霍夫变换(详解)
hough变换直线检测主要原理

hough变换直线检测主要原理
霍夫变换是一种在图像空间进行几何形状检测的方法,用于检测平面上的直线。
主要原理如下:
1. 点与直线的表示:霍夫变换使用极坐标系来表示直线,每个点在图像中表示一条通过该点的直线。
直线可以用两个参数表示:r表示离原点的距离,θ表示与x轴的夹角。
2. 累加过程:对每个点,遍历所有可能的直线参数,并在霍夫空间中进行累加。
对于每个点,对应于通过该点的所有直线,累加器中相应位置的值加1。
这个累加过程可以在霍夫空间中的一个二维数组中进行。
3. 阈值检测:当累加器中的某个值超过预设的阈值时,认为该直线存在。
这个阈值可以根据应用需求进行设置。
4. 参数反算:根据累加器中的峰值,反算出对应的直线参数(r和θ),并在图像中绘制出检测到的直线。
霍夫变换的主要优点是对于存在噪声和局部遮挡的图像仍然能够有效地检测直线。
但是其缺点是计算复杂度较高,直线的参数空间较大,需要处理大量的累加器。
同时,霍夫变换对于直线的精确定位和参数估计准确性不高,对于曲线的检测效果较差。
霍夫变换(hough transform)
霍夫变换(hough transform)霍夫变换(Hough Transform)霍夫变换是一种图像处理技术,用于在图像中检测直线、圆形等几何形状。
它最早由Paul Hough在1962年提出。
霍夫变换在计算机视觉和模式识别领域得到广泛应用,特别在边缘检测和形状分析中表现出色。
一、霍夫变换原理1. 直线检测霍夫变换的直线检测基于极坐标下的直线方程:ρ = xcosθ + ysinθ。
其中,ρ表示直线与原点的距离,θ为直线与x轴的夹角。
霍夫变换通过在ρ-θ空间中进行投票,找到出现频率最高的ρ和θ组合,即可以确定一条直线。
2. 圆形检测霍夫变换的圆形检测考虑到圆心坐标和半径。
以圆心坐标(xc, yc)和半径r为变量,对每个像素点进行投票。
根据累加器中出现频率最高的圆心和半径组合,即可确定一个圆。
二、霍夫变换的步骤1. 边缘检测霍夫变换需要基于边缘图像进行处理,因此首先需要对原始图像进行边缘检测。
常用的边缘检测算法有Canny边缘检测和Sobel算子等。
2. 构建累加器对于直线检测,构建一个二维累加器数组,用于记录直线参数的出现频率。
对于圆形检测,构建一个三维累加器数组,用于记录圆心和半径的出现频率。
3. 参数空间搜索遍历边缘图像上的每个像素点,对于每个边缘像素,计算对应的ρ和θ(直线检测)或圆心坐标和半径(圆形检测)。
在累加器中相应位置加1。
4. 参数估计根据累加器中出现频率最高的位置,估计出最佳直线或圆形的参数。
可以设定一个阈值,只接受出现频率高于该阈值的参数。
5. 绘制检测结果根据参数估计的结果,在原始图像上绘制检测出的直线或圆形。
三、霍夫变换的应用1. 直线检测霍夫变换的直线检测广泛应用于计算机视觉领域。
例如,道路标线检测、物体边缘检测、图像中的几何形状检测等。
通过直线检测,可以提取出图像中的重要几何特征,为后续的图像处理和分析提供基础。
2. 圆形检测霍夫变换的圆形检测可以应用于许多领域,例如医学图像处理、目标跟踪、光学字符识别等。
霍夫变换线段检测原理
霍夫变换(Hough Transform)是图像处理中的一种特征提取技术,它通过一种投票算法检测具有特定形状的物体。
对于线段检测,霍夫变换的基本原理是将原始的二维图像空间转换为参数空间,然后通过在参数空间中进行投票来检测线段。
具体来说,对于直线检测,我们可以使用霍夫变换将原始的笛卡尔坐标系中的点转换为极坐标系中的参数(r,θ),其中r表示原点到直线的垂直距离,θ表示直线与x轴的夹角。
然后,我们可以通过在参数空间中进行投票来检测直线。
具体步骤如下:
边缘检测:首先对原始图像进行边缘检测,提取出图像中的边缘像素点。
参数空间转换:将边缘像素点从原始的二维图像空间转换到参数空间,即极坐标系中的(r,θ)参数。
投票过程:在参数空间中为每个边缘像素点进行投票。
投票的方式可以是累加器数组的形式,其中每个元素对应一个可能的参数值(r,θ)。
当一个边缘像素点转换到参数空间后,就在对应的累加器数组元素上加一。
阈值处理:设置一个阈值,当累加器数组中的某个元素的值超过阈值时,就认为该直线存在。
直线拟合:对于检测到的直线,可以使用最小二乘法等拟合算法来拟合直线方程。
通过以上步骤,就可以使用霍夫变换检测图像中的线段了。
该方法可以有效地排除噪声和其他非线段物体的干扰,准确提取出图像中的线段。
霍夫变换(hough transform)
一、概述霍夫变换是一种常用的图像处理技术,它可以用于检测图像中的直线、圆或者其他形状。
它具有很好的鲁棒性,可以应对图像中存在的噪声和其他干扰。
霍夫变换在计算机视觉、图像处理和模式识别领域有着广泛的应用,成为了处理图像中几何形状的重要工具。
二、霍夫变换的原理霍夫变换最初是由美国科学家保罗·霍夫在1962年提出的,用于检测图像中的直线。
后来,霍夫变换被扩展到检测圆或者其他形状。
霍夫变换的基本原理是将空间域中的坐标转换到参数域中,在参数域中对应的曲线经过的点在空间域中具有共线的特点。
通过累加空间域中的点的参数,可以找到曲线或者形状的参数方程,从而实现对图像中形状的检测。
具体来说,对于检测直线来说,可以通过霍夫变换将直线表示为参数空间中的斜率和截距,从而可以在参数空间中进行累加,最终找到直线的参数方程。
