编码器1
编码器种类
编码器种类
(一)高精度编码器
1绝对式轴角编码器型号—E1032-14
2绝对式轴角编码器型号—E3032-14
3绝对式轴角编码器型号—E1035-14
4绝对式轴角编码器型号—E1050-14
5绝对式轴角编码器型号—E1065-14
6绝对式轴角编码器型号—E1065-16
7绝对式轴角编码器型号—E3080A(1:16) 8绝对式轴角编码器型号—E3080A(1:16) 9绝对式轴角编码器型号—E1130K-16
10绝对式轴角编码器型号—E1130K-14
11绝对式轴角编码器型号—E1210-21
12绝对式轴角编码器型号—E1300-22
13增量式编码器型号—E2120
14增量式编码器型号—E2180
(二)普通编码器
1普通编码器—— PIE系列
2普通编码器—— PIE3系列
3普通编码器—— PIF系列
4普通编码器—— PID系列
5普通编码器—— PIB系列
6普通编码器—— PIG系列
7普通编码器—— PKT170系列
8普通编码器—— PKT130系列
9普通编码器—— PKT120系列
10普通编码器—— PKT100系列
11普通编码器—— PKT75系列
12普通编码器—— PKT50系列
13普通编码器—— PAL系列。
编码器基础知识

编码器基础知识
编码器是计算机科学中的一个重要概念,它涉及到将数据从一种格式转换为另一种格式的过程。
编码器的主要作用是将原始数据转换为计算机可以理解和处理的二进制形式,以便进行存储、传输和处理。
编码器的基本原理是将原始数据按照一定的规则进行转换,这个规则通常是预先定义的。
编码器可以将字符、数字、图像、音频等数据转换为二进制形式,以便计算机可以识别和处理。
编码器的种类有很多,包括ASCII编码、Unicode编码、Base64编码等。
其中,ASCII编码是最常用的编码方式之一,它将字符转换为计算机可以识别的二进制形式。
Unicode编码则是一种国际化的编码方式,它可以表示世界上几乎所有的字符。
Base64编码则是一种用于将二进制数据转换为ASCII字符串的编码方式,它常用于在文本中传输二进制数据。
除了基本的编码方式外,还有一些高级的编码技术,如哈夫曼编码、LZ77等。
这些技术可以进一步提高数据的压缩率和传输效率。
在计算机科学中,编码器是一个非常重要的概念,它涉及到数据的存储、传输和处理。
了解编码器的基本原理和种类,可以帮助我们更好地理解和应用计算机科学中的相关技术。
编码器使用说明书

编码器使用说明书编码器使用说明书1:介绍编码器是一种用于将模拟信号转换为数字信号的设备。
它主要用于将模拟信号转换为数字数据,以便在数字系统中进行处理和分析。
本使用说明书将介绍如何正确使用编码器以及其各项功能和操作步骤。
2:规格和功能2.1 编码器规格在本章节中,将详细介绍编码器的规格参数,包括输入和输出接口、分辨率、采样率等。
2.2 编码器功能本章节将详细阐述编码器的各项功能和特性,包括信号转换、数字化处理、数据存储等。
3:安装和连接3.1 安装编码器本节将介绍如何正确安装编码器设备,包括固定设备、连接电源、连接信号源等。
3.2 连接设备在本章节中,将说明如何正确连接编码器与其他设备,包括输入/输出设备、电脑等。
4:设置和配置4.1 编码器设置本节将详细阐述编码器的各项设置选项,包括输入信号设置、输出格式设置、参数调整等。
4.2 编码器配置在本章节中,将介绍如何进行编码器的配置,包括网络配置、设备通信配置、用户权限配置等。
5:操作和使用5.1 编码器启动与停止本节将详细介绍如何正确启动和停止编码器设备,包括开机、关机、系统重启等操作。
5.2 编码器操作指南在本章节中,将介绍如何进行编码器的操作,包括信号采集、数据处理、参数调整等。
6:故障排除本节将一些常见的故障现象和解决方法,以帮助用户快速解决设备故障。
7:附件本文档涉及的附件包括编码器的技术手册、安装图纸、数据线接口图等,附件可以通过邮件等方式获取。
8:法律名词及注释8.1 法律名词:在本节中列出本文档中涉及的法律名词,并附带相应的注释和解释。
9:结束语感谢您阅读本编码器使用说明书,希望本文档能为您正确使用和操作编码器提供帮助。
如有任何疑问或意见,欢迎联系我们。
21.编码器译码器(1)

110 01000000
111 10000000
集成译码器实例:74HC138
附加 控制端
S S3S2S1
Yi ' (S mi ) ' S 1时,Yi ' mi '
低电平 输出
74HC138的功能表:
输
入
输
出
S1
S
' 2
S3'
A2
0XX
A1 A0 XX
Y7' Y6' Y5' Y4' Y3' Y2' Y1' Y0'
0 XXXX 0 1 1 1 0 1 1 1 0
0 XXX 0 1 1 1 1 1 0 0 1 0
0XX0 1 1 1 1 1 1 0 1 1 0
0X011 1111110 1 0
00111 1111111 1 0
附加输出信号的状态及含意
YS'
YE'X 状态
1 1 不工作
0 1 工作,但无输入
1 0 工作,且有输入
4.4 若干常用组合逻辑电路
4.4.1 编码器 4.4.2 译码器 4.4.3 数据选择器 4.4.4 加法器 4.4.5 数值比较器
二、优先编码器
• 特点:允许同时输入两个以上的编码信号,
•
但只对其中优先权最高的一个进行编码。
• 例:8线-3线优先编码器
•
(I7优先权最高
•
I0优先权最低)
实例: 74HC148
作业
1 0 1 0 1 11 0 1 1 1 1 1
1 0 1 1 0 10 1 1 1 1 1 1
1 0 1 1 1 01 1 1 1 1 1 1
编码器分类
编码器分类1、按信号的原理分:增量式编码器、肯定式编码器、混合式编码器1)增量式编码器直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90,从而可便利地推断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简洁,机械平均寿命可在几万小时以上,抗干扰力量强,牢靠性高,适合于长距离传输。
其缺点是无法输出轴转动的肯定位置信息。
2)肯定式编码器利用自然二进制或循环二进制(格雷码)方式进行光电转换的。
肯定式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,肯定编码器可有若干编码,依据读出码盘上的编码,检测肯定位置。
编码的设计可采纳二进制码、循环码、二进制补码等。
它的特点是:(1)可以直接读出角度坐标的肯定值;(2)没有累积误差;(3)电源切除后位置信息不会丢失。
但是辨别率是由二进制的位数来打算的,也就是说精度取决于位数,目前有10位、14位等多种。
3)混合式肯定值编码器它输出两组信息:一组信息用于检测磁极位置,带有肯定信息功能;另一组则完全同增量式编码器的输出信息。
肯定值编码器是一种直接编码和直接测量的检测装置。
它能指示肯定值位置,没有累积误差,电源切除后,位置信息不丢失。
常用的编码器有编码盘和编码尺,统称为码盘。
从编码器的使用记数来分类,有二进制编码、二进制循环码(葛莱码)、二-十进制码等编码器。
从结构原理分类,有接触式、光电式和电磁式等几种。
混合式肯定值编码器就是把增量制码与肯定制码同做在一块码盘上。
在圆盘的最外圈是高密度的增量条纹,中间有四个码道组成肯定式的四位葛莱码,每1/4同心圆被葛莱码分割成16个等分段。
