线性系统理论综述
什么是线性系统线性系统的简介

什么是线性系统线性系统的简介线性系统是一数学模型,是指用线性运算子组成的系统。
那么你对线性系统了解多少呢?以下是由店铺整理关于什么是线性系统的内容,希望大家喜欢!线性系统的简介状态变量和输出变量对于所有可能的输入变量和初始状态都满足叠加原理的系统。
叠加原理是指:如果系统相应于任意两种输入和初始状态(u1(t),x01)和(u2(t),x02)时的状态和输出分别为(x1(t),y1(t))和(x2(t),y2(t)), 则当输入和初始状态为(C1u1(t)+C2u2(t),C1x01+C2x02)时,系统的状态和输出必为(C1x1(t)+C2x2(t),C1y1(t)+C2y2(t)),其中x表示状态,y表示输出,u表示输入,C1和C2为任意实数。
一个由线性元部件所组成的系统必是线性系统。
但是,相反的命题在某些情况下可能不成立。
线性系统的状态变量(或输入变量)与输出变量间的因果关系可用一组线性微分方程或差分方程来描述,这种方程称为系统的数学模型。
作为叠加性质的直接结果,线性系统的一个重要性质是系统的响应可以分解为两个部分:零输入响应和零状态响应。
前者指由非零初始状态所引起的响应;后者则指由输入引起的响应。
两者可分别计算。
这一性质为线性系统的分析和研究带来很大方便。
严格地说,实际的物理系统都不可能是线性系统。
但是,通过近似处理和合理简化,大量的物理系统都可在足够准确的意义下和一定的范围内视为线性系统进行分析。
例如一个电子放大器,在小信号下就可以看作是一个线性放大器,只是在大范围时才需要考虑其饱和特性即非线性特性。
线性系统的理论比较完整,也便于应用,所以有时对非线性系统也近似地用线性系统来处理。
例如在处理输出轴上的摩擦力矩时,常将静摩擦当作与速度成比例的粘性摩擦来处理,以便于得出一些可用来指导设计的结论。
从这个意义上来说,线性系统是一类得到广泛应用的系统。
线性的概念线性linear,指量与量之间按比例、成直线的关系,在数学上可以理解为一阶导数为常数的函数;非线性non-linear则指不按比例、不成直线的关系,一阶导数不为常数。
线性系统理论总结ppt

线性系统理论总结ppt
一、线性系统简介
1.线性系统定义:
线性系统是指用线性微分方程、线性积分方程和线性算子(算子运算)来表示、描述和分析的一个系统。
这种系统的输入输出之间的关系可以表
示为线性函数的形式。
2.线性系统的实例:
线性系统的例子包括信号处理、控制系统、数字图像处理、模式识别
等等。
线性系统的应用也很广泛,可以应用在机器人、汽车、航空、通信、医疗和金融等行业中。
二、线性系统的演示
1.系统模型:
线性系统通常用状态空间模型来描述,该模型由一组线性微分方程以
及输入、输出和内部状态变量组成。
该模型的工作原理是:系统的输入到
达模型的输入,系统的内部状态变量发生改变,然后将内部状态变量产生
的输出发送到系统的输出端。
2.系统特性:
线性系统具有许多特性,包括平衡点、平稳性、稳定性、反馈和动力
学建模等等。
这些特性是线性系统能够更好地实现高效操作和有效控制的
基础。
三、线性系统的分析
1.状态变量分析:
状态变量是描述系统当前状态的量,它们通过系统的状态转移方程的变化反映系统的行为。
状态变量的分析包括:求出状态变量的收敛状态,判断系统的稳。
线性系统理论
系统:系统一词来源于英文system的音译,即若干部分相互联系、相互作用,形成的具有某些功能的整体。
中国著名学者钱学森认为:系统是由相互作用相互依赖的若干组成部分结合而成的,具有特定功能的有机整体,而且这个有机整体又是它从属的更大系统的组成部分。
线性系统:线性系统是一数学模型,是指用线性运算子组成的系统。
相较于非线性系统,线性系统的特性比较简单。
线性系统需满足线性的特性,若线性系统还满足非时变性(即系统的输入信号若延迟τ秒,那么得到的输出除了这τ秒延时以外是完全相同的),则称为线性时不变系统。
线性系统理论:系统控制的理论与实践被认为是20世纪中对人类生产和社会生活活动产生重大影响的科学领域之一。
其中,线性系统理论是系统控制理论的一个最为基本的与成熟发展的分支。
概述:线性系统科学技术是一门应用性很强的学科,面对着各种各样错综错杂的系统,控制对象可能是确定性的,也可能是随机性的,控制方法可能是常规控制,也可能需要最优化控制。
控制理论和社会生产及科学技术的发展密切相关,近代得到极为迅速的发展。
线性系统理论是现代控制理论中最基础、最成熟的分支,是控制科学重要课程之一。
线性系统理论内容丰富、思想深刻、方法多样、充满美感,不仅提供了对线性控制系统进行建模、分析、综合系统完整的理论,而且其中蕴涵着许多处理复杂问题的方法,这些方法使系统的建模、分析、综合得以简化,为系统控制理论的其它分支乃至其它学科提供了可借鉴的思路,它们是解决复杂问题的一条有效途径。
主要特点:与经典线性控制理论相比,现代线性系统理论的主要特点是:研究对象一般是多变量线性系统;除输入变量和输出变量外,还着重考虑描述系统内部状态的状态变量;在分析和综合方法方面以时域方法为主,兼而采用频域方法;使用更多的数学工具,除经典理论中使用的拉普拉斯变换外,现代线性系统理论大量使用线性代数、矩阵理论和微分方程理论等。
电子工程中的线性系统理论
电子工程中的线性系统理论线性系统理论是电子工程中非常重要的一部分内容。
其涉及到信号处理、控制系统、通信系统等多个领域。
本文将对线性系统理论的定义、特征、基本理论等方面进行简要介绍。
一、线性系统的定义线性系统是指其输入和输出具有线性关系的系统。
简单地说,就是许多输入信号叠加组成的输出信号,与单独输入信号的输出信号相加之和完全相同。
其中输入信号可以是电压、电流、功率等,输出信号也可以是同样的类型。
例如,如果一个系统的输入信号为 $x_1$ 和 $x_2$,对应的输出信号为 $y_1$ 和 $y_2$,则该系统是线性的,当且仅当:$$y_1 = ax_1 + bx_2 \\y_2 = cx_1 + dx_2$$其中 $a,b,c,d$ 均为常量。
二、线性系统的特征1. 叠加性:线性系统具有叠加性,即当系统中输入信号为$x_1$ 和 $x_2$ 时,对应的输出信号分别为 $y_1$ 和 $y_2$,则系统中同时输入 $x_1+x_2$ 时,输出信号为 $y_1+y_2$。
