SGA及参数文件
SGA911调浆桶使用说明书

SGA911高温高压调浆桶使用说明书盐城华特纺织机械制造有限公司一、产品用途本机系在密闭容器中,用饱和水蒸气来调煮、溶解淀粉、化学浆或其混合浆,调煮成的浆液由桶内蒸气压力送到供应桶或浆槽,以供浆纱之用。
二、主要规格和参数1、型式:立式封闭型2、容积:全容积1立方米,工作容积0.8立方米。
3、最高工作压力:0.2mpa4、高最工作温度:132℃5、搅拌速度:高速960r/min,低速25 r/min6、加热方式:蒸气喷射式7、煮浆量:800-1200L/H8、输浆压力:0.05-0.1mpa9、装机功率:①高速 5.5KW②低速 1.1KW10、管口公称通径①进气:DN25mm②进水:DN 25mm③进出浆:DN 50mm④放空:DN 25mm⑤加料口:400*300(mm)11、安全装置①A41H-1.6C型DN DN25安全阀0.22Mpa自动开启。
②减压阀(用户自备)。
12、机器质量:1250Kg13、外型尺寸:L*B*H(mm):1250*1400*3000三、主要结构本机由桶体、搅拌部件、传动装置、管路、输浆机构及控制系统和各部分执行元件、仪表等组成。
1、桶体是直径1000的立式压力容器,材料采用1Cr18Ni9Ti不锈钢板,封头壁厚5 mm,筒节壁厚4 mm,上、下封头与筒节焊接一体。
2、搅拌器部件,由高速搅拌器和低速搅拌器组成。
①高速搅拌器由三只¢250 mm带有导流筒的推进式叶轮组成,转速960 r/min。
②低速搅拌器系在导流筒外套两片平行刮板组成,转速25 r/min③当高、低速搅拌器同时旋转时,推进式搅拌器的旋转使浆液从中间压向桶底,然后沿桶壁向上翻,回到导流筒中,再压向桶底,低速搅拌器的旋转,使浆液圆周动作,在两种搅拌器同时作用下,使浆液激烈翻滚,达到快速溶解的目的。
3、传动机构①高速传动装置由5.5千瓦电动机经联轴器直接驱动高速轴,传动比1:1,转速960r/min。
oracle 12c 参数
oracle 12c 参数Oracle 12c参数Oracle是一款非常强大的数据库管理软件,可以为企业提供高效稳定的数据管理支持。
Oracle数据库的运行需要众多参数的配合,针对每个参数的设置可以使得Oracle 的运行更加稳定、高效。
在Oracle 12c中,有大量的数据库参数需要进行设置,本文将介绍一些关键的参数设置方法。
1、SGA参数设置SGA是Oracle中非常重要的内存区域,被用于缓存数据和元数据,减少磁盘I/O。
通过调整SGA大小可以实现提高访问性能的目的。
可以使用下面的命令来查询SGA参数的值:SQL> show parameter sga可以通过编辑初始化文件ORACLE_HOME/dbs/initoradb.ora或使用ALTER SYSTEM语句在SGA参数或组件级别上设置SGA参数。
设置SGA最重要的是备份与恢复,为此可以将SGA的大小保存在PFILE 或SPFILE中,以便在备份与还原过程中使用。
SGA参数的设置包括:shared_pool_size:由SQL语句共享池的大小决定。
在高流量情况下,共享池的尺寸应适当增加以提高查询的效率。
db_cache_size:用于缓存数据块和索引块的缓冲池大小。
它决定了数据块的内存使用量。
large_pool_size:在执行如连接服务器,排序操作等任务时,处理多个连接的顶层堆栈使用的内存。
java_pool_size:用于Java等对象的内存池大小。
2、PGA参数设置Oracle数据库中的PGA(Process Global Area)是实现Oracle“进程内内存”概念的关键,它由每个进程的私有内存组成。
PGA存储了一个进程的全局变量信息,设计合理的PGA大小,可以使得Oracle各个进程的访问效率更高。
可以使用下面的命令来查询PGA参数的值:SQL> show parameter pga可以通过编辑初始化文件ORACLE_HOME/dbs/initoradb.ora或者使用ALTER SESSION 语句在针对性的设置PGA参数。
oracle_sga内存详解

四:有多少并发连接
五:应用是OLTP类型还是OLAP类型
根据这几个问题的答案,我们可以粗略地为系统估计一下内存设置。那我们现在来逐个问题地讨论,首先物理内存多大是最容易回答的一个问题,然后操作系统估计使用多少内存呢?从经验上看,不会太多,通常应该在200M以内(不包含大量进程PCB)。
sort_area_size integer 65536
SQL>
在这部分内存中我们最关注的通常是sort_area_size,这是当查询需要排序的时候,数据库会话将使用这部分内存进行排序,当内存大小不足的时候,使用临时表空间进行磁盘排序。由于磁盘排序效率和内存排序效率相差好几个数量级,所以这个参数的设置很重要。这四个参数都是针对会话进行设置的,是单个会话使用的内存的大小,而不是整个数据库使用的。偶尔会看见有人误解了这个参数以为是整个数据库使用的大小,这是极其严重的错误。假如设置了MTS,则UGA被分配在large_pool_size,也就是说放在了共享内存里面,不同进程(线程)之间可以共享这部分内存。在这个基础上,我们假设数据库存在并发执行server process为100个,根据上面我们4个参数在oracle8.1.7下的默认值,我们来计算独立模式下PGA的大致大小。由于会话并不会经常使用create_bitmap_area_size、bitmap_merge_area_size,所以我们通常不对四个参数求和。在考虑到除这四个参数外会话所保存的变量、堆栈等信息,我们估计为2M,则100个进程最大可能使用200M的PGA。
Large_pool_size
对于大缓冲池的设置,假如不使用MTS,建议在20—30M 足够了。这部分主要用来保存并行查询时候的一些信息,还有就是RMAN在备份的时候可能会使用到。如果设置了MTS,则由于UGA部分要移入这里,则需要具体根据server process数量和相关会话内存参数的设置来综合考虑这部分大小的设置。
