FANUC主轴定位pdf
FANUC主轴定位教程

FANUC主轴定位教程主轴定位是指通过编程操作,将机床主轴定位至指定位置。
在FANUC数控系统中,主轴定位操作相对简单,只需使用一条主轴定位命令即可实现。
本教程将介绍FANUC系统下的主轴定位操作步骤。
步骤一:选择合适的工具在进行主轴定位前,首先需要选择合适的工具。
根据不同的加工任务,选择适合的刀具进行操作。
同时,需根据加工要求选择合适的主轴速度和进给速度。
步骤二:设置工作坐标系在进行主轴定位操作之前,需要先设置工作坐标系。
可以通过FANUC系统的G代码进行设置,具体方法如下:1.进入手动编程模式,选择"POS"选项2.输入"PROG"命令,选择"O"选项3.输入G代码,并设置需要的坐标系。
例如,输入G54表示选择工件坐标系14.设置坐标系后,进入运行模式。
步骤三:编写主轴定位程序在FANUC系统中,主轴定位程序采用G代码编写。
下面是一个典型的主轴定位程序示例:```G代码O0001(主轴定位程序)G90(设置绝对坐标模式)G54(选择工件坐标系1)G0X100Y100(将刀具移动到指定位置)M3 S1000(开启主轴,并设置主轴速度为1000rpm)G4P2(停留2s,等待主轴达到设定速度)M5(关闭主轴)M30(程序结束,返回程序起始位置)```在上面的示例代码中,G90命令设置绝对坐标模式,G54命令选择工件坐标系1、然后通过G0命令将刀具移动到指定位置,M3命令开启主轴,并设置主轴速度为1000rpm。
通过G4命令停留2s,等待主轴达到设定转速。
最后,通过M5命令关闭主轴,M30命令结束程序。
步骤四:运行主轴定位程序1.选择"EDIT"模式,输入主轴定位程序号。
2.按下"RUN"按钮,机床开始执行主轴定位程序。
3.观察机床操作情况,确保刀具移动到了指定位置。
4.主轴达到设定速度后,切勿离开机床,必要时可以进行加工操作。
有关于发那科主轴定位参数设定
(No:5312)411 伺服报警:n轴超差N轴(攻丝轴1~4)运动时的误差超过设定值(No:5313或5314)413 伺服报警:n轴LSI溢出N轴(攻丝轴1~4)的误差计数器的值超过-231~231,请修改有关位置环的参数。
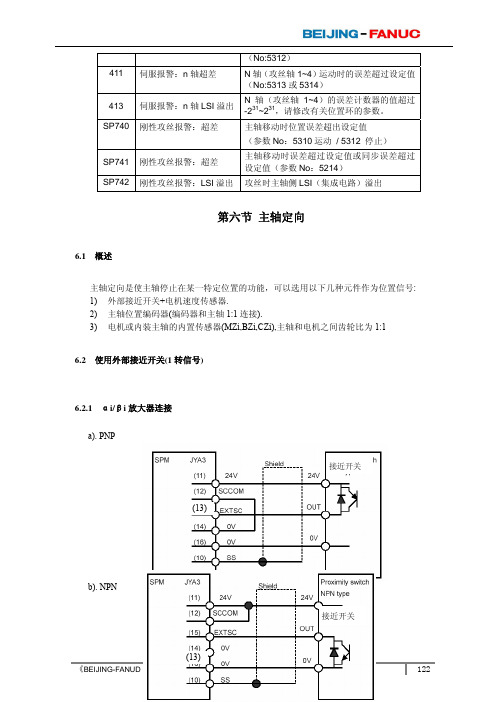
SP740 刚性攻丝报警:超差主轴移动时位置误差超出设定值(参数No:5310运动 / 5312 停止)SP741 刚性攻丝报警:超差主轴移动时误差超过设定值或同步误差超过设定值(参数No:5214)SP742 刚性攻丝报警:LSI溢出攻丝时主轴侧LSI(集成电路)溢出第六节主轴定向6.1 概述主轴定向是使主轴停止在某一特定位置的功能,可以选用以下几种元件作为位置信号:1)外部接近开关+电机速度传感器.2)主轴位置编码器(编码器和主轴1:1连接).3)电机或内装主轴的内置传感器(MZi,BZi,CZi),主轴和电机之间齿轮比为1:16.2 使用外部接近开关(1转信号)6.2.1 αi/βi放大器连接a). PNPb). NPN(13)(13)接近开关接近开关c). 两线NPN6.2.3 参数设定. αi/βi 放大器参数号 设定值 备注4000#0 0/1 主轴和电机的旋转方向相同/相反 4002#3,2,1,00,0,0,1 使用电机的传感器做位置反馈 4004#2 1 使用外部一转信号 4004#3 根据表1设定 外部开关信号类型 4010#2,1,0 0,0,1 设定电机传感器类型 4011#2,1,0 初始化自动设定 电机传感器齿数 4015#0 1 定向有效4056-4059 根据具体配置 电机和主轴的齿轮比 4171-4174 根据具体配置 电机和主轴的齿轮比6.2.4 外部开关类型的参数说明1) 表1,参数4004#3的设定(对于αi/βi 放大器) 开关 检测方式 开关类型 SCCOM 接法(13)设定值 二线 24V(11脚)0 NPN 0V(14脚) 0 常开 PNP 24V(11脚) 1 NPN 0V(14脚) 1 突起 常闭 PNP 24V(11脚) 0 NPN 0V(14脚) 0 常开 PNP 24V(11脚) 1 NPN 0V(14脚) 1 三线凹槽常闭PNP 24V(11脚)接近开关注:检测方式如下图所示:2) 对于主轴电机和主轴之间不是1:1的情况,一定要正确设定齿轮比(参数4056-4059 和4500-4503)。
