位错的弹性理论、计算方法和主要内容
2.4 位错的弹性性质
2.4 位错的弹性性质位错的弹性性质是位错理论的核心与基础。
它考虑的是位错在晶体中引起的畸变的分布及其能量变化。
处理位错的弹性性质有若干种方法,主要的有:连续介质方法、点阵离散方法等。
从理论发展和取得的效果来看,连续介质模型发展得比较成熟。
我们仅介绍位错连续介质模型考虑问题的方法和计算结果,详细的数学推导不作介绍,有兴趣的同学可进一步阅读教学参考书。
一、位错的连续介质模型早在1907年,伏特拉(Volterra)等在研究弹性体形变时,提出了连续介质模型。
位错理论提出来后,人们借用它来处理位错的长程弹性性质问题。
1.位错的连续介质模型基本思想将位错分为位错心和位错心以外两部分。
在位错中心附近,因为畸变严重,要直接考虑晶体结构和原子间的相互作用。
问题变得非常复杂,因而,在处理位错的能量分布时,将这一部分忽略。
在远离位错中心的区域,畸变较小,可视作弹性变形区,简化为连续介质。
用线性弹性理论处理。
即位错畸变能可以通过弹性应力场和应变的形式表达出来。
对此,我们仅作一般性的了解。
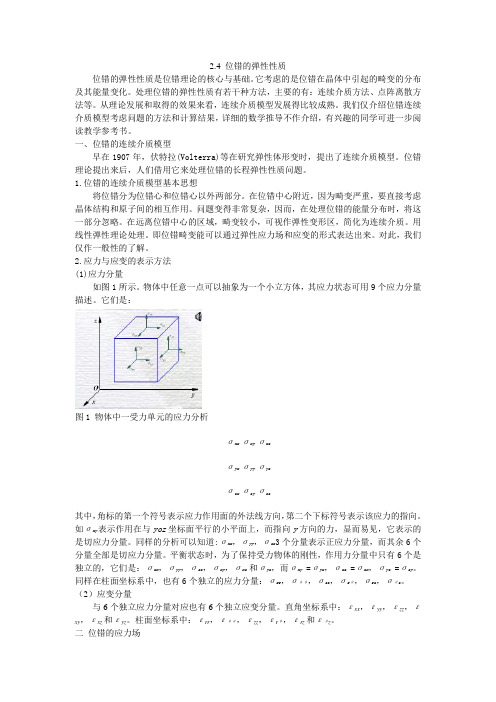
2.应力与应变的表示方法(1)应力分量如图1所示。
物体中任意一点可以抽象为一个小立方体,其应力状态可用9个应力分量描述。
它们是:图1 物体中一受力单元的应力分析σxx σxy σxzσyx σyy σyzσzx σzy σzz其中,角标的第一个符号表示应力作用面的外法线方向,第二个下标符号表示该应力的指向。
如σxy表示作用在与yoz坐标面平行的小平面上,而指向y方向的力,显而易见,它表示的是切应力分量。
同样的分析可以知道:σxx,σyy,σzz3个分量表示正应力分量,而其余6个分量全部是切应力分量。
平衡状态时,为了保持受力物体的刚性,作用力分量中只有6个是独立的,它们是:σxx,σyy,σzz,σxy,σxz和σyz,而σxy =σyx,σxz =σzx,σyz =σzy。
同样在柱面坐标系中,也有6个独立的应力分量:σrr,σθθ,σzz,σrθ,σrz,σθz。
位错受力大小计算

位错受力大小的计算方法及其影响一、引言位错是晶体中出现的线性缺陷,对材料的力学性能和变形行为具有重要影响。
为了深入理解位错的性质和行为,我们需要研究位错受力的大小及其影响因素。
本文将详细介绍位错受力大小的计算方法,并分析位错受力对材料性能的影响,以期为相关研究和应用提供参考。
二、位错受力的基本概念位错受力是指晶体中的位错在受到外力作用时所产生的力。
根据位错的类型和晶体结构的不同,位错受力的大小和方向也会有所不同。
位错受力的大小可以通过实验测定或理论计算得到,是研究位错行为和材料性能的重要手段。
三、位错受力大小的计算方法1. 弹性理论计算法:弹性理论计算法是一种基于弹性力学理论的计算方法,可以用来预测位错受力的大小。
该方法通过求解晶体中位错的应力场和位移场,得到位错受力的大小和方向。
这种方法适用于简单晶体结构和规则位错的情况,可以得到较为准确的结果。
2. 原子模拟法:原子模拟法是一种基于计算机模拟的计算方法,可以用来模拟晶体中位错的行为和受力情况。
该方法通过建立晶体和位错的原子模型,运用分子动力学或蒙特卡罗等方法进行模拟计算,得到位错受力的大小和方向。
这种方法适用于复杂晶体结构和不规则位错的情况,可以得到较为详细的结果。
3. 实验测定法:实验测定法是一种直接测定位错受力大小的方法,可以通过对晶体施加外力并观察位错的移动情况来测定位错受力的大小。
该方法需要使用高分辨率显微镜或电子显微镜等设备进行观察,可以得到较为直观的结果。
四、位错受力对材料性能的影响1. 强度:位错受力对材料的强度具有重要影响。
当晶体中存在大量位错时,位错之间的相互作用会导致晶体强度的增加。
但是,如果位错密度过高,会导致晶体变形不均匀,从而降低材料的强度。
因此,在位错密度的控制上需要寻求平衡。
2. 塑性:位错受力对材料的塑性也有重要影响。
当晶体受到外力作用时,位错的移动会导致晶体的塑性变形。
如果位错移动受到阻碍,会导致晶体出现脆性断裂。
位错环半径

位错环半径位错环半径是晶体学中的一个重要概念,它描述了在晶体中由于晶格畸变而产生的位错的尺寸。