belimo SGA24 技术数据表说明书

••••运行方式应用简单切换定位器适合和调节型风阀执行器 LM..A-SR 、NM..A-SR 、SM..A-SR 和 GM..A-SR 一起使用• 用于墙面安装技术参数电气参数额定电压AC/DC 24 V 额定频率50/60 Hz额定电压范围AC 19.2...28.8 V / DC 19.2...28.8 V 运行功耗0.3 W 变压器容量 1 VA输出功率说明用于最多10台执行器连接方式接线端子 1.5 mm²功能参数运行范围 Y 注释可选运行范围 10 V 或 2...10 V比值0...100% (旋转角度可以用旋钮机械限制)安全参数防触电保护等级IEC/EN III ,安全特低电压 (SELV)电气防护等级IEC/EN IP40防护等级注释IP54带电缆戈兰头EMC CE 遵循 2014/30/EU 运行方式类型 1.B 环境温度-20...50°C 存储温度-40...80°C 湿度测试根据 EN60730-1维护免维护重量重量0.80 kg安全注意事项该设备不得用于指定范围以外的应用, 特别是在飞机及其他同类的航空运输设备应用。
仅有授权的专业人员可以安装该设备,并需在安装过程中遵循相适应的法律法规及其他安装规章制度。
本设备只得在制造商工厂被打开。
本设备不具有任何用户可以自行更换或维修的部件。
此设备含有电子元件,不得作为普通家庭垃圾处理,必须按照所在地的相关法令法规处理。
产品特点通过接线端子 1 和 2 为定位器提供运行电压。
成比例。
与旋钮的位置成比例,产生了2 ... 10V 或0.5 ... 10V 的定位型号 Y ,或者执行器在0 ... 100%的范围(最小...最大)内发生位置变化。
调节旋钮的旋转角度可能会受到机械限制的约束。
定位器用于调节型执行器的远程控制或作为一个最小定位器使用 (为调节型控制器信号输出提供一个底限) 控制范围为执行器旋转角度的0 ... 100%。
(去石机)SGA10`15B-C说明书
1
SGA10B
二. 外形尺寸
SGA 使用说明书
单位:mm
图 2-1
2
SGA15B
SGA 使用说明书
图 2-2
3
三. 主要结构
SGA 使用说明书
图 4-1
图 3-1
4
SGA 使用说明书
1. 振动体由四个橡胶弹簧支持振动 2. 喂料门的上方在米厂进行溜槽配管,下方连接软管。 3. 喂料门下部装有可变的气流调节板。喂料门上有一个透明检查窗口,可以观
根据比重差分层,分离。 4. 灰尘以及轻的杂物,随着风进入布袋除尘器。 5. 在上下筛网被选出的含有石子的混合物,落入 2 次选别部。 6. 石头和其它重杂依靠二次分级筛面去除,二次筛面分离出的谷物重新进入喂
料门。 7. 选别状态可以通过上盖板的检查窗或二次分选部分出石口的状态来调整 3 个
空气调节门。 8. 卸料口包括四个净料卸料口和一个出石口。
吸风量 稻谷、糙米
(m3/min)
小麦
静压力(kpa)
重量 (kg)
垂直动重(kgf)
外形尺寸(mm)
120~140 120~140
-0.7 750 1880 1814 2074 1946
180~210 180~210
-0.7 800 2550 2440 2074 2179
※ 技术参数改变恕不另行通知。 ※ 上述尺寸包括带有二次选石系统的机器。 ※ 在用来进行大米去石时,大米的温度应在正常范围内。
面的上部末端。 10. 筛网能从原料投入侧抽出,机器前面必须要有 1500mm 的间距。
5
四. 工作原理
SGA 使用说明书
1. 从进料口投入的谷物,一边在金属板上平铺开一边传送,落入下方。 2. 落下的谷物,被分散槽分为 2 部分,分别供给上下段的筛网。 3. 谷物,被筛网上均匀分散开,在筛网的振动动作和上升空气的作用下,
SGA_MAX_SIZE与SGA_TARGET

Oracle的SGA 包括以下几个部分,可以通过show sga 命令或者是通过查看v$sga 视图来查看SGA 的大概组成:17:39:48 SQL> show sgaTotal System Global Area 1048576000 bytesFixed Size 1223392 bytesVariable Size 847250720 bytesDatabase Buffers 192937984 bytesRedo Buffers 7163904 bytes17:42:05 SQL> select * from v$sga;NAME VALUE------------------------------ -------------Fixed Size 1223392.00Variable Size 847250720.00Database Buffers 192937984.00Redo Buffers 7163904.00从上面可以大致的看到sga 包括一个固定区,一个可变区,一个数据库缓存和一个redo 缓存。
这些是比较笼统的信息,具体的SGA 是由以下几个部分组成的:- 数据缓冲(Buffer Cache )- 共享池(Shared Pool )- 大池(Large Pool )- Java池(Java Pool )- 流池(Streams Pool --- 10g 以后才有)- 重做日志缓冲(Redo Log Buffer )- 其他buffer caches (如KEEP, RECYCLE, and other block sizes cache 等)- Fixed SGA and other internal allocations。
其中,Shared Pool 、Java Pool 、Large Pool 和Streams Pool 这几块内存区的大小是相应系统参数设置而改变的,所以有通称为可变SGA (Variable SGA )。
使用lock_sga和pre_page_sga参数保证SGA常驻物理内存

Linux-x86_64 Error: 12: Cannot allocate memory
“小坎坷”出现了,想一想,这里为什么会启动失败呢?
