数字信号处理_第二版_吴镇扬_课后答案_khdaw
数字信号处理_吴镇扬_习题解答 第二版

1. 解丗由题意可知 N=5
则周期为丗其中为整数丆且满足使N为最小整数。
2. •i1•j解丗由题意可知 N=14
则周期为丗
•i2•j解丗由题意可知 N= 8
则
则所求周期 N=14
最小公倍数丆即为丗56
3.19 (1)周期卷积的主值序列为丗f(n)R(n) ={6,3, 6,10,14,12,9};
(2)循环卷积f (n) ={6,3, 6,10,14,12,9};
•i3•j线性卷积为f(n) ={1,3, 6,10,14,12,9,5, 0, 0, 0, 0}
2.21 •i 第二种方法乯按频率抽取算法丗输入顺
序丆
输出倒序(0,8,4,12,2,10,6,14,1,9,5,13,3,11,7, 15);
4
共有4(16=2*2*2*2 )节
第一节丗数据点间距、蝶形类型均是8•C
0 1 2 3 4 5 6 7
所乘因子丗W ,W ,W ,W ,W ,W ,
W ,W ;
N N N N N N N N N
第二节丗数据点间距、蝶形类型均是4 •C
0 2 4 6
所乘因子丗W ,W ,W ,W ;
N N N N
0 4
第三节丗数据点间距、蝶形类型均是2 •C所乘因
子丗W ,W ;
N N
第四节丗数据点间距、蝶形类型均是1 •C所乘因
子丗W ;
N。
数字信号处理课后习题答案(吴镇扬)

习题一 (离散信号与系统)1.1周期序列,最小周期长度为5。
1.2 (1) 周期序列,最小周期长度为14。
(2) 周期序列,最小周期长度为56。
1.5()()()()()()()11s a s s s a n s s a s n X j x t p t X j ΩP j Ω2n τn τj sin j Ωjn e X 2n π2n n τj Sa X j jn e 2T 2πττ∞=-∞∞=-∞Ω==*⎡⎤⎣⎦ΩΩ⎛⎫-=-Ω ⎪⎝⎭ΩΩ⎛⎫-=Ω-Ω ⎪⎝⎭∑∑F 1.6 (1) )(ωj e kX (2) )(0ωωj n j e X e (3) )(21)(2122ωωj j e X e X -+ (4) )(2ωj e X1.7 (1)0n z -(2)5.0||,5.0111>--z z(3)5.0||,5.0111<--z z(4)0||,5.01)5.0(11101>----z zz1.8 (1) 0,)11()(211>--=---z z z z z X N (2) a z az az z X >-=--,)1()(211(3)a z az z a az z X >-+=---,)1()(311211.9 1.10(1))1(2)(1----+n u n u n (2))1(24)()5.0(6--⋅--n u n u n n (3))()sin sin cos 1(cos 000n u n n ωωωω++(4) )()()(1n u a a a n a n ---+-δ1.11 (1) )(1z c X - (2) )(2z X (3) )()1(21z X z -+ (4) -+<<x x R z R z X /1/1),/1(1.12 (1)1,11<-ab ab(2) 1 (3) 00n a n1.13 (1) 该系统不是线性系统;该系统是时不变系统。
数字信号处理(吴镇扬)课后习题答案(比较详细的解答过程)chap6
至今, 至今,我们讨论的信号处理的各种理论与算法 视为恒定值, 都是把抽样频率 f s 视为恒定值,即在一个数字系 统中只有一个采样率。 统中只有一个采样率。 在实际数字信号处理系统中, 在实际数字信号处理系统中,经常会遇到采样 率转换问题。 率转换问题 。 或者要求一个数字系统能工作在 多采样率”状态, “多采样率”状态,或者要求其将采样信号转换 为新的采样率下工作。 为新的采样率下工作。
6.2 信号的插值
如果将 x(n) 的抽样频率 f s 增加 L 倍, w(n), w(n) 即 得 的插值,用符号↑ 表示。插值的方法很多, 是对 x(n) 的插值,用符号↑L 表示。插值的方法很多, 一个简单的方法就是信号抽取的逆处理过程。 一个简单的方法就是信号抽取的逆处理过程。 回想信号抽取前后的傅立叶变换关系
而 X 1 (e ) =
jω n = −∞
∞
∑ x ( n ) p ( n)e
− jωn
1 M −1 j 2πnk / M − jωn = ∑ [ x ( n) ]e ∑e n = −∞ M k =0 1 M −1 = X (e j (ω − 2πk / M ) ) (6.3b (6.3b) ∑ M k =0