2. 抑制性:线性系统具有抑制性,即输入信号越大,输出信号越小。
如果输入信号的某一部分被视为噪声,则线性系统可以减小噪声的影响,同时保持信号的大部分原始信息。
3. 延时特性:线性系统具有延时特性,即在特定的时间段内输入信号可以得到响应。
例如,音频系统在接收到输入信号后需要一定时间来处理信号,并绘制出相应的声音波形。
三、线性系统的基本理论1. 系统函数和频率响应系统函数是将输入信号转换为输出信号的函数,通常用$H(s)$ 或 $H(jw)$ 表示,其中 $s$ 是连续时间变量,$jw$ 是离散时间变量,表示系统的频率响应。
频率响应是指系统在不同频率下的输出功率和输入功率之比,通常用 $H(jw)$ 表示。
2. 系统的稳定性稳定性是指系统在输入端输入有限信号时输出端不会产生无限响应的性质。
在线性系统中,通常采用相对稳定性来描述系统的稳定性,这意味着系统相对于任意有限的输入信号都稳定。
线性系统文献综述

Principal component analysis in linear systems: Controllability, observability, and model reduction线性系统中主成分分析:可控性,可观性,并减少模型Kalman's minimal realization theory involves geometric objects (controllable, unobservable subspaces) which are subject to structural instability. Specifically, arbitrarily small perturbations in a model may cause a change in the dimensions of the associated subspaces. This situation is manifested in computational difficulties which arise in attempts to apply textbook algorithms for computing a minimal realization. Structural instability associated with geometric theories is not unique to control; it arises in the theory of linear equations as well. In this setting, the computational problems have been studied for decades and excellent tools have been developed for coping with the situation. One of the main goals of this paper is to call attention to principal component analysis (Hotelling, 1933), and an algorithm (Golub and Reinsch, 1970) for computing the singular value decompositon of a matrix. Together they form a powerful tool for coping with structural instability in dynamic systems. As developed in this paper, principal component analysis is a technique for analyzing signals. (Singular value decomposition provides the computational machinery.) For this reason, Kalman's minimal realization theory is recast in terms of responses to injected signals. Application of the signal analysis to controllability and observability leads to a coordinate system in which the "internally balanced" model has special properties. For asymptotically stable systems, this yields working approximations of X_{c}, X_{bar{o}}, the controllable and unobservable subspaces. It is proposed that a natural first step in model reduction is to apply the mechanics of minimal realization using these working subspaces.卡尔曼的最小实现理论涉及几何对象(可控,不可观测子空间)所承受的结构性不稳定。
线性系统理论全

稳定性判据与判定方法
稳定性判据
在控制工程中,常用的稳定性判据有Routh判据、Nyquist判据、 Bode判据等。这些判据通过分析系统的特征方程或频率响应来判 断系统的稳定性。
判定方法
除了使用稳定性判据外,还可以通过时域仿真、频域分析、根轨 迹法等方法来判定系统的稳定性。这些方法各有优缺点,适用于 不同类型的线性系统和不同的问题背景。
100%
线性偏差分方程
处理离散空间和时间的问题,如 数字滤波器和图像处理等。
80%
初始条件与边界条件
在差分方程中,初始条件确定系 统的起始状态。
状态空间模型
状态变量与状态方程
表示系统内部状态的变化规律 ,揭示系统动态特性。
输出方程
描述系统输出与状态变量和输 入的关系,反映系统对外部激 励的响应。
状态空间表达式的建立
复频域分析法
拉普拉斯变换
将时域信号转换为复频域信号,便于分析系统的稳定性和动态性 能。
系统函数
