20.1转向角传感器SAS
MaxiSys手册说明书

商标深圳市道通科技股份有限公司(下称“道通公司”)已经在中国及海外若干国家进行了商标注册。
Autel®,MaxiSys TM,MaxiDAS®,MaxiScan®,MaxiTPMS®,MaxiVideo TM ,MaxiRecorder TM,和 MaxiCheck TM 均是道通公司的注册商标。
本手册中所提及的其他商标,都属于相应公司所有。
版权信息未征得道通公司的书面同意,任何公司或个人不得以任何形式(电子、机械、影印、录制或其它形式)对本说明书进行复制和备份。
免责声明和责任限制说明书中的所有信息、规格及示图均为出版截止时的最新信息。
道通公司保留对其进行更改而不另行通知的权利。
说明书中的内容已经过认真审核,但不保证其内容(包括但不限于产品规格、功能及示图)的完整性和准确性。
本公司不承担任何直接、间接、特殊、附带的损坏赔偿或任何间接经济损害(包括但不限于利润损失)。
注意:设备进行操作与维护前,请认真阅读本说明书,尤其是安全注意事项。
服务与支持销售服务热线:400-009-3838转1售后服务热线:400-009-3838转2*********************其它国家与地区的用户,请联系当地经销商寻求技术支持。
安全信息为了自身与他人的安全,同时避免对设备及车辆造成损坏,所有操作该设备的人员请务必阅读本手册中所提到的安全注意事项。
由于进行车辆维修时会使用各种程序、工具、部件及技术,同时工作人员的操作方式也各有不同,但因诊断应用程序和该设备所检测产品的种类繁多,本手册无法对每种情况进行预测并提供安全建议。
汽车维修技术人员有责任对所测试的系统进行充分的了解,并合理使用适当的维修方法和测试程序。
进行测试时,必须使用适当的操作方法,以避免对自身和工作区域内其他人员的人身安全造成威胁,同时避免对正在使用的设备或正在测试的车辆造成损坏。
使用设备前,请参考并遵守车辆或设备生产商提供的安全信息及适用的测试程序。
BOSCH ESP结构和功能

S
G
B
204_005
2. 现在增大制动力。 侧导向力就变小了。
2 S
3. 合力等于制动力。 这时车轮就抱死了,由于无侧导向力,车辆就 处于无法控制状态。
驱动力与侧导向力之间也存在类似情况。
3
当驱动力都用上的时候,侧导向力就变为零了,
这时驱动轮就开始打滑空转了。
G
B
204_006
S=0
B=G
204_007
在ITT系统上,这个预压力是由一个主动式制动 助力器产生的,该助力器也叫加压器。 液压单元与控制单元构成一个组件。
6பைடு நூலகம்
基本原理
F = 9,81 N
力和力矩
物体上作用着各种力和力矩,当这些力和力矩的 总和为零时,物体就处于静止状态;如果不为零, 那么物体就沿合力方向运动。
204_003
I
II II
车上作用的还有下述力和力矩:
- 偏转力矩 (I),该力矩试图使车沿垂直 轴线转动。 及
- 车轮转矩及惯性矩(II), 该力矩试图使车保持 原来的运动方向
- 其它的力,如空气阻力
204_019
7
基本原理
用Kamm.schen 摩擦圆能更清楚地说明这几个力共同作用的情况。 这个摩擦圆的半径大小由路面与轮胎之间的附着力决定,也就是 说:附着力小,那么这个半径就小(a);附着力大,这个半径就大(b).
204_069
ESP的作用是什么?
ESP是汽车上的主动安全装置之一。 人们也称之为行驶动力学系统。 简单地说,它就是一个防滑程序。 它可识别出车要侧滑了,与此同时,它可采取 补救措施,以防车辆滑出跑道。
优点:
- 它并不是一个单独的系 统,而是建立在牵引系 统上的,因此它也有该 系统的工作特点。
最新BrakeESC制动系统汇总

MGH 40I O O
O
O O
MGH 40
PLUS O O
O
O O O
O
MGH 60 O O
O
O O O
O
O
O
O O
适用车型
ABS, ESC 车辆 ABS, ESC 车辆 ABS, ESC 车辆
EN, CM, LM ABS, ESC 车辆 BK (后轮驱动)
CM, LM
CM, LM, MD
YF, LM, MD YF, LM, MD
版权ⓒ2009~2010,所有权利均予保留。未经BHMC汽车公司书面许可,不得以任何形式或方式翻印、存储传播全部或部分内容。
制动与ESC系统
8
VSM (车辆稳定管理)
■ 系统配置 : ESC + MDPS
ESC
VSM 输入传感器
SAS 横摆率传感器
WSS×4
制动器 发动机 ESC 控制模块
VSM +
制动与ESC系统
1
BrakeESC制动系统
版权ⓒ2009~2010,所有权利均予保留。未经BHMC汽车公司书面许可,不得以任何形式或方式翻印、存储传播全部或部分内容。
制动与ESC系统
MD制动器的新特性是什么?
