A320-自动飞行系统
【空客A320培训PPT课件】自动飞行概述

MENU 系统概述
6/25
MCDU 1
Flight Control Unit
MCDU 2
导航信息 性能信息 ADIRS & GPS 时钟
无线电导航
自动飞行
FMGCs
FMGC 向 下 列 系 统 提 供 输 出 信息:
自动驾驶系统——用于俯仰 ,横滚和偏航控制
自动推力系统——用于推力 控制
EFIS(电子飞行仪表装置
MENU 系统概述
3/25
A320系列飞机自动飞行系统的计算和处理 功能由两台飞行管理制导计算机(FMGC)完 成。
这两台计算机是相同的,在正常情况下一起 工作。出于训练目的,我们将把这两部FMGC 作为一个整体集中讨论。
FMGC1 COMFPMUGTACTsIONFMGC2 &
PROCESSING
无线电导航信息。
FMGCs
MENU 系统概述
5/25
MCDU 1
Flight Control Unit INPUT DEVICES
MCDU 2
导航信息 性能信息 ADIRS & GPS 时钟
无线电导航
自动飞行
FMGCs
飞行员通过使用以下组件向FMGC输入 信息:
两个多功能控制和显示组件(MCDU) , 一个单一的飞行控制组件(FCU)。
AP2
FD2
MENU 系统概述
17/25
MCDU 1
Flight Control Unit
MCDU 2
FMGC1
FD1
AP1
自动飞行
FMGC2
AP2
FD2
MENU 系统概述
18/25
MCDU 1
A320系列飞机自动飞行系统故障诊断专家系统研究的开题报告

A320系列飞机自动飞行系统故障诊断专家系统研究的开题报告一、选题背景及研究意义自动飞行系统是现代化民用飞机中不可或缺的关键技术之一,它能够大幅度提升飞机的安全性和效率,减轻飞行员的负担。
但是自动飞行系统也容易出现故障,且故障种类繁多,故障诊断和处理面临很大的困难。
因此,开发一种快速准确的自动飞行系统故障诊断专家系统显得尤为重要。
A320系列飞机是一种广泛应用于商业航空运输的窄体中短程客机,其自动飞行系统较为复杂,包括自动驾驶、自动着陆、飞行管理系统等多个模块。
因此,研究A320系列飞机自动飞行系统故障诊断专家系统对提升其飞行安全性和经济效益有积极的影响。
二、研究目标本课题旨在研究A320系列飞机自动飞行系统故障诊断专家系统,主要目标包括:1. 构建A320自动飞行系统故障诊断专家系统,实现故障自动检测、诊断和推荐修复措施。
2. 根据实验数据和实际操作经验,分析A320系列飞机自动飞行系统的故障特征和规律,提高诊断准确性和效率。
3. 探索基于机器学习的A320系列飞机自动飞行系统故障诊断方法,提高诊断的智能化和自适应性。
三、研究方法本研究采用基于规则的专家系统和基于机器学习的方法相结合的方式进行故障诊断。
具体方法包括:1. 建立A320自动飞行系统故障规则库,通过规则匹配实现故障诊断和推荐修复措施。
2. 运用机器学习算法实现A320自动飞行系统故障分类和诊断,例如神经网络、决策树、支持向量机等。
3. 结合专家系统和机器学习方法,实现故障诊断结果的可靠性评估和自适应修正。
四、预期成果本研究预期成果主要包括:1. 构建A320系列飞机自动飞行系统故障诊断专家系统原型,可实现自动故障检测、诊断和推荐修复措施功能。
2. 研究A320系列飞机自动飞行系统故障的特征和规律,提高故障诊断的准确性和效率。
3. 探索机器学习算法在A320系列飞机自动飞行系统故障诊断方面的应用,并实现专家系统和机器学习算法的优化结合。
A320自动飞行系统-飞行管理(B)-MCDU

自动飞行
MENU 飞行管理 (B)
32/58
离港机场与目的地机场的横向修正页面上 的功能不同。我们把两个页面并排放在一起来 看一下。
自动飞行
MENU 飞行管理 (B)
33/58
你可以看到有些行选择功能相同,有些不同。目的地机场的横向修正页面提 供与该飞行阶段相关的功能,而离港机场的横向修正页面具有自己的相关阶段 的功能。我们现在来看一下如何选择或修改离港跑道。
自动飞行
MENU 飞行管理 (B)
37/58
每条跑道都有:
跑道代码, 跑道长度, 跑道航道以及 相应的制导系统(如果有的话)。
自动飞行
MENU 飞行管理 (B)
38/58
注意那个下一页符号 。它表示可用NEXT PAGE(下一页)键调出另一个页面。我们将 为你调出这一页面。
自动飞行
MENU 飞行管理 (B)
自动飞行
MENU 飞行管理 (B)
53/58
注意在输入了飞机重量和燃油重量后,飞行 计划页面上的所有短划线都被FMGC的预测值 代替了。
不对,单击PERF(性能)键。
自动飞行
MENU 飞行管理 (B)
54/58
当按下性能键时,当前飞行阶段的性能页 面将显示出来。注意要求飞行员输入速度的琥 珀色方框。我们将为你输入速度。
自动飞行
MENU 飞行管理 (B)
51/58
注意在输入了飞机重量和燃油重量后,飞行 计划页面上的所有短划线都被FMGC的预测值 代替了。
请调出性能页面。
自动飞行
MENU 飞行管理 (B)
52/58
注意在输入了飞机重量和燃油重量后,飞行 计划页面上的所有短划线都被FMGC的预测值 代替了。
A320机型 第22章自动飞行系统