描述Байду номын сангаас统传递函数的复频域表示,反映系统的固有特性和对输入信 号的响应能力。
极点、零点与稳定性
通过分析系统函数的极点和零点分布,可以判断系统的稳定性以及 动态性能。
04
线性系统稳定性分析
BIBO稳定性
01
线性系统理论全
目
CONTENCT
录
• 线性系统基本概念 • 线性系统数学模型 • 线性系统分析方法 • 线性系统稳定性分析 • 线性系统能控性与能观性分析 • 线性系统优化与综合设计
01
线性系统基本概念
线性系统定义与性质
线性系统定义
满足叠加性与均匀性的系统。
线性系统性质
线性系统理论

线性系统理论实际系统都是为完成预定任务而由一些物理部件组成的集合体,可以具有完全不同的属性。
在系统分析和设计中,常常把实际系统抽象为一个一般意义下的系统模型。
由于研究目的不同,一个实际系统可以有不同的系统模型,一旦获得系统模型,就要建立起系统模型的数学方程描述。
控制理论的主要研究对象是动态系统,这类系统通常也称为动力学系统。
在经典控制理论中,系统的数学方程描述建立在系统高阶微分方程或传递函数的基础之上,仅能描述系统输入输出之间的外部特性,不能揭示系统内部各物理量的运动规律。
线性系统理论引入状态空间的概念,系统的状态空间描述由状态方程和输出方程组成,不仅描述了系统输入输出之间的外部关系,还揭示了系统内部的结构特征,是一种完全的描述。
线性系统理论主要研究线性系统状态空间描述的建立及模型转换、状态的运动规律,揭示系统中固有的结构特性,建立系统的结构、参数和性能之间的定性和定量关系,以及为满足工程指标要求而采取的各类控制器设计方法,以改善闭环系统的性能。
通常,研究系统运动规律的问题称为分析问题,研究改变运动规律的可能性和方法称为综合问题。
线性系统的分析问题还可以进一步分为“定量分析”和“定性分析”。
定量分析关心的问题是系统对某一输入信号的实际响应和性能,从数学角度来看,就是求解作为系统数学模型的微分方程组或差分方程组;定性分析着重研究对系统性能和控制具有重要意义的基本结构特性,如稳定性、能控性和能观性等。
线性系统的综合问题是线性系统分析的一个反命题,如果所得到的系统响应不能令人满意,就要对闭环系统加以改善或优化,这需要在闭环系统中引入控制器来完成,其目的就是使系统的性能达到期望的指标或实现最优化。
由于许多实际系统在一定条件下可用线性系统模型加以描述,所以线性系统理论在控制理论领域得到优先研究和发展,并成为最为基本、应用最广和比较成熟的一个分支。
线性系统理论所研究的概念、原理、方法和结论为最优控制、最优估计、系统辨识、自适应控制、鲁棒控制和非线性控制等许多学科分支提供了预备知识。
线性系统理论汇总

非线性序
序列中存在分支、闭合环路或者其他复杂 情形。
当实际问题被表示为数学形式,特别是解析 形式时,线性与非线性的区别显而易见,只 包含变量的一次项是线性特性,企业的均为 非线性特性。而没有给出数学表达式的实际 现象往往可以通过直观的判断。
能够用线性数学模型描述的系统
称为线性系统。
所具有线性基本特性:
一对多
变量之间的 关系
多对多 多对一
一对一•
变量之间最简单最 基本的对应关系
函数
线性函数
因变量和自变量成比例 的变化,即变化过程中 二者的比值不变,称 为线性函数
非线性函数
因变量和自变量之间的 变化过程中二者的比值 变化
最简单的一元线性函数的一般形式为: y=ax+b
a:代表因变量与自变量的不同比率 线性静态系统 b: 线性函数的截距
截距
有实际意义,函数形式为y=ax+b
没有实际意义,则 x1=x+ b/a
y=ax1
简单的变量关系用一元函数表示
较为复杂的变量关系须用多元函数表示 如,z=ax+by,函数所表示的图形就是3维空间 中的一张平面。
函数仅仅是描述一个变量对另一个变量的 依存关系,如果要表示多个变量之间的相互 依存关系,则应该用以下的数学形式:
y
x
x
t
不稳定结点,如组织溃散、文化感弱的团队会越来越难以 形成一个有机的有力整体。
y x
x t
稳定结点,如团队的建立,起初建立起来的团队是动荡 不稳定的,但是最后有一个趋于稳定有效的过程。
y x
y x
两张图分别表示稳定焦点和不稳定焦点,举例来说就如企 业团队在合作的过程中团队成员向团队核心人物靠拢或着 远离团队领导人。
线性系统理论

线性系统理论线性系统理论是一个广泛应用的数学分支,该分支研究线性系统的性质、行为和解决方案。
线性系统可以描述很多现实世界中的问题,包括电子、机械、化学和经济系统等。
在这篇文章中,我们将探讨线性系统理论的基础、应用、稳定性和控制等不同方面。
一、线性系统基础线性系统是一种对于输入响应线性的系统。
当输入为零时,系统的响应为零,称之为零输入响应。
当没有外界干扰时,系统内部存在固有的动态响应,称之为自然响应。
当有外界输入时,系统将对输入做出响应,称之为强制响应。
线性系统具有很多性质,可以让我们更好地理解系统的行为。
其中一个重要的性质是线性可加性,就是说当输入是线性可加的时候,输出也是线性可加的。
换句话说,如果我们有两个输入信号,将它们分别输入到系统中,我们可以在系统的输出中将它们加起来,并得到对应的输出信号。
另外一个重要的性质是时不变性,就是说当输入信号的时间变化时,输出信号的时间变化也会随之发生。
这个性质告诉我们,系统的行为不随着时间的改变而改变。
除此之外,线性系统还有其他很多性质,比如可逆性、稳定性、因果性等等。
二、线性系统的应用线性系统有着广泛的应用,它们可以用来描述很多各种各样的问题,包括但不限于电子电路、航天控制、化学反应、经济系统等等。
下面我们来看看这些应用领域中的具体案例。
1. 电子电路线性系统在电子电路中有着广泛应用。
例如,如果我们想要设计一个低通滤波器,以使高频信号被抑制,我们可以使用线性系统来描述它的行为。
我们可以将电子电路看作一个输入信号到输出信号的转换器。
这个转换器的输出信号可以通过控制电子器件的电流、电压等参数来实现。
这种线性系统可以用来滤掉任何频率的信号,因此在广播和通信中也有广泛的应用。
2. 航天控制航天控制是线性系统理论的一个应用重点。
它包括控制飞行器姿态、轨道以及动力学行为。
在这些问题中,线性可变系统被广泛应用。
这种系统的输出信号是受到飞行器的控制和环境因素的影响。
控制器的任务是计算信号,以引导飞行员和总体系统实现期望的性能和特征。
线性系统