FANUC主轴定位教程
2。当主轴从定向速度的上下限之间进入定向操作,如下
① 当主轴从定向上下限速度之间进入定向操作时,系统直接检测一转信号并建立零点基准(注1) ② 当检测到一转信号后,主轴以参数no.4320~4323 所设定的加减速进行减速。 ③ 当减速到定向的下限值后(系统内部计算),进入位置环控制,以参数no.4060~4063位置环增益 来进行控制。同时根据先前一转信号所建立的基准和定位的位置参数no.4031、偏移参数no.4077进
北京发那科机电有限公 司
NO.4002 bit0,bit1,bit2,bit3 定义连接到JYA3或JYA4的传感器类型 0,0, 1, 1 0,1, 0, 0 分离型BZi和CZi传感器 as位置编码器
2。关于速度环的参数
NO.4018 bit5 高速定向时速度补偿指令有无,通常设1为有补偿 NO.4038 NO.4023 4024 NO.4050 4051 NO.4056 ~ 4059 NO.4320 ~ 定向时电机的减速时的加速度(通过CTH1A,CTH2A 来选择)单位10min-1/sec (为0时,高速定向无效。设定值加大定向时间缩短) 定向时速度上限值(min-1) 定向时速度环的比例增益 (通过CTH1A信号来选择) 定向时速度环的积分增益 (通过CTH1A信号来选择) 主轴和电机间的齿轮比(通过CTH1A,CTH2A来选择) (设定值=主轴一转对应电机的转速ⅹ100)
④ 当减速定向速度下限后,进入位置环控制。由参数no.4060~4063位置环增益来进行控制,
北京发那科机电有限公 司
同时根据先前所建立的零位基准和定位位置参数no4031、偏移参数no.4077来进行定位。 ⑤ 当定向位置小于参数no.4075范围后,主轴定向结束信号发出。 注1 零位基准的建立只是在第一次通电时才进行。当以后的进行定向操作时应是直接进入位置环, 进行定位控制。
论FANUC系统主轴定向功能的实现
论FANUC系统主轴定向功能的实现主要介绍FANUC 0i-TD系统串行伺服主轴利用主轴位置编码器或电机内置编码器实现主轴定向的方法及应用。
标签:FANUC系统;串行伺服主轴;定向;位置编码器0 引言主轴定向是使主轴停止在某一位置的功能。
随着数控车床的普遍使用,为了满足机床自动换刀或特殊加工工艺的要求,经常需要主轴具有定向功能。
主轴定向是FANUC数控系统的一项基本功能,可以通过主轴位置编码器或电机内置编码器来实现,其控制是由硬件连接,参数设定和PMC梯形图组成。
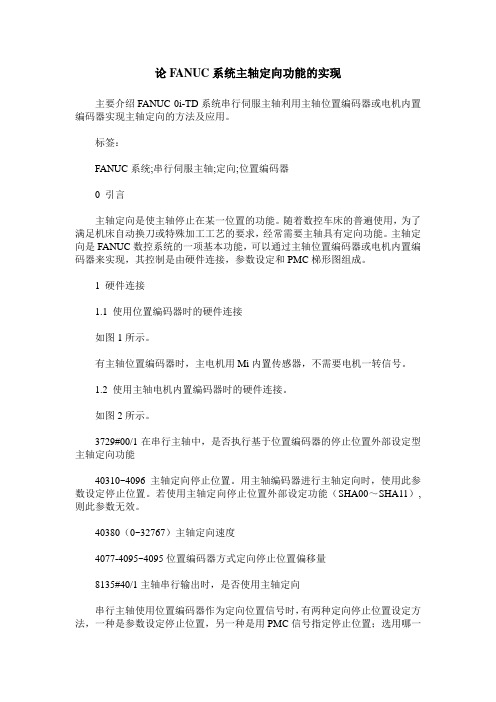
1 硬件连接1.1 使用位置编码器时的硬件连接如图1所示。
有主轴位置编码器时,主电机用Mi内置传感器,不需要电机一转信号。
1.2 使用主轴电机内置编码器时的硬件连接。
如图2所示。
3729#00/1在串行主轴中,是否执行基于位置编码器的停止位置外部设定型主轴定向功能40310~4096主轴定向停止位置。
用主轴编码器进行主轴定向时,使用此参数设定停止位置。
若使用主轴定向停止位置外部设定功能(SHA00~SHA11),则此参数无效。
40380(0~32767)主轴定向速度4077-4095~4095位置编码器方式定向停止位置偏移量8135#40/1主轴串行输出时,是否使用主轴定向串行主轴使用位置编码器作为定向位置信号时,有两种定向停止位置设定方法,一种是参数设定停止位置,另一种是用PMC信号指定停止位置;选用哪一种定向停止位置设定方法可用参数3729#0(在串行主轴中,是否执行基于位置编码器的停止位置外部设定型主轴定向功能)选择,用参数设定停止位置时,该参数设为0,用PMC信号指定停止位置时,该参数设为1。
