三洋步进电机
步进电机驱动芯片选型指南
以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
玻璃切割装置测控系统设计

玻璃切割装置测控系统设计作者:陈强文翁惠辉通舒服舟来源:《科学与财富》2020年第03期摘要:伴随着现代社会飞速发展,人们对玻璃制品的需求也越来越大。
切割是玻璃加工中的第一个步骤,也是玻璃加工中最基础的步骤。
本文主要研究玻璃切割装置测控系统,该设计主要分为四个部分:主控系统设计、步进电机驱动控制器设计、通信设计。
CPU选STM32F103RTC6单片机,采用日本东芝三洋公司的LV8727芯片驱动两相步进电机,通信采用485总线实现上位机与电机驱动控制器之间的通信。
从整体来看,该系统结构简单,实用性强,开发成本低,对开发简易玻璃切割装置具有一定的意义。
关键词:玻璃切割装置;STM32;步进电机;485总线引言随着经济的快速发展,玻璃在诸如手机屏幕、液晶电视、建筑材料等各行各业得到广泛的应用,切割精度的要求也越来越高[1]。
从玻璃切割技术诞生到现在,切割技术在不断地进步,切割效率和切割精度也在不断提升,玻璃加工越来越方便,从而能满足各行各业对玻璃的大量需求[2]。
目前,数控玻璃切割机在整个玻璃加工行业拥有绝对优势[3],应用十分广泛,数控玻璃切割机的未来发展朝着具有高速加工能力、加工精度越来越高发展。
本文选用STM32芯片和LV8727驱动芯片配合两相电机,设计一套玻璃切割机数控系统对玻璃切割机数控系统的若干关键技术进行研究,从而提高玻璃切割效率,降低生产成本[4]。
1.玻璃切割装置玻璃切割数控系统是玻璃切割生产线的主要功能执行部分,由刀具切割横梁、横向走刀机构、纵向走刀机构组成,横跨在切割台面上的是切割横梁,上面安装有切割刀具,横梁可以沿着台面两侧的光杆来回运动(X向),同时安装在横梁上的切割刀具可以沿着横梁的方向运动(垂直于X轴,Y向),另外刀具还可以进行上下运动(Z轴)。
控制器通过控制X轴,Y轴电机的运动进而控制刀头的位置以及切割的路径;再控制Z轴电机来控制切割压力[5]。
在X、Y、Z轴两端分别装有一个限位开关,防止电机运动到端点而继续运转而出现故障。
三洋伺服电机P系列样本

3.5
4.5
2,000
1,500
2,000 16.7
2,000 21.6
21.6
32.4
45.6
69.6
17.5
18.4
22.1
23.2
45.5
52.7
1.23
符号
PR NR Nmax TR TS TP IR IS IP KT KEф Rф QR te tm JM JM
32.6 32.4
0.37 (1.4)
-4
3.4X 10 5.0
44.7
WE
TB
VB
IB
JB W
150A
5.8
7.5
6.8
P10B13150BXS 《 130 》 1.5
7.4 8.8 19.6 6.9 7.9 17.9 1.34 47.0 0.84 15.0 5.3 4.9 35.08X 10-4 35.1X 10-4
20 to 90%(无结露)
适用的驱动器型号
V10
驱动器电源
Munsell N1.5 or equ驱i动器v使a用l温e度n,t湿度,温度
(circumference)
电源容量
永久磁铁
驱动器重量
法兰安装
N ote 1. 为标准驱动器,温度达到饱和状态时的值
2. 为绕组温度为20OC的值
12 7.5 6.3 73.08X 10-4 73.1X 10-4
23.1
90(24)
温度:0-4oC0 湿度:90%以下(应无结露)
50A
100A
200 to 230V AC+10%-15% 50/60Hz+-3Hz 3-phase 0-5oC5 湿度:90%以下(无结露)
LMG 公司简介1

LMG(埃姆玑)系韩国LMG株式会社之关系企业,累积多年的机械传动经验与高质量的制造技术,生产专业高精度伺服马达专用行星减速机来满足客户产业提升的需要,高精密行星式减速机该行星式减速机具有高精度、高刚性、高负载、高效率、低惯性、低振动、低噪音、低背隙、高转矩、等特点,机座号可以从40-400 速比可以从1.5:1-10000:1 扭矩可以达到20000N/M. 不仅可适配于安川、松下、三菱、富士、东元、台达、三洋、西门子、法那克、科比、科尔摩根、帕克等任意厂商的伺服电机或步进电机,同时量产高效、高质量的行星减速机以符合客户的竞争优势。
我们愿意最严谨的态度制造最精密的行星减速机,服务广大客户。