原因很简单,Linux操作系统对每一个任务在物理内存中能够锁住的最大值做了限制!需要手工进行调整。
data seg size (kbytes, -d) unlimited
scheduling priority (-e) 0
file size (blocks, -f) unlimited
pending signals (-i) 266239
Property Description
Parameter type Boolean
Default value false
Modifiable No
Range of values true | false
Basic No
LOCK_SGAlocks the entire SGA into physical memory. It is usually advisable to lock the SGA into real (physical) memory, especially if the use of virtual memory would include storing some of the SGA using disk space. This parameter is ignored on platforms that do not support it.
3.使用“scope=spfile”选项修改之,成功。
sys@ora10g> alter system set lock_sga=true scope=spfile;
oracle sga详解
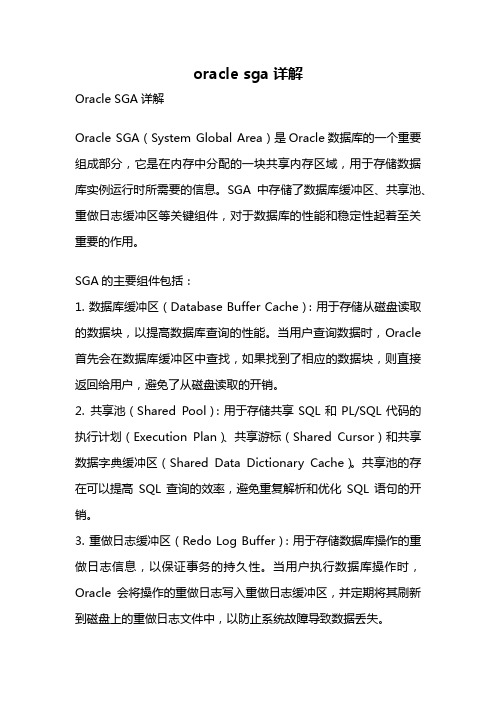
oracle sga详解Oracle SGA详解Oracle SGA(System Global Area)是Oracle数据库的一个重要组成部分,它是在内存中分配的一块共享内存区域,用于存储数据库实例运行时所需要的信息。
SGA中存储了数据库缓冲区、共享池、重做日志缓冲区等关键组件,对于数据库的性能和稳定性起着至关重要的作用。
SGA的主要组件包括:1. 数据库缓冲区(Database Buffer Cache):用于存储从磁盘读取的数据块,以提高数据库查询的性能。
当用户查询数据时,Oracle 首先会在数据库缓冲区中查找,如果找到了相应的数据块,则直接返回给用户,避免了从磁盘读取的开销。
2. 共享池(Shared Pool):用于存储共享SQL和PL/SQL代码的执行计划(Execution Plan)、共享游标(Shared Cursor)和共享数据字典缓冲区(Shared Data Dictionary Cache)。
共享池的存在可以提高SQL查询的效率,避免重复解析和优化SQL语句的开销。
3. 重做日志缓冲区(Redo Log Buffer):用于存储数据库操作的重做日志信息,以保证事务的持久性。
当用户执行数据库操作时,Oracle会将操作的重做日志写入重做日志缓冲区,并定期将其刷新到磁盘上的重做日志文件中,以防止系统故障导致数据丢失。
4. Java池(Java Pool):用于存储运行在Oracle数据库中的Java 代码的执行结果、Java类和Java对象。
Java池的存在可以提高Java代码的执行效率,避免重复编译和加载Java代码的开销。
5. Large Pool:用于存储较大的内存分配请求,如排序操作和并行查询等。
Large Pool的存在可以提高这些特殊操作的性能,避免占用太多的SGA空间。
6. 其他组件:还包括Java大对象池(Java Large Object Pool)、固定区(Fixed Area)等,不同版本的Oracle数据库中可能会有所不同。
oracle10g_参数调整(processes和sga)

------------------------------------ ----------- ------------------------------
lock_sga boolean FALSE
db_writer_processes integer 1
gcs_server_processes integer 0
job_queue_processes integer 10
SQL> alter system set sga_target = 700m;
SQL> commit;
Commit complete
完成所有操作后,完成对oracle数据库sga的调整
NAME TYPE VALUE
------------------------------------ ----------- ------------------------------
aq_tm_processes integer 0
sga_max_size big integer 164M
sga_target big integer 0
SQL> show parameter statistics_level;
NAME TYPE VALUE
查看你这一行数据
processes integer 500
即表明数据库的连接数被成功修改为500
2.调整oracle数据库的sga(相关参数的设置与服务器的物理内存有关,下面参数适用内存为2G的服务器,如果内存为其他值的请与开发这边联系,确定具体的参数值)
1.oracle连接数调整
oracle连接数默认为150,通过一下设置把oracle的连接数调整到500
oracle 11g sga pga的设置原则 和方法

oracle 11g sga pga的设置原则和方法Oracle 11g中SGA(System Global Area)和PGA(Program Global Area)的设置原则和方法如下:1. SGA的设置原则:- 根据系统的内存大小和应用的需求,确定SGA的大小。
SGA主要包括Buffer Cache、Shared Pool、Large Pool、Java Pool等组件,需要根据数据库的访问模式和数据量大小来进行调整。
- 尽量使用自动内存管理(Automatic Memory Management,AMM)来管理SGA的大小和组件分配,这样可以更加灵活地管理内存资源。
2. SGA的设置方法:- 手动设置SGA大小:可以通过修改初始化参数文件(initSID.ora)的SGA相关参数来手动设置SGA的大小,如SGA_TARGET、SGA_MAX_SIZE等。
需要重启数据库以使设置生效。
