迷宫机器人的硬件结构设计
《机器人走迷宫》课件

目录
CONTENTS
• 迷宫简介 • 机器人走迷宫的原理 • 机器人走迷宫的实现 • 机器人走迷宫的应用场景 • 未来展望与挑战
01 迷宫简介
迷宫定义与特点
迷宫定义
迷宫是一种具有复杂路径和障碍 物的立体结构,旨在测试和挑战 行进者的方向感和导航能力。
迷宫特点
迷宫通常由墙壁、走廊、死胡同 和交叉路口组成,路径曲折且容 易让人迷失方向,需要一定的空 间感和方向感才能成功穿越。
在机器人收集和处理个人信息时,需要严格遵守隐私保护原则,确保用户的隐私权益得 到保障。
伦理规范
制定和实施机器人伦理规范,确保机器人的使用符合社会伦理和道德标准,防止滥用和 伦理风险。
商业应用与市场前景
工业自动化
机器人走迷宫技术在工业自动化领域具有广泛的应用前景 ,如生产线上的物料搬运、仓储物流等场景,可以提高生 产效率和降低人力成本。
测试与优化
模拟测试
在模拟环境中测试机器人 的性能,评估其走迷宫的 能力。
实际环境测试
在实际环境中测试机器人 的表现,根据测试结果进 行优化和改进。
性能评估
制定评估指标,对机器人 在走迷宫过程中的性能进 行量化评估。
04 机器人走迷宫的应用场景
娱乐与游戏
家庭娱乐
机器人走迷宫可以作为家庭娱乐活动,提供亲子互动和智力挑战。
深度学习
强化学习是一种机器学习技术,其中 智能体通过与环境互动来学习如何采 取最优行动。在机器人走迷宫的情境 中,强化学习可以用于训练机器人学 习如何选择最佳路径,以便在给定起 点和终点的情况下最快到达目的地。 通过反复试验和奖励机制,机器人可 以学会识别有效路径和避免无效路径 。
机器人工程硬件配置方案
机器人工程硬件配置方案一、硬件概况机器人是一种具有智能功能,可以执行各种任务的机械设备。
其核心是由硬件和软件组成的。
硬件是机器人的基础,决定了机器人的功能和性能。
因此,一个合理的硬件配置方案对于机器人的性能和功能有着至关重要的影响。
下面将详细介绍机器人工程的硬件配置方案。
二、硬件配置要求1. 高性能处理器机器人需要具有强大的计算和控制能力。
因此,需要选择一款高性能的处理器作为主控芯片。
一般来说,主控采用的CPU应该具备多核处理器,频率高,性能稳定,能够满足机器人各种任务的需求。
2. 多功能传感器机器人需要具备感知周围环境的能力,因此需要配备各种传感器。
例如,视觉传感器用于实现机器人的视觉识别和导航功能;声音传感器用于识别声音指令和环境声音;距离传感器用于检测前方的障碍物等。
因此,需要选择具有多功能的传感器,以满足机器人各种感知需求。
3. 高精度执行器机器人需要能够精确地执行各种动作和任务,因此需要具备高精度的执行器。
例如,舵机用于控制机器人的关节运动,需要具备高精度的位置控制和速度控制功能;电机用于实现机器人的移动和扭转,需要具备较大的扭矩和稳定的速度控制功能。
因此,需要选择高性能的执行器来满足机器人的各种运动需求。
4. 高效电源系统机器人需要提供稳定的电源供应,以保证其正常的工作和运行。
因此,需要选择高效的电源系统,满足机器人各种电能需求,并具备保护功能,保证机器人和使用者的安全。
5. 可拓展接口机器人需要能够与各种外部设备进行连接和通讯,以实现更加复杂和多样化的任务。
因此,需要具备各种可拓展接口,例如,USB接口用于连接外部存储设备和通讯设备;GPIO接口用于连接外部传感器和执行器;以太网接口用于连接局域网和互联网等。
因此,需要选择具有多种接口的硬件设备,以实现机器人的各种扩展需求。
三、硬件配置方案1. 处理器目前,市场上较为常用的机器人处理器有英特尔酷睿系列和NVIDIA Jetson系列。
机器人设计说明
机器人—南方小子设计及功能说明一.机器人设计所需部件我们制作的机器人所用到的部件:一个L293D驱动模块,四个直流电机,四个红外线反射传感器,一块AT89S52单片机,四个5.8cm小轮,一个万向轮,一个12MHz的晶振,导线若干,电容若干,芯片若干其中:直流电机1 驱动输出;直流电机 2 驱动输出;直流电机 3 驱动输出;直流电机 4 驱动输出;5V寻迹ARM 控制,可以方便的控制直流电机速度和方向可以方便的控制直流电机速度;单片机有四组接口可以为接红外避障接口。
二.机器人系统硬件设计1.电源模块设计根据材料我们选用两节3.6V锂电池作为输入电源,由于52单片机要求输入电压为+5V我们采用7805稳压后供电。
2.驱动模块设计我们所用的驱动模块为L293D驱动模块,可以直接驱动 4 路 3- 16V 直流电机,并提供了 5V 输出接口(最低只要6V),可以给 5V 单片机电路系统供电 ,支持3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制 2 相步进电机, 5 线 4 相步进电机。
驱动模块使用两个继电器和四个三极管为主要部件构成驱动电路。
可以分别控制四个电机正转.反转和停转。
其中四组信号线可以接入单片机。
3.红外线传感模块设计红外线传感模块主要有四个红外对管,电阻和发光二极管组成;三个红外线反射传感器作为机器人的寻迹功能使用,另外一个作为机器人的探头用以避障探测;红外对管由发射管和三极管组成,当遇到黑线没有反射时接收三极管不导通,相应输出端输出高电平,其他时刻接收三极管导通,输出端被下拉为低电平。
其红外探头接口有三条线组成:红线:接 4.5-5V 电源高电平黄色线:信号线,接单片机,输出 TTL 电平给单片机,用以测量红外光值黑线:GND 0V电源低电平4.附加硬件设备设计为了便于机器人更好越障和上坡,我们在机器人尾部附加设计一个万向轮,避免机器人在越障时后轮被卡在障碍物上以及防止机器人上坡时机器人后倒。
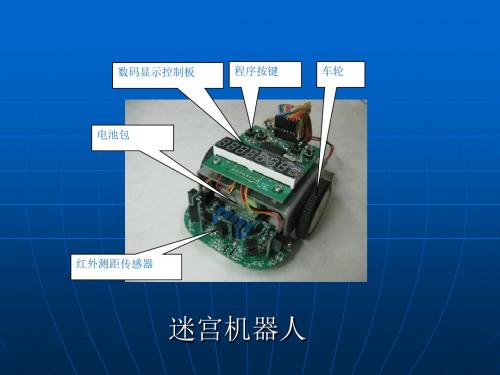
机器人走迷宫

