PMAC多轴运动控制卡
PMAC

PMAC控制卡、PMAC多轴控制卡、PMAC运动控制卡、PMAC运动控制器
上海轶舜国际贸易有限公司特价美国PMAC控制卡、PMAC多轴控制卡、PMAC运动控制卡、PMAC运动控制器等产品。
pmac(program multiple axises controller)是美国delta tau公司生产制造的多轴运动控制卡,是世界上功能最强,计算速度最快,质量可靠的运动控制产品。
随着中国汽车,机械,电子,军工等产业的飞速发展,pmac多轴运动控制卡将为中国的制造业和自动化产业提供更多的选择。
涉及机器人、数控机床、坐标测量机、激光加工、雕刻机、旋转刀、x-y系统、以及高速印刷、包装、贴标机等各类自动化设备。
PMAC多轴运动控制卡学习(硬件)
目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC的含义和特点 (2)1.2 PMAC的分类及区别 (2)1.2.1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2.1 Turbo PMAC Clipper硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper控制器可选附件 (6)2.2.2.1 轴接口板 (6)2.2.2.2 反馈接口板 (7)2.2.2.3 数字I/O接口板 (7)第三章 Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3.2 控制卡供电 (7)3.2.1 数字电源供电 (7)3.2.2 DAC(数字/模拟转换)输出电路供电 (8)3.2.3 标志位供电 (8)3.3 限位及回零开关 (8)3.3.1 限位类型 (8)3.3.2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4.2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3.4.4 放大器使能信号(AENAn/DIRn) (10)3.4.5 放大器错误信号(FAULT-) (10)3.4.6 可选模拟量输入 (11)3.4.7 位置比较输出 (11)3.4.8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3.8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1.接口各针脚定义 (21)2. 电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
PMAC可编程多轴控制器简介

PMAC 可编程多轴控制器简介PMAC 是可编程多轴控制器(Programmable Multi-Axis Controller)的简称,是美国Delta Tau 公司生产的功能强大的运动控制器,PMAC 是目前世界上功能最强的运动控制器之一,是当前开放式数控系统控制器的突出代表。
图3.3为PMAC 的硬件原理和接口图[22]。
PMAC 是一台具有独立内存、独立运算操作能力的计算机[23],它采用Motorola 的DSP56001作为CPU ,它可以通过存储在自己内部的程序进行单独的操作;它还是一台实时的、多任务的计算机,能自动对任务进行优先等级判别,先执行优先级高的任务。
PMAC 既可以独立工作亦可按主机的命令进行工作,它和主机的通讯可以通过串行口也可以通过总线进行,通过总线通讯时,还可以将中断信号引入主机,从而实现非常灵活有效的控制系统。
PMAC 最多可以控制8个轴同时运动,在对伺服数据的处理能力、轴特性及输入信号带宽方面,PMAC 控制器由于采用专门的模块化结构,编码输入的串行处理速度是大多数控制器的10到15倍,SUBAT(Servo Update/Block/Algorithm Term 伺服更新率/块执行速率/伺服算法的项数)是非DSP 控制器的几十倍;它还可从高分辨率编码器件接收低插补位的5位并行数据;可得到320MHz 的有效输入带宽;其DAC 输出分辨率高达16/18位;PMAC 在实际的运动之前,先进行预运算,将不同的运动轨迹按某种模式(如:PMAC 具有内置PLC ,可以在后台同时运行32个异步PLC 程序,同时PMAC 提供了非专用的数字输入/输出口,利用这些I/O 口可以完成机床的逻辑控制,控制面板的操作、位置反馈、手轮及主轴的操作等。
变频器在印染设备多电机同步调速中的应用发表于 2007-7-1 18:56:58 变频器在印染设备多电机同步调速中的应用摘要: 本文概述了变频器在印染设备多电机同步调速中的应用,从通用变频器到伺服变频器,包括有松紧架和无松紧架以及卷绕驱动。
PMAC卡简介
1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
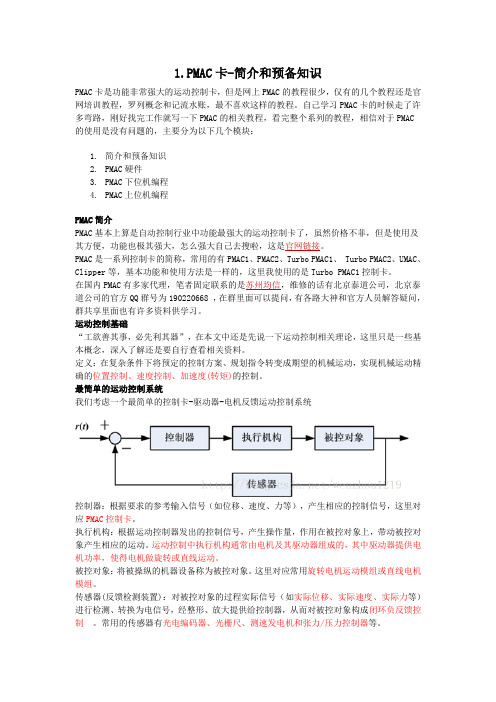
