基于EtherCAT的多轴运动控制器
基于EtherCAT总线的高速高精度多轴伺服运动控制器
【 关键词 】 E t h e r C A T;S T M3 2 ;高速高精度;运动控制器;数控 系 统
通过运行在工 控机上的上位机软件 ,上位机运行基 于P C 的
1 引 言
QT图形操 作系 统 ,可 以设 置运动 控制 参数 、实 时显示 加 工进
度 、 系 统 的运 行 状 态 。上 位 机 将 导 入 的C AD图 纸 读 取 后 , 转 化
E L E C T R ONI C S WOR L D・ 探素与观察
基{E t h e r C A T 总线的高速高精度多轴伺服运动控制器
广东工业大学 自 动化学院 栾 伟 易勇帆 王钦若
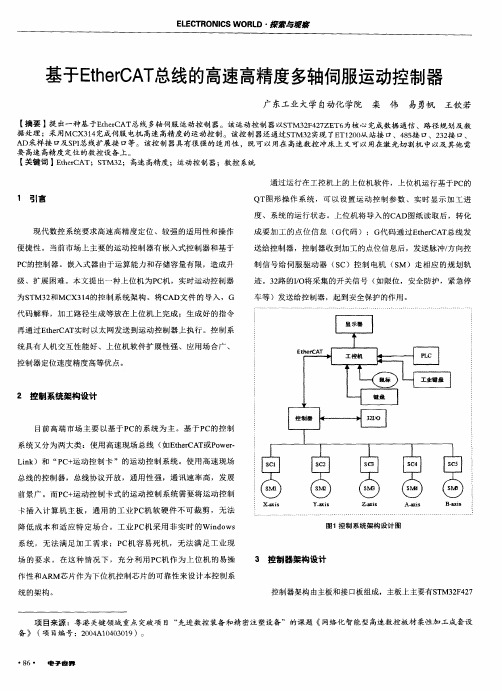
【 摘要 】 提 出一种基于E t h e r c A T 总线多轴伺服运动控 制器 。该运动控制 器 以s T M3 2 F 4 2 7 z E T 6 为核心 完成数 据通信 、路径 规划及数
・8 6・
t 皇子 啬 , -
作 为主 控 芯 片 ,MC X3 1 4 和MC X 5 0 1 作为 专用 的运 动控 制 芯片 ;主
w a i t ( 0 x 3 ) ;
控芯片与专用运动控制芯片之间通过F S MC 总线连接,对其读写命 令和数据 。主控板和接 口板通过接插件进行连接 。 接 口板上 主要 分布E T1 2 0 0 从 站通 讯模块 电路 , 电源转换 模 块 电路 ,信 号 隔离 模块 电路 ( 高速磁 耦 隔离 和低 速 光耦 隔 离 ),AD7 6 0 6 采样模块电路,2 3 2 / 4 8 5 通讯模块 电路等 。
据 处理 ;采 用Mc x3 1 4 完成伺服 电机 高速 高精度 的运 动控 制。该控制 器还通过 s T M3 2 实现 了E T1 2 o 0 从站接 口、4 8 5  ̄ - 口、2 3 2 接 口、 A D采样接 口及s P I 总线扩展接 口等 。该控 制器具有很强 的适 用性 ,既 可以用在 高速数控 冲床 上又可 以用在激光切 割机 中以及其他 需 要 高速 高精度定位的数控 设备上。
基于EtherCAT技术的多轴运动控制系统

基于EtherCAT技术的多轴运动控制系统张从鹏;赵康康【摘要】以EtherCAT通信技术为基础,设计了一种基于ARM和FPGA双核的EtherCAT总线式多轴运动控制系统.提出了STM32作为系统管理芯片,通过SPI通信控制ET1200从站控制芯片实现Eth-erCAT总线从站通信功能的解决方案;并采用FPGA作为协处理器,完成运动控制算法的实现和执行.完成了运动控制系统的硬件电路设计和软件开发,并制作了样机.经试验测试,实现了EtherCAT总线通信功能,采用TwinCAT完成了闭环运动控制,并且可以独立工作实现运动规划,满足工业控制工程中的应用要求.%An EtherCAT bus based multi axis motion control system was designed based on ARM and FPGA , after systemat-ically study on EtherCAT technology .The solution of main control chip STM 32 controlling ET1200 through SPI was presented .A motion control algorithm based on FPGA was developed .The specific hardware circuit and software of control system was de-signed, and a prototype was produced .The experiment demonstrates that the communication function of EtherCAT bus was real -ized, and the closed-loop motion control was completed by TwinCAT .Motion control system can work independently to achieve motion planning , meetting the application of industrial control in engineering .【期刊名称】《仪表技术与传感器》【年(卷),期】2017(000)001【总页数】5页(P115-118,122)【关键词】EtherCAT;多轴;STM32;运动控制;FPGA;插补算法;TwinCAT【作者】张从鹏;赵康康【作者单位】北方工业大学机械与材料工程学院,北京 100144;北方工业大学机械与材料工程学院,北京 100144【正文语种】中文【中图分类】TP23现代制造系统正朝着柔性化、开放化、网络化方向发展,覆盖多学科、多领域相关技术。