产品广泛应用于:航天航空工业、舰船、通讯设备、数控机床、切割焊接设备、纺织印染机械、印刷机械、包装机械、工程机械、冶金机械、机械手臂、机器人、医疗器械、半导体设备、精密测量仪器、食口机械等领域......。
42步进电机常见问题及解答

步电机系统解决方案42步进电机是行业最常用的步进电机尺寸,通常是性价比最高的步进电机选项,推荐优先选用42步进电机。
在42步进电机选用过程中,经常有一些朋友会有各种各样的疑问,我们整理了常见的关于42步进电机的疑问,希望对于您的工作有帮助。
Q.42步进电机是什么意思?A .42步进电机是指混合式步进电机的法兰外框尺寸是□42*42mm ,永磁式步进电机的机身直径是42mm 。
混合式步进电机为常见品种,见下面左图,永磁式步进电机多用于打印走纸等用途,见下面右图。
我们以下重点介绍常用的混合式42步进电机。
Q .42步进电机的速度跑多快?A.这得看您的负载有多大,步进电机推荐速度工作速度范围一般是90~900rpm ,但并不是说高速不能够跑,而是高速时候的扭矩太小了,实用性不大,另外,驱动电压越高,高速力矩衰减越慢,但42步进电机的驱动电压一般是DC24V 。
下面的距频图可以看到一些42步进电机在什么速度情况下可以带多大负载,X 轴是不细分时候的脉冲频率,脉冲频率*0.3=转速rpm ,可以看到42步进电机在9000pps,也就是2700rpm 也是可以跑的,就是力矩比较小了。
Q.42步进电机的功率多大?A.步进电机选型不是根据功率来选型,而是根据转速和扭矩来选型,虽然功率就是转速*扭矩,但同样功率的电机在高速可以带动一种负载,而不一定能够带动同样功率的低速负载,但为了给出一个大概功率概念,我们根据上图的距频图计算一下SST43D2125信浓步进电机在600rpm,也就是不细分驱动时候的功率是15.7W左右。
Q.42步进电机的尺寸多大?42步进电机扭矩多大?A.42步进电机法兰尺寸是□42*42mm,标准轴径5mm,出轴长短可以根据客户需要定制,但最常见的出轴长度是24mm和20mm,42步进电机带同步轮的时候一般常用24mm轴长的。
42步进电机的机身长一般是31~60mm,保持力矩大概0.2~0.7Nm,另外信浓薄款42步进电机机身厚度22.4mm,三洋薄款42步进电机机身厚度11.6和18.6mm,但薄款单价会贵一些。
60步进电机常见疑问及解答干货分享

60步进电机的产销量虽然不是很大,但也是常用型号之一。
在60步进电机选用过程中,经常有一些朋友会有各种各样的疑问,我们整理了常见的关于60步进电机的疑问,希望对于您的工作有帮助。
Q.60步进电机是什么意思?A.60步进电机是指混合式步进电机的法兰外框尺寸是□60mm,习惯称为60步进电机。
Q.60步进电机的外形尺寸有哪些要点?A.60步进电机法兰外框尺寸60mm,安装法兰的孔间距常见两种尺寸:50和47.14mm,后者和57步进电机的孔间距是通用的。
电机轴径有6.35/8/10mm等,但最常用轴径是8mm。
机身长度根据每家生产厂家的模具不同而有差异,通常60步进电机机身长在45~88mm之间。
出线方式外资品牌的插头式为主,国产品牌的引线式居多。
以下是信浓60标准步进电机的外观尺寸图。
Q.60步进电机扭矩多大?A.60步进电机的保持力矩根据机身长短不同而不同,通常机身长的保持力矩更大,另外双极驱动式步进电机比同样机身长的单极驱动步进电机保持力矩大。
60步进电机保持力矩一般在3.3Nm以下,有些厂家会生产加长机身的,但太长的电机很难跑上速度。
工作力矩可以参考步进电机的距频图。
Q.60步进电机单价多少?A.60步进电机的单价和批量大小、机身长短、质量要求水平、生产厂家的不同而有较大不同,一般是几十元到二百多元,而东方、三洋步进电机等外资品牌单价可能超过400元,日本信浓在中国有生产基地,单价比一般国产步进电机略贵,性价比比较高。
Q.60步进电机的驱动电压多少?A.60步进电机很少用定电压驱动的,通常是定电流驱动。
定电流驱动的时候,需要根据运行速度的高低选择合适的驱动电压,一般60步进电机驱动电压在DC24~48V之间,也有用更高直流电压或者交流驱动器来驱动的,驱动电压越高,高速的扭矩衰减越少。
具体多大机身长、多快速度需要多大电压,在参考步进电机距频图的基础上,还需要通过实验验证确定适合的参数。