该码盘的工作原理是三极记数:粗、中、精计数。
码盘转的转数由对“一转脉冲”的计数表示。
在一转以内的角度位置有葛莱码的4*16不同的数值表示。
每1/4圆葛莱码的细分有最外圆的增量码完成。
增量式光电编码器:测速,测转动方向,测移动角度、距离(相对)。
编码器使用说明书

编码器使用说明书1. 引言1.1 目的1.2 范围2. 编码器概述2.1 定义和功能- 编码器是一种设备,用于将模拟信号转换为数字信号或者将数字信号转换为模拟信号。
- 主要功能包括:采样、量化、编码和解调等。
3. 硬件安装与连接3 .l 设备准备工作a) 检查硬件完整性,并确保所有配件齐全。
b) 查看用户手册以了解正确的物理连接方式。
3.l 连接步骤:a)确定电源适配器是否已插入并启动设备;b)通过USB线缆将编码器与计算机相连;c)根据需要进行其他外部设备(如传感器或执行机构)的连接;4.软件配置及操作指南4.l 驱动程序安装a ) 在Windows系统中打开“控制面板”,选择“添加/删除程序”选项;b ) 找到驱动程序光盘上提供的文件夹,然后运行其中一个可执行文件来开始自定义设置过程;c ) 根据向导提示完成驱动程序安装;5.参数设置方法5.l 启动软件a ) 双击桌面上的编码器图标以启动配置工具;b) 确保设备已正确连接并处于打开状态;5.2 参数设置a)选择要更改参数的通道;b)根据需要调整各个参数,如采样率、分辨率等;c)保存所做的更改,并确保将其应用到设备中。
6.故障排除6.l 常见问题及解决方法:- 编码器无法被识别:检查USB线缆是否插好;尝试重新安装驱动程序。
- 设备运行不稳定:确认电源适配器正常工作;检查硬件连接是否松脱。
7.附件本文档涉及以下附件:- 用户手册(PDF格式)- 驱动程序光盘8.法律名词及注释1. 模拟信号: 连续变化且可取任意值得信号。
例如声音和温度传感器输出。
2. 数字信号: 在离散时间点上表示信息或数据量的二进制形式。
例如计算机内部处理时使用数字信号进行操作。
编码器工作原理

编码器工作原理编码器是一种用来将输入信号转换成特定编码形式的设备,它在各种领域都有着广泛的应用,比如数字通信、控制系统、计算机等。
编码器的工作原理是通过将输入信号进行编码,然后输出特定的编码信号,以便于传输、存储或者处理。
在这篇文档中,我们将深入探讨编码器的工作原理及其应用。
首先,我们来了解一下编码器的基本结构。
编码器通常由输入端、编码电路和输出端组成。
输入端接收来自外部的信号,比如声音、图像、运动等,然后将这些信号传输给编码电路。
编码电路会根据特定的编码规则,将输入信号转换成对应的编码形式,最后输出给输出端。
接下来,让我们详细了解一下编码器的工作原理。
编码器的工作原理主要包括信号采样、量化和编码三个步骤。
首先是信号采样。
信号采样是指将连续的模拟信号转换成离散的数字信号的过程。
在这一步中,编码器会以一定的时间间隔对输入信号进行采样,获取一系列离散的信号样本。
接着是量化。
量化是指将采样得到的模拟信号样本转换成数字信号的过程。
在这一步中,编码器会根据一定的量化规则,将连续的模拟信号样本转换成离散的数字信号值。
最后是编码。
编码是指将量化得到的数字信号转换成特定编码形式的过程。
在这一步中,编码器会根据特定的编码规则,将量化得到的数字信号转换成对应的编码形式,比如二进制、格雷码等。
除了以上的基本工作原理,编码器还有许多不同的类型和应用。
常见的编码器类型包括数字编码器、模拟编码器、旋转编码器等。
每种类型的编码器都有着不同的工作原理和适用范围,比如数字编码器适用于数字信号的编码和传输,而模拟编码器适用于模拟信号的编码和处理。
在实际应用中,编码器有着广泛的用途。
比如在数字通信系统中,编码器可以将声音、图像等模拟信号转换成数字信号,以便于传输和处理;在控制系统中,编码器可以将机械运动转换成数字信号,以便于监控和控制;在计算机系统中,编码器可以将各种数据转换成特定的编码形式,以便于存储和处理。
总的来说,编码器是一种非常重要的设备,它通过将输入信号进行采样、量化和编码,将其转换成特定的编码形式,以便于传输、存储或者处理。
编码器工作原理

编码器工作原理引言概述:编码器是一种用于将运动转换为数字信号的设备,常用于测量旋转角度或线性位移。
它在许多领域中都有广泛的应用,如机械制造、自动化控制、机器人技术等。
本文将介绍编码器的工作原理及其应用。
一、编码器的类型1.1 光学编码器:利用光学传感器来检测运动物体的位置,常见的有绝对光学编码器和增量光学编码器。
1.2 磁性编码器:利用磁性传感器来检测运动物体的位置,常见的有绝对磁性编码器和增量磁性编码器。
1.3 其他类型:还有许多其他类型的编码器,如电容编码器、霍尔编码器等。
二、编码器的工作原理2.1 光学编码器工作原理:光学编码器通过光栅盘和光电传感器来实现位置的检测,光栅盘上的光栅条通过光电传感器产生信号,经过处理后得到位置信息。
2.2 磁性编码器工作原理:磁性编码器通过磁性条纹和磁性传感器来实现位置的检测,磁性条纹上的磁性信息被磁性传感器检测并转换为位置信息。
2.3 编码器信号处理:编码器输出的信号经过信号处理电路进行处理,包括滤波、放大、数字化等步骤,最终得到准确的位置信息。
三、编码器的应用领域3.1 机械制造:编码器常用于数控机床、机器人等设备中,用于准确测量位置和速度,实现精密加工。
3.2 自动化控制:编码器在自动化控制系统中起到重要作用,用于反馈位置信息,实现闭环控制。
3.3 机器人技术:编码器是机器人关节的重要组成部分,用于控制机器人的姿态和位置,实现精准运动。
四、编码器的优势4.1 高精度:编码器能够实现高精度的位置测量,满足各种应用领域的需求。
4.2 高稳定性:编码器具有良好的稳定性和可靠性,能够长时间稳定工作。
4.3 高速度:编码器能够快速响应运动信号,实现高速运动控制。
五、编码器的发展趋势5.1 高分辨率:随着技术的不断进步,编码器的分辨率将不断提高,实现更加精密的位置测量。
5.2 多功能性:未来的编码器将具有更多的功能,如温度补偿、自动校准等功能。
5.3 集成化:编码器将越来越趋向于集成化设计,减小体积、提高性能。
编码器作用

编码器作用编码器是一种用于将原始数据转化为另一种形式的设备或程序。
它主要作用是对输入的数据进行处理、编码或转换,从而便于后续的存储、传输或处理。
在计算机科学和通信领域,编码器起着重要的作用,以下是编码器的几个主要作用。
1. 数据格式转换:编码器能够将原始数据从一种格式转换为另一种格式。
例如,将图像从RGB格式转换为灰度格式,将音频从WAV格式转换为MP3格式等。
这种转换使得数据能够适应不同的应用需求和设备兼容性,提高了数据的可用性和灵活性。
2. 数据压缩:编码器能够对数据进行压缩,减少数据的存储和传输空间。
数据压缩可以通过减少冗余信息、采用高效的压缩算法等方式实现。
常见的压缩编码器有JPEG、MP3、H.264等,它们能够将图像、音频、视频等数据压缩至较小的文件大小,仍能保持较高的质量。
3. 错误检测和纠正:编码器能够在数据传输过程中检测和纠正可能出现的错误。
通过在编码过程中添加冗余信息、采用差错检测和纠错算法等方式,编码器能够有效地检测并纠正数据传输中的错误。
常见的错误检测和纠正编码器有循环冗余检验(CRC)、海明码等。
4. 数据加密:编码器能够对数据进行加密,保护数据的安全性和隐私性。
通过使用加密算法和密钥,编码器能够将原始数据转换为加密数据,在传输和存储过程中保护数据不被未授权的人员访问。
