ET实操考试题
工业机器人系统操作考试题(附答案)
工业机器人系统操作考试题(附答案)一、选择题(每题5分,共25分)1. 工业机器人系统主要由()组成。
A. 机器人本体B. 控制系统C. 执行系统D. 传感器答案:ABCD2. 以下哪种工业机器人属于串联机器人?A. SCARA机器人B. 圆柱坐标机器人C. 并联机器人D. 球坐标机器人答案:C3. 工业机器人的末端执行器一般用于实现()功能。
A. 搬运B. 装配C. 焊接D. 切割答案:ABCD4. 工业机器人常用的传感器有()。
A. 位置传感器B. 速度传感器C. 力传感器D. 视觉传感器答案:ABCD5. 工业机器人的编程语言主要包括()。
A. 示教编程B. 文本编程C. 图形编程D. 语音编程答案:ABC二、填空题(每题5分,共25分)1. 工业机器人按照坐标系类型可分为________、________和________三种类型。
答案:直角坐标机器人、圆柱坐标机器人、球坐标机器人2. 工业机器人的________主要用于实现工件的精确定位和搬运。
答案:末端执行器3. 工业机器人的________是指机器人执行某种操作时所需要的时间。
答案:运动时间4. 工业机器人的________主要用于检测机器人的运行状态和故障诊断。
答案:监控系统5. 工业机器人的________是指通过编程使机器人完成特定任务的过程。
答案:编程三、简答题(每题10分,共30分)1. 请简述工业机器人的主要组成部分及其作用。
答案:工业机器人的主要组成部分包括机器人本体、控制系统、执行系统、传感器等。
其中,机器人本体是机器人的基础结构,控制系统负责控制机器人的运动和操作,执行系统用于实现机器人的具体动作,传感器用于获取机器人和外部环境的信息。
2. 请简述工业机器人的编程方法。
答案:工业机器人的编程方法主要包括示教编程、文本编程和图形编程。
示教编程是通过人工操作使机器人完成特定动作,然后将动作序列存储在机器人控制器中。
文本编程是通过编写程序代码来控制机器人的运动和操作。
丰田技术员理论试卷(三)
第1页(共××页) 第2页(共××页)丰田T —TEP 一般维修 项目理论考试《丰田技术员》试题(三)考试时间:90分钟一、选择题(每题2分,共30分)1. 下列关于制动系统的叙述中,哪一项正确?a 。
通过调整总泵推杆来调整制动踏板后备行程.b 。
当调整制动踏板的高度时,必须调整踏板推杆。
c 。
调整制动踏板的自由行程后应调整制动踏板的高度。
d 。
为了检查制动踏板的最大后备行程,应在发动机停止并施加驻车制动时踩下踏板.2. 下图所示为检查鼓式制动器时涂润滑脂的部位,哪一项正确?a 。
制动衬片和制动鼓之间的接触面。
b 。
底板和制动蹄之间的接触面. c. 制动衬片的表面。
d 。
制动鼓和后车桥法兰之间的接触面.3. 下列关于转向系统的叙述中,哪一项正确?a 。
为检查动力转向的转向液是否泄漏,必须保持发动机运行,并使方向盘保持打满转超过10秒。
b 。
方向盘的自由行程根据方向盘在直线行驶时的位置来测量。
c 。
采用循环球式手动转向时,必须定期更换转向器壳体中的机油. d. 转向拉杆的球头过度磨损时,方向盘自由行程将减小。
4. 下列关于自动传动桥油位检查的叙述中,哪一项正确?a.发动机停止和冷机时检查自动传动桥油位。
b 。
发动机停止和暖机时检查自动传动桥油位.c 。
发动机怠速和自动传动桥油温大约75摄氏度时(华氏167 度),检查自动传动桥油位.d. 发动机怠速和暖机时检查自动传动桥油位。
5. 下图所示为车轮轴承松动的检查,哪一项正确?a 。
用手摇晃悬架连杆.b 。
用手摇晃横拉杆.c. 一只手放在轮胎顶部,另一只手放在轮胎底部推拉轮胎.d.转动轮胎。
6. 下列关于灯光检查的叙述中,哪一项正确?a 。
打开点火开关、上下操作转向信号开关的同时检查转向信号灯是否正常闪烁,以此来检查转向信号灯。
b 。
把灯控开关转到某一刻度并检查倒车灯是否亮起,以此来检查倒车灯。
工业机器人系统操作员测试题+参考答案
工业机器人系统操作员测试题+参考答案一、选择题1.工业机器人系统的核心部分是()A.机器人本体B.控制系统C.传感器D.执行器参考答案:B2.以下哪种不属于工业机器人的基本参数()A.工作速度B.重复定位精度C.负载能力D.理论功率参考答案:D3.工业机器人的末端执行器不包括以下哪部分()A.夹具B.传感器C.执行器D.机器人手臂参考答案:C4.以下哪种工业机器人应用最广泛()A.关节臂机器人B.直角坐标机器人C.圆柱坐标机器人D.SCARA机器人参考答案:D5.工业机器人编程中的“ Teach Pendant ”是指()A.示教 pendantB.编程 pendantC.操作 pendantD.维修 pendant参考答案:A6.工业机器人系统在运行过程中,若出现异常情况,应立即()A.