驻车制动器类型
独立式驻车制动器,DIH(帽形鼓式)
2
集成式驻车制动器, BIR(凹槽盘钢球式)
转向不足控制 : 转向力减少 转向方向
高-μ
低-μ
版权ⓒ2009~2010,所有权利均予保留。未经BHMC汽车公司书面许可,不得以任何形式或方式翻印、存储传播全部或部分内容。
制动与ESC系统
VSM 故障代码
故障 代码
volvo缩写

中央电子模组(CEM)
还负责控制:前雾灯 后雾灯
倒车灯 刹车灯 高位刹车灯 转向信号灯/危险警告信号闪烁灯 挡风玻璃/头灯/后车窗雨刷/清洗器 行李室照明 后除雾器 燃油泵 燃油油位 电动辅助加热器(某些市场) 雨水传感器 车顶天窗 喇叭 油门踏板(AP)位置传感器 起动机
制模块(CCM)(4/6)通讯,接着后者会全部或部分关闭以下负载: 电动辅助加热器 后除雾器 电热式座椅 电热式车 门后视镜。 中央电子模块(CEM)也经由控制区域网络(CAN)将要求传递至发动机控制模块(ECM)以增加发动机怠速速度。 当发动机不运作时,所有电流必须从蓄电池取得。有一些不同的负载可以在发动机不运作时启动,例如信息娱乐系统。中央电 子模块(CEM)持续监测蓄电池的电压水平。当电压水平太低,中央电子模块(CEM)会传递信息至信息娱乐控制模块(ICM) (3/281)等等,于是它接着关闭信息娱乐系统。发生这情况时,信息也会经由CAN网络传递到驾驶员信息模块(DIM)(5/1), 于是它接着向用户显示一文字讯息。 当发动机不运作时,如果在点火位置II使用信息娱乐系统,信息会传送至驾驶员信息模块(DIM)。如果信息娱乐系统将 在2分钟后关闭,会显示一讯息。 充电电压 为了让蓄电池充电达到最佳状态,中央电子模块(CEM)由蓄电池温度计算来自发电机的输出电压。交流发电机 控制模块(ACM)(充电调节器)将依照来自中央电子模块(CEM)的控制加以调节输出电压。在发动机控制模块(ECM)也 可影响发电机控制时,输出电压可能偏离例如在不同的驾驶状态时。
多媒体模组 (MMM)
多媒体模块(MMM)是选配控制模块。它最重要的任务是处理以下功能: 导向 GPS 屏幕的RGB输出 DVD播放机。
北京现代全新胜达培训

锁止 在粗糙路面 使扭矩最大 化(仅在车速 低于40km/h 时开启)。
版权ⓒ2009,所有权利均予保留。未经BHMC汽车公司书面许可,不得以任何形式或方式翻印、存储或传播全部或部分内容。
4轮驱动
维修数据
当前数据流
14
选择性显示
全部列表
图表
项目列表
重置最小
记录
停止
分组
传感器名称 发动机转速 车速 节气门位置 点火开关电压 蓄电池电压 行驶扭矩 离合器占空比 热值(ITCC) 轮速传感器-前右 轮速传感器-前左 轮速传感器-后右 轮速传感器-后左 方向盘转角速度传感器(仅ESP) 警告灯 压力传感器
信号 – 搭铁 (2-3) 1.9~2.8