位错是晶体中的一种基本缺陷,它们是由于晶格原子排列的不规则性而引起的。
位错的存在对晶体的力学性能、电学性能和光学性能等方面具有重要影响。
因此,研究位错环半径对于理解晶体中的缺陷行为以及设计和优化材料的性能具有重要意义。
一、位错的基本概念1. 位错的定义:位错是晶体中原子排列不规则的区域,它是由于晶格畸变而产生的一种基本缺陷。
位错可以分为刃型位错、螺型位错和混合型位错等类型。
2. 位错的性质:位错具有以下性质:(1)位错具有滑移特性,即在一定条件下,位错可以在晶体中滑移,从而改变晶体的形状和尺寸。
(2)位错具有弹性应力集中效应,即在位错附近,晶体的应力会显著增大。
(3)位错具有能量,这种能量称为位错能。
位错能的大小与位错的长度、形状和类型等因素有关。
二、位错环的形成1. 位错环的定义:位错环是由两个或多个平行的位错相互靠近并相互作用而形成的一个封闭的位错区域。
位错环的形状可以是圆形、椭圆形或其他多边形。
2. 位错环的形成条件:位错环的形成需要满足以下条件:(1)位错之间的相互作用力要大于它们之间的排斥力。
(2)位错的运动速度要足够快,以便在它们相互靠近之前形成稳定的位错环。
(3)晶体中的杂质和缺陷密度要适中,以免影响位错环的稳定性。
三、位错环半径的计算1. 位错环半径的定义:位错环半径是指从位错环的中心到其最外层原子的距离。
它反映了位错环的大小和形状。
2. 位错环半径的计算方法:根据晶体学理论,可以通过求解晶体中的弹性方程来计算位错环半径。
具体步骤如下:(1)假设位错环是一个圆,其半径为r,圆心位于原点O。
(2)将晶体中的原子坐标代入弹性方程,得到关于原子坐标的非线性方程组。
(3)求解非线性方程组,得到原子坐标的最优解。
(4)根据原子坐标的最优解,计算得到位错环的半径r。
需要注意的是,这种方法只适用于简单的几何形状和边界条件的位错环。
位错的弹性性质
(2) 位错的应变能
位错附近的原子离开了正常的平衡位置,使点 阵发生了畸变,导致晶体的能量增加,增加的能量 称为畸变能或应变能。其包括位错中心区域的应变 能和位错应力场引起的弹性应变能。
其中位错中心区域点阵畸变很大,不能用线弹 性理论计算其弹性应变能。据估计,这部分能量大 约占总应变能的10%左右,故通常予以忽略。
0 L r0 4 r
(1) 单位长度螺型位错的弹性应变能Ws为:
Ws
W L
s
Gb2
4
ln
R r0
(2) 刃位错的弹性应变能计算较复杂,其单位长 度刃位错的弹性应变能WE为:
WE
W L
E
Gb2
4 1
ln
R r0
(3) 混合位错的弹性应变能等于螺位错的弹性能和 刃位错的弹性能之和。
r0为位错中心区域的半径,可取 r0 b 2.5108cm R为位错应力场的最大作用半径,在实际晶体中 受亚晶的限制,可取 R 104cm ,则单位长度位 错的应变能为:
3.2.3 位错的弹性性质
晶体中有位错存在时,位错线及其周围的晶格 产生严重畸变,畸变处的晶体原子偏离平衡位置, 能量增高。位错线及其周围区域产生弹性应变和应 力场。
采用弹性力学方法来分析位错线周围的应力分 布,所得结果不适于位错中心区(中心区的原子排 列特别紊乱,既不能看成连续介质,也不是小位移, 超出了弹性变形的范围,因此,虎克定律不再适 用),它只适于位错中心区以外的区域(直到无穷 远处)。
形成刃位错时没有轴向位移,只有径向位移, 因而位移是二维的(平面应变)。但刃位错应力场 比螺位错复杂,此处不加讨论。其最后结果如下:
xx
D
y 3x2 x2
y2 y2 2
《材料成型金属学》教学资料:1-4 位错的应力场和应变能
(4)当y=0时,σxx=σyy=σzz=0,说明在滑移面上,没有正应力,
只有切应力,而且切应力τxy 达到极大值 。
(5)y>0时,σxx<0;而y<0时,σxx>0。这说明正刃型位错的位错 滑移面上侧为压应力,滑移面下侧为拉应力。
位错的能量通常分为位错中心区的能量与中心以外 区域的能量两部分。
中心以外区域的能量为弹性能,占能量的绝大部分 通常以位错的弹性能代表位错的能量。
假设其为一个单位长度位错线,为造成这个位错克服切应力 τθr所做的功为单位长度刃型位错的应变能:
进一步简化得单位长度位错的总应变能:
1.位错的能量包括两部分:Ec和Ee。 2.位错的应变能与G和b2成正比。
3.