基于EtherCAT的多轴运动控制器
基于EtherCAT的多轴运动控制器蒋劲峰;张力;吕燕【摘要】针对工业运动控制中的实时性、稳定性等问题,提出了基于EtherCAT总线的多轴运动控制器.介绍了EtherCAT的技术原理和通信协议,并对多轴运动控制器的硬件构成、软件架构进行了详细说明,最后对该控制器在多轴控制平台上进行了验证,对时间抖动误差进行了测试.测试结果表明,该控制器具有良好的实时性和稳定性.【期刊名称】《上海电气技术》【年(卷),期】2016(009)003【总页数】4页(P44-47)【关键词】多轴运动;运动控制;EtherCAT总线;性能【作者】蒋劲峰;张力;吕燕【作者单位】上海电气集团股份有限公司中央研究院上海 200070;上海电气集团股份有限公司中央研究院上海 200070;上海电气集团股份有限公司中央研究院上海 200070【正文语种】中文【中图分类】TM921.02随着计算机技术和网络技术的快速发展,运动控制系统对实时性和网络化的要求越来越高,实时以太网通信技术因兼容性好、数据传输速度快、可靠性高等特点在工业控制领域得到了广泛的应用[1-5]。
目前,各大自动化厂商纷纷推出自己的实时以太网协议标准,如博世力士乐系统支持的SERCOS Ⅲ(串行实时)通信协议、倍福系统支持的EtherCAT(以太网控制自动化技术)通信协议、西门子系统支持的PROFINET(由PROFIBUS国际组织推出的总线标准)通信协议和贝加莱系统支持的Powerlink(开源实时通信技术)通信协议[6]等。
实时以太网技术已经成为控制网络发展的主要方向,被工业自动化系统广泛接受。
EtherCAT总线技术是德国倍福公司提出的实时工业以太网技术,在运动控制领域使用EtherCAT,在拓扑结构、时钟同步、数据传输速度和构建成本方面具有很大的优势。
笔者基于EtherCAT总线的通信原理,以计算机+赫优讯CIF-50通信板卡为控制器架构,介绍了多轴运动控制器软硬件的总体设计方案,并在实际运动控制中进行了性能验证。
基于EtherCAT总线的六轴工业机器人控制系统研究与开发

基于EtherCAT总线的六轴工业机器人控制系统研究与开发一、本文概述随着工业自动化技术的快速发展,工业机器人在生产线上的应用日益广泛。
作为工业机器人的核心组成部分,控制系统的性能直接决定了机器人的运动精度、稳定性和工作效率。
EtherCAT总线作为一种高性能的以太网现场总线技术,以其低延迟、高带宽和易扩展等特点,在工业控制领域得到了广泛应用。
本文旨在研究并开发一种基于EtherCAT总线的六轴工业机器人控制系统,以提高工业机器人的运动性能和控制精度,满足日益增长的自动化生产需求。
本文将首先介绍EtherCAT总线技术的基本原理和特点,分析其在工业机器人控制系统中的应用优势。
接着,将详细阐述六轴工业机器人的运动学模型和动力学特性,为控制系统的设计提供理论基础。
在此基础上,本文将重点研究控制系统的硬件架构和软件设计,包括EtherCAT主从站的选择与配置、运动控制算法的实现以及实时通信协议的优化等。
还将探讨控制系统的稳定性、可靠性和实时性等问题,以确保系统在实际应用中的稳定运行。
本文将通过实验验证所设计的控制系统的性能,并与传统控制系统进行对比分析。
实验结果将展示基于EtherCAT总线的六轴工业机器人控制系统在运动精度、响应速度和负载能力等方面的优势,为工业自动化领域的技术进步做出贡献。
二、EtherCAT总线技术EtherCAT(Ethernet for Control Automation Technology)是一种专为工业自动化领域设计的实时以太网通信协议。
它基于标准以太网技术,通过优化数据传输和同步机制,实现了高性能、低延迟的通信,特别适用于对实时性要求极高的工业控制系统中。
高速数据传输:EtherCAT协议支持高达100Mbps的数据传输速率,确保控制系统能够实时处理大量数据。
确定性延迟:通过优化网络结构和数据传输方式,EtherCAT实现了微秒级的确定性延迟,这对于精确控制工业机器人等应用至关重要。
ACS UDMsm 2或4轴 EtherCAT

2或4轴 EtherCAT ®通用驱动器模块产品亮点>先进的伺服控制算法,实现优异的运动性能>Servo Boost TM (选装配置)>MIMO龙门控制>级联双闭环控制>自定义算法 (联系ACS)>支持各种类型的电机和编码器,可实现优异的灵活性>具备SPiiPlus平台EtherCAT主站控制器的无缝集成>使用SPiiPlus MMI 应用软件套件进行简单的配置和调试>最大驱动电流:每轴5/10A >驱动电源输入: 12-48VdcUDMsm是基于EtherCAT驱动的通用驱动模块(UDM)系列的成员,旨在满足OEM制造商要求苛刻的多轴运动控制应用的需求。