以下是同一款信浓60步进电机在不同驱动电压下的距频图,可以看到驱动电压在不同速度下对于步进电机输出力矩的影响,在500pps也就是150rpm的时候,三种驱动电压的输出力矩没有变化,但在5000pps也就是1500rpm的时候,48V电压下的输出力矩超过24V的一倍以上。
三洋步进电机型号含义详解(大全)
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。
步进电机的特点1、一般步进电机的精度为步进角的3-5%,且不累积。
2、步进电机外表允许的最高温度。
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
3、步进电机的力矩会随转速的升高而下降。
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。
在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
4、步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。
1、反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
2、永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
3、混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
三洋R1 R2系列的参数列表和接线图
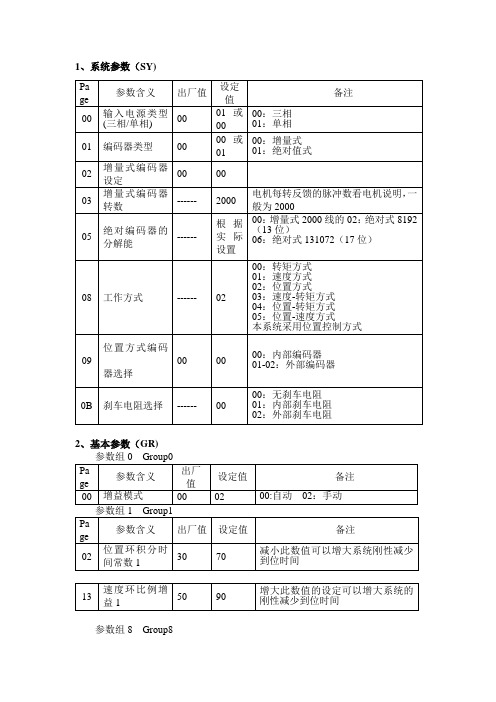
1、系统参数(SY)2、基本参数(GR)参数组8 Group8(二)RS2系列的参数Gr 0.00 设为02 (手动增益模式)Gr 1.02 设为60 (KP1位置环增益值调整)Gr 1.12 设为80 (KVP1速度环增益值调整)Gr 1.13 设为20 (TVI1速度环积分时间常数值调整)Gr 1.14 设为100 (JRAT1负载惯量百分比值调整)Gr 8.00 设为00 (CMDPOL电机旋转方向调整,07为反方向)Gr 8.10 设为00(正反转脉冲),02为脉冲+方向(PMOD位置指令方式选择)Gr 8.12 设为00-07 (位置指令脉冲数字滤波器调整,R电机请设为07)Gr 8.13 设为电子齿轮的分子Gr 8.14设为电子齿轮的分母Gr 8.29设为速度控制模式下电压/转速设定,一般设为200rpm / VGr 9.00 设为0C(正传超程屏蔽)Gr 9.01 设为0A(反传超程屏蔽)Gr 9.05 设为01(SON内部使能)Gr C.04 设为2000/32768(电机转一圈驱动器反馈给上位电脑2000脉冲)Gr C.05 设为驱动器反馈编码器的A和Z相信号的极性Gr C.06 设为00(32768);01(8192)(电机转一圈驱动器可以反馈给上位电脑的脉冲数)Gr C.08 设为01(针对R系列电机)SY01 设为00为3相200V,01为单相200V。
SY02 设为00为不接电阻,01为内置电阻,02为外接电阻。
SY04 设为00(PA_S_2.5M)。
SY05 设为06(131072脉冲)。
SY06 设为00(绝对值编码器)。
SY09 设为01为速度控制模式,02为位置控制模式SY0A 设为00(标准)。
注意:根据电机编码器的类型等实际情况设置参数,以免报警二、操作三、伺服的电源、信号线、UVW、编码器的接线增量式编码器的接线图注意:增量式编码器的24V正负接错的话会出现黑屏,而绝对式编码器24V接反的话会烧坏编码器,所以接线时绝对要注意正负不要接反。
伺服电机与步进电机的性能比较

伺服电机与步进电机的性能比较内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。
在目前国内的数字控制系统中,步进电机的应用十分广泛。
随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。
为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。
虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。
现就二者的使用性能作一比较。
一、控制精度不同两相混合式步进电机步距角一般为1.8°、0.9°,五相混合式步进电机步距角一般为0.72 °、0.36°。