湖北省水果湖高级中学 伍先军
拍摄:伍先军 曾少平 后期制作:伍先军 场景:湖北省水果湖高级中学机器人实验室 2010年9月
机器人三要素
机器人 左转
走迷宫机器人 程序策略(流程图)
机器人 直行
Follow Me! ——动手制作迷宫机器人
①搭建机器人----要保存机器人文件 ②编写程序----要保存程序文件 ③仿真比赛----能完成任务吗?用时多少?
Do It Yourself ! ——迷宫机器人DIY
迷宫机器人安装了3个红外避障传感器,是 不是太多了?
硬 件 要 求
机器人三要素 感知:传感器 决策:主控器 执行:执行器
软 件 要 求
起点 终点 机器人沿左墙走迷宫路线图
将传感器得到的信 息分析后向执行器 发出指令(软件) 在什么条件下直行 在什么条件下左转 在什么条件下右转
虚拟走迷宫机器人的组成(硬件)
主控器
(红外光)
传感器(3个红 外避障传感器) (数字信号)
分组研究:
[课题1]只用2个红外避障传感器,可行吗?
[课题2]只用1个红外避障传感器,可行吗?
Share & Enjoy ——分享与欣赏
[结论1]用2个红外避障传感器,可以完成任务
[我的定理1]红外避障传感器的安装位置与角度,对机器人有影响 [我的定理2]红外避障传感器的“半径”大小,控制着机器人与障 碍物距离的远近
感测系统
劳动对象
传感器
执行器
执行器 (2个轮子)
主控器
执行器 (2个马达)
基于微控制器H8/3052的迷宫机器人设计与实现
总第 2 1 2 期 20 0 8年第 3期
计算 机与数字工程
Co utr& Diia mp e gtlEngne i g i ern
V0 J l36 No. 3 11 6
基 于微 控 制 器 H / 0 2的 迷 宫 机 器 人 设 计 与 实 现 8 35
通 过传感 器 识 别 迷 宫 路 线 , 助 机 器 人 定 位 和 运 辅
列 和 T 3 0系列 。 MS 2 采用低 档次 的 C U, 发 难 度 小 , 是 芯 片 速 P 开 但
度较慢 , 且 没有 硬 件 可 以生成 P 并 WM 波 。性 价 比 适 中的是 8 C 9 K 0 16 C单 片 机 。现 在 国 际上 用 得 最
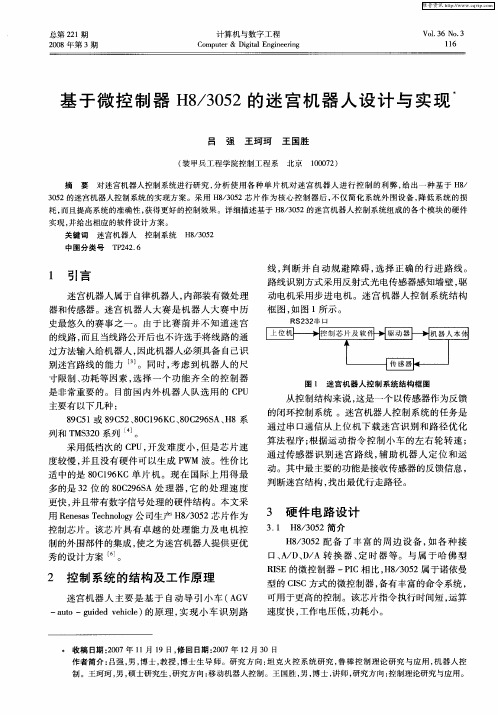
图 1 迷 宫 机 器 人 控 制 系 统 结 构 框 图
从控 制 结构来 说 , 这是 一个 以传 感器 作为 反馈 的闭环控 制 系统 。迷宫 机器 人控 制 系 统 的任务 是 通 过 串 口通 信从 上 位 机 下载 迷 宫 识 别 和路 径 优 化 算 法程序 ; 据运 动 指 令 控 制 小 车 的左 右 轮 转 速 ; 根
制 。王珂珂 , , 男 硕士研究生 , 研究方 向: 动机器人控制 。王 国胜 , , 移 男 博士 , 师 , 讲 研究方 向: 控制理论研究 与应用 。
维普资讯
第3 6卷 (0 8 第 3期 20 )
计算机 与数 字工程 Fra bibliotek17 1
H / 0 2的主要 性 能指标 如 下 : 835
多 的是 3 2位 的 8 C 9 S 处 理 器 , 的 处 理 速 度 0 26 A 它
动 。其 中最 主要 的功 能是接 收 传感器 的反 馈信 息 ,
“走迷宫的机器人”设计与制作

“走迷宫的机器人”设计与制作走迷宫的机器人是移动机器人路径规划算法的典型应用,在国际上迷宫机器人一直是控制领域和计算机领域的研究热点问题,文章结合迷宫机器人走迷宫的实际特点,对机器人走迷宫的一些算法进行了研究和改进,从而实现了机器人在无人为干预下自主走迷宫的目标。
标签:迷宫机器人;单片机;数据通信;智能化1 走迷宫的机器人设计的目的随着科学技术的高速发展,國内的教育和科研机构也日益关注机器人事业,有关科研工作在深度和规模上逐渐提高。
一些著名高校基本形成了完整的研究体系,对推动高校的科技创新和产学研一体化产生了重要作用,因此我们将设计一种机器人,能够在迷宫中寻找出最短路径。
2 走迷宫的机器人系统设计本设计以STC89C52单片机系统为控制中心,通过4路红外电路检测黑线,并保证小车能够按照黑线前行,而当单片机检测到需要转向的传感器信号时,单片机通过改变PWM波的占空比来调整小车两侧的电机转速,从而使其两侧轮产生速度差,以实现小车的转向。
同时超声波探测周围障碍物,并通过WIFI模块实时传输给计算机。
小车遍历整个迷宫区域,同时计算机绘制出迷宫概况,并用递归算法计算出最短路径。
3 走迷宫的机器人硬件设计3.1 总体硬件结构图说明:小车以STC89C52单片机控制器,采用红外传感器及其处理模块实现对黑线的循迹;通过单片机产生PWM波对电机进行驱动并通过转速对小车的方向和速度进行控制;用WIFI模块将小车周边障碍物情况传送给电脑,电脑经过运算后将最优路径传输回小车。
数据采集系统以单片机为控制核心,模拟实况、算法分析由计算机完成。
3.2 微处理器的选择单片机我们选用STC89C52,该单片机是宏晶公司推出的新一代单片机,指令代码完全兼容传统8051单片机;内部集成512字节RAM,具有EEPROM功能和看门狗功能,可上电擦除;通用I/O口32个,3个16位定时器/计数器,且功耗低。
对于该项目,晶振不能采用常用12兆晶振,否则通信时便会产生积累误差,进而产生波特率误差,影响通信的同步性。
迷宫电脑鼠的硬件设计简介

单独翘囊两者缀合成不阏性能的交换黼络结构来实现。根据交换网络入端 信道数与出端倍道数的不同,可以把交换网络分成集线器、扩线器和分配 嚣。
迷宫机器人简介
三、迷宫机器人场地简介
场地整体由木板组装面成,可以通过更改部分隔墙位置来实现场地变更 底板尺寸为1.5*1.5米,由不同长度的隔墙板与底板共同组合而成,每个通 道为168mm,隔墙高50mm,宽12mm 底板为黑色防滑表面,隔墙表面贴白色防火板,顶上贴红色边条
