六点定位原则
六点定位原理及方法概要
工件的六点定位原则一、概述工件的定位和夹紧是机械制造工艺中十分重要的技术内容之一,因为零件在加工时在机床上的正确安装(定位和夹紧)与否是获得合格零件的关键,保证加工时刀具与工件之间正确加工位置,就是说是保证零件的尺寸精度、形状和位置精度以及合格的表面质量等重要技术要求的关键。
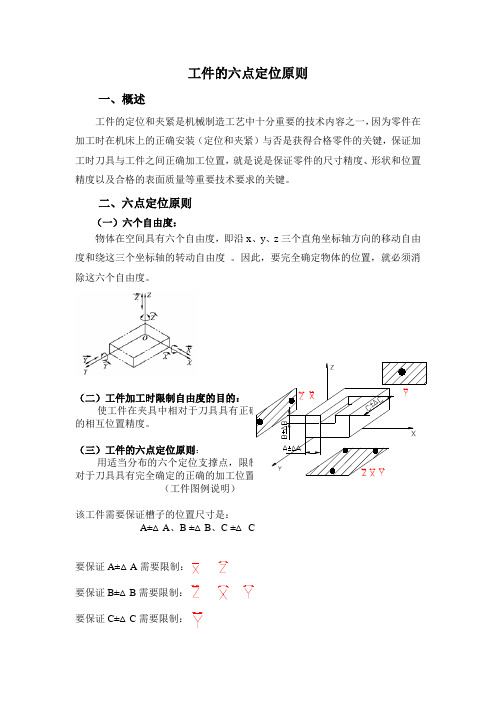
二、六点定位原则(一)六个自由度:物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。
因此,要完全确定物体的位置,就必须消除这六个自由度。
(二)工件加工时限制自由度的目的:的相互位置精度。
(三)工件的六点定位原则:(工件图例说明)该工件需要保证槽子的位置尺寸是:A±△A、B ±△B、C ±△ C要保证A±△A要保证B±△B要保证C±△C(四)定位支承点的合理分布:如果定位支承点如图分布,将有以下自由没法限制,即为:使工件产生绕Y轴和Z轴的旋转而无法保证A±△A、B ±△B的加工精度定位支承点像这样在同一条直线上,是绝对不允许的,属不合理分布。
二、六点定位原则的应用(一)分析模型的建立1、建立三位坐标系2、设立分析平面一个大平面(三点):限制一个移动和两个转动一个狭长平面(两点):限制一个移动和一个转动一个小平面(一点):限制一个移动(如图)(二)投影(1)对工件与夹具定位元件的接触面按其特点分别往三个坐标平面上投影。
(2(3(三)定位分析1、套类工件在芯轴上的定位:投影结果:1)XOY面限制了2)YOZ面限制了(2)圆柱形工件在V型贴上定位:1)圆柱在两个短V型铁上定位限制了:2)思考:A)圆柱体在长、短V型铁上定位。
B)圆柱体在车床上两顶尖安装时的定位。
定位原则

2.4 定位原理学习要点:定位是机械加工中一个极为重要的问题。
学习本节要深刻理解和牢固掌握定位原理,熟知常用的定位方法。
深刻理解欠定位与过定位的概念,能正确分析和处理有关欠定位与过定位的问题。
深刻理解定位误差的概念,能正确计算定位误差。
2.4.1 六点定位原则六点定位任何一个位置尚未确定的工件,均具有六个自由度,即沿空间三个直角坐标轴X、Y、Z方向的移动与绕它们的转动,分别以、、、、、表示。
要使工件在机床夹具中正确定位,必须限制或约束工件的这些自由度。
如图2-24中所示,采用六个定位支承点合理布置,使工件有关定位基面与其相接触,每一个定位支承点限制了工件的一个自由度,便可将工件六个自由度完全限制,使工件在空间的位置被唯一地确定。
这就是通常所说的工件的六点定位原则。
六点定位原则(续)两点说明:1)机械加工中关于自由度的概念与力学中自由度的概念不完全相同。
机械加工中的自由度实际上是指工件在空间位置的不确定性。
这里特别要注意将定位与夹紧的概念区分开来。
工件一经夹紧,其空间位置就不能再改变,但这并不意味着其空间位置是确定的。
例如,图2-25所示板状工件安放在平面磨床的磁性工作台上,扳动磁性开关后,工件即被夹紧,其位置就被固定。
但工件放在工作台什么位置上并不确定,既可以放在1的位置上(图中实线所示),也可以放在2的位置上(图中虚线所示),也即工件的、和三个自由度未被限制。
2)六点定位原则中"点"的含义是限制自由度,不要机械地理解成接触点。
例如,图2-25所示板状工件安放工作台上限制了3个自由度,是三点定位。
实际上,工件与工作台面接触点可能有多个。
2.4.1 六点定位原则(续)典型定位元件的定位分析在实际生产中,工件总是通过定位元件实现其在夹具或机床上的定位。