信号抽取示意图,M=3, 图6.1.1 信号抽取示意图,M=3,横坐标为抽样点数 原信号; 中间信号; (a)原信号;(b)中间信号;(c)抽取后的信号
显然
X ′(e ) = ∑ x′(n)e
jω n = −∞ ∞ n = −∞ ∞
∞
− j ωn
= ∑ x( Mn)e
n = −∞
∞
− j ωn
= ∑ x1 ( Mn)e − jωn = X 1 (e jω / M ) (6.3a) (6.3a
数字信号处理课后习题答案(全)1-7章
第 1 章 时域离散信号和时域离散系统
(6) y(n)=x(n2)
令输入为
输出为
x(n-n0)
y′(n)=x((n-n0)2) y(n-n0)=x((n-n0)2)=y′(n) 故系统是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n2)+bx2(n2) =aT[x1(n)]+bT[x2(n)]
第 1 章 时域离散信号和时域离散系统
题4解图(一)
第 1 章 时域离散信号和时域离散系统
题4解图(二)
第 1 章 时域离散信号和时域离散系统
题4解图(三)
第 1 章 时域离散信号和时域离散系统
(4) 很容易证明: x(n)=x1(n)=xe(n)+xo(n)
上面等式说明实序列可以分解成偶对称序列和奇对称序列。 偶对称序列可 以用题中(2)的公式计算, 奇对称序列可以用题中(3)的公式计算。
(2) y(n)=x(n)+x(nN+1)k 0
(3) y(n)= x(k)
(4) y(n)=x(n-nn0)n0
(5) y(n)=ex(n)
k nn0
第 1 章 时域离散信号和时域离散系统
解:(1)只要N≥1, 该系统就是因果系统, 因为输出 只与n时刻的和n时刻以前的输入有关。
如果|x(n)|≤M, 则|y(n)|≤M, (2) 该系统是非因果系统, 因为n时间的输出还和n时间以 后((n+1)时间)的输入有关。如果|x(n)|≤M, 则 |y(n)|≤|x(n)|+|x(n+1)|≤2M,
=2x(n)+x(n-1)+ x(n-2)
将x(n)的表示式代入上式, 得到 1 y(n)=-2δ(n+2)-δ(n+1)-0.5δ(2n)+2δ(n-1)+δ(n-2)
吴镇扬数字信号处理课后习题答案
jw0 n
u (n)] e jw0n z n
n 0
1 1 (e jw0 z 1 )
(1) 解:令 y (n) RN (n)
由题意可知,所求序列等效为 x (n 1) y (n) y (n) 。
Z [ y (n)] z n
n 0
N 1
1 zN z N 1 , 1 z 1 z N 1 ( z 1)
1
A B 1 2 1 1 1 1 z 1 2z 1 z 1 2 z 1 B 1 | 1 2 1 z 1 z 1 2
1 | 1 1 1 2 z 1 z 1
x(n) u (n) 2 2 n u ( n 1) u (n) 2 n 1u ( n 1)
n0
若n0 0时,收敛域为:0 z ;
(2) 解: Z [0.5 u (n)]
n
若n0 0 时,收敛域为: z 0 z 0.5
0.5
n 0
n
z n
1
1 , 1 0.5 z 1
n
(3) 解: Z [ 0.5 u ( n 1)]
n
n
j j 1 1 (3) X (e 2 ) X ( e 2 ) 2 2 j
(2) e
j n0
X (e j ) (移位特性)
2
数字信号处理习题指导
G ( z ) ZT [ x (2n)] G( z)
n
g ( n )e
jwn
令n' 2n, 则
n ' 取偶数
( z 5) z n |z 0.5 (1 0.5 z)
数字信号处理(吴镇扬)课后习题答案(比较详细的解答过程)chap5-6PPT课件
-
6
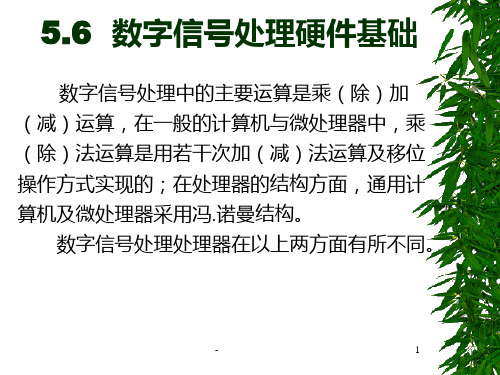
5.6.1.2 哈佛结构
数字信号处理一般需要较大的数据流量和较 高的运算速度,为了提高数据吞吐量,在数字 信号处理器中大多采用哈佛结构,如图5.6-2。
程序总线
数据总线
程序 存储器
CPU
操作数 存储器
图5.6-2 哈佛结构
-
7
与冯.诺曼结构处理器比较,哈佛结构处理 器有两个明显的特点:
(1)使用两个独立的存储器模块,分别存储 指令和数据,每个存储模块都不允许指令和数 据并存;
,而是数据的组织和地址的产生。以FFT运算为
例,要求并行存取N/2个数据点,由于一般的存
储器在每个周期里只能在总线上传输一个数据,
因此,并行处理要有专门的缓冲区以要求的吞吐
率来高速度地供应数据,数据地址也必须高速产
生。
-
19
5.6.2 DSP硬件构成