常见的加密编码器有RSA、AES等。
5. 数据修改和处理:编码器能够对原始数据进行修改和处理,实现对数据的特定功能需求。
例如,图像编码器能够对图像进行调整、滤波、旋转等操作,音频编码器能够对音频进行降噪、混音、均衡等处理。
这种编码器能够提高数据的质量和完整性,并满足特定的应用需求。
综上所述,编码器在数据处理、传输和存储方面起着重要的作用。
它能够对数据进行格式转换、压缩、错误检测和纠正、数据加密、数据修改和处理等操作,提高数据的可用性、安全性和效率。
编码器广泛应用于各个领域,如图像处理、音视频编码、通信协议、数据库存储等,对于现代科技的发展和应用起到了关键作用。
单片机中编码器的作用和功能
单片机中编码器的作用和功能
编码器是一种常见的数字信号处理器件,用于将输入的模拟或数字信号转换为相应的数字编码输出。
在单片机中,编码器主要有以下作用和功能:
1. 位置编码:编码器可以用于测量和确定物体的位置。
通过与转轴或位置相关的装置结合使用,可以测量物体的线性位置或旋转角度,并将其转换为数字编码输出,以便单片机进行处理和控制。
2. 增量式编码:编码器可以将物体的移动或旋转转换为增量的数字编码信号。
当物体移动时,编码器输出的编码信号将相应地增加或减少,单片机可以根据这些变化实时监测和控制物体的位置。
3. 速度测量:编码器还可以通过计算单位时间内编码信号的变化来测量物体的速度。
单片机可以通过识别编码器输出的脉冲信号的频率来计算物体的速度,并根据需要进行相应的控制。
4. 方向检测:编码器的输出信号还可以提供物体的行进方向信息。
通过检测编码器输出信号的变化模式,单片机可以判断物体是向前还是向后移动,并根据需要进行相应的方向控制。
总之,编码器在单片机中的作用和功能主要是将物理量转换为数字编码信号,以便单片机进行数字化处理和控制。
通过编码器,单片机可以对物体的位置、速度和方向进行实时监测和控制,实现精确的位置控制和运动控制。
巴姆尔绝对编码器SSI1说明书

S u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .AMG 71Features–Encoder multiturn / SSI –Optical sensing method–Resolution: singleturn 13 bit, multiturn 12 bit–Multiturn sensing with microGen technologie, without gear or battery–With additional incremental signals (SinCos 1 Vpp)Technical data - electrical ratings Voltage supply 7...30 VDC Consumption w/o load ≤100 mAInitializing time ≤200 ms after power on Interface SSI FunctionMultiturn Steps per revolution 8192 / 13 bitNumber of revolutions 4096 / 12 bit,65536 / 16 bit (option)Additional outputs SinCos Bandwidth200 kHz (-3 dB)Difference of SinCos amplitude ≤20 mV DC offset ≤20 mV Sensing method Optical CodeGray Code sequence CW InputsSSI clockIncremental output 2048 pulses (SinCos)Interference immunity EN 61000-6-2Emitted interference EN 61000-6-3Diagnostic functionsLED failure Self-diagnosisCode continuity check ApprovalsCE, UL approval / E256710AMG 71Technical data - mechanical design Size (flange)ø60 mmShaft type ø6 mm solid shaft FlangeSynchro flange Protection DIN EN 60529IP 66Operating speed ≤5000 rpm (mechanical)Operating torque typ.2 Ncm Rotor moment of inertia 25 gcm²Admitted shaft load ≤50 N axial ≤120 N radialMaterialsHousing: aluminium alloy Shaft: stainless steel Operating temperature -20...+85 °CResistanceIEC 60068-2-6Vibration 10 g, 10-2000 Hz IEC 60068-2-27 Shock 100 g, 6 msExplosion protectionII 3 G Ex nA IIC T4 Gc X (gas) II 3 D Ex tc IIIC T85°C Dc X (dust)Weight approx.350 g Connection Terminal coverOptional –Multiturn 16 bitS u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .AMG 71Part number AMG71 SS2048Additional outputS2048SinCos, 2048 pulses*Absolute share 1313 bit singleturn2513 bit singleturn + 12 bit multiturn 2913 bit singleturn + 16 bit multiturnInterface/interfacesS SSIAccessoriesConnectors and cables HEK 8Sensor cable for encoders Mounting accessoriesK 35Spring washer coupling for solid shaft ø6...12 mmDiagnostic accessories 11075858Analyzer for encoders HENQ 1100Data transferS u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .+UB Voltage supply (for the encoder) Ground (for the signals)A Cosinus A Cosinus inv.B Sinus B Sinus inv.C Clock C Clock D Data DDataTerminal significance Terminal assignment AMG 71S u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .AMG 71。