三、霍夫变换在直线检测中的应用1. 边缘检测在使用霍夫变换检测直线之前,通常需要对图像进行边缘检测。
边缘检测可以帮助找到图像中明显的过渡区域,这些过渡区域通常对应着直线的轮廓。
常用的边缘检测算法包括Sobel算子、Canny算子等。
2. 参数空间的设置为了使用霍夫变换来检测直线,需要设定参数空间的范围。
对于直线检测来说,一般可以设定直线的斜率和截距的取值范围。
3. 累加过程在设定好参数空间后,需要对图像中的边缘点进行霍夫变换的累加过程。
对于每一个边缘点,都可以在参数空间中找到对应的直线,通过对参数空间的累加,可以找到参数空间中的峰值,这些峰值对应着图像中的直线。
4. 直线检测可以根据参数空间中的峰值来确定图像中的直线。
通常可以设定一个阈值来筛选参数空间中的峰值,从而得到最终的直线检测结果。
四、霍夫变换在圆检测中的应用除了直线检测,霍夫变换也可以用于检测图像中的圆。
与直线检测类似,圆检测也需要进行边缘检测和参数空间的设定。
不同的是,在圆检测中,需要设定圆心和半径的参数空间范围。
五、霍夫变换的改进和应用1. 累加数组的优化在传统的霍夫变换中,需要对参数空间进行离散化,这会导致计算量较大。
利用霍夫变换 提取直角-概述说明以及解释
利用霍夫变换提取直角-概述说明以及解释1.引言1.1 概述霍夫变换是一种常用的图像处理技术,通过数学方法寻找图像中的直线和直角。
本文将介绍如何利用霍夫变换提取直角的方法和优势。
在图像处理领域,直角是一种常见的几何形状,具有明显的特征,因此提取直角对于图像分析和识别具有重要意义。
传统的方法往往需要通过复杂的图像处理算法和人工标注来提取直角,效率低下且易受噪声干扰。
而霍夫变换通过对图像中的直线进行检测和拟合,可以高效地提取直角。
其原理是将直线表示为极坐标形式,通过在参数空间中累加直线的交点,可以找到直角的位置。
并且,霍夫变换具有较强的抗噪能力,可以有效地处理复杂的图像情况。
本文将详细介绍霍夫变换的原理、在直角提取中的应用以及提取直角的优势,希望读者能对利用霍夫变换提取直角有一个深入的了解。
1.2 文章结构文章结构部分将会介绍整篇文章的章节安排和主要内容,为读者提供一个清晰的概览。
具体包括以下内容:文章结构本文将主要分为三个部分:引言、正文和结论。
在引言中将概述霍夫变换的概念和本文的目的,引导读者了解本文的重点。
正文部分将详细介绍霍夫变换的原理,以及在直角提取中的应用和优势。
最后,在结论部分将对整篇文章进行总结,展望未来可能的发展方向,并提出结论。
通过这样的结构安排,读者可以清晰地了解本文的内容框架,有助于他们更好地理解论点和论证。
1.3 目的:本文的目的是介绍利用霍夫变换提取直角的方法。
通过深入理解霍夫变换的原理和应用,我们可以更好地理解如何利用这一技术来检测图像中的直角结构。
同时,我们还将探讨霍夫变换在直角提取中的优势,以及未来可能的发展方向。
通过本文的阐述,读者将能够更加全面地了解霍夫变换在图像处理中的重要性,以及其在直角检测中的实际应用价值。
2.正文2.1 霍夫变换的原理霍夫变换是一种数学方法,用于在图像或空间中检测具有特定形状或模式的物体。
它最初是由保罗·霍夫于1962年提出的,用于在图像中检测直线。
霍夫变换(详解)
基本原理
霍夫变换利用点和线之间的对偶性,将 图像空间中直线上离散的 像素点 通过参数方 程映射为霍夫空间中的 曲线 ,并将霍夫空间 中多条曲线的 交点 作为直线方程的参数 映射 为图像空间中的 直线。 给定直线的参数方程,可以利用霍夫变 换来检测图像中的直线。
原图
二值化
canny边缘检测
霍夫变换直线检测
谢谢!
给定具体的五个点:
(a)image space
(b)hough space
选择由尽可能多直线汇成的点,如A和B。
y=x-1 y=1 (a)image space (b)hough translation
A,B确定了两组参数(k,q),代入直线方程y=kx+q,况,
q q=-2k+4 q=-2k+3 q=-2k+1
(a)Image space q = -xk+y 无法确定图像空间中的垂线。
(b) hough space
k
转化为极坐标下的参数方程:
x1cosθ+y1sinθ=ρ
x1cosθ=ρcos2θ y1sinθ=ρsin2θ
图像空间中的点,对应了霍夫空间中的曲线。 曲线的交点确定了一组参数,能够描述图像空间中的特定直线。
给定具体的三个点:
y=x-1
(1,-1) (a)image space 图像空间中共线的点, 在霍夫空间对应的直线相交于一点。 (b)hough space
点和线的对偶性
(1)图像空间中的点,对应霍夫空间中的直 线。 (2)图像中的直线,对应霍夫空间中的点。 (3)共点的直线,在霍夫空间中对应的点在 一条直线上。 (4)共线的点,在霍夫空间中对应的直线交 与一点。
《霍夫变换Hough》课件

未来发展方向
随着计算机算力的提升, 人工智能技术的发展,霍 夫变换Hough将在更多领 域得到变换[M]. 阳泉: 山西科技师范学院学报, 2009. • Duda R O, Hart P E. Use of the Hough transformation to detect lines and curves in
for circles[J]. IEEE Transactions on Image Processing, 2014, 23(12): 5338-5347.