典型的DSP处理器中的运算/处理功能单元 主要包括以下几个部分:
•采用哈佛结构(多总线结构,即程序存储器 和数据存储器分开,各有各的总线,或地址总 线和数据总线分开),甚至采用多地址总线 和多数据总线。还采用流水线及并行结构。
-
2
5.6.1 数字信号处理器结构特点
5.6.1.1 冯.诺曼结构 1945年,冯.诺曼首先提出了“存储程序”
的概念和二进制原理,后来,人们把利用这种 概念和原理设计的电子计算机系统统称为“冯. 诺曼型结构”计算机。冯.诺曼结构的处理器使 用同一个存储器,经由同一个总线传输,如图 5.6-1。
期的循环操作足够长时,或是对一系列数据反
复执行同一指令时,采用流水线处理方式才是
合理的。
-
17
5.6.1.4 并行处理
加快运算速度的另一种方法是采用并行处 理,这种方法克服了流水线方法要把一个处理 分解为若干子处理的困难。
数字信号处理课后习题答案(全)1-7章
2. 给定信号:
2n+5
-4≤n≤-1
(x(n)=
6
0
0≤n≤4 其它
(1) 画出x(n)序列的波形, 标上各序列值;
(2) 试用延迟的单位脉冲序列及其加权和表示x(n)序列;
第 1 章 时域离散信号和时域离散系统
(3) 令x1(n)=2x(n-2), 试画出x1(n)波形; (4) 令x2(n)=2x(n+2), 试画出x2(n)波形; (5) 令x3(n)=x(2-n), 试画出x3(n)波形。 解: (1) x(n)序列的波形如题2解图(一)所示。 (2) x(n)=-3δ(n+4)-δ(n+3)+δ(n+2)+3δ(n+1)+6δ(n)
第 1 章 时域离散信号和时域离散系统
题8解图(一)
第 1 章 时域离散信号和时域离散系统
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3)
h(n)=2δ(n)+δ(n-1)+ δ(n-2)
由于
x(n)*δ(n)=x(n)
1
x(n)*Aδ(n-k)=Ax(n-k)
2
故
第 1 章 时域离散信号和时域离散系统
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ(n-2) 1 2
, 这是2π有理1数4, 因此是周期序
3
(2) 因为ω=
,
所以
1
8
=16π, 这是无理数, 因此是非周期序列。
2π
第 1 章 时域离散信号和时域离散系统
4. 对题1图给出的x(n)要求:
(1) 画出x(-n)的波形;
数字信号处理实验(吴镇扬)答案-2
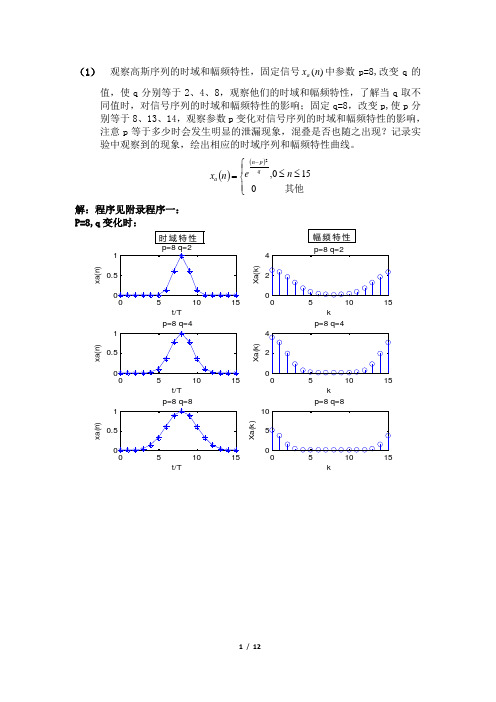
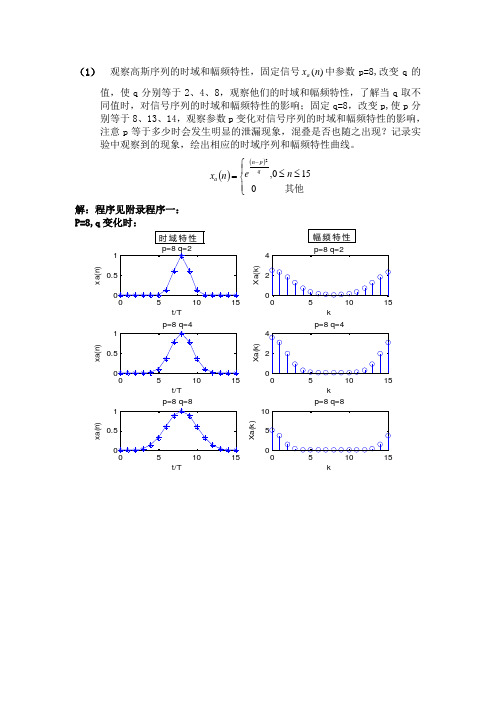
(1) 观察高斯序列的时域和幅频特性,固定信号)(n x a 中参数p=8,改变q 的值,使q 分别等于2、4、8,观察他们的时域和幅频特性,了解当q 取不同值时,对信号序列的时域和幅频特性的影响;固定q=8,改变p,使p 分别等于8、13、14,观察参数p 变化对信号序列的时域和幅频特性的影响,注意p 等于多少时会发生明显的泄漏现象,混叠是否也随之出现?记录实验中观察到的现象,绘出相应的时域序列和幅频特性曲线。
()()⎪⎩⎪⎨⎧≤≤=-其他0150,2n e n x q p n a解:程序见附录程序一:P=8,q 变化时:t/T x a (n )k X a (k )t/T x a (n )p=8 q=4k X a (k )p=8 q=4t/Tx a (n )p=8 q=8kX a (k )p=8 q=8幅频特性时域特性t/T x a (n )p=8 q=8k X a (k )p=8 q=8t/T x a (n )51015k X a (k )p=13 q=8t/Tx a (n )p=14 q=851015kX a (k )p=14 q=8时域特性幅频特性分析:由高斯序列表达式知n=p 为期对称轴; 当p 取固定值时,时域图都关于n=8对称截取长度为周期的整数倍,没有发生明显的泄漏现象;但存在混叠,当q 由2增加至8过程中,时域图形变化越来越平缓,中间包络越来越大,可能函数周期开始增加,频率降低,渐渐小于fs/2,混叠减弱;当q 值固定不变,p 变化时,时域对称中轴右移,截取的时域长度渐渐地不再是周期的整数倍,开始无法代表一个周期,泄漏现象也来越明显,因而图形越来越偏离真实值,p=14时的泄漏现象最为明显,混叠可能也随之出现;(2) 观察衰减正弦序列 的时域和幅频特性,a=0.1,f=0.0625,检查谱峰出现的位置是否正确,注意频谱的形状,绘出幅频特性曲线,改变f ,使f 分别等于0.4375和0.5625,观察这两种情况下,频谱的形状和谱峰出现的位置,有无混叠和泄漏现象?说明产生现象的原因。