报警并停止运行B.继续运行至任务完成C.自行调整以适应异常情况D.通知维修人员进行处理参考答案:A7.工业机器人的重复定位精度主要取决于()A.机器人本体B.控制系统C.传感器D.执行器参考答案:B8.在工业机器人系统中,下列哪种设备不属于输出设备()A.伺服电机B.减速器C.执行器D.夹具参考答案:B9.工业机器人系统的自适应能力主要取决于()A.机器人本体B.控制系统C.传感器D.执行器参考答案:B10.工业机器人系统在运行过程中,若出现故障,下列哪种处理方式最合适()A.立即停止运行,进行故障排查B.继续运行,等待维修人员处理C.自行调整以适应故障D.忽略故障,完成当前任务参考答案:A二、判断题1.工业机器人的本体结构对其性能指标没有影响。
()参考答案:×2.工业机器人的控制系统越复杂,其性能越优越。
()参考答案:√3.工业机器人的末端执行器可以完成各种复杂的动作。
()参考答案:√4.工业机器人的编程语言与人类语言相同。
()参考答案:×5.工业机器人的重复定位精度受到环境因素的影响。
()参考答案:√6.工业机器人系统在运行过程中,无需进行监控。
ET订单款打板基本知识练习题
ET订单款打板基本知识练习题
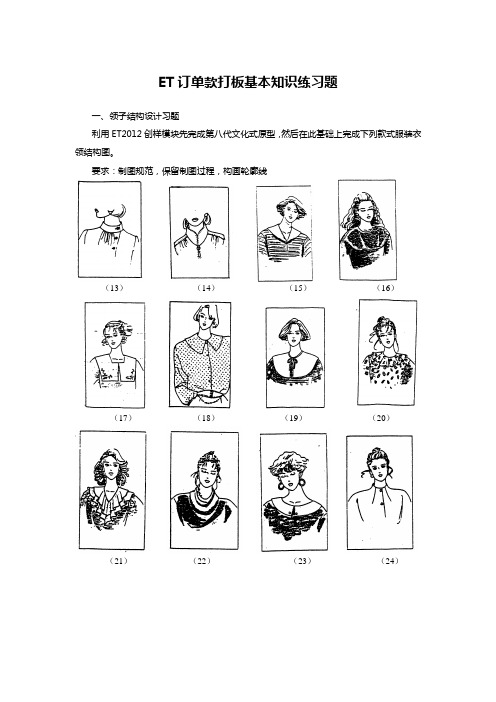
一、领子结构设计习题
利用ET2012创样模块先完成第八代文化式原型,然后在此基础上完成下列款式服装衣领结构图。
要求:制图规范,保留制图过程,构画轮廓线
(13)(14)(15)(16)
(17)(18)(19)(20)
(21)(22)(23)(24)
(25) (26) (27) (28)
(29) (30) (31) (32)
(33) (34) (35) (36)
(37) (38) (39) (40)
二、袖子结构设计习题 利用ET2012创样模块中的原型系统先制作衣身基本纸样,然后完成下列款式服装衣袖结构图。
要求:制图规范,保留制图过程,构画轮廓线
(13) (14) (15) (16)
(17) (18) (19) (20)
日升订单款打板基本知识练习题
评分标准
评分标准:评分过程中先分类、排序,再给出具体分数,根据实际情况试卷可分为五类,具体如下:
优秀:90—100,结构图准确无误,线条流畅,标记、尺寸、文字完
整无缺;
良好:80—89,结构图基本准确,线条基本流畅,标记、尺寸、文字比较完整;
较好:70—79,结构图有小错误,线条不太流畅,标记、尺寸、文
字有缺少;
及格:60—69,结构图有错误,线条不流畅,标记、尺寸、文字有
缺少;毛样图变更角有误,衣片拆分有较多错误。
不及格:0—59, 结构图不正确,线条不流畅,标记、尺寸、文字有
缺少;。
丰田技术员理论试卷(一)

丰田T-TEP 一般维修项目理论考试《丰田技术员》试题(一)考试时间:90分钟题号一二三四总分得分得分评卷人一、选择题(每题2分,共30分))A.用在底旁通系统中的恒温器是不带旁通阀的。
B.恒温器的功能是在发动机启动后暖机,以便调节冷却液温度。
C.恒温器提高了冷却液的沸点并对其加压。
D.恒温器通过改变冷却液浓度来调节温度。
2.下面所示游标卡尺的哪一个测量值是正确的?…………………()A. 50.00mmB. 45.75mmC. 45.15mmD. 45.25mm3.下面所示测微计上的哪一个测量值是正确的?…………………()A. 55.95mmB. 55.45mmC. 55.545mmD. 56.45mm 4.下列哪一条关于共轨型燃油喷射的陈述是正确的?…………( )A. 此系统按照加速器的开度角和发动机转速以机械方式控制燃油喷射正时。
B. 共轨储存经供油泵加温的燃油。
当燃油达到规定的温度值时,喷射器打开并喷油。
C. 共轨储存经供油泵加压的燃油。
ECU (电子控制单元)通过控制喷射器的开和关来确定燃油喷射量和正时。
D. 共轨将燃油和空气混合而ECU 根据加速器的开度角和发动机转速控制燃油喷射量。
5.关于常规型EFI 柴油机,以下哪句话是正确的?………………( )A. 该系统使用传感器检测加速器开度角和发动机转速并机械地确定燃油喷射量和正时。
B. 该系统使用传感器检测加速器开度角和发动机转速并使用电脑确定燃油喷射量和正时。
C. 该系统机械地检测加速器开度角和发动机转速并使用电脑确定燃油喷射量和正时。
D. 该系统使用传感器检测加速器开度角和发动机转速并使用电脑控制进气温度。
6.关于力矩变矩器,以下哪句话是正确的?………………………()A. 在变矩器中,泵叶轮转动使油液流动,从而将动力传递给涡轮转子。
B. 在变矩器中涡轮转子转动使油液流动,从而将动力传递给泵叶轮。
C. 和离合器一样,变矩器也能断开动力。
ET排料模块基础知识训练题及参考答案
ET排料模块基础知识训练题及参考答案
一、简述排料的基本操作过程?
