,10秒后,停止一个G01的运动。
SMOVE %CH 2.0 (1,91,01,100000,1500,16#0000)SMOVE %CH 2.0 (2,90,05, 0 ,10000,16#0000)SMOVE %CH 2.0 (3,90,04,0,0,16#0000)强制参考点:指令码 62这个指令用于强制一个参考点(此时电机不能运动,处于静止)。