数字信号处理课后答案课件

傅里叶变换的性质
线性性质
若离散信号x(n)和y(n)的 傅里叶变换分别为 X(e^jωn)和Y(e^jωn), 则对于任意实数a和b,有 aX(e^jωn) + bY(e^jωn) 的傅里叶变换等于 aX(e^jωn)和bY(e^jωn) 的傅里叶变换之和。
从而实现信号的分离、抑制或提 取。
滤波器分类
根据不同的特性,滤波器可分为 低通、高通、带通和带阻滤波器,
每种滤波器都有各自的应用场景 和特点。
滤波器原理
滤波器的原理是基于频率响应, 即不同频率的信号经过滤波器后, 其幅度和相位会发生不同的变化。
IIR滤波器设计
IIR滤波器概述
IIR滤波器设计方法
IIR滤波器稳定性
在设计IIR滤波器时,需要考虑其稳定 性。如果系统函数的极点位于单位圆 外,则系统不稳定,可能会导致无穷 大的输出。因此,在设计过程中需要 进行稳定性分析。
FIR滤波器设计
FIR滤波器概述
FIR(Finite Impulse Response)滤 波器是一种具有有限冲击响应的数字 滤波器,其系统函数可以表示为有限 项之和。
插值法
对于非周期性的连续时间信号,可以通过插值法得到离散时间信号。常用的插值方法包括 线性插值、多项式插值、样条插值等。
傅里叶变换法
对于任何连续时间信号,可以通过傅里叶变换将其转换为频域表示形式,然后对频域表示 形式进行采样,得到离散时间信号。再通过逆傅里叶变换将其转换回时域表示形式。
05 第五章 信号的分 析与合成
抽样定理的充分性
对于任何连续时间信号,如果其最高频率分量小于等于fmax,则可 以通过其抽样信号无失真地重建出原信号。
《数字信号处理》第二版课后答案

————第一章———— 时域离散信号与系统理论分析基础本章1.1节“学习要点”和1.2节“例题”部分的内容对应教材第一、二章内容。
为了便于归纳总结,我们将《数字信号处理(第二版)》教材中第一章和第二章的内容合并在一起叙述,这样使读者对时域离散线性时不变系统的描述与分析方法建立一个完整的概念,以便在分析和解决问题时,能全面考虑各种有效的途径,选择最好的解决方案。
1.1 学 习 要 点1.1.1 时域离散信号——序列时域离散信号(以下简称序列)是时域离散系统处理的对象,研究时域离散系统离不开序列。
例如,在时域离散线性时不变系统的时域描述中,系统的单位脉冲响应()n h 就是系统对单位脉冲响应()n δ的响应输出序列。
掌握()n δ的时域和频域特征,对分析讨论系统的时域特性描述函数()n h 和频域特性描述函数()ωj e H 和()z H 是必不可少的。
1. 序列的概念在数字信号处理中,一般用()n x 表示时域离散信号(序列)。
()n x 可看作对模拟信号()t x a 的采样,即()()nT x n x a =,也可以看作一组有序的数据集合。
要点 在数字信号处理中,序列()n x 是一个离散函数,n 为整数,如图1.1所示。
当≠n 整数时,()n x 无定义,但不能理解为零。
当()()nT x n x a =时,这一点容易理解。
当=n 整数时,()()nT x n x a =,为()t x a 在nT t =时刻的采样值,非整数T 时刻未采样,而并非为零。
在学习连续信号的采样与恢复时会看到,()n x 经过低通滤波器后,相邻的()T n nT 1~+之间的()t x a 的值就得到恢复。
例如,()n x 为一序列,取()()2n x n y =,n 为整数是不正确的,因为当=n 奇数时,()n y 无定义(无确切的值)。
2. 常用序列常用序列有六种:①单位脉冲序列()n δ,②矩形序列()n R N ,③指数序列()n u a n,④正弦序列()n ωcos 、()n ωsin ,⑤复指数序列nj eω,⑥周期序列。
数字信号处理_吴镇扬_第二版_第五章习题答案
5.7 (1)由于h2(n)是h1(n)圆周移位的序列,根据DFT的 2π 性质有: −j 4k − jπ k
H 2 (k ) = e
8
H 1 (k ) = e
H 1 (k )
~ ~ H1 ( k ) = H 2 ( k ) 成立 所以
(2)由于h1 (n ) 和h2 (n ) 均为偶对称序列,以其构成的低通滤波器
(3)若采用海明窗设计,则
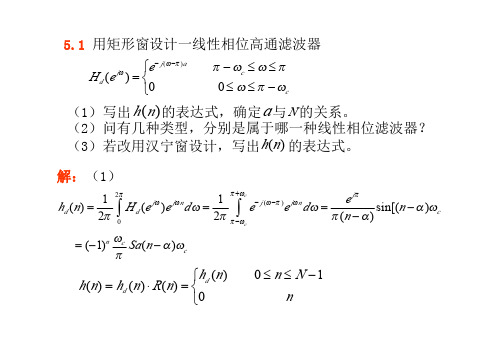
⎡ ⎛ 2πn ⎞⎤ wHam ( n) = ⎢0.54 − 0.46 cos ⎜ ⎟ ⎥ RN ( n ) ⎝ N − 1 ⎠⎦ ⎣ 2 h( n) = sin[(n − α )ωc ]cos[(n − α )ω0 ]wHam (n) N 为奇数时, (n − α )π
