MC多轴运动控制卡学习硬件
PMAC多轴运动控制卡学习(硬件)
目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC的含义和特点 (2)1.2 PMAC的分类及区别 (2)1.2.1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2.1 Turbo PMAC Clipper硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper控制器可选附件 (6)2.2.2.1 轴接口板 (6)2.2.2.2 反馈接口板 (7)2.2.2.3 数字I/O接口板 (7)第三章 Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3.2 控制卡供电 (7)3.2.1 数字电源供电 (7)3.2.2 DAC(数字/模拟转换)输出电路供电 (8)3.2.3 标志位供电 (8)3.3 限位及回零开关 (8)3.3.1 限位类型 (8)3.3.2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4.2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3.4.4 放大器使能信号(AENAn/DIRn) (10)3.4.5 放大器错误信号(FAULT-) (10)3.4.6 可选模拟量输入 (11)3.4.7 位置比较输出 (11)3.4.8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3.8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1.接口各针脚定义 (21)2. 电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
MC系列运动控制器

HollySys和利时集团地址:北京经济技术开发区地盛中路2号院邮编:100176 电话:010-5898 1588传真:010-5898 1558产品咨询热线:4008-111-999技术支持邮箱:PLC@主页:新浪微博:/hollysysplc和利时微信订阅号和利时新浪官方微博MC系列运动控制器HollySys宗旨用自动化改进人们的工作、生活和环境愿景通过稳定与持续的发展 创建最有价值的自动化公司工作方针不断创新、追求卓越、一次到位理念真诚地为用户设想发展战略集团化、产品化、国际化价值、团队、执行价值——为用户创造价值专业先进的方案 高性价比的产品 满意的增值服务 为员工创造价值自我实现的舞台 合理多样的报酬 和谐的工作氛围 为股东创造价值不断积累的实力 稳定增长的市值 良好的社会形象团队——敬业 自律 正直 学习 创新 成长 合作 开心 结果执行——战略清晰 操作标准 实现承诺企业文化关于和利时和利时集团始创于1993 年,是集研发、生产、销售、技术服务为一体的专业自动化公司。
现有员工3000 多人,年经营额超过30 亿元人民币。
被国际知名的美国ARC 咨询集团评为全球过程自动化50 强,是中国本土唯一入选的企业。
公司于2008 年在美国纳斯达克上市(HOLI)。
集团在北京、杭州、西安、新加坡等地设立基地,并在全国和世界各地设有服务机构60 余处。
集团在北京拥有建筑面积8 万平米的研发和生产基地,配备3 条电子装联生产线,专门用于生产最高安全等级(SIL4 级)的高铁产品,同时也生产核电仪控产品、DCS 和PLC 等产品;在杭州拥有建筑面积2.5 万平米的成套制造基地;在西安设有大型研究中心。
位于北京的可靠性试验中心,已获得德国TUV 莱茵认证,成为符合国际标准的可靠性试验基地,可以对电子产品按国际标准进行严格的电磁兼容、电气安全、温度、湿度、腐蚀、振动等项目进行试验。
集团的主要业务有工厂自动化、过程自动化、高速铁路自动化、核电站自动化。
基于ARM9_MCX314As的多轴嵌入式运动控制器设计
设备设计/诊断维修/再制造现代制造工程(Modern Manufacturing Engineering)2012年第6期基于ARM9+MCX314As的多轴嵌入式运动控制器设计*徐骥,汪地,林锋,杨浩,董锋,杨绍鹏(上海大学上海市机械自动化及机器人重点实验室,上海200072)摘要:阐述了基于ARM9微处理器S3C2410和专用运动控制芯片MCX314As的多轴嵌入式运动控制器设计方案。
详细介绍了运动控制器的硬件结构与主要功能,阐述了两片MCX314As实现多轴联动的方案,基于实时Linux系统建立了运动控制器的软件平台,设计了运动控制的函数库。
该运动控制器具有体积小、功耗低、成本低和精度高的优点。
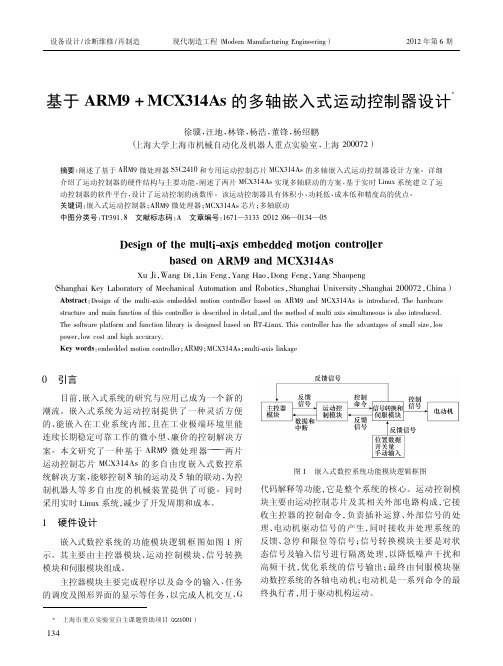
关键词:嵌入式运动控制器;ARM9微处理器;MCX314As芯片;多轴联动中图分类号:TP391.8文献标志码:A文章编号:1671—3133(2012)06—0134—05Design of the multi-axis embedded motion controllerbased on ARM9and MCX314AsXu Ji,Wang Di,Lin Feng,Yang Hao,Dong Feng,Yang Shaopeng(Shanghai Key Laboratory of Mechanical Automation and Robotics,Shanghai University,Shanghai200072,China)Abstract:Design of the multi-axis embedded motion controller based on ARM9and MCX314As is introduced.The hardware structure and main function of this controller is described in detail,and the method of multi axis simultaneous is also introduced.The software platform and function library is designed based on RT-Linux.This controller has the advantages of small size,low power,low cost and high accuracy.Key words:embedded motion controller;ARM9;MCX314As;multi-axis linkage0引言目前,嵌入式系统的研究与应用己成为一个新的潮流。
翠欧控制卡入门手册-MC206X-学习

目的 (2)原则 (2)内容 (2)1 用途 (2)1.1 应用领域 (2)1.2 应用实例 (3)2 运动控制系统构架 (3)2.1 组成 (3)2.2 各部分功能 (4)3 配线 (6)3.1 MC206X介绍 (6)3.2 供电 (9)3.3 控制器、驱动器配线 (9)3.4 孔制器、上位机连接 (12)4 软件编程 (12)4.1 支持软件使用 (12)4.2 简单运动指令举例 (27)4.3 简单运动控制程序举例 (34)目的通过阅读本手册,让刚刚接触TRIO运动控制器的客户可以从用途、系统构架、TRIO 在系统中的作用以及软、硬件有一个初步的了解。
其中最主要的是,通过本手册一定要让用户能够自己搭建一个简单的控制系统,能用Motion Perfet与控制器、电机连接起来,对电机进行一些简单的操作。
为用户未来使用TRIO运动控制器开发项目打下基础。
原则简单、实用、图文并茂。
内容1 用途1.1 应用领域TRIO运动控制器主要应用在工业控制领域,可以对伺服,步进,变频器等进行控制。
其特点是指令简单,完成复杂的多轴协调运动,只需几条简单的指令就可以完成。
1.2 应用实例2 运动控制系统构架2.1 组成2.1.1 运动控制系统概念运动控制是指在一定的环境中,根据给定的条件,将预定的控制方案、规划指令转变成期望的机械运动。
实现对被控目标机械部件精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些控制的综合控制。
当今的运动控制,由于环境条件的复杂,使得控制方案,数据也显得越来越复杂,这样,实际中要想完成预定的动作,实现准确的运动控制,更多的依靠大型的运动控制系统。