168mm
四、迷宫机器人规则简介
比赛时机器人可以将场地的任一个角作为起点,终点设置在场地正中。 比赛时选手通过程序控制机器人从起点出现,按顺序将场地上的所有通道 全部跑完再回到起点位置,并自动分析刚才所走路线中到达终点的最短路 线,然后沿着最短路线前进到达终区并再次返回起点,以到达目的地所用 的时间最少者为胜
五、迷宫机器人程序说明
◆模块化流程图式编程软件,直观明了 ◆支持流程图或C语言编程,可以直接将流程图转化为C语言 ◆编程模块可自由按横向或纵向对齐,简单方便 ◆模块间的连接线可以自行更改连接,便于不同阶段的用户使用 ◆支持自定义函数的导入
五、迷宫机器人程序说明
功能:初始化电脑鼠硬件,以及清零电脑鼠的记忆内存。 参数:双击设置四个参数,分别为初始X坐标、初始Y坐标、初始方 向、迷宫大小。相应地一般设置为0、0、MazeUP、8。
姿势修正的临界条件数据记录表
传感器 一侧墙壁(靠右) 左 左前 X12 X21 X41 X52 X22 X42 一侧墙壁(靠左) 两侧墙壁(靠右) 两侧墙壁(靠左)
中
右前 右
六、迷宫机器人使用说明
1)两侧都有墙壁时的姿态纠正策略 当两侧都有挡板时,且当电脑鼠处在如图6-1、图6-2所示位置时需要对电脑鼠 姿态进行纠正。其中,图6-1(a)和图6-2(a)分别表示电脑鼠的位置偏离了迷宫 中心(向左)和其姿态偏离了平行于墙壁的方向(向左),可以发现,这时左边 传感器信号强,右边的弱。电脑鼠应当向右转以回到理想的方位和姿态。同样, 图6-1(b)和图6-2(b)分别表示电脑鼠的位置偏离了迷宫中心(向右)和其姿态 偏离了平行于墙壁的方向(向右),这时右边传感器信号强,左边的弱。电脑鼠 应当向左转以回到理想的方位和姿态
智能迷宫小车设计方案

sbit P2_1=P2^1; //中右传感器
sbit P2_2=P2^2; //中间传感器
sbit P2_3=P2^3 //中间传感器
sbit P2_4=P2^4; //左侧传感器
turn1=P2|0xE0; //P2 用于检测路线 0xE0 屏蔽高位
switch(turn1)
{//寻线模块//
case 0xE4: advance(1)
黑 龙 江 科 技 大 学 center311 Lab 2 制 作 实 验 室 学生组 设 计
我们采用了五个传感器
前端三个为寻线,左右两个为路口检测
用三个传感器中间的在线上两侧分别骑线这样便于快速校正小车位置,而且中间传感器还用
于 90 度转弯时小车头部位置的确定。
寻线程序:
sbit P2_0=P2^0; //右侧传感器
***************电机选择及问题分析:*************** 电机为网上购买 220r/min 存在问题: 1 速度过快 2 采用蓄电池 惯性较大 3 两轮速度不均 右侧轮速度较慢 解决: 综上原因我们采用 pwm 调速,降低速度减小惯性影响,双 pwm 调速平衡两轮速度 pwm 采用 T0 定时器 工作模式 2 自动重载模式 (详细程序见 .c) 晶振 11.0592 TH0=0x9B
黑 龙 江 科 技 大 学 center311 Lab 2 制 作 实 验 室 学生组 设 计
总体设计
作品简介: 作品硬件主要分为 5 个模块:传感器模块、电机驱动模块、电源及稳压模块、主控模 块、车体框架。 软件部分:采用 C 语言编写
软件主要部分包括: (1)寻线函数 (2)pwm 调速函数 (3)1602 显示函数 (4)路口判断与记录函数 (5)最优路劲计算函数 (6)直角平角转弯函数 (7)时间记录函数 ****************传感器选择**************
迷宫机器人软件设计
摘要人类科技的进步促使机器人技术的智能化水平越来越高。
可移动机器人的路径规划是机器人研究中的一个重要领域,得到越来越多研究者的关注,并取得了丰厚的成果。
行进方向选择问题是智能机器人控制的关键技术之一,可移动机器人如何在复杂和未知的环境中自主选择路线到达目标地点,并躲避障碍物,是其重要的判断条件之一,也是功能实现的基础。
迷宫机器人是一种基于ARM1138的具备人工智能的小型机器人,可在没有人工干预的情况下,在16×16未知的迷宫中自行完成一系列动作。
看似简单的小型机器人,其中却包含了光学、力学、信息科学等多种学科的综合应用,是对机器智能化的实现。
本设计从软件设计的角度对迷宫机器人的智能控制做了较有深度的探讨。
通过软件编程,实现迷宫机器人的智能控制,完成在16×16的迷宫中,由起点自动探索到终点并探测返回,随后完成冲刺的功能。
论文中讲述的重点是迷宫机器人在路径选择中逻辑方面的判断,以及墙壁信息的获取和车身的控制。
关键词:人工智能;迷宫机器人;软件目录1绪论 (1)课题的研究背景和发展历程 (1)课题研究的目的和意义 (1)课题研究的主要内容 (1)本章小结 (1)2系统的总体设计 (2)计 (2)单片机和开发工具的选择 (3)单片机的选择 (3)开发工具的选择 (4)本章小结 (5)3迷宫机器人的软件设计 (6)迷宫介绍 (6)构 (6)起点坐标确实立 (6)主要外设的软件设计 (7)红外传感器的软件控制 (7)步进电机的软件控制 (8)迷宫机器人的姿势矫正 (9)双板的身姿矫正 (10)单侧板的身姿矫正 (10)直角拐弯 (11)车身后转 (13)本章小结 (13)4控制方式的实现 (14)等高图的制作与偏移量的判断 (14)探索法则 (15)基本法则 (15)中心法则的改进 (17)4.3本章小结 (19)5总结与展望 (20)参考文献 (21)附录 (22)1绪论进入21世纪,伴随着电子、信息技术的发展与迅速普及,人们对电子技术的要求也越来越高,智能化、信息化的高尖技术逐步融入人们的日常生活。