也有一些高性能的步进电机通过细分后步距角更小。
如三洋公司(SANYO DENKI)生产的二相混合式步进电机其步距角可通过拨码开关设置为1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。
交流伺服电机的控制精度由电机轴后端的旋转编码器保证。
以三洋全数字式交流伺服电机为例,对于带标准2000线编码器的电机而言,由于驱动器内部采用了四倍频技术,其脉冲当量为360°/8000=0.045°。
对于带17位编码器的电机而言,驱动器每接收131072个脉冲电机转一圈,即其脉冲当量为360°/131072=0.0027466°,是步距角为1.8°的步进电机的脉冲当量的1/655。
一文解析三相步进电机与两相步进电机得差距在哪里
一文解析三相步进电机与两相步进电机得差距在哪里
众所周知,步进电机主要是依相数来做分类的,通常我们常见的有四相、二相、三相等几类。
所以本文小编主要介绍三相步进电机与两相步进电机得差距在哪里,首先介绍的是它们之间的区别,其次阐述了三相步进电机与两相步进电机步距角之间的差距,具体的跟随小编来详细了解一下。
三相步进电机与两相步进电机的区别1、电机的相数
是指电机内部的线圈数不同,两相步进电机电机内部是由2个线圈组成,而三相步进电机内部是由3个线圈。
2、电机的步距角
是指电机每走一步的角度,一般市面上二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°。
3、电机的尺寸
三相的电机一般是大电机,所以尺寸方面一般会比两相的电机大,这也决定了三相步进电机比两相的运行起来平稳性更好。
4、力矩
二相的电机的力矩相同尺寸会比三相的力矩稍微大些。
5、精度
两相步进电机驱动器的细分功能越来越强大,两相的同样可以达到三相所能达到的精度。
三相步进电机的高速性能好(特性较硬),要比两相步进电机的步距角小,精度更好。
由于扭力随速度升高下降得较慢,所以通常用于精度要求高的场合。
三相步进电机与两相步进电机步距角详解1、决定步距角的因素
步进电机分辨率(一圈的步数,360°除以步距角)越高,位置精度越高。
为了得到高分辨率,设计的极数要多。
PM型转子为N与S极在转子的铁心外表面上交互等节距放置,转子极数为N极与S极数之和,为简化讲解,假设极对数为1。
此处确定转子为永久磁铁。
国产车与进口绣花机的比较

并不是所有的国产车都不能做精细的活国产车能不能做细包针也就是说平包针的宽度在1.5MM以下,关键的问题在于机器的机械,电控等能不能控制出精确的程度.说白了就是电控能不能模拟出步进电机所需的精确控制信号,也就是所谓的动框角度.终合市场的机器我估计有以下配置,大豪95,1型2型电控,五相十拍的步进电机驱动器,四轮小车式轨道,五相十拍的驱动器根本达不到咱国产笨重的绣框所产生的动框针迹精度,再加上有些机器的年久失修,甚至有些四轮小车的轴承已有损坏,国产绣框的大而沉重,国产皮带的韧性太大,等因素,所以才会有断线 ,夹线,塞面料等现象,对于国产车做细活我有以下几点看法 1.没有三相细分的驱动器,三相细分的步进电机建议你别做太精密的活,以前老富怡的五相驱动器加上小日本的老三洋步进电机也可以,效果也相当好,(不相信的客户可以试试)2.机器的弹簧必须用0.8#以上的,这样才能使机器强劲而有力,针进出面料时,快速回弹,机针最好选用进口9号针。
3,皮带必须调紧,这样一来机器的框才更精确,但不能太紧,以手按下去,稍微有点软为最佳,不可按不动,4.绣花的面料,下面必须垫纸衬,就算是用花架也必须垫纸,垫的多少视面料的情况而定。
5.底面线调节必须适中,面料固定必须牢固,哪怕是多浪费点胶也值,这样就可以避免机器的夹线,塞面料,等现象。
特别提示:准备用国产机绣精细花样的客户在定机器的时候。
最好选择框架窄小的,(比如912机型)建议275/330(头距)*600的在此说一下进口机器与国产机器的主要区别,望各位同行指正:1: 先从框架的材质谈起,百灵达机器上的框架看上去很窄,但它不易变形.在同等条件下,国产的就容易弯曲.我曾经搞过田岛的,就是拿钢锯起锯,那铝合金很有韧性.我比较下来,百灵达比田岛的还要好.2: 从传动部分看,进口机器用的一般都是橡胶带,很少采用聚酯带,那老式的T10 除外.橡胶带比较柔软易弯曲,适用在直径比较小的同步带轮上,现在新型的进口机器.带轮较之以前明显小了.从而保证了同步带的节距与实际的半径误差控制在很小的范围内,而且在使用中不会出现拉长或者变形的情况(除非人为因素).