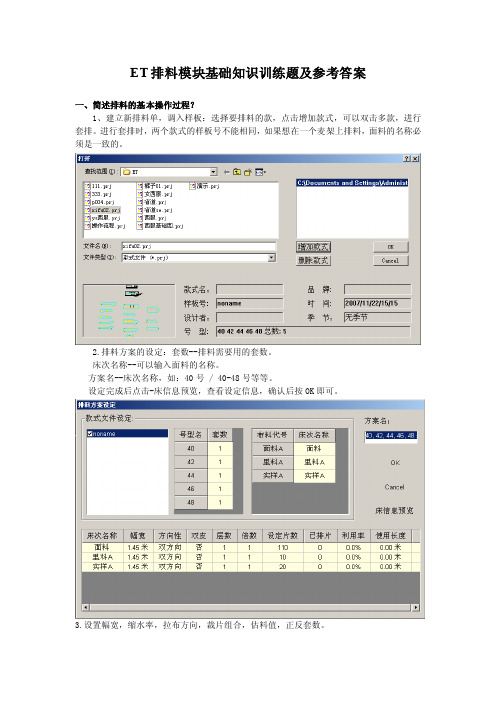
1、建立新排料单,调入样板:选择要排料的款,点击增加款式,可以双击多款,进行套排。
进行套排时,两个款式的样板号不能相同,如果想在一个麦架上排料,面料的名称必须是一致的。
2.排料方案的设定:套数--排料需要用的套数。
床次名称--可以输入面料的名称。
方案名--床次名称,如:40号 / 40-48号等等。
设定完成后点击-床信息预览,查看设定信息,确认后按OK即可。
3.设置幅宽,缩水率,拉布方向,裁片组合,估料值,正反套数。
二、简述排料系统中的快捷键有哪些?
I:左右翻转。
O:上下翻转。
K:顺时针微调, L:逆时针微调。
<:顺时针45度旋转。
>:逆时针45度旋转。
空格:180旋转。
↑↓←→方向键。
三、简述排料中刀口的输出与显示?
如果在排料里看不见刀口,可以在‘画面控制’菜单下选择显示净样与刀口,输出时,在‘绘图仪’里设定布纹线和刀口形状,切割时必须是U型刀口。
在打印预览下可以看见刀口时一般输出就会有刀口了。
四、简述如何设定条纹?
设定格子布的格子参数。
数控车床实操试题(E卷)
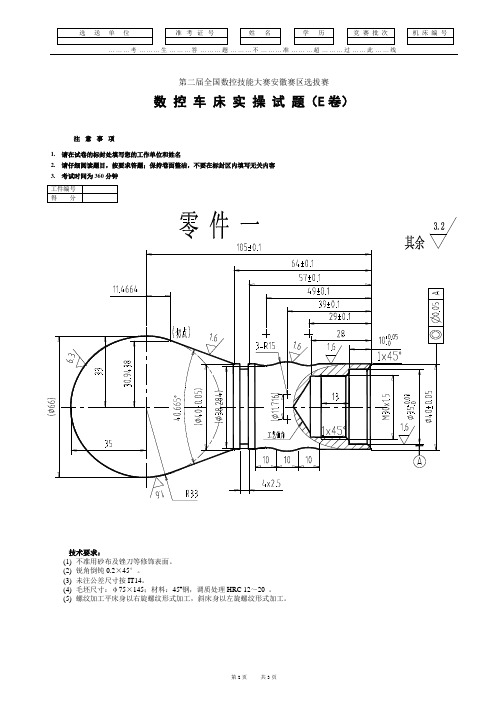
第二届全国数控技能大赛安徽赛区选拔赛
数控车床实操试题(E卷)
注意事项
1.请在试卷的标封处填写您的工作单位和姓名
2.请仔细阅读题目,按要求答题;保持卷面整洁,不要在标封区内填写无关内容
3.考试时间为360分钟
技术要求:
(1)不准用砂布及锉刀等修饰表面。
(2)锐角倒钝0.2×45°。
(3)未注公差尺寸按IT14。
(4)毛坯尺寸:φ75×145;材料:45#钢,调质处理HRC 12~20 。
(5)螺纹加工平床身以右旋螺纹形式加工,斜床身以左旋螺纹形式加工。
第二届全国数控技能大赛安徽赛区选拔赛
数控车床实操试题(E卷)
技术要求:
(1)
(2)锐角倒钝
(3)
(4)毛坯尺寸:φ75×85;材料:45#钢,调质处理HRC 12~20 。
(5)螺纹加工平床身以右旋螺纹形式加工,斜床身以左旋螺纹形式加工。
第二届全国数控技能大赛安徽赛区选拔赛
数控车床实操评分标准(E卷)。
工业机器人系统操作员测试题(含答案)
工业机器人系统操作员测试题(含答案)一、选择题(每题5分,共25分)1. 工业机器人系统主要由()组成。
A. 机器人本体、控制系统、执行系统B. 机器人本体、控制系统、传感器C. 机器人本体、控制系统、编程设备D. 机器人本体、控制系统、能源系统答案:B2. 以下哪一项不是工业机器人的主要技术参数?A. 重复定位精度B. 安装高度C. 最大搬运速度D. 手腕旋转角度答案:B3. 工业机器人的末端执行器主要包括()。
A. 电磁阀、气缸、伺服电机B. 夹具、抓手、专用工具C. 传感器、控制器、执行器D. 驱动器、减速器、联轴器答案:B4. 工业机器人的编程方式不包括()。
A. 示教编程B. 离线编程C. 语音编程D. 视觉编程答案:C5. 工业机器人在运行过程中出现故障,以下哪项不是故障排除的首要步骤?A. 停止机器人运行B. 切断电源C. 检查机器人本体D. 重新启动机器人答案:D二、判断题(每题5分,共25分)1. 工业机器人的重复定位精度越高,其性能越优越。
()答案:√2. 工业机器人的手腕旋转角度越大,其应用范围越广泛。
()答案:√3. 工业机器人的末端执行器一定是用来抓取物体的。
()答案:×4. 示教编程是工业机器人编程中最简单的方式。
()答案:√5. 工业机器人故障排除时,可以先从软件方面进行检查。
()答案:√三、简答题(每题10分,共30分)1. 请简述工业机器人的主要技术参数。
答案:工业机器人的主要技术参数包括重复定位精度、安装高度、最大搬运速度、手腕旋转角度等,这些参数直接影响机器人的性能和应用范围。
2. 请简述工业机器人的末端执行器的作用。
答案:工业机器人的末端执行器主要用于与物体接触、抓取、搬运和放置等操作。
根据不同的应用场景,末端执行器可以采用夹具、抓手、专用工具等形式。
3. 请简述工业机器人编程的主要方式。
答案:工业机器人的编程方式主要包括示教编程、离线编程、语音编程和视觉编程等。
涡流检测et换证试题