运动控制系统包括处理运动算法和信号的控制器、增强信号,可供应运动控制器提供运动输出的放大器、执行机构、反馈系统(传感器/变送器),可基于输出和输入的比较值,调节过程变量。
有的系统还包括操作员界面或主机终端前端处理设备。
2.1.2 运动控制系统框图2.2 各部分功能➢人机交互:一般由上位机或触摸屏完成人机交互功能。
Delta DVP-MC系列多轴运动控制器用户指南说明书
/DVP-1191470-01………………………………………………………………… ENGLISH …………………………………………………………………… Thank you for choosing Delta DVP-MC series motion controller. DVP-MCseries is a multi-axis motion controller based on CANopen fieldbus and can be applied in packaging machines, printing machines, taping machines, cutting machines, digital control lathes and automated storage systems.Please read this instruction sheet carefully using DVP10MC11T and follow the instructions to avoid damages on the product or injuries on staff.Switch off the power supply before wiring.This instruction sheet offers information on electrical specifications, functions, installation, wiring and trouble-shooting for DVP-MC series. For more details, see the operation manual for DVP10MC11T.DVP10MC11T is an OPEN TYPE device and therefore should be installed in an enclosure free of airborne dust, humidity, electric shock and vibration. The enclosure should prevent non-maintenance staff from operating the device (e.g. key or specific tools are required to open the enclosure) in case danger and damage on the device may occur.DVP-MC series is for controlling the machines or equipment in operation. To avoid damaging it, only qualified staff who knows it well is allowed to install, operate, wiring and maintain it.DO NOT connect the input AC power supply to any of the I/O terminals; otherwise series damages may occur. Check all the wirings again before switching on thepower.Product Profile & DimensionsUnit: mm [inch][Figure 1][Figure 2]○1Model name○11CANopen communication port○2POWER, RUN, ERR indicators○12Extension module fixing clip○3COM1, COM2 indicators○13I/O terminals○4CAN, MTL indicators○14Direct mounting hole○5RUN/STOP switch○15Right-side extension port○6Encoder interface○16COM2 port○7RESET button○1724V power supply port○8COM1 port○18Left-side extension port○9Ethernet port○19Nameplate○10DIN rail clipElectrical Specifications✹ Power SupplyPower supply voltage24 VDC (-15 to +20%) Power supply fuse 3 A/30 VDC, Polyswitch Insulation voltage 500 VDC (Secondary-PE) Power consumption 8 W Max.Shock/vibration immunity Standards: IEC61131-2, IEC 68-2-6 (TEST Fc)/IEC61131-2 & IEC 68-2-27 (TEST Ea)Noise immunity ESD (IEC 61131-2, IEC 61000-4-2): 8 kV Air DischargeEFT (IEC 61131-2, IEC 61000-4-4): Power Line: 2 kV, Digital I/O: 1 kV, Analog & Communication I/O: 1 kVDamped-Oscillatory Wave: Power Line: 1 kV, Digital I/O: 1 kVRS (IEC 61131-2, IEC 61000-4-3): 26 MHz ~ 1GHz, 10 V/mAmbiance Operation: 0 to 55°C (temperature), 50 to 95% (humidity), pollution degree 2Storage: -25 to 70°C (temperature), 5 to 95% (humidity)Weight Approx. 240g✹ I/O SpecificationsI/O channels 8 input channels, 4 output channelsI/O channel types 8 high-speed digital input channels, 4 high-speed digital output channelsI/O terminals Input terminals: I0, I1, I2, I3, I4, I5, I6, I7 Output terminals: Q0, Q1, Q2, Q3Common terminal for input points Wiring terminal S/S (for connecting to the positive or negative pole of the power supply)Input types Sink or SourceI/O delay time Input: 2.5 µs (OFF∙ON), 5 µs (ON∙OFF) Output: 2 µs (OFF∙ON), 3 µs (ON∙OFF)Input signal current 24 VDC, 5 mAMax. I/O cable length Shielded: 500m; Not shielded: 300m Power supply foroutput points24 VDC (-15 to +20%) #1Max. load Resistive load: 0.5 A/1 point (2A/ZP) Conductive load: 13 W (30 VDC) Light bulb load: 2.5 W (30 VDC)#1: UP and ZP must use external auxiliary 24 VDC power supply (-15 to 20%).COM Ports✹ COM1 (RS-232)DVP10MC11T offers one RS-232 port. See the table below for the PIN definitions.PIN Signal Definition1, 