编码器基础知识(从零开始了解编码器)

编码器选型必须了解的五个参数
脉冲数(每转输出脉冲数 P / R);信号输出形式(信号路数及信号输出形式);电源电压(5~
12V 为低电压,12~24 为高电压);轴径(mm);外型尺寸(mm)。例:用户要求订购 100
脉冲、三路信号长线驱动器输出、电压 5V、轴径 6mm、外形尺寸 38mm 的,则我们编码器
编码器基础知识整理
weenjoy123
mzzh163@
都有明确说明。 实心轴编码器安装 如果编码器轴和设备轴之间采用刚性连接,在安装过程中两者之间有任何偏移,都会有很高 的负载作用在编码器轴上。为了避免产生超额的负载,在轴之间推荐采用柔性联轴器连接, 联轴器可以消除轴间偏移量,消除震动和轴向的位移。 空心轴编码器安装 在大部分情况下,编码器都直接与机器轴采用刚性连接,在这种 情况下编码器外壳不能和机器刚性连接,为保证编码器外壳不随 轴而旋转,采用弹性支架或定位销连接,这样既能固定编码器又 可以削减机器的震动。 机械安装保护措施 按CE设备制造要求,编码器安装完成后所有的旋转部件,比如: 轴,联轴器,测量轮和支架等都必须加以防护以防以外碰触。 ·
编码器的主要应用场合: 数控机床及机械附件 机器人、自动装配机、自动生产线。 电梯、纺织机械、缝制机械、包装机械(定长)、印刷机械(同步)、木工机械、塑料机械(定 数)、橡塑机械。 制图仪、测角仪、疗养器 雷达等。 应用场合 测速度用常用增量型编码器,可无限累加测量;测位置用绝对型编码器,位置唯一性(单圈 或多圈), 信号类型: 1、A/B/Z 型 2、RS422 差分 3、SSI(格雷码) 信号有正弦波的,有方波的。
编码器基础知识整理
weenjoy123
mzzh163@
编码器是通过把机械角度物理量的变化转变成电信号的一种装置;在传感器的分类中,他归 属于角位移传感器。 根据编码器的这一特性,编码器主要用于测量转动物体的角位移量,角速度,角加速度,通 过编码器把这些物理量转变成电信号输出给控制系统或仪表,控制系统或仪表根据这些量来 控制驱动装置。 基本原理 构造 编码器主要是由码盘(圆光栅、指示光栅)、机体、发光器件、感光器件等部件组成。 (1) 圆光栅是由涂膜在透明材料或刻画在金属材料上的成放射状的明暗相间的条纹组成的。 一个相邻条纹间距称为一个栅节,光栅整周栅节数就是编码器的脉冲数(分辨率)。 (2) 指示光栅是一片固定不动的,但窗口条纹刻线同圆光栅条纹刻线完全相同的光栅片。 (3)机体是装配圆光栅,指示光栅等部件的载体。 (4)发光器件一般是红外发光管。 (5)感光器件是高频光敏元件;一般有硅光电池和光敏三极管。 工作原理 由圆光栅和指示光栅组成一对扫描系统,在扫描系统的一侧投射一束红外光,在扫描系统的 另一侧的感光器件就可以收到扫描光信号;当圆光栅转动时,感光器件接收到的扫描光信号 会发生变化,感光器件可以把光信号转变成电信号并输出给控制系统或仪表。 一般编码器的输出信号为两列成 90 度相位差的 Sin 信号和 Cos 信号(这是由指示光栅的窗口 条纹刻线保证的);这些信号的周期等于圆光栅转过一个栅节(P)的移动时间,对 Sin 信号和 Cos 信号进行放大及整形就可输出方波脉冲信号。 编码器的应用场合十分的广泛,在此列举几个简单事例: (1)数控机床对加工工件自动检测就是通过编码器来进行检测的:数控机床刀架的对零校 准也是通过编码器来实施的。 (2)编码器在 PLC 上的应用:一般 PLC 上都有高速信号输入口,编码器可以作为高速信号 输入元件,使 PLC 更加迅速和精准地实施闭环控制。而在变频器上其一般接变频器的 PG 卡 上。 (3)编码器用在电梯上,用于测量电梯的升降速度和位置。 光电编码器分类 按测量方式分类:旋转编码器和直尺编码器 按编码方式分类:绝对式编码器,增量式编码器和混合式编码器 旋转式编码器分类 接触式编码器(机械原理) 光电式编码器(光电原理):增量式和绝对式编码器 电磁式编码器(磁力原理)
编码器的工作原理

编码器的工作原理
编码器是一种常见的电子设备,它在许多领域都有着重要的作用,比如数字通信、计算机系统、工业控制等。
那么,编码器的工作原理是什么呢?下面我们将从基本原理、工作过程和应用领域等方面进行介绍。
首先,我们来了解一下编码器的基本原理。
编码器是一种将机械位移或角度转换为数字信号的装置。
它可以将机械运动转换为数字信号输出,以便于计算机或控制系统进行处理。
编码器通常由测量部分和信号处理部分组成,测量部分用于测量机械位移或角度,信号处理部分则将测量到的信号转换为数字信号输出。
其次,我们来了解一下编码器的工作过程。
编码器的工作过程可以分为测量、信号处理和输出三个步骤。
首先,测量部分通过内部的传感器或光电器件来测量机械位移或角度,然后将测量到的信号传输给信号处理部分。
信号处理部分会将测量到的模拟信号转换为数字信号,并进行相应的处理,最终输出数字信号供计算机或控制系统使用。
接下来,我们来了解一下编码器的应用领域。
编码器在工业控制领域有着广泛的应用,比如在数控机床、机器人、自动化生产线等设备中常常使用编码器来测量机械位移或角度,以实现精确的位置控制。
此外,编码器还在数字通信、计算机系统等领域有着重要的应用,比如在通信设备中用于信号的编码和解码,以及在计算机系统中用于位置反馈和运动控制等方面。
总的来说,编码器是一种将机械位移或角度转换为数字信号的装置,它的工作原理包括测量、信号处理和输出三个步骤。
编码器在工业控制、数字通信、计算机系统等领域都有着重要的应用,可以实现位置控制、信号编解码等功能。
通过对编码器的工作原理进行深入了解,我们可以更好地应用和理解这一重要的电子设备。
编码器的工作原理及分类

编码器的工作原理及分类编码器是一种电子设备或电路,用于将模拟信号转换为数字信号。
编码器的工作原理是通过将连续的模拟信号转换为离散的数字信号,以便于传输、处理和存储。
编码器通常由两个主要组件组成:采样器和量化器。
采样器负责以一定的频率采样输入模拟信号,将其转换为离散的样本。
量化器则将采样后的样本进行量化,将其映射为一系列离散的数字值。
具体而言,编码器的工作原理如下:1.采样:编码器通过将输入模拟信号按照一定的频率进行采样,将其转换为一系列离散的样本。
采样频率决定了样本的数量和质量,通常采样频率越高,样本的精度越高,但也会增加系统的复杂性和数据的处理量。
2.量化:采样后的样本是连续变化的模拟信号,需要通过量化将其转换为离散的数字信号。
量化器将样本映射为一系列离散的数字值,通常使用一个固定的二进制或多进制编码方案,如二进制码、格雷码等。
量化过程中,样本与最接近的离散数值匹配,即将样本所属的区间表示为该离散数值。
3.编码:量化后的离散信号通过编码器进行编码,转换为数字信号。
编码器使用一种特定的编码方案,将离散信号映射为二进制码或其他数字表示形式,常见的编码方式有直接二进制编码(BCD)、格雷码、ASCII 码等。
编码后的数字信号可以直接传输、存储和处理。
编码器根据输入信号和编码方式的不同,可分为多种不同类型,常见的编码器类型有以下几种:1.广义编码器:广义编码器是最常见的编码器类型,可将任何类型的输入信号转换为数字信号,如模数转换器(ADC)和音频编码器等。
广义编码器可根据输入信号的特点选择合适的编码方式,用于不同应用领域。
2.旋转编码器:旋转编码器是一种用于测量旋转运动的编码器,通常用于输入设备如鼠标、旋钮等的位置检测。
旋转编码器通过检测旋钮的旋转位置和方向,将其转换为数字信号输出。