h( n N 为偶数时, ) =
0 −ωc
e − jωα e jω nd ω
可见h(n)关于(N-1)/2偶对称,即 h( n) = h( N − 1 − n)
(1)当 N 为奇数时,为第一类滤波器。 (2)当N为偶数时,为第二类滤波器
⎧hd ( n) h( n) = hd ( n) ⋅ R(n ) = ⎨ ⎩0 0 ≤ n ≤ N −1
解:由经验公式可知若 不小于 At 40dB , 则
β = 0.5842 At - 21)0.4 + 0.07886(At - 21) ≈ 3.3953 ( At − 8 40 − 8 N= = ≈ 22.28 2.286∆ω 2.286× 0.2π ωc + ωr ωc′ = = 0.2π 2 ′ ⎧ωc ′ ⎪ π Sa[ωc (n − α )] n ≠ α ′ 1 ωc − jωα jωn ⎪ hd (n) = ∫ ′ e e dω = ⎨ ′ 2π −ωc ωc ⎪ n =α ⎪ ⎩ π
数字信号处理课后习题答案(全)1-7章
最后结果为 0
n<0或n>7
y(n)= n+1 0≤n≤3 8-n 4≤n≤7
y(n)的波形如题8解图(一)所示。 (2) y(n) =2R4(n)*[δ(n)-δ(n-2)]=2R4(n)-2R4(n-2)
=2[δ(n)+δ(n-1)-δ(n+4)-δ(n+5) y(n)的波形如题8解图(二)所示
因此系统是非线性系统。
第 1 章 时域离散信号和时域离散系统
(6) y(n)=x(n2)
令输入为
输出为
x(n-n0)
y′(n)=x((n-n0)2) y(n-n0)=x((n-n0)2)=y′(n) 故系统是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n2)+bx2(n2) =aT[x1(n)]+bT[x2(n)]
因此系统是非时变系统。
第 1 章 时域离散信号和时域离散系统
(5) y(n)=x2(n)
令输入为
输出为
x(n-n0)
y′(n)=x2(n-n0) y(n-n0)=x2(n-n0)=y′(n) 故系统是非时变系统。 由于
T[ax1(n)+bx2(n)]=[ax1(n)+bx2(n)]2 ≠aT[x1(n)]+bT[x2(n) =ax21(n)+bx22(n)
第 1 章 时域离散信号和时域离散系统
题4解图(一)
第 1 章 时域离散信号和时域离散系统
题4解图(二)
第 1 章 时域离散信号和时域离散系统
题4解图(三)
第 1 章 时域离散信号和时域离散系统
(4) 很容易证明: x(n)=x1(n)=xe(n)+xo(n)
第二章 数字信号处理 khdaw
=ay1(n)+by2(n) 故该系统是线性系统。 由于
π 2π (n-k)+ ] 6 3 π 2π T[x(n-k)]=x(n-k)sin[ n+ ] 6 3
y(n-k)=x(n-k)sin[
因而有 T[x(n-k)]≠y(n-k) 帮该系统是移变系统。 设 |x(n)|≤M,则有 |y(n)|=|x(n)sin[
n −t n m = −∞
因
y(n-k)=
k = −∞
∑ x(k ) =
∑ x(m − t )
=T[x(n-t)] 所以该系统是非移变系统。
n
设 x(n)=M<∞
y(n)=
k = −∞
∑ M =∞,所以该系统是不稳定系统。
n k =n 0
因y(n)只取决于现在和过去的输入x(n),不取决于未来的输入,故该系统是因果系统。
n −t n m=n0 +t
故该系统是线性系统。 因 y(n-k)=
k =n0
∑ x(k ) =
n
∑ x(m − t )
≠T[x(n-t)]= 所以该系统是移变系统。
k = n0
∑ x(m − t )
设 x(n)=M,则 lim y(n)= lim (n-n 0 )M= ∞ ,所以该系统不是稳定系统。
∞
(2)y(n)= x(n)sin[
n
2π π n+ ] 3 6
(3)y(n)=
k = −∞
∑ x(k )
(4)y(n)=
k = n0
∑ x(k )
(5)y(n)= x(n)g(n)
解 (1)设 y 1 (n)=2x 1(n)+3,y 2 (n)=2x 2 (n)+3,由于 y(n)=2[x 1(n)+x 2 (n)]+3 ≠y 1 (n)+ y 2 (n) =2[x 1(n)+x 2 (n)]+6 故系统不是线性系统。 由于 y(n-k)=2x(n-k)+3,T[x(n-k)]=2x(n-k)+3,因而 y(n-k) = T[x(n-k)] 故该系统是非移变系统。 设|x(n)|≤M,则有 |y(n)|=|2x(n)+3|≤|2M+3|<∞ 故该系统是稳定系统。 因 y(n)只取决于现在和过去的输入 x(n),不取决于未来的输入,故该系统是因果系统。 (2)设