UDMsm可通过ACS SPi i Plus平台EtherCAT主机控制,利用强大的伺服控制算法来大幅度提升运动系统的性能,同时,UDM sm 通用的伺服驱动技术能让驱动系统设计人员灵活地控制大多数类型的电机或平台。
>反馈通道: 4 (AqB, SinCos,或绝对编码器)>模拟 I/O: 2/2>用于将传感器数据集成到自定义伺服算法的SPI接口>数字 I/O: 12/16>任何一种都可以用于一般用途。
>4个高速位置捕获(MARK)输入>8 限位传感器输入 (每轴2)> 4 制动输出功率>4个高速位置事件生成(PEG)输出>8 通用输出>功能安全:STO, SS1特性逻辑电源输入电压范围: 24 Vdc ±5%最大输入电流:**********保护:反极性驱动电源输入电压范围: 12-48 Vdc最大输入电流:与负载有关再生电阻器:不包括在内放大器轴数量: 2 或4类型:三相功率桥电机支持>直流有刷>音圈>2相和3相直流无刷>2相和3相步进:开环或闭环,每步高达1024微步,动态电流调整输出电流每轴连续值/峰值(正弦幅度):1.25/2.5 A,2.5/5 A,5/10 A峰值电流时间:1秒PWM开关频率:20 kHz最小负载电感:母线在48Vdc时,每相25uH(有关相电感比较低的电机的应用,请联系ACS)最大输出电压:驱动电源输入电压的92%每轴最大输出连续值/峰值功率:187/364 WEtherCAT保护:短路保护、过流保护、驱动过温保护、电机过温保护、过压保护、欠压保护接口: 双 RJ-45, 100BASE-TX通信配置文件:SPiiPlus平台专有报文协议最大周期频率:4 kHz其他通信接口SPI:8字(16位/字),4 MHz双向主/从接口,用于自定义伺服算法的数据输入/输出伺服系统控制算法标准>具有环路整形滤波器的级联PIVFF>高级前馈>多输入多输出(MIMO)龙门>双闭环>抗干扰>增益规划>磁场定向控制>空间矢量脉宽调制选装配置>定制算法以满足特殊应用的需求(联系ACS)>伺服采样速率和更新速率:20 kHz位置、20 kHz速度、20 kHz电流数字I/O(均可用作通用)总数量: 12/16高速位置捕获(MARK)输入>数量: 4>电接口: 5/24V ±20%, 光隔离接口,两个终端>最大捕获频率: 2 kHz限位传感器输入>数量: 8 (有关更多详细信息,请参阅反馈部分)高速位置事件生成(PEG)输出>数量: 4>电接口: RS-422>最大脉冲频率: 10 MHz>脉宽可调范围: 27 ns to 1.745 ms制动输出功率>数量: 4>电接口: 5/24V ±20%,光隔离接口, 漏型或源型(选择跨接器)>输出电流: 100 mA输出电流: 100 mA通用输出>数量: 8>最大更新频率: 4 kHz>电接口: RS-422反馈通道总数: 4增量>AqB编码器(默认类型)>最大频率: 50 MHz>电接口: RS-422>错误检测:编码器未连接,非法转换>SinCos 编码器/ 模拟霍尔传感器 (选装配置)>最大频率: 500 kHz or 10 MHz, 根据订购选项>电接口: 1 V 峰到峰/-10%>最大倍增:4096(每个完整信号周期)>错误检测: 未连接>补偿:相位、增益、失调。
基于EtherCAT总线的六轴工业机器人控制系统研究与开发

控制系统的设计
基于EtherCAT总线的六轴工业机器人控制系统设计需要考虑硬件和软件两个 方面。
硬件方面,控制器选用具备EtherCAT总线接口的工业计算机,以实现高速通 信。伺服电机选用支持EtherCAT协议的伺服驱动器,以确保通信的稳定性和可靠 性。传感器则根据需要选择相应的类型,如编码器、光栅尺等。
软件方面,控制系统的核心是EtherCAT从站软件的编写。从站软件负责与机 器人控制器通信,接收控制指令,并将指令转化为相应的关节角度输出给伺服电 机。同时,从站软件还需接收传感器的反馈数据,将数据上传给控制器。在编写 从站软件时,需要针对特定的机器人模型进行运动学和动力学建模,以确保控制 的精确性。
背景
六轴工业机器人控制系统通常由机器人控制器、伺服电机、传感器等组成。 控制器根据机器人的运动学模型和目标位置,计算出相应的关节角度,通过伺服 电机驱动机器人运动。同时,传感器实时监测机器人的位置、速度等参数,为控 制器提供反馈信息。随着以太网通信技术的不断发展,EtherCAT总线作为一种高 速、实时、串行通信协议,逐渐应用于工业机器人控制系统中。
关键技术实现
在基于EtherCAT总线的焊接机器人控制系统中,关键技术的实现是至关重要 的。首先,我们通过优化数据传输协议,实现了高速、可靠的数据传输,提高了 系统的实时性。其次,我们采用多线程技术,实现了焊接机器人多个运动轴的实 时协同控制。此外,我们还利用硬件加速技术,提高了焊接机器人的运动控制精 度和响应速度。
5、结论与展望
本次演示成功地研究和实现了六轴工业机器人的控制系统,通过优化运动学 和动力学模型以及采用合适的控制策略,提高了机器人的运动性能、稳定性和精 度。然而,仍有一些问题需要进一步研究和改进,如复杂环境下的轨迹跟踪误差 和振动问题等。