- 使用AMM:在使用AMM的情况下,只需要设置SGA_TARGET参数为所需的SGA大小,Oracle会自动根据系统的内存大小和负载情况进行动态调整。
3. PGA的设置原则:- 根据应用的并发性和查询的复杂度,以及数据库服务器的硬件资源(CPU、内存)等因素来确定PGA的大小。
- PGA主要包括Sort Area、Hash Area、Bitmap Merge Area等组件,需要根据查询的需求和并发性来决定这些组件的大小。
4. PGA的设置方法:- 使用PGA_AGGREGATE_TARGET参数:PGA_AGGREGATE_TARGET参数用于指定PGA的目标大小,Oracle会根据这个目标值和实际的应用需求来动态分配PGA的大小。
- 手动设置PGA大小:可以通过设置PGA相关的初始化参数(如SORT_AREA_SIZE、HASH_AREA_SIZE等)来手动控制PGA的大小,需要重启数据库以使设置生效。
三国群英传3setting各文件说明
三国群英传3setting各文件说明【原创版】目录1.文本概述2.三国群英传 3 中的文件类型3.各种文件的作用和说明4.总结正文【1.文本概述】本文将为您详细介绍《三国群英传 3》游戏中的各种文件及其作用。
在游戏设置中,文件是游戏运行过程中不可或缺的元素,它们负责游戏的各种参数和设置。
了解这些文件的用途和内容,可以帮助玩家更好地调整游戏,提升游戏体验。
【2.三国群英传 3 中的文件类型】在《三国群英传 3》中,有多种类型的文件,主要包括以下几种:1..sga 文件:游戏存档文件,记录玩家的游戏进度、角色信息、建筑和科技等设置。
2..tga 文件:游戏贴图文件,包含了游戏中的角色、场景、道具等图片资源。
3..wav 文件:游戏音频文件,负责游戏的背景音乐、音效等声音设置。
4..txt 文件:游戏文本文件,包括游戏的剧情、对话、任务等内容。
5..ini 文件:游戏配置文件,记录游戏的各种参数设置,如分辨率、画质等。
【3.各种文件的作用和说明】接下来,我们将详细了解这些文件的作用和内容:1..sga 文件:这是游戏最重要的文件之一,记录了玩家的所有游戏数据。
玩家在游戏中所做的一切,如完成任务、升级建筑、培养角色等,都会被记录在这个文件中。
当玩家下次进入游戏时,游戏会读取这个文件,恢复玩家的游戏进度。
2..tga 文件:游戏中的贴图文件,包含了各种各样的图片资源,如角色的头像、地图上的地形、建筑的外观等。
这些图片资源为游戏营造了丰富的视觉效果,让玩家在游戏中体验到更加生动的世界。
3..wav 文件:游戏音频文件,为游戏提供了声音效果。
在游戏中,玩家可以听到激昂的战斗音乐、角色的对话声音、各种音效等。
这些声音元素为游戏增色不少,让玩家在游戏中感受到更加真实的氛围。
4..txt 文件:游戏文本文件,包含了游戏中的各种剧情、对话、任务等内容。
玩家在游戏中进行任务时,会触发各种剧情和对话,这些内容都记录在文本文件中。
SGA区结构及性能总结

SGA区结构及性能总结1概述1.1通过对SGA内各项参数查看可以方便地了解数据库服务器资源分配情况,正确设确SGA内的各项参数可以提高数据库服务器的性能。
1.2SGA(System Global Area)系统全局区。
当Oracle数据库启动时,在内存中分配了一大片空间,这片空间叫系统全局区。
1.3系统全局区的查看方式:用internal登录sqlplus执行show sga,1.4显示如下Total System Global Area 774385824 bytesFixed Size 73888 bytesV ariable Size 757362688 bytesDatabase Buffers 16777216 bytesRedo Buffers 172032 bytes2各部分解释2.1Total System Global Area:SGA总内存数。
理论上SGA可占OS系统物理内存的1/2——1/3,我们可以根据需求调整。
有如下公式SGA=((db_block_buffers * block size)+(shared_pool_size+large_pool_size+java_pool_siz e+log_buffers)+1MB2.2Fixed Size:SGA中固定组件(它在编译oracle 数据库本身时就固定于其中)的大小。
它是固定大小的内存,用来指向SGA的其它部分。
SGA这一部分的大小是不能改变的。
2.3V ariable Size:指分配给SGA的可变内存。
V ariable Size分为shared pool(共享池)、large pool(大池)、java pool(JA V A池)和其他结构。
2.3.1Shared Pool 用于缓存最近被执行的SQL语句和最近被使用的数据定义。
它主要由两个内存结构构成Library cache 与Data dictionary cache 。
(去石机)SGA10`15B-C说明书
一. 技术参数
SGA 使用说明书
型号 稻谷(t/h)
SGA10B-C 7
SGA15B-C 10
产量
糙米(t/h)
小麦(比重机用)
小麦(去石机用)
10 7~13
15 13~18
动力要求
振动电机 1 0.3 kw 振动电机 1 0.3 kw 振动电机 2 0.3 kw 振动电机 2 0.3 kw 风机电机 0.75 kw 风机电机 0.75 kw
15. 安全装置必须经常处在正常的工作状态,而不能移开,失效或不动作。若在 此种不良状态下工作,佐竹公司恕不付任何责任。
16. 进一步的防护规则,我们将在使用说明书中的安全防护部分作特别的说明。
以上说明仅供参考
由于规范的不断更新,本说明书印刷以后,有一些特别细节可能会改变,请 与佐竹公司进行核对。
目录
8
2. 安装地脚孔 SGA10-B
SGA 使用说明书
SGA15-B
单位:mm
图 5-3
3. 安装顺序 (1) 移动安装机器需用四个吊环螺栓。 (2) 去掉运输撑板 A 和 B。(图 5-2) (3) 确保机器水平放置。 (4) 固定机器在座架上(或地面上)。 (5) 在喂料门和卸料门安装风管,溜管。 (6) 在适当的地方安装石子收集箱。 (7) 接线时,必须要使机器接地。 (8) 检查是否有工具或杂物留存在机器中。 (9) 接入电源,确认各个马达的运转方向。 (10) 拧紧固定电机的螺栓所需的力矩为 170N•m(17kgf•m)。 (11) 再次确认机器安装是否水平。