数字信号处理(吴镇扬)课后习题答案(比较详细的解答过程)第二章测试训练题解
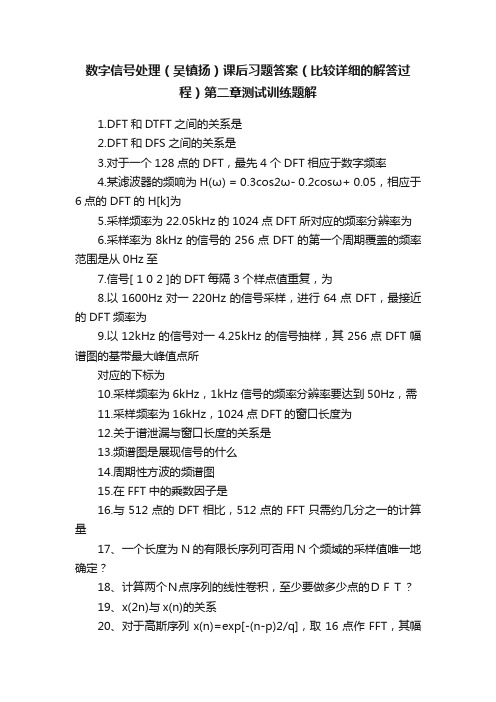
数字信号处理(吴镇扬)课后习题答案(比较详细的解答过程)第二章测试训练题解1.DFT和DTFT之间的关系是2.DFT和DFS之间的关系是3.对于一个128点的DFT,最先4个DFT相应于数字频率4.某滤波器的频响为H(ω) = 0.3cos2ω- 0.2cosω+ 0.05,相应于6点的DFT的H[k]为5.采样频率为22.05kHz的1024点DFT所对应的频率分辨率为6.采样率为8kHz的信号的256点DFT的第一个周期覆盖的频率范围是从0Hz至7.信号[ 1 0 2 ]的DFT每隔3个样点值重复,为8.以1600Hz对一220Hz的信号采样,进行64点DFT,最接近的DFT频率为9.以12kHz的信号对一4.25kHz的信号抽样,其256点DFT幅谱图的基带最大峰值点所对应的下标为10.采样频率为6kHz,1kHz信号的频率分辨率要达到50Hz,需11.采样频率为16kHz,1024点DFT的窗口长度为12.关于谱泄漏与窗口长度的关系是13.频谱图是展现信号的什么14.周期性方波的频谱图15.在FFT中的乘数因子是16.与512点的DFT相比,512点的FFT只需约几分之一的计算量17、一个长度为N的有限长序列可否用N个频域的采样值唯一地确定?18、计算两个N点序列的线性卷积,至少要做多少点的DFT?19、x(2n)与x(n)的关系20、对于高斯序列x(n)=exp[-(n-p)2/q],取16点作FFT,其幅度谱中低频分量最多的是21、一般地说按时间抽取基二FFT的_______序列是按位反转重新排列的。
22、信号x(n)=sin(nπ/4) - cos(nπ/7)的数字周期为23、N=2L点基二FFT,共有______列蝶形,每列有____个蝶形。
24、信号s(t)=sin(4000πt)+sin(600πt),则采样频率至少应为25、用按时间抽取法计算256点的FFT时,n=233的二进制位反转值是26、FFT之所以能减少DFT的运算量,是因为:,FFT减少DFT 运算量的基本处理思想是。
数字信号处理_吴镇扬_习题解答

中 训
) 心
k = 2 X ( ); 2
⎧1, 0 ≤ n ≤ 4 x(n) = ⎨ ⎩0,5 ≤ n ≤ 9
⎧1, 0 ≤ n ≤ 4 y ( n) = ⎨ ⎩ −1,5 ≤ n ≤ 9
用作图表示 x ( n ), 解答:
y ( n ) 及 f ( n) = x ( n) ∗ y ( n)
⎧1, 2,3, 4,5,3,1, −1, −3, −5, −4, −3, −2, −1, n = 0,1,..13 f ( n) = ⎨ ⎩0, 其它
数字信号处理习题 第一章 1-4
今对三个正弦信号
xa1 (t ) = cos 2π t , xa 2 (t ) = − cos 6π t , xa 3 (t ) = cos10π t 进行理想采
样,采样频率为 Ω s
= 8π
,求着三个采样输出序列,比较其结果.画出 xa1 (t ), xa 2 (t ), xa 3 (t ) 的波形及采
培 信 通
中 训
−1 −1
,式中 a 为实数
) 心
(3) 通过 z 平面上作图,可以发现,极点 a 在单位圆内的实轴上,零点 1/a 在单位圆外的实轴上, 它们各自到单位圆上任一点的矢量长度可由余弦定理求取,分别为
零点矢量长度= a
+ 1 − 2a -1cos(ω ) =
1 a
a 2 + 1 − 2acos(ω )
解答:
(3) y (n) =
m =−∞
∑ x ( m)
n
(1)T [ax1 (n) + bx2 (n)] = 2[ax1 (n) + bx2 (n)] + 5 = a[2 x1 (n) + 5] + b[2 x2 (n) + 5] − 5a − 5b + 5
数字信号处理课后习题答案(吴镇扬)(精编文档).doc

【最新整理,下载后即可编辑】习题一 (离散信号与系统)1.1周期序列,最小周期长度为5。
1.2 (1) 周期序列,最小周期长度为14。
(2) 周期序列,最小周期长度为56。