定位元件有多种形式,常用的有支承钉、支承板、定位销、定位套、心轴、V型块等,其中多数已标准化。
表2.10给出一些典型定位元件的定位分析,请读者特别注意其限制的自由度。
六点定位原理范文

六点定位原理范文一、背景随着科技的发展,人们对于室内定位系统的需求也越来越大。
传统的卫星定位系统(GPS)在室内定位上并不准确,因为信号会受到建筑物的干扰而变弱。
为了解决这个问题,研究人员提出了六点定位原理,通过在建筑物内安装多个参考点来增强信号的强度和准确性。
二、原理移动设备在进行定位时,会通过接收设备收集到这六个参考点的信号强度。
根据信号强度的变化,系统可以计算出移动设备距离参考点的相对位置。
通过对这六个相对位置进行三角定位计算,可以得出移动设备的三维坐标。
具体来说,六点定位原理包括以下几个步骤:1.参考点安装:首先,在建筑物内选择合适的位置安装六个参考点。
这些参考点可以是Wi-Fi接入点、蓝牙信标或其他无线通信设备。
2.信号收集:移动设备在进行定位时,会通过接收设备收集到这六个参考点的信号强度。
通常使用无线通信模块(如Wi-Fi模块)进行信号收集。
3.信号处理:接收设备将收集到的信号强度传输给定位系统。
定位系统将对这些信号进行处理和分析,计算出移动设备相对于参考点的位置。
4.三角定位计算:根据得到的相对位置信息,定位系统利用三角定位算法计算移动设备的实际坐标。
5.定位结果输出:计算完成后,定位系统将移动设备的坐标信息输出到相应的终端设备上。
三、应用1.室内导航:通过六点定位原理,移动设备可以在室内环境中进行准确的导航。
例如,人们在商场、机场等大型建筑物内可以通过手机APP导航,定位到具体的商店、登机口等目的地。
2.室内定位服务:六点定位原理可以提供个性化的室内定位服务。
例如,根据用户的喜好和位置,系统可以推荐附近的餐厅、商店等服务设施。
3.室内监控:六点定位原理也可以用于室内监控系统。
通过将摄像头与参考点进行关联,系统可以实时监控建筑物内的人流和安全状况。
4.室内定位分析:六点定位原理还可以用于室内定位数据的分析。
通过收集和分析用户的位置数据,可以对室内环境进行优化和改进,提供更好的用户服务和体验。
六点定位原则名词解释

六点定位原则名词解释
六点定位原则是指在写作或演讲中,为了使信息更加清晰、有说服力和易于理解,需要遵循的六个原则。
这些原则包括,主题明确、立意鲜明、结构合理、论据充分、语言得体、情感贴切。
首先,主题明确是指在表达观点或论述内容时,要确保主题清晰明了,让读者或听众能够准确理解作者或演讲者要表达的核心意思。
其次,立意鲜明要求作者或演讲者在表达观点时,要有明确的立场和观点,不模棱两可,让人一目了然。
第三,结构合理是指文章或演讲应该有清晰的逻辑结构,包括开头、中间和结尾,条理清晰,层次分明,使读者或听众能够理解和接受作者的观点。
第四,论据充分要求作者或演讲者提供充分的事实、数据、案例等支持自己的观点,使观点更有说服力。
第五,语言得体是指在表达观点时要注意语言的准确性和得体
性,避免使用粗俗、不雅或歧视性的语言,使作品或演讲更加文雅、优美。
最后,情感贴切要求作者或演讲者在表达观点时,要注意情感
的表达,让读者或听众能够感同身受,增加作品或演讲的感染力和
吸引力。
总之,六点定位原则是在写作或演讲中为了使信息更加清晰、
有说服力和易于理解而需要遵循的六个原则,它们共同促进了信息
的有效传达和交流。
六点定位原则