面的上部末端。 10. 筛网能从原料投入侧抽出,机器前面必须要有 1500mm 的间距。
5
四. 工作原理
SGA 使用说明书
oracle之sga介绍

oracle之sga介绍SGA即系统全局区域,是⼀组共享的内存结构,包含⼀个数据库实例的相关数据和控制信息,在实例启动时⾃动分配关闭是⾃动回收。
从10G开始,oracle提供了SGA的⾃动管理(AUTOMATIC SHARED MEMORY MANAGEMENT ,ASSM)新特性。
就是不需要⼿动设置shared pool ,buffer cacher等,只设置⼀个总的sga⼤⼩即可。
oracle⾃动调整⼤⼩。
show parameter sga_target 查询的value 为0即表⽰ASSM管理的⽅式,安装11G是默认开启⾃动管理的。
ASSM的启⽤:启⽤ASSM需要将statistics_level设置成typical或all,该参数的级别有三个:1、basic:收集基本的统计信息2、typical:收集⼤部分的统计信息,数据库默认设置3、all:收集全部统计信息alter system set statistics_level=all;或者 alter session set statistics_level=all;在启⽤ASSM后,如⼿动指定某⼀组值,则该值为该组件的最⼩值。
例如⼿动设置了sga_target=8G,shared_pool_size=1g,则在assm⾃动调整sga时,保证shared pool的最⼩值为1g。
关于sga_max_size指定内存中可以分配给sga的最⼤值,不允许动态调整,是⼀个固定值;sga_target是⼀个动态参数,其最⼤值为sga_max_size。
SGA包含的组件:共享池(shared pool);数据库缓冲区⾼速缓存(database buffer cache);⽇志缓冲区(redo buffer cache);⼤池;Java池;流池等。
SGA相关视图:v$sga:V$SGA这个视图包括了SGA的的总体情况,只包含两个字段:name(SGA内存区名字)和value(内存区的值,单位为字节)。
如何在自动SGA管理模式下调节参数设置解读

如何在自动SGA管理模式下调节参数设置我们知道,在Oracle10g自动SGA管理模式下,SGA的相关参数不受手动控制。
可是有些时候我们需要调整一下参数,如db_keep_cache_size,可能会遇到内存不足的错误:SQL> alter system set db_keep_cache_size=3584M scope=both sid='*';alter system set db_keep_cache_size=3584M scope=both sid='*'*ERROR at line 1:ORA-02097: parameter cannot be modified because specified value is invalidORA-00384: Insufficient memory to grow cache在自动模式下,内存设置由双下划线参数控制,如__db_cache_size:SQL> SELECT x.ksppinm NAME, y.ksppstvl VALUE, x.ksppdesc describ2 FROM SYS.x$ksppi x, SYS.x$ksppcv y3 WHERE x.indx = y.indx AND x.ksppinm LIKE '%&par%'4 /Enter value for par: db_cache_sizeold 3: WHERE x.indx = y.indx AND x.ksppinm LIKE '%&par%'new 3: WHERE x.indx = y.indx AND x.ksppinm LIKE '%db_cache_size%'NAME VALUEDESCRIB------------------------------ -------------------- ------------------------------------------------------------__db_cache_size 482344960Actual size of DEFAULT buffer pool for standard block sizebuffersdb_cache_size 0Size of DEFAULT buffer pool for standard block size buffers注意当前的SGA_TARGET和SGA_MAX_SIZE的设置:SQL> show parameter sgaNAME TYP E VALUE------------------------------------ ----------- ------------------------------lock_sga boolean FALSEpre_page_sga boolean FALSEsga_max_size big integer 680Msga_target big integer 680M我们可以先调节sga_target参数:SQL> alter system set sga_target=400M;System altered.SQL> select * from v$sgainfo;NAME BYTES RES------------------------------ ---------- ---Fixed SGA Size 1263848 NoRedo Buffers 7122944 NoBuffer Cache Size 205520896 YesShared Pool Size 197132288 YesLarge Pool Size 4194304 YesJava Pool Size 4194304 YesStreams Pool Size 0 YesGranule Size 4194304 NoMaximum SGA Size 713031680 NoStartup overhead in Shared Pool 41943040 NoFree SGA Memory Available 29360128011 rows selected.