版权ⓒ2009,所有权利均予保留。未经BHMC汽车公司书面许可,不得以任何形式或方式翻印、存储或传播全部或部分内容。
4轮驱动
4WD控制模式
[4WD锁止开关] 模式 自动 4WD锁止 扭矩分布 0:100 ~ 50:50 50:50 (固定) 备注 40kph以下
4
外观
版权ⓒ2009,所有权利均予保留。未经BHMC汽车公司书面许可,不得以任何形式或方式翻印、存储或传播全部或部分内容。
4轮驱动
4WD偶合器
5
离合器
压力传感器 DC电机 执行器总成 液压泵
版权ⓒ2009,所有权利均予保留。未经BHMC汽车公司书面许可,不得以任何形式或方式翻印、存储或传播全部或部分内容。
18
警告灯 ○ ○
P1831
系统 过热 (4个)
离合器过热警告 离合器过热停止
执行器过热警告 执行器过热停止 压力传感器偏差过大
X ○
X ○ X
4WD偶合器 故障(17个)
迈锐宝等汽车用方向盘转角传感器工作原理研究

迈锐宝等汽车用方向盘转角传感器工作原理研究陈富安;李江江【摘要】汽车方向盘转角传感器能够监测方向盘的转角大小及转动方向,是汽车安全性驾驶的核心保障器件,可为电子车身稳定系统或者电动助力系统提供精确的转角位置信息.对其工作原理进行研究并与常见转角传感器工作原理进行对比,结果验证了其工作原理的优越性和可靠度,为汽车电子差速技术的发展奠定一定的基础.【期刊名称】《汽车实用技术》【年(卷),期】2015(000)004【总页数】3页(P4-6)【关键词】转角传感器;MLX90316;槽型光电;混合测圈【作者】陈富安;李江江【作者单位】河南工业大学电气工程学院,河南郑州450001;河南工业大学电气工程学院,河南郑州450001【正文语种】中文【中图分类】TP212.6CLC NO.: TP212.6 Document Code: A Article ID: 1671-7988(2015)04-04-03 目前,方向盘转角传感器SAS(steering wheel Angle sensor)主要有滑动电阻式、磁感应式、霍尔式和光电式等几种[1]。
而比较主流的转角传感器(如德国BOSCH生产的转角传感器LWS5)几乎都是利用转向柱大齿轮带动2个嵌入小磁铁的从动小齿轮转动,ECU检测到这2个从动小齿轮的转动角度,再通过软件程序计算出转向柱大齿轮的绝对转角[2]。
此种SAS虽然技术成熟、准确度高、寿命长,但其价格昂贵,不是电动汽车行业的理想选择,再加上此种SAS内部使用2个从动小齿轮,并且从动小齿轮上方都加有MLX90316转角传感器,从而导致结构紧凑,不利于安装,也增加了成本。
然而近期市面上以雪佛兰迈锐宝、别克新君威、别克新君越等为代表的欧美中型车,由于性能优越,价格适宜,同时具备豪华感,所以成为了大家所热捧的车型。