22章重点1、FMGC、ELAC、惯导,哪个是AFS(自动飞行系统)的计算机?FMGC2、FCU(飞行控制组件)在遮光板上。
3、FMA(飞行方式指引)在PFD 顶部4、A320飞行系统核心计算机?FMGC5、自动飞行系统的FMGC(飞行管理指引计算机)装在电子舱MCDU(多功能控制显示组件)装在驾驶舱FCU装在驾驶舱遮光板上6、FMGC有2个FAC有2个FCU有1个,分为3部分FCU有两个通道7、自动飞行系统有2套自动推力有1套A/THR也有两个通道8、AP(自动驾驶)衔接电门在FCUA/THR(自动推力)衔接电门在FCU9、FE叫飞行包络保护,FEC叫飞行包络计算机,FE有2套10、FE的功能:风切变探测、alpha-floor包络保护11、包络保护功能在FAC12、自动飞行系统操纵时,飞机侧杆不动,油门杆也不动,但是脚蹬可能会动,因为脚蹬是钢索传动13、自动飞行系统的功能:自动操纵飞机各个舵面,自动完成推力的计算和改变,使飞机沿着预先设定的飞行计划飞行14、AFS(自动飞行系统)的故障探测隔离功能在:FIDS(故障隔离和探测系统)15、FMGC输出指令到AP,再由AP输出到ELAC,SEC和FAC,操纵各个舵面16、飞控计算机有ELAC(升降舵和副翼计算机)、FAC(飞机增稳计算机)、SEC(扰流板升降舵计算机)、FMGC(飞机管理指引计算机)17、AP推力载荷:在AP接通时,侧杆上会有推力载荷,即防止误操作,若施加一定的力,克服了负载会断开自动驾驶(同A/THR)18、自动推力输出推力给FADEC(全权限数字电子控制)19、自动推力切断方法:油门杆放入慢车位或者使用油门杆侧面的自动推力切断电门20、FMGC功能:(全选)21、FMGC功能分为FM和FG部分,FM主管飞行计划,FG主管飞行制导,FG的功能分为AP,FD,A/THR22、飞行计划的监控由FM(飞行管理)完成23、AP、FD、A/THR功能在FMGC实现24、着陆测试由FMGC完成,检查自动着陆的能力FMA上显示着陆能力的等级CAT 3 2 125、在进近过程中可以同时衔接2个AP,AP1为主,AP2热备份(同DIR)26、自动推力可以人工或自动脱开。
【空客A320培训PPT课件】自动飞行制导模式a

自动飞行
MENU 制导模式 (A)
3/54
在起飞前滑行时,注意在FMA上: CLB(爬升)方式以青蓝色显示表示待命;起飞阶段结束 后它将自动接通。
NAV(导航)方式以青蓝色显示表示待命;飞机离地后它 将自动接通。
1FD2表示两部飞行指引仪都接通(尽管由于在地面没有任 何方式接通,FD符号不显示)。
自动飞行
MENU 制导模式 (A)
6/54
PF:性能页面
FD的横向方式为RWY(跑道);FD垂直指令杆指令 偏航/横滚角度,它将使你在滑跑和初始爬升期间跟踪起 飞跑道航道信标。
如果在起飞时没有盲降系统可用,该区域显示空白。 注意:
1、在地面滑跑期间,FD垂直指令杆由偏航指令杆代 替,以便在低能见条件下帮助你滑跑。
在 FMA 上 , HDG( 航 向 ) 表 示 横 向导航现在由FCU航向选择器上所作 的选择控制。
自动飞行
MENU 制导模式 (A)
4/54
现在你将油门杆设置到灵活卡槽用于起飞。 FMA指示: MAN FLX 49(人工灵活49),表示现在完全是人工控制推 力并且灵活起飞推力已经设定。 自动推力系统待命,可以通过你在油门杆上的动作接通。
自动飞行
MENU 制导模式 (A)
5/54
FMA还指示: FD的垂直方式为SRS;FD水平指令杆指令一俯仰角 度,它将根据当时的条件,例如双发,单发……,使你 能以指定的基准速度V2飞行。SRS代表速度基准系统。
2/54
你计划飞行的SID(标准仪表离港)航路包括几个航路点上 的 一 些 高 度 限 制: 在 D086C上 为 +6 9 0英 尺 , 在 D164T上 为 FL60,在NERIN上为FL90。
A320系统知识普及帖之5-自动飞行系统之FMGC篇上