2 +5V 5V power supply (positive pole)3 GND Earth4 Rx Receivingdata5 Tx Sendingdata6 GND Earth7 NC Reserved8 GND Earth✹ COM2 (RS-485)DVP10MC11T offers one RS-485 port. See the table below for the PIN definitions.PIN SignalDefinition1 + Signal+2 _ Signal-3 SG--✹ CANopen Communication PortDVP10MC11T offers two RJ45 connectors as the interface for motion control. When establishing a network, use standard CAN cables for the CAN bus, e.g. Delta TAP-CB03 or TAP-CB04. You will need termination resistances at the two ends of the bus, e.g.Delta TAP-TR01.PINSignalDefinition 1 CAN_H Signal+ 2 CAN_L Signal- 3 CAN_GND 0 VDC 4 RESE_1 Reserved 5 RESE_2 Reserved 6 CAN_SHLD Shielded cable7 CAN_GND 0 VDC 8 RESE_3Reserved✹ Encoder InterfaceDVP10MC11T offers one 9-PIN D-SUB encoder interface. See the table bellows for theterminal definitions.TerminalSignalDefinition1 A+2 B+3 Z+6 A-7 B-8 Z- Incremental encoder4 +24VEXT5 GNDEXT 24V encoder9 +5VEXT+5V encoder✹ Ethernet PortDVP10MC11T offers one Ethernet port, supporting Modbus/TCP protocol. See the tablebelow for the terminal definitions.TerminalSignal Definition 1 Tx+ Sending data (positive) 2Tx-Sending data (negative)3 Rx+ Receiving data (positive)4 -- N/C5 --N/C6 Rx- Receiving data (negative)7 -- N/C8 --N/CInstallation & Wiring✹ InstallationInstall DVP10MC11T in an enclosure with sufficient space around it to allow heat dissipation. D > 50mm (See the figure).✹ Input Point WiringModeSimplified modelWiring loopSinkSource✹ Output Point WiringAll transistor outputs in DVP10MC11T include zener diode, which is sufficient enough for small-power conductive load and infrequent On/Off applications. However, in big-power or frequent On/Off occasions, follow the method below to connect to suppression circuit to reduce interferences and avoid the transistor output circuit from being damaged due to over-voltage or overheating.[Figure 3]◆ 24 VDC power supply Fuse♦ Emergency stop button ⌧ Load: Switch, conductive load⍓ 9V Zener diode, 5W (Use ⍓ and when in big-power and frequent On/Off occasions) Diode or equivalent components for suppression (Use only when in small-power loads)Connecting to DVP-S Series Extension ModulesLED Indicators & Trouble-Shooting✹ ERR LEDLED status Indication How to correct Off PLC in normal operation --Red light flashing Syntax errors in the PLCprogram; devices orcommands exceed theallowed rangeFind out the cause of error from register D1004 inthe PLC and the location of error from D1137. Fordetails, see “DVP-PLC Application Manual:Programming”.Red light quickly flashing Insufficient power supplyfor DVP10MC11TCheck if the power supply load for DVP10MC11Tis normal.✹ CAN LEDLED status Indication How to correctGreen light single flashing CANopen network inSTOP statusThe host controller is downloading the programand waiting for the download to be completed.Green light flashing CANopen network inpre-operational statusCheck if the CANopen network is connectedcorrectly.Check if the slave configured on the networkexists.Check if the slave is offline.Green light constantly on CANopen network inoperational status--Red light single flashing Bus error, exceeding thealarm levelCheck if the connecting cable for the CANopenbus is standard cable.Check if there are termination resistances atboth ends of the CANopen bus.Check if the interferences around the CANopenbus are too big.Red light constantly on Bus-offCheck if the cable connection in the CANopennetwork is correct.Check if the baudrate of DVP10MC11T isconsistent with its slaves.✹ MTL LEDLED status Indication How to correctOff DVP10MC11T is notconfigured with slaves.Configure slaves for DVP10MC11T in theCANopen Builder software and download theconfiguration.Green light on DVP10MC11T inoperational status;motion control programin executing status.