,常用金属材料的约为1/3,故螺型位错
的弹性应变能约为刃型位错的2/3。
4.位错的存在均会使体系的内能升高,使晶体处于 高能的不稳定状态,位错是热力学上不稳定的晶 体缺陷。
3.位错的线张力 line tension
位错应变能与位错线长度成正比。为降低能量, 位错线具有尽量缩短其长度的倾向,从而使位错产
2. Tension be1)同时存在正应力分量与切应力分量,而且各应力分量的 大小与G和b成正比,与r成反比,即随着与位错距离的增大, 应力的绝对值减小。
(2)各应力分量都是x,y的函数,而与z无关。这表明在 平行于位错的直线上,任一点的应力均相同。
(6)在应力场的任意位置处, 。
(7)x=±y时,σyy,τxy均为零,说明在直角坐标的两条对角线处, 只有σxx,而且在每条对角线的两侧,τxy(τyx)及σyy的符号相反。
2.位错的应变能
位错的名词解释
位错的名词解释位错,是指晶体中原子排列发生偏移或者交换,形成错位的现象。
它是晶体结构中常见的缺陷之一,对材料的机械性能和导电性能等起到重要影响。
细致观察位错的性质及其影响,对于材料科学和工程领域具有重要意义。
一、位错的形成和分类1. 形成位错的原因位错的形成通常是由晶体生长过程中的应力、温度变化以及机械变形等因素所引起。
例如,在晶体生长过程中,由于生长速度的不均匀或晶体材料的不完美,就会出现位错。
同样地,在材料的机械变形过程中,如弯曲、拉伸或压缩等,也会导致晶体中位错的产生。
2. 位错的分类根据原子重新排列的方式和排列结构的不同,位错可以分为线性位错、平面位错和体位错。
线性位错是指位错线与晶体的某一晶面交线的直线排列,具有一维特征。
最常见的线性位错有位错线、螺旋位错和阶梯位错等。
平面位错是指位错线与晶体的某一晶面交线上有无限个交点,呈现出平面性的特点。
常见的平面位错有位错环、晶界以及孪晶等。
体位错是指位错线在晶体内没有终点,具有三维特征。
体位错通常有位错蠕变和位错多晶等。
二、位错的性质与作用1. 位错的性质位错对晶体的特性和行为有着重要影响。
它能够改变晶体的原子排列方式,导致晶体局部微结构的变化。
位错可以促进晶体的固溶体形成以及离子扩散等过程。
此外,位错还会影响晶体的力学性能,如硬度、韧性和弹性等。
因此,位错常常被用来研究晶体的性质和行为。
2. 位错的作用位错在材料科学和工程领域具有广泛的应用价值。
首先,位错可以增加晶体的强度和韧性,提高材料的抗变形能力。
这在制备金属材料和合金中起到重要作用。
此外,位错也可以影响材料的导电性能,例如半导体中的位错可以改变电子迁移的路径和速率,从而影响整个电子器件的性能。
除此之外,位错还可以用于晶体的生长和材料的表面改性等过程。
三、位错的观察和表征方法1. 传统观察方法传统的位错观察方法包括透射电镜、扫描电镜和X射线衍射等技术。
透射电镜可以通过对物质的薄片进行观察,获得高分辨率的位错图像。
位错理论——精选推荐

位错理论《位错与位错强化机制》杨德庄编著哈尔滨⼯业⼤学出版社1991年8⽉第⼀版1-2 位错的⼏何性质与运动特性⼀、刃型位错2.运动特性滑移⾯:由位错线与柏⽒⽮量构成的平⾯叫做滑移⾯。
刃型位错运动时,有固定的滑移⾯,只能平⾯滑移,不能能交叉滑移(交滑移)。
刃型位错有较⼤的滑移可动性。
这是由于刃型位错使点阵畸变有⾯对称性所致。
⼆、螺型位错1. ⼏何性质螺型位错的滑移⾯可以改变,有不唯⼀性。
螺型位错能够在通过位错线的任意平⾯上滑移,表现出易于交滑移的特性。
同刃型位错相⽐,螺型位错的易动性较⼩。
、位于螺型位错中⼼区的原⼦都排列在⼀个螺旋线上,⽽不是⼀个原⼦列,使点阵畸变具有轴对称性。
2.混合位错曲线混合位错的结构具有不均⼀性。
混合位错的运动特性取决于两种位错分量的共同作⽤结果。
⼀般⽽⾔,混合位错的可动性介于刃型位错和螺型位错之间。
随着刃型位错分量增加,使混合位错的可动性提⾼。
混合位错的滑移⾯应由刃型位错分量所决定,具有固定滑移⾯。
四、位错环⼀条位错的两端不能终⽌于晶体内部,只能终⽌于晶界、相界或晶体的⾃由表⾯,所以位于晶体内部的位错必然趋向于以位错环的形式存在。
⼀般位错环有以下两种主要形式:1. 混合型位错环在外⼒作⽤下,由混合型位错环扩展使晶体变形的效果与⼀对刃型位错运动所造成的效果相同。
2. 棱柱型位错环填充型的棱柱位错环空位型棱柱位错环棱柱位错环只能以柏⽒⽮量为轴的棱柱⾯上滑移,⽽不易在其所在的平⾯上向四周扩展。
因为后者涉及到原⼦的扩散,因⽽在⼀般条件下(如温度较低时)很难实现。
1-3 位错的弹性性质位错是晶体中的⼀种内应⼒源。
——这种内应⼒分布就构成了位错的应⼒场。
——位错的弹性理论的基本问题是对位错周围的弹性应⼒场的计算,进⽽还可以推算位错所具有的能量,位错的线张⼒,位错间的作⽤⼒,以及位错与其他晶体缺陷之间的相互作⽤等⼀些特性。
——⼀般采⽤位错的连续介质模型(不能应⽤于位错中⼼区),把晶体作为各向同性的弹性体来处理,直接采⽤胡克定律和连续函数进⾏理论计算。
位错理论3-位错的弹性性质资料

x2
x
y2
s xx s yy s zz s xy s yx 0
11
Stress field of screw dislocation ➢螺位错应力场特点:
只有切应力( sqz、szq分量),无正
应力分量 应力场对称于螺位错的位错线——轴
对称:切应力分量大小只与距位错线 中心的距离r有关,与q无关。
➢ 因为只有sqz和eqz:
➢ 所以:
W V
1 2
s
qz
e qz
1 Gb