A320飞机的自动飞行系统相对比较简单,主要由4部计算机组成.2部FMGC,2部FAC.控制面板为MCDU和FCU我们通常把MCDU叫做长期控制界面,因为在飞行计划和性能参数输入后,不会有大的改动。
而把FCU称作短期控制界面。
在空中可以随时修正速度,航向,高度等信息。
在本文中我将对FMGC的功能进行简单介绍。
A320系列飞机的FMGC由HONEYWELL或THALES/SMITHS公司提供比如以THALES/SMITHS公司为例C13043AA04(CFM ENGINE)和C13043BA02(IAEENGING)两种型号,计算机价格昂贵,单价在20万刀以上。
两部FMGC的工作方式为主从模式,由飞行引导部分的接通状态来决定那部为主要,那部为从属计算机。
例如AP1接通,则FMGC1 为主要。
如果AP2接通则FMGC2为主。
完全按照AP,AP2,FD1,FD2,A/THR1,ATHR2的次序决定。
主要计算机来计算各种飞行参数,从属计算机也会计算相同的参数,如果计算结果一致则完全服从主计算机的指令。
由一部FMGC控制EFCS和FADEC。
两部计算机的工作方式有三种1. 正常模式(Normal mode)顾名思义就是说两部计算机都工作的状态。
由其中一部控制EFCS和FADEC2. 单一模式(Single Mode)指有一部FMGC故障的情况。
3. 独立模式(independent Mode)主FMGC计算各种数据控制系统,从FMGC接收同样的数据并计算但并不控制系统。
从FMGC的数据要和主FMGC数据比较。
如果出现较大的偏差就会出现独立工作模式比如速度超过2节,重量超过2吨等。
出现偏差后,从属FMGC会试图和主FMGC同步,如果同步不成功进入独立模式。
比较常见的情况是在更新完一部FMGC的数据库后,造成两部FMGC的数据库不同,会进入独立模式。
FMGC 内部有两个通道, COMMAND CHANNEL 和 MONITORING CHANNEL分别有自己独立的供电组件,使用不同的编程软件控制.FMGC内部分成两部分,飞行管理部分FM和飞行引导部分FG在FM内部加载了6个数据库1, FM operational software2, NAV Data Base根据AIRAC周期每28天更换一次,目前是周期是1206( 31MAY2012-28JUN.2012)安装两个数据库,当前的和前一个.3, AMI (FM airline config.)航空公司可以自己选择各种单位如KG,LBS…4, OPC (option configuration Disk)各种和自动驾驶系统有关的选装设备5, Performance Date Base6. VAR DATA BASE (Magnetic Variation Data Base)可以通过MDDU装载以上数据库,一共十几张盘,每张盘大约要12分钟以上. 在一部装完后可以通过交输功能给另一部交输软件整个过程大约3小时左右.FM的主要功能是飞机的位置计算,飞行计划,飞机速度计算等.FG的主要功能有AP. FD. A/THR具体功能将在下篇中介绍.。
A320驾驶舱设备以及各系统面板介绍

A320驾驶舱设备以及各系统面板介绍首先,我们来介绍一些基本的驾驶舱设备。
A320的驾驶舱由两个座椅组成,左边是机长座位,右边是副驾驶座位。
每个座位都配备了用于控制飞机的操纵杆和脚踏板。
操纵杆用于控制飞行的姿态,包括上升、下降和转弯。
脚踏板用于控制飞机的方向,也就是左右转向。
在驾驶舱的中央,有一个大型的玻璃仪表板,称为电子集成仪表系统(EFIS)。
该系统由数个显示屏组成,用于显示飞机的各种重要信息。
这些信息包括航向、高度、速度、姿态、油量等。
驾驶员可以通过这些屏幕获得必要的信息,以便正确地操作飞机。
在驾驶舱的中上部分,有一个叫做全彩式头顶显示器(HUD)的设备。
该设备可以将飞行数据投影到飞行员的视场上,使其可以同时看到飞行数据和外界景象,从而提高飞行员的注意力和反应速度。
接下来我们来介绍一些系统面板。
A320的驾驶舱面板包括了飞行控制面板(FCP)、主要飞行显示(PFD)、导航显示(ND)、机组通信面板(GCP)、自动飞行面板(AFP)、空调操作面板(ACOP)等多个面板。
飞行控制面板(FCP)位于操纵杆旁边,用于控制自动驾驶系统。
飞行员可以通过该面板设定飞行的高度、速度和航向,在达到设定值后,飞机会自动进行相应的调整。
主要飞行显示(PFD)位于驾驶员的前方,在EFIS仪表板上显示飞机的基本航行参数,包括航向、高度、速度等信息。
导航显示(ND)用于显示导航信息,例如飞机当前位置、航路以及地图等,以帮助驾驶员进行导航。
机组通信面板(GCP)用于控制驾驶员与空中交通管制和其他机组成员之间的通信。
自动飞行面板(AFP)用于控制自动驾驶系统的工作模式和参数。
空调操作面板(ACOP)用于调整飞机的空调系统,以确保驾驶舱和客舱的舒适度。
除了上述面板外,A320的驾驶舱还有一些其他的设备和面板,用于控制飞机的其他系统,例如燃油系统、油门控制、液压系统、襟翼和襟翼翻板等。
这些设备和面板的位置和功能都是根据空中客车的标准设计,以保证驾驶员能够方便地控制飞机的各个部分和系统。
A320自动飞行系统-飞行管理(A)-MCDU

