方向盘转向角传感器的数据采
电控动力转向系统工作原理

电控动力转向系统工作原理电控动力转向系统是一种新型的汽车转向系统,它利用电机代替了传统的液压助力装置,通过电子控制单元(ECU)来实现对电机的控制,从而实现车辆的转向。
下面将详细介绍电控动力转向系统的工作原理。
1. 传感器信号采集在电控动力转向系统中,有多个传感器用于采集车辆的运动状态和驾驶员的操作信息。
其中包括方向盘角度传感器、转向角速度传感器、车速传感器等。
这些传感器将采集到的信息发送给ECU进行处理。
2. ECU计算ECU是电控动力转向系统中最重要的部件之一,它负责接收并处理来自各个传感器的信号,并根据这些信号计算出合适的输出信号。
同时,ECU还会监测其他关键参数,例如发动机负荷、油门开度等,并根据这些参数进行调整。
3. 电机输出在ECU计算出合适的输出信号后,它会将信号发送给电机执行器。
该执行器会根据接收到的信号来调整电机输出功率和方向,并通过齿轮箱将输出功率传递给转向机构。
4. 转向机构转向机构是电控动力转向系统中的另一个重要部件,它将电机输出的能量转换为车辆的转向力。
在传统液压助力转向系统中,液压助力缸通过油液流动来产生转向力,而在电控动力转向系统中,电机通过齿轮箱驱动齿轮来产生转向力。
这种方式可以实现更加精确和高效的转向。
5. 驾驶员操作最后一个环节是驾驶员的操作。
当驾驶员通过方向盘输入指令时,方向盘角度传感器会采集到这个信号,并将其发送给ECU进行处理。
ECU会根据这个信号计算出合适的输出信号,并将其发送给电机执行器,从而实现车辆的转向。
综上所述,电控动力转向系统是一种利用电机代替液压助力装置的新型汽车转向系统。
它利用传感器采集车辆状态和驾驶员操作信息,并通过ECU计算出合适的输出信号,然后通过电机执行器和齿轮箱将输出功率传递给转向机构,从而实现车辆的精确和高效的转向。
汽车ESP工作原理
汽车ESP工作原理一、引言汽车ESP(Electronic Stability Program)是一种先进的车辆动态稳定控制系统,通过传感器、控制器和执行器等组件,实现对车辆的横向稳定控制,提高行车安全性。
本文将详细介绍汽车ESP的工作原理。
二、传感器汽车ESP系统依赖于多个传感器来获取车辆运动状态的信息。
常见的传感器包括:1. 车速传感器:测量车辆的速度,用于判断车辆是否发生侧滑。
2. 转向角传感器:测量方向盘的转角,用于判断驾驶员意图。
3. 横摆角传感器:测量车辆的横摆角度,用于判断车辆是否偏离预期轨迹。
4. 加速度传感器:测量车辆的加速度,用于判断车辆是否浮现侧滑或者悬挂状态。
三、控制器汽车ESP系统的控制器是系统的核心部件,负责接收传感器的信号,并根据预设的算法进行计算和决策。
主要功能包括:1. 数据处理:接收传感器信号并进行数据处理,如滤波、校准等。
2. 算法计算:根据车辆状态和驾驶员意图,计算出适当的控制指令。
3. 控制策略:根据计算结果,制定控制策略,如制动力分配、扭矩分配等。
4. 控制指令输出:将计算得到的控制指令发送给执行器。
四、执行器汽车ESP系统的执行器是控制器的输出接口,负责执行控制指令。
常见的执行器包括:1. 制动系统:通过对车轮的制动力分配,实现对车辆的横向稳定控制。
2. 发动机控制系统:通过调节发动机扭矩输出,实现对车辆的横向稳定控制。
3. 转向系统:通过对车轮的转向力分配,实现对车辆的横向稳定控制。
五、工作原理汽车ESP系统的工作原理可以简述为以下几个步骤:1. 传感器数据获取:传感器不断采集车辆的运动状态信息,如车速、转向角度、横摆角度等。
2. 数据处理与算法计算:控制器接收传感器数据,并进行数据处理和算法计算,得出车辆的当前状态和驾驶员意图。
3. 控制策略制定:根据当前状态和驾驶员意图,控制器制定相应的控制策略,如制动力分配、扭矩分配等。
4. 控制指令输出:控制器将计算得到的控制指令发送给执行器,执行器根据指令执行相应的动作。
方向盘转向角传感器的数据采集系统设计
方向盘转向角传感器的数据采集系统设计作者:何润东潘盛辉韩峻峰孟德良来源:《现代电子技术》2011年第19期摘要:通过对方向盘转向角传感器的分析,设计了转向角传感器的数据采集系统,并且设计了相应的外围辅助电路,通过ARM读取传感器中的数据,对方向盘转向角,方向盘转向角速度以及转动方向这三个参数进行数据采集。
这些参数为汽车自适应前照灯控制,以及助力转向系统提供了方向盘转向角相关信息,为了便于对采集到的数据进行分析,方向盘转向角传感器采集到的数据通过串口送到上位机上,并且利用Matlab对采集的数据进行分析处理。