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。
PMAC多轴运动控制卡学习(硬件)
目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC的含义和特点 (2)1.2 PMAC的分类及区别 (2)1.2.1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2.1 Turbo PMAC Clipper硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper控制器可选附件 (6)2.2.2.1 轴接口板 (6)2.2.2.2 反馈接口板 (7)2.2.2.3 数字I/O接口板 (7)第三章 Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3.2 控制卡供电 (7)3.2.1 数字电源供电 (7)3.2.2 DAC(数字/模拟转换)输出电路供电 (8)3.2.3 标志位供电 (8)3.3 限位及回零开关 (8)3.3.1 限位类型 (8)3.3.2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4.2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3.4.4 放大器使能信号(AENAn/DIRn) (10)3.4.5 放大器错误信号(FAULT-) (10)3.4.6 可选模拟量输入 (11)3.4.7 位置比较输出 (11)3.4.8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3.8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1.接口各针脚定义 (21)2. 电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
PMAC多轴运动控制卡培训

例: BUS ADD=$10*E66+$20*E67+$40*E68+$80*E69+$100*E70+$200*E71 +$400*E91+$800*E92
J2(JPAN) :操作控制面板接口,可连接的附件有ACC18, I2=1 时, 该接口的输入及输出 可作为通用I/O点使用。
PMAC多轴运动控制卡
PMAC I型卡的接口:
. MINI PMAC PMAC1.5-lite PMAC-PC 相同接口
J3(JTHW): 多路I/O点的扩展接口, 该接口本身可提供8 点输入及 8点输出,还可与下属附件连接:
ACC34 I/O 扩展板,可提供32IN 32OUT 输入及输出 ACC16 BCD 拨码开关接口板 ACC27 专用8in/8out 接口板 ACC8D opt 7 旋转变压器反馈接口板 ACC8D opt 9 安川绝对编码器反馈接口板 ACC33 NC 操作面板接口板
JRS422 or JRS232): PMAC卡的串行接口 PMAC-PC 卡,在板为RS422口 MINI PMAC Universal PMAC 在板为RS232口
注:PMAC-PC卡无TB1端子
PMAC多轴运动控制卡
PMAC I 型卡的跳线设置:
E3—E6: 伺服时钟频率 与I10变量有关,缺省为E5 E6为ON E29—E33: 相时钟频率,缺省为9.04KHZ,E31设为ON. E34—E38 :编码器采样时钟频率,缺省为:9.8304MHZ E34设为ON. E17A-E17D: 1-4电机的伺服使能的极性控制 E24—E27: 1-4 编码器的输入形式控制,是单端/差分线驱动输入,1-2 ON
PMAC运动控制器初级应用

13
基本电机定义 I-变量
PMAC 运动控制器的初级应用
PMAC 代表 Programmable Multi-Axis Controller 可编程的多轴控制器
PMAC 可以服务于各个行业,从精密到微米级的设备到 上千马力的重型设备。
PMAC应用包括:
机器人 食品机械 机床 印刷机械 木工机械 包装机械 及其他
18
Ixx25 - Motor x Flag Address for TURBO
TURBO PMAC address of flags Hex($)
0
7
8
0
0
8
B 0 0 0 0 0 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 in
因为TURBO PMAC的内存地址,一个新的标志设定
使用提前计算出的每点坐标 使用变量公式
或
X1 X1.0173 X1.0343 . . X0.9824 X1
P1=0 WHILE (P1<361) P2=SIN(P1) +COS(P1) X(P2) P1=P1+1 ENDWHILE
30
Q-变量
Q-变量是用户全局变量可用于PMAC编程中的计算.