2 2r
b
2r
Gb 2
8 2r 2
➢ 考虑位错微元:半径为r,厚度dr,长度L的管
状体元
dW
1 2
s
eqz qz
dV
1 2
Gb
2r
b
2r
d (2r dr L)
Gb 2L
4r
dr
➢ 设位错中心半径为r0,应力场范围半径为R,所
s ii s ij
Eeii Geij
G
E
2(1
)
6
目录
➢弹性理论基础 ➢位错的应力场 ➢位错的应变能 ➢位错所受的力 ➢位错的线张力 ➢位错间的相互作用力
7
Stress field of dislocation
➢ 位错晶格畸变应力场 ➢ 以位错中心的某点为定点,应力场描述为:
or
4
Basis of elasticity theory
➢应变分量(应变张量strain tensor):
➢只err,有eq6q个, e独zz, 立erq分, e量rz,:eqez;xx, eyy, ezz, exy, exz, eyz;
位错能量计算公式
位错能量计算公式位错能量是指晶体中位错线所储存的能量,其大小决定了位错的稳定性和晶体的机械性能。
位错能量的计算公式可通过弹性理论推导得到。
在弹性理论中,晶体中的位错可看作一种线状缺陷,其引起的应变场可以用线弹性理论来描述。
对于螺旋位错和较长的位错线,它们的位错能量主要由弹性畸变能和位错线周围的弹性应力张力贡献。
位错线周围的弹性应力能表达式为:$$E_s = \frac{1}{2}b\sigma s$$其中,$E_s$是位错线的弹性应力能,$b$是位错的Burgers矢量大小,$\sigma$是外界应力,$s$是位错线的长度。
位错线引起的弹性畸变能表达式为:$$E_d = \frac{1}{2}\mu b^2\ln\left(\frac{r}{r_0}\right)$$其中,$E_d$是位错线的弹性畸变能,$\mu$是材料的剪切模量,$r$是位错线的半径,$r_0$是材料的截断半径。
位错能量$E_t$的总和即为弹性能量和畸变能量之和,即:$$E_t = E_s + E_d = \frac{1}{2}b\sigma s + \frac{1}{2}\mub^2\ln\left(\frac{r}{r_0}\right)$$当位错线的长度很长时,即$s$趋近于无穷大时,弹性应力能会远大于弹性畸变能,因此位错能量主要由位错线周围的弹性应力能决定。
在某些特殊情况下,位错线周围的弹性应力能也可忽略不计,如边界位错、近排斥位错等。
需要注意的是,上述位错能量的计算公式是在弹性理论假设下推导得到的,且仅适用于线性弹性材料。
在非线性和脆性材料中,由于位错特性的变化,计算位错能量可能需要采用其他方法。
位错能量的计算对于研究位错的稳定性、位错运动行为以及晶体的力学性能具有重要意义,可以为材料的设计和性能优化提供理论基础。
位错的弹性性质
z
而相应的切应力便为
b 2r
z z G z
Gb 2r
G称为剪切模量,其余应力分量均为0。
rr zz r r rz zr 0
若用直角坐标表示
螺型位错的应力场具有以下特点:
(1)只有切应力分量,正应力分量全为零,这表明螺位错 不引起晶体的膨胀和收缩。
第二个下标代表应力方向。
例如
xy
表示作用在x面上沿y轴方向的应力(所谓x 面就是外法线沿x轴方向的平面。
x x , y y 和 z z 三个正应力通常简写为 x , y 和 z
从以上讨论可知,要确定一点的应力状态,需要给出通 过该点的3个正交平面上的9个应力分量。
x , x y , x z , பைடு நூலகம் y , y x , y z , z , z x , z y
体表面的外法线方向相反,则此力为压力,它所产生的应力就 是压应力。拉应力和压应力都和作用面垂直,统称为正应力。 如果作用力平行于作用面,则此力称为剪力(切力),单 位面积上的剪力就称为剪应力,它力图改变物体的形状,而不
改变体积。
在一般情形下,作用力和作用面即不垂直,也不平行,此 时它所引起的应力就可以分为正应力和剪应力 。
物体中任意一点的应力状态均可用九个应力分量描述,图分
别用直角坐标和圆柱坐标说明这九个应力分量的表达方式。
(a)直角坐标; (b)圆柱坐标的正应力及切应力表示办法 物体中一点(图中放大为六面体)的应力分量
下面我们讨论应力的标注方 法及其意义。
表示正应力, 表示剪应力。
不同面和方向的应力下标区别, 第一个下标代表应力的作用面,
的大小与G和b成正比,与r成反比,即随着与位错距离的
东北大学材料科学基础_第三章__晶体的缺陷(五)位错的弹性性质

复习 应力
一、应力:
受力物体截面上内力的集度,即单位面积上的内力。
P1 P2 2 mΔ A
K
ΔF
P P3 3
P P4 4
K
Fk
s
m
F Fk A0 A lim
控制 Fk 复杂,按理论力学上分成两个分量
Fk
剪应力 MPa=N/mm2 = 10 6 Pa kg/cm2 = 0.1 MPa
(a) 直角坐标系(xyz)
3个正应力分量(σxx, σyy σzz) 和 6个切应力分量 (τxy=τyx, τyz=τzy , τxz=τzx ) ; 下标中第1个字母表示应力 作用面的外法线方向 ,第 2字母表示应力的指向。
(b) 圆柱坐标系(
r z )
3 个正应力分量 (σθθ、
σzz、σrr) 和六个切应力分量
c. 单位长度混合位错的应变能:3.15式(P99)
简化上述各式得3.16式
结论:(P100)
(1) -(5)
(1) 刃型位错We 假设 x→x+dx ,那么 b'→ b'+db'.