pictures[J]. Communications of the ACM, 1972, 15(1): 11-15. • Zhu J, Ji X, Zhang Y, et al. A computationally efficient approach to the Hough transform
霍夫变换可用于许多领域,例如检测道路标线、检测医学影像中的对象、自然场景分析 等。
3 霍夫变换Hough的优点和缺点
霍夫变换具有鲁棒性好、适用范围广等优点,但是计算量较大、可能存在误检、漏检等 缺点。
霍夫变换Hough的原理
什么是霍夫空间?
霍夫空间是一种由极坐标系 建立起来的坐标系,它是描 述一条直线或圆的数学形式。
如何检测图像中的直线?利用霍夫变换进行直线检测,步骤包括边缘检测、霍夫 空间生成、投票计算和参数选取。
2
霍夫圆变换
如何检测图像中的圆?利用霍夫变换进行圆检测,步骤包括边缘检测、霍夫空间 生成、投票计算和参数选取。
案例分析
直线检测案例
圆检测案例
案例描述:利用霍夫变换检测道路标线。实现步 骤:边缘检测、霍夫空间生成、投票计算和参数 选取。实现结果展示:检测出图像中的道路标线。
图像处理中的霍夫变换算法

图像处理中的霍夫变换算法霍夫变换算法是一种基于数学理论的图像处理方法,用于检测图像中的直线、圆和其他形状。
它广泛应用于计算机视觉、机器人和自然语言处理等领域。
在本文中,我们将探讨霍夫变换算法及其在图像处理中的应用。
一、霍夫变换的原理霍夫变换是一种图像处理技术,用于检测图像中的直线和圆。
它可以将图像中的点转换成一系列参数空间中的曲线。
对于每个曲线,计算它在参数空间中的过程称为霍夫变换。
在霍夫变换中,直线和圆的参数被表示为二元组 $(a, b)$ 或三元组 $(x_{o}, y_{o}, r)$。
对于直线 $(x, y)$,其参数空间可以表示为 $(a, b)$,其中 $a$ 是经过 $(x, y)$ 的斜率,$b$ 是截距。
对于圆$(x, y)$,其参数空间可以表示为 $(x_{o}, y_{o}, r)$,其中$(x_{o}, y_{o})$ 是圆心的坐标,$r$ 是半径。
在进行霍夫变换时,需要建立一个二维数组,用于记录每个参数 $(a, b)$ 或 $(x_{o}, y_{o}, r)$ 对应的曲线通过的点数。
对于每个点,计算其对应的参数,并在相应的数组元素中增加计数器。
最后,遍历整个参数空间的数组,找出计数器最大的元素,该元素对应的曲线即为图像中检测到的直线或圆。
二、霍夫变换的优点和缺点霍夫变换算法在图像处理领域中有以下优点:1. 对图像噪声不敏感:霍夫变换算法能够在噪声存在的情况下进行图像处理,而且处理后的结果不会受到噪声的影响。
2. 能够检测多条直线:霍夫变换算法能够检测到图像中的多条直线,而且没有数量限制。
3. 能够检测特殊形状:霍夫变换算法能够检测到图像中的特殊形状,如圆、椭圆、曲线等。
但霍夫变换算法也有一些缺点:1. 计算复杂度高:由于需要遍历整个参数空间的数组,霍夫变换算法的计算复杂度较高。
2. 跟分辨率有关:霍夫变换算法需要适当地选择参数空间的分辨率,否则对于某些参数可能会漏检或误检。
霍夫变换提取任何形状的线条 -回复
霍夫变换提取任何形状的线条-回复静态图像处理中,线条的提取是非常重要的任务之一。
而霍夫变换是一种经典的图像处理技术,它可以有效地提取任何形状的线条。
本文将逐步介绍霍夫变换的原理和实现步骤,帮助读者理解和运用这一强大的线条提取方法。
一、霍夫变换的原理霍夫变换是一种通过直方图投影的方法来识别图像中的特定形状的技术。
在线条提取中,我们可以利用霍夫变换来检测直线的存在及其参数。
霍夫变换的主要思想是将二维图像空间转换为参数空间,通过在参数空间中的投票来检测直线。
具体来说,霍夫变换首先定义了一个参数空间,该空间由直线在图像中的两个参数组成,分别是极坐标中的r(极径)和θ(极角)。
然后,对于图像中的每个像素,对应的r和θ的所有可能取值进行投票。
如果一组(r, θ)的投票超过设定的阈值,那么这组(r, θ)对应的直线就被检测出来。
二、霍夫变换的步骤下面我们将详细介绍如何使用霍夫变换来提取任何形状的线条。
1. 边缘检测首先,我们需要对图像进行边缘检测,以便从原始图像中提取线条的形状。
常用的边缘检测算法有Sobel、Canny等。
通过应用这些算法,我们可以得到一张只包含边缘信息的二值图像。
2. 构建霍夫空间在霍夫变换中,我们使用二维参数空间(r, θ)来表示直线的形状。
为了构建霍夫空间,我们需要提前设定r和θ的取值范围和精度。
例如,我们可以将r取值范围设定为图像对角线的长度,将θ取值范围设定为0到180。
然后,根据设定的取值范围和精度,创建一个二维空间,用于记录参数(r, θ)对应的投票数。
3. 执行霍夫变换通过遍历二值图像的所有边缘点,对每个边缘点进行一次投票。
对于每个边缘点,计算其到二维参数空间中所有(r, θ)的距离,并在对应的(r, θ)位置的投票数加1。