与此同时出现的这三款车型都能够使用的方向盘转角传感器,其型号为C68049XF25849366ANA761008A,由于价格低廉、通用性强、精度高、寿命长等优点为众多电动汽车制造商所青睐,本文针对这三款车型均可使用的SAS进行研究,分析其工作原理并运用matlab进行了仿真验证,说明了其优越性和可靠性。
长城哈弗车型故障2例
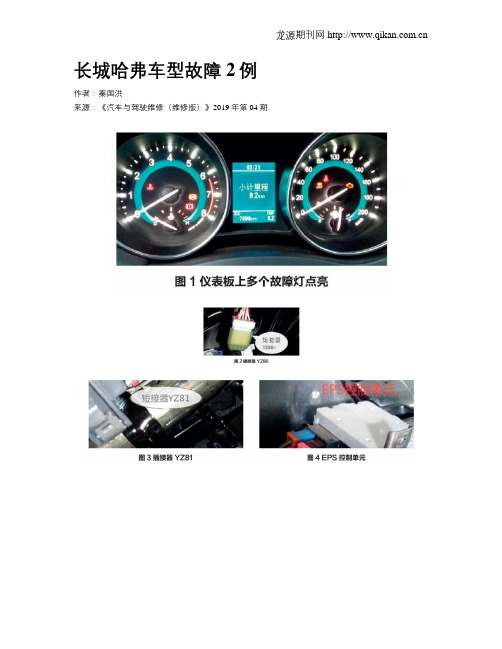
长城哈弗车型故障2例作者:秦国洪来源:《汽车与驾驶维修(维修版)》2019年第04期故障1关键词:插接器、电动转向控制单元、CAN网络故障现象:一辆长城哈佛H1运动型多功能车,搭载1.5 L发动机,5挡手动变速器,行驶里程7 600 km。
用户反映该车在起动后,仪表板上的发动机维修指示灯、发动机故障灯、ABS 报警灯和驱动防滑指示灯常亮(图1),同時转向感觉沉重。
检查分析:维修人员接车后进行试车,发动机可以顺利起动,但明显感觉方向比较沉重,仪表板上多个报警灯点亮,水温表和转速表指针不工作,使用诊断仪无法读取故障码。
从目前已知的故障现象可以初步判断,应该为CAN网络故障,所以重点检查各控制单元、网络中的插接器以及CAN线。
首先,维修人员测量诊断插接器的6号端子CAN-H和14号端子CAN-L的电压,CAN-H 电压为0.13 V,CAN-L电压为0.31 V。
而CAN-H正常的电压为2.60 V左右,CAN-L电压为2.40 V左右。
断电后测量诊断插接器6号和14号端子之间电阻值为58.60 Q,在正常范围内。
通过测量可知,是由于CAN线电压异常导致诊断仪不能进入任何系统。
CAN网络电压异常,有可能是网络中的控制单元本身出现问题,也有可能是CAN线路断路、短路或虚接。
由于排查线路复杂而繁琐,一般的检测思路是先逐个断开网络中的控制单元,如果电压不能恢复正常,再进行线路的排查。
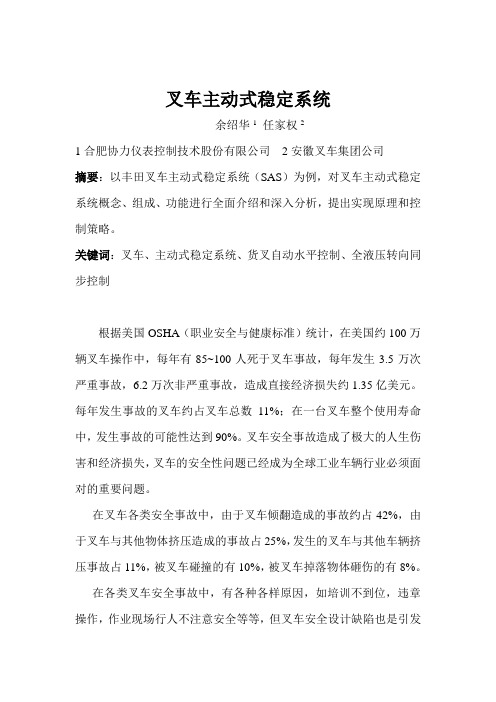
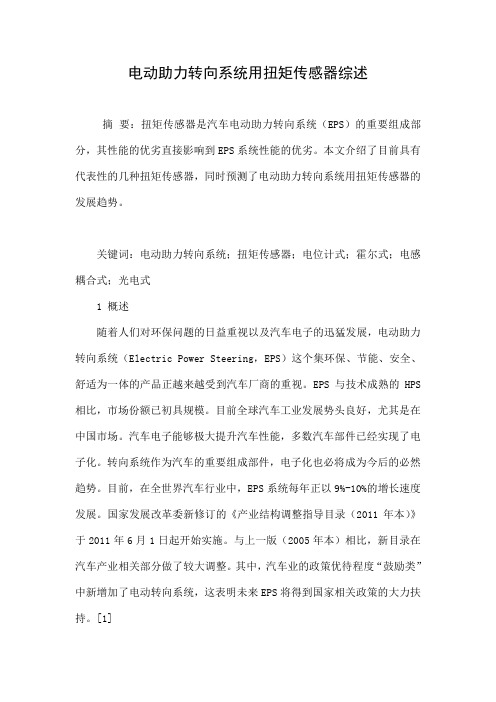
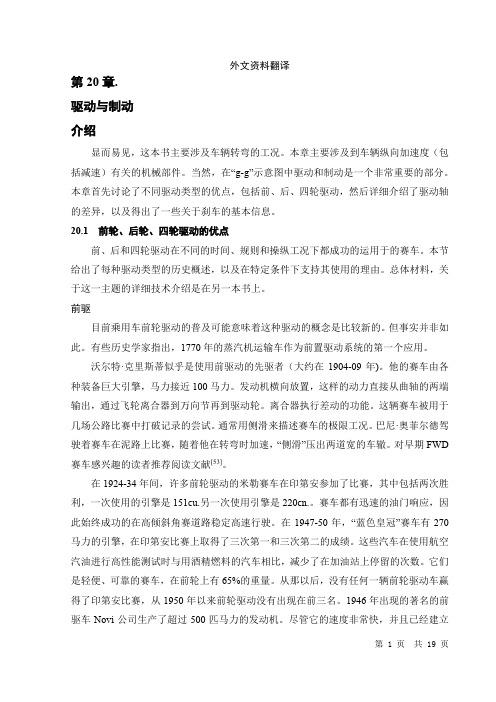
从该车型CAN网络图中可以看出,网络中共有发动机控制单元( ECU)、电子稳定控制单元( ESP)、转角传感器( SAS)、车身控制单元(BCM)、仪表(IP)和电动转向控制单元(EPS)6个控制单元,网络连接中有2个插接器Y280和Y281,以及2个转接插接器Y228和Y240。
根据从易到难原则,首先逐个断开ECU、BCM、ESP、SAS和IP控制单元插接器(由于EPS在仪表台加强梁上,插接器暂时无法拔下,需要拆下仪表台才能拆下控制单元)。
叉车主动式稳定系统
轮胎角度传感器
〇
→
→
S,T
K
指示灯
蜂鸣器
显示器
11
横摆角速度传感器
〇
→
图2主动式稳定系统各部分功能与传感器、执行器等的对应关系
S:后轮稳定主动控制系统;
T:门架主动控制系统;
K:全液压转向同步控制系统。
1.后轮摇摆锁定控制系统
2.