关键词:方向盘转向角传感器; 数据采集; ARM; Matlab中图分类号:TN919-34文献标识码:A文章编号:1004-373X(2011)19-0116-03Data Acquisition System of Steering Wheel Angle SensorHE Run- PAN Sheng---(1. Department of Electronic Information and Control Engineering, Guangxi University of Technology, Liuzhou 545006, China;2. Department of Electrical Engineering, Guangxi College of Vocational and Technical, Nanning 530007, China)Abstract: Through the analysis of steering wheel angle sensor, data acquisition system of steering angle sensor and the corresponding external auxiliary circuit were designed. Through reading the data from sensor with ARM, the data acquisition was performed with parameters of steering wheel, steering wheel angular velocity and rotation direction. These parameters provided related information of steering wheel angle for the control of automotive adaptive headlamps and the power steering system. In order to analyze the collected data, the data of steering wheel angle sensor was sent to the host computer through the serial port, and the collected data were processed through Matlab.Keywords: steering wheel angle sensor; data acquisition; ARM; Matlab自适应前照明系统(AFS),是一种能适应各种不同环境条件的智能前照灯系统[1-2],获得汽车在转弯处的参数,如:转向角,角速度以及转向,是汽车前向灯自适应控制的前提条件[3]。
nuscenes数据集 can_bus的 18 个数值 -回复

nuscenes数据集can_bus的18 个数值-回复Nuscenes数据集是一个广泛使用的自动驾驶数据集,它提供了丰富的数据,以帮助开发和评估自动驾驶系统。
其中之一是Can_bus的18个数值,本文将逐步解释这些数值的含义和用途。
Can_bus是一种常用的车载通信协议,用于传输汽车上各种传感器和控制单元之间的数据。
在Nuscenes数据集中,Can_bus的18个数值是通过车载Can_bus接口记录下来的。
这些数值包含了车辆运行过程中的许多重要信息,对于研究自动驾驶系统非常有用。
首先,我们来看一下这18个数值代表的具体含义。
1.时间戳(Timestamp):记录数据的采集时间,以秒或毫秒为单位。
2.车辆速度(Vehicle Speed):车辆当前的速度,以米/秒为单位。
3.转向角度(Steering Angle):车辆前轮转向的角度,以度为单位。
4.加速度(Acceleration):车辆当前的加速度,以米/秒²为单位。
5.转速(Engine RPM):引擎每分钟的旋转次数,以转/分钟为单位。
6.扭矩(Torque):引擎输出的扭矩,以牛顿·米为单位。
7.驻车制动器状态(Parking Brake Status):记录驻车制动器当前是否处于激活状态。
8.太阳能车顶状态(Solar Panel Roof Status):记录太阳能车顶是否处于开启或关闭状态。
9.制动压力(Brake Pressure):车辆制动系统当前的压力,通常以帕斯卡为单位。