1.5()()()()()()()11s a s s s a n s s a s n X j x t p t X j ΩP j Ω2n τn τj sin j Ωjn e X 2n π2n n τj Sa X j jn e 2T 2πττ∞=-∞∞=-∞Ω==*⎡⎤⎣⎦ΩΩ⎛⎫-=-Ω ⎪⎝⎭ΩΩ⎛⎫-=Ω-Ω ⎪⎝⎭∑∑ 1.6 (1) )(ωj e kX (2) )(0ωωj n j e X e (3) )(21)(2122ωωj j e X e X -+ (4) )(2ωj e X1.7 (1) 0n z -(2) 5.0||,5.0111>--z z (3) 5.0||,5.0111<--z z (4)0||,5.01)5.0(11101>----z z z1.8 (1) 0,)11()(211>--=---z zz z z X N(2) a z az az z X >-=--,)1()(211 (3) a z az z a az z X >-+=---,)1()(311211.91.10 (1))1(2)(1----+n u n u n (2))1(24)()5.0(6--⋅--n u n u n n (3))()sin sin cos 1(cos 000n u n n ωωωω++(4) )()()(1n u a a a n a n ---+-δ 1.11(1))(1z c X - (2) )(2z X (3))()1(21z X z -+ (4)-+<<x x R z R z X /1/1),/1(1.12 (1) 1,11<-ab ab(2) 1 (3)00n a n1.13 (1) 该系统不是线性系统;该系统是时不变系统。
数字信号处理(吴镇扬)课后习题答案(比较详细的解答过程)chap5_6
在数字信号处理的滤波器、FFT、卷积及各种矢量 运算中,由于要执行Σb(n)*x(n - k)一类的运算,这类运 算的乘法和加法总是同时出现,因此DSP中就希望将乘法
器和加法器相结合,在一个时钟周期完成一次乘、加运算,
并且累加乘法运算的结果。这样的运算单元称为乘法累加 器(MAC)。
对于乘法累加器,除了要求能在一个时钟周期完成一
5.6-1。
输入设备
运算器
输出设备
控制器
存储器
数据线 控制线
图5.6-1 冯.诺曼结构
冯.诺曼结构处理器具有以下几个特点:
(1) 必须有一个存储器;
(2) 必须有一个控制器;
(3) 必须有一个运算器,用于完成算术
运算和逻辑 运算;
(4) 必须有输入和输出设备,用于进行
人机通信。
冯.诺曼的主要贡献就是提出并实现了“ 存储程序”的概念。由于指令和数据都是二
若干位 。右移使得符号位扩展,也就是在左边填
入符号位,这样可以保留原有的正号或负号。左 移操作用0填入最低位,如果数的最高位不是符号 位,则左移的结果就造成了溢出,这时溢出标志 被置1。逻辑移位用来做某些逻辑操作,如用于位
屏蔽等。逻辑移位把无符号数左移或右移,腾空
位填0。
通用微处理器的移位操作是一位一位移的
生。
5.6.2 DSP硬件构成 典型的DSP处理器中的运算/处理功能单元 主要包括以下几个部分: ● 乘法器/乘加器(MAC) ● 算术逻辑运算单元(ALU) ● 移位器 ● 数据地址发生器(DAG) ● 程序定序器,又称指令定序器 ● 存储器
5.6.2.1 DSP的乘法器/乘加器(MAC) DSP乘法器应具有以下基本功能: 1. 要求在一个时钟周期里对两个字长为 b位的输入由硬件作快速并行乘法; 2. 应能通过格式控制来执行无符号或带 符号或混合的乘法操作、小数或整数乘法操 作以及扩展精度或双精度运算,并有合适的 舍位方法; 3.应有输入和输出寄存器,这样可以锁 存数据,配合流水线操作。也可不用寄存器 ,使乘法器在透明方式下工作,这样可以有 最小的等待时间。
数字信号处理实验(吴镇扬)答案-2
(1) 观察高斯序列的时域和幅频特性,固定信号)(n x a 中参数p=8,改变q 的值,使q 分别等于2、4、8,观察他们的时域和幅频特性,了解当q 取不同值时,对信号序列的时域和幅频特性的影响;固定q=8,改变p,使p 分别等于8、13、14,观察参数p 变化对信号序列的时域和幅频特性的影响,注意p 等于多少时会发生明显的泄漏现象,混叠是否也随之出现?记录实验中观察到的现象,绘出相应的时域序列和幅频特性曲线。