1.功能
平衡重式四支点叉车,后桥中心与车架是铰轴连接,叉车后轮轴的中心和两个前轮是支撑车体的3个支点,构成所谓的叉车重心稳定的三角形。在凹凸路面上,通过后轮轴的上下摇摆来吸引凹凸路面带来的振动,但叉车急速拐弯时,就会出现车辆倾斜,车辆的倾斜导致重心偏移,严重的会导致车辆的侧翻,特别是在货叉高载重并处于高位时急转弯,发生侧翻可能性很大。在叉车各类安全事故中,叉车倾翻造成事故约占42%。提高叉车转弯稳定性是减少这类事故的关键措施,后轮摇摆锁定控制系统(Active control rear stabilizer)可以避免这类安全事故的发生,通过减小车辆急速拐弯时的倾斜度,使叉车转弯时,更稳定,更快速。
图1叉车主动式稳定系统组成
控制功能
传感器
S
T
K
输入
控制器
输出
控制
执行器
1
提升高度开关
〇
〇
→
S
摇摆锁定油缸
2
倾斜角度传感器
〇
→
→
3
前倾开关
〇
→
4
后倾开关
〇
→
T
倾斜控制阀
提升锁定阀
5
下降开关
〇
→
→
6
载荷传感器
〇
〇
→
电动助力转向系统用扭矩传感器综述
电动助力转向系统用扭矩传感器综述摘要:扭矩传感器是汽车电动助力转向系统(EPS)的重要组成部分,其性能的优劣直接影响到EPS系统性能的优劣。
本文介绍了目前具有代表性的几种扭矩传感器,同时预测了电动助力转向系统用扭矩传感器的发展趋势。
关键词:电动助力转向系统;扭矩传感器;电位计式;霍尔式;电感耦合式;光电式1 概述随着人们对环保问题的日益重视以及汽车电子的迅猛发展,电动助力转向系统(Electric Power Steering,EPS)这个集环保、节能、安全、舒适为一体的产品正越来越受到汽车厂商的重视。
EPS与技术成熟的HPS 相比,市场份额已初具规模。
目前全球汽车工业发展势头良好,尤其是在中国市场。
汽车电子能够极大提升汽车性能,多数汽车部件已经实现了电子化。
转向系统作为汽车的重要组成部件,电子化也必将成为今后的必然趋势。
目前,在全世界汽车行业中,EPS系统每年正以9%-10%的增长速度发展。
国家发展改革委新修订的《产业结构调整指导目录(2011年本)》于2011年6月1日起开始实施。
与上一版(2005年本)相比,新目录在汽车产业相关部分做了较大调整。
其中,汽车业的政策优待程度“鼓励类”中新增加了电动转向系统,这表明未来EPS将得到国家相关政策的大力扶持。
[1]电动助力转向系统中,通过扭矩传感器探测司机在转向操作时方向盘产生的扭矩或转角的大小和方向,并将所需信息转化成数字信号输入控制单元,再由控制单元对这些信号进行运算后得到一个与行驶工况相适应的力矩,最后发出指令驱动电动机工作,电动机的输出转矩通过传动装置的作用而助力。
因此扭矩传感器是EPS系统中最重要的器件之一。
2 电动助力转向系统用扭矩传感器分类按传感器的敏感元件来分类,扭矩传感器主要有接触式和非接触式两大类。
其中接触式扭矩传感器应用较广泛的主要有两种,一种是新跃仪表厂生产的悬臂梁式传感器,一种是美国BI公司生产的双圆盘式传感器。
非接触式传感器主要有基于MMT公司技术的霍尔式传感器,代表性的公司有BOSCH公司、LG公司、BI公司、Valeo公司,另外还有Hella公司设计的电感耦合式传感器,Methode electronics公司设计的电容式传感器,Lucas公司设计的光电式传感器。
raceing car ,vehicle design,第20章翻译,传动和制动
第20章.驱动与制动介绍显而易见,这本书主要涉及车辆转弯的工况。
本章主要涉及到车辆纵向加速度(包括减速)有关的机械部件。
当然,在“g-g”示意图中驱动和制动是一个非常重要的部分。
本章首先讨论了不同驱动类型的优点,包括前、后、四轮驱动,然后详细介绍了驱动轴的差异,以及得出了一些关于刹车的基本信息。
20.1 前轮、后轮、四轮驱动的优点前、后和四轮驱动在不同的时间、规则和操纵工况下都成功的运用于的赛车。
本节给出了每种驱动类型的历史概述,以及在特定条件下支持其使用的理由。
总体材料,关于这一主题的详细技术介绍是在另一本书上。
前驱目前乘用车前轮驱动的普及可能意味着这种驱动的概念是比较新的。
但事实并非如此。