自动飞行
MENU 飞行管理 (A)
46/70
不管航路点有几个,目的地信息总是显示在 飞行计划页面的底部。
自动飞行
MENU 飞行管理 (A)
47/70
让我们来看一下航路点 的颜色代码。
白色的是我们正飞向的 航路点,这里是D086C。 因此,它称为“飞向”航 路点。它是白色的,以便 与其它航路点区分开。
不对,单击行选键左1。
自动飞行
MENU 飞行管理 (A)
11/70
1 2 3 4 5 6
左
1 2 3 4 5 6
右
行选键从上到下分别编为1到6号。例如, 用来调用FMGC的行选键称为行选键左1。
不对,单击行选键左1。
自动飞行
MENU 飞行管理 (A)
12/70
你已经调出了FMGC状态页面。 在显示的几项信息中,你可以找到飞机机型以及所使 用的发动机型号。
自动飞行
MENU 飞行管理 (A)
51/70
让我们将ND改成计划方式。
请将ND的显示方式改成计划方式。
自动飞行
MENU 飞行管理 (A)
52/70
让我们将ND改成计划方式。 不对,单击ND方式选择器。
自动飞行
MENU 飞行管理 (A)
53/70
让我们将ND改成计划方式。 不对,单击ND方式选择器。
6个数据行,例如“IAE-V2500-AX” 以及在屏幕底部的一个草稿行。
你将在本模块中看到如何使用草稿行。
自动飞行
MENU 飞行管理 (A)
14/70
飞行管理,或FM,使用两个数据库进行计 算,一个是导航数据库,一个是性能数据库。
自动飞行
MENU 飞行管理 (A)
A320系统知识普及帖之7-自动飞行系统之FMGC篇中

先介绍一下简单的FG部分吧。
FG有以下三种功能AP,FD,A/THR其中AP有两部,AP1和AP2分别来自于FMGC1 和FMGC2在起飞后5秒可以接通任意一部自动驾驶,比如说接通把杆飞行员一侧的AP,从功能上没有任何区别。
从爬升到进近前只能接通一部自动驾驶,AP1或AP2。
接通另一部时前一部会自动跳开。
在距离跑道头大约25海里时,飞行员可以通过FCU上的APPR按钮(此按钮的功能是让计算机开始搜索航向道和下滑道信号)在激活,之后接通第二部AP两部AP都接通后,由于程序销钉的缘故AP1有优先权控制系统,AP2做备份。
如果不飞三类进近,在飞机到达决断高度后,断开自动驾驶,目视着陆。
如果飞三类进近,可以通过AP系统自动接地。
这个在国外繁忙机场比较常见。
国内还没有三类的机场。
如果只有一部AP接通,发生故障后可以人工尝试接通另一部。
如果两部自动驾驶都接通时,AP1故障时AP2会自动接通。
FD飞行指引功能同样有两部,FD1显示在机长一侧,FD2显示在F/O一侧。
有两种显示模式十字架(HDG-V/S)和小鸟模式(TRK-FPA)空客推荐起飞用十字架,着陆时用小鸟模式。
如果一部故障,剩下的FD会给两边同时提供指引。
A/THR自动推力虽然也有两部但只有一部工作。
由主FMGC同时控制两台发动机。
如果一部失效。
另一部不会自动接替工作,需要人工切换FMGC的主从模式后人工接通。
下面谈一下三种功能的接通和断开方式。
AP只能人工接通。
AP断开可以通过以下方式。
1. 侧杆上的优先权选择按钮断开。
这是唯一一种正常的断开方式。
2,。
大力推动锁定在中立位的侧杆。
3.。
用方向舵踏板断开AP(超过正常配平10度以上)4.用THS的配平轮断开AP以上常见的断开方式中只有第一种是正常断开方式。
AP OFF 红色信息显示在上ECAM 的MEMO区,Master Warning light和音响警告在9秒后自动消失。
其余的几种方式都会被系统认定为故障断开。
A320系统结构逻辑彩图-全
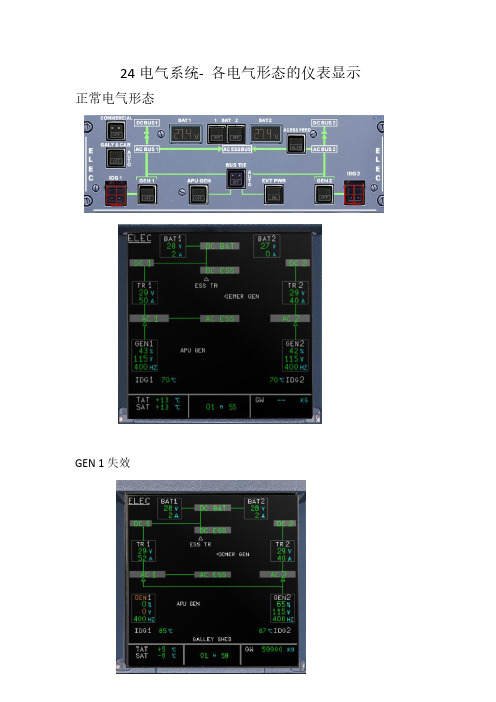
24电气系统- 各电气形态的仪表显示正常电气形态GEN 1失效TR1失效双TR失效紧急电气形态(紧急发电机供电)空中,紧急电气形态(仅电瓶供电)A320FMA 方式逻辑关系图正是基于此种逻辑关系,才将垂直方式放在中间,便于飞行员观察理解方式的改变影 响A320导航导航精度检查:【常用方法】:在PROG页面中的到某一点的方位/距离(BRG/DISTTO)区域输入某导航台的代码然后将计算的方位/距离同ND上的原始数据作比较。
导航精度要求:航路【误差≤3海里】终端区【误差≤1海里】1.飞机静止不动2.ADIRS方式选择旋钮设置到NAV位3.输入当前位置给IRS (MCDU INT A页面)IRS完全校准:无线电导航调谐:正常备用GPWSATC&TCASWXBUSSA320电气系统汇流条结构完整图IDG IDGA320紧急电气形态逻辑图IAS注意:在RAT 正伸出而应急发电机正耦合过程中,(约8 s) 电气网络仅由电瓶供电。
AC1+AC2 FAULT且IAS>100KT.RAT自动放出并驱动蓝液压系统。
一个液压马达驱动EMER GEN工作。
ACESS SHED和DE ESS SHED 两个汇流条恢复供电如果RAT失速或者飞机在地面,速度小于100KT。
EMER GEN不再供电。
电气网络仅有电瓶供电。
速度在50KT以下,AC ESS BUS被自动卸载,所有显示组件失去。
EMER GEN 正常工作:空中RAT最小速度140KT。
此信息会显示在EWD和STS页。
A320飞行操纵系统逻辑图A320飞行操纵521 12 23 34 4 53 3 3 3 1 1 11 22112L.AIL R.AILA320空调系统原理图BLEEDPACKCOND正常情况下由发动机引气系统给空调组件提供引气。
热引气经由组件流量控制活门输送到初级热交换器。
然后冷却的引气进入空气循环机的压缩机部分,被压缩达到更高的压力和温度,经由主热交换器再次冷却。
A320自动飞行系统FCU-飞行控制组件