4. 设置阈值根据实际需求,设置一个阈值,用于判断一个(r, θ)对应的直线是否存在。
如果投票数超过阈值,我们认为这个(r, θ)对应的直线是有效的,即图像中存在一条与之对应的直线。
Hough变换原理解析

一、霍夫变换的基本原理1.1图像空间到参数空间的转换对于图像中共线的点集{(x0,y0), (x1,y1), ...}都经过直线y=kx+b,先在我们换一个说法,“斜率为k,截距为b的直线y=kx+b包含了所有在该直线上的点”。
一种强调的是图像中的点集,另一种强调的是直线的参数k和b,通过直线的点集去描述这条直线明显没有直接通过k,b两个参数去描述那样直接方便。
而Hough变换就是将我们“点共线”的思维转化到参数空间{k,b}进行描述,图像空间中所有经过y=kx+b的点经过Hough变换后在参数空间都会相交于点(k,b),这样,通过Hough变换,就可以将图像空间中直线的检测转化为参数空间中对点的检测。
我们不妨将y=kx+b进行一下变形:这就是Hough变换将图像空间坐标(x,y)转化为参数空间(k,b)的Hough变换式。
Hough变换的步骤(执行过程):1.在参数空间中建立一个二维(分别对应k,b)计数器,实际就是二维数组kbcnt,k维度为图像中直线斜率可能范围,b维度为图像中截距可能范围;数组中所有值都初始化为0;2.扫描图像空间中的所有点(xi,yi),Hough变换式进行图像空间到参数空间的变换(ki,bi),计数kbcnt(ki,bi)++3.设定阈值thr(图像中有多少个点共线才认为存在直线),kbcnt(ki,bi)>thr的ki,bi组成图像中的直线y=ki*x+bi然而,上面的检测直线的方案貌似还有些问题:如果图像中存在竖直的直线呢,那kbcnt的k维度岂不是要无穷大!因此,才有了另一种参数空间的方案:利用极坐标参数而非“斜率-截距式”描述直线。
极坐标中的直线表示极坐标中的直线方程为将其改写成Hough变换式,即自变量(x,y)到参数变量(r,theta)的映射:使用极坐标参数空间,Hough变换的步骤不变,只不过将kbcnt替换成rthcnt,r范围是图像对角线的长度,th范围是0~2*pi。
霍夫变换——精选推荐

霍夫变换⼀霍夫直线变换1 点斜式直线⽅程可表⽰为:y = kx + b,当k, b确定时,在xy平⾯上确定⼀条唯⼀直线;考虑同样的变形 b = -xk + y,当x, y确定时,可以看做在kb 平⾯上确定的⼀条唯⼀直线;若x, y表⽰xy平⾯上⼀个已知坐标点,则经过该坐标点(x, y)可形成多条直线,其表达式为:b = -xk + y。
考虑在平⾯图像上存在⼀条有效直线段,遍历图像上每⼀个点,并计算出每个点可能形成的直线参数;发现某个特定参数(k, b)出现次数最多,这个特定参数应该为图像上有效直线段的参数(k, b)。
通过以上观察,可以将参数(k, b)离散化,然后遍历平⾯图像上的每⼀个点,累加可能形成直线(k, b)参数;当遍历完整个图像后,在累加器(k, b)中会产⽣⼀个全局最⼤值,该值为平⾯图像上有效直线的参数(k, b)。
当平⾯图像上存在多条有效直线段时,在累加器(k, b)中会产⽣多个局部极⼤值,可以通过设定合理的阈值以检测出平⾯图像上的多条直线段。
2 极坐标使⽤点斜式检测直线存在两个问题:1)y = kx + b ⽆法表达平⾏于y轴的直线段(k为⽆穷⼤);2)k, b取值都趋近于⽆穷⼤,离散化(k, b)后参数空间趋近⽆穷⼤,计算机存储空间有限;通过坐标转换,将直⾓坐标转换为极坐标可以解决以上问题。
根据图形可得:ab = 0 (向量a与向量b正交)=>,其中(x, y)为直线L上的任意点;=>,其中(x, y)为直线L上的任意点;考虑在平⾯图像上存在⼀条有效直线段,离散化参数,然后遍历平⾯图像上每⼀个点,累加可能形成的直线参数;类似的,在平⾯上会产⽣⼀个全局最⼤值,该值即为平⾯图像上的有效直线参数;同理,针对平⾯图像上存在多条有效直线段情况,可以通过局部极⼤值检测多条有效直线段。
⼆霍夫圆变换圆的⽅程式可表达为:,参数确定⼀个圆;离散化参数,遍历平⾯图像上每⼀个点,累加可能形成的圆参数,在参数空间中寻找全局最⼤值或局部极⼤值以检测有效圆;圆的⽅程也可表达为:,,参数确定⼀个圆;固定,遍历平⾯图像上每⼀个点,根据公式,累加参数空间,在参数空间寻找全局最⼤值或局部极⼤值以检测半径为的有效圆;多次遍历平⾯图像,并选择不同的半径可以检测平⾯图像上任意半径的圆。
霍夫变换返回的线条距离从小到大排序

霍夫变换返回的线条距离从小到大排序霍夫变换(Hough Transform)是一种常用的图像处理技术,用于在图像中检测直线、圆和其他形状。
它可以帮助我们提取出图像中的线条,并通过返回线条对应的距离值来排序。
在本文中,我们将探讨霍夫变换返回的线条距离从小到大排序的原理、应用和意义。