Gb x( x 2 y 2 ) xy 2 (1 ) ( x 2 y 2 ) 2
zx zy 0
xy
Gb x( x 2 y 2 ) 2 (1 ) ( x 2 y 2 )2
zx zy 0
y2 ) )2
zx zy 0
刃位错应力场特点: ① 正应力分量和切应力分量同时存在。 ② 各应力分量都是x、 y的函数,而与z无关。 ③ 应力场以多余半原子面对称。 ④ y=0时, σ=0只有切应力而无正应力,切应力最大值Gb/[2(1υ)x] ⑤ y>0 时, σxx<0;y<0时, σxx>0 。说时正刃位错滑移面上部 受压,下部分受拉。 ⑥ 应力场中任意一点位置, |σxx| > |σyy| ⑦ x = ±y时及y轴上 σyy = τxy = 0,说明在直角坐标系中的对 角线处只有σxx ,而且在每条对角线的两侧, τxy及σyy 的符号相 反。 ⑧ 上述公式不能适用于刃位错的中心区。
第五章位错的弹性性质
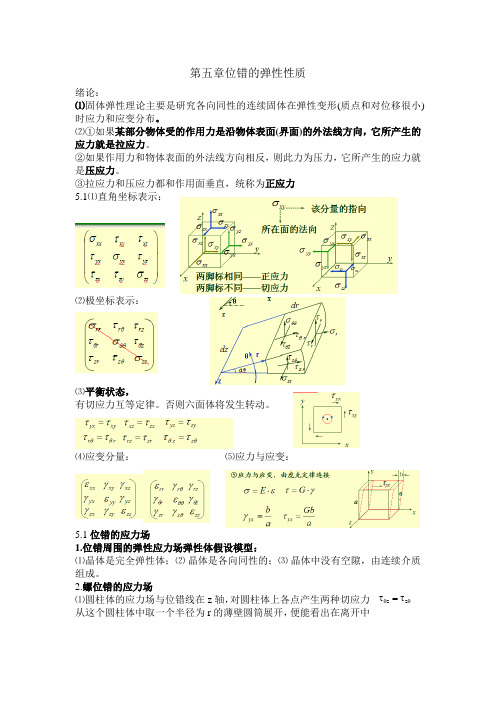
第五章位错的弹性性质绪论:⑴固体弹性理论主要是研究各向同性的连续固体在弹性变形(质点和对位移很小)时应力和应变分布。
⑵①如果某部分物体受的作用力是沿物体表面(界面)的外法线方向,它所产生的应力就是拉应力。
②如果作用力和物体表面的外法线方向相反,则此力为压力,它所产生的应力就是压应力。
③拉应力和压应力都和作用面垂直,统称为正应力 5.1⑴直角坐标表示:⑵极坐标表示:⑶平衡状态,有切应力互等定律。
否则六面体将发生转动。
⑷应变分量: ⑸应力与应变:5.1位错的应力场1.位错周围的弹性应力场弹性体假设模型:⑴晶体是完全弹性体;⑵ 晶体是各向同性的;⑶ 晶体中没有空隙,由连续介质组成。
2.螺位错的应力场⑴圆柱体的应力场与位错线在z 轴,对圆柱体上各点产生两种切应力 从这个圆柱体中取一个半径为r 的薄壁圆筒展开,便能看出在离开中θθτ=τzz心r 处的切应变为由于圆柱只在z 轴方向有位移,在xy 方向都没有位移,所以其他分量都为0:螺位错应力场的特点: 采用直角坐标: ①只有切应力分量(σθz 、σz θ),而无正应力。
②螺位错产生的切应力大小只与r 的大小有关,即只与离位错线的距 离成反比,而与θ、z 无关。
其应力场关于位错线是对称的。
3刃位错的应力场直角坐标表示:刃位错应力场的特点:①同时存在着正应力与切应力;②刃型位错的应力场,对称于多余半原子面;③滑移面上无正应力,只有切应力,且其切应力最大。
④正刃型位错的滑移面上侧,在x 方向的正应力为压应力; 滑移面下侧,在x 方向上的正应力为拉应力⑤半原子面上或与滑移面成45°的晶面上,无切应力。
5.2位错的弹性能⑴单位体积正应变能:2E 21V u ε= 单位体积切应变能:2G 21V u γ⋅=⑵单位长度螺位错的弹性应变能为:02s r Rln 4Gb L u U π==⑶单位长度刃位错的弹性应变能为:(取υ=1/3) r2b ⋅π⋅=γrGb G πγττθθ2z z =⋅==∴s U 23 s U 11U e =υ-=⑷混合位错的弹性能 : 其中:0.5≤α≤1 ⑸结论①总应变能U T =U 0+U el ②U T ∝b2,晶体中具有最小b 的位错最稳定b 大的位错有可能分解成b 小的位错,以降低系统的能量③螺位错比刃位错易形成。
位错基础
一般立方晶系中柏氏矢量可表示为 b=a/n<uvw>,其中n为正整数。
通常柏氏矢量的大小(即位错强度)还用下式
来表示。
| b |
a
u2 v2 w2
n
3. 柏氏矢量的守恒性(Conservation)
位错理论的发展历史较短,还存在一些不 完善之处。弗兰克和斯蒂兹(J.W.Steeds)在1975 年的一篇“晶体位错”的评论中指出:位错有 些理论是确切的,因为它们是纯几何的或纯形 貌的。有些部分显然是近似的,然而是可靠的。 但现在有意义的问题是不能确信那些已做的近 似的可靠性,因此必须依靠全部的理论方法以 及观察和推测来谋求进一步发展。除了这些 “近似”之外,在位错领域中迄今还没有完全 解决的主要问题是如何填补单个位错的性质和 位错集团的行为之间的鸿沟。因此,位错理论 尚有待今后进一步发展和完善。
混合型位错线是一条曲线,在A处位错线与滑移矢量 平行,因此是螺型位错;而在C处位错线与滑移矢量垂直, 因此是刃型位错。A与C之间,位错线既不垂直也不平行 于滑移矢量,每一小段位错线都可分解为刃型和螺型两个 部分,因此是混合型位错。