()()⎪⎩⎪⎨⎧≤≤=-其他0150,2n e n x q p n a解:程序见附录程序一:P=8,q 变化时:t/T x a (n )p=8 q=2k X a (k )t/T x a (n )p=8 q=4k X a (k )p=8 q=4t/Tx a (n )p=8 q=8kX a (k )p=8 q=8幅频特性时域特性t/T x a (n )p=8 q=8k X a (k )p=8 q=8t/T x a (n )p=13 q=851015k X a (k )p=13 q=8t/Tx a (n )p=14 q=851015kX a (k )p=14 q=8时域特性幅频特性分析:由高斯序列表达式知n=p 为期对称轴; 当p 取固定值时,时域图都关于n=8对称截取长度为周期的整数倍,没有发生明显的泄漏现象;但存在混叠,当q 由2增加至8过程中,时域图形变化越来越平缓,中间包络越来越大,可能函数周期开始增加,频率降低,渐渐小于fs/2,混叠减弱;当q 值固定不变,p 变化时,时域对称中轴右移,截取的时域长度渐渐地不再是周期的整数倍,开始无法代表一个周期,泄漏现象也来越明显,因而图形越来越偏离真实值,p=14时的泄漏现象最为明显,混叠可能也随之出现;(2) 观察衰减正弦序列 的时域和幅频特性,a=0.1,f=0.0625,检查谱峰出现的位置是否正确,注意频谱的形状,绘出幅频特性曲线,改变f ,使f 分别等于0.4375和0.5625,观察这两种情况下,频谱的形状和谱峰出现的位置,有无混叠和泄漏现象?说明产生现象的原因。
《数字信号处理》课后答案

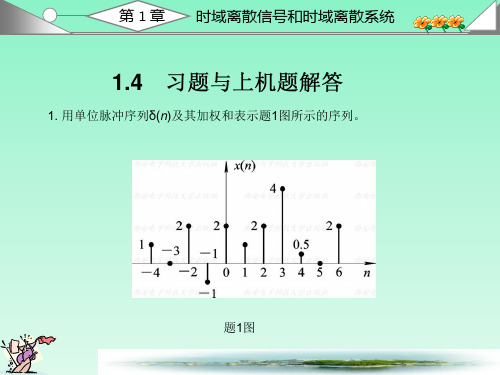
数字信号处理课后答案 1.2 教材第一章习题解答1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。
解:()(4)2(2)(1)2()(1)2(2)4(3)0.5(4)2(6)x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+-2. 给定信号:25,41()6,040,n n x n n +-≤≤-⎧⎪=≤≤⎨⎪⎩其它(1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。
解:(1)x(n)的波形如题2解图(一)所示。
(2)()3(4)(3)(2)3(1)6()6(1)6(2)6(3)6(4)x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+-(3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。
(4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。
(5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。
3. 判断下面的序列是否是周期的,若是周期的,确定其周期。
(1)3()cos()78x n A n ππ=-,A 是常数;(2)1()8()j n x n e π-=。
解:(1)3214,73w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12,168w wππ==,这是无理数,因此是非周期序列。
5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。
南邮数字信号处理吴镇扬-课后习题详细答案-DSP期末复习PPT课件
• 解:
DTxF n T n0 xnn0ejwn
n
令 n ' n n 0 xn ' e jw n ' n 0xn ' e jw ' jn w 0
n '
n '
e jw 0 nxn 'e jw ' n e jw 0 D n T xn ' F e jT w 0X n e jw
•pp 34: 1.5 (3)
1
X Z x n Z n 0 . 5 n u n 1 Z n 0 . 5 n Z n
n
n
n
变 量 n ' n 替 换 0 .5 n 'Z n ' 0 .5 1 Z n '
n ' 1
n ' 1
0
Re[z]
• pp 34: 1.5 (2n Z n0 .5 n u n Z n0 .5 n Z n
n
n
n 0
n 00 .5 Z 1 n 1 0 1 .5 Z 1 ,0 .5 Z 1 1 1 0 1 .5 Z 1 ,0 .5 Z
n ' 1
n ' 1
•变量替换易出问题
1 0 . 0 5 . 5 1 Z 1 Z 1 0 1 . 5 Z 1 ,0 . 5 1 Z 1 1 0 1 . 5 Z 1 ,Z 0 . 5
零点:z
2z 1 2z
0
z
z
1 2
j Im[z]
极点: z 1
收敛域:
2 z
1
2
1/2
DSP考试题型
• 填空题20分(每空1分) • 判断题10分(每题2分) • 简答题10分 • 画图题15分 • 计算题45分