1. 霍夫变换的基本原理霍夫变换是由Paul Hough于1962年提出的,它的基本思想是将图像空间的直线参数空间化,从而将直线检测问题转化为参数空间中的峰值检测问题。
在霍夫变换中,参数空间被分成若干个离散的元胞(cells),每个元胞代表一个直线参数(如斜率和截距)。
然后对于图像中的每个边缘点,在参数空间的相应位置上累加计数。
通过寻找参数空间中的峰值,即累加计数最大的元胞,来检测出图像中的直线。
返回的线条距离是霍夫变换结果中的一个重要信息。
它表示检测到的直线到图像原点(或其他参考点)的距离。
返回的线条距离值从小到大排序,可以用于确定检测到的直线在图像中的位置和大小。
2. 霍夫变换的应用霍夫变换在图像处理中有着广泛的应用。
主要包括以下几个方面:- 直线检测:通过霍夫变换可以快速准确地检测图像中的直线。
在计算机视觉和模式识别领域中,直线检测是一项基础任务,常用于目标检测、边缘检测和几何变换等问题。
- 圆检测:除了直线,霍夫变换还可以检测图像中的圆。
通过对参数空间的扩展,可以实现对圆的检测和拟合,从而在图像中定位和描述圆的位置、半径和弧度。
- 形状识别:霍夫变换的思想也可以应用于其他形状的检测和识别。
通过对参数空间的离散化和累加,可以实现对其他几何形状(如矩形、椭圆、多边形)的检测和描述。
霍夫变换的应用不仅局限于图像处理领域,还具有广泛的应用前景。
在自动驾驶、机器人导航和物体识别等领域,霍夫变换可以帮助机器实现对环境中静态和动态物体的感知和理解。
3. 线条距离的排序意义霍夫变换返回的线条距离从小到大排序,具有以下几个意义:- 定位线条位置:线条距离的排序可以帮助我们确定检测到的直线在图像中的位置。
霍夫变换, 正弦曲线 检测

霍夫变换(Hough Transform)是一种在图像处理中用于检测形状的技术。
它被广泛应用于边缘检测、线条检测和圆检测等领域。
在正弦曲线检测中,霍夫变换可以用来检测图像中的正弦曲线。
基本原理:
霍夫变换的基本原理是将原始图像空间中的形状转换为参数空间中的累加器,通过找到累加器峰值的位置来确定形状的参数。
对于正弦曲线检测,我们可以将正弦曲线的振幅、周期和相位作为参数,使用霍夫变换来检测图像中的正弦曲线。
实现步骤:
1.边缘检测:首先需要对图像进行边缘检测,提取出图像中的边缘像素点。
常用的边缘检测算法包括Sobel、Canny等。
2.参数空间转换:将边缘像素点的坐标转换为参数空间中的形式。
对于正弦曲线,可以将振幅、周期和相位作为参数,将边缘像素点的坐标转换为这些参数的形式。
3.累加器计算:在参数空间中,对于每个可能的参数组合,计算累加器的值。
累加器的值可以通过投票的方式计算,即将相同参数组合的边缘像素点计数加一。
4.峰值检测:在累加器中寻找峰值,峰值的位置对应于正弦曲线
的参数。
通过峰值的位置可以确定正弦曲线的参数,从而检测出正弦曲线。
应用场景:
霍夫变换在图像处理中有着广泛的应用,例如在医学图像处理中用于检测心电图信号、在机器视觉中用于检测物体轮廓和线条等。
在正弦曲线检测中,霍夫变换可以用于检测图像中的振动信号、波形等,具有重要的实际意义和应用价值。
霍夫变换
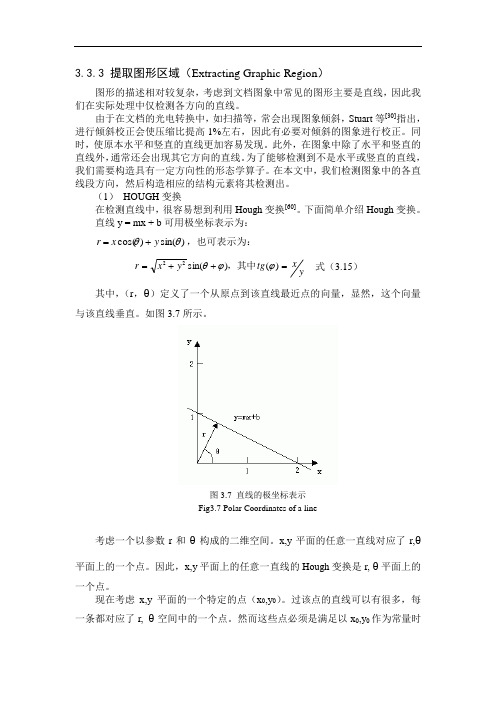
3.3.3 提取图形区域(Extracting Graphic Region )图形的描述相对较复杂,考虑到文档图象中常见的图形主要是直线,因此我们在实际处理中仅检测各方向的直线。
由于在文档的光电转换中,如扫描等,常会出现图象倾斜,Stuart 等[30]指出,进行倾斜校正会使压缩比提高1%左右,因此有必要对倾斜的图象进行校正。
同时,使原本水平和竖直的直线更加容易发现。
此外,在图象中除了水平和竖直的直线外,通常还会出现其它方向的直线。
为了能够检测到不是水平或竖直的直线,我们需要构造具有一定方向性的形态学算子。
在本文中,我们检测图象中的各直线段方向,然后构造相应的结构元素将其检测出。
(1) HOUGH 变换 在检测直线中,很容易想到利用Hough 变换[60]。
下面简单介绍Hough 变换。
直线y = mx + b 可用极坐标表示为:)sin()cos(θθy x r +=,也可表示为:yxtg y x r =++=)()sin(22ϕϕθ,其中 式(3.15)其中,(r ,θ)定义了一个从原点到该直线最近点的向量,显然,这个向量与该直线垂直。
如图3.7所示。
图3.7 直线的极坐标表示 Fig3.7 Polar Coordinates of a line考虑一个以参数r 和θ构成的二维空间。
x,y 平面的任意一直线对应了r,θ平面上的一个点。
因此,x,y 平面上的任意一直线的Hough 变换是r, θ平面上的一个点。
现在考虑x,y 平面的一个特定的点(x 0,y 0)。
过该点的直线可以有很多,每一条都对应了r, θ空间中的一个点。
然而这些点必须是满足以x 0,y 0作为常量时的等式。