自动走迷宫的机器人设计与课程总结报告

自动走迷宫的机器人设计与课程总结报告一、引言随着人工智能和机器人技术的快速发展,自动走迷宫的机器人成为了研究的热点之一。
本课程旨在通过理论与实践相结合的方式,让学生掌握机器人设计的基本方法,并能够独立完成一个自动走迷宫机器人的设计和实现。
二、课程目标理解机器人设计的基本原理和方法。
学习迷宫问题的解决策略。
掌握传感器、控制器等机器人硬件的使用。
熟悉编程语言在机器人控制中的应用。
培养团队合作和项目管理的能力。
三、迷宫问题概述迷宫问题是一个经典的搜索问题,目标是在有限的空间内找到从起点到终点的路径。
在机器人领域,迷宫问题通常涉及到路径规划、障碍物避让等技术。
四、机器人设计硬件设计:包括传感器(如红外传感器、超声波传感器)、控制器(如Arduino或Raspberry Pi)、驱动器(如电机驱动器)和机械结构等。
软件设计:包括迷宫问题的算法实现(如深度优先搜索、广度优先搜索、A*算法等)和机器人控制程序的编写。
系统集成:将硬件和软件集成到一起,确保机器人能够按照预期工作。
五、课程实施理论学习:通过课堂讲授和阅读教材,学生学习机器人设计的理论知识。
实践操作:学生在实验室中进行机器人的组装和编程实践。
团队合作:学生分组进行项目开发,培养团队协作能力。
项目管理:学生需要制定项目计划,管理项目进度,确保按时完成任务。
六、项目实施需求分析:明确机器人的功能需求和性能指标。
方案设计:设计机器人的硬件架构和软件架构。
硬件组装:根据设计方案,选择合适的硬件组件进行组装。
软件开发:编写控制算法和机器人控制程序。
测试与调试:在迷宫环境中测试机器人的性能,进行必要的调试。
性能优化:根据测试结果,优化机器人的设计,提高其性能。
七、课程成果机器人原型:学生成功设计并实现了一个能够自动走迷宫的机器人原型。
技术报告:学生撰写了详细的技术报告,包括设计思路、实现过程和测试结果。
展示与交流:学生在课程结束时进行了项目展示,并与其他团队进行了交流。
基于光电传感器电路的迷宫机器人设计
( 甲兵 工 程 学 院 控 制工 程 系 , 京 1 0 7 ) 装 北 0 0 2
摘 要 :采 用 F e sae公 司 的 MC9 DG1 8单 片机 进 行 控 制 , 用 R(HM 公 司 生产 的发 送 接 收一 体化 反 射 型 光 电 传 感 器 re c l S 2 使 ) R R2 0 设 计 了一 种 新 型 迷 宫机 器人 。该 迷 宫机 器人 能 够 在 程 序 中 严格 控 制 光 电传 感 器 的 开 关 , 时 用 软 件 消 除 外 界 P 2, 同
W a uo he ng G s ng, Lu M i ng,C ha a ng Ti nqi ng
()p rme t f n rlE gn e ig 1e a t n o Co to n ie rn ,Ac d m yo mo e reEn ie r g,Be ig 1 0 7 ,C ia a e fAr rdFo c gn ei n in 0 0 2 hn ) j
1 光 电 传 感 器 原 理
红 外 光 电传 感 器 工 作 原 理 如 图 1所 示 。 发 送 器 对 准 目标 发 射 光 束 , 射 的 光 束 一 般 来 源 于 半 导 体 光 源 、 光 发 发 二 极 管 (. I ED) 激光 极 管 及 红 外 发 射 二 极 管 。光 束 不 问 、 断 地 发射 , 者 改 变脉 冲宽 度 。接 收器 由光 电二 极 管 、 电 或 光
干 扰 , 得 了很 好 的 探 测 效 果 。 取
关 键 词 :迷 宫 机 器 人 ;光 电 传 感 器 ;RP 2 ;M C9 DG1 8 干 扰 R2 0 S 2; 中 图分 类 号 : 3 9 TP 9 文 献 标 识 码 :A
迷宫机器人课程设计
迷宫机器人课程设计沈阳工程学院课程设计设计题目:迷宫机器人设计系别自控系班级学生姓名学号指导教师职称助教起止日期:2010年7 月19 日起——至2010 年7 月23 日止沈阳工程学院课程设计任务书课程设计题目:迷宫机器人设计系别自动控制工程系班级学生姓名学号指导教师职称助教课程设计进行地点:F430任务下达时间:2010 年7 月19日起止日期:2010 年7 月19日起——至2010 年7 月23日止教研室主任年月日批准迷宫机器人设计1 设计主要内容及要求1.1 设计目的:1了解机器人技术的基本知识以及有关电工电子学、单片机、机械设计、传感器等相关技术。
2初步掌握机器人的运动学原理、基于智能机器人的控制理论,并应用于实践。
3通过学习,具体掌握智能机器人的控制技术,并使机器人能独立执行一定的任务。
1.2 基本要求1要求设计一个能走迷宫(迷宫为立体迷宫)的机器人;2要求设计机器人的行走机构,控制系统、传感器类型的选择及排列布局。
3要有走迷宫的策略(软件流程图)。
1.3 发挥部分可以增加其它的功能。
2 设计过程及论文的基本要求:2.1 设计过程的基本要求1基本部分必须完成,发挥部分可任选;2符合设计要求的报告一份,其中包括总体设计框图、电路原理图各一份;3设计过程的资料、草稿要求保留并随设计报告一起上交;报告的电子档需全班统一存盘上交。
2.2 课程设计论文的基本要求1参照毕业设计论文规范打印,包括附录中的图纸。
项目齐全、不许涂改,不少于3000字。
图纸为A4,所有插图不允许复印。
2装订顺序:封面、任务书、成绩评审意见表、中文摘要、关键词、目录、正文(设计题目、设计任务、设计思路、设计框图、各部分电路及相应的详细的功能分析和重要的参数计算、工作过程分析、元器件清单、主要器件介绍)、小结、参考文献、附录(总体设计框图与电路原理图)。
3 时间进度安排2010-7-19沈阳工程学院迷宫机器人课程设计成绩评定表系(部):自控系班级:学生姓名:中文摘要机器人技术一直是人们最关注的科学研究领域之一。