自动飞行
MMEENNUU FCU
26/50
自动飞行
MENU FCU
27/50
航向-垂直速度/航迹-飞行航迹角(HDG-V/S/TRKFPA)按钮用来切换航向-垂直速度方式和航迹-飞行 航迹角方式。
FCU显示窗中的HDG-V/S或TRK-FPA字样明确地指示 出了当前的选择。
我们将改变速度。
MMEENNUU FCU
15/50
自动飞行
MENU FCU
16/50
自动飞行
MENU FCU
17/50
我们从速度/马赫,或SPD/MACH,控制区域 开始学习。它包括: 一个窗口, 一个速度/马赫按钮,和 一个速度/马赫选择旋钮。
自动飞行
MMEENNUU FCU
18/50
速度/马赫选择器控制着几个功能。这与FCU 上的所有选择器一样。
让我们进一步看一下。
自动飞行
MMEENNUU FCU
19/50
转动: 改变速度
你可以通过转动选择旋钮在窗口中设置一个 速度。选择的速度显示在窗口中。
自动飞行
MMEENNUU FCU
20/50
如果按入旋钮,你在窗口中看到的短划线意 味着速度将随着预先计划的性能剖面自动变化 。
自动飞行
MMEENNUU FCU
1/50
我们现在详细地看一下飞行控制组件(FCU )的功能和控制器,这就是本模块的主题。
自动飞行
MMEENNUU FCU
2/50
速度/马赫
自动飞行
MENU FCU
3/50
速度/马赫
横向
自动飞行
MENU FCU
A320模拟飞行教程

2.高度表拔正及修正海平面气压调定 STD 或QNH 的单位为百帕或英寸汞
3.SPD-MACH(速度马赫) 压下此按钮则将SPD 目标变为相应的MACH 目标反之亦然
4.HDG-TRK(航向航迹) 这些方式引导飞机沿着由机组选择的航向或航迹飞行
变成绿色的AVAIL表示APU以成功启动 3.将 APU BLEED 调为ON 提供飞机所需电力,此时可将PACK1/PACK2开启如下图 4.在中央控制台上将油路控制开关MODE向右转到IGN/START[点火]即可启动发动机
*正常情况下先启动2号发动机黄系统由2号发动机驱动液压泵提供压力 用于地面刹车*
2.2俯仰操纵
俯仰是由两个升降舵和可配平的水平安定面(THS)控制的. 升降舵最大偏转角度为机头向上30度和机头向下15度 最大可配平水平安定面(THS)偏转的角度是机头向上13.50 和机头向下40 正常情况下升降舵和安定面由ELAC2计算机控制左右升降舵面由各自的绿 和黄液压传动装置操纵
2.3横滚操纵
由每侧机翼上的一个副翼和4 块扰流板来控制飞机的横滚 副翼最大偏转角为20度 当襟翼放出时副翼放出5度(副翼下垂) 扰流板最大偏转角为35°
2.4控制和指示
1.俯仰配平轮 两个俯仰配平轮提供可配平的水平安定面(THS)的机械操纵并优先于电动操纵 对俯仰配平轮的操纵会断开(A/P)自动驾驶 2.方向舵配平旋钮
在无线电高度30 英尺至2450 英尺之间存在下列条件时近地警告系统(GPWS) 产生音响和目视警告 10.紧急发电启动装置[PSS/320无此功能] 11.飞行操纵FLT CTL \[PSS未模拟此按键] 12.大气数据惯性基准系统ADIRS 大气数据惯性基准系统(ADIRS)向EFIS 系统PFD 和ND 提供温度气压及惯性参数 13.液压控制面板 PTU 动力转换组件 RAT 冲压空气涡轮 黄 蓝 绿 三套液压系统控制电门 14.燃油系统控制面板 燃油泵控制电门 燃油交输电门
A320系列飞机飞控系统计算机及故障处理