因此在参数空间中与x,y空间中所有这些直线对应的点的轨迹是一条正弦型曲线,即x,y平面上的任一点对应了r,θ平面上的一条正弦曲线。
式(3.15)也说明其正弦的函数关系。
如果有一组位于由参数r0和θ0决定的直线上的边缘点,则每个边缘点对应了r,θ空间的一条正弦型曲线。
霍夫变换的原理

霍夫变换的原理概述霍夫变换(Hough Transform)是一种图像处理中常用的算法,主要用于在图像中检测几何形状的存在以及对其进行分割和参数估计。
它是由霍夫于1962年提出的,通过一系列数学变换来将图像中的直线或者圆等曲线进行检测和提取。
霍夫变换的基本原理霍夫变换的基本原理是将空间坐标的点转换到参数空间中的曲线,通过对曲线在参数空间内的交点进行统计,就可以检测出图像中的特定形状。
主要包括以下几个步骤:1.边缘检测:首先对图像进行边缘检测,将图像中的边缘提取出来。
这可以使用Canny算子等边缘检测算法来实现。
2.构建霍夫空间:对于图像中的每个边缘点,在参数空间内生成曲线。
对于直线检测而言,曲线可以用参数表示:极坐标方程 r = x * cos(theta) + y* sin(theta),其中 (x, y) 是边缘点的坐标,(r, theta) 是参数空间中的点。
3.统计霍夫空间:对霍夫空间内的曲线进行统计,找到交点最多的曲线,它们所代表的直线或者圆形状就是图像中的目标。
通过统计算法,可以找到这些曲线在霍夫空间内的峰值。
4.参数估计:根据霍夫空间内的统计结果,可以得到目标的参数估计。
对于直线检测而言,可以得到直线的斜率和截距;对于圆的检测而言,可以得到圆心的坐标和半径。
霍夫变换的应用领域霍夫变换广泛应用于图像处理和计算机视觉的领域,主要包括以下几个方面:直线检测霍夫变换可以用于检测图像中的直线。
由于直线的数学表示存在一定的困难,直接从图像中提取直线是比较复杂的。
通过将直线的参数转换到霍夫空间内,就可以通过统计算法来检测图像中的直线。
圆检测霍夫变换也可以用于检测图像中的圆。
与直线检测类似,将圆的参数转换到霍夫空间内,通过统计算法找到霍夫空间内的峰值,就可以检测出图像中的圆。
图像分割在图像分割中,霍夫变换可以用于将图像中的目标对象与背景进行分离。
通过检测目标对象所对应的曲线,在霍夫空间内找到峰值,就可以划分出目标对象的区域。
霍夫变换——精选推荐
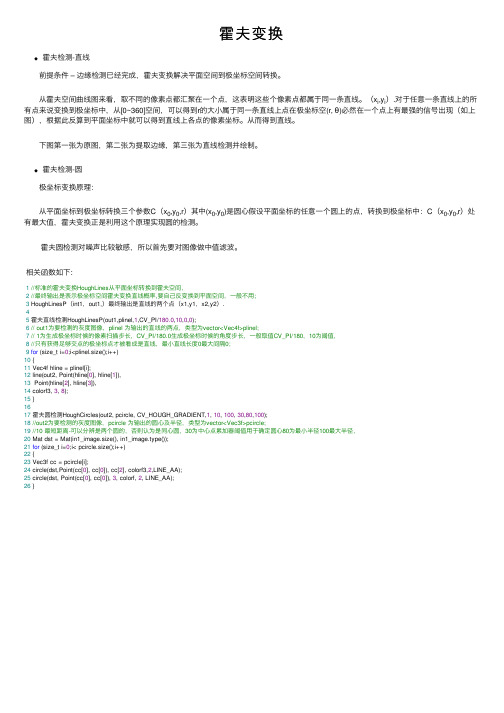
霍夫变换霍夫检测-直线 前提条件 – 边缘检测已经完成,霍夫变换解决平⾯空间到极坐标空间转换。
从霍夫空间曲线图来看,取不同的像素点都汇聚在⼀个点,这表明这些个像素点都属于同⼀条直线。
(x i,y i).对于任意⼀条直线上的所有点来说变换到极坐标中,从[0~360]空间,可以得到r的⼤⼩属于同⼀条直线上点在极坐标空(r, θ)必然在⼀个点上有最强的信号出现(如上图),根据此反算到平⾯坐标中就可以得到直线上各点的像素坐标。
从⽽得到直线。
下图第⼀张为原图,第⼆张为提取边缘,第三张为直线检测并绘制。
霍夫检测-圆 极坐标变换原理: 从平⾯坐标到极坐标转换三个参数C(x0,y0,r)其中(x0,y0)是圆⼼假设平⾯坐标的任意⼀个圆上的点,转换到极坐标中:C(x0,y0,r)处有最⼤值,霍夫变换正是利⽤这个原理实现圆的检测。
霍夫圆检测对噪声⽐较敏感,所以⾸先要对图像做中值滤波。
相关函数如下:1//标准的霍夫变换HoughLines从平⾯坐标转换到霍夫空间,2//最终输出是表⽰极坐标空间霍夫变换直线概率,要⾃⼰反变换到平⾯空间,⼀般不⽤;3 HoughLinesP(int1,out1,)最终输出是直线的两个点(x1,y1,x2,y2).45霍夫直线检测HoughLinesP(out1,plinel,1,CV_PI/180.0,10,0,0);6// out1为要检测的灰度图像,plinel 为输出的直线的两点,类型为vector<Vec4f>plinel;7// 1为⽣成极坐标时候的像素扫描步长,CV_PI/180.0⽣成极坐标时候的⾓度步长,⼀般取值CV_PI/180,10为阈值,8//只有获得⾜够交点的极坐标点才被看成是直线,最⼩直线长度0最⼤间隔0;9for (size_t i=0;i<plinel.size();i++)10 {11 Vec4f hline = plinel[i];12 line(out2, Point(hline[0], hline[1]),13 Point(hline[2], hline[3]),14 colorf3, 3, 8);15 }1617霍夫圆检测HoughCircles(out2, pcircle, CV_HOUGH_GRADIENT,1, 10, 100, 30,80,100);18//out2为要检测的灰度图像,pcircle 为输出的圆⼼及半径,类型为vector<Vec3f>pcircle;19//10 最短距离-可以分辨是两个圆的,否则认为是同⼼圆,30为中⼼点累加器阈值⽤于确定圆⼼80为最⼩半径100最⼤半径,20 Mat dst = Mat(in1_image.size(), in1_image.type());21for (size_t i=0;i< pcircle.size();i++)22 {23 Vec3f cc = pcircle[i];24 circle(dst,Point(cc[0], cc[0]), cc[2], colorf3,2,LINE_AA);25 circle(dst, Point(cc[0], cc[0]), 3, colorf, 2, LINE_AA);26 }。