Q-变量时坐标系下的 变量
=0 Enable amplifier fault input =1 Disable amplifier fault input =00 Kill all PMAC motors on fault or F.E. =01 Kill all C.S. motors on fault or F.E. =1x Kill this motor only on fault or F.E. =0 Low true fault input =1 High true fault input
简述PMAC2型运动控制卡
简述PMAC2型运动控制卡发布时间:2013.09.18PMAC2型运动控制卡PMAC2A-PC/104是PMAC板卡级系列产品中的一员,它被设计成OEM系列的产品,在提供齐全的PMAC 板卡功能的同时,拥有更小巧的结构,更全面的功能,和更方便的扩展性。
不采用附件时,它可以使用模拟量±10V或者脉冲加方向的位置控制信号,通过附件还可以是PWM的脉宽斩波输出。
可以通过104总线与上位机通讯,也可以使用双端口RAM提高总线的通讯速度,脱机独立工作时,还可以使用RS-232或者RS-422串口,USB和以太网通讯。
PMAC2A PC/104 控制器的特点硬件特点:40 MHz DSP563xx CPU;128k x 24 零等待SRAM;512k x 8 flash memory 用于固件和用户备份;2k x 8 EEPROM memory 用于参数备份;最新版本的固件;RS-232/422 串口,PCI (PC) 总线接口;4轴通道接口电路,每一个包括:PMAC2A PC/104控制卡在板模拟量±10V(12位)输出;PMAC2A PC/104控制卡在板脉冲加方向输出;PMAC2A PC/104控制卡 3路标准编码器输入;PMAC2A PC/104控制卡四个标志信号输入(限位,回零,报警等),两个标志信号输出(使能等);通用I/O,可扩展I/O;高精度时钟+/-100 ppm;PID/馅波/前馈伺服算法。
软件特点:运动轨迹规划PMAC2A PC/104控制卡支持S曲线加减速的直线插补;PMAC2A PC/104控制卡支持S曲线加减速的圆弧插补;PMAC2A PC/104控制卡点到点快速运动;PMAC2A PC/104控制卡三次样条插补模式spline;PMAC2A PC/104控制卡三次隐式样条插补Hermite-spline (PVT);PMAC2A PC/104控制卡自动硬件捕捉/触发功能;PMAC2A PC/104控制卡交互式手动运动;PMAC2A PC/104控制卡可选择的运动提前预算lookahead。
PMAC运动控制系统

编程语言与开发环境
编程语言
PMAC运动控制系统支持多种编程语 言,如C、C、Python等,方便用户 根据项目需求选择合适的编程语言进 行开发。
开发环境
PMAC提供完整的集成开发环境(IDE ),包括代码编辑器、编译器、调试 器等,方便用户进行软件开发和调试 。
运动控制算法
控制器通常采用高性能的微处理器或专用集成电路(ASIC),具有高速运 算和控制能力。
控制器可以实现多轴联动控制,支持多种运动模式和轨迹规划,满足复杂 运动控制需求。
伺服驱动器
伺服驱动器是连接控制器和 伺服电机的桥梁,负责接收 控制器的控制信号,并将其 转换为适合伺服电机运行的
电压或电流信号。
伺服驱动器具有过载保护、 速度控制、转矩控制等功能 ,能够确保伺服电机在各种
PMAC运动控制系统的应用案例
数控机床的改造
数控机床是现代制造业的重要设备, 通过改造数控机床,使用PMAC运动 控制系统,可以提高加工精度、加工 效率和加工质量。
PMAC运动控制系统能够实现高精度 的位置控制和速度控制,同时具有强 大的编程和调试功能,可以根据不同 的加工需求进行定制化配置。
自动化生产线控制
自动化生产线
用于控制生产线的传送带、机械臂等设备的 运动,实现自动化生产。
机器人
用于控制机器人的关节运动,实现机器人的 精确轨迹跟踪和动作控制。
激光加工
用于控制激光切割、焊接和打标设备的运动 ,实现高精度的激光加工。
PMAC的发展历程
1980年代
PMAC的原型问世,主要用于高 精度机床的控制。
1990年代
工况下的稳定运行。
伺服驱动器还具有多种反馈 接口,可以与传感器配合使 用,实现高精度的位置和速 度控制。
PMAC卡的分类及各种卡的区别

PMAC卡的分类及各种卡的区别一、前言为了让公司员工以及客户能在近短的时间内掌握PMAC卡的基本应用,能简单操作PMAC卡,特编写次培训教材,希望大家提出宝贵的修改意见。
一、PMAC的分类PMAC主要分为板卡级的和系统级的;系统级分为QMAC和UMAC;板卡级的分为是Turbo卡还是Non-Turbo卡,在Turbo和Non-Turbo中又分是PMAC1(一型卡一般不标1,默认是PMAC)还是PMAC2。