二、限制工件自由度与加工要求的关系 工件在夹具中定位时,并非所有情况都必须限制六个自由度,这 主要取决于本工序的加工要求。对空间直角坐标系来说,工件在某 个方面有加工要求,则在那个方面的自由度就应予以限制。 1.完全定位 工件的 6 个自由度全部被限制,它在夹具中的位置是唯一的,称 为完全定位。
六点定位原则
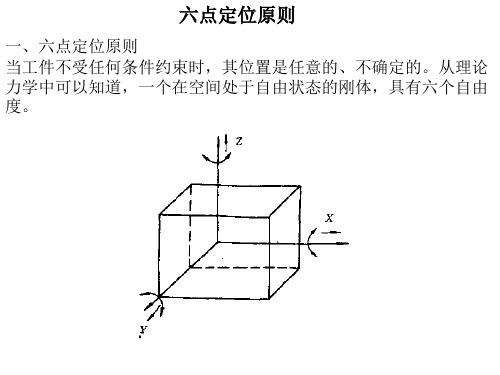
一、六点定位原则 当工件不受任何条件约束时,其位置是任意的、不确定的。从理论 力学中可以知道,一个在空间处于自由状态的刚体,具有六个自由 度。
பைடு நூலகம்
在分析工件定位时,通常用一个支承点限制工件的一 个自由度,用合理分布的6个支承点限制工件的6个自由度, 使工件在夹具中的位置完全确定,这就是“六点定位原 则”。
三、必须正确处理过定位 工件在夹具中定位,若几个定位支承点重复限制同一个或几个自 由度时,称为过定位。一般来说,形状精度和位置精度很低的毛坯 表面作为定位表面不允许出现过定位;已加工过的工件表面或精度 较高的毛坯表面作为定位表面时,为了提高工件定位的稳定性和刚 度允许采用过定位。 减少或消除过定位造成的不良后果,可采取如下措施: 1.改变定位元件的结构,定位元件在重复限制自由度的部分不起 定位作用。 2.撤消重复限制自由度的定位元件 3.提高工件定位基准之间以及定位元件工作表面之间的位置精度
2.不完全定位和欠定位 工件在夹具中定位,若六个自由度没有被全部限制时,称为部分 定位。 (1) 有些工件,根据加工要求,并不需要限制其全部自由度,称 为不完全定位。 (2) 当定位点少于工件应该限制的自由度,使工件不能正确定位 时,称为欠定位。欠定位不能保证加工要求,往往会产生废品,因 此是绝对不允许的。
六点定位原则

六点定位原则
六点定位原则(Six-point positioning principle)是指在视觉传播中为了更直观地传达信息,需要将视觉要素放置在画面的特定位置上,六个主要的定位原则如下:
1. 顶点定位(Vertex positioning):将主体放置在画面的顶点位置上,使之成为画面的焦点。
这种定位方式可以吸引观众的注意力,并突出主题。
2. 对称定位(Symmetrical positioning):通过将要素放在画面的对称位置上,创造出平衡和稳定感。
这种定位方式能够传递出一种和谐与和平的感觉。
3. 边缘定位(Edge positioning):将要素放置在画面的边缘位置上,可以创造出一种张力和独特感。
这种定位方式能够吸引观众的注意力,并突出画面的边缘特性。
4. 分隔定位(Separation positioning):通过将要素放置在画面的不同区块上,创造出一种分割和对比感。
这种定位方式可以突出不同要素之间的关系,并加强视觉效果。
5. 居中定位(Centrality positioning):将要素放置在画面的中央位置上,创造出一种稳定和集中的感觉。
这种定位方式能够使观众的目光集中在画面的中央,同时强调主题。
6. 对角定位(Diagonal positioning):通过将要素放置在画面的对角位置上,创造出一种动感和紧张感。
这种定位方式能够使画面更有层次感,并引起观众的兴趣。
六点定位原理

XZXZ
一个长定位套
XZ
XZXZX Z X Z
典型定位元件得定位分析
定位情 况
锥
圆顶
尖
锥
和 锥
图示
度
孔心
轴
限制的
自由度
固定顶尖
XYZ
浮动顶尖
锥度心轴
YZ
XY ZY Z
定位原理分析例一
解:定位分析 :
心轴得大端面限制得自由度为:
Y 、X 、Z
心轴得长銷限制得自由度为:
X 、Y 、X 、Y
支承板定位,限制工件得三个自由度: Y 、X (、保Z 证各孔
得轴心线垂直于工件底面);
两支承销定位,限制工件二个自由度: Z 、(Y保证工件二
小孔得位置尺寸H); 削边销定位,限制一个自由度: X(保证工件二小孔与大
孔中心得对称位置尺寸A)。
属于完全定位,且能保证工件得加工精度要求,方案正确。
未受约束得刚体,在空间得位置就是不确定得,它具有六
个自由度:
X
、Y
、Z
、X
、Y
、Z。为使刚体在空间具有确定得
位置,就必须限制其六个自由度。
定位就就是用各种形状不同得定位元件,来限制工件得
自由度。
六点定位原理:用六个支承点分别限制工件得六个自由
度从而使工件在夹具中得到正确加工位置得方法称为六点定 位原理、
过定位一般就是不允许得。
过定位分析
、Z X
X
Y
Z
a)
X
X Y
a2)
Z X
X Y
Z X
a1)
X Y
a3)
过定位
消除过定位及其干涉得途径:
1、 改变定位元件结构,消除对自由度得重复 限制,如长销改成短销;
六点定位基本原理的应用思路
六点定位基本原理的应用思路1. 背景介绍在现代社会中,定位技术已经成为了各个领域中不可或缺的一项技术。
其中,六点定位技术是一种基于多传感器数据融合的定位方法,可以在室内和室外环境中快速准确地确定目标位置。
本文将介绍六点定位的基本原理,并探讨其在实际应用中的思路。
2. 六点定位基本原理六点定位基于多传感器数据融合的原理,通过收集和使用多种不同类型的传感器数据,结合数学模型和算法,来实现目标的定位。
六点定位主要基于以下六种传感器来获取数据:1.GPS定位:利用全球定位系统(GPS)卫星发送的信号,通过接收信号来确定目标的经纬度坐标。
2.蜂窝定位:利用手机通信基站发送的信号,通过信号的强度和时延来确定目标的位置。
3.Wi-Fi定位:通过扫描周围的Wi-Fi热点,利用已知的Wi-Fi热点数据库来确定目标的位置。
4.惯性导航定位:利用加速度传感器和陀螺仪等惯性传感器来测量目标的加速度和角速度,并通过数学模型来估计目标的位置。
5.摄像头定位:利用摄像头拍摄目标周围环境的图像,并通过图像处理和计算机视觉算法来确定目标的位置。
6.声源定位:利用声音传感器捕捉周围环境的声音,并通过声音波传播原理来确定目标的位置。
3. 六点定位应用思路基于六点定位的基本原理,我们可以探索以下应用思路:•室内导航系统:借助六点定位技术,可以为室内环境提供精确的导航服务。
通过将室内定位数据与建筑物的平面图结合,可以实现人员在大型建筑物内的精确定位和导航。
•智能交通管理:利用六点定位技术,可以实现智能交通系统,监测交通流量、优化路线规划和实时导航,并提供准确的停车指引和交通事故信息。
•智能家居:通过六点定位技术,可以实现智能家居系统中的人体检测、姿势识别和行为识别等功能,提供智能化的家居控制和便捷的生活体验。
•虚拟现实与增强现实:结合六点定位技术和虚拟现实、增强现实技术,可以创建真实感观的虚拟空间体验,并实现与虚拟环境的交互。
•智能安防系统:通过六点定位技术,可以实现智能安防系统的行为监测和定位功能,及时发现和定位目标行为异常或入侵者。
六点定位法则的正确理解与应用

六点定位原理一个尚未定位的工件,其空间位置是不确定的,均有六个自由度,如图久4所示,即沿空间坐标轴益y.三个方向的移动和绕空三个坐标轴的转动(分别以片、F、Z ;和左、K % Z表不)。