用参数设定时只能设定一个停止位置,需要调整停止位置时只能修改停止位置参数4077的值,计算公式为:偏移量=设定值/4095*360°;用PMC信号指定停止位置时,只要改变PMC信号的输入,就可以改变定向停止位置。
3 梯形图的编制(1)相关信号。
Fanuc的G代码及M代码(2020年7月整理).pdf
Fanuc的G代码及M代码。
G00定位G01直线切削G02顺时针方向圆弧切削G03逆时针方向圆弧切削G04暂停指令G09正确停止检测G10补正设定G12顺时针方向圆周切削G13逆时针方向圆周切削G15极座标系统取消G16极座标系统设定G17XY平面设定G18XZ平面设定G19YZ平面设定G20英制单位设定G21公制单位设定G22软体极限设定G23软体极限设定取消G27机械原点复归检测G28自动经中间点复归机械原点G29自动从参考点复归G30自动复归到第二原点G40刀具半径补正取消G41刀具半径偏左补正G42刀具半径偏右补正G43刀具长度沿正向补正G44刀具长度沿负向补正G49刀具长度补正取消G45刀具位置补正增加G46刀具位置补正减少G47刀具位置补正两倍增加G48刀具位置补正两倍减少G50比例功能取消OFFG51比例功能设定ONG52回复到基本座标系统G53回复到机械座标系统G54第一工件座标系统G55第二工件座标系统G56第三工件座标系统G57第四工件座标系统G58第五工件座标系统G59第六工件座标系统G60 外部补正G70圆周等分段循环G71圆周分段循环G72直线分段循环G73高速喙钻循环G74左旋牙切削循环G76精搪孔循环G77反面搪孔循环G80固定循环取消G81钻孔循环G82沉头孔加工循环G83啄钻循环G84右旋牙切削循环G85搪孔循环G86搪孔循环G87搪孔循环G88搪孔循环G89搪孔循环G90绝对指令座标值设定G91增量指令座标值设定G92绝对程式零点设定G94每分钟进给量设定mm/minG95每转进给给设定mm/revG98固定循环,刀具复归到起始点G99固定循环,刀具复归到R点M00 程序停止M01 選擇性程序停止M02 程序結束M03 主軸順時針旋轉M04主轴逆时针旋转M05主轴停止M06刀具交换M07雾化冷却液开启M08冷却液开启M09冷却液关启M10工作台(B轴)锁住M11工作台(B轴)松开M13主轴顺时针转动及加切削液M14主轴逆时针转动及加切削液M15正方向运动M16负方向运动M19主轴定位M30程式结束记忆体回归M90程式中断取消M91程式中断设定M92多段暂存取消M93多段暂存设定M94镜像投影工能取消M95镜像投影工能设定M96刀具补正圆弧转角模式M97刀具补正交角转角模式M98副程式呼叫M99副程式结束。
FANUC主轴定向的调试步骤这么详细的教程不多了
FANUC主轴定向的调试步骤这么详细的教程不多了调试FANUC机器人的主轴定向时,以下是一些详细的步骤,以确保定向的成功。
1.确认机器人的主轴定向类型:在FANUC机器人上,主轴定向分为两种类型:直接定向和基准定向。
直接定向是根据主轴本身的编码器进行定向,基准定向是通过测量主轴和机器人轴的关系来进行校准。
需要根据机器人的配置确定使用哪种类型的定向。
2.准备定向工具:根据机器人配置和定向类型,准备相应的定向工具。
如使用直接定向,则需要使用主轴编码器读数仪和相应的传感器;如使用基准定向,则需要使用测距仪和角度传感器。
3.连接定向工具:将定向工具连接到主轴和机器人轴上。
确保连接安全可靠,并确保传感器能够准确读取相关数据。
4.定向参数的设置:根据机器人的配置和定向类型,进入机器人控制系统的参数设置菜单,设置定向相关参数。
这些参数包括主轴和机器人轴之间的关系、主轴编码器的分辨率等。
5.执行定向程序:根据机器人控制系统的操作界面,执行主轴定向程序。
根据具体的指导操作,逐步进行定向。
这些步骤可能包括启动主轴、采集数据、分析数据等。
6.定向结果的评估:根据定向程序的结果,评估定向的质量。
检查定向误差是否在可接受范围内,如何校准误差的大小等。
7.重新校准:根据定向结果的评估,判断是否需要重新校准。