10.离合器状态(Clutch Status):记录离合器是否处于脱离或结合状态。
11.电池电压(Battery Voltage):车辆电池系统当前的电压,通常以伏特为单位。
12.方向盘转向力矩(Steering Wheel Torque):记录驾驶员在方向盘上施加的力,以牛顿·米为单位。
13.方向盘转向角度(Steering Wheel Angle):记录方向盘当前的转向角度,以度为单位。
电动助力转向实验报告(3篇)

第1篇一、实验目的本次实验旨在了解电动助力转向系统(EPS)的工作原理、性能特点以及与传统液压助力转向系统的差异。
通过实验,验证EPS在提高转向效率、降低能耗、提升驾驶舒适性和安全性等方面的优势。
二、实验原理电动助力转向系统(EPS)是一种利用电动机作为动力源的新型动力转向装置。
与传统液压助力转向系统相比,EPS省去了液压泵、油管等液压部件,采用电机直接驱动转向机构,从而实现转向助力。
EPS系统主要由以下几部分组成:1. 信号传感装置:包括扭矩传感器、转角传感器和车速传感器,用于检测驾驶员的转向意图、方向盘转角和车速等信息。
2. 转向助力机构:包括电机、减速器、离合器等,用于根据驾驶员的转向意图和车速,提供相应的转向助力。
3. 电子控制单元(ECU):根据扭矩传感器、转角传感器和车速传感器的信号,控制电机的旋转方向和助力电流的大小,实现实时助力转向。
三、实验内容1. EPS系统组成及工作原理讲解。
2. EPS系统与传统液压助力转向系统的对比实验。
3. EPS系统在不同车速下的转向助力性能测试。
4. EPS系统在转向过程中抗干扰性能测试。
四、实验步骤1. 准备实验设备:EPS系统实验平台、扭矩传感器、转角传感器、车速传感器、数据采集器等。
2. 搭建实验平台,连接实验设备。
3. 根据实验要求,设置实验参数。
4. 进行EPS系统与传统液压助力转向系统的对比实验,记录数据。
5. 在不同车速下进行EPS系统的转向助力性能测试,记录数据。
6. 在转向过程中进行EPS系统的抗干扰性能测试,记录数据。
7. 分析实验数据,得出结论。
五、实验结果与分析1. EPS系统与传统液压助力转向系统的对比实验结果显示,EPS系统在转向效率、能耗、驾驶舒适性和安全性等方面均优于传统液压助力转向系统。
2. EPS系统在不同车速下的转向助力性能测试结果显示,EPS系统在不同车速下均能提供稳定的转向助力,且转向助力大小与车速成正比。
tcs功能原理
tcs功能原理TCS(Three Component System)功能原理一、引言TCS(Three Component System)是一种常用于汽车的车辆动态稳定控制系统,它可以通过感知车辆的各种状态参数,实时监测车辆的运动状态并对其进行控制,从而提高行车安全性。
本文将介绍TCS 的功能原理以及其工作流程。
二、TCS的功能原理TCS系统的主要功能是通过感知车辆的速度、方向盘转角、车轮转速等参数,判断车辆是否发生侧滑或抱死现象,并在发生此类情况时采取控制措施,使车辆保持稳定。
其原理主要包括以下三个方面:1. 车辆动态模型TCS系统首先需要建立车辆的动态模型,即根据车辆的质量、惯性矩、车轮半径等参数,计算出车辆的加速度、速度以及转向响应等。
这个动态模型的建立是TCS系统的基础,能够为后续的控制提供准确的参考。
2. 传感器数据采集与处理TCS系统通过多个传感器采集车辆的状态参数,如车轮转速、方向盘转角、车速等,并将这些数据传输给控制器进行处理。
传感器数据的准确性和实时性对TCS系统的正常工作至关重要,因此,传感器的选择和布置需要经过精心设计。
3. 控制算法实现TCS系统通过控制算法对传感器采集到的数据进行处理,并根据车辆的状态参数判断是否需要进行侧滑或抱死控制。
其中,侧滑控制主要通过控制车辆的刹车力分配来实现,而抱死控制则通过控制刹车系统的工作压力来实现。
控制算法需要根据车辆的动态模型和传感器数据进行优化,以确保系统的可靠性和稳定性。
三、TCS的工作流程TCS系统的工作流程可以总结为以下几个步骤:1. 数据采集:TCS系统通过传感器采集车辆的状态参数,如车轮转速、方向盘转角、车速等。
2. 数据处理:系统对采集到的数据进行处理,通过车辆动态模型计算出车辆的加速度、速度以及转向响应等。
3. 状态判断:系统根据车辆的状态参数判断是否发生侧滑或抱死现象。
如果发生侧滑或抱死现象,则进入下一步控制措施。
4. 控制措施:根据判断结果,TCS系统会对车辆进行控制措施,如调整刹车力分配、控制刹车系统的工作压力等,以保持车辆的稳定。
方向盘电子助力的力度测试方法