在最大程度上保证了刺绣的精度.国产机器在使用一段时间后包针的粗细就与新的时候不同,就是皮带质量不过关.一般用5M型号.带宽看机器的尺寸.3: 装在皮带上的滚轮与框架之间的配合,进口的明显比国产的好.这要牵涉到零件加工精度与装配精度.4: 导轨只是一个导向作用,现在国产的也采用直线导轨.比以往的V型导轨有了飞跃.最新的田岛用了滚珠丝杠传动.滚珠丝杠是用在机床上的,我觉得有点奢侈了.毕竟绣花的精度是0.1MM.一般机床的精度可以达到 0.001MM.随着科技的发展,说不定会采用直线电机,那就减少了传动的环节.使力矩不损失.就像现在的缝纫机上用的电机直接驱动.5: 电机的精度与方式不同, 新型的进口机器用的伺服电机.而国产的一般还用混合式步进电机.只是在驱动上用了细分的技术.伺服电机是有反馈装置的.相当于装了一个轴角编码器,6; 电控装置的不同. 百灵达机器的挑线与收线机构是有专利的,他的电控要适应他的机械机构.他的包针看上去是均匀饱满.有光泽.就是他他迷也比田岛的好看,在他的参数里可以调节.不同的参数可以有不同的刺绣效果.特别是移框曲线,另外编码器,的分度是1200.更精细.7: 机械的精度: 请你们在下死点时,摇动针干,你会感觉到有明显的晃动,而进口的比较小,这是加工的精度达不到.针扎下去的时候,总有点偏的,在小针脚比较多的情况下,就是在原阵眼里工作.就容易产生毛线或者断线,如果是厚料的话,还会断针.而名牌的产品一般都是细而密.短针迹就多了.所以不好做.。
西门子伺服电机
SIEMENS伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。
所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。
目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。
交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。
当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
SIEMENS伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。
因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
2、运行范围较广 3、无自转现象正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。
当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)交流伺服电动机的输出功率一般是0.1-100W。
直流电机VS交流电机VS步进电机VS伺服电机
什么是直流电机,什么是交流电机,什么是步进电机,什么是伺服电机?1、什么是直流电机?答:输出或输入为直流电能的旋转电机,称为直流电机2、什么是交流电机答:输出或输入为交流电能的旋转电机,称为交流电机。
3、什么是步进电机答:步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)。
永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。
这种步进电机的应用最为广泛。
4、什么是伺服电机答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降,一般直流电机与直流伺服电机的区别直流伺服电机是永磁转子的,是用直流脉冲电压信号驱动;给它加一个恒定电压,只能转动一个很小的角度,要在它的几相定子线圈中,按一定的顺序加上直流脉冲,才能按要求转动一定的角度,与一般直流电机是完全不同的。
补充一下:驱动伺服电机的过程是相当复杂的;当然了,现在我们有电脑,有单片机,多么复杂的事情也变得轻而易举了直流伺服电动机工作原理是什么?伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降,伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
86步进电机常见疑问及解答干货分享
86步进电机的产销量虽然不是很大,但也是常用型号之一。