线性系统理论论文论文题目:线性系统理论综述—连续系统线性二次最优控制学院:年级:专业:姓名:学号:指导教师:目录摘要 (3)前言 (3)第一章线性系统理论概述 (3)1.1线性系统理论的研究对象 (4)1.2 线性系统理论的主要任务 (4)1.3 线性系统的主要学派 (5)1.4 现代线性系统的主要特点 (5)1.5 线性系统的发展 (6)第二章连续系统线性二次最优控制 (6)2.1最优控制问题 (6)2.2最优控制的性能指标 (7)2.3 最优控制问题的求解方法 (8)2.4 线性二次型最优控制 (9)2.5 连续系统线性二次型最优控制实例 (10)2.6 小结 (13)总结 (13)参考文献 (13)摘要线性系统理论是现代控制理论中最基本、最重要也是最成熟的一个分支,是生产过程控制、信息处理、通信系统、网络系统等多方面的基础理论。
本文对线性系统的历史背景、研究现状和发展趋势作了简单的综述。
线性二次最优控制理论内容丰富、应用广泛,引起广泛地关注并取得了丰硕成果。
最优控制问题就是在一切可能的控制方案中寻找一个控制系统的最优控制方案或最优控制规律,使系统能最优地达到预期的目标。
本文基于连续系统线性二次最优控制,提出新的控制算法并结合实例进行了仿真验证。
关键字:线性系统;线性二次最优控制;控制系统;连续系统前言线性系统理主要阐述线性系统时域理论,给出了线性系统状态空间的概念、组成方法和基本性质,进而导出系统的状态空间描述。
以状态空间法为主要工具研究多变量线性系统的理论[1]。
随着计算机技术的发展,以线性系统为对象的计算方法和计算辅助设计问题也受到普遍的重视。
与经典线性控制理论相比,现代线性系统主要特点是:研究对象一般是多变量线性系统,而经典线性理论则以单输入单输出系统为对象;除输入和输出变量外,还描述系统内部状态的变量;在分析和综合方面以时域方法为主而经典理论主要采用频域方法;使用更多数据工具。
随着航海、航天、导航和控制技术不断深入研究,系统的最优化问题已成为一个重要的问题。
线性系统理论
linearsystemstheory以状态空间法为主要工具研究多变量线性系统的理论。
20世纪50年代以后,随着航天等技术发展和控制理论应用范围的扩大,经典线性控制理论的局限性日趋明显,它既不能满足实际需要,也不能解决理论本身提出的一些问题,这就推动了线性系统的研究,于是在1960年以后从经典阶段发展到现阶段。
美国学者R.E.卡尔曼首先把状态空间法应用于多变量线性系统的研究,提出了能控性和能观测性两个基本概念。
20世纪60年代以后,现代线性系统理论又有了新发展,出现了线性系统几何理论、线性系统代数理论和多变量频域方法等研究多变量系统的新理论和新方法。
随着计算机技术的发展,以线性系统为对象的计算方法和计算辅助设计问题也受到普遍的重视。
与经典线性控制理论相比,现代线性系统主要特点是:研究对象一般是多变量线性系统,而经典线性理论则以单输入单输出系统为对象;除输入和输出变量外,还描述系统内部状态的变量;在分析和综合方面以时域方法为主而经典理论主要采用频域方法;使用更多数据工具。
前言第1章线性系统的数学描述1.1 线性系统的输入.输出描述1.1.1 线性系统1.1.2 非零初始条件与冲激输入1.2 线性系统的状态空间1.2.1 输入.输出描述的局限性1.2.2 状态与状态空间1.2.3 线性系统的状态空间描述1.2.4 物理系统状态方程的建立1.2.5 传递函数矩阵的状态参数矩阵表示1.2.6 传递函数矩阵G(s)的实用计算方法1.2.7 离散系统状态空间的描述1.3 线性系统等价的状态空间描述1.3.1 坐标变换1.3.2 线性定常系统状态空间描述在坐标变换下的特性1.3.3 线性时变系统状态空间描述在坐标变换下的特性1.4 状态方程的对角线规范形与约当规范形1.4.1 状态方程的对角线规范形1.4.2 状态方程的约当规范形1.5 组合系统的状态空间描述和传递函数矩阵1.5.1 子系统的并联联接1.5.2 子系统的串联联接1.5.3 子系统的反馈联接1.6 习题第2章线性系统的运动分析2.1 线性系统运动分析的数学实质2.1.1 运动分析的数学实质2.1.2 状态方程解的存在性和唯一性条件2.1.3 零输入响应和零状态响应及全响应2.2 线性定常系统的运动分析2.2.1 线性定常系统的零输入响应2.2.2 矩阵指数函数的性质2.2.3 几种典型的矩阵指数函数2.2.4 矩阵指数函数的计算方法2.2.5 线性定常系统的零状态响应2.2.6 线性定常系统的全响应及输出响应2.3 线性时变系统的运动分析2.3.1 线性时变系统的零输入响应2.3.2 线性时变系统的零状态响应2.3.3 线性时变系统的全响应及输出响应2.4 状态转移矩阵2.4.1 线性时变系统的状态转移矩阵2.4.2 线性时变系统的状态转移矩阵的性质2.4.3 线性定常系统的状态转移矩阵2.4.4 线性定常系统的状态转移矩阵的性质2.4.5 基于状态转移矩阵表示的线性定常系统的运动规律2.5 线性连续时间系统的时间离散化2.5.1 数字控制系统的基本形式2.5.2 离散化的假设条件2.5.3 线性连续时变系统的离散化2.5.4 线性连续定常系统的离散化2.6 线性离散时间系统的运动分析2.6.1 迭代法求解线性离散系统的状态方程2.6.2 线性离散时间系统的状态转移矩阵2.6.3 线性离散时变系统的状态运动规律2.6.4 线性离散定常系统的状态运动规律2.7 习题第3章线性系统的能控性与能观测性3.1 能控性和能观测性的定义3.1.1 能控性和能观测性的直观讨论3.1.2 能控性的定义3.1.3 能观测性的定义3.2 线性连续时间系统的能控性判据3.2.1 线性定常系统的能控性判据3.2.2 能控性指数3.2.3 线性时变系统的能控性判据3.3 线性连续时间系统的能观测性判据3.3.1 线性定常系统的能观测性判据3.3.2 能观测性指数3.3.3 线性时变系统的能观测性判据3.4 对偶系统与对偶原理3.4.1 对偶系统3.4.2 对偶原理3.5 线性离散时间系统的能控性和能观测性3.5.1 线性离散时间系统的能控性和能达性3.5.2 线性离散时间系统的能控性判据3.5.3 线性离散时间系统的能观测性及其判据3.6 能控规范形和能观测规范形3.6.1 单输入一单输出系统的能控规范形3.6.2 单输入-单输出系统的能观测规范形3.6.3 多输入-多输出系统的能控规范形3.6.4 多输入-多输出系统的能观测规范形3.7 线性系统的结构分解3.7.1 能控性和能观测性在非奇异变换下的特性3.7.2 线性定常系统按能控性的结构分解3.7.3 线性定常系统按能观测性的结构分解3.7.4 线性定常系统的结构规范分解3.8 习题第4章传递函数矩阵的状态空间实现4.1 传递函数的能控和能观测规范形实现4.1.1 单输入-单输出系统传递函数的实现4.1.2 单输入一多输出系统传递函数的实现4.1.3 多输入.