方向盘电子助力的力度测试方法
方向盘电子助力的力度测试方法可以按照以下步骤进行:
1. 准备测试设备:需要一台车辆,一台力度测试仪器(例如力传感器)和一台数据采集仪器。
2. 安装测试设备:将力度测试仪器安装在方向盘上,并将数据采集仪器连接到力度测试仪器上。
3. 校准测试设备:根据测试设备的要求,进行校准操作,确保测试结果的准确性。
4. 开始测试:启动车辆,将方向盘保持在静止状态,然后逐渐增加转向角度,记录下每个转向角度下的力度测试结果。
5. 数据分析:将测试数据导入到电脑中,进行数据分析,包括计算平均力度、最大力度、力度变化曲线等。
6. 结果评估:根据测试结果评估方向盘电子助力的力度是否符合设计要求,是否满足驾驶者的需求。
需要注意的是,测试时应该注意安全,确保测试过程中没有其他人员或障碍物。
另外,测试时应尽量模拟真实驾驶条件,如测试车辆在不同速度下的方向盘电子助力力度。
简述方向盘转角传感器工作原理
简述方向盘转角传感器工作原理
方向盘转角传感器是汽车行驶中的重要部件,它能检测汽车的行驶方向,从而可以精确控制汽车的行驶轨迹。
方向盘转角传感器工作原理可以用几个简单的步骤来总结。
首先,方向盘转角传感器由三个重要部件组成:一个激光器,一个汽车方向传感器,以及一个反射板。
激光器产生的激光光束照射到反射板上,反射板反射光谱被传感器探测,探测到的信号在传输给汽车电脑,电脑收集信号并据此控制汽车的转角方向。
其次,当司机调整方向盘的转角时,激光器会照射到反射板上,反射板会反射出不同的反射光谱,而传感器可以检测到不同的反射光谱,并将信号传输到汽车电脑,电脑分析信号,根据信号控制汽车的转角方向。
此外,方向盘转角传感器还与其它车内系统相结合,比如发动机控制系统等,当汽车经过一定转角时,传感器可以检测到汽车的转角,并告知发动机控制系统,发动机控制系统会根据信号调整发动机的转速,从而达到车辆安全行驶的目的。
最后,司机可以使用子系统精确控制汽车的行驶方向。
汽车电脑系统可以收集到传感器发送的信号,根据信号控制汽车在行驶中的转向方向,从而提高汽车的行驶精度,实现更加安全精准的行驶。
由此可见,方向盘转角传感器在汽车行驶中起着重要的作用,它能够准确测量汽车的转向方向,从而提高汽车的行驶精度,实现更加安全可靠的行驶。
它通过与发动机控制系统结合,调整汽车行驶方向,
这是一个很重要的系统,它能够为汽车的安全行驶做出重要的贡献。
迈锐宝等汽车用方向盘转角传感器工作原理研究

迈锐宝等汽车用方向盘转角传感器工作原理研究陈富安;李江江【摘要】汽车方向盘转角传感器能够监测方向盘的转角大小及转动方向,是汽车安全性驾驶的核心保障器件,可为电子车身稳定系统或者电动助力系统提供精确的转角位置信息.对其工作原理进行研究并与常见转角传感器工作原理进行对比,结果验证了其工作原理的优越性和可靠度,为汽车电子差速技术的发展奠定一定的基础.【期刊名称】《汽车实用技术》【年(卷),期】2015(000)004【总页数】3页(P4-6)【关键词】转角传感器;MLX90316;槽型光电;混合测圈【作者】陈富安;李江江【作者单位】河南工业大学电气工程学院,河南郑州450001;河南工业大学电气工程学院,河南郑州450001【正文语种】中文【中图分类】TP212.6CLC NO.: TP212.6 Document Code: A Article ID: 1671-7988(2015)04-04-03 目前,方向盘转角传感器SAS(steering wheel Angle sensor)主要有滑动电阻式、磁感应式、霍尔式和光电式等几种[1]。
而比较主流的转角传感器(如德国BOSCH生产的转角传感器LWS5)几乎都是利用转向柱大齿轮带动2个嵌入小磁铁的从动小齿轮转动,ECU检测到这2个从动小齿轮的转动角度,再通过软件程序计算出转向柱大齿轮的绝对转角[2]。
此种SAS虽然技术成熟、准确度高、寿命长,但其价格昂贵,不是电动汽车行业的理想选择,再加上此种SAS内部使用2个从动小齿轮,并且从动小齿轮上方都加有MLX90316转角传感器,从而导致结构紧凑,不利于安装,也增加了成本。
然而近期市面上以雪佛兰迈锐宝、别克新君威、别克新君越等为代表的欧美中型车,由于性能优越,价格适宜,同时具备豪华感,所以成为了大家所热捧的车型。
与此同时出现的这三款车型都能够使用的方向盘转角传感器,其型号为C68049XF25849366ANA761008A,由于价格低廉、通用性强、精度高、寿命长等优点为众多电动汽车制造商所青睐,本文针对这三款车型均可使用的SAS进行研究,分析其工作原理并运用matlab进行了仿真验证,说明了其优越性和可靠性。