如果定向误差在可接受范围内,则可以继续下一步操作。
如果定向误差较大,则需要重新调整定向参数,并重新执行定向程序。
8.定向结果的记录:记录定向结果,包括定向参数、定向误差等。
这样可以方便以后的参考和调整。
总结:以上是FANUC机器人主轴定向的详细步骤,根据机器人的配置和定向类型,可能会有一些差异。
通过仔细遵循上述步骤,并根据实际的情况进行适当的调整,可以确保主轴定向的成功。
FANUC主轴定位控制技术

FANUC主轴定位通常主轴只是进行速度控制,但在一些特殊的情况下也需要对主轴进行位置控制。
例如:在加工中心上进行自动换刀时、镗孔加工中因工艺要求而需要让刀时,以及车床在装卡工件等时都需要主轴准确的停在一个特定的位置上。
这就是我们通常所说的主轴定向功能。
主轴定向功能就是NC发出定向命令,通过主轴上的位置传感器上的一转信号使主轴停止在一个确定的位置上,并向伺服电机位置环一样提供一定的保持力矩。
一:主轴位置传感器的种类通常我们可以进行位置控制的传感器有以下几类。
MZI传感器:轮齿结构输出为正旋波(系统内部证行为方波)与主轴电机构成一体结构。
BZI传感器:轮齿结构输出为正旋波(系统内部整形为方波),其反馈信号经专用前置放大器输出,一般应用在FANUC内装主轴上,也可装配在主轴头上。
外形图如下感应头:感应速度信号和一转信号,注意与齿环的感应距离。
一转信号环:一圈之内有一条齿牙,产生一转信号。
A,B相齿牙环:产生A,B相脉冲,一圈有128、256、384、512齿/转等CZi传感器:轮齿结构与BZi基本相同,齿数512齿/转到1024齿/转。
a位置编码器:数字信号输出(插动式方波A、B、Z相)1024脉冲/转。
as位置编码器:模拟信号输出(正旋波A,B,Z相)1024齿/转接近开关:通过主轴上的接近开关和主轴电机上Mi传感器进行主轴的定位磁传感器定位:在没有接近开关实现定位控制之前,使用磁传感器实现主轴的定位功能,它由发磁体和探头及前置放大器组成。
成本较高。
机械定位:不使用主轴单元参与控制定向,而是使主轴电机旋转在一个特定的速度下,使用外部定位销使主轴停止在一个特定的位置上。
二:连接图例1 MZi的连接。
FANUC主轴定位教程

FANUC主轴定位教程
本教程将介绍如何在FANUC数控系统上对主轴进行定位。
主轴定位是
在加工过程中将主轴定位到预设的位置上,以便进行下一道工序的加工。
在数控加工中,主轴定位是非常重要的操作,可以有效地提高加工效率和
精度。
在FANUC数控系统中,主轴定位可以通过设置G代码和M代码来实现。
在进行主轴定位之前,首先要确定主轴的位置和方向。
通常情况下,主轴
的位置是根据加工零件的要求和工艺要求来确定的。
下面是在FANUC数控系统上进行主轴定位的步骤:
1.设置主轴的初始位置和方向
在进行主轴定位之前,需要设置主轴的初始位置和方向。
可以通过手
动控制面板或编程设置主轴的初始位置和方向。
在设置主轴的初始位置时,可以使用G代码和M代码来控制主轴的转动方向和速度。
2.编写主轴定位程序
在进行主轴定位之前,需要编写主轴定位程序。
主轴定位程序通常包
括G代码和M代码,用于控制主轴的动作和位置。
编写主轴定位程序之前,需要确定主轴的目标位置和方向。
3.载入主轴定位程序
编写完主轴定位程序之后,需要将其载入到数控系统中。
可以通过U
盘或局域网等方式将主轴定位程序传输到数控系统中。
在载入主轴定位程
序时,需要确认程序的正确性和完整性。
4.执行主轴定位程序
当主轴定位程序载入到数控系统中后,可以执行该程序进行主轴定位。
在执行主轴定位程序时,需要确认主轴的位置和方向是否正确,以确保加
工过程的顺利进行。
总结:。
FANUC数控车床操作编程手册.pdf

刀架干涉检查 自动运行前,请根据程序所指定的刀具及执行数据,进行刀架干涉检查。
绝对值/增量值方式 请确认所编程序的运行方式。
4
2.HTM 系列 主 要 技 术 参 数