涡流检测et换证试题选择题(将认为正确的序号字母填入题后面的括号内,只能选择一个答案)1.对下述工件可采用涡流检测的是(d)a)铝合金锻件的热处理质量b)碳钢的材料分选c)导电材料的表面缺陷d)以上都可以2.在下面几个检测对象中指出能用涡流检测的对象(e)a.铝铸件表面裂纹b.钢表面淬火硬度不均匀度c.铸钢中心部位孔穴d.钢焊缝的母材与熔敷金属界面e.除c以外都可以3.在下面几个检测对象中指出能用涡流检测的对象(d)a.金属表面涂层厚度的测定b.钢的剩磁磁通密度的测定c.碳钢钢种的鉴别d.除b以外都可以4.在下面几个检测对象中指出能用涡流检测的对象(e)a.有机玻璃管b.铝管c.石墨管d.奥氏体钢管e.除a以外都可以5.涡流试验的原理是(B):A.磁致伸缩;B.电磁感应;C.压电能量转换;D.磁通势6.涡流检测技术可以用来测量(D):A.涂层厚度:B.镀层厚度;C.薄板厚度;D.以上都是7.涡流检测法最常用于(e):a)结构陶瓷材料b)黑色金属材料c)有色金属材料d)石墨材料e)B和C8.涡流检测的原理是(c):a)磁致伸缩b)压电能量转换c)电磁感应d)电致伸缩9.涡流检测的原理是(c):a)磁致伸缩b)压电效应c)电磁感应d)磁畴转动10.从原理上讲,下列材料中不能采用涡流检测的是(a):a)玻璃钢b)工具钢c)不锈钢d)轴承钢11.下面哪种频率产生的涡流渗透深度最大?(c):a)lMHzb)100HZ c)10KHzd)10MHz12.用来描述试样与探头线圈之间距离变化引起电磁耦合变化所产生的影响的术语是(D)A.填充系数;B.边缘效应;C.端头效应;D.提离效应13.用来描述在非常高的频率下涡流仅限于导体极薄外层流动的现象的术语是(A)A.趋肤效应;B.高频滤波;C.低频滤波;D.以上任一个14.IACS是下面哪一条的公认缩写?(D)A.感应交流电系统;B.感应激发比较系统;C.内加电流系统;D.国际退火铜单位制15.表示阻抗的常用符号是:(A):A.Z;B.x;C.R;D.Xc16.表示电导率的常用符号是:(B):A.u;B.p;C.X1;D.R17.表示磁导率的常用符号是:(A):A.u;B.Xi;C.p;D.R18.材料中的磁感应强度常用什么表示?(C):A.符号u;B.符号p;C.字母B;D.字母H19.涡流试验线圈的磁化力通常用什么表示?(D):A.符号u;B.符号p;C.字母B:D.字母H20.将一个磁性材料放于加有磁化力(H)的区域中时,材料中的磁感应强度(B)是以哪种方式产生的?(A)A.感应;B.传导;C.热传输;D.磁畴移动21.界限频率f。
车工技能考试试题(带答案)et
车工考试试题(含答案)一、单项选择题1.主轴零件图中径向尺寸均以( D )作为标注尺寸的基准。
A、细实线B、轮廓线C、粗实线D、轴心线2.直径为30的单头轴向模数为2的蜗杆,它的螺旋升角角是( C )。
A、3°56’20’’B、3°26’45’’C、4°23’55’’D、4°30’48’’3.加工( D )材料或硬度较低的材料时应选择较大的前角。
A、难加工B、脆性C、铝D、塑性4.在满足加工主要求的前提下,采用( A )可简化定未装置。
A、部分定位B、欠定位C、重复定位D、过定位5.精车时,为减小工件表面( C )值,一定要选择较小的副偏角。
A、精度B、尺寸C、粗糙度D、位置6.强力车削时自动进给停止的原因之一是CA6140 型车床溜板箱内D( )机构的弹簧压力过松。
A、夹紧B、互锁C、齿轮D、过载保护7.测量偏心距时的量具有百分表、活动表架、检验平板、( D )形架、顶尖等。
A、OB、TC、YD、V8.梯形外螺纹的( C )用字母“D2”表示。
A、内孔B、小径C、中径D、公称直径9.连接盘零件图中表面粗糙度要求最高的是 RA 1.6( A )。
A、μmB、mmC、DmD、nm10.A 138. B 139. A A、垂直度 B、角度 C、粗糙 D、位置度11.双重卡盘装夹工件安装方便,不需调整,但它的刚性较差,不宜选择较大的( D),适用于小批量生产。
A、车床B、转速C、切深D、切削用量12.梯形螺纹牙形半角误差一般在( B )。
A、±40′B、±20′C、0.5°D、±5′13.坐标系内几何点位置的坐标值均从坐标原点标注或( C ),这种坐标值称为绝对坐标。
A、填写B、编程C、计量D、作图14.硬质合金车刀加工( A )时前角一般为0°~5°。
A、碳钢B、白铸铁C、灰铸铁D、球墨灰铸铁15.编制数控车床加工工艺时,要进行以下工作:分析工件( C )、确定工件装夹方法和选择夹具、选择刀具和确定切削用量、确定加工路径并编制程序。
工业机器人系统操作试题+参考答案
工业机器人系统操作试题+参考答案一、选择题(每题10分,共50分)1.工业机器人系统主要由()组成?A.机器人本体B.控制系统C.执行系统D.传感器答案:ABD2.以下哪个不是工业机器人的主要类型?A.焊接机器人B.喷涂机器人C.搬运机器人D.医疗机器人答案:D3.工业机器人的末端执行器主要包括()?A.夹具B.吸盘C.电磁铁D.以上都是答案:D4.工业机器人的运动控制主要包括()?A.关节控制B.位置控制C.速度控制D.力控制答案:ABCD5.以下哪个不是工业机器人常见的传感器?A.编码器B.光电传感器C.触摸传感器D.视觉传感器答案:C二、填空题(每题10分,共50分)1.工业机器人系统的核心部分是_______,它负责控制机器人的运动和执行任务。
答案:控制系统2.工业机器人的末端执行器主要用于实现对工件的_______。