cp?Y图3-4工件的六个自由度Z|图3-5长方体形工件的定位定他覷限制自由克如翊册示的长种工件,欲濮完全趟,可戕置那靛点,工件的三个而分别鸵戦保持搜热在甌而设置三个不共绷点h 2、](M-个耐,酬工件的三个自由度:2-. r b «W4.5 (姑編.MJTfs疣个自由廃颛體-个臥觀托由處視工件肪个自由觑都被IM⑺ 谜棘限制工件自由軸醸点緬啟支酬‘确支就,用瓠辆繼个媒勰粗件那自由躺酬,締恋就聽。
趟肝菲越廐I”分折工件的趟亦肪主韵下几点(1)趟支谕制工件揶臓,鋤城如牡件删确咖驰口鵬噬織去越辄(2)-tmtaRrt自由處-个工做林个自喊戕酣越棘融目,飙上不据眇个。
①分雅战蘇的啟作酣,祥虑力觸札工件韓-自酿線制,并林工件按別麒脱离啟支非斛帅淞竝外力伽下税酬淑、工件蜿腓肝不艇动,即朕紧也排剧江件的艄自由詡撷制盒刪,掘帙緊题饨念辭縑流、六点定位原则一个尚未定位的工件,其位置是不确定的。
如图 3-29所示,将未定位的的工件(长方体)放在空间直角坐标系中,长方体可以沿 X 、Y 、Z 轴移动有不同的位置,也可以 绕X 、Y 、X 轴转动有不同的位置,分别用用以描述工件位置不确定性的 、、、 称为工件沿X 、Y 、Z 轴的移动自由度, 由度。
工件要正确定位首先要限制工件的自由度。
设空间有一固定点,长方体的底面与该点 保持接触,那么长方体沿Z 轴的移动自由度即被限制了。
如果按图3-30所设置六个固定 点,长方体的三个面分别与这些点保持接触,长方体的六个自由度均被限制。
其中XOY 平面上的呈三角形分布的三点限制了 、、三个自由度;YOZ 平面内的水平放置的两个点, 限制了、二个自由度;XOZ 平面内的一点,限制了 一个自由度。
6点定位原理
6点定位原理
6点定位是一种基于多点触控技术的定位方法。
它通过在屏幕上布置6个特定位置的传感器来捕捉用户手指的触摸。
这些传感器会感知到用户手指在屏幕上的位置,然后将这个信息传递给设备的操作系统。
在设备的操作系统中,会使用一些算法来计算并确定用户手指触摸的准确位置。
通过使用多点触控技术,6点定位可以实现更准确的触摸定位,从而提供更流畅的用户体验。
6点定位的原理是基于传感器的运作方式。
这些传感器使用了电容感应技术,它们会感应到用户手指触摸的位置,并将这个位置信息转换成电信号。
然后,设备的操作系统会解读这些电信号,并计算出用户手指触摸的具体位置。
通过使用6个传感器,设备可以获得更多的触摸信息,从而提供更精确的定位。
这种多点触控的定位方法可以广泛应用于触摸屏设备,如智能手机、平板电脑和触摸屏电脑等。
六点定位原理的概念
六点定位原理的概念六点定位原理是一种用于确定物体在三维空间中位置和姿态的方法。
它基于物体上至少六个不同位置的标记点,通过测量这些标记点在相机或传感器视野中的二维坐标,并结合相机或传感器的内外参数,可以计算出物体在三维空间中的位置和姿态。
六点定位原理的基本概念是通过标记点在不同位置的二维坐标来进行三维定位。
这些标记点可以是特殊的标记物、传感器或者其他设备,它们在物体表面或周围被放置,用于被相机或传感器检测和测量。
这些标记点的位置需要在事先进行标定或者测量,以便在后续的定位过程中使用。
在进行六点定位时,需要获取至少六个标记点在相机或传感器视野中的二维坐标。
通过相机或传感器的内外参数,可以将这些二维坐标转换为三维空间中的坐标。
内参数包括相机或传感器的焦距、畸变参数等,外参数包括相机或传感器的位置、姿态等。
这些参数可以通过标定或者测量来获取。
一旦获得了标记点在三维空间中的坐标,就可以计算物体在三维空间中的位置和姿态。
通常使用的方法是通过最小二乘法或其他优化算法,将标记点的三维坐标与相机或传感器测量得到的二维坐标进行匹配,从而得到最优的物体位置和姿态。