如果内存空闲,可以调节,那么可以看到参数的变化:SQL> SELECT x.ksppinm NAME, y.ksppstvl VALUE, x.ksppdesc describ2 FROM SYS.x$ksppi x, SYS.x$ksppcv y3 WHERE x.indx = y.indx AND x.ksppinm LIKE '%&par%'4 /Enter value for par: db_cache_sizeold 3: WHERE x.indx = y.indx AND x.ksppinm LIKE '%&par%'new 3: WHERE x.indx = y.indx AND x.ksppinm LIKE '%db_cache_size%'NAME VALUEDESCRIB------------------------------ -------------------- ------------------------------------------------------------__db_cache_size 188743680Actual size of DEFAULT buffer pool for standard block sizebuffersdb_cache_size 0Size of DEFAULT buffer pool for standard block size buffers再调高sga_target:SQL> alter system set sga_target=600M;System altered.SQL> SELECT x.ksppinm NAME, y.ksppstvl VALUE, x.ksppdesc describ2 FROM SYS.x$ksppi x, SYS.x$ksppcv y3 WHERE x.indx = y.indx AND x.ksppinm LIKE '%&par%'4 /Enter value for par: db_cacheold 3: WHERE x.indx = y.indx AND x.ksppinm LIKE '%&par%'new 3: WHERE x.indx = y.indx AND x.ksppinm LIKE '%db_cache%'NAME VALUEDESCRIB------------------------------ -------------------- ------------------------------------------------------------__db_cache_size 398458880Actual size of DEFAULT buffer pool for standard block sizebuffersdb_cache_size 0Size of DEFAULT buffer pool for standard block size buffers_db_cache_pre_warm TRUEBuffer Cache Pre-Warm Enabled : hidden parameter_db_cache_crx_check FALSEcheck for costly crx examination functions_db_cache_process_cr_pin_maxmaximum number of cr pins a process may havedb_cache_advice ONBuffer cache sizing advisory_db_cache_advice_sample_factor4 cache advisory sampling factor_db_cache_advice_batch_size 128cache advisory simulation batch size8 rows selected.观察SGA组件的变化:SQL> select * from v$sgainfo;NAME BYTES RES------------------------------ ---------- ---Fixed SGA Size 1263848 NoRedo Buffers 7122944 NoBuffer Cache Size 415236096 YesShared Pool Size 197132288 YesLarge Pool Size 4194304 YesJava Pool Size 4194304 Yes Streams Pool Size 0 Yes Granule Size 4194304 No Maximum SGA Size 713031680 NoStartup overhead in Shared Pool 41943040 NoFree SGA Memory Available 8388608011 rows selected.现在增加db_keep_cache_size,数据库会自动调整,去减少db_cache_size的内存分配:SQL> show parameter keepNAME TYP E VALUE------------------------------------ ----------- ------------------------------buffer_pool_keep stringcontrol_file_record_keep_time integer 7db_keep_cache_size big integer 16M SQL> alter system set db_keep_cache_size=200M;System altered.SQL> alter system set db_keep_cache_size=300M;System altered.SQL> show parameter sgaNAME TYP E VALUE------------------------------------ ----------- ------------------------------lock_sga boolean FALSEpre_page_sga boolean FALSEsga_max_size big integer 680Msga_target big integer 600MSQL> SET