答案:抓取、搬运、装配等操作3.工业机器人的_______是指机器人各个关节的运动速度。
答案:速度控制4.工业机器人的_______是指通过传感器获取环境信息,并对机器人进行智能控制。
答案:视觉系统5.工业机器人的_______是指通过编程实现对机器人运动轨迹和动作的规划。
答案:运动规划三、简答题(每题20分,共60分)1.请简述工业机器人的主要组成部分及其作用。
答案:工业机器人的主要组成部分包括机器人本体、控制系统、执行系统、传感器等。
机器人本体是机器人的基础结构,包括关节、连杆等;控制系统负责控制机器人的运动和执行任务;执行系统包括驱动器和伺服电机,用于实现机器人的运动;传感器用于获取环境和工件的信息,实现对机器人的智能控制。
2.请简述工业机器人的运动控制方法及其应用。
答案:工业机器人的运动控制方法主要包括关节控制、位置控制、速度控制和力控制。
关节控制是通过控制机器人的关节角度来实现运动;位置控制是通过控制机器人的末端执行器在空间中的位置来实现运动;速度控制是通过控制机器人的运动速度来实现运动;力控制是通过控制机器人的作用力来实现运动。
电梯t证实操考试题目和答案

电梯t证实操考试题目和答案一、单项选择题(每题1分,共10分)1. 电梯的额定速度是指()。
A. 电梯的最大速度B. 电梯的最小速度C. 电梯在额定载重量下的速度D. 电梯在空载时的速度答案:C2. 电梯的平衡系数是指()。
A. 对重侧重量与轿厢侧重量的比值B. 对重侧重量与轿厢侧重量的差值C. 对重侧重量与轿厢侧重量的和D. 对重侧重量与轿厢侧重量的乘积答案:A3. 电梯的制动器应()。
A. 始终处于打开状态B. 始终处于关闭状态C. 只有在电梯运行时才打开D. 只有在电梯停止时才关闭答案:B4. 电梯的紧急操作装置应()。
A. 只能由专业人员操作B. 只能由乘客操作C. 只能由电梯维修人员操作D. 任何人都可以操作答案:A5. 电梯的限速器的作用是()。
A. 限制电梯的最大速度B. 限制电梯的最小速度C. 限制电梯的载重量D. 限制电梯的运行次数答案:A6. 电梯的缓冲器应()。
A. 始终处于压缩状态B. 始终处于释放状态C. 只有在电梯冲顶或蹲底时才压缩D. 只有在电梯停止时才释放答案:B7. 电梯的门锁应()。
A. 始终处于打开状态B. 始终处于关闭状态C. 只有在电梯运行时才打开D. 只有在电梯停止时才关闭答案:B8. 电梯的超载保护装置应()。
A. 始终处于打开状态B. 始终处于关闭状态C. 只有在电梯超载时才打开D. 只有在电梯未超载时才关闭答案:D9. 电梯的照明和通风应()。
A. 始终处于关闭状态B. 始终处于打开状态C. 只有在电梯运行时才打开D. 只有在电梯停止时才关闭答案:B10. 电梯的紧急报警装置应()。
A. 始终处于打开状态B. 始终处于关闭状态C. 只有在电梯紧急情况下才打开D. 只有在电梯正常运行时才关闭答案:C二、多项选择题(每题2分,共10分)1. 电梯的维护保养应包括以下哪些内容?()A. 定期检查B. 定期润滑C. 定期更换易损件D. 定期清洁答案:ABCD2. 电梯的安全保护装置包括以下哪些?()A. 限速器B. 缓冲器C. 门锁D. 紧急操作装置答案:ABCD3. 电梯的紧急操作装置应包括以下哪些功能?()A. 紧急停止B. 紧急照明C. 紧急通话D. 紧急解锁答案:ABCD4. 电梯的超载保护装置应包括以下哪些功能?()A. 声音报警B. 灯光报警C. 停止电梯运行D. 限制电梯开门答案:ABC5. 电梯的照明和通风应满足以下哪些要求?()A. 照明应足够明亮B. 通风应足够畅通C. 照明和通风应自动控制D. 照明和通风应手动控制答案:ABC三、判断题(每题1分,共10分)1. 电梯的额定速度可以超过制造商规定的最高速度。
工业机器人实训考试试题1 - 含参考程序

工业机器人实训考试试题11、作业任务:通过示教器(盒)对工业机器人进行操作、编程、调试,最终利用所编程序的自动运行,使工业机器人完成在料台和加工台之间的多次上、下料等搬运工作。
2、工艺要求:实现从料台与加工台间的单行上、下料各5次,使用1#手爪。
上料完成后,设定加工等待时间5S,然后开始下料。
Y正向平移,平移量96mm。
上料计数使用累加指令,下料计数使用累减指令。
3、设备器材:搬运机器人(工位1)1台、计时器1个。
4、考试用时:45分钟/人次/工位。
5、平面轨迹示意图:①②③④⑤①②③④⑤(料台)(加工台)上料①②③④⑤①②③④⑤(料台)(加工台)下料单行上、下料平面轨迹示意图6、考分分配及评分表:满分100分。
考分分配及评分表见附表。