机器人课程设计报告

智能机器人课程设计总结报告姓名:组员:指导老师:时间:一、课程设计设计目的了解机器人技术的基本知识以及有关电工电子学、单片机、机械设计、传感器等相关技术。
初步掌握机器人的运动学原理、基于智能机器人的控制理论,并应用于实践。
通过学习,具体掌握智能机器人的控制技术,并使机器人能独立执行一定的任务。
基本要求:要求设计一个能走迷宫(迷宫为立体迷宫)的机器人。
要求设计机器人的行走机构,控制系统、传感器类型的选择及排列布局。
要有走迷宫的策略(软件流程图)。
对于走迷宫小车控制系统设计主要有几个方面:控制电路设计,传感器选择以及安放位置设计,程序设计二、总体方案2.1 机器人的寻路算法选择将迷宫看成一个m*n的网络,机器人通过传感器反馈的信息感知迷宫的形状,并将各个节点的与周围节点的联通性信息存储于存储器中,再根据已经构建好的地图搜索离开迷宫的路径。
这里可选择回溯算法。
对每个网格从左到右,每个网格具有4个方向,分别定义。
并规定机器人行进过程中不停探测前方是否有障碍物,同时探测时按左侧规则,进入新网格后优先探测当前方向的左侧方向。
探测过程中记录每个网格的四个方向上的状态:通路、不通或未知,探测得到不同状态后记记录,同时记录当前网格的四个方向是否已被探测过。
若某网格四个方向全部探测过则利用标志位表示该网格已访问。
为了寻找到从起点到终点的最佳路径,记录当前网格在四个方向上的邻接网格序号,由此最后可在机器人已探测过的网格中利用Dijkstra算法找到最佳路径。
并为计算方便,记录网格所在迷宫中行号、列号。
并机器人探索过程中设置一个回溯网格栈记录机器人经过的迷宫网格序号及方向,此方向是从一个迷宫网格到下一个迷宫网格经过的方向。
设置一个方向队列记录机器人在某网格内探测方向的顺序。
设置一个回溯路径数组记录需要回溯时从回溯起点到回溯终点的迷宫网格序号及方向。
考虑到迷宫比较简单,且主要为纵横方向的直线,可采用让小车在路口始终左转或者始终右转的方法走迷宫,也就是让小车沿迷宫的边沿走。
自动走迷宫的机器人设计与总结报告
目录摘要 ............................................................................................................................................. - 2 - 一:方案的设计和论证.............................................................................................................. - 2 - 方案1:利用红外线和压力传感器采集信息........................................................... - 2 -方案2:超声波和红外线传感器为主要信息采集传感器....................................... - 2 -方案3:只采用红外线传感器检测数据................................................................... - 3 -方案论证.................................................................................................... - 3 - 二:电路设计及机械设计.......................................................................................................... - 3 - 1:红外线信息采集电路............................................................................................ - 4 -2:多路选择开关........................................................................................................ - 5 -3:信号放大电路........................................................................................................ - 6 -4:TLC1549模数转换+5V参考电压电路 ............................................................... - 6 -5:模数转换电路介绍................................................................................................ - 9 -6:单片机处理器...................................................................................................... - 11 -7:L297电路图 ........................................................................................................ - 14 -8:步进电机与L298电路图 ................................................................................... - 16 -9:L297和L298的连接驱动电路.......................................................................... - 17 -10:稳压+5V电源产生电路.................................................................................... - 18 -11:继电器的工作原理............................................................................................ - 18 -12:扩展功能介绍.................................................................................................... - 18 -13:演示迷宫图........................................................................................................ - 19 -14:机器人构造介绍................................................................................................ - 19 - 三:程序流程图............................................................................................... 错误!未定义书签。
Maze_Robot教程
主编:胡文杰、王元伟指导老师:黄贤英、杨宏雨重庆理工大学嵌入式实验室2014 年 5 月目录OUTLINE (2)一、电脑鼠案例整体架构 (3)1.1 硬件部分结构图 (3)1.2 硬件部分电路图 (4)二、硬件模型的搭建 (4)2.1 准备工作 (4)2.2 焊接元器件 (6)2.3 电机的制作 (8)2.4 电机的固定及轮子的制作 (10)2.5 模型的完成 (11)三、电机的驱动原理及控制应用 (12)3.1 电机的驱动原理 (12)3.1.1 驱动电路芯片L9110 (12)3.2 电机的控制及应用 (13)四、传感器的原理及应用 (13)4.1 74HC138译码器 (14)4.1.1 译码器的工作原理 (14)4.1.2 译码器在传感器电路中的应用 (15)4.2 载波发生器 (16)4.4 传感器组 (16)4.4.1 传感器组的原理及应用 (16)4.4.2 传感器组的硬件调试说明 (17)五、编译环境及下载工具的安装及使用 (18)5.1编译软件的安装及使用 (18)5.1.1 编译软件的安装 (18)5.1.2 编译软件的使用 (18)5.2 下载软件的使用 (18)六、上位机算法设计 (19)6.1 迷宫形状的设计 (19)6.2 算法流程 (20)6.2.1 主程序流程图 (20)6.2.2 达到终点子程序流程图 (21)6.2.3 返回起点子程序流程图 (22)6.2.4 冲刺子程序流程图 (23)OUTLINEThis tutorial on the principles of IEEE Computer Mouse Maze exploration and production based on 51 single-chip design, infrared sensors, servo motors Maze robot (maze computer mouse). Were analyzed for the 8×8 maze, maze computer mouse on the entire process from hardware design and program design principles are briefly described. Maze robot combines intelligent computers, electronics, machinery, and other multi-disciplinary technical walking robots. The overall structure of the robot maze usually include embedded microcontrollers, sensors, electromechanical moving parts, its function is in a random layout of the maze maze from the starting point to search and find the best path to a path to end. In order to allow the maze to find the best path to the end of the robot in the maze, the robot must have a random walk through the maze, memory maze, maze searching, routing capabilities, the whole robot by mechanical parts, hardware circuit, part of the program algorithm components. Do the maze robot has three main steps: application of structures, sensors and electromechanical hardware model debugging, development and downloading tools.概述本教程就IEEE走迷宫电脑鼠原理进行探索,并设计制作基于51单片机、红外传感器、伺服电机的Maze robot(迷宫电脑鼠)。