A320系列飞机飞控系统计算机及故障处理摘要:A320系列飞机飞控系统采用电传飞行控制系统(fly-by-wire control sys-tem)。
电传飞行控制系统是从上世纪80年代开始在民用飞机上逐步推广使用的飞行控制系统,其实质是一种全权限的控制增稳系统。
驾驶员通过操纵装置侧杆、脚蹬发出控制指令,由指令传感器将驾驶员的机械指令转换成电信号指令,并由线路传输到飞控计算机,再通过线路将操纵信号传递到舵机上的执行机构的电传飞行控制系统。
电传操纵系统取代了以钢索传动为特征的机械操纵系统,没有机械结构,重量更轻;同时因为加入了反馈控制,采取多冗余度设计,其可靠性比起传统的机械式飞行控制系统高,安全性更高,也使飞行员的操纵压力大大减小。
一、功能介绍电子飞行操纵系统包含ELAC,SEC,飞行操纵数据集中器(FCDC)和垂直加速计。
根据下面的原理建立EFCS:1、冗余和不同EFCS包含二个ELAC,三个SEC,二个FCDCs和四个加速计。
ELAC和SEC都能够完成飞机的横滚和俯仰控制。
这2个类型的计算机的区别在于他们的内部构造,硬件,微处理器的类型,软件。
对于每个计算机类型,控制和监控软件是不同的。
2、监控按下列步骤完成每个计算机(ELAC,SEC)的监控:监控频道:每个计算机包含二个物理和电气分离的通道,一是专用于控制功能,另一个用于监控这些控制功能。
这两个通道使用不同的数字流程完成作动筒指令信号计算。
监控通道一直在比较这些计算的结果并在发生偏差时禁止信号到达作动筒。
自监控能力:每个通道能够探测它接收或发射的重要信号故障,通过测试处理器探测内部故障,以及监控其内部电源。
串话:每个控制和相关的监控通道经数字总线永久地交换信息,以此巩固和确认从不同的传感器接收的信息。
在没有活动舵面的情况下,自动的电源接通和压力接通安全测试执行。
3、安装安装应考虑下面的原理:导线安装:特定的接头用于EFCS。
电路1用于由应急电源供电的项目,电路2用于正常电源供电的项目。
A320电子飞行仪表系统EFIS概况

MENU 系统概况
1/9
四个EFIS显示(电子式飞行仪表系统) 给飞行员提供飞行数据,并且提供了一种安 全、有效的方法操纵飞机。
EFIS
MENU 系统概况
2/9
主飞行显示(PFD)显示飞行数据,导航 显示(ND)显示导航数据。
ELECTRONIC FLIGHT INSTRUMENT SYSTEM
PFD1 EFIS
ND1
ND2 MENU 系统概况
PFD2
3/9
每个飞行员有一个EFIS控制面板,用于 选择EFIS屏幕上的显示内容。
EFIS
MENU 系统概况
4/9
EFIS控制面板分成两个部分:一部分控 制PFD,另一部分控制ND。
EFIS
MENU 系统概况
5/9
在遮光板的中部是飞行控制组件(FCU)。FCU是飞行员与自动飞 行系统之间的接口组件。
FCU的使用将在自动飞行部分中讲述。 FCU上有一些选择器,这些选择器会影响到PFD 和ND上的指示。 在EFIS章节中我们只讨论这些选择器。
EFIS
MENU 系统概况
6/9
SPEED HEADING
ALTITUDE
这些选择器与相应的指示用于:
• 速度 • 航向 • 高度
在本章节和以下的部分中你将看到这些选择器是如何影响EFIS显 示的。
MENU 系统概况
本章已完成
9/9 NEXT
主题列表
EFIS概况 EFIS控制 FCU 时钟
AUDIO RETURN
GLOSSARY
FCOM EXIT
EFIS
MENU 系统概况
10/9
EFIS
MENU 系统概况
a320飞机自动飞行系统工作模式研究

Internal Combustion Engine &Parts0引言随着民用飞机复杂程度和自动化程度的不断提升,作为其重要机载系统之一的自动飞行系统已经成为影响民用飞机飞行安全的重要因素。
目前关于自动飞行系统的研究也越来越多,其中,不同飞行阶段工作模式的切换是必不可少的研究内容。
因为民用飞机自动飞行工作模式的种类非常多,通常可达到几十种,并且在满足不同飞行阶段(起飞、爬升、巡航、下滑、进近、着陆等)条件下可以直接或间接进行工作模式切换,这种切换会直接影响飞机飞行的经济性和可靠性。
各种工作模式之间的逻辑关系非常复杂,特别需要考虑以下问题[1][2]:①当改变飞行阶段时,工作模式的切换逻辑是否合理;②诸多工作模式间是否可以兼容;③当存在多种模式同时工作时,会不会发生混淆。
本文以此为背景,对自动飞行系统各个工作模式及其之间的逻辑切换进行分析和研究。
1自动飞行工作模式分析自动飞行过程是由有限的工作方式组成的,可用两种自动驾驶和飞行指引仪的方式来引导飞机,即管理的方式和选择的方式。
这两种方式与水平剖面、垂直剖面、速度剖面的相互关系如表1所示。
本节在对自动飞行系统工作模式理论研究的基础上,结合自动推力对引导方式的影响,将工作模式分别处于并列关系的三种模式:水平模式(Lateral Modes )、垂直模式(Vertical Modes )和自动推力模式(Autothrottle Modes )。
根据各种工作方式之间的转换关系,可将每种工作模式进一步划分为几类子模式。
其中,水平模式包括:导航模式(NAV_mode )、航向-航迹方式(HDG-TRK_mode )、下滑道模式(LOC_mode );垂直模式包括:速度基准模式(SRS_mode )、高度截获模式(ALT*_mode )、高度保持模式(ALT_mode )、高度层改变模式(LVL/CH_mode )、垂直速度模式(VS_mode )、下滑道模式(G/S_mode )、拉平模式(Flare_mode )、进近模式(APP_mode )、复飞模式(GA_mode );自动推力模式包括:推力模式(THRUST_mode )、速度/马赫模式(SPD/MACH_mode )、收回模式(RETARD_mode ),如图1所示。
19-A320自动飞行系统飞行方式信号牌