序号:工业机器人实训考试1考分分配及评分表7、参考程序(示例程序8):—主/子程序—P000=-2.794532,-2.354631,2.188341,0.003075,90.157050,0.001526,0.000000,0.000000;P001=-63.710039,25.299595,-7.861327,4.556348,23.249510,125.626166,0.000000,0.000000;P002=41.545406,3.321531,18.073557,45.076682,45.993369,16.956343,0.000000,0.000000;P003=-63.710039,26.567787,-24.203067,2.900811,38.293129,127.536598,0.000000,0.000000;P004=-58.026860,-16.387816,16.735965,-25.931263,54.361455,131.271836,0.000000,0.000000; P005=-7.803018,5.567475,-5.638086,43.137545,94.729901,-7.908513,0.000000,0.000000;P006=58.646248,-16.083230,24.034333,27.601415,46.612482,47.158405,0.000000,0.000000;P007=41.545406,2.731131,12.660845,41.393473,50.371408,22.474144,0.000000,0.000000; 0001 MAIN; //程序头0002 MOVJ P0 ,V20 ,Z0 ; //零点0003 SET R0 ,0 ; //给R0变量赋值为00004 SET R1 ,5 ; //给R1变量赋值为50005 SETE PX0 (0) ,0 ; //给PX0变量在各方向均赋值为0 0006 SETE PX1 (0) ,0 ; //给PX1变量在各方向均赋值为0 0007 SETE PX1 (2) ,96 ; //给PX1变量在Y方向正方向赋值为96 0008 SETE PX2 (0) ,0 ; //给PX2变量在各方向均赋值为0 0009 DOUT OT9 ,OFF ; //抓取输出信号关闭0010 DOUT OT8 ,ON ; //松开输出信号打开0011 WAIT IN8 ,ON ,T0 ; //松开到位输入信号延时-无限延时0012 DELAY T0.5 ; //延时0.5S0013 LAB0: //程序段标签00014 MOVJ P4 ,V20 ,Z0 ; //过渡点0015 SHIFTON PX0; //平移打开,平移量PX00016 MOVJ P3 ,V20 ,Z0 ; //过渡点0017 MOVL P1 ,V100 ,Z0 ; //料台抓取点0018 DOUT OT8 ,OFF ; //松开输出信号关闭0019 DOUT OT9 ,ON ; //抓取输出信号打开0020 WAIT IN9 ,ON ,T0 ; //抓取到位输入信号延时-无限延时0021 DELAY T0.5 ; //延时0.5S0022 MOVL P3 ,V100 ,Z0 ; //过渡点0023 SHIFTOFF; //平移关闭0024 MOVJ P4 ,V20 ,Z0 ; //过渡点0025 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0026 MOVJ P6 ,V20 ,Z0 ; //过渡点0027 SHIFTON PX0; //平移打开,平移量PX00028 MOVJ P7 ,V20 ,Z0 ; //过渡点0029 MOVL P2 ,V100 ,Z0 ; //加工台放置点0030 DOUT OT9 ,OFF ; //抓取输出信号关闭0031 DOUT OT8 ,ON ; //松开输出信号打开0032 WAIT IN8 ,ON ,T0 ; //松开到位输入信号延时-无限延时0033 DELAY T0.5 ; //延时0.5S0034 MOVL P7 ,V100 ,Z0 ; //过渡点0035 SHIFTOFF; //平移关闭0036 MOVJ P6 ,V20 ,Z0 ; //过渡点0037 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0038 INC R0; //R0加10039 PX0 = PX0 + PX1 ; //PX0在Y方向正方向加960040 JUMP LAB0 ,IF R0 < 5 ; //R0值<5时,转到LAB00041 DELAY T5 ; //延时5S(延时加工完成)0042 LAB1 : //程序段标签10043 MOVJ P6 ,V20 ,Z0 ; //过渡点0044 SHIFTON PX2 ; //平移打开,平移量PX20045 MOVJ P7 ,V20 ,Z0 ; //过渡点0046 MOVL P2 ,V100 ,Z0 ; //加工台抓取点0047 DOUT OT8 ,OFF ; //松开输出信号关闭0048 DOUT OT9 ,ON ; //抓取输出信号打开0049 WAIT IN9 ,ON ,T0 ; //抓取到位输入信号延时-无限延时0050 DELAY T0.5 ; //延时0.5S0051 MOVL P7 ,V100 ,Z0 ; //过渡点0052 SHIFTOFF; //平移关闭0053 MOVJ P6 ,V20 ,Z0 ; //过渡点0054 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0055 MOVJ P4 ,V20 ,Z0 ; //过渡点0056 SHIFTON PX2 ; //平移打开,平移量PX00057 MOVJ P3 ,V20 ,Z0 ; //过渡点0058 MOVL P1 ,V100 ,Z0 ; //料台放置点0059 DOUT OT9 ,OFF ; //抓取输出信号关闭0060 DOUT OT8 ,ON ; //松开输出信号打开0061 WAIT IN8 ,ON ,T0 ; //松开到位输入信号延时-无限延时0062 DELAY T0.5 ; //延时0.5S0063 MOVL P3 ,V100 ,Z0 ; //过渡点0064 SHIFTOFF; //平移关闭0065 MOVJ P4 ,V20 ,Z0 ; //过渡点0066 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0067 DEC R1 ; //R1减10068 PX2 = PX2 + PX1 ; //PX2在Y方向正方向加96 0069 JUMP LAB1 ,IF R1 > 0 ; //R1值>0时,转到LAB10070 MOVJ P0 ,V20 ,Z0 ; //回零0071 # RET; //返回主程序0072 END; //程序结束0073 MOVJ P0 ,V20 ,Z0 ; //--0074 MOVJ P1 ,V20 ,Z0 ; //--0075 MOVJ P2 ,V20 ,Z0 ; //--0076 MOVJ P3 ,V20 ,Z0 ; //--0077 MOVJ P4 ,V20 ,Z0 ; //--0078 MOVJ P5 ,V20 ,Z0 ; //--0079 MOVJ P6 ,V20 ,Z0 ; //--0080 MOVJ P7 ,V20 ,Z0 ; //--0081 END; //--①②③④⑤①②③④⑤(料台)(加工台)上料①②③④⑤①②③④⑤(料台)(加工台)下料单行上、下料平面轨迹示意图。
工业机器人系统操作员四级实操练习题
1、智能机器人的所谓智能的表现形式是什么?答:推理判断、记忆2、机器人分为几类?答:首先,机器人按应用分类可分为工业机器人、极限机器人、娱乐机器人。
1)工业机器人有搬运、焊接、装配、喷漆、检验机器人,主要用于现代化的工厂和柔性加工系统中。
2)极限机器人主要是指用在人们难以进入的核电站、海底、宇宙空间进行作业的机器人,包括建筑、农业机器人。
3)娱乐机器人包括弹奏机器人、舞蹈机器人、玩具机器人等。
也有根据环境而改变动作的机器人。
其次,按照控制方式机器人可分为操作机器人、程序机器人、示教机器人、智能机器人和综合机器人。
3、机器人由哪几部分组成?机器人由三大部分六个子系统组成。
三大部分是机械部分、传感部分和控制部分。
六个子系统是驱动系统、机械结构系统、感受系统、机器人一环境交换系统、人机交换系统和控制系统。
4、什么是自由度?答:人们把构建相对于参考系具有的独立运动参数的数目称为自由度。
5、机器人技术参数有哪些?各参数的意义是什么?答:机器人技术参数有:自由度、精度、工作范围、速度、承载能力。
1)自由度:是指机器人所具有的独立坐标轴的数目,不包括手爪(末端操作器)的开合自由度。
在三维空间里描述一个物体的位置和姿态需要六个自由度。
但是,工业机器人的自由度是根据其用途而设计的,也可能小于六个自由度,也可能大于六个自由度。
2)精度:工业机器人的精度是指定位精度和重复定位精度。
定位精度是指机器人手部实际到达位置与目标位置之间的差异。
重复定位精度是指机器人重复定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示,它是衡量一列误差值的密集度(即重复度)。
3)工作范围:是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
4)速度;速度和加速度是表明机器人运动特性的主要指标。
5)承载能力:是指机器人在工作范围内的任何位姿上所能承受的最大质量。
承载能力不仅取决于负载的质量,而且还与机器人运行的速度和加速度的大小和方向有关。
ET裤子打板大体知识练习题