机器人结构及控制电路

机器人结构及控制电路(一)结构和组成1、机械部分:①足式②履带式③轮式2、传感器:①红外测距传感器②色差传感器(一般用于机器人寻迹)③温度探测器(用于检测主板温度和电机温度,便于提高系统性能的稳定性)3、控制器:大部分机器人均用自动控制装置,一般采用8位单片机,辅助以外部电路。
4、驱动源:①电源部分:一般用容量较大的锂电池,但也用铅蓄电池和干电池。
②电机部分:一般选用连续轨迹的伺服电机,但也有步进电机。
(二)控制电路(主要是以类似于触角式机器人为例)1、控制器的类型①串型处理结构:一般有单CPU结构、集中控制方式和两级CPU结构、主从式控制方式及多CPU结构、分布式控制方式。
(注:触角式属于单CPU控制结构)②并行处理结构:开发机器人控制专用超大规模集成电路(VLSI)和利用有并行处理能力的芯片式计算机(如Transputer、DSP)构成并行处理网络及利用通用的微处理器。
2、三种机器人控制器的比较【注:单片机亦称微型电脑或单片微型计算机,国际上称为微控制器,就是将中央处理单元(CPU)、程序存储器(ROM)、数据存储器(RAM)及输入输出(I\O)端口等部件集成在一片大规模或超大规模集成电路上的超微型计算机】①51系列单片机:应用最广泛的8位单片机首推Intel 的51系列,它从内部的硬件到软件有一套完整的按位操作系统,称作位处理器或布尔代数。
典型产品是8051,片内有4KB 的一次性可编程(OTP)存储器,还有AT89C51、AT89C52等产品成为当今最流行的8位单片机。
51系列单片机I\O设置和使用非常简单。
②PIC系列单片机:PIC系列单片机是美国微芯公司的产品,是当前市场份额争长最快的单片机之一。
PIC系列的单片机共分三个级别:基本级、中级、高级。
其中又以中级的PIC16F873(A)【28脚】、PIC16F877(A)【40脚】用得最多,具有低工作电压、低功耗、驱动能力强等特点,以后用这两种单片机为例进行说明。
基于MC9S12DGl28单片机的迷宫机器人设计

.
dr c — u r n tr e e u e o d v h a ,a d t e moo p e s d t ce y p oo l cr e s r i tc re tmoo sw r s d t r e t e c r n h t r s e d wa ee t d b h t ee t c s n o e i i a d e c d n ik n n o i g d s .T e R R2 0 s n o h c e d n n e t i fa e a su e o d tc e i o ma h P 2 e s rw i h s n s a d i c p s n r r d r ywa s d t e e t n r — h t f t n o e ma eSwa1 i a l h x e me t n lsss o a e d sg e c o mo s a aif h i ft z ’ o h l.F n l y,t e e p r n ay i h wst t h e in d mir — u e c n s t y t e i a h t s
Ab t a t s r c :Ac o d n o t e r ls o E tn a d mir - u e mac c r i g t h u e fI EE sa d r c o mo s t h,a n w y e mi r — u e wa e e t p c o mo s s d —
mir - u eS h r wa e a q ie n s c mp e ey I lo r d e h o e sz c o mo s ’ a d r c u r me t o l tl . ta s e uc st e wh l ie,we g ta o to h — ih nd c s ft e mi
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:迷宫机器人主要研究的几个部分:行走机构、传感器、驱动方式、控制系统。
控制系统设计是迷宫机器人设计中很关键的一部分,只有具有合理的结构和稳定可靠的控制系统,才能保证迷宫机器人顺利迅速地完成行走迷宫的过程,才能保证为研究复杂的迷宫算法打下良好的基础。
关键词:迷宫机器人,硬件结构,控制系统设计
1.引言
迷宫机器人的体系结构分为两种:水平式体系结构,垂直式体系结构。
水平式结构最早由nillsion提出来的,它采用从上而下的方法构造系统,根据信息的流向及行为功能,将机器人的控制过程分解成不同的子任务,由不同的功能模块去执行,这些功能模块组成了一条闭环链,信息流由环境经由传感器进入机器人处理器,经过规划决策处理后再经由执行机构返回环境,从而实施控制行为,构成一个闭环系统。
垂直式结构是采用从下而上的方法构造系统,将完成机器人某一特定控制的感知、规划、任务执行等过程封装在一起,称为一个行为(如停止、避障、漫游、跟踪探测等等),每一个行为都实现传感器信息与机器人动作间的一种映射,某一时刻,只有一种行为能够控制车体,机器人最终的动作是由各层行为间的相互竞争实现的.