--Green light flashing DVP10MC11T has notbeen connected with theslave.Check if the CANopen network is connectedcorrectly.Check if the slave configured on the networkexists.Red light constantly on Hardware error inDVP10MC11TSend DVP10MC11T back to factory for repair.Red light flashing DVP10MC11T isoperating in abnormalstatus.Check if the set synchronous scan period is tooshort.Check if there is slave offline from the CANopennetwork.Press the RESET button on DVP10MC11T(Re-enter STOP status after the program isexecuted.)Ethernet LEDLED LED status IndicationOn The baudrate for Ethernet communication is 100 Mbps.Orange lightOff The baudrate for Ethernet communication is 10 Mbps, or DVP10MC11T has not been connected to the Ethernet.Flashing The Ethernet port on DVP10MC11T is sending or receiving data.Green lightOff The Ethernet port on DVP10MC11T is not sending or receiving data.………………………………………………………………… 繁體中文 ………………………………………………………………………感謝您採用台達DVP-MC系列運動控制器。
MCX314As型四轴运动控制器的原理及应用
MCX314As型四轴运动控制器的原理及应用1 引言MCX系列运动控制器是日本NOVA公司设计的专用电路,其中MCX314As是NOVA公司最新的推出的4轴运动控制器,是对MCX314功能的改进和增强。
MCX314As以单个电路同时控制4个伺服系统或步进电机系统,可进行各轴独立的定位控制、速度控制,亦可在任意2轴或3轴中进行圆弧、直线、位模式插补。
MCX314As能与8/16位数据总线接口,通过命令、数据和状态等寄存器实现4轴3联动的位置、速度、加速度等的运动控制和实时监控、实现圆弧、直线、位模式3种模式的轨迹插补,输出脉冲频率达到4MHz,每轴都有伺服反馈输入端、4个输入点和8个输出点,能独立地设置为恒速、线性、非对称S曲线加/减控制、非对称梯形加/减速控制方式,并有2个32位的逻辑、实际位置计数器和状态比较寄存器,实现位置的闭环控制,另外,较MCX314增加了自动搜寻原位、输入信号滤波器、同步动作、输出脉冲32位,圆弧/直线插补脉冲范围32位、完成S曲线加/减速的非对称、手动设定模式、位置计算器的可变环形、Z相输入的实位计数器的清除、实位计算器的增减反转等功能,同时,MC X314As对连续插补最终写入、圆弧插补终点指定、输入UP/DOWN脉冲的计算出错等作了相应的改善。
2 内部结构和主要功能图1为MCX314As的功能框图。
由相同功能的X、Y、Z和U轴的控制部分和插补计数部分组成,主要功能如下:2.1 4轴控制MCX314As通过脉冲序列驱动控制电机运动,4轴运动控制器中的4个轴都具有相同的功能,允许至多3轴联动,同时对于恒速驱动、插补或S曲线驱动都有相同的操作方法,S曲线加/减速驱动等4轴的性能相同。
2.2 速度控制对于恒速驱动、插补或S曲线加/减速驱动,输出脉冲的频率范围是1p/s-4mp/s,而输出脉冲频率的精度(时钟频率为16MHz)小于±0.1%,速度倍率为1-500,驱动脉冲输出的速度可以在不运行时自由变化。
MC多轴运动控制卡学习硬件2
目录PMAC控制卡学习(硬件) (2)第一章PMAC简介 (2)1.1 PMAC的含义和特点 (2)1.2 PMAC的分类及区别 (2)1.2.1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2.1 Turbo PMAC Clipper硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper控制器可选附件 (6)2.2.2.1 轴接口板 (6)2.2.2.2 反馈接口板 (6)2.2.2.3 数字I/O接口板 (7)第三章Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3.2 控制卡供电 (7)3.2.1 数字电源供电 (7)3.2.2 DAC(数字/模拟转换)输出电路供电 (7)3.2.3 标志位供电 (8)3.3 限位及回零开关 (8)3.3.1 限位类型 (8)3.3.2 回零开关 (8)3.4电机信号连接 (8)3.4.1增量式编码器连接 (8)3.4.2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3.4.4 放大器使能信号(AENAn/DIRn) (10)3.4.5 放大器错误信号(FAULT-) (10)3.4.6 可选模拟量输入 (11)3.4.7 位置比较输出 (11)3.4.8 串行接口(JRS232) (11)3.5 设备连接示例 (11)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3.8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1.接口各针脚定义 (21)2. 电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
基于运动控制芯片MCX314As的多轴运动控制器的设计

基于运动控制芯片MCX314As的多轴运动控制器的设计
朱斯国;姜长泓;杨喜;黄艳秋
【期刊名称】《工业控制计算机》
【年(卷),期】2007(20)3
【摘要】以TMS320LF2407A和MCX314As运动控制芯片为核心硬件,自主研发了基于TMS320LF2407A和MCX314As的多轴运动控制器,该控制器能够实现4
轴位置、速度和S曲线的加减速控制,MCX314AS的所有功能都是通过特定的寄存器控制的,通过寄存器对4个运动轴进行参数化控制,实现任意3轴直线插补、任意两轴圆弧插补、任意3轴位元模式插补.
【总页数】2页(P67-68)
【作者】朱斯国;姜长泓;杨喜;黄艳秋
【作者单位】长春工业大学电气工程学院,吉林,长春,132000;长春工业大学电气工程学院,吉林,长春,132000;长春工业大学机电工程学院,吉林,长春,132000;长春工业大学电气工程学院,吉林,长春,132000
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于PC/104总线与专用运动控制芯片的多轴运动控制器设计 [J], 崔志方;皮佑国
2.基于CH365型接口和MCX314As型运动控制器的PCI总线运动控制卡设计 [J],
林剑豪;薛昭武
3.基于运动控制芯片MCX314的运动控制器设计 [J], 蔡晓雯;杨恢先;李正义;王子菡;戴秋芳
4.基于PC104总线与MCX314As芯片的运动控制器设计 [J], 梁伟林;皮佑国;梁佑彬
5.基于MCX314as的运动控制器设计 [J], 王立柱;罗焕佐
因版权原因,仅展示原文概要,查看原文内容请购买。
DMC5400运动控制卡 硬件手册V2.1
本手册版权归深圳市雷赛科技有限公司所有,未经雷赛公司书面 许可,任何人不得翻印、翻译和抄袭本手册中的任何内容。
涉及 DMC5400 控制卡软件的详尽资料以及每个函数的介绍和范例, 请参阅软件编程使用手册(随 DMC5400 卡赠送)。
本手册中的信息资料仅供参考。由于改进设计和功能等原因,雷 赛公司保留对本资料的最终解释权!内容如有更改,恕不另行通知!