由于位错线是已滑移区与未滑移区的边界 线,因此一根位错线不能终止于晶体内部,而 只能露头于晶体表面或晶界。
1939年柏格斯(J.M.Burgers)提出了螺型位错的概
念和柏氏矢量,使位错的概念普遍化,并发展了位错应 力场的一般理论,接着位错理论得到多方面的发展。 1940年派尔斯(Peierls)提出半点阵模型,到1947年在 纳波罗(Nabarro)的帮助下,计算出使位错滑移所需 的临界切应力(P-N力)。 1949年柯垂尔(A.H.Cottrell) 提出位错与溶质原子的作用问题,用碳原子钉扎位错来 解释钢中屈服点的现象获得成功(Cottrell气团),弗兰 克尔的螺型位错促进晶体生长的理论预告获得了令人信 服的证实。而后许多人几乎同时独立地在显微镜下观察 到了位错的存在及其形状。
第五章位错的弹性性质
第五章位错的弹性性质绪论:⑴固体弹性理论主要是研究各向同性的连续固体在弹性变形(质点和对位移很小)时应力和应变分布。
⑵①如果某部分物体受的作用力是沿物体表面(界面)的外法线方向,它所产生的应力就是拉应力。
②如果作用力和物体表面的外法线方向相反,则此力为压力,它所产生的应力就是压应力。
③拉应力和压应力都和作用面垂直,统称为正应力 5.1⑴直角坐标表示:⑵极坐标表示:⑶平衡状态,有切应力互等定律。
否则六面体将发生转动。
⑷应变分量: ⑸应力与应变:5.1位错的应力场1.位错周围的弹性应力场弹性体假设模型:⑴晶体是完全弹性体;⑵ 晶体是各向同性的;⑶ 晶体中没有空隙,由连续介质组成。
2.螺位错的应力场⑴圆柱体的应力场与位错线在z 轴,对圆柱体上各点产生两种切应力 从这个圆柱体中取一个半径为r 的薄壁圆筒展开,便能看出在离开中θθτ=τzz心r 处的切应变为由于圆柱只在z 轴方向有位移,在xy 方向都没有位移,所以其他分量都为0:螺位错应力场的特点: 采用直角坐标: ①只有切应力分量(σθz 、σz θ),而无正应力。
②螺位错产生的切应力大小只与r 的大小有关,即只与离位错线的距 离成反比,而与θ、z 无关。
其应力场关于位错线是对称的。
3刃位错的应力场直角坐标表示:刃位错应力场的特点:①同时存在着正应力与切应力;②刃型位错的应力场,对称于多余半原子面;③滑移面上无正应力,只有切应力,且其切应力最大。
④正刃型位错的滑移面上侧,在x 方向的正应力为压应力; 滑移面下侧,在x 方向上的正应力为拉应力⑤半原子面上或与滑移面成45°的晶面上,无切应力。
5.2位错的弹性能⑴单位体积正应变能:2E 21V u ε= 单位体积切应变能:2G 21V u γ⋅=⑵单位长度螺位错的弹性应变能为:02s r Rln 4Gb L u U π==⑶单位长度刃位错的弹性应变能为:(取υ=1/3) r2b ⋅π⋅=γrGb G πγττθθ2z z =⋅==∴s U 23 s U 11U e =υ-=⑷混合位错的弹性能 : 其中:0.5≤α≤1 ⑸结论①总应变能U T =U 0+U el ②U T ∝b2,晶体中具有最小b 的位错最稳定b 大的位错有可能分解成b 小的位错,以降低系统的能量③螺位错比刃位错易形成。
位错的弹性性质

公式应用: 当r 趋近于0时,应力发散,因而上述结果不适合位错 中心区域,即严重畸变区,线弹性理论不适用,这也 是弹性模型采用空心(半径为r0)圆柱的原因,空心 区域为核心区域。 当r和b接近时,应力达到理论切变强度,并且应变超 过10%,因而r0取值范围在b到4b之间,即绝大多数 r0≤1nm。
3
三.基础弹性力学知 识
物体中任意点的应力状态均 可用9个应力分量描述: 直角坐标系 正应力分量:
xx
、 yy 、 zz
yx xz
、 、 、 、 、
xy zx zy
切应力分量:
yz
下角标含义: 第一个符号表示应力作用面 法线方向,第二个符号表示 应力方向
4
圆柱坐标系
b 2r
Z Z G Z
Gb 2r
r rz zr 0
8
若用直角坐标表示:
yz
zy
zx
xz
Gb x 2 2 2 x +y Gb y 2 2 2 x +y
yy
xxBiblioteka zz
xy
yx
0