Turbo和Non-Turbo的主要区别在于:●Turbo 可以扩展到32轴而Non-Turbo最多可以扩展到8轴●Turbo卡有lookahead和方向运动学的功能而Non-Turbo没有●Turbo卡有扩展的伺服算法而Non-Turbo没有PMAC1和PMAC2的主要区别在于:●PMAC1在板上的输出是±10V模拟量控制而PMAC2是±10V模拟量控制、3相直接PWM数字输出控制、脉冲+方向输出控制;从卡的外形上看PMAC1的轴接口是60芯的(四通道/接口)而PMAC2的轴接口是100芯的(2通道/接口)I)、PMAC板卡级产品型号说明从上图可以看出PMAC板卡的型号是A PMAC B - C DA:CPU类型空= 非Turbo类型,软件能控制8轴;Turbo = Turbo类型,软件能控制32轴;B:伺服接口类型空= PMAC(1)型卡,±10V模拟量控制;1.5 = PMAC(1)型卡,±10V模拟量控制,用Flash来备份;2 = PMAC2型卡●±10V模拟量控制(单端或差动的)●3相直接PWM数字输出控制●脉冲+方向输出控制2A= PMAC2型卡,内置±10V模拟量控制(也)C:总线类型空/PC = ISA 总线PCI = PCI 总线PC/104 = PC/104总线VME = VME总线D:伺服接口通道数空= 在板4或8个通道Lite =在板4个通道Mini =在板2个通道Ultralite =在板没有通道(仅仅是MACRO 光纤通讯)例1:Turbo PMAC2 – PCI Ultralite首先是Turbo卡具有扩展32轴的能力(即是控制32轴的固件),PMAC2是PMAC 二型卡具有±10V模拟量、3相直接PWM和脉冲+方向输出控制,PCI是PCI的总线,Ultralite是采用光纤通讯在板上没有轴通道芯片。
PMAC多轴运动控制器研究

PMAC多轴运动控制器研究随着工业自动化的快速发展,多轴运动控制器在各种工业应用中的重要性日益凸显。
在这种背景下,PMAC(Programmable Multi-Axis Controller)多轴运动控制器作为一种先进的控制解决方案,引起了广泛。
本文将详细介绍PMAC多轴运动控制器的原理、设计及其实验结果,并探讨其未来研究方向和应用前景。
多轴运动控制器是指能够同时控制多个轴运动的控制器。
在工业自动化领域,多轴运动控制器广泛应用于机器人、数控机床、印刷机等设备。
PMAC多轴运动控制器作为一种可编程控制器,具有高度的灵活性和通用性。
它允许多个轴的运动控制相互独立,同时又协调一致,以实现复杂的运动轨迹和精确的位置控制。
PMAC多轴运动控制器采用基于PC的开放式体系结构,通过高速光纤总线实现与PC的高速数据传输。
控制器硬件由多个轴控制器模块和I/O模块组成,每个轴控制器模块可独立控制一个轴,I/O模块则用于输入输出信号的处理。
PMAC多轴运动控制器的核心是运动控制算法。
算法采用基于矢量控制的方法,通过实时计算速度和位置误差,实现对电机的精确控制。
PMAC还支持多种编程语言,如C++、和Python,方便用户根据具体应用进行软件开发。
为了验证PMAC多轴运动控制器的性能,我们进行了一系列实验。
在实验中,我们将PMAC控制器应用于一台五轴数控机床,通过控制五个电机的运动,实现了对工件的精确切割。
实验结果表明,PMAC控制器在位置控制和速度控制方面都具有很高的精度和稳定性。
我们还对比了PMAC控制器和其他多轴运动控制器的性能。
对比结果表明,PMAC控制器在动态性能、稳态精度和抗干扰能力等方面都具有显著优势。
这主要得益于PMAC控制器的开放式体系结构、高速数据传输和先进的运动控制算法。
本文对PMAC多轴运动控制器进行了详细研究。
通过介绍PMAC控制器的原理、设计和实验结果,我们证明了PMAC作为一种先进的可编程多轴运动控制器,在工业自动化领域具有广泛的应用前景。
PMAC多轴运动控制器研究
兰州理工大学硕士学位论文
die, oo ad esr U ig e hrceitc f fwr ad rvr m tr n sno. n t caatrsi o s tae n s h o hrwr , i st fr e ei l nto , m k i rn ra l a dae t e u o t s ca f c in o e u n m ly i s p h p u t a t o M l ia i to cn r le gv s h ge t uc in f dutn u t-x s o in oto lr ie te r a fnto o a jsig m
李丙才摘要传统的轴联动控制通过对多轴运动控制器研究将控制单元与微型计算机构成组合系统由一台微型计算机来统一控制多个控制单元继而控制相应的运动轴实现多轴联动的控制使不同电机之间的运动控制有机协调起来最终目的是达到系统整体的全局性能的最优化
实用价值。
关键词: MC PA 多轴运动控制器
开放式数控系统
运动程序和PC L 程序
同步运行 PD I 参数调节