单输出系统传递函数的实现4.1.4 多输入.多输出系统传递函数的实现4.2 最小实现及其性质4.3 最小实现的解法4.3.1 降价法4.3.2 直接求取约当规范形的最小实现方法4.3.3 用汉克尔法直接求取传递函数矩阵的最小实现4.4 习题第5章系统运动的稳定性5.1 外部稳定性和内部稳定性5.1.1 外部稳定性5.1.2 内部稳定性j5.1.3 内部稳定性和外部稳定性的关系5.2 李亚普诺夫稳定性理论5.2.1 李亚普诺夫第一法和第二法5.2.2 自治系统、平衡系统和受扰系统5.2.3 李亚普诺夫意义下的稳定5.2.4 不稳定5.2.5 李亚普诺夫第二法的主要定理5.3 连续时间线性系统的状态运动稳定性判据5.3.1 线性时变系统的稳定性判据5.3.2 线性定常系统的稳定性判据5.4 构造李亚普诺夫函数的规则化方法5.4.1 变量梯度法5.4.2 克拉索夫斯基方法5.5 离散时间系统状态运动的稳定性5.5.1 离散时间非线性定常系统的李亚普诺夫稳定性定理5.5.2 离散时间线性定常系统的稳定性定理5.6 李亚普诺夫直接法在系统综合方面的应用5.6.1 连续时间线性定常系统稳定自d运动的衰减性能的估计5.6.2 平均积分值的计算5.7 习题第6章状态反馈6.1 状态反馈与输出反馈的概念6.2 状态反馈与输出反馈对系统能控性和能观测性的影响6.2.1 状态反馈和输出反馈对系统能控性的影响6.2.2 状态反馈对系统能观测性的影响6.2.3 输出反馈对系统能观测性的影响6.2.4 多输入能控系统转变为单输人能控系统6.3 系统的极点配置6.3.1 极点配置的概念6.3.2 极点配置的条件6.3.3 单输入系统极点配置反馈矩阵的计算方法6.3.4 多输入系统极点配置反馈矩阵的计算方法6.3.5 状态反馈对传递函数的影响6.4 输出反馈极点配置6.5 不完全能控系统状态反馈的极点配置和镇定6.5.1 不完全能控系统状态反馈的极点配置6.5.2 不完全能控系统状态反馈的镇定6.6 状态反馈解耦6.6.1 解耦问题的提法和结构假设6.6.2 系统结构特征量6.6.3 可解耦条件与解耦算法6.7 习题第7章状态观测器7.1 状态观测器的基本概念7.2 全维闭环状态观测器7.3 降维状态观测器7.4 基于观测器的状态反馈系统7.5 Rz函数观测器7.6 习题。
线性系统理论全PPT课件

稳定性是线性系统的一个重要性质,它决定了系统在受到外部干扰后能否恢复到原始状态。如果一个系统是稳定 的,那么当外部干扰消失后,系统将逐渐恢复到原始状态。而不稳定的系统则会持续偏离原始状态。
03
线性系统的数学描述
状态空间模型
01
定义
状态空间模型是一种描述线性动态系统的方法,它通过状态变量和输入
航空航天控制系统的线性化分析
线性化分析
在航空航天控制系统中,由于非线性特性较强,通常需要进行线性化分析以简化系统模 型。通过线性化分析,可以近似描述系统的动态行为,为控制系统设计提供基础。
线性化方法
常用的线性化方法包括泰勒级数展开、状态空间平均法和庞德里亚金方法等。这些方法 可以将非线性系统转化为线性系统,以便于应用线性系统理论进行控制设计。
线性系统理论全ppt课件
• 线性系统理论概述 • 线性系统的基本性质 • 线性系统的数学描述 • 线性系统的分析方法 • 线性系统的设计方法 • 线性系统的应用实例
01
线性系统理论概述
定义与特点
定义
线性系统理论是研究线性系统的 数学分支,主要研究线性系统的 动态行为和性能。
特点
线性系统具有叠加性、时不变性 和因果性等特性,这些特性使得 线性系统理论在控制工程、信号 处理等领域具有广泛的应用。
线性系统的动态性能分析
动态性能指标
描述线性系统动态特性的性能指 标,如超调量、调节时间、振荡
频率等。
状态空间分析法
通过建立和解决线性系统的状态方 程来分析系统的动态性能,可以得 到系统的状态轨迹和响应曲线。
频率域分析法
通过分析线性系统的频率特性来描 述系统的动态性能,可以得到系统 的频率响应曲线和稳定性边界。
线性系统综述报告

线性系统理论应用综述系统控制的理论与实践被认为是20 世纪中对人类生产和社会生活活动产生重大影响的科学领域之一。
其中,线性系统理论是系统控制理论的一个最为基本的与成熟发展的分支。
线性系统理论发展经历了“经典线性系统理论”与“现代线性系统理论” 两个阶段。
经典理论形成于20 世纪三四十年代,以三项理论为标志。
1932年,美国物理学家H.奈奎斯特运用复变函数理论的方法建立了根据频率响应判断反馈系统稳定性的准则;波特(H.W.Bode)于20 世纪40 年代初期引入了波特图;1948年,美国科学家伊万思(W.R.Evans)提出了名为根轨迹的分析方法,用于研究系统参数(如增益)对反馈控制系统的稳定性和运动特性的影响,并于1950年进一步应用于反馈控制系统的设计,构成了经典控制理论的另一核心方法──根轨迹法。
在第二次世界大战中, 经典理论的应用取得了巨大成功。
20 世纪50 年代以后,随着航天等技术的发展和控制理论应用范围的扩大,经典线性控制理论的局限性日趋明显,这种状况推动线性系统的研究,线性系统理论在1960 年开始从经典理论向现代理论过渡。
美国学者卡尔曼(R.E.Kalman)把分析力学中的状态空间描述引入于对多变量线性系统的研究,并提出了能控性和能观测性及相应的判别准则。
1963 年他又和吉尔伯特一起得出揭示线性系统结构分解的重要结果,为现代线性系统理论的形成和发展作了开创性的工作。
20世纪60年代后期和70年代早期,线性二次型理论推广到无穷维系统(即以偏微分方程、泛函微分方程、积分微分方程和在巴拿赫空间的一般微分方程描述的系统)的工作得到很大进展。
20世纪70年代末80年代初,反馈控制的设计问题经历了一个重新修正的过程。