因此,螺型位错的应力场具有以下特点: (1)只有切应力方向,正应力分量全为零,这表明螺 型位错不会引起晶体的膨胀和收缩。 ( 2 )螺型位错所产生的切应力分量只与 r 有关(成反 比),而与θ,z无关。只要r一定, τzθ 就是常数。螺 型位错应力场是径向对称的,即同一半径上的切应力 相等,随着与位错距离的增大,应力值减小。
2016/1/7 14
15
2
二.分析方法:
1.位错中心附近:畸变严重,须直接考虑晶体结构 和原子之间的相互作用; 2.远离位错中心区:畸变较小,可简化为连续弹性 介质,用线弹性理论进行处理,位错的畸变就以弹 性应力场和应变能形式表达。 理论基础:弹性连续介质模型 假设:1.晶体是完全弹性体,完全服从虎克定律, 即不 存在塑性变形; 2. 各向同性; 3. 连续介质,不存在结构间隙。
《材料科学基础》课件3.2.4位错的弹性性质

fy
b2
Gb1b2 y(3x 2 y 2 ) 2π(1 ) (x 2 y 2 )32
b2
Gb1b2 y(3x 2 y 2 ) 2π(1 ) (x 2 y 2 )2
2
1
4
3
2
1
4
平行刃位错和螺位错间的交互作用 因为平行的刃位错和螺位错的应力场没有重叠的分量,所
以,它们间的交互作用为零。
ES
Gb 2
4
ln
R r0
(2) 刃型位错应变能
单位长度刃型位错应变能
Ee
Gb2
4 (1
v)
ln
R r0
(3)混合位错的应变能
设混合位错的柏氏矢量b与位错线交角为θ,则:
be b sin, bs b cos
EM Ee ES
Gb2 sin2 lnR Gb2 cos2 lnR
4(1r) r0
a) 位错的应力场 位错线附近的原子偏离了正常位置,引起点阵畸变,从而产 生应力场。 (1)位错中心部,原子排列特别紊乱,超出弹性变形范围 (2)中心区外,应力场用各向同性连续介质弹性理论来处理。 (3)分析位错应力场时,常设想把中心区挖去,而在中心区以 外的区域采用弹性连续介质模型导出应力场公式。 假设:1.完全服从虎克定律,即不存在塑性变形;
定量计算2个位错间交互作用力的简单方法:把其中一个位错 (A)的应力场看作是另一位错(B)的“外加应力场”,这应力 场对B位错的作用力就是A位错对B位错的作用力。
两个平行螺位错间的交互作用
➢ S1和S2是2个平行z轴的螺位错,它们的柏氏矢量分别为b1和b2, S1位错在z轴, S2位错处在(r,θ)处。
如果作用力平行于作用面,则此力为剪力(切力),单位 面积上的切力被称为切应力。它力图改变物体的形状,而不 改变体积。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单元体受力情况
力矩平衡微分方程
➢由 Mx0 可得:
yz zy
➢同理: xy yx zx xz
➢即切应力互等
力平衡微分方程
➢单元体静止时(存在体积力):
xx yx zx X 0 x y z xy yy zy Y 0 x y z xz yz zz Z 0 x y z
zz ( rr )
r
D cos r
rz z 0
其 中 : D= Gb 2 (1 - )
进一步可由胡克定律求出 应变
刃型位错的应力场分布
1.同时存在正应力分量与 切应力分量;
2.应力分布与z无关;
3. y>0处为压应力
y<0处为拉应力
4.滑移面(y=0)只有切 应力;
多余半原子面处(x=0) 只有正应力
uz ) x
1 2 xz
yz
1 (uy 2 z
uz ) y
1 2 yz
变形后的形状变化
5. 应力与应变关系
ε xx
1 E
[σ
xx
(σ
yy σ
zz )]
ε yy
1 E
[σ
y y (σ x x σ z z ) ]
ε zz
1 E
[σ
z z (σ
xx σ
yy )]
ε yz
1σ 2G
uy ) x
1 2 xy
xz
1 (ux 2 z
uz ) x
1 2 xz
yz
1 ( uy 2 z
uz ) y
1 2 yz
( 3 )由 胡 克 定 律 求 出
➢螺位错应力应变场分布
ε xx = ε yy = ε zz = ε yx = 0
ε xz
=
-
b 4π
gx 2
y +
y2
ε yz
=
b
x
yz
ε zx
1 2G
σ
zx
ε yy
1σ 2G
xy
➢或者
σ xx = (λ + 2 G )ε xx + λ ε yy + λ ε zz