基于EtherCAT技术的多轴运动控制系统
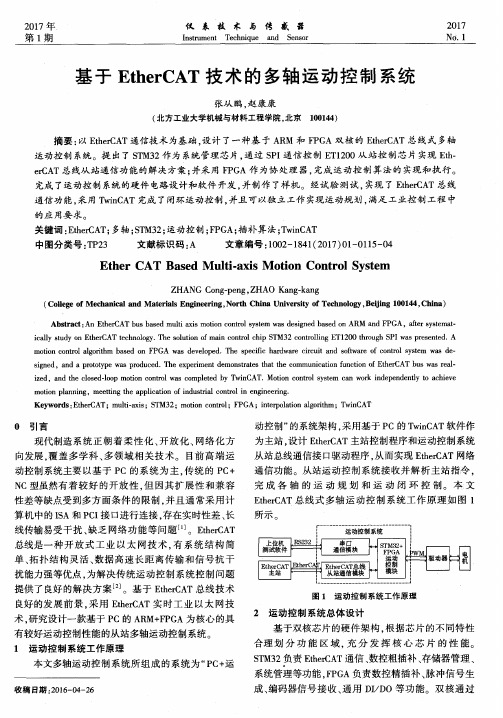
( 北方工业大学机械 与材料 工程学院 , 北京 1 0 0 1 4 4 )
摘要 : 以E t h e r C A T通信 技 术为基 础 , 设计 了一 种基 于 A R M和 F P G A 双核 的 E t h e A T总 线 式 多轴
泓格科技股份有限公司 EtherCAT 4軸步進馬達控制器 驅動器 使用手冊说明书
ECAT-2094SEtherCAT4軸步進馬達控制器/驅動器使用手冊(Version 1.3.1)承諾鄭重承諾: 凡泓格科技股份有限公司產品從購買後,開始享有一年保固,除人為使用不當的因素除外。
責任聲明凡使用本系列產品除產品品質所造成的損害,泓格科技股份有限公司不承擔任何的法律責任。
泓格科技股份有限公司有義務提供本系列產品詳細使用資料,本使用手冊所提及的產品規格或相關資訊,泓格科技保留所有修訂之權利,本使用手冊所提及之產品規格或相關資訊有任何修改或變更時,恕不另行通知,本產品不承擔使用者非法利用資料對第三方所造成侵害構成的法律責任,未事先經由泓格科技書面允許,不得以任何形式複製、修改、轉載、傳送或出版使用手冊內容。
版權版權所有 © 2017 泓格科技股份有限公司,保留所有權利。
商標文件中所涉及所有公司的商標,商標名稱及產品名稱分別屬於該商標或名稱的擁有者所持有。
聯繫我們如有任何問題歡迎聯繫我們,我們將會為您提供完善的咨詢服務。
Email:******************,************************修訂紀錄版本日期說明Author 1.00 05.09.2018 初始版本M.K. 1.0.1 13.05.2020 更新規格M.K.M.K. 1.0.2 19.05.2020 修改馬達電源的連接介面說明(表格 5)修改供貨範圍M.K. 1.2.0 16.09.2020 •加減速單位與類型•錯誤列表•供應商專用暫存器•修改馬達電壓範圍M.K. 1.2.1 25.01.2021 •更新 "開路集極接線圖"•加速/減速單位:▪增加 "current to target"▪更新V-T圖形•更新錯誤表•增加"Target overrun"•增加相對位置的動態變化範例M.K 1.2.2 20.07.2021 •韌體版本 1.6•增加以下物件:▪Target overrun▪Initialization errorEric Chen 1.3.0 25.05.2022 •硬體變更,增加下列功能:▪別名旋鈕定址▪透過FoE更新韌體•韌體版本2.0•增加" Station Alias"1.3.1 10.03.2023 •修改連接介面的PGND標示Eric ChenContents1 產品概述 (3)1.1 簡介 (3)1.2 技術數據 (4)1.3 硬體規格 (5)1.4 外型尺寸 (6)2 供貨範圍 (7)3 接線 (9)3.1 LED燈定義 (9)3.2 旋鈕定義 (11)3.3 連接介面 (11)3.4 數位輸入與輸出接線 (14)3.5 步進馬達接線 (17)3.5.1 四線式馬達 (17)3.5.2 八線式馬達 (18)3.5.3 編碼器接線 (19)4 基礎通訊 (21)4.1 EtherCAT 佈線 (21)4.2 狀態機 (21)4.3 同步模式 (23)4.3.1 自由運行模式 (23)4.3.2 DC同步模式 (24)5 專案整合 (27)5.1 ESI 檔案 (27)5.1.1 匯入 ESI檔案 (27)5.2 安裝與設定 (28)5.2.1 掃描EtherCAT裝置 (28)5.2.2 EtherCAT從站進程數據設定 (30)5.2.3 基本步進驅動器配置 (31)5.3 更新韌體 (33)6 位置控制設定 (35)6.1 位置介面類型 (35)6.2 Positioning Interface (35)6.2.1 加減速單位定義 (44)6.2.1.1 從Vmin 到 Vmax的加速時間 (45)6.2.1.2 從Vmin 到 Vtarget的加速時間 (46)6.2.1.3 加速度 [128*微步/秒2] (48)6.2.1.4 從Vcurrent 到 Vtarget的加速時間 (49)6.2.2 加速度/減速度類型 (50)6.2.2.1 Start-Stop Phase Type (50)6.2.2.2 Standard Acceleration/Deceleration (52)6.3 Positioning Interface Compact (52)6.4 Position Control (57)7速度控制設定 (61)8 CoE介面 (64)8.1 概述 (64)8.2 儲存設置數據到記憶體 (65)8.3 驅動器調適 (68)9物件描述與參數化 (70)9.1 標準物件 (70)9.2 RxPDO Mapping Objects (71)9.3 TxPDO Mapping Objects (73)9.4 Sync Manager Objects (78)9.5 Input Data (82)9.6 Output Data (84)9.7 Configuration Data (87)9.8 Driver Tuning Functions (92)9.9 Information and Diagnostic Data (93)9.10 Configuration Parameters Storage (94)9.11 Station alias Configuration (95)10 錯誤列表 (96)11 供應商特定暫存器定義 (96)1產品概述1.1簡介ECAT-2094S步進馬達控制器是一款高效且經濟實惠的兩相雙極步進驅動器,可同時控制最多4個步進馬達。
基于EtherCAT总线的六轴工业机器人控制系统研究与开发共3篇

基于EtherCAT总线的六轴工业机器人控制系统研究与开发共3篇基于EtherCAT总线的六轴工业机器人控制系统研究与开发1EtherCAT是一种高速实时工业以太网协议,可以用于控制和监测工业机器人。
本文将讨论基于EtherCAT总线的六轴工业机器人控制系统的研究和开发。
首先,我们需要了解六轴工业机器人的基本结构和运动方式。
六轴机器人包括基座、腰、肘、腕、手和末端执行器。
每个关节的运动由电机驱动,可以精确地控制机械臂的位置、速度和加速度。
然后,我们需要了解EtherCAT总线的基本工作原理。
EtherCAT总线的一个主要特点是其高速实时通讯。
数据可以在2毫秒内传输到所有的从站,从站可以很快地响应主站的指令。
这使得EtherCAT总线非常适合实时控制和数据采集应用。
基于以上的理解,我们可以开始设计一个基于EtherCAT总线的六轴工业机器人控制系统。
在这个系统中,我们需要将主站和所有的从站连接到EtherCAT总线上。
主站负责发送指令到从站,从站在接收到指令后驱动机器人的电机运动。
从站还可以向主站发送数据,如传感器数据、电机位置等信息。
我们可以使用一个现有的EtherCAT控制器,如Beckhoff的EtherCAT 控制器,来管理EtherCAT总线上的主站和从站。
我们还需要编写机器人控制软件以将指令发送到从站,并处理从站返回的数据。
这可以使用高级编程语言,如C++或Python完成。
在此之后,我们需要将控制软件和机器人的硬件连接起来。
我们需要连接控制器和电机驱动器,以便从控制器发送指令到电机驱动器。
电机驱动器可以将指令转换成电机运动,并监测电机位置和速度,并将这些数据发送回从站。
从站可以将这些数据传输到主站,以进行控制和监测。
最后,我们可以测试六轴工业机器人控制系统的性能。
我们可以使用编写的控制软件向机器人发送指令,并记录电机的位置、速度和加速度。
我们还可以使用传感器采集机器人的状态数据,并将其与控制软件的指令进行比较。
EtherCAT总线式多轴运动控制器开发

EtherCAT总线式多轴运动控制器开发EtherCAT(以太网通信技术)是一种高性能、实时性强的工业以太网通信协议,广泛应用于工业自动化领域。
而多轴运动控制器是工业自动化中的关键设备,用于控制多个运动轴的运动轨迹和速度。
本文将介绍EtherCAT总线式多轴运动控制器的开发。
首先,EtherCAT总线式多轴运动控制器的开发需要硬件和软件两个方面的支持。
硬件方面,需要设计和制造一套适配EtherCAT通信协议的电路板,其中包括EtherCAT总线接口电路、多轴伺服驱动器接口电路和运动控制器芯片等。
软件方面,需要开发控制器的固件和上位机软件,实现运动轨迹的规划、速度控制和实时监控等功能。
其次,EtherCAT总线式多轴运动控制器的开发需要遵循一定的设计原则。
首先是实时性要求,由于工业自动化中对运动控制的实时性要求较高,因此控制器的响应速度和数据传输速度都需要达到一定的要求。
其次是稳定性要求,控制器需要具备较高的抗干扰能力,能够在复杂的工业环境下稳定运行。
此外,还需要考虑控制器的可扩展性和可靠性,以满足不同应用场景的需求。
在开发过程中,可以采用模块化的设计方法,将控制器的功能划分为不同的模块,每个模块负责一个特定的功能。
通过模块化设计,可以提高开发效率和代码重用率。
同时,可以采用现有的开发工具和开发平台,如C/C++语言、EtherCAT开发工具包等,以加快开发进度和提高开发质量。
最后,开发完成后,需要进行严格的测试和验证,确保控制器的功能和性能符合设计要求。
测试可以包括功能测试、性能测试和可靠性测试等。
通过测试,可以发现和修复潜在的问题,提高控制器的稳定性和可靠性。
综上所述,EtherCAT总线式多轴运动控制器的开发是一项复杂而关键的工作。
它需要硬件和软件的协同支持,遵循一定的设计原则,并经过严格的测试和验证。
通过开发这样的控制器,可以实现工业自动化领域对于多轴运动控制的要求,提高生产效率和产品质量。
基于EtherCAT的多轴运动控制系统设计