linesize 120SQL> COL name for a30SQL> COL value for a20SQL> COL describ for a60SQL> SELECT x.ksppinm NAME, y.ksppstvl VALUE, x.ksppdesc describ2 FROM SYS.x$ksppi x, SYS.x$ksppcv y3 WHERE x.indx = y.indx AND x.ksppinm LIKE '%&par%'4 /Enter value for par: db_cache_sizeold 3: WHERE x.indx = y.indx AND x.ksppinm LIKE '%&par%'new 3: WHERE x.indx = y.indx AND x.ksppinm LIKE '%cache_size%'NAME VALUEDESCRIB------------------------------ -------------------- ------------------------------------------------------------__db_cache_size 100663296Actual size of DEFAULT buffer pool for standard block sizebuffersdb_cache_size 0Size of DEFAULT buffer pool for standard block size buffers这种曲线调节,关键是释放了buffer cache的内存,这取决于系统的压力、buffer使用情况,在无人使用时较易成功。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SGASGA(System Global Area)是Oracle Instance的基本组成部分,在实例启动时分配。
是一组包含一个Oracle实例的数据和控制信息的共享内存结构。
主要是用于存储数据库信息的内存区,该信息为数据库进程所共享(PGA不能共享的)。
它包含Oracle 服务器的数据和控制信息,它是在Oracle服务器所驻留的计算机的实际内存中得以分配,如果实际内存不够再往虚拟内存中写。
SGA几个很重要的特性:1、SGA的构成——数据和控制信息,我们下面会详细介绍;2、SGA是共享的,即当有多个用户同时登录了这个实例,SGA中的信息可以被它们同时访问(当涉及到互斥的问题时,由latch和enquence 控制);3、一个SGA只服务于一个实例,也就是说,当一台机器上有多个实例运行时,每个实例都有一个自己的SGA尽管SGA来自于OS的共享内存区,但实例之间不能相互访问对方的SGA区。
它主要包括:1.数据库高速缓存(the database buffer cache),2.重演日志缓存(the redo log buffer)3.共享池(the shared pool)4.数据字典缓存(the data dictionary cache)以及其它各方面的信息。
1.数据高速缓冲区(Data Buffer Cache)在数据高速缓冲区中存放着Oracle系统最近使用过的数据块(即用户的高速缓冲区),当把数据写入数据库时,它以数据块为单位进行读写,当数据高速缓冲区填满时,则系统自动去掉一些不常被用访问的数据。
如果用户要查的数据不在数据高速缓冲区时,Oracle自动从磁盘中去读取。
数据高速缓冲区包括三个类型的区:1)脏的区(Dirty Buffers):包含有已经改变过并需要写回数据文件的数据块。
2)自由区(Free Buffers):没有包含任何数据并可以再写入的区,Oracle可以从数据文件读数据块该区。
3)保留区(Pinned Buffers):此区包含有正在处理的或者明确保留用作将来用的区。
2.Redo Log Buffer Cache缓存对于数据块的所有修改。
主要用于恢复其中的每一项修改记录都被称为redo 条目。
利用Redo条目的信息可以重做修改。
3. Shared Pool用于缓存最近被执行的SQL语句和最近被使用的数据定义。
它主要由两个内存结构构成:Library cache和Data dictionary cache修改共享池的大小:ALTER SYSTEM SET SHARED_POOL_SIZE = 64M;Libray Cache缓存最近被执行的SQL和PL/SQL的相关信息。
实现常用语句的共享,使用LRU算法进行管理,由以下两个结构构成:Shared SQL area、Shared PL/SQL area、Data Dictionary Cache、Data dictionary cache缓存最近被使用的数据库定义。
它包括关于数据库文件、表、索引、列、用户、权限以及其它数据库对象的信息。
在语法分析阶段,Server Process访问数据字典中的信息以解析对象名和对存取操作进行验证。
数据字典信息缓存在内存中有助于缩短响应时间。
4.数据字典缓存(the data dictionary cache)它包括的信息有:数据库文件,表,索引,列,用户,权限和其他数据对象,在解析间段,服务器进程查看数据字典来决定对象名称和有效的访问的信息,缓存数据字典信息来提高请求反应时间,大小是由共享池的大小来决定的。
oracle 的表空间是个什么东西?ORACLE物理上是由磁盘上的以下几种文件:数据文件和控制文件和LOGFILE构成的表空间就只谈相关的数据文件首先明确概念:表空间是ORACLE内部定义的一个概念,是为了统一ORACLE物理和逻辑上的结构而专门建立的,从物理上来说,一个表空间是由具体的一个或多个磁盘上数据文件构成的(至少1对1,可以1对多),从逻辑上来说一个表空间是由具体的一个或多个用户模式下的表,索引等等里面的数据所构成的. 因此从用户的角度来看是不应该看到磁盘上物理的数据文件的,其从小到大的视角是这样的关系:字段值--> 记录值--> 表数据--> 用户--> 表空间--> ORACLE而从一个ORACLE DBA的视角来看应是这样的关系:数据文件--> 表空间--> ORACLE综合一下,也就是说在ORACLE中表不可能单独存在,一定隶属于某一个用户,而某一用户的数据必定存在于某个表空间中.根据数据仓库概念的含义,数据仓库拥有以下四个特点:1、面向主题。