兰州理工大学硕士学位论文
T e b et t e se t to : e sa c o te h s jc o h d sr a in T r er h h u f i h e f
PA m l ia i m to cnr le i n o t o l r M C u t - x s o
G a u t su e t in a g e r d a e dn :T a X n k t i Ttr L B n c i uo : ig a i
Ab ta t sr c
prmtr D bt cnt ag isl wt te ain agn aaee I, i a' c ne ef h s to c nig P u t h t i h t h
多轴运动控制卡课设
多轴运动控制卡课设多轴运动控制卡是一种用于控制多轴运动的电子设备,在工业自动化领域得到广泛应用。
本文将从多轴运动控制卡的基本原理、应用场景和设计过程等方面进行详细介绍。
一、多轴运动控制卡的基本原理多轴运动控制卡的主要功能是控制多个电机同时运动,从而实现复杂的运动轨迹。
在多轴运动控制卡中,通过一个高速的时钟信号来控制各个轴的运动,这个时钟信号被称为“步进脉冲”。
当接收到步进脉冲信号后,电机会按照一定的步距和速度进行运动。
多轴运动控制卡的核心部件是FPGA芯片。
FPGA是一种可编程逻辑器件,可以根据需要进行编程,实现多种功能。
在多轴运动控制卡中,FPGA芯片负责产生步进脉冲信号,并控制各个轴的运动。
此外,多轴运动控制卡还需要配合驱动器、电机、传感器等配件一起使用,以实现精密的运动控制。
二、多轴运动控制卡的应用场景多轴运动控制卡广泛应用于工业自动化、机器人、医疗设备、航天航空等领域。
以机器人为例,在制造过程中需要进行各种复杂的运动,如抓取、放置、旋转、倾斜等。
多轴运动控制卡可以实现机器人的多个轴同时运动,从而实现复杂的运动轨迹,提高生产效率。
在医疗设备领域,多轴运动控制卡可以控制医疗设备的精度和速度,从而确保手术的安全性和准确性。
同时,多轴运动控制卡还可以实现医疗设备的自动化操作,减少医护人员的工作强度。
三、多轴运动控制卡的设计过程多轴运动控制卡的设计过程包括硬件设计和软件设计两个方面。
硬件设计方面,需要根据实际需求选择FPGA芯片、驱动器、电机、传感器等配件,并进行电路设计和布局。
同时,还需要进行信号分析和干扰测量,确保系统的稳定性和可靠性。
软件设计方面,需要进行FPGA芯片的编程,实现步进脉冲信号的产生和轴的运动控制。
此外,还需要编写上位机软件,实现与多轴运动控制卡的通信和控制。
在设计过程中,需要考虑多轴运动控制卡的实时性、精度和稳定性。
同时,还需要根据实际需求进行性能测试和优化,确保系统的性能达到预期目标。
PMAC多轴运动控制卡学习硬件.doc
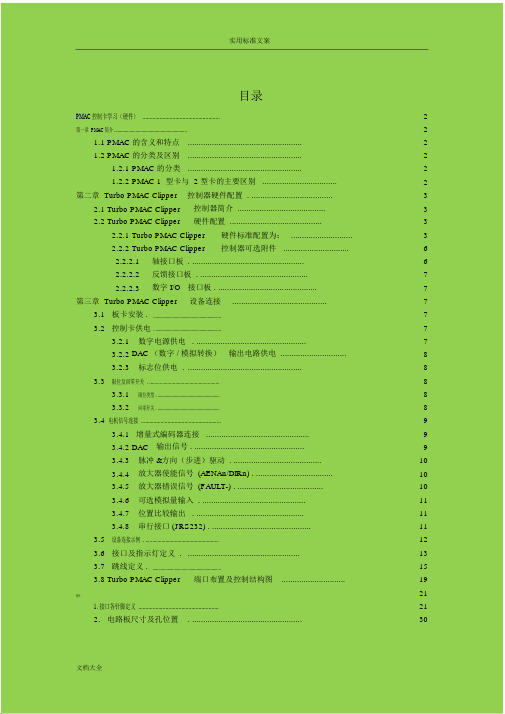
实用标准文案目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC 的含义和特点 (2)1.2 PMAC 的分类及区别 (2)1.2.1 PMAC 的分类 (2)1.2.2 PMAC 1 型卡与 2 型卡的主要区别 (2)第二章 Turbo PMAC Clipper 控制器硬件配置 . (3)2.1 Turbo PMAC Clipper 控制器简介 (3)2.2 Turbo PMAC Clipper 硬件配置 (3)2.2.1 Turbo PMAC Clipper 硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper 控制器可选附件 (6)2.2.2.1 轴接口板. (6)2.2.2.2 反馈接口板 . (7)2.2.2.3 数字 I/O 接口板 . (7)第三章 Turbo PMAC Clipper 设备连接 (7)3.1 板卡安装 . (7)3.2 控制卡供电. (7)3.2.1 数字电源供电. (7)3.2.2 DAC (数字 / 模拟转换)输出电路供电 (8)3.2.3 标志位供电 . (8)3.3 限位及回零开关 . (8)3.3.1 限位类型 . (8)3.3.2 回零开关 . (8)3.4 电机信号连接 (9)3.4.1 增量式编码器连接 (9)3.4.2 DAC 输出信号 . (9)3.4.3 脉冲 &方向(步进)驱动 . (10)3.4.4 放大器使能信号 (AENAn/DIRn) . (10)3.4.5 放大器错误信号 (FAULT-) . (10)3.4.6 可选模拟量输入 . (11)3.4.7 位置比较输出. (11)3.4.8 串行接口 (JRS232) . (11)3.5 设备连接示例 . (12)3.6 接口及指示灯定义 . (13)3.7 跳线定义 . (15)3.8 Turbo PMAC Clipper 端口布置及控制结构图 (19)21 附件 .......................................................................1. 接口各针脚定义 (21)2. 电路板尺寸及孔位置. (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC 的含义和特点1.PMAC的含义:PMAC是 program multiple axis controller可编程的多轴运动控制卡。