第2期2017年2月组合机床与自动化加工技术Modular Machine Tool & Automatic Manufacturing TechniqueNo. 2Feb. 2017文章编号:1001 -2265(2017)02 -0068 -05D 01:10.13462/j. cnki. mmtamt. 2017. 02. 017基于EtherCAT 的多轴运动控制系统设计+谢锴,颜钢锋(浙江大学电气工程学院,杭州310027)摘要:针对多轴控制系统中的同步性问题,设计了一款基于EtherCA T 的多轴运动控制系统,并提出 了对主站和从站均采用实时操作系统的解决方案。
对于EtherCAT 主站,在嵌入式平台上,构建了基 于Xenomai-Linux 和E therlab 的主站方案,人机界面使用Q t 来编写,EtherCAT 从站采用的是uC/OS-III 实时操作系统,通过抢占式内核保证了从站之间的数据实时性。
通过主从站的双实时设计方案,保证了系统中多轴之间的同步性。
实验结果表明,基于双实时操作系统的EtherCAT 运动控制系统, 连接便利,同步时间在微秒级别,具有很好的实时性。
关键词:实时以太网E therC A T ; AR M ;X e n o m a i-L in u x ;uC /O S -III ; Q t ;多轴运动控制系统 中图分类号:T H 166 ;TG 659文献标识码:ADesign of Motion Control System Based on EtherCATX IE K a i,Y A N Gang-feng(C ollege of E lectrical E ngineer , Zhejiang U n ive rsity , Hangzhou 310027, C hina )Abstract : For the shortages o f current m u lti-a xis m otion control system in synchronization and the control a b ility , a m u lti-a xis m otion control system based on E therC A T is designed . The m aster station and slave sta tio n are constructed using real-tim e operating system . A solution o f b u ild in g embedded E therC A T m aster is presented , w hich uses Ig H E therC A T M aster open source components fo r R T -L in u x , and Q t fo r G U I . The slave o f this system is based on uC /O S -III operating system , w hich uses preem ptive kernel to guarantee the real-tim e data among slaves . T hus , this system can ensure the synchronization among m u lti -axis . The results shows th a t , the m u lti-a xis m otion control system based on E therC A T has a fa cilita te connection and the syn chronization tim e is at m icrosecond le v e l , w hich can meet the requirem ent o f real-tim e and synchronization .Key words : E th e rC A T ; A R M ; X enom ai -L in u x ; uC /OS -I I I ; Q t ; servo m otion control system〇刖目在传统的数控加工设备,工业机器人和机电一体 化中,信号传输主要使用的是电缆或者光纤,由于传输 介质的特点,使得多轴在进行协调工作时,存在一定的 不同步性,从而影响工业加工的精度,并且传统系统构 成比较复杂,成本比较高,维护比较困难。
基于EtherCAT的分布式运动控制系统设计
二、背景
随着工业自动化技术的不断发展,运动控制系统在越来越多的领域得到应用。 然而,传统的运动控制系统存在一些问题,如稳定性不足、实时性差、扩展性 不强等。为了解决这些问题,基于EtherCAT技术的运动控制系统应运而生。 EtherCAT协议通过以太网实现高速数据传输,具有高精度、低延迟、易于扩 展等优点,为现代工业控制系统的应用提供了新的解决方案。