3.光学编码器:光学编码器是利用光学原理测量位置的编码器,常用于测量线性或旋转运动的位置。
光学编码器通过红外线或激光光束与光栅结构进行交互,将光栅的运动转换为数字信号输出。
av1 编码参数
av1 编码参数AV1编码器的参数包括但不限于:1. 帧并行度(frame-parallel):该参数决定了编码器如何并行处理帧。
例如,值为0可能表示帧是顺序处理的,而更高的值则表示更多的并行处理。
2. 瓦片列数(tile-columns):这个参数用于控制视频帧被分割成多少列瓦片来进行独立编码。
3. 自动替代参考帧(auto-alt-ref):这个参数控制是否以及何时使用替代参考帧。
4. CPU使用率(cpuused):这个参数允许用户指定编码过程中使用的CPU资源量。
5. 编码次数(passes):这个参数决定了视频帧被编码的次数。
多次编码可以改进视频质量,但也会增加编码时间和文件大小。
6. 线程数(threads):这个参数用于指定编码过程中使用的线程数量。
使用多线程可以加快编码速度,但也可能增加系统负担。
7. 关键帧最小和最大间距(kf-min-dist、kf-maxdist):这些参数控制关键帧之间的最小和最大间距。
关键帧是包含所有后续帧信息(例如运动矢量)的帧。
8. 延迟帧数(lag-in-frames):这个参数用于控制编码器在开始编码之前需要等待的帧数。
9. 目标使用情况(end-usage):这个参数用于指定编码输出将如何使用。
例如,它可以是流媒体、本地播放或存储等。
10. 恒定质量(cq-level):这个参数用于控制编码质量,值越高表示质量越好,文件大小也越大。
请注意,以上只是一些常见的AV1编码器参数,实际上还有许多其他参数可用,具体取决于所使用的具体软件或工具。
在设置这些参数时,建议根据您的具体需求和资源进行权衡,以获得最佳的编码效果和性能。
Baumer 绝对编码器多转并行1说明书

S u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .GXP1W with clamping flange Features–Encoder multiturn / parallel –Optical sensing method–Resolution: singleturn 12 bit, multiturn 12 bit –Clamping or synchro flange–Resolution, code and preset programmable –Encoder programming by Windows software –RS232 encoder programming interfaceTechnical data - electrical ratings Voltage supply 10...30 VDC Reverse polarity protection YesConsumption w/o load ≤50 mA (24 VDC)Initializing time typ.50 ms after power on Interface 24 parallel outputs FunctionMultiturn Steps per revolution ≤4096 / 12 bit Number of revolutions ≤4096 / 12 bit Absolute accuracy ±0.03 °Sensing method OpticalCodeGray, cut gray, BCD, binary programmableCode sequence CW/CCW coded andprogrammable by connection InputsTxD, RxD (RS232)Control signals UP/DOWN inv. and zero ENABLE inv. STORE inv.Output stages PNP or NPN open collector Interference immunity DIN EN 61000-6-2Emitted interference DIN EN 61000-6-4Programming interface RS232Programmable parametersSteps per revolution Number of revolutions Code2 presets (limits)Rotation speed monitoring Diagnostic functionsSelf-diagnosisCode continuity check Multiturn sensing ApprovalUL approval / E63076GXP1W - parallelTechnical data - mechanical design Size (flange)ø58 mmShaft typeø10 mm solid shaft (clamping flange)ø6 mm solid shaft (synchro flange)FlangeClamping or synchro flange Protection DIN EN 60529IP 54 (without shaft seal), IP 65 (with shaft seal)Operating speed≤10000 rpm (mechanical) ≤6000 rpm (electric)Starting torque ≤0.015 Nm (+25 °C, IP 54) ≤0.03 Nm (+25 °C, IP 65)Rotor moment of inertia 20 gcm²Admitted shaft load ≤20 N axial ≤40 N radial MaterialsHousing: steel Flange: aluminium Operating temperature -25...+70 °CRelative humidity 95 % non-condensing Resistance DIN EN 60068-2-6Vibration 10 g, 16-2000 Hz DIN EN 60068-2-27 Shock 200 g, 6 ms Weight approx.600 gConnection Cable 1 m, connector D-SUB, 37-pinS u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .GXP1W - parallelPart number GXP1W.C1Connection31Cable 1 m, axial, connectorD-SUB, 37-pin41Cable 1 m, radial, connectorD-SUB, 37-pinVoltage supply / signals1010...30 VDC / open collector NPN 2010...30 VDC / open collector PNPFlange / Solid shaft0Clamping flange / ø10 mm, IP 54 A Clamping flange / ø10 mm, IP 65 1Synchro flange / ø6 mm, IP 