方向盘转角传感器

数据处理技术: 通过采用先进 的数据处理技 术,提高传感 器的数据处理
能力。
02
• 数字信号处理技术 • 人工智能算法
拓展应用领域,实现多种传感器的融合
拓展应用领域:通过开发新型传感器和应用技术, 拓展传感器在更多领域的应用。
• 新型传感器开发 • 应用技术开发
多种传感器的融合:通过将方向盘转角 传感器与其他传感器融合,实现多种传
CREATE TOGETHER
DOCS
划。
02
• GPS导航系统 • 惯性导航系统
船舶行业的应用
船舶定位系统:通过测量舵轮旋转角度,辅助船舶定位和导航。
• GPS定位系统 • 惯性导航系统
船舶转向控制系统:通过测量舵轮旋转角度,实现船舶的精确转向。
• 船舶自动驾驶系统 • 船舶航向控制系统
航空航天行业的应用
飞行器控制系统:通过测量操纵杆旋转角度,实现 飞行器的精确控制。
• 飞行控制系统 • 导航系统
模拟器:通过测量操纵杆旋转角度,模 拟飞行器的飞行状态。
• 飞行模拟器 • 航天模拟器
04
方向盘转角传感器的发展趋势
提高传感器的测量精度和稳定性
提高测量精度:通过优化传感器结构和采用新型测 量原理,提高传感器的测量精度。
提高稳定性:通过改进传感器制造工艺 和提高材料性能,提高传感器的稳定性。
02
• 模拟驾驶过程 • 测量输出信号
方向盘转角传感器的标定设备和方法
标定设备:用于模拟方向盘的旋转角度,并提供标 准角度信号的装置。
• 方向盘旋转模拟器 • 角度信号发生器
标定方法:通过将传感器的输出信号与 标准角度信号进行比较,确定传感器的
性能参数。
转向盘力矩转角传感器非同轴安装误差分析
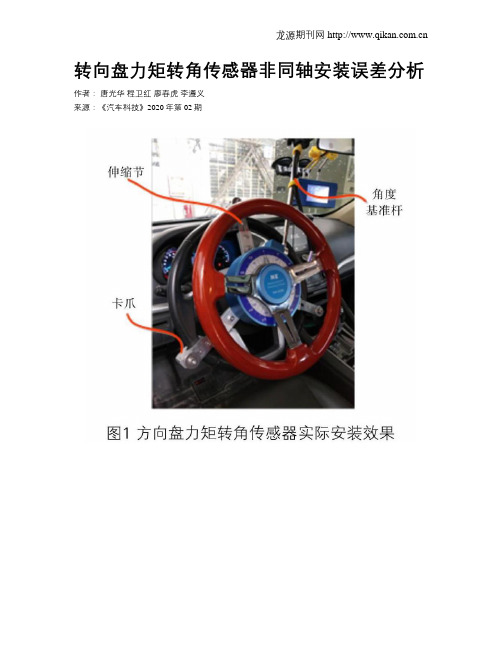
转向盘力矩转角传感器非同轴安装误差分析作者:唐光华程卫红廖春虎李遵义来源:《汽车科技》2020年第02期摘要:转向盘力矩转角传感器是一款专门用于转向盘参数测量的设备,由于传感器结构的设计缺陷会导致非同轴安装时产生角度测量误差。
本文针对非同轴安装后的机构对转向盘转矩以及对转向盘转角测量的影响进行了详细地分析。
对最大角度误差出现的位置,最大角度误差和偏心量之间的关系,角度基准杆长度变化和转向盘转角的对应关系以及基准杆长度变化量的最值进行了求解。
关键词:转向盘力矩转角传感器;非同轴安装;机构分析;误差分析;最大测角误差中图分类号:U463.4 文献标识码:A 文章编号:1005-2550(2020)02-0042-06唐光华毕业于湖北汽车工业学院车辆工程专业,工学学士,现任国家汽车质量监督检验中心(襄阳)项目管理工程师。
1前言转向盘力矩转角传感器是一款专门用于转向盘参数测量的设备,如图1所示。
可以使用该传感器直接或间接地获取转向盘转动过程中所产生的转向盘力矩、转向盘转角、转向力和转向角速度等数据。
方向盘力矩转角传感器内部一般使用光电编码器域旋转电位器对转角进行测量,同时需要一个固定在车体上的的角度基准杆来测量内部的测角传感器相对车体的转动角度。
传感器使用以应变电阻为核心的应变轴对转矩进行测量。
《GB/rr6323-2014汽车操纵稳定性试验方法》对转向盘转角、转向盘角速度和转向盘力矩的测量范围和记录系统的最大误差进行了限定。
因为试验对设备精度要求较高,所以有必要对影响精度的因素进行研究。
2转向盘力矩转角传感器偏心安装机构分析为了方便研究传感器与原车方向盘和车身组成的机构运动情况,以下使用机构运动简图來分析该传感器安装后的运动,机构理想的运动简图如图2所示:在该图中方向盘力矩转角传感器和原车方向盘都被简化成了螺旋副,只剩一个转动的自由度。
方向盘力矩转角传感器和原车方向盘之间同轴安装,没有偏心量。
传感器下部的过渡支架和原车方向盘固连在了一起。
简述方向盘转角传感器工作原理
简述方向盘转角传感器工作原理
方向盘转角传感器是一种用于测量车辆转向盘的转角的传感器。
它可以精确的测量车辆的转角,并可以将信息传输给其他系统,用于车辆控制系统的稳定性和安全性的提高。
方向盘转角传感器通常被安装在方向盘的后部,并与方向盘本身连接。
它的工作原理是,当方向盘被操作时,传感器会随着操作而发出特定的信号。
信号中可以携带方向盘转角的信息,从而使智能汽车能够正确识别方向盘当前的转角,从而可以正确识别车辆的行驶方向,保证行驶过程的正常性。
一般来说,方向盘转角传感器的组成分为三个部分。