在86步进电机选用过程中,经常有一些朋友会有各种各样的疑问,我们整理了常见的关于86步进电机的疑问,希望对于您的工作有帮助。
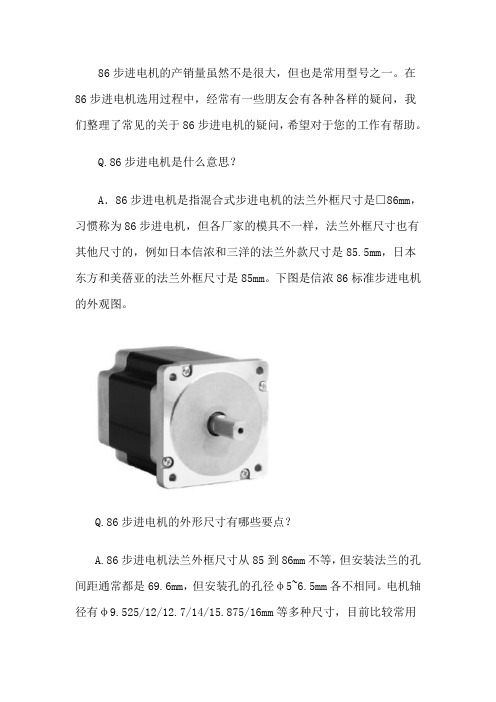
Q.86步进电机是什么意思?A.86步进电机是指混合式步进电机的法兰外框尺寸是□86mm,习惯称为86步进电机,但各厂家的模具不一样,法兰外框尺寸也有其他尺寸的,例如日本信浓和三洋的法兰外款尺寸是85.5mm,日本东方和美蓓亚的法兰外框尺寸是85mm。
下图是信浓86标准步进电机的外观图。
Q.86步进电机的外形尺寸有哪些要点?A.86步进电机法兰外框尺寸从85到86mm不等,但安装法兰的孔间距通常都是69.6mm,但安装孔的孔径φ5~6.5mm各不相同。
电机轴径有φ9.525/12/12.7/14/15.875/16mm等多种尺寸,目前比较常用轴径是12.7和14mm,轴的形状有D平台和键槽的,差异很大,要注意事先确认好。
机身长度根据每家生产厂家的模具不一样而有差异,通常86步进电机机身长在62~156mm之间。
出线方式主要是引线式,因为86电机电流大,插头式的打火的风险高。
以下是信浓86标准步进电机的外观尺寸图。
Q.86步进电机扭矩多大?A.86步进电机的保持力矩根据机身长短不同而不同,通常机身长的保持力矩更大,另外双极驱动式步进电机比同样机身长的单极驱动步进电机保持力矩大。
86步进电机保持力矩一般在12Nm以下。
工作力矩可以参考步进电机的距频图。
Q.86步进电机单价多少?A.57步进电机的单价和批量大小、机身长短、质量要求水平、生产厂家的不同而有较大不同,一般是一百多元到一千多元不等,东方、三洋步进电机等外资品牌单价都很贵,日本信浓在中国有生产基地,性价比比较高一些。
Q.86步进电机的驱动电压多少?A.86步进电机很少用定电压驱动的,通常是定电流驱动。
定电流驱动的时候,需要根据运行速度的高低选择合适的驱动电压,一般86步进电机驱动电压在DC48V以上,也有220V交流驱动器来驱动的,除非工作速度很低才用DC24V驱动,驱动电压越高,高速的扭矩衰减越少,机身越长也需要更高的电压才能够发挥电机的潜力。
一文解析三相步进电机与两相步进电机得差距在哪里
一文解析三相步进电机与两相步进电机得差距在哪里众所周知,步进电机主要是依相数来做分类的,通常我们常见的有四相、二相、三相等几类。
所以本文小编主要介绍三相步进电机与两相步进电机得差距在哪里,首先介绍的是它们之间的区别,其次阐述了三相步进电机与两相步进电机步距角之间的差距,具体的跟随小编来详细了解一下。
三相步进电机与两相步进电机的区别1、电机的相数是指电机内部的线圈数不同,两相步进电机电机内部是由2个线圈组成,而三相步进电机内部是由3个线圈。
2、电机的步距角是指电机每走一步的角度,一般市面上二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°。
3、电机的尺寸三相的电机一般是大电机,所以尺寸方面一般会比两相的电机大,这也决定了三相步进电机比两相的运行起来平稳性更好。
4、力矩二相的电机的力矩相同尺寸会比三相的力矩稍微大些。
5、精度两相步进电机驱动器的细分功能越来越强大,两相的同样可以达到三相所能达到的精度。
三相步进电机的高速性能好(特性较硬),要比两相步进电机的步距角小,精度更好。
由于扭力随速度升高下降得较慢,所以通常用于精度要求高的场合。
三相步进电机与两相步进电机步距角详解1、决定步距角的因素步进电机分辨率(一圈的步数,360°除以步距角)越高,位置精度越高。
为了得到高分辨率,设计的极数要多。
PM型转子为N与S极在转子的铁心外表面上交互等节距放置,转子极数为N极与S极数之和,为简化讲解,假设极对数为1。
此处确定转子为永久磁铁的步进电机的步距角θs由下式表示,其中Nr为转子极对数,P为定子相数,(本课后面叙述的HB型步进电机Nr为转子齿数):上式的物理含义如下:转子旋转一周的机械角度为360。
,如用极数2Nr去除,相当于一个极所占的机械角度即180°/Nr。
这就是说,一个极的机械角度用定子相数去分割就得到步距角,此概念如下图所示。
三洋伺服电机RS1快速入门手册

冲。通常将该参数的分子设定为13107,分母设定乘以10即为马 达转一圈的脉冲数。
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第8组参数(图例) 。
SMC Pneumatics (H.K.) Ltd.