54BSynchro flange / ø6 mm, IP 65AccessoriesConnectors and cables10160874Female connector D-SUB, 37-pin (Z 140.001)Mounting accessories10117669Eccentric fixing, single (Z 119.006)10141255Adaptor plate for clamping flange formodification into synchro flange (Z 119.013)10117667Mounting adaptor for encoders with synchro flange (Z 119.015)10125051Mounting adaptor for encoders with clamping flange (M3) (Z 119.017)10158124Bearing flange for encoders with synchro flange (Z 119.035)10141132Spring washer coupling D1=6 / D2=10 (Z 121.C01)Programming accessories 10161019Programming cable for parallel shaftencoders, CD with ProGeber software and manual (Z 139.005)11034218CD with software ProGeber & manual (Z 150.008)Data transferS u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .Connector Core colour Assignment Pin 1 white Output D0Pin 2 brown Output D1Pin 3 green Output D2Pin 4 yellow Output D3Pin 5 grey Output D4Pin 6 pink Output D5Pin 7 black Output D6Pin 8 violet Output D7Pin 9 grey/pink Output D8Pin 10 red/blue Output D9Pin 11 white/greenOutput D10Pin 12 brown/green Output D11Pin 13 white/yellow Output D12Pin 14 yellow/brown Output D13Pin 15 white/grey Output D14Pin 16 grey/brown Output D15Pin 17 white/pink Output D16Pin 18 pink/brown Output D17Pin 19 white/black Output D18Pin 20 brown/black Output D19Pin 21 grey/green Output D20Pin 22 yellow/grey Output D21Pin 23 pink/green Output D22Pin 24 yellow/pink Output D23Pin 25 – –Pin 26 ––Pin 27 yellow/blue Zero settingPin 28 brown/blue ENABLE Pin 29 brown/red STORE Pin 30 green/blue UP/DOWN Pin 31 – –Pin 32 – –Pin 33 – –Pin 34 white/blue GND-Sense Pin 35 white/red UB-Sense Pin 36 red UB Pin 37blueGNDUB Encoder voltage supply.GND Encoder ground connection relating to UB. Outputs 24 parallel output signals.D0-D23 For PNP it is recommended to utilize pull- down resistors for every data line, for NPNpull-up resistors of 4.7 kΩ.Outputs Special outputsD19 - D23 With inferior resolutions these outputsmay be configurated as special outputs. Zero settingInput for setting a zero point anywhere within the programmed encoder resolution. The zero setting operation is triggered by a High impulse and has to be in line with the selected direction of rotation (UP/DOWN). Connect to GND after setting operation for maximum interference immunity. Impulse duration >100 ms. If there is an offset being entered by programming interface the offset will be activated by the zero input.UP/DOWNUP/DOWN counting direction input.This input is standard on High. UP/DOWN means ascending output data with clock- wise shaft rotation when looking at flange. UP/DOWN-Low means ascending values with counterclockwise shaft rotation when looking at flange.ENABLEInput for activating the output drivers that are triggered by input level Low. Uponbeing on High (or less potential) the output drivers switch to high-impedance (Tristate). STOREInput for output data storage. Upon a Low input level the encoder data are stored in the intermediate memory. Upon being on High (or less potential) the current encoder position data are switched to the output drivers. This line must be applied for reliable data readout in binary