备返回。 7) 不要弄脏、损坏或移走安全标志牌。 8) 穿戴适合安全操作的鞋帽和防护眼镜。 9) 保持机床和工作区域的清洁。 10) 定期检查和调整机床、安全操作牢记心。 11) 当使用水溶性冷却液时,要选用不腐蚀机床的原液。 12) 机床停用时要切断电源。 13) 出现危急情况时请按紧急按钮。 14) 更换保险丝要在电源关闭后进行。 15) 操作者的双脚周围要留有足够的空间。 16) 为防止滑倒应及时清除地面的油或水。 17) 按动并确认所有开关完好后再进行操作。 18) 不要无意识的去接触开关。 19) 当有 2 位以上人员一起操作时,相互间一定要密切沟通。 20) 操作前总是先要关上门。 21) 操作自动门(特殊附件)动作时不要让手或身体进入设备内。
1.3 与编程相关的警告
坐标系的设定 如果没有设置正确的坐标系,即使指定了正确的指令,机床仍有可能发生误动作。
3
快速定位 当进行快速定位时,请仔细确认刀具的路径正确性。
英制/公制转换 输入的英制和公制转换并不转换例如工件的原点、参数和当前的位置这些数据的测 量单位。因此的启动机床前,要确定采用何种单位。
2
22) 在主轴旋转过程中,不要接触主轴或工件,也不要清理切屑。 23) 不要试图用手或其它物体使主轴停转。 24) 确定工件是否已安全地夹紧在卡盘上,否则是很危险的,因为主轴旋转时件蹦出就
FANUC+主轴定位.pdf

主轴定位1.简介:车床主轴定位(或成为主轴分度),不同于主轴定向,定向是一点定位,靠PMC来完成。
而定位是任意角度定位,且由NC来实现的,相当于C轴。
该功能是车床通过主轴电机侧的MZi传感器或与主轴连接的位置编码器实现的(模拟主轴只能通过编码器来检测C轴位置),与CS轮廓控制功能相比,其定位分辨率为0.088度,且不能与其他轴插补,但检测器用的电机侧的或是位置编码器,所以安装简单。
通常,定位完成后,主轴由机械夹紧。
2.系统配置:1)串行主轴使用电机内置MZi传感器2)串行主轴使用外置编码器(1024脉冲)3)模拟主轴,使用外置编码器(1024脉冲)变频器必须能够接受正/负变频电机3.参数设定:5.梯形图实现:6.动作过程:实际动作过程,执行M80,主轴进入spindlepositioncontrol(可通过主轴监视画面看出),给出松开阀输出,松开到位检测为1,主轴旋转,找到一转信号停止,主轴电机励磁,执行M90(45度),电机旋转至45度,再指令M90,再转45度,到90度停。
M90-97并不是电机一圈八个位置的定位,而是各自代表45度倍数的增量定位指令,譬如M90是45度,每指令一次,就在当前位置走45度。
同样M91就是90度,M92就是135度,。
M96315度,M97360度。
执行C或H指令时,由于分辨精度是360/4096=0.088度,所以假如指令C0.001程序可以执行,但实际电机并没有移动,定位精度只能到0.1度左右。
M81取消定位方式,变为普通的主轴速度控制方式。
设参数4950#0IOR1:复位时主轴定位方式解除。
同时G28.6中串入F1.1复位信号。
主轴定位
北京发那科机电有限公 司
感应头:感应速度信号和一转信号,注意与齿环的感应距离。 一转信号环:一圈之内有一条齿牙,产生一转信号。 A,B相齿牙环:产生A,B相脉冲,一圈有128、256、384、512齿/转等。
北京发那科机电有限公 司
CZi传感器:轮齿结构与BZi基本相同,齿数512齿/转到1024齿/转。 a位置编码器:数字信号输出(插动式方波 A、B、Z相)1024脉冲/转。 as位置编码器:模拟信号输出(正旋波 A,B,Z相)1024齿/转 接近开关:通过主轴上的接近开关和主轴电机上Mi传感器进行主轴的定位 磁传感器定位:在没有接近开关实现定位控制之前,使用磁传感器实现主轴的 定位功能,它由发磁体和探头及前置放大器组成。成本较高。 机械定位:不使用主轴单元参与控制定向,而是使主轴电机旋转在一个特定的 速度下,使用外部定位销使主轴停止在一个特定的位置上。 二 :连接图例 1 MZi的连接
北京发那科机电有限公 司
NO.4002 bit0,bit1,bit2,bit3 定义连接到JYA3或JYA4的传感器类型 0,0, 1, 1 0,1, 0, 0 分离型BZi和CZi传感器 as位置编码器