其一为读取头部,这个部分主要由电感式传感器和电容式传感器组成,它们能够接收方向盘当前的转角信息;其二为传输器,这个部分可以将读取头部接收到的信息传输给其他系统;其三为处理器,该部分通过智能芯片实现信号的传输,从而最终形成方向盘转动角度的有效信号。
此外,方向盘转角传感器也可以与其他传感器配合使用,以提高测量精度。
比如,结合其他的位移传感器,可以实现对方向盘转角和车辆行进速度的联合测量。
使得车辆行驶的更加稳定可靠。
通过以上介绍,我们可以看出,方向盘转角传感器是一种能够有效测量车辆行驶方向的装置,它的准确性对于车辆控制系统的安全性起到了重要的作用,因此它是智能汽车的重要组成部分。
它的正确使用能够使智能汽车的安全性和稳定性得到极大的提高,从而给出现时用户带来更安全的驾驶体验。
基于CAN总线的转向角传感器采集电路设计

控制场由6位组成,其中4位是数据长度码(DLC3~DLC0),数据长度码代表数据场的字节数,最大为8,允许的数据长度为0~8 B。另外两位是扩展用的保留位,发送的保留位必须为0(显性)。
④数据场
数据场有0~8 B,8 bit/B,一般数据场最大为64 bit,对于复杂的数据,可以用2个或者多个字节来表示,但最多不能超过8 B。
3.1 TLE5012芯片角度测量原理
两个电桥起着重要作用,一个电桥的输出量随着磁场与芯片X方向的夹角x的变化而变化(称作X桥),而另一个电桥的输出量随着磁场与芯片Y方向的夹角?兹y的变化而变化(称作Y桥)[3],。
由图4可知,X桥与Y桥的输出量与磁场的角度变化有关,当磁场方向与芯片X桥方向的夹角为?渍时,X桥的最终输出信号为:
1 CAN总线技术特点
1.1 CAN总线原理介绍
CAN总线是一种串行通信协议,在汽车上应用广泛,可以分为以下3个专门的系统:
(1)动力CAN总线,其数据传输速度最高,达到500 kb/s,主要用于发动机、变速器、ESP等汽车动力系统的数据传输。
(2)舒适CAN总线,其数据传输速度较低,为100 kb/s,主要用于汽车空调系统、车窗门锁系统、座椅调节系统等。
从动齿轮B、C上分别固定一块相同的永磁体,磁体随着齿轮一起转动,两块永磁体的上方固定两个不动的TLE5012芯片。当主轴转动时,TLE5012芯片就能准确检测到两个从动齿轮所转动的角度。
(2)方向盘转角测量方案设计
一般汽车方向盘的转动范围约为4圈,即±720°左右,但TLE5012芯片测量的转角范围在0°~360°,所以必须使芯片的测量角度与方向盘转角对应起来。
基于上述要求,选择89C51内核的芯片,该芯片具有造价低、稳定性及功能强、使用寿命长的优点,其指令系统完全兼容传统的单片机系统,但处理速度更快,接口资源非常丰富,包括4个8位I/O数据接口,适用5 V电压等。
16位A/DCAN接口方向盘转角力矩采集系统

W AN G a g FU i GU O n —h , YU AN e Ch n , Ru , Yig s i W i
(c o l f tmo i , C a g a nvri ,Xia 1 04 C i ) Sh o o o bl Au e h n ’nU iesy t ’n7 6 , hn 0 a
计 算 机 工 程 与 设 计 C m u r ni en d e g 2 1, o 3, o 14 o pt E g er g n D s n e n i a i 01 V 1 2 N . 6 1 . 5
1 位 A DC N接 口方向盘转角力矩采集系统 6 / A
王 畅 , 付 锐 , 郭应 时 , 袁 伟
0 引 言
驾驶 员 的驾 驶行为直 接影响 到车 辆运行 安全性 。 为研 究
驾 驶 行 为 通 常 利 用 相 关传 感 器 采 集 驾驶 员 的 操 作 行 为表 征 参 数 。 驾 驶 员 操 作 次 数 最 多 的行 为 包 括 对 方 向盘 的操 作 , 加 对 速 、 动 及 离 合 器 踏 板 的 操 作 … 其 中 驾 驶 员 对 方 向盘 所 实 施 制 , 的操 作 是 驾 驶 行 为 的 典 型 表 征 行 为 。为 研 究 驾 驶 员 的方 向 盘 操 作 行 为 或 车 辆 的 操 作 稳 定 性 能 , 驾 驶 行 为 以 及 车 辆 操 稳 在 性 研 究 中通 常 使 用 方 向 盘 转 角 、 向 角 速 度 及 转 向力 矩 来 反 转
基于递推最小二乘法的转向系统参数辨识