code.GND-SenseInternally connected to GND and serves together with UB-Sense for measuring the encoder voltage supply.UB-SenseInternally connected to UB. In case the sensor line is not utilized the connection must be isolated (danger of short circuit).Terminal significance Terminal assignment GXP1W - parallelS u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .DimensionsM4 x 7120°42 ±0.150h75870U N C 4 - 40D-SUB19751049 5.5ø 6f 633137510495.5ø 6f 6331620UNC 4 - 407017.516GXP1W - synchro flangeM3 x 7120°36f848 ±0.15870U N C 4 - 40D-SUB19751020159ø10h 633131020159ø10h 6337516UNC 4 - 40702017.516GXP1W - clamping flangeGXP1W - parallelControl inputs Input circuit Input level High >0.7 UB Input level Low <0.3 UB Input resistance10 kΩParallel outputs Output circuitOpen collector circuit-proof Output level High (PNP) >UB -4.5 V (I = -15 mA)Output level Low (NPN) <3.5 V (I = 15 mA)Load High (PNP) <-20 mA Load Low (NPN) <20 mA Tristate<200 µATrigger level Encoder Mating connector PC connector function M12, 5-pins D-SUB, 9-pins – Pin 1 –RxD Pin 2 Pin 3GND Pin 3 Pin 5TxDPin 5Pin 2Jumper 4-6 andJumper 7-8Connect encoder to voltage supply (UB/red/pin 36 and GND/blue/pin 37) using the supplementary 37-pin D-SUB connector.Terminal assignment programming cable。
光栅编码器1

光栅编码器介绍与应用1.光栅编码器介绍光栅编码器包括带有光栅的尺子和电子反馈器件;光栅尺的实际作用就是检测位置信息,高精度的光栅尺是精密机械精度的一个重要影响因素,各个品牌的光栅也在不断的更新技术,提高光栅的精度,性能;精密仪器、精密机械是以后发展的重要方向,光栅尺的应用也更加的广泛。
光栅编码器一般应用是将读数头和光栅尺安装在两个相对移动的工件上,他们每移动一个栅距,输出信号便变化一个周期,通过周期的变化,来测量出相对位移;现在市面上使用的光栅编码器输出信号一般有三种,一种是两路相差90°的方波信号,也称数字信号,一种是两路相差90°的正玄信号,也称模拟信号,还有一种是串行输出,直接输出位置信息。
光栅编码器的尺子一般为金属尺带和玻璃尺带两种,同分辨率的金属尺带的价格较玻璃尺带稍便宜一些,性能也略差;高精度的光栅编码器的尺子多为玻璃尺带,玻璃尺的热敏系数等一些参数要优于金属尺子,不过玻璃尺的行程一般较短,金属尺在这方面就有较大的优势,金属尺的行程可以很长,可以有一定的弯折,安装也比较方便。
光栅编码器的主要参数有:分辨率、精度、重复性、带宽等。
在我们选择光栅的时候,首先要考虑它的精分辨率,要求的最小分辨率是多少,其次是精度,是否能满足系统的要求,还有就是输出频率;其他的还有一些安装要求,环境要求,维护等。
选择合适的光栅,不仅可以让设备满足设计要求,还能节约成本,提升设备的整体性能。
说了那么多,其实大家最关心的还是光栅编码器的精度,没有精度的编码器就好比走不准的手表,除了装饰毫无用处;影响精度的因素有很多,下面简单介绍一下;大家都知道,光栅编码器是通过读取尺子上的光栅来获得位置信息的,那是不是把尺子的栅距刻得越小越好呢?当然不是,不同的光栅编码器它的光电扫描原理不同,刻画的栅距也各不相同,通过电子细分做成不同分辨率的光栅编码器。
分辨率一般通过对光学传感器产生的周期信号进行电信号插值或数字插值产生。
光电编码器介绍 1光电编码器原理 光电编码器,是一种通过光电转换将

光电编码器介绍1.光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90旱牧铰仿龀逍藕拧根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90海佣煞奖愕嘏卸铣鲂较颍鳽相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1.2绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必须有N条码道。
目前国内已有16位的绝对编码器产品。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。
绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
编码器图解
编码器图解(1)1、认识编码器(编码器在机器人控制中的应用)2、编码器的测量对象3、编码器测量直线位移的方式(1)编码器装在丝杠末端通过测量滚珠丝杠的角位移,间接获得工作台的直线位移x,构成位置半闭环伺服系统。
(2)丝杠螺距设:螺距t=4mm,丝杠在4s时间里转动了10圈,求:丝杠的平均转速n(r/min)及螺母移动了多少毫米?螺母移动的平均速度v又为多少?(3)编码器和伺服电动机同轴安装(4)编码器和伺服电动机同轴安装(5)编码器和伺服电动机同轴安装(6)编码器两种安装方式比较编码器装在丝杠末端与前端(和伺服电动机同轴)在位置控制精度上有什么区别?4、绝对式测量(ABS)(1)信号性质输出n位二进制编码,每一个编码对应唯一的角度。
(2)接触式绝对码盘(3)绝对式光电码盘5 增量式测量(INC)(1)信号性质(2)增量式光电编码器的结构(3)辨向光敏元件所产生的信号A、B彼此相差 90°相位,用于辨向。
当码盘正转时,A信号超前B信号0°;当码盘反转时,B信号超前A信号90°。
(4)辨向信号(5)倍频(细分)在现有编码器的条件下,通过细分技术能提高编码器的分辨力。
细分前,编码器的分辨力只有一个分辨角的大小。
采用4细分技术后,计数脉冲的频率提高了4倍,相当于将原编码器的分辨力提高了3倍,测量分辨角是原来的1/4,提高了测量精度。
(6)零标志(一转脉冲)在码盘里圈,还有一条狭缝C,每转能产生一个脉冲,该脉冲信号又称“一转信号”或零标志脉冲,作为测量的起始基准。