霍夫变换(Hough)
霍夫变换(Hough)⼀、霍夫变换(Hough) A-基本原理⼀条直线可由两个点A=(X1,Y1)和B=(X2,Y2)确定(笛卡尔坐标)另⼀⽅⾯,也可以写成关于(k,q)的函数表达式(霍夫空间):对应的变换可以通过图形直观表⽰:变换后的空间成为霍夫空间。
即:笛卡尔坐标系中⼀条直线,对应霍夫空间的⼀个点。
反过来同样成⽴(霍夫空间的⼀条直线,对应笛卡尔坐标系的⼀个点):再来看看A、B两个点,对应霍夫空间的情形:⼀步步来,再看⼀下三个点共线的情况:可以看出如果笛卡尔坐标系的点共线,这些点在霍夫空间对应的直线交于⼀点:这也是必然,共线只有⼀种取值可能。
如果不⽌⼀条直线呢?再看看多个点的情况(有两条直线):其实(3,2)与(4,1)也可以组成直线,只不过它有两个点确定,⽽图中A、B两点是由三条直线汇成,这也是霍夫变换的后处理的基本⽅式:选择由尽可能多直线汇成的点。
看看,霍夫空间:选择由三条交汇直线确定的点(中间图),对应的笛卡尔坐标系的直线(右图)。
到这⾥问题似乎解决了,已经完成了霍夫变换的求解,但是如果像下图这种情况呢?k=∞是不⽅便表⽰的,⽽且q怎么取值呢,这样不是办法。
因此考虑将笛卡尔坐标系换为:极坐标表⽰。
在极坐标系下,其实是⼀样的:极坐标的点→霍夫空间的直线,只不过霍夫空间不再是[k,q]的参数,⽽是的参数,给出对⽐图:是不是就⼀⽬了然了?给出霍夫变换的算法步骤:对应code:1 function [ Hough, theta_range, rho_range ] = naiveHough(I)2 %NAIVEHOUGH Peforms the Hough transform in a straightforward way.3 %4 [rows, cols] = size(I);56 theta_maximum = 90;7 rho_maximum = floor(sqrt(rows^2 + cols^2)) - 1;8 theta_range = -theta_maximum:theta_maximum - 1;9 rho_range = -rho_maximum:rho_maximum;1011 Hough = zeros(length(rho_range), length(theta_range));12for row = 1:rows13for col = 1:cols14if I(row, col) > 0 %only find: pixel > 015 x = col - 1;16 y = row - 1;17for theta = theta_range18 rho = round((x * cosd(theta)) + (y * sind(theta))); %approximate19 rho_index = rho + rho_maximum + 1;20 theta_index = theta + theta_maximum + 1;21 Hough(rho_index, theta_index) = Hough(rho_index, theta_index) + 1;22 end23 end24 end25 end其实本质上就是:交点怎么求解呢?细化成坐标形式,取整后将交点对应的坐标进⾏累加,最后找到数值最⼤的点就是求解的,也就求解出了直线。
霍夫变换公式

霍夫变换公式霍夫变换公式在计算机图像处理领域中,霍夫变换是一种经典的算法。
霍夫变换的核心思想是将一张图像中的像素点转换为参数空间,从而进行目标检测和特征提取等操作。
而霍夫变换公式是实现这一算法的基本数学公式,被广泛应用于计算机视觉、图形识别、自动导航、机器人感知等领域。
1. 原理霍夫变换的原理其实非常简单,就是将直角坐标系中的点转换为极坐标系中的一条直线。
而霍夫变换公式就是将一个二维平面上的点(x,y)转换成极坐标系下的一条直线。
在霍夫变换过程中,需要对每一条直线在极坐标系下的范围进行一定的限定,从而排除掉一些噪声点。
限定操作可以通过设定θ和r的取值范围来实现。
2. 分类霍夫变换公式可以按照不同的应用场合来分为多种类型,常见的有标准霍夫变换公式和累计霍夫变换公式两种。