2。关于速度环的参数
NO.4018 bit5 高速定向时速度补偿指令有无,通常设1为有补偿 NO.4038 NO.4023 4024 NO.4050 4051 NO.4056 ~ 4059 NO.4320 ~ 4323 定向时电机的减速时的加速度(通过CTH1A,CTH2A 来选择)单位10min-1/sec (为0时,高速定向无效。设定值加大定向时间缩短) 定向时速度上限值(min-1) 定向时速度环的比例增益 (通过CTH1A信号来选择) 定向时速度环的积分增益 (通过CTH1A信号来选择) 主轴和电机间的齿轮比(通过CTH1A,CTH2A来选择) (设定值=主轴一转对应电机的转速ⅹ100)
fanuc主轴定位参数

fanuc主轴定位参数主轴定位是数控加工中的一项重要工艺,它能够确保工件在加工时的准确定位。
本文将为大家介绍Fanuc主轴定位参数的相关知识。
1.主轴定位测量主轴定位测量是确保主轴的定位精度的一项重要步骤。
在进行主轴定位测量时,需要注意以下参数:1.1主轴冷态定位误差(Cold state positioning error)主轴在冷态下进行定位时产生的误差称为主轴冷态定位误差。
这个误差能够反映出主轴在定位时的精度。
1.2主轴热态定位误差(Hot state positioning error)主轴在工作温度下进行定位时产生的误差称为主轴热态定位误差。
这个误差能够反映主轴在工作状态下的定位精度。
2.主轴定位参数调整方法在进行主轴定位参数调整时,需要注意以下方法:2.1预紧法(Pre-tightening method)预紧法是通过调整主轴及滚动轴承的紧固力矩来调整主轴定位参数的一种方法。
通过适当调整紧固力矩,可以提高主轴的定位精度。
2.2温度补偿法(Temperature compensation method)温度补偿法是通过测量主轴和工件的温度变化来进行定位参数调整的一种方法。
通过对主轴温度变化的测量和分析,可以根据温度变化来调整主轴的定位参数,以确保定位精度。
3.主轴定位参数调整注意事项在进行主轴定位参数调整时,需要注意以下事项:3.1定期检查(Regular inspection)定期检查主轴的定位参数是确保主轴定位精度的重要手段。
通过定期检查,可以及时发现并解决主轴定位参数的问题,保证加工的准确性。
3.2技术培训(Technical training)对操作人员进行定期的技术培训,使其了解主轴定位参数的调整方法和注意事项,提高其操作技能和定位精度。
通过本文的介绍,我们了解了Fanuc主轴定位参数的相关知识。
主轴定位是数控加工中非常重要的工艺,准确的定位能够保证工件加工的精度和质量。
我们应该重视主轴定位参数的调整和检查工作,以确保加工过程中的准确性和稳定性。
FANUC主轴定位主轴编码器相关知识剖析

FANUC主轴定位主轴编码器相关知识剖析主轴定位通常主轴只是进行速度控制,但在一些特殊的情况下也需要对主轴进行位置控制。
例如:在加工中心上进行自动换刀时、镗孔加工中因工艺要求而需要让刀时,以及车床在装卡工件等时都需要主轴准确的停在一个特定的位置上。
这就是我们通常所说的主轴定向功能。
主轴定向功能就是NC发出定向命令,通过主轴上的位置传感器上的一转信号使主轴停止在一个确定的位置上,并向伺服电机位置环一样提供一定的保持力矩。
相关链接:FANUC 主轴定位诊断参数445不显示怎么办?FANUC 主轴过热报警怎么出来的?FANUC 主轴放大器模块报警-详解主轴位置传感器的种类通常我们可以进行位置控制的传感器有以下几类。
1:MZi 传感器轮齿结构输出为正旋波(系统内部整形为方波)与主轴电机构成一体结构。
2:BZi 传感器轮齿结构输出为正旋波(系统内部整形为方波),其反馈信号经专用前置放大器输出,一般应用在FANUC内装主轴上,也可装配在主轴头上。
外形图如下:感应头:感应速度信号和一转信号,注意与齿环的感应距离。
一转信号环:一圈之内有一条齿牙,产生一转信号。
A,B相齿牙环:产生A,B相脉冲,一圈有128、256、384、512齿/转等。