(7)零标志在回参考点中的作用(8)回参考点减速开关(9)回参考点示意图6、编码器在数字测速中的应用(1)模拟测速和数字测速的比较有一增量式光电编码器,其参数为1024p/r,在5s时间内测得65536个脉冲,则转速(r/min)为:n = 60 × 65536 /(1024 × 5)=768 r/min编码器每转产生N 个脉冲,在T 时间段内有 m1 个脉冲产生,则转速(r/min)为:n = 60m1 /(NT)有一增量式光电编码器,其参数为1024p/r,测得两个相邻脉冲之间的脉冲数为3000,时钟频率fc 为1MHz ,则转速(r/min)为:n = 60fc /(Nm2 )=60×106/(1024×3000)=19.53 r/min编码器每转产生N 个脉冲,用已知频率fc作为时钟,填充到编码器输出的两个相邻脉冲之间的脉冲数为m2,则转速(r/min)为:n = 60fc / (Nm2)7、编码器在主轴控制中的应用阅读使人充实,会谈使人敏捷,写作使人精确。
8-3线编码器1
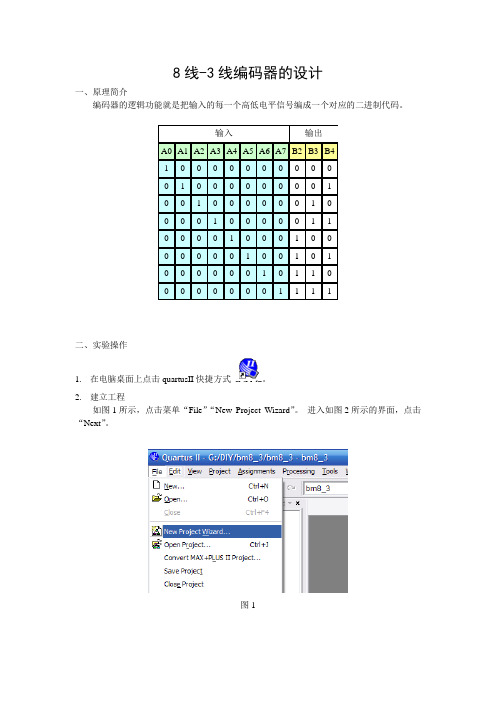
port( a:in std_logic_vector(7 downto 0);
b:out std_logic_vector(2 downto 0));
End bm8_3;
Architecture one of bm8_3 is
begin
process(a)
begin
case a is
when"01000000"=>b<="110";
when others=>b<="111";
end case;
end process ;
end one;
图7
图8
4.编译文件
在项目导航栏“Project Negatior”中选择文件,点击鼠标右键,选“Set as Top-Level Entity”。
如图9所示,点击编译按钮 。图10为编译成功提示。
图9
图10
5.引脚设置
点击菜单 的 ,如图22所示。
图22
进入如图23所示界面,在 栏中设置引脚,如图23所示。
图23
引脚设置如下:
a[7]PIN_7
a[6]PIN_8
a[5]PIN_9
a[4]PIN_10
a[3]PIN_11
a[2]PIN_12
a[1]PIN_13
0
1
0
1
1
0
0
0
0
0
0
0
0
1
1
1
1
二、实验操作
1.在电脑桌面上点击quartusII快捷方式 。
2.建立工程
如图1所示,点击菜单“File”“New Project Wizard”。进入如图2所示的界面,点击“Next”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单圈绝对值编码器
PROFIBUS 系列的旋转编码器是基于当今快速单圈取样技术,绝对值编码器符合 PROFIBUS 编码器的行规,行规号3.062,操作时支持 Class 1 和 Class 2 。
当操作时基于 Class 1 位置数据和诊断数据字节1 ... 16可用,另外代码的方向可以选择为 CW 顺时针增加或 CCW 反时针增加。
如果编码器操作时根据 Class 2 那些在 Class 1 基础上的附加的功能就可用,这些包括每圈分辨率的缩放比例和总分辨圈,同样包括预置功能。
另外扩展的诊断报告也支持,除此之外编码器提供扩展功能,诸如速度传输、扩展缩放比例功能、可编程极限开关和调试模式。
可拆卸的连接后盖内装有滑动开关用于设定终端电阻和旋转开关用于设定地扯,指定编码器固定的地址和终端电阻就靠这些开关。
这种编码器设计为轴安装并且可选择为同步法兰和夹紧法兰。
PVS 58
PROFIBUS 接口位单圈工业标准外壳Ø58mm 速度传输
扩展缩放比列功能可编程极限开关调试模式
同步法兰或夹紧法兰
外形尺寸
电气连接
端子解释
电源的接地连接
数据线 B (pair 1), Bus In数据线 A (pair 1), Bus In
数据线 B (pair 2), Bus Out数据线 A (pair 2), Bus Out
端子的安排见操作部件节。
(左)(右)(右)(左)
同步法兰
夹紧法兰
电缆密封套 PG 9, 径向
8深
电缆密封套 PG 9, 径向
6 深6 深
单圈绝对值编码器
PVS 58
技术参数
一般特性
系列
电气特性
工作电压
线性度
输出码
代码顺序(计数方向)接口
分辨率
单圈
总分辨率
接口类型
传输速率
符合标准
连接
端子部分
符合标准
防护等级
环境测试
辐射干扰
抗干扰
抗冲击
抗震动
环境条件
工作温度
贮存温度
机械特性
材料
外壳
法兰
轴
毛重
旋转速度
瞬时惯量
起动转矩
轴负载
轴向
径向PVS 58
10 ... 30 V DC
±0,5 LSB
二进制码
可参数化
CW 增加(顺时针旋转,代码增加)
CW 减少(顺时针旋转,代码减少)
13 Bit
13 Bit
PROFIBUS
0,0096 ... 12 MBit/s
PNO profile 3.062, RS 485
可拆卸外壳盖
DIN EN 60529, IP65
DIN EN 60068-2-3, 无凝路
DIN EN 50081-1
DIN EN 61000-6-2
DIN EN 60068-2-27, 30 g, 11 ms
DIN EN 60068-2-29, 10 g, 16 ms
DIN EN 60068-2-6, 10 g, 10 ... 1000 Hz-20 ... 70 oC (253 ... 343 K)
-40 ... 85 oC (233 ... 358 K)
铝,铝粉层
铝,3.1645
不锈钢,1.4305
约 500 g
最大6000 min -1
50 gcm2
≤5 Ncm
40N
110N
单圈绝对值编码器PVS 58
操作步骤
显示部件
调整站地址
站地址可用旋转开关调整,地址可以界定为 1 和 99 之间
调整终端电阻
终端电阻 RT (121Ω)可用开关切入电路
电源
接口
电源
终端线组地址开关
错误显示
状态显示
数据线 A数据线 B
数据线 A数据线 B
Last member
单圈绝对值编码器
PVS 58
数据传输原理
编码器参数表等级 P+F 2.1 和 P+F 2.2
组套软件
编程器
PROFIBUS 标准参数旋转方向功能调试诊断缩放比例保留保留
激活制造商指定参数(Octet 26)保留
介定测量步(参考:Octet 26,Bit 0 and 1)总分辨率保留
介定测量步参考激活调试模式减少诊断保留
激活低软件极限开关激活高软件极限开关激活参数 Octet 27低极限开关高极限开关物理测量步保留
旋转编码器类型保留保留
选择速度传输单位保留保留
PLC 等
循环数据交换
编码器
字节号
参数
位号
单圈绝对值编码器
PVS 58
更多信息,详见“附件”章节
数据格式
轴型式工作原理外壳材料法兰 / 轴尺寸
连接类型
AG 可拆卸外壳,内有端子盒
电缆出口R 径向
可选
0 无可选输出码
单转位数13 8192
B 二进制码温度
N 无扩展011 轴 Φ10 mm x 20 mm 夹紧法兰032 轴 Φ6 mm x 10 mm 同步法兰
N 铝粉涂层
V 实心轴S 单圈P PROFIBUS
塑料
波纹橡胶滚花铝盘滚花塑料盘塑料
波纹橡胶滚花铝盘滚花塑料盘
安装支架安装支架
安装罩壳和组件偏心夹紧
可用类型
附件连轴器
测量轮,周长 500 mm
测量轮,周长 200 mm
安装附件
安装附件
连轴器
附件
订货型号代码
单圈绝对值编码器
PVS 58。