随着人工智能的发展和引入了新的计算机结构,控制理论和计算机科学的联系愈来愈密切,使得最近25年线性系统理论的研究非常活跃。
经典控制理论的主要研究对象是单输入、单输出的线性定常系统。
线性系统理论综述
线性系统理论课程大作业论文线性系统理论综述及其应用这学期学习的线性系统理论属于系统控制理论的一个最为基本和成熟发展的分支,主要包括以下内容:介绍采用系统理论解决工程问题的一般步骤,明确建模、分析、综合在解决实际问题中的作用,并重点介绍线性系统模型的特征和分析方法;介绍系统的状态空间描述,结余状态空间方法的分析和系统结构特征和结构的规范分解以及状态反馈及其性质等。
一.线性系统理论研究内容综述系统是系统控制理论所要研究的对象,从系统控制理论的角度,通常将系统定义为由相互关联和相互制约的若干部分组成的具有特定功能的整体。
动态系统是运动规律按照确定规律或者确定的统计的规律岁时间演化的一类系统,动态系统的行为由各类变量间的关系来表征,系统的变量可以分为三种形式,一类是反映外部对系统的影响或者作用的输入变量组,如控制、投入、扰动等;二是表征系统状态行为的内部状态变量组;三是反映系统外部作用或影响的输入变量组如响应,产出。
表征系统动态的过程的数学描述具有两类基本形式,一是系统的内部描述,另一组是输入变量对状态变量的组的动态影响。
从机制的角度来看,动态系统可被分类为连续系统变量动态系统和离散事件动态系统;从特征的角度,动态系统可分别分类为线性系统和非线性系统,参数集成系统和分布参数系统;从作用时间类型角度,动态系统可被称为连续时间系统和离散时间系统。
线性系统理论是系统控制理论最为成熟和最为基础的分支。
他是现代控制理论的一个重要组成部分,也是对经典控制理论的延申。
现代控制理论主要是着重研究现性状态的运动规律和改变这种规律的可能性和方法。
线性系统的理论和方法是建立在建模的基础上。
在建模的基础上,可以进一步把线性系统的理论进一步区分为“分析理论”和“综合理论”。
分析理论分为定量分析和定性分析,定量分析是着重于研究对系统性能和控制具有重要意义的结构特性。
系统综合理论是建立在分析的基础上,系统综合目的是使系统的性能达到期望的指标或实现最优化。
线性系统文献综述

线性系统理论文献综述摘要本综述论述了广义线性系统的发展和研究现状,能控能观性、观测器设计、故障检测,比较详细地对广义线性系统的特殊问题如能控能观性并讨论了目前研究中存在的问题及将来可能的研究方向。
关键词: 广义线性系统;能控性;能观性;观测器设计;故障检测第一章线性系统内容论述1.1、广义线性系统广义系统又称为奇异系统,广义状态空间系统,微分代数系统等。
广义系统是客观系统的一种自然表示,它可用来描述系统的更多性能特征,已经在大系统、奇异摄动理论、电路理论、等方面得到广泛的应用[ 1 ] 。
由于这些原因,广义系统越来越受到学者的关注,广义线性系统的状态空间表述形式为式中: x ( t) ∈Rn × n 为系统的状态变量,δx ( t) 对连续系统表示微分运算Ûx ( t) , 对离散系统表示超前一步算子x ( t + 1) . u ( t) , yp ( t) 和yd ( t) 分别为系统输入、比例输出和导数输出。
很明显,当E = I时,就是传统的状态空间模型。
如果E为非奇异方阵,可以通过求逆将其转化为正常系统来研究。
但是,矩阵求逆是数值不稳定的。
因此,即使当 E 非奇异时,用广义系统的方法去分析这类系统,从理论上说也是有优势的。
经过30多年的发展,广义线性系统理论取得了丰硕的研究成果。
本文对广义线性理论的发展作一个总结,分析存在的问题并提出一些研究方向。
1.2、能控性及能观性平行于常义线性系统,能控能观性也是刻划广义线性本质属性的重要概念。
无穷远极点的能控性概念最先由Rosenbrock在1974 年提出[ 2 ]。
针对正则广义线性系统考虑能控能观性问题,引入了能观性,C - 能控和R - 能控的概念,并且通过几何和多项式矩阵的观点给出了这些能控能观性的判据。
众所周知,广义系统区别于正常系统的一个重要特征就是有脉冲响应(对连续系统,对离散系统是非因果的),以能达子空间为出发点,对能控性给出了类似文献[ 2 ]的时域刻划,并且澄清了两种无穷远能控性的冲突,采用Weierstrass分解给出了能控能观性的代数判据。
线性系统理论介绍

分析方法: 频率响应、根轨迹 可控、可观、稳定性 优点: 物理意义直观 易于实时控制和最优控制
3、现代控制理论的研究对象
系统是控制理论的研究对象 系统:是由相互关联和相互制约的若干“部分”所组成 的具有特定功能的一个“整体”。 系统基本特征: (1)整体性: 结构上的整体性,系统的行为和功能由整体决定。 (2)抽象性:系统常常抽去了具体系统的物理,自然和社会 含义,而把它抽象为一个一般意义下的系统而 加以研究。 (3)相对性:“系统”和“部分”这种称谓具有相对属性。
第一章 绪论
控制理论发展概况: 第一阶段 20世纪40—60年代 经典控制理论 第二阶段 20世纪60—70年代 现代控制理论 第三阶段 20世纪70—
大系统理论
(广度)
智能控制理论 (深度) 线性系统理论是系统控制理论的一个最为基础和最为成 熟的分支。它以线性代数和微分方程为主要数学工具,以状 态空间法为基础分析和设计控制系统。
线性系统理论着重研究线性系统状态的运动规律和改变 这种规律的可能性和方法,以建立和揭示系统结构、参数、 行为和性能间确定的和定量的关系。 4、主要内容: 数学模型 → 分析理论 → (1)数学模型 输入输出模型: 状态空间模型: 解析法:分析系统机制直接运用物理原理建模。 实验法:通过实验数据(输入输出)建模。 (2)系统分析 定量分析:已知输入求输出的过程,解方程的过程 定性分析:例如稳定性、可控、可观性 综合理论
以一组期望的闭环极点为指标 以闭环系统稳定为指标
镇定配置
以系统输出渐进跟踪某一指定信号为指标 跟踪问题
本门课程的内容安排:
1、系统描述 (第二章)
2、系统分析 定量分析 (第三章) 定性分析:可控、可观性(第四章) 稳定性 (第五章) 极点配置 (第六章) 3、系统综合 镇定配置 跟踪问题(第七章) 输入输出解耦(第八章) 状态观测器设计(第九章)
线性系统理论(xue)
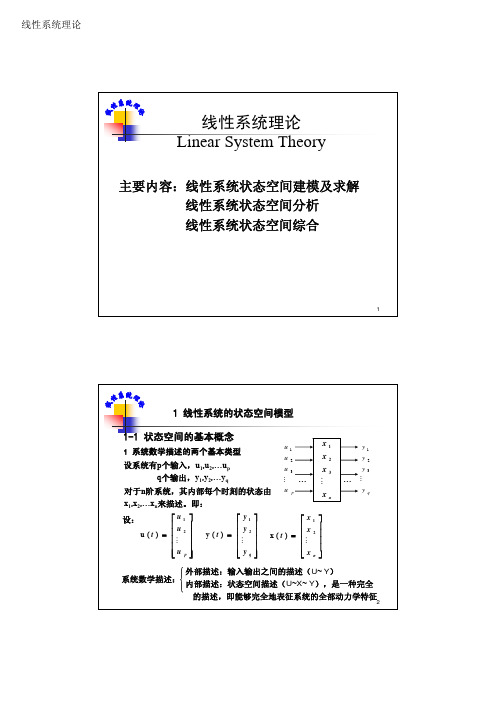
线性系统理论Linear System Theory 1-1 状态空间的基本概念例1-1 图示RLC 网络。