六点定位原理在计算机视觉、机器人导航、增强现实等领域有广泛的应用。
它可以用于物体跟踪、姿态估计、三维重建等任务。
通过使用多个标记点,六点定位原理可以提高定位的准确性和稳定性,同时也可以应对物体遮挡、视角变化等问题。
总之,六点定位原理是一种基于标记点在不同位置的二维坐标进行三维定位的方法。
它通过相机或传感器的内外参数,将标记点的二维坐标转换为三维空间中的坐标,并计算出物体在三维空间中的位置和姿态。
这种方法在多个领域都有广泛的应用。
六点定位原则

上节课 回顾
一、工件定位的概念: 定位 在加工前,先确定工件在工艺系统中的正确位置。
实际加工中,只要考虑作为设计基准的点、 线、面 是否在工艺系统中占有正确有位置。
上节课 回顾
二、定位与夹紧: 夹紧
在加工过程中,为防止工件在切削力、重力、惯性 力等的作用下发生位移或振动,以免破坏工件定位。
因此,按照工件加工要求确定工件必须限制 的自由度数是工件定位中应解决的首要问题。
四、定位的分类
四、定位的分类
1、完全定位
大端面限制: X 方向的移动自由度 Y、Z的转动自由度
短销限制: Y、Z方向的移动自由度
防转销限制: X位 完全定位的概念:
六个自由度均被限制的定位方式称为完全定位。
六点定位原理的两点说明
二、关于定位方向的确定
在外力作用下, 与基准紧密结触
我们认为工件在某个方向的自 由度被限制了,就是在该方向上 有了正确的位置,并不表示在受到 脱离支承点的外力的作用下也不运动
二、常用定位元件能限制的自由度数
二、常用定位元件能限制的自由度数
外圆柱面
三、由工件加工要求确定工件应限制的自由度数 生产现场
四、定位的分类 2、不完全定位(部分定位)的概念
根据零件加工要求实际限制的自由度数少于六 个的定位方法称为不完全定位.
四、定位的分类 举一反三 考考你
应该限制: Z方向的移动自由度 X、 Y 的转动自由度
四、定位的分类 3、过定位
一夹一顶 夹持部分较长
重复限制: Y、Z 方向转动自由度
夹持较长卡盘相关于套筒限制: Y、Z方向的移动自由度 Y、Z的转动自由度
夹紧和定位是两个概念
上节课 回顾
六点定位规则

目
录
六点定位原则
92
六点定位原则
六点定则
任何一个物体在空间直角坐标系中都有
6 个自由度,用 X ,Y , Z , X ,Y , Z 表示。
要完全确定其空间位置,就需要限制其6 个自由度。
将6个支承抽象为6个“点”,6个点限
制了工件的6个自由度。
X
Z
六点定位原则
Y
3
六点定位原则 六点定则
用适当分布的六个支承点消除工件的六个自由度,使工件在夹具中 位置完全确定,这个原则称为六点定位原则(又称六点定则)。
4
六点定位原则 六点定则
注意: 六个支承点必须适当分布
5
六点定位原则 六点定则
三个支承点在一直 线上,没有限制三 个自由度
如图,工件底面上的三个支承点限制了 大,定位越稳。
7
THANSKS FOR LOOKING
,它们应放成三角形,三角形面积越
工件侧面上的两个支承点限制 由度便不能限制。
,它们不能垂直放置,否则,工件绕Z轴的角度自
支承点的分布必须合理,否则六个支承点限制不了工件的六个自由度,或不能有效由度与工件六点定位
六点定则是工件定位的基本法 则,用于实际生产时,起支承 点作用的是一定形状的几何体 ,这些用来限制工件自由度的 几何体就是定位元件。
简述六点定位原理
简述六点定位原理六点定位原理是一种基于地理坐标的定位方法,常用于导航系统和地图应用中。
该原理通过收集多个位置信息,并利用数学计算方法确定用户的具体位置。