2.迷宫机器人行走机构设计
行走机构是行走机器人的重要执行部件,它由驱动装置、传动装置、传动机构、位置检测元件、传感器、电缆及管路等组成。
执行机构只要是机器人的足、腿、手、臂、腰及关节等,它是机器人运动和完成某项任务所必不可少的组成部分。
驱动装置和传动装置用来有效地驱动执行机构的装置,通常采用液压、电动和气动,有直接驱动和间接驱动二种方式。
要研究迷宫机器人的路径规划,实现机器人在迷宫中的准确行走,都必须建立移动机器人的运动学模型,在轮式移动机器人中,差动转向式机器人控制复杂,但精度比较高,因此迷宫机器人采用双轮单独驱动、前轮为万向轮的结构,通过两个后轮的转速差来实现机器人的前进、后退、转弯等动作,使得机器人能够在迷宫中灵活地行走和避障。
机器人的机械结构主要是指机器人的机械构造、设备选型等,迷宫机器人的机械部分主要有车架、车轮、直流减速电机及其连接等。
移动机器人的运动系统主要有轮式、足步式、履带式和蛇形等几种,其中应用最为广泛的是轮式运动结构,在相对平坦的地面上,用车轮移动方式行走是相当优越的。
3.迷宫机器人传感器系统设计
传感器系统是迷宫机器人很重要的一部分,它的作用是建立合理的机器人感觉系统,以便机器人能建立起完整的信息获取渠道,也是关系到迷宫机器人智能程度的关键,由于环境的多样性、自身状态的不确定性和单一传感器的局限性,仅仅依靠一种传感器难以完成对周围环境的感知,为完成在复杂环境下的自主移动,机器人通常装有用于导航需要的多种传感器,机器人选择什么样的传感器完全取决于机器人的工作需要和应用特点,并要求传感器具有较强的抗干扰性、较好的稳定性、快速性以及较低的成本等。
环境感知能力是移动机器人除了移动之外最为基本的一种能力,感知能力的高低直接决定了一个机器人的智能性高低,它的作用是建立合理的机器人感觉系统,以便机器人能够建立起完整的信息获取渠道。
机器人要具备智能行为就必需依靠传感器不断感知外界环境,从而做出相应的决策行为。
目前传感器的种类繁多,功能越来越丰富,像超声波传感器、红外传感器、光电传感器等。
传感器系统是机器人很重要的部分,选择机器人传感器完全取决于机器人的工作需要和应用特点,因此迷宫机器人的传感器系统包括三个红外传感器和三个黑标传感器。
4迷宫机器人驱动系统设计
驱动方式分为电动式,液压式,气动式,本文采用直流伺服电动机。
简单介绍其它两种。
气动式分为直线气缸,摆动汽缸及旋转气动马达。
适合于节拍快、负载小且精度要求不高的场合(因为空气具有可压缩性)。
气动马达是将压缩空气的压力能转换成回转机械能的转换装置。
液压式从运动形式来分分为直线驱动如直线运动液压缸和旋转驱动如液压马达、摆动液压缸。
从控制水平的高低来分分为开环控制液压系统和闭环控制液压系统。
液压系统具有较大的功率体积比,适合于大负载的情形。
液压驱动的本质优点在于它的安全性。
如喷漆时要求工作区域所带电压不超过9v。
通电导体在磁场中一定会受到力的作用。
判断受力方向用左手法则:磁力线穿过手心,四指指向电流方向,大拇指则指向受力方向。
电枢绕组在旋转一周的过程中,每根导体中的电流方向发生了改变,但由于换向器的作用,保证了每个磁极下的导体的通电方向不变,从而使得电枢的受力方向不变。
5 迷宫机器人控制系统设计
控制系统是机器人的信息处理中心
集成了丰富的外部设备接口。
具有两路uart和最多可达5个定时器及6个pca模块,此外还根据不同的需要集成了spi、usb、can、lin等接口,以及rtc部件。
外设接口在不使用时可以分别禁止以降低系统功耗。
与其他类型的单片机实现相同的功能需要多个芯片的组合才能完成相比,c8051单片机不仅减少了系统成本,更大大降低了功耗。
增强了在信号处理方面的性能,部分型号具有16x16 mac以及dma功能,可对所采集信号进行实时有效的算法处理并提高了数据传送能力。
基于上述特点,silicon labs 公司c8051f系列单片机作为soc芯片的杰出代表能够满足绝大部分场合的复杂功能要求,并在嵌入式领域的各个场合都得到了广泛的应用:在工业控制领域,其丰富的模拟资源可用于工业现场多种物理量的监测、分析及控制和显示;正是这些优势,使得c8051单片机在进入中国市场的短短几年内就迅速风靡,相信随着新型号的不断推出以及推广力度的不断加大,c8051系列单片机将迎来日益广阔的发展空间,成为嵌入式领域的时代宠儿。
此系列单片机完全兼容mcs-51指令集,容易上手,开发周期短,大大节约了开发成本。
c8051f系统集成度高,总线时钟可达25m 。