z 两种脉冲输出类型:双脉冲或脉冲/方向 z 运动中可改变目标位置和速度
z 设置比较条件改变速度
z 四轴高速位置信息锁存输入
z 位置管理和软件限位开关功能
z 最多可达 16 进 16 出 I/O
z 连续插补功能
z 每轴编码器输入脉冲频率最大 4MHZ
z 两种编码器输入脉冲类型:A/B 相或双脉 z 同一计算机系统中最多可插 5 块卡
1.1 产品简介 .................................................. 1 1.2 产品特点 .................................................. 2 1.3 主要技术指标 .............................................. 2 1.4 应用领域 .................................................. 3 1.5 用户控制系统开发流程 ...................................... 4
手轮 PA、PB
1
技术支持热线:0755-26417593
网址:
图 1-1 系统框图
D M C 5 4 0 0 硬 件 手 册 Version 1.0
DMC2610软件手册v1_1

4.1 参数设置操作 .............................................................. 8 4.1.1 脉冲参数设置...........................................................8 4.1.2 回原点参数设置.........................................................9 4.1.3 计数参数设置..........................................................10 4.1.4 限位参数设置..........................................................11
第二章 软件安装 .................................................................................................................................. 2
2.1 安装 DMC2610 控制卡驱动程序 ................................................ 2 2.1.1 先安装驱动程序,后安装控制卡的安装方法 ................................. 2 2.1.2 先安装控制卡,后安装驱动程序的安装方法 ................................ 4
多轴运动控制卡课设
多轴运动控制卡课设多轴运动控制卡是一种用于控制多轴运动的电子设备,在工业自动化领域得到广泛应用。
本文将从多轴运动控制卡的基本原理、应用场景和设计过程等方面进行详细介绍。
一、多轴运动控制卡的基本原理多轴运动控制卡的主要功能是控制多个电机同时运动,从而实现复杂的运动轨迹。
在多轴运动控制卡中,通过一个高速的时钟信号来控制各个轴的运动,这个时钟信号被称为“步进脉冲”。
当接收到步进脉冲信号后,电机会按照一定的步距和速度进行运动。
多轴运动控制卡的核心部件是FPGA芯片。
FPGA是一种可编程逻辑器件,可以根据需要进行编程,实现多种功能。
在多轴运动控制卡中,FPGA芯片负责产生步进脉冲信号,并控制各个轴的运动。
此外,多轴运动控制卡还需要配合驱动器、电机、传感器等配件一起使用,以实现精密的运动控制。
二、多轴运动控制卡的应用场景多轴运动控制卡广泛应用于工业自动化、机器人、医疗设备、航天航空等领域。
以机器人为例,在制造过程中需要进行各种复杂的运动,如抓取、放置、旋转、倾斜等。
多轴运动控制卡可以实现机器人的多个轴同时运动,从而实现复杂的运动轨迹,提高生产效率。
在医疗设备领域,多轴运动控制卡可以控制医疗设备的精度和速度,从而确保手术的安全性和准确性。
同时,多轴运动控制卡还可以实现医疗设备的自动化操作,减少医护人员的工作强度。
三、多轴运动控制卡的设计过程多轴运动控制卡的设计过程包括硬件设计和软件设计两个方面。
硬件设计方面,需要根据实际需求选择FPGA芯片、驱动器、电机、传感器等配件,并进行电路设计和布局。
同时,还需要进行信号分析和干扰测量,确保系统的稳定性和可靠性。
软件设计方面,需要进行FPGA芯片的编程,实现步进脉冲信号的产生和轴的运动控制。
此外,还需要编写上位机软件,实现与多轴运动控制卡的通信和控制。
在设计过程中,需要考虑多轴运动控制卡的实时性、精度和稳定性。
同时,还需要根据实际需求进行性能测试和优化,确保系统的性能达到预期目标。
PMAC多轴运动控制卡学习硬件.doc
实用标准文案目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC 的含义和特点 (2)1.2 PMAC 的分类及区别 (2)1.2.1 PMAC 的分类 (2)1.2.2 PMAC 1 型卡与 2 型卡的主要区别 (2)第二章 Turbo PMAC Clipper 控制器硬件配置 . (3)2.1 Turbo PMAC Clipper 控制器简介 (3)2.2 Turbo PMAC Clipper 硬件配置 (3)2.2.1 Turbo PMAC Clipper 硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper 控制器可选附件 (6)2.2.2.1 轴接口板. (6)2.2.2.2 反馈接口板 . (7)2.2.2.3 数字 I/O 接口板 . (7)第三章 Turbo PMAC Clipper 设备连接 (7)3.1 板卡安装 . (7)3.2 控制卡供电. (7)3.2.1 数字电源供电. (7)3.2.2 DAC (数字 / 模拟转换)输出电路供电 (8)3.2.3 标志位供电 . (8)3.3 限位及回零开关 . (8)3.3.1 限位类型 . (8)3.3.2 回零开关 . (8)3.4 电机信号连接 (9)3.4.1 增量式编码器连接 (9)3.4.2 DAC 输出信号 . (9)3.4.3 脉冲 &方向(步进)驱动 . (10)3.4.4 放大器使能信号 (AENAn/DIRn) . (10)3.4.5 放大器错误信号 (FAULT-) . (10)3.4.6 可选模拟量输入 . (11)3.4.7 位置比较输出. (11)3.4.8 串行接口 (JRS232) . (11)3.5 设备连接示例 . (12)3.6 接口及指示灯定义 . (13)3.7 跳线定义 . (15)3.8 Turbo PMAC Clipper 端口布置及控制结构图 (19)21 附件 .......................................................................1. 接口各针脚定义 (21)2. 电路板尺寸及孔位置. (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC 的含义和特点1.PMAC的含义:PMAC是 program multiple axis controller可编程的多轴运动控制卡。
机械电子学-多轴运动控制卡
案例2: 通道1使用差分信号 模拟量指令来控制 电机
3. Clipper运动控制卡硬件介绍
3.4.1 Clipper接口定义
J4 -设备接口(JMACH2) 包含4个通道的设备I/O: 限位输入标志、回零标志、脉冲&方向输出 信号 1. 34针母头扁平电缆连接T&B Ansley P/N 609-3441 2. 标准34线扁平电缆T&B Ansley P/N 17134 3. Phoenix端子型号FLKM 34 (male pins) P/N 22 81 06 3
J4 – 设备端口 (JMACH2)
J10 – 手轮或脉 冲/方向端口 (JHW/PD)
J9 – 通用数字输入 输出端口(JOPT)
3. Clipper运动控制卡硬件介绍
3.4.1 Clipper接口定义
J2 -串口(JRS232) 该接口可以使PMAC与上位机通过RS-232端口 进行通讯,Delta Tau提供了Acc-3L电缆将 PMAC接口转为DB-9端子。 1. 10针母头扁平电缆接口T&B Ansley P/N 609-1041 2. 标准10线扁平电缆T&B Ansley P/N 171-10
2. 运动控制卡简介
2.3 PMAC 运动控制卡
PMAC PCI系列(PMAC1, PMAC2)
2. 运动控制卡简介
2.3 PMAC 运动控制卡
PMAC PC104系列(PMAC2A-PC/104)
2. 运动控制卡简介
2.3 PMAC 运动控制卡
Clipper系列
3. Clipper运动控制卡硬件介绍
4轴点位运动控制卡DMC1000B用户手册

3.1.1 跳线配置 ................................................................................................................... 18 3.1.2 开关配置 ................................................................................................................... 19
2.5.1 单端输出接法 ........................................................................................................... 17 2.5.2 差分输出接法 ........................................................................................................... 17
雷泰运动控制卡 DMC1000∕DMC1000B
用户手册
Version 2.1
版 权 所 有
不 得 翻 印
©Copyright 2010 Leadshine Technology Co., Ltd. All Rights Reserved. 版 权 说 明 本手册版权归深圳市雷赛智能控制股份有限公司所有 (以下简称 雷赛公司) ,未经雷赛公司书面许可,任何人不得翻印、翻译和抄袭 本手册中的任何内容。 本手册中的信息资料仅供参考。由于改进设计和功能等原因,雷 赛公司保留对本资料的最终解释权,内容如有更改,恕不另行通知。
基于PCMC卡的多轴电机控制系统设计
基于PCMC卡的多轴电机控制系统设计
李建军;张凯龙;杨志义;梁克
【期刊名称】《机械与电子》
【年(卷),期】2006(000)007
【摘要】面向多维运动控制系统,提出了一种基于"嵌入式平台+PCMC卡"的EPMCC运动控制系统结构,以及在此平台上,结合嵌入式实时软件方式实现的多维运动协同控制方法.介绍了面向电子花样机嵌入式控制系统的软硬件设计原理和关键技术.