有些历史学家指出,1770年的蒸汽机运输车作为前置驱动系统的第一个应用。
沃尔特·克里斯蒂似乎是使用前驱动的先驱者(大约在1904-09年)。
他的赛车由各种装备巨大引擎,马力接近100马力。
发动机横向放置,这样的动力直接从曲轴的两端输出,通过飞轮离合器到万向节再到驱动轮。
离合器执行差动的功能。
这辆赛车被用于几场公路比赛中打破记录的尝试。
通常用侧滑来描述赛车的极限工况。
巴尼·奥菲尔德驾驶着赛车在泥路上比赛,随着他在转弯时加速,“侧滑”压出两道宽的车辙。
对早期FWD 赛车感兴趣的读者推荐阅读文献[53]。
在1924-34年间,许多前轮驱动的米勒赛车在印第安参加了比赛,其中包括两次胜利,一次使用的引擎是151cu.另一次使用引擎是220cn.。
赛车都有迅速的油门响应,因此始终成功的在高倾斜角赛道路稳定高速行驶。
在1947-50年,“蓝色皇冠”赛车有270马力的引擎,在印第安比赛上取得了三次第一和三次第二的成绩。
这些汽车在使用航空汽油进行高性能测试时与用酒精燃料的汽车相比,减少了在加油站上停留的次数。
它们是轻便、可靠的赛车,在前轮上有65%的重量。
从那以后,没有任何一辆前轮驱动车赢得了印第安比赛,从1950年以来前轮驱动没有出现在前三名。
长城哈弗H6仪表系统

水温表的量程为50-120℃,红区起始线对应温度 108℃,水温报警点108℃,解报点103℃。
14-45
¾发动机转速表指示
15-45
¾车速表指示 车速信号取自ABS/ESP的CAN通讯信号,以此累计里程。
16-45
2、液晶显示功能 仪表的液晶显示区,可以显示车辆的累计里程,车 门状态,轮胎气压,平均油耗,自动档档位显示,仪表代 码等。
28-45
如图所示,钥匙未拔报警、灯光未关报警,依据是BCM 接收钥匙检测开关、灯光开关、左前门门灯开关信号然后 通过LIN线传递给仪表。
29-45
三、组合仪表系统的诊断及检测
1、仪表动作测试 2、仪表故障码的读取 3、仪表配置的读写 4、仪表针脚及定义
30-45
1、仪表动作测试 使用检测仪可以对仪表的量表进行动作测试,如发动 机转速表、车速表、水温表、燃油表。
20-45
¾仪表代码显示 仪表代码是仪表厂家内部零部件编码,每种仪表对应一 个五位数字的仪表代码,该代码和总里程显示(ODO)共用 一个位置,通过仪表复位杆进行切换显示。 目前哈弗H6仪表代码有两种: 27001-柴油车装配仪表 27003-汽油车装配仪表 显示方法:点火开关在OFF档,按下复位杆之后打到ON档, 5s后显示仪表代码(27001或27003)。
42-45
4、仪表针脚及定义
43-45
课程回顾
一、组合仪表系统概述 二、组合仪表功能 三、组合仪表系统诊断及检测
44-45
45-45
5-45
6-45
2、组合仪表通讯网络(在CAN网络中的位置)
IP 组合仪表 BCM 车身控制模块
LIN总线 CAN总线
ECM 发动机控制单元
第三代马六《阿特兹功能装备技术要点》

一汽马自达汽车销售有限公司 服务部
1、BSM — 盲点监控系统 2、ESS — 紧急信号系统 3、AFS — 自适应前照灯 4、DRL — 日间行车灯 5、转向灯 6、噪音补偿技术 7、EPS 系统 8、外后视镜 9、安全气囊系统 10、车门锁系统 11、HLA — 坡道起步辅助功能 12、防车轮滚动功能 13、燃油系统 14、燃油压力传感器 15、喷油器的控制与检查
目录
16、真空泵 17、制动液压力传感器 18、助力器压力传感器 19、机油压力控制 20、AT系统的紧急模式、空挡怠速模式 21、AT直接模式 22、座椅加热装置 23、冷却风扇控制 24、空调出风控制 25、点火系统 26、CMP — 凸轮轴位置传感器 27、电流传感器 28、主警告灯 29、模块配置 30、用户个性化设置
《J71功能装备技术要点》
• 行车灯位置 前侧车灯内(分卤素型、氙灯型)
国产2.0L
小灯
其余车型
小灯
• 结构与控制特点
培训日期
Ø 只有前侧有行车灯
参加人数
Ø 小灯和行车灯的控制是独立的
Ø 氙灯型的行车灯 (眼眉+眼圈)与灯罩一体
Ø 卤素灯型分2种:
①无日间行车灯(中国市场,国产);
②有日间行车灯的,位于远光灯内。
前碰撞时前气囊和安全带展开,侧气帘不展开。