基于递推最小二乘法的转向系统参数辨识李伟; 王洪民; 唐峥【期刊名称】《《重庆交通大学学报(自然科学版)》》【年(卷),期】2019(038)008【总页数】5页(P124-128)【关键词】车辆工程; 转向系统; 实时观测; 递推最小二乘法; 参数识别【作者】李伟; 王洪民; 唐峥【作者单位】重庆交通大学机电与车辆工程学院重庆400074【正文语种】中文【中图分类】U463.40 引言转向系统是控制汽车按指定路线和方向行驶的重要装置,精确的物理参数在对建立车辆系统动态数学模型和分析中起着至关重要的作用[1]。
针对系统的参数辨识,比较主流的辨识方法有模型自适应辨识算法[2]、最小二乘法[3-4]、扩展卡尔曼滤波法[5-6]、遗传算法[7]、扫频测试等。
其中扩展卡尔曼滤波法的P、Q矩阵很难确定,而且与系统状态密切相关;遗传算法对待估参数初值要求较高;扫频测试需要用不同的频率去激励系统,再用最小二乘法求得闭环系统的幅频特性与相频特性,最后利用MTLAB的INVFREQS函数进行拟合,这种算法采集到的数据不仅不多,而且还要进行两次拟合,会造成辨识出的参数结果精度不高;加之遗传算法和扫频测试也不能做到参数在线实时估计。
宗长富等[8]采用最小二乘法与遗传算法相结合的方法以TruckSim数据为基础离线辨识出了商用车三自由度模型的前轴侧偏刚度、后轴侧偏刚度、侧倾阻尼和侧倾刚度4个关键参数,并绘制出辨识出参数的MAP图,代入数学模型进行仿真验证。
结果表明:该方法能较准确辨识出系统模型的关键参数,关键参数MAP图能实时准确表征车辆的实时动态特性,为商用车参数估计和稳定性控制奠定了良好基础。
李凌阳[9]对车辆悬架系统的进行参数辨识研究,分别采用对数衰减法、频域法和面积法来辨识悬架系统的阻尼比,并利用系统模型辨识出车辆的簧上和簧下质量,对于研究悬架主动控制策略具有非常重要的意义。
首先利用MATLAB进行递推最小二乘法仿真,结果表明,该方法能够快速有效准确地估计出系统参数;然后MicroAutoBox发出PWM波控制P-EPS驱动版中“H”桥中4个功率晶体管的通断,利用博世传感器采集转向系统中方向盘的转角,系统的输入电流由驱动板采集,根据采集的电流和转角编写递推最小二乘法,对未知转向系统的有关参数进行在线估计。
电子转向系统的原理及应用

电子转向系统的原理及应用1. 介绍电子转向系统是一种使用电子技术实现车辆转向控制的系统。
相比传统的机械转向系统,电子转向系统具有更高的精度、可靠性和灵活性。
本文将介绍电子转向系统的原理、工作方式以及在汽车行业中的应用。
2. 原理电子转向系统的原理主要基于车辆的传感器和电子控制单元(ECU)的配合工作。
下面是电子转向系统的工作原理的列点说明:•传感器数据采集: 电子转向系统使用各种传感器来采集车辆转向相关的数据,例如车速、方向盘转角、路面摩擦系数等。
•数据处理: 传感器采集到的数据通过ECU进行处理和分析,ECU会根据这些数据来计算出最佳的转向输出给驱动电机。
•电机输出: ECU将计算得到的转向输出信号发送给驱动电机,电机将根据这个信号控制转向器的运动,进而实现车辆的转向功能。
•转向助力: 电子转向系统还可以根据车速和驾驶员的转向意图,进行转向助力的控制,使得驾驶变得更加轻松和舒适。
3. 工作方式电子转向系统根据不同的工作方式可以分为两种类型:助力电子转向系统和完全电子转向系统。
3.1 助力电子转向系统助力电子转向系统是在传统机械转向系统基础上添加了电子转向助力功能,主要工作原理如下:•当检测到驾驶员施加转向力时,传感器将此信号传递给ECU。
•ECU通过处理传感器信号,计算出相应的转向助力信号。
•这个转向助力信号被送到驾驶电机,驾驶电机根据信号控制助力器,提供适当的助力力矩。
•驾驶员通过助力器获得额外的转向力矩,从而使转向更加轻松。
助力电子转向系统能够根据车速和驾驶员的转向意图自动调节转向助力力矩的大小,为驾驶员提供更好的操控感受。
3.2 完全电子转向系统完全电子转向系统是将机械转向系统完全替换为电子转向系统,主要工作原理如下:•方向盘转角传感器检测驾驶员的转向意图,并将转向角度信息传递给ECU。
•ECU根据方向盘转角信息和其他传感器数据,计算出最佳的转向输出信号。
•转向输出信号通过驱动电机输出给转向器,转向器根据信号控制车轮的转向运动。
详解车辆稳定控制系统及典型故障案例(二)

详解车辆稳定控制系统及典型故障案例(二)作者:杨老师来源:《汽车维修与保养》 2018年第1期( 接上期)上期,我们介绍了ABS、ASR、打滑率、车速来源等内容,接下来我们再来聊聊车身稳定控制系统控制原理。
5.车身稳定控制系统原理对于车身稳定控制系统的原理,各车厂或供应商的说法各异。
根据笔者的理解,简而言之:车身稳定控制系统模块借助方向盘转向信号和车速信号计算出合理的车身惯性目标值,根据惯性、轮速传感器检测到实际的车身姿态,两者进行对比后,通过对动力输出进行修正或采取额外的制动调节,达到稳定车身姿态的控制。