【总页数】3页(P23-25)
【作者】李建军;张凯龙;杨志义;梁克
【作者单位】西北工业大学,陕西,西安,710072;西北工业大学,陕西,西安,710072;西北工业大学,陕西,西安,710072;西北工业大学,陕西,西安,710072
【正文语种】中文
【中图分类】TP273.5
【相关文献】
1.基于PMAC卡的多轴控制系统设计 [J], 米艳强;刘江省;杨福来;赵建
2.基于单片机的多轴直流电机控制系统设计 [J], 纵榜峰;曹吉花
3.基于单片机和CPLD的多轴步进电机控制系统设计 [J], 梅阳凤;李军
4.基于FPGA的多轴步进电机控制系统 [J], 王刚; 林佳本; 郭晶晶; 张鑫伟; 佟立越; 白阳; 陈垂裕
5.基于MEMOBUS协议的多轴电机控制系统设计 [J], 姬琪;王红园
因版权原因,仅展示原文概要,查看原文内容请购买。
PMC3600 硬件手册(20140528)
运行状态 指示灯
DB37 出线 接口
扩展功能子 板接口
核心卡安装在计算机内部,核心卡上接口定义: J2:DB37 母座,通过 DB37 线缆和端子板相连,提供各种控制信号出线功能。 J4:DC3-10P 座,通过 10 芯 2.54mm 排线和功能子板相连,提供高速总线功能。
核心卡上指示灯定义: RUN:高速闪烁时,板卡工作在调试模式;低速闪烁时,板卡工作在正常状态;
不闪烁,板卡工作异常。 LK0:指示灯亮时,表示和端子板 0#数据链路工作正常;不亮时,表示链路异常。 LK1:指示灯亮时,表示和端子板 1#数据链路工作正常;不亮时,表示链路异常。
第 5 页 共 22 页
PMC3600 运动控制卡硬件手册
1.3.2 端子板
PMC3600 端子板通过 DB37 线缆和安装在 PC 机里的核心板相连,端子板安装在机柜内, PMC3600 端子板采用 107mm 宽度,可以配置 107 模组盒安装在 DIN 导轨上。端子板的尺 寸和结构如下:
针对激光加工设备的应用场景,PMC3600 卡专门设计了特殊的逻辑电路,使得激光控 制和运动平台的轨迹运动控制有效结合起来,满足高质量激光加工工艺要求。
PMC3600 运动控制卡采用标准 PCI 总线,使用 IBM-PC 及其兼容机作为上位机,安装 使用方便。同时 PMC3600 设计了一套简单易用、功能强大的编程接口,可以极大减轻用户 应用系统的开发负担,缩短调试时间,用户可以专注于应用系统本身复杂的工艺流程,而将 运动平台的细节控制交于板卡负责。
额定参数: 工作温度:0℃~50℃ 储存温度:-20℃~80℃ 湿度:5-85%,无结露 PCI 插槽电源(输入):+5VDC ± 5%,最大 500mA 外部电源 1(输入):+5VDC ± 5%,最大 600mA 外部电源 2(输入):+24VDC ± 5%,最大 1700mA
多轴运动控制主机DVP—10MC发布

多轴运动控制主机DVP—10MC发布
佚名
【期刊名称】《低压电器》
【年(卷),期】2011(0)16
【摘要】DVP-10MC系列是台达集团于2011年向用户重点推荐的产品之一,是台达首款总线型多轴运动控制主机,采用CANopen总线方式能实现多轴运动控制,通讯速度高达1Mb/s。
【总页数】2页(P64-65)
【关键词】多轴运动控制;控制主机;DVP;CANopen;总线方式;Mb/s;通讯速度;总线型
【正文语种】中文
【中图分类】TP275
【相关文献】
1.台达多轴运动控制器DVP10MC11T在凹版印刷机上的应用 [J], 台达集团
2.台达多轴运动控制器DVP-15MC系列在汽车合装线上的应用 [J], ;
3.总线高速典范多轴智控先锋——台达DVP—10MC [J],
4.台达多轴运动控制器DVP-15MC系列在汽车合装线上的应用 [J], 无
5.台达多轴运动控制器DVP-15MC助力全自动16头柱塞泵灌扎线提高灌装效能[J], 中达电通股份有限公司[1]
因版权原因,仅展示原文概要,查看原文内容请购买。
MC-BOARD运动控制主板接口说明V1
MC-BOARD-V2.0运动控制主板接口说明1 概述 (1)2 安装尺寸 (3)2.1主板安装尺寸 (3)2.2按键面板尺寸 (4)3 实物图和接口一览 (5)3.1 MC-BORAD-V2.0主板实物图 (5)3.2 人机面板实物图 (6)4 接口信号说明 (7)4.1 电源接口JP0(4pin 3.81mm) (7)4.2 USB接口 (7)4.3 四轴限位接口(6pin 3.81mm) (7)4.4 X/Y/Z/U四个运动轴驱动接口(X、Y、Z、U 6pin 3.81mm) (8)4.5 人机操作面板接口P1 (8)4.6 通用输入输出口IO(5pin 3.81mm) (9)4.7 激光电源接口(6pin 3.81mm) (9)5 激光电源接口举例 (11)5.1 单玻璃管,数字激光电源 (11)5.2 单玻璃管,模拟激光电源 (11)5.3 双玻璃管,模拟激光电源,机器厂家无外接电位器电路 (12)5.4 双玻璃管,模拟激光电源,机器厂家外接电位器电路 (13)5.5 通用射频CO2激光器 (14)6 步进电机驱动器接口举例 (15)6.1概述 (15)6.2 脉冲信号上升沿有效 (15)6.3脉冲信号下降沿有效 (16)7 输出IO口接线示例 (18)8 人机界面操作说明 (19)8.1 主界面介绍 (19)8.2 按键介绍 (20)1 概述MC-BOARD主板专用于激光雕刻/切割运动控制系统中,其最大支持四个轴的运动控制,其中支持X/Y两轴的联动控制,同时支持Z/U两轴的点动控制。