基于EtherCAT的分布式运动 控制系统设计
01 引言
目录
02 系统设计
03 运动控制模块设计
04 系统实验及结果分析
05 结论与展望
06 参考内容
引言
随着工业自动化的不断发展,运动控制系统在各种领域中的应用越来越广泛。 EtherCAT作为一种先进的实时以太网通信协议,具有高速高精度、低延迟、 高可靠性等优点,为分布式运动控制系统提供了良好的解决方案。本次演示将 基于EtherCAT的分布式运动控制系统设计进行探讨。
我们也将运动控制技术的最新进展,以不断推动多轴网络运动控制系统的发展。 另外,我们还将努力优化系统的稳定性和精度,以适应更高要求的生产环境。
总之,基于实时以太网EtherCAT的多轴网络运动控制系统是一种创新性的设 计方案,具有高效、稳定、精准的特点。本研究的成功实施不仅提升了运动控 制系统的整体性能,也有助于推动工业自动化领域的进步。我们期待这一技术 在未来的实际应用中发挥更大的作用,为现代工业生产带来更大的效益。
三、研究方法
本次演示对基于Linux平台的EtherCAT运动控制系统进行研究。首先,通过对 系统需求进行分析,确定系统的基本架构和功能模块。接着,进行系统设计, 包括硬件选型、软件编程、系统调试等环节。最后,实施实验,对系统的稳定 性、实时性和数据传输率进行测试和评估。
经济型EtherCAT运动控制器:示波器使用
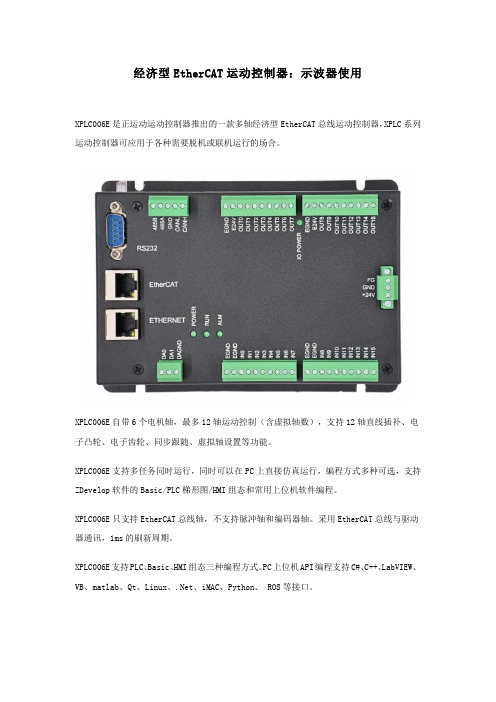
经济型EtherCAT运动控制器:示波器使用XPLC006E是正运动运动控制器推出的一款多轴经济型EtherCAT总线运动控制器,XPLC系列运动控制器可应用于各种需要脱机或联机运行的场合。
XPLC006E自带6个电机轴,最多12轴运动控制(含虚拟轴数),支持12轴直线插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等功能。
XPLC006E支持多任务同时运行,同时可以在PC上直接仿真运行,编程方式多种可选,支持ZDevelop软件的Basic/PLC梯形图/HMI组态和常用上位机软件编程。
XPLC006E只支持EtherCAT总线轴,不支持脉冲轴和编码器轴。
采用EtherCAT总线与驱动器通讯,1ms的刷新周期。
XPLC006E支持PLC、Basic、HMI组态三种编程方式。
PC上位机API编程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
→此款产品有XPLC004E、XPLC006E、XPLC008E三个不同轴数的型号可选。
XPLC864E在XPLC006E的功能基础上做了升级(即上节介绍的XPLC006E的功能都支持),部分资源空间优于XPLC006E,使用方法基本一致,不同之处在于XPLC864E,硬件支持32点输入、32点输出、2个ADC、2个DAC,支持脉冲轴和总线轴混合使用,总实轴轴数为8,除了带EtherCAT接口之外,输出口硬件上可配置为8个轴的脉冲方向信号输出,另带两路编码器输入,可由输入口配置。
XPLC864E支持PLC、Basic、HMI组态三种编程方式。
PC上位机API编程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
XPLC系列经济型EtherCAT总线运动控制器支持多种编程方式,支持使用正运动技术自主研发的ZDevelop开发环境的Basic语言和PLC梯形图,上一节讲解了控制器的轴参数与运动指令说明,本节内容主要讲解控制器的示波器使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
含义 接收方MAC地址 发送方MAC地址
0x88A4 数据区长度,即子报文长度加和 1,代表与从站通信,其余保留
循环冗余校验和
EtherCAT没有重新定义新的以太网帧结构,而是在 标准以太网帧结构中使用了一个特殊的以太网帧类型 0x88A4,采用这种方式可以使控制数据 直接写入以太网 帧内,并且可以与遵守其它协议的以太网帧在同一网络 中并行。一个EtherCAT帧中可以包含若干个EtherCAT子 报文,报文结构如图3,各部分含义见表2,每个报文都 服务于一块逻辑过程映像区的特定内存区域,由FMMU (Fieldbus Memory Management Unit,负责逻辑地址与 物理地址的映射)寄存器和SM(Sync Manager,负责对 ESC和微处理器内存的读写)寄存器定义,该区域最大可 达4GB字节。EtherCAT报文由一个16位的 WKC(Working Count)结束,其数据区最大长度可达1486 个字节。在报文头中由8位命令区数据决定主站对从站的 寻址方式,由于数据链独立于物理顺序,因此可以对 EtherCAT从站进行任意的编址。
现场总线)是德国BECKHOFF公
司提出的实时工业以太网技术.