设:u i 为输入变量;u o =u c 为输出变量。
2 状态空间描述中常用的基本概念例1-1 图示RLC 网络。
设:u i 为输入变量;u o =u c 为输出变量。
用矩阵表示状态空间表达式:⎪⎨+−−=u x R x x 11&1-2 线性连续系统状态空间表达式的建立1......)((b s b s b s b s Y G n n ++++−1 N(s)/D(s)的串联分解——可控标准型实现x&x x⎤⎡⎡00010L &状态变量图例1-5 已知系统微分方程:u u T y y y +=ω+ωζ+试求系统的状态空间表达式,并绘制该系统的状态变量图。
21u x x x+ζω−ω−=22&2 可观测标准型实现设可控标准型实现为例1-6 已知系统微分方程:试求可观测标准型实现,并绘制其状态变量图。
3 并联分解——Jordan标准型实现⎤⎡−s L 0001ss s s U s G 89)()(23++==例1-7 已知某系统传递函数:⎡1⎤4 矩阵的特征方程、特征值1)方阵2 线性定常连续系统状态方程的求解2-1 齐次状态方程的解⎢⎣⎥⎦⎢⎣−−=⎥⎦⎢⎣22x 32x &解:用拉氏变换的方法:例2-1 求已知状态方程的状态转移矩阵。
2-2 状态转移矩阵的性质例2-2 已知状态转移矩阵,求Φ-1和系统矩阵A。
性质9 若例2-3已知系统矩阵,求状态转移矩阵及其状态转移矩阵的逆。
非齐次状态方程:例2-4 已知状态空间描述及零初始条件,输入为单位阶跃,求状态方程的解SISO系统:例9-29 已知系统动态方程,试求系统的传递矩阵。
⎡x&9-4-2开环与闭环传递矩阵MIMOU(s)E(s)Y(s)由图可知:3-1 线性系统的可控性与可观性3-1-1 问题的提出例3-2 已知系统状态空间表达式,⎧3-2 可控性问题基本概念考虑线性系统:3-3 可观测性的基本概念3-4 线性定常系统可控性判据考虑线性定常系统:例3-3 判断已知系统的可控性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
线性系统理论课程大作业论文线性系统理论综述及其应用这学期学习的线性系统理论属于系统控制理论的一个最为基本和成熟发展的分支,主要包括以下内容:介绍采用系统理论解决工程问题的一般步骤,明确建模、分析、综合在解决实际问题中的作用,并重点介绍线性系统模型的特征和分析方法;介绍系统的状态空间描述,结余状态空间方法的分析和系统结构特征和结构的规范分解以及状态反馈及其性质等。
一.线性系统理论研究内容综述系统是系统控制理论所要研究的对象,从系统控制理论的角度,通常将系统定义为由相互关联和相互制约的若干部分组成的具有特定功能的整体。
动态系统是运动规律按照确定规律或者确定的统计的规律岁时间演化的一类系统,动态系统的行为由各类变量间的关系来表征,系统的变量可以分为三种形式,一类是反映外部对系统的影响或者作用的输入变量组,如控制、投入、扰动等;二是表征系统状态行为的内部状态变量组;三是反映系统外部作用或影响的输入变量组如响应,产出。
表征系统动态的过程的数学描述具有两类基本形式,一是系统的内部描述,另一组是输入变量对状态变量的组的动态影响。
从机制的角度来看,动态系统可被分类为连续系统变量动态系统和离散事件动态系统;从特征的角度,动态系统可分别分类为线性系统和非线性系统,参数集成系统和分布参数系统;从作用时间类型角度,动态系统可被称为连续时间系统和离散时间系统。
线性系统理论是系统控制理论最为成熟和最为基础的分支。
他是现代控制理论的一个重要组成部分,也是对经典控制理论的延申。
现代控制理论主要是着重研究现性状态的运动规律和改变这种规律的可能性和方法。
线性系统的理论和方法是建立在建模的基础上。
在建模的基础上,可以进一步把线性系统的理论进一步区分为“分析理论”和“综合理论”。
分析理论分为定量分析和定性分析,定量分析是着重于研究对系统性能和控制具有重要意义的结构特性。
系统综合理论是建立在分析的基础上,系统综合目的是使系统的性能达到期望的指标或实现最优化。
线性系统理论的研究对象为线性系统,线性系统为最为简单和最为基本的一类动态系统。
线性系统理论是系统控制理论中最为充分、发展最为成熟和应用最为广泛的一个开支。
线性系统的的一个基本特征是其模型满足线性叠加原理。
对于线性系统的研究也可以进一步分为线性是不变系统和线性时不变系统两类。
对系统进行建模也是控制理论中具有重要的作用。
对系统建模的作用多样性和基本型、途径以及系统的建模的准则=====系统建模的简单性和分析的结果的准确性之间做出适当的折中。
线性控制理论在1960年前后开始了从经典控制理论到现代理论的过渡。
反应这种过渡的重要标志成果是,卡尔曼把在分析力学中广为采用的状态空间描述引入到线性控制中,并在此基础上引入了对研究系统结构和控制具有基本意义的的能控性和能观性的概念。
(一)状态空间的描述状态空间的基本特点是用系统内部描述来取代经典线性控制系统理论中引以为常的传递函数形式的外部输入输出描述,第一个方程称为状态方程,用以描述状态向量与输入向量间的动态关系;第二个方程称为输出方程或测量方程,描述输出向量与状态向量和输入向量之间的线性组合关系。
,,和都是常系数矩阵。
这个模型可用下面的框图表示把系统的的分析和综合置于时间域内。
同时,能控性和能观性的引入,导致了线性系统的分析和综合在指导原则上的一个根本变化,这种内部结构代替外部结构的变化,是现代线性控制理论的根本。
线性系统理论主要包括线性系统的时间域理论和线性系统的复频域理论。
时间域理论主要包括线性系统的状态空间描述和线性运动分析,线性系统的能控性和能观性,系统运动的稳定性,线性反馈系统的时间域综合。
线性系统的状态空间描述是分析和综合的基础。
系统的动态过程的数学实质就是反映各组变量间因果关系的一个数学模型。
可以把数学的模型分为内部描述和外部描述两种基本类型。
系统的外部描述是输入输出描述,外部描述的特点,把系统当“黑箱”处理,用传递函数来表示,而系统的内部描述是把系统当做“白箱”处理,认为系统内部的结构和信息时可以知道的,是一个数学模型,可以两个数学方程来表征。
首先,通过对状态空间的表述,我们至少要表明状态空间和状态的基本概念,以及对状态空间的基本描述的内涵、形式、建立方法、特性和变换,以及其对组合的系统的推广。