X/Y/Z轴有复位功能,有最大最小坐标限制,Z轴可用于控制平台的上升和下降运动;U轴无复位功能,无最大最小坐标限制,可用作双向循环上料轴。
目前超达系统MC-BOARD主板不能兼容市面上所有的U盘。
经过测试,如下U盘可以使用:朗科、威刚、台电、新科、爱国者、清华同方、清华普天、清华紫光、深圳天琴、华人闪盘、深圳汉鑫科技等;我们将测试更多的U盘,不断丰富可以兼容的U盘类型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录PMAC控制卡学习(硬件) (3)第一章 PMAC简介 (3)1.1 PMAC的含义和特点 (3)1.2 PMAC的分类及区别 (4)1.2.1 PMAC的分类 (4)1.2.2 PMAC 1型卡与2型卡的主要区别 (4)第二章Turbo PMAC Clipper控制器硬件配置 (5)2.1 Turbo PMAC Clipper控制器简介 (5)2.2 Turbo PMAC Clipper硬件配置 (5)2.2.1 Turbo PMAC Clipper硬件标准配置为: (5)2.2.2 Turbo PMAC Clipper控制器可选附件 (8)2.2.2.1 轴接口板 (8)2.2.2.2 反馈接口板 (9)2.2.2.3 数字I/O接口板 (9)第三章 Turbo PMAC Clipper设备连接 (9)3.1 板卡安装 (9)3.2 控制卡供电 (10)3.2.1 数字电源供电 (10)3.2.2 DAC(数字/模拟转换)输出电路供电 (10)3.2.3 标志位供电 (10)3.3 限位及回零开关 (10)3.3.1 限位类型 (11)3.3.2 回零开关 (11)3.4电机信号连接 (11)3.4.1增量式编码器连接 (11)3.4.2 DAC 输出信号 (12)3.4.3 脉冲&方向(步进)驱动 (12)3.4.4 放大器使能信号(AENAn/DIRn) (13)3.4.5 放大器错误信号(FAULT-) (13)3.4.6 可选模拟量输入 (13)3.4.7 位置比较输出 (14)3.4.8 串行接口(JRS232) (14)3.5 设备连接示例 (14)3.6 接口及指示灯定义 (16)3.7 跳线定义 (19)3.8 Turbo PMAC Clipper端口布置及控制结构图 (23)附件 (26)1.接口各针脚定义 (26)2. 电路板尺寸及孔位置 (35)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
2.PMAC的特点:PMAC卡是美国Delta Tau公司九十年代推出的多功能运动控制器,能够提供运动轴控制,PLC控制和数据采集等多种功能。
1.2 PMAC的分类及区别1.2.1 PMAC的分类1. PMAC卡按控制电机的控制信号来分:有1型卡和2型卡。
1型卡控制信号为±10V 模拟量,主要用速度方式控制伺服电。
2型卡输出PWM数字量信号,可直接变为PULSE+DIR 信号,来控制步进电机和位置控制方式的伺服电机。
2. PMAC卡按控制轴数来分:有2轴卡(MINI PMAC PCI),4轴卡(PMAC PCI Lite,PMAC2 PCI Lite, PMAC2A-PC/104及Clipper),8轴卡:(PMAC-PCI,PMAC2-PCI,PMAC2A-PC/104及Clipper),32轴卡:(TURBO PMAC和TURBO PMAC2)。
3. PMAC卡按通讯总线形式分:有ISA总线,PCI总线,PCI04总线,网口和VME总线。
PMAC各种轴数的1型和2型卡,都有上述的计算机总线方式供选择。
PMAC除上述板卡形式外,还可以提供集成的系统级产品.有:UMAC,IMAC400,IMAC800 ,IMAC flexADVANTAGE400 ,ADVANTAGE900等。
1.2.2 PMAC 1型卡与2型卡的主要区别PMAC 1PMAC2CPU时钟(缺省)20MHZ40MHZ控制信号形式DAC模拟量PWM数字量双端口RAM选项只有8轴卡不在板在板在板I/O点数16IN 16OUT32IN/OUT +8IN 8 OUT常用接线板ACC8D ACCP ACC8F ACC8S ACC8E第二章Turbo PMAC Clipper控制器硬件配置2.1 Turbo PMAC Clipper控制器简介Turbo PMAC Clipper控制器(Turbo PMAC2 Eth-Lite) 是一款具备全部Turbo PMAC 特征的,用于对成本极端敏感的应用的多轴运动控制器。
这种功能强大的,但是又同时具备结构紧凑和超高性价比优点的多轴运动控制器,标准版本即带有Ethernet 以太网和 RS232 通讯接口以及内置 I/O。
Clipper 控制器不仅采用了一颗完整的Turbo PMAC2-CPU 而且提供了一个四轴伺服或步进控制加32个数字I/O 点的最小配置,控制轴数和I/O还可以扩展。
2.2 Turbo PMAC Clipper硬件配置2.2.1 Turbo PMAC Clipper硬件标准配置为:电路板尺寸是110mm×220mm;80 MHz DSP56303 Turbo PMAC CPU(CPU时钟频率为80MHZ);256k x 24用户SRAM(即静态随机存储器,是一种具有静止存取功能的内存,不需要刷新电路即能保存它内部存储的数据。
存储容量为256K,地址线有24条。