σ yy = λ ε xx + (λ + 2 G )ε yy + λ ε zz
σ zz = λ ε xx + λ ε yy + (λ + 2 G )ε zz
σ xy = 2 G ε xy
1)找出区域内应变能的体积密度函数并 积分
2)通过形成一个位错所做的功确定
➢直螺型位错的应变能 应变能密度函数积分法
W Gb2 ln R
L 4 r0
➢直刃型位错的应变能
外力做功形成位错法
W = Gb2 ln R
L 4(1v) r0
刃型位错的应变能大于螺型位错的应变能
➢ 混合位错的应变能
➢将b分解后分别求螺型、刃型分量的应变能后叠
螺型位错的模型——连续介质模型
假设晶体是各向同性的均匀连续弹性介质,位错处 在无限大的连续介质中
优点:模型简单
缺点:中心区不适用
应力应变场求解的一般思路
(1) 确 定 位 移
u x,u y,uz
(2) 由 位 移 确 定
xx
ux x
, yy
uy y
, zz
uz z
xy
1 ( ux 2 y
σ xz = 2 G ε xz σ yz = 2 G ε yz
其中G= E 2(1 +ν )
=
νE
2Gν
(1 ν ) (1 2ν ) ( 1 - 2 ν )
6.以位移分量表示平衡方程
➢ 静力平衡,无体积力
xx yx zx 0 x y z
考虑应力-应变-位移关系
xy yy zy 0 x y z
5.y=x与y=-x处,纯拉压 状态
刃位错的等应力曲线
单位G/400(1-ν)
混合位错的应力场
➢由其中的螺位错与刃位错的应力应变场 叠加得到
1 r
3.位错的应变能
➢因何而生: 畸变。 又称自能 E=Ec+Ee
忽略较小的错排能Ec,E=Ee
表示为:W/L——单位长度位错线 的能量
➢如何求解:
加
W G b 2 ln R
L 4 k r0
k 1 v 1 v cos2
(W L)mGb2
0.5: 1.0
位错分解或合成可降低应变能
➢应变能概括:
4π
g x
2
+
y2
σ xx = σ yy = σ zz = σ yx = 0
σ xz
=
-
Gb 2π
gx 2
y +
y2
σ yz
=
Gb x
2
π
g x
2
+
y2
没有正应力和正应变,只有切应力和切应变
➢柱坐标下:
σrr =σθθ=σzz=σrθ=σzr =0 σθz = 2Gπbr εθz=4πb r
特点:只有切应力,没有正应力 应力应变中心对称(与θ无关) 应力应变与r反比
➢单元体运动时:
xx yx zx X 2u x
x y z
t2
xy
x
yy
y
zy
z
Y
2u y t2
xz
x
yz
y
zz
z
Z
2uz t2
4. 应变与位移的关系
xx
ux x
, yy
uy y
, zz
uz z
xy
1 ( ux 2 y
uy x
)
1 2 xy
xz
1 (ux 2 z
位错的弹性理论、计算 方法和主要内容
➢位错具有应力场
➢弹性应力场可由弹性理论计算
➢包含弹性应力场、能量、线张力、相互 作用力等内容
➢2.1 弹性力学基本知识
➢1.弹性连续介质 基本假设:
变形服从胡克定律 是各向同性的 介质完全连续,无结构间隙
已证实:适用于大部分弹性变形的点阵区域
2.记号 (1)应力 用应力均匀分布的六面体单元表示应力
刃型位错的应力应变场及模型
xx
D
y(3x2+y2) ( x 2 + y 2 )2
yy
D y(x2-y2) ( x 2 + y 2 )2
zz ( xx yy )
xz zx yz zy 0
xy
yx
D x(x2-y2) ( x 2 + y 2 )2
rr
D
sin r
正面正方向为正 负面负方向为正
其余应力为负
单元体上的应力分量
与单元体有关的坐标变换
(2)应变
正应变
ii
l l
伸长为正,缩短为负
切应变 ij 两方向间直角变小为正,变大为负
(3)位移 u x , u y , u z
沿坐标轴正向为正,负向为负
3.平衡微分方程
➢单元体平衡时
Mx0 My0 Mz0 Fx 0 Fy 0 Fz 0
xz yz zz 0 x y z
➢ 用位移分量表示的平衡方程
2u x
1 1 2v
x
0
2u y
1 1 2v
y
0
2u z
1 1 2v
z
0
其中:
2
2 x2
2 y2
2 z2
,
xx
yy
zz
2.2 位错的应力应变场
1.螺位错的应力应变场 (1)模型建立
错排模型:
不方便数学处理, 不采用