•
它基于标准的以太网技术,具
备灵活的网络拓扑结构,系统配置
简单,具有高速、高有效数据率等
特点,其有效数据率可达90%以上.
EtherCAT产品
1.1 EtherCAT系统组成和工作原理
• EtherCAT采用主从式结构, • 主站PC机采用标准的100Base-TX以太网卡, • 从站采用专用芯片。 • 系统控制周期由主站发起,主站发出下行电报.数
• 从站控制器与主站交换两种形式的数据,
• 一种是周期性数据,
• 一种是非周期性数据,
•
周期性数据传输可以采用缓冲区方式,任何一方在任何时间都可以访问此方式定义内存,得到最新数据;•
非周期性数据传输采用握手方式(邮箱方式)实现,一方写入
数据到定义的内存,只有完成定义内存的最后一个字节的写入,另一
方才能开始从定义内存中读出数据,而且只有在读出定义内存的最后
1.2 EtherCAT数据帧结构
• EtherCAT以标准以太网技术为基础,在MAC(媒 体访问层)增加了一个确定性调度的软件层,该 软件层实现了通信周期内的数据帧的传输。 EtherCAT采用标准的IEEE802.3以太网帧,帧结 构如图2,各部分含义见表1:
名称 目的地址
源地址 以太类型 EtherCAT头:长度 EtherCAT头:类型
一个字节数据后,才能重新写入数据。
3.1系统概述
• 一个EtherCAT主站通过EtherCAT协议 可以连接若干从站运动控制器单元。
• 一个运动控制器单元由从站控制底板、 通信卡和1~8块运动控制卡组成。
•
每个运动控制卡控制一个伺服轴。
3.2 数据通信
• 本系统在应用层自定义了数据模块结构,模块数 据分为两种:
名称 命令 索引号 子报文地址 长度
M 状态位 数据区
WKC
含义 寻址方式及读写方式
帧编码代号 从站地址 报文数据区长度 此报文后是否还有报文? 中断到来标志 子报文数据结构,用户定义 Working Count,工作计数器,报文寻址次数
2.1 EtherCAT主站的实现
• EtherCAT技术在主站方面只需在一块标准 的NIC网卡,主站功能完全由软件实现。
据帧遍历所有从站设备,每个设备在数据帧经过 时分析寻址到本机的报文,根据报文头中的命令 读入数据或写入数据到报文中指定位置,并且从 站硬件把该报文的工作计数器(WKC)加1,表 示该数据被处理。
应用范围广泛
EtherCAT支持几乎所有的拓扑类型,包括线型、树型、 星型等,其在物理层可使用100BASE-TX双绞线、100BASEFX光纤或者 LVDS(Low Voltage Differential Signaling, 即低 压差分信号传输),还可以通过交换机或介质转换器实现不 同以太网布线的结合。
基于EtherCAT的多轴运动控制 器
1
EtherCAT技术介绍
2
EtherCAT技术的实现
3
EtherCAT伺服控制器原理
概述
•
由于以太网通信速度快、数
据量大等特点使运动控制性能得到
了极大的提升。EtherCAT
(Ethernet for Control Automation
Technology)技术(也称为以太网
• EtherCAT可以用一个以太网帧发送1486字 节的有效数据,所以在通常情况下,每个 通信周期只需要一个或两个帧就能完成所 有结点的全部通信。
EtherCAT主站程序应该包含以下几 个方面:
• (1) 读取XML配置文件,根据配置文件信 息构造主站与从站设备;
• (2) 管理EtherCAT从站,发送配置文件中 定义的初始化帧,初始化从站,为通信做准备;
• 一种是指令数据模块,由主站写给从站,控制伺 服运动。
• 一种是状态数据模块,主站从从站读取,表示伺 服轴状态反馈。
• 一个运动控制卡使用一个指令数据模块和一个状 态数据模块,每个EtherCAT子报文由从站上的所 有运动控制卡的数据模块组成,如下图所示。
每个数据模块包含10个字节,指令数据模块分别定义为数据模块头、控制字 和指令数据区,状态数据模块分别定义为数据模块头、状态字和状态数据区。
结论
• 本次介绍了一种基于实时工业以太网协议 EtherCAT的多轴运动控制器。每个运动控 制器单元可以最多控制8个伺服轴,每个伺 服轴可以进行位置、速度、回参考点等控 制。通过这种多轴运动控制器可以在数控 设备和工业机器人控制系统中利用 EtherCAT技术,提高控制性能。
• (3) 使用邮箱操作实现非周期性数据传输, 配置系统参数,处理通信过程中某些偶然性事件;
• (4) 实现过程数据通信,完成主站与从站 之间的实时数据交换,达到主站控制从站运行, 并处理从站实时状态的功能。
2.2 EtherCAT从站的实现
• 可以利用BECKHOFF公司开发的从站控制器ESC(EtherCAT Slave Controller)根据实际需要设计从站设备。从站硬件示意图如图5。