操作型数据库的数据组织面向事务处理任务,各个业务系统之间各自分离,而数据仓库中的数据是按照一定的主题域进行组织。
主题是一个抽象的概念,是指用户使用数据仓库进行决策时所关心的重点方面,一个主题通常与多个操作型信息系统相关。
2、集成的。
面向事务处理的操作型数据库通常与某些特定的应用相关,数据库之间相互独立,并且往往是异构的。
而数据仓库中的数据是在对原有分散的数据库数据抽取、清理的基础上经过系统加工、汇总和整理得到的,必须消除源数据中的不一致性,以保证数据仓库内的信息是关于整个企业的一致的全局信息。
3、相对稳定的。
操作型数据库中的数据通常实时更新,数据根据需要及时发生变化。
数据仓库的数据主要供企业决策分析之用,所涉及的数据操作主要是数据查询,一旦某个数据进入数据仓库以后,一般情况下将被长期保留,也就是数据仓库中一般有大量的查询操作,但修改和删除操作很少,通常只需要定期的加载、刷新。
4、反映历史变化。
操作型数据库主要关心当前某一个时间段内的数据,而数据仓库中的数据通常包含历史信息,系统记录了企业从过去某一时点(如开始应用数据仓库的时点)到目前的各个阶段的信息,通过这些信息,可以对企业的发展历程和未来趋势做出定量分析和预测。
企业数据仓库的建设,是以现有企业业务系统和大量业务数据的积累为基础。
数据仓库不是静态的概念,只有把信息及时交给需要这些信息的使用者,供他们做出改善其业务经营的决策,信息才能发挥作用,信息才有意义。
而把信息加以整理归纳和重组,并及时提供给相应的管理决策人员,是数据仓库的根本任务。
因此,从产业界的角度看,数据仓库建设是一个工程,是一个过程。
6.2.1 Pfile文件Pfile(Parameter File)文件是基于文本格式的参数文件,含有数据库的配置参数。
Oracle 9i在安装时为每个数据库建立了一个Pfile,默认的名称为“init+例程名.ora”,这是一个文本文件,可以用任何文本编辑工具打开。
表6.1 数据库的初始化参数文件分析内容说明# Copyright (c) 1991, 2001 by Oracle CorporationOracle公司版权标识# MTS 多线程服务器配置标识,在Oracle 9i里称为共享服务器配置dispatchers="(PROTOCOL=TCP)(SER=MODOSE)","(PROTOCOL=TCP)(PRE=oracle.aurora.server.GiopServer)", "(PROTOCOL=TCP)(PRE=oracle.aurora.server.SGiopServer)"多线程服务器配置# 其他配置其他参数compatible=9.0.0兼容版本9.0.0db_name=myoracle数据库名称为myoracle# 分布式, 复制和快照配置分布式、复制和快照参数db_domain=mynet数据库域名为mynet,加上数据库名称db_name构成全局数据库名称remote_login_passwordfile=EXCLUSIVE指定操作系统或口令文件是否具有检查用户口令的权限。
设置为EXCLUSIVE, 将使用数据库的口令文件对每个具有权限的用户进行验证。
# 排序, 散列联接, 位图索引配置排序、散列联接、位图索引参数sort_area_size=524288指定排序区使用的最大内存量为512KB。
排序完成后, 各行将返回, 并且内存将释放。
增大该值可以提高大型排序的效率。
# 文件配置文件配置参数control_files=("C:\oracle\oradata\myoracle\CONTROL01.CTL","C:\oracle\oradata\myoracle\CONTROL02.CTL", "C:\oracle\oradata\myoracle\CONTROL03.CTL")指定控制文件的路径及文件名#池内存配置参数Java_pool_size=33554432指定Java存储池的大小为32MB,用于存储 Java 的方法、类定义和Java对象。
large_pool_size=1048576指定大型池的大小为1MB,用于共享服务器的会话内存、并行执行的消息缓冲区以及RMAN备份和恢复的磁盘 I/O 缓冲区。
shared_pool_size=33554432指定共享池的大小为32MB,用于存储共享游标、存储的过程、控制结构和并行执行消息缓冲区等对象。
较大的值能改善多用户系统的性能# 游标和库高速缓存配置游标和高速缓存参数open_cursors=300指定一个会话一次可以打开的游标的最大数量为300,应将该值设置得足够高,这样才能防止应用程序耗尽打开的游标# 系统管理的撤消和回退段配置系统管理撤消和回滚段参数undo_management=AUTO指定系统使用的撤消空间管理方式为SMU 方式,在SMU方式下, 撤消空间会像撤消表空间一样在外部分配undo_tablespace=UNDOTBS指定回滚表空间为UNDOTBS# 网络注册配置网络注册参数instance_name=myoracle例程名称为myoracle# 诊断和统计配置诊断和统计参数background_dump_dest=C:\oracle\admin\myoracle\bdump后台进程跟踪文件目录core_dump_dest=C:\oracle\admin\myoracle\cdump核心转储跟踪文件目录timed_statistics=TRUE收集操作系统的计时信息,这些信息可被用来优化数据库和 SQL 语句user_dump_dest=C:\oracle\admin\myoracle\udump用户进程跟踪文件目录# 进程和会话配置进程和会话信息processes=150指定可同时连接到一个Oracle Server上的操作系统用户进程的最大数量为150# 重做日志和恢复重做日志和恢复参数设置Fast_start_mttr_target=300指定从单个数据库例程崩溃中恢复所需的时间为300秒# 高速缓存和 I/O配置高速缓存和I/O参数db_block_size=4096指定数据块大小为4KBdb_cache_size=33554432指定数据缓冲区为32MB,该值越大,可以减少对数据库文件的I/O次数,提高效率6.2.2 SPfile文件SPfile(Server Parameter File,服务器参数文件)是基于二进制格式的参数文件,含有数据库及例程的参数和数值,但不能用文本编辑工具打开。