PMAC多轴运动控制卡培训

PMAC JOG S 曲 线 加 速 轨 迹 曲 线
PMAC JOG S 曲 线与 直 线 加 速 轨 迹 曲 线
PMAC 电机回零指令及相关 I 变量
回零指令: #n HOME (HM) ; 电机n 执行回零运动
#n HOMEZ(HMZ)
;电机n不执行实际回 零运动,将当前位 置清零。
0:HM信号
1:+LIM信号 2:- LIM信号 3: FAULT信号
PMAC 电机回零指令及相关 I 变量
回零相关的I 变量:
I902(#1为例)(I9n2 PMAC 2 型卡): 回零信号的捕捕捉方式,可设置如下:
PMAC 卡 如 何 编 写 运 动 程 序
1. 定义坐标系:& n n为1-8个坐标系
2. 定义坐标轴:#n->(常数) X 或(Y Z U V W A B C)
n为1-8电机, A 为一常数。
定义举例: &1
#1->x #2->y &2 #4->20x #6->25.4y
PMAC 卡 如 何 编 写 运 动 程 序
定义举例: &1
#1->x #2->x &;y
不正确定义: &1 #1->x
#1->y
PMAC 卡 如 何 编 写 运 动 程 序
坐标轴定义矩阵:PMAC卡可如下定义轴矩阵
#1->a11X+a12Y+a13Z+b1
#2->a21X+a22Y+a23Z+b2
#3->a31X+a32Y+a33Z+b3
简介pmac运动控制卡
简介pmac运动控制卡
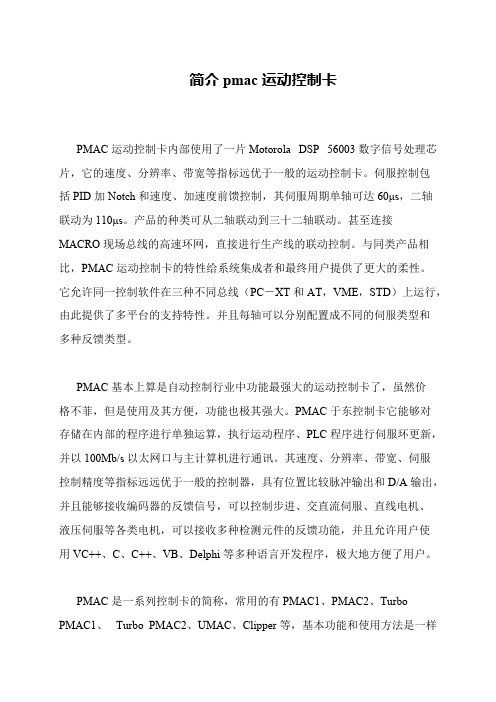
PMAC运动控制卡内部使用了一片Motorola DSP 56003数字信号处理芯片,它的速度、分辨率、带宽等指标远优于一般的运动控制卡。
伺服控制包
括PID加Notch和速度、加速度前馈控制,其伺服周期单轴可达60μs,二轴
联动为110μs。
产品的种类可从二轴联动到三十二轴联动。
甚至连接
MACRO现场总线的高速环网,直接进行生产线的联动控制。
与同类产品相比,PMAC运动控制卡的特性给系统集成者和最终用户提供了更大的柔性。
它允许同一控制软件在三种不同总线(PC-XT和AT,VME,STD)上运行,由此提供了多平台的支持特性。
并且每轴可以分别配置成不同的伺服类型和
多种反馈类型。
PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价
格不菲,但是使用及其方便,功能也极其强大。
PMAC于东控制卡它能够对
存储在内部的程序进行单独运算,执行运动程序、PLC程序进行伺服环更新,并以100Mb/s以太网口与主计算机进行通讯。
其速度、分辨率、带宽、伺服
控制精度等指标远远优于一般的控制器,具有位置比较脉冲输出和D/A输出,并且能够接收编码器的反馈信号,可以控制步进、交直流伺服、直线电机、
液压伺服等各类电机,可以接收多种检测元件的反馈功能,并且允许用户使
用VC++、C、C++、VB、Delphi等多种语言开发程序,极大地方便了用户。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样。
最新PMAC运动控制卡培训资料

执行 PLC 程序
在处理器允许的时间内尽可能快的扫描后台PLC PLC用在任何与运动程序异步的任务场合
DELTA TAU
Data Systems, Inc.
PMAC 任务优先级
单字符输入/输出
高
每个字符占用200纳秒,最高优先级保证PMAC在字符操作时不会失
去主机的控制
换相更新
缺省时无刷电机换相周期110微秒(换相操作占用3微秒 ),占用PMAC 运算能力的3%
伺服环更新
计算新的指令位置,读入新的实际位置,差值计算输出,缺省的伺服更 新时间442微秒(更新操作占用30~60微秒),占用PMAC运算能力7%
PWM
PWMABOT
Va
n
PWMBTOPn PWM PWMBBOT
n
PWMCTOPn PWM
PWMCBOT n DC BUS -
Vb
Motor
Vc
Encoder
换相算法 Encoder
DAC1 DAC2
AGnd
换相算法
ia measured
ib mEenacsoudreerd Feedback
DELTA TAU
PMAC 看门狗计时器 DELTA TAU
Data Systems, Inc.
(中级)
实时中断,置位W.D
后台任务经常没有事件, 因此停止更新计时器.
NOES Y
读 W.D 寄存器
W.D寄存器 > 0
E YES WS.DY.