我们已经知道FMGC的一个主要的输入设备是FCU。
良好的CRM要求用适当的输出信息验证所有输入信息。
几乎在所有情况下,当你在FCU上进行输入时,你应在PFD上检查你的动作,并且在大多数时候,你将在飞行方式信号牌(FMA )上进行验证。
FMA位于PFD的顶部。
让我们更为具体地讨论一下FMA。
正如你所看到的,FMA分成5栏。
推力推力垂直推力垂直横向推力垂直横向进近能力●第一栏显示推力。
自动推力的方式显示在这一栏,●第二栏显示自动驾驶仪和飞行指引仪的垂直方式,●第三栏显示自动驾驶仪和飞行指引仪的横滚方式,●第四栏给出自动飞行系统的进近能力,最后一栏显示飞行制导系统、自动驾驶仪、飞行指引仪和自动推力的接通状态。
推力垂直横向进近能力自动飞行飞行制导自动推力接通状态公共方式在特定的情况下,第二和第三栏合在一起显示一个单一的自动驾驶仪/飞行指引仪方式,该方式是横向和垂直所共有的方式。
这些方式称为公共方式,出现在进近和着陆期间。
你将在以后的模块中学到所有的方式。
FMA的每一栏中可显示三行。
我们先看一下最前面的三栏。
第一行显示飞行制导系统当前接通的方式:●在此例中,自动推力接通的是速度方式。
这意味着自动推力将管理推力以提供所需的速度或目标速度。
●垂直方式接通的是高度(ALT)方式。
这意味着自动驾驶仪/飞行指引仪将提供制导以保持高度。
●横向方式接通的是航向(HDG)方式。
这意味着自动驾驶仪/飞行指引仪将提供制导以保持航向。
注:颜色代码将在以后讨论管理制导和选择制导时解释。
第二行显示飞行制导系统待命的方式。
在所示的例子中,蓝色的G/S和LOC表示下滑道和航道信标截获方式已待命。
第三行显示提示和信息。
在此例中,”CHECK APP SEL”提醒我们检查所选择的进近。
注:有一些信息会跨栏显示。
现在我们看一下第四栏。
最后两栏中各行的逻辑与前三栏不同。
第四栏提供有关进近的信息。
前两行告诉我们自动飞行系统着陆能力为III类盲降进近:故障的积极保护方式(fail-active )(例如:3b类盲降)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动飞行系统概述—控制
➢ FCU和MCDU提供驾驶员控制FMGC的功能; ➢ FAC衔接按钮和方向舵配平控制板用于衔接
FAC; ➢ MCDU用于飞机的长期控制,是机组和FMGC
跟踪飞行管理的接口; ➢ FCU用于飞机的短期控制,并提供一个将从
FMGC来的发动机数据传送到全作动数字式发 动机控制(FADEC)的重要的接口。
自动飞行系统概述—其它系统
AFS与大量的飞机系统相连接,与自动飞行系统 交换数据的系统,例如: ➢ 从大气数据惯性基准系统(ADIRS)接收飞机高度 和飞机姿态数据; ➢ 向升降舵和副翼计算机(ELACs)发送自动驾驶仪 指令。
飞行增稳计算机(FAC)
飞行增稳计算机(FAC)的基本功能是: ➢ 偏航阻尼器; ➢ 方向舵配平; ➢ 方向舵偏转角度限制;
• 利用来自ADIRU、起落架控制和接口组件(LGCIU)、 FMGC和缝翼襟翼控制计算机(SFCC)的数据计算的 特性速度,并在PFD上显示。
• 迎角探测(攻角极限)和风切变探测信号传输给 FMGC;
• 低速警告信号计算发送到飞行警告计算机(FWC), FWC产生一个 “SPEED, SPEED, SPEED”语音警告。
➢ 飞行包络保护。
FAC—偏航阻尼器
偏航阻尼器有四个功能,其通过偏转阻尼器作动筒控 制方向舵。FAC接收FMGC、升降舵副翼计算机 (ELAC)或FAC来的指令。偏航阻尼器提供以下四种 功能: ➢ 抑制荷兰滚 ➢ 协调转弯 ➢ 发动机故障配平 ➢ 偏航轴制导指令执行。
FAC—方向舵配平
来自方向舵配平选择器或FMGC的方向舵配 平指令通过方向舵配平作动筒控制方向舵。方 向舵配平有2种: ➢ 使用RUN TRIM选择器人工配平; ➢ 自动驾驶仪衔接时自动配平;
系统设计思想