二.选择伺服马达型号。
SMC Pneumatics (H.K.) Ltd.
二.选择伺服马达型号。
2.把选择好的型号保存到伺服驱动器里面。
1. 点击该处。
三.设置系统参数。
SMC Pneumatics (H.K.) Ltd.
1.选择伺服马达主电源电压。 page 00:00:表示三相200V电压,01:表示单相200V电压。
2.选择编码器类型。 page 01:00表示增量式的编码器,01表示绝对式的编码器。
3.选择控制方式。一般选择:02。 page 08:00:转矩控制模式,03:速度控制-转矩控制切换 01:速度控制模式,04:位置控制-转矩控制切换 02:位置控制模式,05:位置控制-速度控制切换
4.再生电阻选择。一般选择:00。 page 0b:00:没有连接再生电阻,01:使用内置再生电阻, 02:使用外部再生电阻。
3.Page05:伺服ON功能。改变该值可以选择是否需要伺服ON信号。 说明:02:当通用输入CONT1为ON时启动该功能。 03:当通用输入CONT1为OFF时启动该功能
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第9组参数(图例)。
SMC Pneumatics (H.K.) Ltd.
说明:当该设定值越大,马达定位的时间越长。对于负载较重, 反应速度不是太快的时候,可适当地增大该值,以满足要求。 4.Page15:JPAT1 负载惯量比1。
步进电机选型简表-sanyodenki

SANYO DENKI 日本山洋电机:驱动器
编码
驱动器型号
外观
电源
外部连接
A PMM-BD-4504 印刷电路板,光偶输入
DC 24V/36V+/-10% 1.5A
插针
B PMM-BD-4502 印刷电路板,光偶输入
PMM-MD-23120-10 印刷电路板,8 种微步,最大 180 等分 DC24/36V 2A 低振动, 低噪音,光偶输入
编码
驱动器型号
外观
电源
外部连接
J PMM-BD-5701 经济型 印刷电路板
DC 24V/36V+/-10% 2.5A
插针
K PMM-BD-5702 标准型 印刷电路板,光偶输入 DC 24V/36V+/-10% 2.5A
惯性矩
0.03 0.058 0.14 0.1 0.21 0.36 1.45
2.9
4.4
14.6 22
驱动器
A BCF A BCF A BCFH DS A BCFH DS A BCFH DS A BCFH DS D E H I D E H I D E H I E I E I
-2-
103H8223-0941(0911) 2 单极
103H8223-5041(5011)
双极
103H8223-5241(5211)
103H89222-0941(0911)
单极
103H89222-5241(5211) 2 双极
103H89223-0941(0911)
单极
103H89223-5241(5211) 2 双极
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
+0.5 4-ø4.5 0.5
+0.5 4-ø4.5 0.5
8 or less
0.013 ø6.35-0.013
ø38.1±0.025
0.000 ø6.35-0.013
ø38.1±0.025
74
2-phase stepping motor
Pulse Rate - Torque Characteristics
103H7124-0440
10
1.0
8 0.8
Torque (kgf-cm) Torque (N-m)
6 0.6 4 0.4
Getaway torque at JL1
Unipolar winding
Model
Holding torque at Rated Wiring
Wiring
2-phase energization current resistance inductance
One shaft 103H7121-0140 103H7121-0440 103H7121-0740 103H7123-0140 103H7123-0440 103H7123-0740 103H7124-0140 103H7124-0440 103H7124-0740 103H7126-0140 103H7126-0440 103H7126-0740
15.5±1
Lead wire UL1430 AWG22 41.8±0.8 20.6±0.5
5 1.5
56±0.5 4-47.14±0.13
26 or less
103H7123-0140/0440/0740/5040 (Single shaft) 103H7123-0110/0410/0710/5010 (Double shaft)
Number of rotations (min-1)
Sanyo constant current circuit
Source voltage: DC24V Wiring current: 1A/phase, 2-phase energization (full-step)
JL1=0.94x10-4kg·m2 (Uses rubber coupling)
2 0.2
Start torque
at Jቤተ መጻሕፍቲ ባይዱ2
0
0
0.1
1
10
100
Pulse rate (kpulse/s)
100
1000 2000 3000 5000
Number of rotations (min-1)
Sanyo constant current circuit
Source voltage: DC24V Wiring current: 2A/phase, 2-phase energization (full-step)
0.000 ø6.35-0.013
ø38.1±0.025
0.000 ø6.35-0.013
+0.5 4-ø4.5 0.0
103H7124-0140/0440/0740 (Single shaft) 103H7124-0110/0410/0710 (Double shaft)