下面将简述六点定位原理及其相关参考内容。
1. GPS定位GPS(全球定位系统)是一种基于卫星定位的技术,利用地球上的卫星系统和接收设备,能够精确测量用户的位置坐标。
通过收集卫星信号并进行计算,可以确定用户在全球范围内的准确位置。
参考内容:美国国防部的GPS官方网站提供了关于GPS技术的详细介绍和参考资料,包括GPS原理、技术规范和应用案例等。
2. 基站定位基站定位是通过手机信号基站的信号强度和时延来确定用户的位置。
手机设备与基站之间的信号强度和时延会根据用户的位置而有所不同,因此可以利用这些数据来定位用户。
参考内容:《手机基站定位原理及其应用》是一本介绍手机基站定位原理和相关应用的书籍,可以提供该定位原理的详细介绍和案例分析。
3. Wi-Fi定位Wi-Fi定位利用用户附近的Wi-Fi信号查询数据库来确定用户的位置。
通过收集用户附近的Wi-Fi信号,并与预先存储的Wi-Fi数据库进行匹配,可以确定用户的位置坐标。
参考内容:Wi-Fi定位技术的详细介绍和应用案例可以在《无线定位技术与应用》一书中找到。
4. 地磁定位地磁定位是通过采集用户周围地球磁场的信息来确定位置。
地球磁场在不同位置有所差异,通过测量地磁数据,并与地磁数据库进行匹配,可以确定用户的位置。
参考内容:《地磁定位技术原理与应用》是一本介绍地磁定位原理和应用的书籍,提供了详细的技术解释和案例分析。
5. 蓝牙定位蓝牙定位是通过蓝牙信号的强度和时延来确定用户的位置。
与基站定位类似,蓝牙设备与用户间的信号会有所差异,可以利用这些数据来定位用户。
参考内容:《蓝牙定位原理与应用技术》是一本详细介绍蓝牙定位原理和应用的书籍,提供了相关技术的详细解释和应用实例。
6. 视觉定位视觉定位是通过识别用户周围的景物、建筑物或地标来确定用户的位置。
什么是六点定位原理
什么是六点定位原理
六点定位原理是一种用于确定物体位置的方法,它通过测量物体与已知六个点的距离来确定其准确位置。
这种原理在地理定位、导航系统以及工程测量中被广泛应用,是一种非常有效的定位方法。
首先,六点定位原理需要明确六个已知点的准确位置和它们之间的距离。
这些已知点可以是地理上的标志性建筑物、地形特征或者人工设置的标志物,它们的位置必须是准确且稳定的。
然后,通过测量物体到这六个点的距离,利用三角定位原理来计算出物体的准确位置。
这种方法可以保证定位的准确性和稳定性,特别适用于需要高精度定位的领域。
六点定位原理的优势在于它可以通过多个点的测量来消除误差,提高定位的精度。
同时,由于使用了多个点的信息,即使其中一个点出现误差,也不会对整体定位结果造成太大影响。
这种方法的稳定性和可靠性是其他定位方法所无法比拟的。
在实际应用中,六点定位原理可以应用于各种领域。
在地理定位中,利用地标建筑物和地形特征作为已知点,可以实现对目标位置的准确定位。
在导航系统中,通过多个卫星信号的接收和处理,可以实现对车辆或者航空器的精确定位。
在工程测量中,通过设置固定的测量点,可以实现对建筑物或者地形的精确测量和定位。
总之,六点定位原理是一种非常有效的定位方法,它通过多点测量消除误差,提高定位精度和稳定性。
在各种领域的实际应用中都有着重要的作用,是现代定位技术中不可或缺的一部分。
通过深入理解和应用六点定位原理,可以更好地实现对目标位置的准确定位,为各种领域的发展和应用提供重要支持。
六点定位法则

六点定位法则的正确理解与应用六点定位法则是指导夹具设计的基本原则,已沿用了几十年,但法则本身并不完善,对法则的理解和应用也存在许多混乱之处,因此有必要对六点定位法则进行再探讨。