• 维修服务
更换SAS模块流程: 1、可编程模块安装
Ø SAS模块 2、DSC传感器初始化
Ø 横摆率传感器 Ø 纵向加速度传感器
培训日期 参加人数
制动液压力传感器
学习·思考
Q:更换SAS模块,需要哪些操作? Q:驾驶员侧安全气囊如何拆装? A:《维修手册》08-10-6
自动驾驶中的冗余控制设计方案
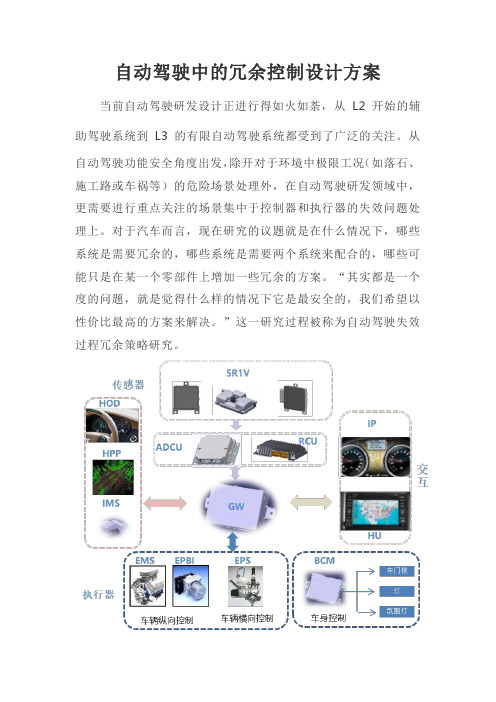
自动驾驶中的冗余控制设计方案当前自动驾驶研发设计正进行得如火如荼,从L2开始的辅助驾驶系统到L3的有限自动驾驶系统都受到了广泛的关注。
从自动驾驶功能安全角度出发,除开对于环境中极限工况(如落石、施工路或车祸等)的危险场景处理外,在自动驾驶研发领域中,更需要进行重点关注的场景集中于控制器和执行器的失效问题处理上。
对于汽车而言,现在研究的议题就是在什么情况下,哪些系统是需要冗余的,哪些系统是需要两个系统来配合的,哪些可能只是在某一个零部件上增加一些冗余的方案。
“其实都是一个度的问题,就是觉得什么样的情况下它是最安全的,我们希望以性价比最高的方案来解决。
”这一研究过程被称为自动驾驶失效过程冗余策略研究。
本文将针对性的就自动驾驶研发过程中的冗余控制进行系统内部控制逻辑及外部制动、转向及电子换挡等响应过程进行说明。
一、功能网络架构如下将就上层控制端针对性的对自动驾驶控制逻辑进行详细说明。
自动驾驶中央控制器又称为运动域控制器,是主要进行自动驾驶功能相关软件处理模块的中央处理单元,包括对前端传感器感知数据的处理、融合,根据探测环境数据进行态势评估,进行轨迹预测,运动规划,决策执行等相关任务,包括L4级泊车控制等相关任务也需要进行相应的处理。
在自动驾驶激活期间同时需要处理相关突发危险状况,保证行车安全。
一般地,为了做到真正的冗余控制,需要分别对控制端、执行端以及网络端分别进行双冗余设计。
其中控制端采用如下方案:-主控制器ADCU(AutomotiveDriving Control Unit)+辅助控制器RCU(Redundancy Control Unit)。
而执行端则采用了制动和转向两套冗余控制方案:-制动:ibooster+EPBi;-转向:主EPS+副EPS;二、执行端冗余控制策略这里我们首先对执行端的冗余控制策略进行讲解。
1、制动冗余控制在制动控制逻辑方案中,主要是加入博世ibooster作为冗余控制器,如下图所示,ibooster主要接收制动踏板压力信号或上层L3系统发出的减速请求信号,将两者形成的机械力转化为相应的电动助力(该助力在一定区间内被放大,放大程度与iBooster标定的不同助力曲线有差别),随即推动液压系统进行减速制动刹车。
别克荣誉--GM-LAN(通用汽车局域网)
7 GM-LAN和BCM7.1 GM-LAN(局域网)的说明7.1.1 一般说明在WL车型装备HFV6发动机的同时,还增设了GM-LAN (通用汽车局域网),与现有的UART串行数据通信系统共同工作。
GM-LAN通信总线利用的是CAN-总线协议。
在串行数据通信形式方面,CAN-总线的操作与UART的方式相似。
主要的不同点是,物理的布线(它使用两条导线,而非一条),以及数据的传输速度(每秒500,000位,相比较下,Class 2为10,400位,UART为8,192位)。
7.1.2 行数据通信在我们介绍GM-LAN系统之前,让我们先看看VZ Commodore装备的其他串行数据通信系统。
通过在通信网络中发送数字信号(信息),VZ Commodore车载模块(计算机)之间就可以进行通信(例如,车体控制模块向发动机控制模块发出一个“已接收到有效信息”(重要的确认)的信息,发动机控制模块则相应地发出一个“可以起动”的信号)。
7.1.3 信息的基本构成每个数字信号被称之为“位”,且代表一个数字。
计算机将一系列这些“位”组合在一起构成一个“词”。
在此,八个“位”构成一个“词”,若干个词构成一条信息。
这些信息与印刷在超市中绝大多数商品上的“条形码”是不相关的。
超市的收银机通过扫描这些条形码来获得有关品牌、商品型号、尺寸/重量及价格等信息。
串行数据是一系列快速变化的电压信号。