3:CZi 传感器轮齿结构与BZi基本相同,齿数512齿/转到1024齿/转。
4:a位置编码器数字信号输出(插动式方波 A、B、Z相)1024脉冲/转。
5:as位置编码器模拟信号输出(正旋波 A,B,Z相)1024齿/转。
6:接近开关通过主轴上的接近开关和主轴电机上Mi传感器进行主轴的定位。
7:磁传感器定位在没有接近开关实现定位控制之前,使用磁传感器实现主轴的定位功能,它由发磁体和探头及前置放大器组成。
成本较高。
8:机械定位不使用主轴单元参与控制定向,而是使主轴电机旋转在一个特定的速度下,使用外部定位销使主轴停止在一个特定的位置上。
位置传感器的连接图例1:MZi 传感器的连接2:BZi和CZi的连接3:a 位置编码器的连接4:as位置编码器的连接5:接近开关的连接主轴定向时序图1:停止时的定向注释1:定向时的旋转方向可通过参数(NO.4003#2#3)来设定,通常设定跟随前次主轴的旋转方向2:高速旋转时的定向主轴高速定向时序:主轴高速定向是充分利用主轴电机的加减速特性和位置环的高增益化来实现的一种高速特性。
fanuc发那科0I-9000参数及0M的一些参数维修说明书故障分析解决
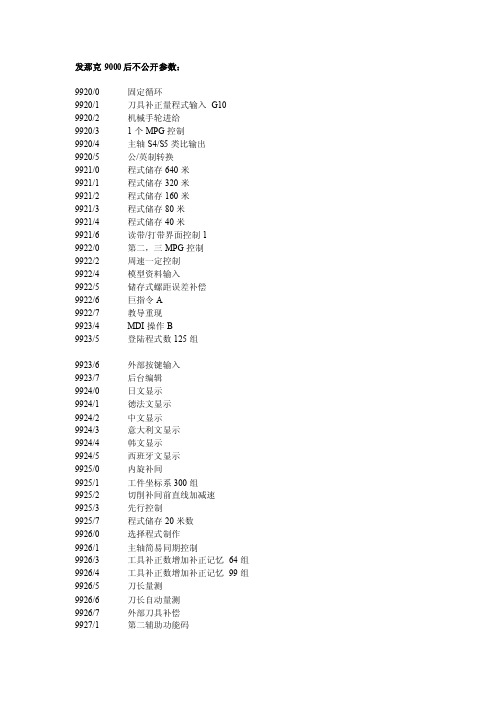
发那克9000后不公开参数:9920/0 固定循环9920/1 刀具补正量程式输入G10 9920/2 机械手轮进给9920/3 1个MPG控制9920/4 主轴S4/S5类比输出9920/5 公/英制转换9921/0 程式储存640米9921/1 程式储存320米9921/2 程式储存160米9921/3 程式储存80米9921/4 程式储存40米9921/6 读带/打带界面控制19922/0 第二,三MPG控制9922/2 周速一定控制9922/4 模型资料输入9922/5 储存式螺距误差补偿9922/6 巨指令A9922/7 教导重现9923/4 MDI操作B9923/5 登陆程式数125组9923/6 外部按键输入9923/7 后台编辑9924/0 日文显示9924/1 徳法文显示9924/2 中文显示9924/3 意大利文显示9924/4 韩文显示9924/5 西班牙文显示9925/0 内旋补间9925/1 工件坐标系300组9925/2 切削补间前直线加减速9925/3 先行控制9925/7 程式储存20米数9926/0 选择程式制作9926/1 主轴简易同期控制9926/3 工具补正数增加补正记忆64组9926/4 工具补正数增加补正记忆99组9926/5 刀长量测9926/6 刀长自动量测9926/7 外部刀具补偿9927/1 第二辅助功能码9927/2 三轴同动9927/3 增加轴控制9927/4 工件计数及跑合时间显示9927/6 工具径补正(切削补偿)C9927/7 工具径补正(切削补偿)B9928/1 原点复归速度设定9928/4 3次元坐标变换9929/0 绘图显示9929/1 程式图形对话9929/2 扩张内藏式行程检查9929/3 行程极限外部设定9929/6 外部讯息9930/1 程式再启动9930/1 程式再启动9930/2 外部资料输入9930/3 螺旋切削9903/5 PMC轴控制9930/6 自动转角进给率9931/0 单方向定位9931/2 刚性攻牙9931/3 时钟显示9931/6 卡式磁片资料显示9931/7 0.1单位增量系统9932/0 第三及第四回参考点9932/1 比率缩放9932/2 坐标系旋转9932/3 F15纸带格式9932/4 刀具寿命管理9932/5 工具补正数增加补正记?200组9932/6 增加选择性单节跳跃(最大)19个9932/7 巨集执行器9933/1 极坐标命令9933/3 F1段进给9933/4 I/O装置外部控制9933/5 四轴同动9933/6 中断形式巨集指令9933/7 巨集指令B9934/1 遥控式缓衡器9934/2 高速遥控式缓衡器A9934/3 高速遥控式缓衡器B9934/4 读带/打带界面控制29934/6 切削进给补间后直线加减速9935/0 