+0.5 4-ø4.5 0.5
2 0.2
Start torque
at JL2
0
0
0.1
1
10
100
Pulse rate (kpulse/s)
100
1000 2000 3000 5000
Number of rotations (min-1)
Sanyo constant current circuit
Source voltage: DC24V Wiring current: 1A/phase, 2-phase energization (full-step)
A/phase Ω/phase 2 0.65 2 0.8 2 1.05
mH/phase 1.9 3.8 4.5
Rotor inertia Weigh
x10-4kg·m2 0.1 0.21 0.36
kg 0.47 0.65 0.98
73
8 or less
Dimensions (Unit: mm)
103H7121-0140/0440/0740/5040 (Single shaft) 103H7121-0110/0410/0710/5010 (Double shaft)
A/phase Ω/phase 1 4.8 2 1.25 3 0.6 1 6.7 2 1.6 3 0.77 17 2 1.7 3 0.74 1 8.6 22 3 0.9
mH/phase 8 1.9 0.8
15 3.8 1.58
12.5 3.1 1.4
19 4.5 2.2
Rotor inertia Weigh
JL1=0.94x10-4kg·m2 (Uses rubber coupling)
JL2=0.8x10-4kg·m2 (Uses direct coupling)
103H7123-0740
10 1.0
8 0.8
Torque (kgf-cm) Torque (N-m)
6 0.6 4 0.4
Getaway torque at JL1
Source voltage: DC24V Wiring current: 1A/phase, 2-phase energization (full-step)
JL1=2.6x10-4kg·m2 (Uses rubber coupling)
JL2=2.6x10-4kg·m2 (Uses direct coupling)
2-phase stepping motor
2-phase Stepping Motor
56 103H712 mm sq. 1.8˚/step
For information on the applicable driver, contact our sales department.
Specifications
JL1=0.94x10-4kg·m2 (Uses rubber coupling)
JL2=0.8x10-4kg·m2 (Uses direct coupling)
103H7123-0140
10 1.0
8 0.8
Torque (kgf-cm) Torque (N-m)
6 0.6 4 0.4
Getaway torque at JL1
103H7126-0140/0440/0740/5040 (Single shaft) 103H7126-0110/0410/0710/5010 (Double shaft)
15.5±1
Lead wire UL1430 AWG22 63.8±0.8 20.6±0.5 5 1.5
56±0.5 4-47.14±0.13
6 0.6
4 0.4
Getaway torque at JL1
2 0.2
Start torque
0
0
at JL2
0.1
1
10
100
Pulse rate (kpulse/s)
100
1000 2000 3000 5000
Number of rotations (min-1)
Sanyo constant current circuit
JL2=0.8x10-4kg·m2 (Uses direct coupling)
103H7121-0440
5 0.5
4 0.4
Torque (kgf-cm) Torque (N-m)
3 0.3 2 0.2
Getaway torque at JL1
1 0.1
Start torque at JL2
0
0
0.1
Two shafts -0110 -0410 -0710 -0110 -0410 -0710 -0110 -0410 -0710 -0110 -0410 -0710
N.m or more 0.39 0.39 0.39 0.83 0.83 0.78 0.98 0.98 0.98 1.27 1.27 1.27
JL1=0.94x10-4kg·m2 (Uses rubber coupling)
JL2=0.8x10-4kg·m2 (Uses direct coupling)
103H7121-0740
5 0.5
4 0.4
Torque (kgf-cm) Torque (N-m)
3 0.3 2 0.2
Getaway torque at JL1
26 or less
15.5±1
Lead wire UL1430 AWG22 75.8±0.8 20.6±0.5 5 1.5
56±0.5 4-47.14±0.13
26 or less
305 or more
305 or more
8 or less
0.013 ø6.35-0.013
0.000 ø6.35-0.013
Wiring
2-phase energization current resistance inductance
One shaft 103H7121-5040 103H7123-5040 103H7126-5040
Two shafts -5010 -5010 -5010
N.m or more 0.39 0.83 1.27
1
10
100
Pulse rate (kpulse/s)
100
1000 2000 3000 5000
Number of rotations (min-1)