寄存器递减计数
PMAC 算法确保 看门狗 检测25HZ 时钟信号.使得前后台任务稳定进行.
PMAC运动控制系统

增加指令的数值 四、换相更新 1. PMAC 以9KHZ的频率自动进行换向计算和控制; 2. PMAC 测量并估算 转子的磁场定向,然后处理电机的相之间的指令
最新版整理ppt
21
1)PMAC 的功能
五、资源管理 1. 常规管理 定期自动执行资源管理功能,以确认谁正常 2. 报警 跟随误差限制、 硬件超程限制、软件超程限制、 放大器报警 3. 看门狗的更新 在每个PLC扫描之间, PMAC 执行上述任务保证自身的正常更新,如果这些
最新版整理ppt
Spring刚性,刚度
Shock Absorber 减震,吸收
30
Im portant S etup I-V ariables
S E TU P P R O G R AM FU N C TIO N
➢先进的PID及扩展伺服算法
最新版整理ppt
20
1)PMAC 的功能
一、执行运动程序 1. PMAC 在某一时间执行一个运动, 并执行有关运动的所有计算 2. PMAC 总是在实际运动之前,正确地调和即将执行的运动 二、执行PLC程序 1. 以处理器允许的时间尽可能快的扫描PLC程序 2. PLC适用于某些异步于运动程序的运动过程 三、伺服环更新 1.对于每一个电机, PMAC都以一个固定频率(2KH左右)自动对其进行
最新版整理ppt
8
(2)开放式数控系统的结构形式:
✓ PC连接型NC 即将现有原型CNC与PC用通用串行线直接相连的一
种组成形式:DNC ✓ PC嵌入型NC 即在传统的专用数控机床中嵌入PC技术,PC与CNC
之间用专用总线连接。 -840系统。 ✓ 运动控制器+PC型 即在通用PC的扩展槽中插入运动控制卡,完全采用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
E-MOTION
PMAC多轴运动控制卡
PMAC 2-PC104 型卡接线
3、模拟量数据采集(A/D转换)
在板选项(J1 口) OPTION 12 : 2路A/D 输入 (12位分辨率) 附件选项 ACC-1P OPT2 : 2路A/D 输入 (12位分辨率) )
Ix02 指令输出地址
Ix03 位置环反馈地址 Ix04 速度环反馈地址
E-MOTION
PMAC多轴运动控制卡
PMAC 调整
PMAC的 伺服算法必须设置以适用于系统电机和放大 器的工作. 设置可通过I变量的调整,获取适当的PID增益数值称作 调整
需要学习: W PID 增益的含义 PID 伺服环的功能 如何设置系统 PID 增益 .
典型 P.I.D 伺服环
Following Error 跟随误差
CPU 24-BIT 40/60/80 MHz DSP56002
WATCHDOG TIMER
DSP GATE1 4-Channel SERVO ASIC
DSP GATE1 4-Channel SERVO ASIC
PMAC 系统应用
硬件安装 接口及接线 连结检查,E跳线
软件设置和定义
1、PMAC与上位机通讯 2、各变量的设置、定义
DAC Locations
指令 位置
位置 跟随误差
Ix02 PI CV+ DACn DACn+1
AMP
+
反馈位置 D
-
Y: $C002-$C03B
速度 反馈
LOAD
ENC
Encoder Table Ix04 ENCn ENCn+1
MOT LIN ENC
X: $0720-$073F Ix03
NEW IDEAS IN MOTION
Option 2
BUS
COMMUNICATIONS
INTERFACE
INPUT/ OUTPUT BUFFERS
Option 1
DSP GATE1 INPUT/ OUTPUT BUFFERS
BUS PORT
MACHINE PORT 2
MACHINE PORT 1
SRAM 128Kx24 ACTIVE MEMORY
Enc
P (proportional gain比例增益) I (integral gain积分增益) D (derivative gain微分增益)
Spring弹性,弹力 Shock Absorber 减震,吸收
E-MOTION
PMAC多轴运动控制卡
PMAC 卡PID调整的STEP 曲线分析
E-MOTION
E-MOTION
PMAC多轴运动控制卡
Machine I/O
Amplifier
A BC
A B C
interface
PMAC
Motor
Enc. Halls
Software Interface
E-MOTION
PMAC多轴运动控制卡
指令8轴同时运动 使用功能强大的数字信号处理芯片 (DSP) PMAC的 CPU 使用 Motorola DSP56001 或 DSP56002 他可以 处理所有8轴的计算 Turbo PMAC 使用 Motorola DSP5630x 处理所有32轴 的计算
Command + Position Error
=
Commanded Position 指令位置
-
Actual Position 实际位置
DAC 16 Bit
?10V
-
PID Digital Number Servo Algorithm ?32767 DAC Bits
AM P
M
Actual Position
4 路输出通道 4 路编码器输入通道 通过附件具有4路模拟量输入通道
I 型 PMAC 可以使用 1 to 4 门阵列.