);1M x 8 flash mermory用于备份及固件存储;(闪存是一种非易失性存储器,即断电数据也不会丢失。
内存为1M,8条I/O接口。
);RS-232串行接口;(计算机上的通讯接口之一,通常 RS-232 接口以9个引脚?(DB-9)的型态出现,一般个人计算机上会有两组 RS-232 接口,分别称为 COM1 和 COM2。
);100 Mbps以太网接口;(传输速率100Mbps=100/8=12.5MB/s)480 Mbps USB 2.0接口;4通道轴接口电路,每个通道包含:在板模拟量±10V(12位)输出(输出的量为模拟量即为“模拟量输出”。
最常用的地方是电子技术领域,比如DA转换输出的即为模拟电流/电压(连续变化的电流/电压),模拟整流电路输出的也是模拟量。
);在板脉冲加方向数字输出;3通道差分/单端编码器信号输入(差分信号:差分传输在两根线上都传输信号,这两个信号的振幅相等,相位相反。
差分信号传输的是两根信号之间的电平差。
单端信号是在一跟导线上传输的与地之间的电平差。
);5个标志信号输入(限位,回零,报警等),2个标志信号输出;UVW TTL-level霍尔传感器输入(霍尔效应是电磁效应的一种,当电流垂直于外磁场通过导体时,在导体的平行于磁场和电流方向的两个端面之间会出现电势差,这一现象就是霍尔效应。
这个电势差也被称为霍尔电势差。
霍尔传感器是根据霍尔效应制作的一种磁场传感器,用途有:检测磁场或磁特性,位移测量,力测量,角速度测量,线速度测量等。
TTL电平信号(TTL-level)是一种采用二进制规定表示的数据信号,TTL 的电源工作电压是5V,所以TTL的电平是根据电源电压5V来定的,+5V等价于逻辑“1”,0V等价于逻辑“0”,这被称做TTL(晶体管-晶体管逻辑电平)信号系统,这是计算机处理器控制的设备内部各部分之间通信的标准技术。
)。
50针IDC接头的放大器/编码器接口(IDC即Internet Data Center,即互联网数据中心是基于Internet网络,为集中式收集、存储、处理和发送数据的设备提供运行维护的设施基地并提供相关的服务。
IDC提供的主要业务包括域名注册查询主机托管(机位、机架、机房出租)、资源出租(如虚拟主机业务、数据存储服务)、系统维护(系统配置、数据备份、故障排除服务)、管理服务(如带宽管理、流量分析、负载均衡、入侵检测、系统漏洞诊断),以及其他支撑、运行服务等。
)IDC接头34针IDC接头的标志位接口;4针Molex供电接口(5V, ±12V(±12V仅为模拟量输入或输出时使用), GND);Molex接头PID/陷波/前馈控制算法(PID控制算法是将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成,对被控对象进行控制。
PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。
陷波,是电力电子装置在正常工作情况下,交流输入电流从一相切换到另一相时产生的周期性电压扰动。
陷波器是利用压电效应制成的带阻滤波器,它的作用是阻止或滤掉信号中有害分量对电路的影响。
前馈控制指通过观察情况、收集整理信息、掌握规律、预测趋势,正确预计未来可能出现的问题,提前采取措施,将可能发生的偏差消除在萌芽状态中,为避免在未来不同发展阶段可能出现的问题而事先采取的措施,是在企业生产经营活动开始之前进行的控制,是一种开环控制。
);32个通用TTL电平I/O点(方向可控):16位复用端口,支持Delta Tau的I/O附件(系统在复用端口上进行通讯,只对输入的信息进行字符匹配,不对网络数据进行任何拦截、复制类操作,所以对网络数据的传输性能丝毫不受影响。
);16位Opto端口,支持Opto-22类型设备(OPTO22是PAC产品之一,由美国opto22公司生产制作,目前全球唯一提供终身保用承诺的工控产品。
)。
2路手轮端口,每路包含:正交编码器输入;脉冲(PFM或PWM)输出(开关电源的控制技术主要有三种:(1)脉冲宽度调制(PWM);(2)脉冲频率调制(PFM);(3)脉冲宽度频率调制(PWM-PFM)。
脉宽宽度调制式(PWM)开关型稳压电路是在控制电路输出频率不变的情况下,通过电压反馈调整其占空比,从而达到稳定输出电压的目的。
PFM:(Pulse?frequency?modulation)?脉冲频率调制是一种脉冲调制技术,调制信号的频率随输入信号幅值而变化,其占空比不变。
由于调制信号通常为频率变化的方波信号,因此,PFM也叫做方波FM)。
2.2.2 Turbo PMAC Clipper控制器可选附件2.2.2.1 轴接口板ACC-1P- 4 通道轴扩展接口板,反馈和I/O扩展接口板;ACC-8ES- 4 通道模拟量输出接口板;ACC-8FS- 4 通道数字PWM输出接口板。
(接口板主要用途:1.通过并口线与电脑并口连接,输出部分电机驱动器连接,即可用电脑直接控制电机的运动,支持MACH、KCAM等软件2. 有功率输出接口,且每个功率输出都可以分别用不同的电压控制,最高控制电压100V。
其中主轴并口为PWM调速控制,可在MACH3软件中实现调速控制,继电器控制并口可接MACH3软件中控制开关;2.有限位和急停接口,简单的连接两根线就可以实现限位和急停功能,并且限位和急停接口都有光耦与并口隔离。
)2.2.2.2 反馈接口板ACC-1P- 4 通道轴扩展接口板,反馈和I/O扩展接口板;ACC-51S- x4096高分辨率正弦编码器细分板;ACC-8TS- ACC-28B附件的高分辨率模拟量输入扩展接口板。