ET裤子打板大体知识练习题一、填空题1.裤长的测量从处向下量至长度2.裤腰围的放松量,女体一样在 cm,男体一样在 cm之间。
3.男、女西裤制图中,前片的竖向大体线条有、、和。
4.裤装一样需测量要紧部位有、、、、等.5.裤装结构制图中,一样前臀围计算公式前腰围计算公式、前裤口计算公式 .6.后翘事实上是和增加的量。
7.裤片内省一样男体操纵在 ,女裤操纵在。
8.人体的腹部省道应采纳臀围省道应采纳。
9.若是用15:X来表示后上档缝倾角,贴体裤X在之间,合体裤X在之间,宽松裤X在之间.10、裤装的后中线斜度增大,那么裆弯宽度增加,后翘。
二、选择题一、.裤子烫迹线平行于哪条线? ( )A.前裆直线B.前后腰线C.侧缝线D.下裆线二、落裆线什么缘故比上裆线下落1cm左右? ( )A.加长大裆长度B.为了蹲下方便C.增加臀部的放松量D.臀部外凸而需增加上裆的长度3、一样贴体牛仔裤、筒裤等束腰位置低于标准位置多少厘米?()A、0~1 cmB、2~3cmC、4~5cmD、5~6cm4.装腰裤改成低腰裤应如何进行结构调整?( )A.上裆减短,腰围变大B.上裆减短,腰围不变C.上裆不变,腰围不变D.上裆不变,裤长减短5.裤子的成品尺寸中膝围宽=24cm,裤口宽=20cm,这是什么裤型?( )A.锥型裤B.喇叭型裤C.筒型裤D.马裤三、判定题一、臀突越大,裤装越贴体时,后上裆缝斜度越小.( )2.女西裤前片两个褶裥的大小必需是相同的。
( )3.前后片臀围能够是相等的,也能够后片大于前片。
()4.前后裆宽的大小不能够随下档缝线前后移动而移动。
()5.总裆宽的大小能够在~之间转变( )6.中裆围和脚口围要紧关系到造型,其大小由样式而定( )7、烫迹线应在臀围的中线上,()八、臀突越大,裤装越贴体时,后上裆缝斜度越小。
()四、简述题一、如何解决裤子臀腰差的问题?二、裤子什么缘故要起翘?后翘大小会造成什么结果?3、中档线的转变与裤型有什么关系?4、简述裙裤的结构特点?ET裤子打板大体知识练习题参考答案一、填空题1.腰部最细、所需要的~2cm, 1~3cm3.侧缝线、烫迹线、前裆直线和下裆线 .4.腰围、臀围、档长、裤长、踝围.5. H/4-1cm 、W/4-1cm 、脚口/2-1 cm .6.后上档缝线、后裆弯的总长7. 1.5~2cm、 2~2.5cm.8.瘪型省、胖型省9. 4~五、~4、0~210. 增加二、选择题一、A 二、D 3、 B 4、 A 五、 A三、判定题一、×二、× 3、√ 4、×五、√六、√ 7、×八、×四、简述题一、由于人体的特点,臀围大于腰围,这种臀腰差所造成余量的处置那么是下装结构的关键问题。
2021年06月机器人一级实操
一、多选题 ------ 微信公众号《喵呜刷题》出品
1、关于齿轮说法正确的是?
A 大齿轮带动小齿轮起加速作用
B 大齿轮带动小齿轮起减速作用
C 该模型中最先连接手摇把手的是主动轮
D 该模型中主动轮要比从动轮大
2、搅拌器模型中有哪些机械结构?
A 轮轴
B 齿轮
C 滑轮
D 斜面
3、关于传动比说法正确的是?
A 该模型的传动比大于1
B 该模型的传动比小于1
C 要起到加速作用传动比应小于1
D 要起到加速作用传动比应大于1
4、关于轮轴下列说法正确的是?
A 轮轴相当于变形的杠杆
B 该模型中力作用在轮上
C 该模型中力作用在轴上
D 该模型中轮轴是省力杠杆
二、实操题 ------ 微信公众号《喵呜刷题》出品
5、搅拌器
搅拌器是我们经常使用的厨房用具,特点是:通过手摇把缓慢的转动,其顶端的机械能够快速的转动。
下面请考生制作一个搅拌器。
搭建要求
(1)具备搅拌器的大体结构框架;
(2)具备二级传动装置;
(3)有手摇及搅拌部分的机械展示;
(4)实现手摇部分低速转动,机械顶端高速旋转的效果。
案例样图
以下列举了相关器材模型样例,考生可任选其一作为参考。
【器材说明】样例器材选自经中国电子学会评审通过的全国青少年机器人技术等级考试一级、二级适用器材。
仅供参考,不作为考试评审的唯一依据。
正确答案:略。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ET实操考试题
班级:时量:180分钟
实操考题
请按照某企业款式要求(见附件一),运用ET进行制版、推板和排料。
要求:
1.按照规格表中(见附件二)的M码进行制版,裁片不可遗漏。
2.按照规格尺寸进行推板操作,共放5档,共6码;裆差按照各部位数据自行计算。
3.排料只排XS、M、L和XXL码,每码各排一套;面料幅宽为145厘米。
4.文件保存:推板格式为prj,排料格式为pla;保存格式为“***(姓名)+ET+后缀格式”。
5.文件上传:上传时间不能超过16:30,超时递交作品视为不合格,递交时间以电脑显示时间为准。
源文件格式:上传到QQ群。
图片格式上传到:图片格式分为推板图和排料图http://
附件一:款式图
附件二:结构参考图附件三:规格尺寸表。