自动飞行系统(AFS)计算指令并自动地控制飞行 操纵系统和发动机; ➢ 自动飞行系统计算指令并发送至电子飞行控制系统 (EFCS)和全权数字式发动机控制(FADEC),从而控 制飞机各操纵面和发动机; ➢ 当AFS没有衔接时,一些特殊的装置仍然发出指令 (如:侧杆和推力杆),这些指令直接加给电子飞行 控制系统(EFCS)和全权数字式发动机控制 (FADEC),来完成对飞行操纵面和发动机的控制。
系统设计思想
➢ AFS/电传操纵系统—当衔接了自动飞行系统,如果驾 驶员移动侧杆,则自动驾驶仪断开,返回到人工操纵。 当再次松开侧杆时,电子飞行控制系统将飞机保持在 当时的飞行姿态。
➢ 系统设计-为了满足可靠性的要求,AFS含有四个计算 机:两个飞行管理和制导计算机(FMGC)和两个飞 行增稳计算机(FAC)。
自动飞行与显示系统
第22章 自动飞行 第31章 通用显示系统 第34章 导航系统
第22章 自动飞行
• 自动飞行系统概述 • 飞行增稳系统 • 飞行制导系统 • 飞行管理系统
自动飞行系统
• 系统设计思想 • FMGC总述: • 系统描述 • FAC总述 • 飞行指引仪 • 自动推力-系统控制与指示 • 基本工作原理
FAC—控制/显示
➢ 每个FAC接收其自己有关按钮(如:RUD TRIM选择器、 RUD TRIM RESET按钮)的输入,。
➢ RUD TRIM选择器驱动方向舵偏转; ➢ RESET按钮使方向舵回到中立零位。 ➢ FAC计算出的一些数据显示在: FAC计算的特性速度
显示在PFD的速度带上; ➢ 方向舵配平位置显示在ECAM系统显示器上和RUD
TRIM控制板上; ➢ 红色的“WINDSHSR”显示在两个PFD中间。 注:方向舵偏转限制位置没有显示,在ECAM上仅仅显
示是的方向舵最大偏转位置。
FMGC—控制
FMGC主要功能是:飞行管理和飞行 制导。主要通过MCDU和飞行控制组件 (FCU)来控制。典型的工作是: ➢ 起飞前,驾驶员在MCDU上输入飞行计 划; ➢ 飞行中,驾驶员在FCU上衔接自动驾驶 仪、修改飞行参数用以控制飞机飞行。
系统设计思想
系统设计思想
➢ 导航—自动飞行系统基本的功能是计算飞机的位置。 系统利用一些飞机传感器给出的信息,计算飞机位置。
➢ 飞行计划—在自动飞行系统的存储器中存储着由航空 公司预先制订的飞行计划。飞行计划描述了一条完整 的由起飞到目的地的计划,包括:垂直信息和所有的 中间航路点,飞行计划可以在显示器上显示。
FAC—方向舵偏转极限
方向舵偏转限制功能是根据飞机速度限 制方向舵的偏转角度,阻止对飞机性能 不利的过大方向舵偏转。飞机速度信息 由ADIRS提供。即提供: ➢ 限制方向舵的偏转角度; ➢ 预防飞行性能恶化情况下的超限偏转;
FAC—飞行包络保护
飞行包络保护,FAC计算出飞机在飞行过程中的各种特 性速度,低紧急警告、迎角探测和风切变探测。
➢ 工作—有多种使用自动飞行系统的途径。正常的和推 荐的途径是自动飞行系统自动地跟踪飞行计划 计划,AFS能够计算出指令,并将指令发送至舵面和 发动机,以便飞机跟踪飞行计划。在自动飞行系统工 作中,驾驶员起着重要的监控作用。在AFS期间,侧 杆和推力杆不能够自动移动。
自动飞行系统概述—FMGC
飞机上安装了两个可以互换的FMGC。每个 FMGC包括两个部分:飞行管理部分,称为 “FM”部分、和飞行制导部分,称为“FG”部 分。 ➢ 飞行管理部分提供飞行计划确定、修正和监控 方面的功能。 ➢ 飞行制导部分提供飞行控制方面的功能。
自动飞行系统概述—FAC
FAC的基本功能是方向舵控制和飞行包络保护。
MCDU控制部分
基本上,MCDU提供机组和FMGC之间 一个长期控制。MCDU允许,如: • 飞行计划的输入或确定,飞行计划的修 改和显示; • 显示说选择和修改的与飞行管理功能有 关的飞行参数; • 特殊功能的选择。
每个飞行管理和制导计算机(FMGC)和每个飞行增 稳计算机(FAC)都有一个指令部分和一个监控部分。
自动飞行系统概述
自动飞行系统(AFS)减轻驾驶员的工作 负担,提高飞行安全性,提高飞行自动 调节性。自动飞行系统由以下系统组成:
➢ 2个飞行管理和制导计算机(FMGC) ➢ 2个飞行增稳计算机(FAC); ➢ 2个多功能控制显示组件(MCDU); ➢ 1个飞行控制组件(FCU)。