(1) 标准霍夫变换公式标准霍夫变换公式是一种最基本的霍夫变换公式,它的主要思想是将直线方程从点斜式(y-y0)=k(x-x0)转换成极坐标式r=xcosθ+ysinθ,然后计算每一个直线在极坐标系下的参数值。
标准霍夫变换算法的优点是计算速度快,但是缺点是需要对θ和r的取值范围进行一定的限定,从而可能会影响结果的准确性。
(2) 累计霍夫变换公式累计霍夫变换公式是在标准霍夫变换公式的基础上发展起来的一种算法。
它的主要思想是将一条直线的不同参数值进行累加,然后在参数空间中找到累加值最高的点,从而得到直线在图像中的位置和方向。
累计霍夫变换算法的优点是结果更加准确,缺点是计算量比标准霍夫变换公式大。
3. 应用霍夫变换公式在计算机视觉领域中被广泛应用,包括目标检测、特征提取、边缘检测、图形识别等方面。
其中,霍夫变换在检测图像中的直线和圆形上有广泛的应用。
在机器人技术领域,霍夫变换可以用来实现自主导航和避障等功能。
此外,霍夫变换也被广泛应用于医疗图像处理领域,如X射线图像和MRI图像等方面。
综上所述,霍夫变换公式是计算机图像处理领域中一种非常重要的数学算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
给定具体的五个点:
(a)image space
(b)hough space
选择由尽可能多直线汇成的点,如A和B。
y=x-1 y=1 (a)image space (b)hough translation
A,B确定了两组参数(k,q),代入直线方程y=kx+q, 可以描述图像空间中对应的直线。
特殊情况,
hough translation 霍夫变换检测直线
基本原理
霍夫变换利用点和线之间的对偶性,将 图像空间中直线上离散的 像素点 通过参数方 程映射为霍夫空间中的 曲线 ,并将霍夫空间 中多条曲线的 交点 作为直线方程的参数 映射 为图像空间中的 直线。 给定直线的参数方程,可以利用霍夫变 换来检测图像中的直线。
原图
二值化
canny边缘检测
霍夫变换直线检测
谢谢!
给定具体的三个点:
y=x-1
(1,-1) (a)image space 图像空间中共线的点, 在霍夫空间对应的直线相交于一点。 (b)hough space
点和线的对偶性
(1)图像空间中的点,对应霍夫空间中的直 线。 (2)图像中的直线,对应霍夫空间中的点。 (3)共点的直线,在霍夫空间中对应的点在 一条直线上。 (4)共线的点,在霍夫空间中对应的直线交 与一点。
(b)hough space
过同一点的直线,在霍夫空间中所对应的点在一条直线上。
两个点的情况:
y=kx+q
(k,q)
(a)image space 霍夫空间中的交点,确定了一组参数(k,q) 。 将(k,q)代入直线方程 y=kx+q , 可以描述图像空间中过A,B两点的直线。
(b)hough space
平面上的直线可以用y=kx+q表示,
(k',q')
(a)image space
(b)hough space
图像空间中,同一直线上的点的斜率和截距相同,满足 yi= kxi + q 参数方程 q= -xk+y 直线对应于霍夫空间中的点(k,q)。
一个点的情况:
(x1,y1)
(a)image space 图像空间中, 一个点对应霍夫空间中的一条直线。
(1)给定参数方程,可以利用霍夫变换检测 图像中的任何图形。 (2)霍夫空间中,曲线的交点次数越多,所 代表的参数越确定,画出的图形越饱满。ma Nhomakorabealab实现
BW=imread('chepai.jpg'); //1.二值化 BW=im2bw(BW); //2.canny边缘检测 thresh=[0.01,0.17]; sigma=2;%定义高斯参数 f = edge(double(BW),'canny',thresh,sigma); //3.霍夫变换 [H, theta, rho]= hough(f,'RhoResolution', 1); peak=houghpeaks(H,2); hold on //4.直线检测 lines=houghlines(f,theta,rho,peak); figure,imshow(f,[]),title('Hough Transform Detect Result'),hold on for k=1:length(lines) xy=[lines(k).point1;lines(k).point2]; plot(xy(:,1),xy(:,2),'LineWidth',4,'Color',[1 0 0]); end
q q=-2k+4 q=-2k+3 q=-2k+1
(a)Image space q = -xk+y 无法确定图像空间中的垂线。
(b) hough space
k
转化为极坐标下的参数方程:
x1cosθ+y1sinθ=ρ
x1cosθ=ρcos2θ y1sinθ=ρsin2θ
图像空间中的点,对应了霍夫空间中的曲线。 曲线的交点确定了一组参数,能够描述图像空间中的特定直线。