接着线性系统理论着重对系统运动规律的定量分析。
分别就连续时间系统和离散时间系统分析。
线性定常连续系统的自由运动在没有控制作用下,线性定常系统由初始条件引起的运动称为线性定常系统的自由运动,可由齐次状态方程描述)()(t Ax t x= 齐次状态方程通常采用幂级数法、凯莱-哈密顿定理和拉普拉斯变换法求解。
幂级数法:设齐次方程的解是t 的向量幂级数+++++=k k t b t b t b b t x 2210)( 式中, ,,,,,10k b b b x 都是n 维向量,且0)0(b x =,求导并考虑状态方程,得)(2)(2210121 +++++=++++=-k k k k t b t b t b b A t kb t b b t x拉普拉斯变换法:取拉氏变换,)0()()(1x A sI s X --=凯莱-哈密顿定理法:矩阵A 满足它自己的特征方程。
即若设n 阶矩阵A 的特征多项式为1110()[]n n n f I A a a a --=-=++++λλλλλ则有 0)(0111=++++=--I a A a A a A A f n n n 线性离散系统的运动分析递推法(迭代法):适合于线性定常和时变系统;G 、H 是定常矩阵。
给定k=0时的初始状态x(0) ,及任意时刻 u(k)由迭代法得:....(1)解的表达式的状态轨迹线是状态空间中一条离散轨迹线。
它与连续系统状态的解很相似。
解的第一部分只与系统的初始状态有关,它是由起始状态引起的自由运动分量。
第二部分是由输入的各次采样信号引起的强迫分量,其值与控制作用u 的大小、性质及系统的结构有关。
[1]()()x k T Gx kT Hu KT +=+232(1)(0)(0)(2)(1)(1)(0)(0)(1)(3)(2)(2)(0)(0)(1)(0)x Gx Hu x Gx Hu G x GHu Hu x Gx Hu G x G hu Ghu Ghu =+=+=++=+=+++10()(0)()k kk j i j x k G x G Hu i ---==+∑(2)在输入引起的响应中,第k 个时刻的状态只取决于所有此刻前的输入采样值,与第k 个时刻的输入采样值无关。
Z 变换法:仅适合于线性定常系统。
由于将G 、H 、U(z)、x(0)代入x(k)的Z 变换式。
线性系统的运动规律分析的实质,归结为相对于给定输入和初始状态求解系统状态求解系统状态方程,建立因果关系的解析形式解。
(二)能控性和能观性在对系统运动分析后,然后围绕能控性和能观性两个基本结构特性,重点是针对连续时间时不变系统。
能控性判别准则-----三个定理(1)线性定常系统完全能控的充要条件是矩阵是满秩的。
若线性定常系统的系数矩阵A 有互不相同的特征值,则系统能控的充要条件是输入矩阵B 没有任何一行的元素全部为零。
若A 为约旦型,则系统能控的充要条件是 : (I )B 中对应于互异的特征值的各行,没有一行的零。
(II )B 中与每个约旦块最后一行相对应的各行,没有一行的元素全为零。
(三)稳定性外部稳定性和内部稳定性1.外部稳定性(BIBO 稳定性)称一个因果系统为外部稳定,如果对任意一个有界输入u(t),即满足条件对应的输出y(t)均为有界,即有2.内部稳定性(渐近稳定性)如果由时刻 任意非零初始条件 引起的状态零输入响应1()()[(0)()]x z zI G zx HU z -=-+()1zU z z =-21[,,,...]n M B AB A B A B -=10(),[,)u t t t β≤<∞∀∈∞20,(),[)y t t t β≤<∞∀∈∞000(),(),[,)x A t x x t x t t ==∈∞0t 00()x t x =对所 为有界,并满足渐近属性即成立。
3.李亚普诺夫意义下运动稳定性的概念:李亚普诺夫第一方法:小范围内稳定性分析方法,泰勒展开,线性化。
李亚普诺夫第二方法:广义能量属性的李亚普诺夫函数。
自治系统:平衡状态:受扰运动:自治系统由初态引起的运动。
(四)线性反馈系统的时间域综合研究控制系统主要有两大类问题:一是:已知控制系统,通过各种手段,如:时域、频域、根轨迹、状态空间等方法和手段 对系统的各种性能进行分析,这就是控制系统的分析问题;二是:对未知的控制系统进行设计使其满足某种性能指标要求,这称为控制系统的综合问题。
无论是经典控制理论还是现代控制理论,反馈都是控制系统设计的主要方式。
经典控制理论用传递函数描述系统,因此只能采用输出反馈;而在现代控制理论中,由于采用系统内部的状态变量来描述系统的特征,所以除了可以采用输出反馈外,还大量使用状态反馈。
在进行控制系统设计时,由于状态反馈能提供更多的校正信息,对于控制系统性能的改善和提高具有很重要的意义。
为了利用系统状态作为反馈量,必须使用传感器来测量状态变量,但由于并不是所有状态变量在物理上均可量测,所以需要用状态观测器来估计系统状态的值。
因此,状态反馈与状态观测器的设计就构成了用状态空间法综合设计控制系统的主要内容。
极点配置问题:如果对控制系统的性能要求用一组给定的极点来描述,控制系统的综合问题就称为极点配置问题;最优控制问题:如果控制系统的性能要求是由某个最优指标描述,这时的控制系统综合就称为最优控制问题。
二.线性系统理论数学模型建立由上述可知,现代线性控制理论与经典理论相比,所采用的方法和算法更适合于在数字计算机上进行,又由于很多实际系统都可用线性系统模型近似的0[,)t t ∈∞()u x t θlim ()0u t x t θ→∞=()0u t =0000(,),(),[,)x f x t x t x x t ==∈∞0(,)0,[,)e e xf x t t t ==∀∈∞描述,所以它的应用范围十分广泛。
在航空、航天、航海、机械、电器、力学等技术领域中,线性系统理论都有应用实例。
在20世纪50年代中期迅速兴起的空间技术,线性系统理论得到了大力推动发展和应用,来解决例如把火箭或飞行器用最少燃料或最短时间准确发射到预定轨道一类的控制问题。
上面所说的火箭最少燃料或最短时间问题可以归结为最速下降问题,这个问题不仅是一个典型的线性系统理论问题,同时也是一个最优控制(现代控制理论另外一个很重要的分支)问题。
1969年,美国阿波罗11号载人登月,就是最速下降问题实际应用的一个成功范例,下面我将对最速下降问题进行简单介绍。