其控制逻辑,如下图5所示。
从常规意义来讲,我们常说的车辆不稳定的状态多是指横向(侧向)方面的不稳定,其常见表现形式有转向不足和转向过度两种。
简单理解,转向不足就是“转不过来了”,转向过度就是“转过头了”。
图6所示为转向不足和转向过度的效果图。
车辆出现转向不稳定的状态时,车身控制模块将采取不同的控制策略。
转向不足时,系统就会增加内侧的制动力,以减小转向半径;转向过度时,系统会增加外侧的制动力,以增大转向半径。
增加向前的扭矩是减小制动,增加向后的扭矩是增加制动力。
图7所示的是车身稳定控制系统的控制策略。
当车辆出现不稳定状态时,车身稳定控制系统就会控制相关的电磁阀对各个车辆的制动压力进行调节,从而达到车身行驶稳定的目的。
常见的车身稳定系统一般有12个电磁阀分别控制液压阀体中的机械阀,进行制动油压调节。
每个车轮上的制动分泵分别对应一个常开的进口阀(IN)和一个常闭的出口阀(OUT),这样4个车轮就需要8个电磁阀(图8)。
因为常规的汽车制动系统,从总泵分出来的是两组制动管路,总泵上的每条制动管路为两个车轮提供制动压力,或为前后布置形式、或为“X”型布置形式。
为了实现压力保持以及一些辅助功能(如坡道起步),在总泵后的每条制动管路上,又分别设置了一个常开的吸压阀和一个常闭的切断阀。
具体的液压管路设计(仅以刹车总泵的一条管路为例),如图9所示。
转向角度传感器工作原理
转向角度传感器工作原理今天咱们来唠唠汽车里一个超酷的小玩意儿——转向角度传感器。
这东西可神奇啦,就像汽车的小管家,时刻知道方向盘转了多少度呢。
你想啊,当你开着车在路上,转动方向盘的时候,这个转向角度传感器就在默默工作啦。
它呀,其实就是一种检测装置。
简单来说呢,它是要搞清楚方向盘转动的角度大小和转动的方向。
这就好比你跳舞的时候,有个小助手在旁边看着你的动作幅度和方向一样。
那它是怎么做到的呢?这里面的学问可不少呢。
一般来说,转向角度传感器里面有一些很精密的部件。
比如说,有的是通过光电感应的原理来工作的。
就像我们小时候玩的那种用光照来触发反应的小玩具一样。
在传感器里有发光元件和感光元件。
当方向盘转动的时候,会带动一些特殊的结构,这些结构会改变光线传播的路径或者遮挡光线。
感光元件就会发现光线的变化啦,然后就会把这个变化转化成电信号。
这个电信号就像是一种特殊的密码,告诉汽车的电脑系统,方向盘转了多少度,是向左转还是向右转。
还有一种呢,是利用磁场的原理。
你知道磁铁吧,那种能吸住小铁钉的神奇东西。
在转向角度传感器里,也有类似磁场相关的设计。
当方向盘转动的时候,会影响磁场的分布或者磁场里某些部件的位置。
就好像是一群小磁针,本来排得整整齐齐的,你一动方向盘,它们就像被打乱了队形一样。
而传感器就能感知到这种磁场的变化,同样也把它变成电信号传给汽车的大脑——电脑系统。
你可别小看这个转向角度传感器哦。
它对于汽车的安全和正常行驶有着超级重要的作用呢。
比如说,汽车的电子稳定系统(ESP)就特别依赖它。
当你在紧急转弯的时候,如果没有这个准确的转向角度信息,ESP就不知道该怎么调整车轮的制动和动力输出了。
那就可能会导致汽车失控,就像一个没头的苍蝇一样乱撞。
还有啊,自动泊车功能也离不开它。
要是不知道方向盘转了多少度,汽车怎么能准确地停进车位里呢?那就会停得歪歪扭扭的,说不定还会撞到旁边的车呢。
而且啊,这个转向角度传感器还能给我们带来一些很贴心的驾驶体验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
方向盘转向角传感器的数据采
自适应前照明系统(AFS),是一种能适应各种不同环境条件的智能前照灯系统,获得汽车在转弯处的参数,如:转向角,角速度以及转向,是汽车前向灯自适应控制的前提条件。
为了获得这些参数,采用了方向盘转向角传感器,它能测试出方向盘的转向角,转向角速度以及转向三个参数,这几个参数在一定程度上能反映汽车在转弯处的行驶状态,准确地获取这些参数具有重要意义。
因而设计了基于ARM的数据采集系统。
在这个采集系统中方向盘转向角传感器采集到的数据通过CAN总线传送到ARM中,并对其进行相应数据处理。
1 方向盘转向角传感器数据采集系统的结构框图
方向盘转向角传感器数据采集系统包括转向角传感器,CAN总线和ARM微控制器三个部分。
方向盘转向角传感器是通过CAN总线的方式传送采集到的信号,控制器采用的是ARM微处理器,系统具体的结构框图如图1所示。