1.传统六点定位法则的含义工件定位的实质就是使工件在夹具中占据确定的位置,因此工件的定位问题可转化为在空间直角坐标系中决定刚体坐标位置的问题来讨论。
在空间直角坐标系中,刚体具有六个自由度,即沿X、Y、Z轴移动的三个自由度和绕此三轴旋转的三个自由度。
用六个合理分布的支承点限制工件的六个自由度,使工件在夹具中占据正确的位置,称为六点定位法则。
人们在阐述六点定位法则时常以图1所示铣不通槽的例子来加以说明:a1、a2、a3三个点体现主定位面A,限制X、Y方向的旋转自由度和Z方向的移动自由度;a4、a5两个点体现侧面B,限制X方向的移动自由度和Z方向的旋转自由度;a6点体现止推面C,限制Y方向的移动自由度。
这样,工件的六个自由度全部被限制,称为完全定位。
当然,定位只是保证工件在夹具中的位置确定,并不能保证在加工中工件不移动,故还需夹紧。
定位和夹紧是两个不同的概念。
图12.传统六点定位法则存在的问题(1)a1~a6在有的专著中称为六个定位点,在有的文献中则称为六个支承点,事实上这是两个不同的概念。
支承点应是安装在夹具上直接与工件接触的具体定位元件,如支承钉、支承板、V形块等,在加工过程中它们还要参与平衡切削力、重力、夹紧力等;而定位点应是一个抽象概念,是指定位方式对自由度的限制。
限制一个自由度称为一个定位点,与支承点的多少无关。
例如,工件直接以平面定位时,应限制三个自由度,只应有三个定位点,而事实上此时的支承点远不止三个。
而且在一些特殊情况下,工件定位时根本就无具体的支承点,如常见的在车床上用四爪卡盘夹紧工件,用千分表找正,此时并没有具体的支承点参与定位,工件位置的确定是由千分表来完成的,这种定位方式在无支承点的情况下同样可以实现定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.不完全定位和欠定位 工件在夹具中定位,若六个自由度没有被全部限制时,称为部分 定位。 (1) 有些工件,根据加工要求,并不需要限制其全部自由度,称 为不完全定位。 (2) 当定位点少于工件应该限制的自由度,使工件不能正确定位 时,称为欠定位。欠定位不能保证加工要求,往往会产生废品,因 此是绝对不允许的。
二、限制工件自由度与加工要求的关系 工件在夹具中定位时,并非所有情况都必须限制六个自由度,这 主要取决于本工序的加工要求。对空间直角坐标系来说,工件在某 个方面有加工要求,则在那个方面的自由度就应予以限制。 1.完全定位 工件的 6 个自由度全部被限制,它在夹具中的位置是唯一的,称 为完全定位。
三、必须正确处理过定位 工件在夹具中定位,若几个定位支承点重复限制同一个或几个自 由度时,称为过定位。一般来说,形状精度和位置精度很低的毛坯 表面作为定位表面不允许出现过定位;已加工过的工件表面或精度 较高的毛坯表面作为定位表面时,为了提高工件定位的稳定性和刚 度允许采用过定位。 减少或消除过定位造成的不良后果,可采取如下措施: 1.改变定位元件的结构,定位元件在重复限制自由度的部分不起 定位作用。 2.撤消重复限制自由度的定位元件 3.提高工件定位基准之间以及定位元件工作表面之间的位置精度
六点定位原则
一、六点定位原则 当工件不受任何条件约束时,其位置是任意的、不确定的。从理论 力学中可以知道,一个在空间处于自由状态的刚体,具有六个自由 度。
在分析工件定位时,通常用一个支承点限制工件的一 个自由度,用合理分布的6个支承点限制工件的6个自由度, 使工件在夹具中的位置完全确定,这就是“六