这些电压信号是在导线,通常被称之为串行数据线中传输的,一般是由高低变化电压来构成一条信息。
传输及接收(发送)信息的速度与波特率有关,波特率通常是被标明的。
波特速率系数以在每一秒钟所处理的位数量来表示,例如,8192,表示在每一秒钟可处理8192位,即通常的表示单位为位每秒(bps)。
Royaum新技术培训---学员手册7-17-2Royaum 新技术培训---学员手册7.1.4 Types and Application 类型与应用过去的制造的车辆通常不是采用UART ,就是Class 2 (Gen III – PCM)串行数据。
车载设备车辆动态控制系统考核试卷
B.轮速传感器
C.转向角度传感器
D.制动压力传感器
17.车辆动态控制系统在车辆行驶过程中,对以下哪个方面进行实时监控?()
A.车辆速度
B.车辆方向
C.车辆稳定性
D.所有以上选项
18.以下哪个部件在车辆动态控制系统中起到关键作用,用于调整车轮制动力?()
A.制动系统执行器
B.发动机管理系统执行器
9.湿滑路面
10.传感器、执行器
四、判断题
1. ×
2. ×
3. √
4. ×
5. √
6. √
7. ×
8. ×
9. ×
10. √
五、主观题(参考)
1.车辆动态控制系统通过实时监测车辆状态,自动调节发动机输出和制动力分配,提高车辆的稳定性和抓地力,减少打滑和失控的风险,从而提升安全性。
2.当车辆发生侧滑时,动态控制系统会自动检测并减少滑动轮的制动力,同时可能降低发动机功率输出,帮助车辆稳定下来。
C.车辆快速切换车道时
D.车辆在斜坡上停车时
三、填空题(本题共10小题,每小题2分,共20分,请将正确答案填到题目空白处)
1.车辆动态控制系统的主要作用是提高车辆的______性和______性。
()()
2.车辆动态控制系统中的核心部件是______和______。
()()
3.当车辆发生侧滑时,______系统会自动启动,以稳定车辆。
D.降低燃油消耗
16.以下哪些技术是车辆动态控制系统中的主动安全技术?()
A. TCS
B. ESC
C. ABS
D.自动紧急制动系统
17.车辆动态控制系统在以下哪些情况下可能需要调整工作策略?()
基于CANoe的转角传感器零位标定
基于CANoe的转角传感器零位标定唐键;胡艳峰【摘要】阐述CANoe中信号发生器的功能,并应用CANoe中IG模块实现了对转角传感器进行零位标定.【期刊名称】《汽车电器》【年(卷),期】2019(000)007【总页数】3页(P42-44)【关键词】CANoe;信号发生器;IG;转角传感器;标定【作者】唐键;胡艳峰【作者单位】陕西汽车控股集团有限公司,陕西西安710200;陕西汽车控股集团有限公司,陕西西安710200【正文语种】中文【中图分类】U463.6CANoe做为专业的总线开发测试工具,不但具有强大的总线设计仿真功能,在总线测试、数据分析领域也具有强大的数据处理功能。
CANoe的半残余仿真功能可广泛应用于测试、标定等方面。
本文中将应用CANoe中信号发生器的功能作为标定软件,对转角位移传感器进行零位标定,涉及到总线半残余仿真、信号发生器、数据记录与分析等方面的应用。
1 信号发生器功能CANoe的半残余仿真功能,可以模拟实际节点发送数据到总线上。
除此之外,CANoe还有信号发生器的功能,应用信号发生器功能,可以按需求发送想要发送的数据,并且在CANoe工程运行的情况下,信号发生器可以实现暂停、修改数据、然后重新发送。
CANoe中有2个模块有信号发生器的功能,一是IG (Interactive Generator)模块,另一个是Signal Generators and Signal Replay(以下简称SGSR)模块。
1.1 IG模块IG模块可以通过配置实现周期发送报文和按键发送报文。
如图1所示,在CANoe中的SimulationSetup中,在CAN网络主干线上点击右键,选择“Insert Interactive Generator Block”,即可插入IG模块,双击该模块,可以对IG模块进行配置,如图2所示。
IG模块定义的报文可周期发送,也可以定义按键发送,在配置界面中,勾选[Key]选项,并定义一个字母按键,当按下按键后定义的报文才会发送。