NEW IDEAS IN MOTION
PMAC MOTION CONTROLLER CUSTOM GATE ARRAY IC
SELECTABLE-FR EQUENCY CLO CK IN PU TS ENCO DER SAM PLE SERVO PHASE DAC/ADC 160 PIN PLCC PACKAGE
8IN/8OUT I/O接口,5V输出电平不带光隔。 ACC-2P OPT3 的(J7口) : 16IN/OUT 自定义I/O接口,5VTTL电平 ACC-1P OPT 1的(J7口): 8 IN/8OUT 5 –24V电平。
扩展I/O
ACC-34AA: (串行I/O) 32IN/32OUT, 24V电平带光隔. 可多块级联(最多32块),与ACC-1P或ACC-2P相连。
PMAC 数据采集
E-MOTION
PMAC多轴运动控制卡
4、PMAC2 JMACH接口的+LIM –LIM HM 信号的连接 示意图
E-MOTION
PMAC多轴运动控制卡
PMAC 2-104型卡的接口及接线:
E-MOTION
PMAC多轴运动控制卡
2、I/O点连接
在板I/O
ACC-1P OPT1 或 ACC-2P OPT3 的(J2口) :
PID参数设定、系统调试
系统编程 1、坐标系定义 2、设计程序结构(运动,PLC’s)
编写和调试用户程序
上位软件开发
链接库、控件、HMI开发
E-MOTION
PMAC JMACH 接 口 示 意 图
PMAC多轴运动控制卡
E-MOTION
PMAC多轴运动控制卡
PMAC 2 型卡的电源:
+5V DC 电源 :供给PMAC卡的数字电路工 作 . BUS 总线提供
执行运动程序
PMAC 在某一时间执行一个运动, 并执行有关运动的
所有计算 PMAC 总是提前混合即将执行的运动
执行PLC程序
以处理器允许的时间尽可能快的扫描PLC程序
PLC适用于某些异步于运动程序的运动过程
NEW IDEAS IN MOTION
PMAC 可以做的工作(续)
常规管理 跟随误差限制 硬件超程限制 软件超程限制 放大器报警
PMAC 结构框图
模拟量
多路复用端口 I/O 缓存
I/O
I/O 缓存
MACRO光缆口
串行口
显示端口 I/O 缓存
手轮接口 I/O 缓存
比较输出口
DRIVERS
8/16 12-BIT ADCs EXPANSION
Option 12/12A
EXTRA SRAM 16Kx24 PARAMETER STORAGE
ACCE SSORY BOAR D
6 Lines
6 PW M Outputs per channel for Digital Am ps and PulsE & Direction Outputs for Stepper M otor
(G A TE-AR Y)
E-MOTION
PMAC多轴运动控制卡
每个PMAC固件有8轴的能力. 这8轴可以: 完全联动于一个坐标系下 可以独立的运行于各自的坐标系下 可以几个组合,实现某个功能 可以与其他的 15块PMAC级联,实现128轴的 完全同步运动
NEW IDEAS IN MOTION
E-MOTION
PMAC多轴运动控制卡
PMAC’s CPU 与轴的通讯 通过特殊设计的用户门阵列 ICs (DSPGATES). 每个门阵列:
在每个PLC扫描之间, PMAC 执行上述任务保证自身的正常更新,如果这 些功能不能在最小的频率内检测,卡上的看门狗将报警.
同上位机通讯 PMAC 可以与上位机实时通讯 如果指令是违法的, 他将报告给上位机 任务优先级 任务优先级保证卡的工作效率和安全 优先级是固定的,但是他们的频率时可以由用户控制的
L D L D
H O M E 1-4 +LIM IT 1-4 -LIM IT 1-4 FAU LT 1-4
AEN A 1-4 EQ U 1-4
DAC 1
DAC 2 INPUT FLAG S
A B C
4 ANALOG OU TPU TS. 16/18 BIT RESO LUTIO N
L D
FLAG CO NTROL ENCOD ER 1 OU TPUT FLAGS
E-MOTION
PMAC多轴运动控制卡
PMAC 卡PID调整的Parabalic 抛物线曲线分析
E-MOTION
PMAC多轴运动控制卡
数据采集
PMAC 已经内置数据获取能力称为数据采集功能.
需要学习:
什么数据可以被采集
如何进行数据采集 何时进行数据采集
NEW IDEAS IN MOTION
PMAC多轴运动控制卡
PMAC 卡PID调整的STEP 曲线分析
E-MOTION
PMAC多轴运动控制卡
PMAC 卡PID调整的STEP 曲线分析
E-MOTION
PMAC多轴运动控制卡
PMAC 卡PID调整的STEP 曲线分析
E-MOTION
PMAC多轴运动控制卡
PMAC 卡PID调整的Parabalic 抛物线曲线分析
. TB1 端子提供
. JMACH端子提供
NEW IDEAS IN MOTION
E-MOTION
PMAC多轴运动控制卡
PMAC 2 型卡接线
PMAC2 型卡可配接以下转接2路)
– ACC-8F : 直接PWM信号输出