高速循环加工9935/1 刀具补正记忆形式B9935/2 外部机械零点漂移9935/4 外部减速9935/5 动态绘图显示9935/6 登陆程式个数400组9935/7 登陆程式个数200组9936/0 刀具位置补正9936/2 选择性道角/转角R9936/3 简易同期制御9936/4 高速跳跃信号输入9936/7 扩张工件程式编辑程式COPY 9937/0 圆筒补间9937/1 S串列式输出9937/2 极坐标补间9937/3 Cs轴轮廓控制9937/5 C轴法线方向制御9937/6 刀具寿命管理512组9937/7 I/O同时操作9939/6 CAP19939/7 CAP19940/0 DNC-19940/3 索引功能9940/4 主轴同期制御9941/0 第一主轴定位9941/2 第一主轴输出切换9942/0 第二主轴定位9942/2 第二主轴定位9943/2 倾斜轴制御9943/3 制御轴扩张9943/5 登绿程式个数100组9943/6 程式儲存储1280米9943/7 工件座标系48组9944/0 切削进给速度调整9944/1 特殊JOG进给率调整9944/2 轴取出机能9944/3 浮动原点复归9944/4 圆弧半径速度箝制9944/5 自动转角减速9945/0 高精度轮廓控制9945/1 工具退避和复归9945/2 圆形拷贝9945/3 实际速度类比输出9945/4 工件坐标系预设9945/6 3次元工具補正9945/7 切削进给補间后锺形加减9946/0 PLC5000step9946/1 PLC8000step9946/2 PLC16000step9946/3 PLC24000step9946/4 PLC3000step9946/5 PLC12000step9946/6 PMC-RC程式语言-1M 9946/7 信号波形表示机能9947/0 PMC保持型记忆追加9947/1 PLC32000step9947/2 PMC程式语言256K 9947/3 PMC程式语言512K 9947/5 PMC程式语言2M 9948/0 NC格式转换输出9948/1 C语言9948/7 程式对话Super CAP-M 9952/4 指数函数补间9952/5 工具补正量499个9952/6 工具补正量999个9952/7 多段Skip9953/1 程式储存5120米数9953/2 程式储存2560米数9953/3 DNC29953/5 OSI网路9954/6 学习制御9962/3 马达速度信号输出9962/6 真直度补正9963/0 PMC轴制御扩张机能9963/1 HDISK9963/2 特殊高速循环9963/4 PMC轴速度指令机能9963/5 旋转轴控制9963/6 高速循环资料追加A 9963/7 高速循环资料追加B 9970/7 平滑补间9972/7 假想轴补间9972/4 实际速度类比输出B 9972/6 I/Olink29972/7 简易高精度9973/0 手动数值指令9973/2 姿势制御9973/5 非均匀B形云线补间9973/6 高速分配功能9976/2 PROFIBUS slave9976/3 PROFIBUS master 9976/4 多单节预读9977/2 二重位置检出机能9977/5 1CPU2系统101/7 NFD 数据输出时数据后的同步孔的输出 O O102 输入输出设备号:0:普通RS-232口设备(用DC1-DC4码)3:Handy File(3″软盘驱动器) O O 103 波特率:10:480011:960012:19200 O OI/O 通道1的参数:111/0 SB2 停止位数 O O111/3 ASI 数据输入代码:ASCII或EIA/ISO O O111/7 NFD 数据输出时数据后的同步孔的输出 O O112 输入输出设备号:0:普通RS-232口设备(用DC1-DC4码)3:Handy File(3″软盘驱动器) O O 113 波特率:10:480011:960012:19200 O O其它通道参数请见参数说明书。
Fanuc——精选推荐
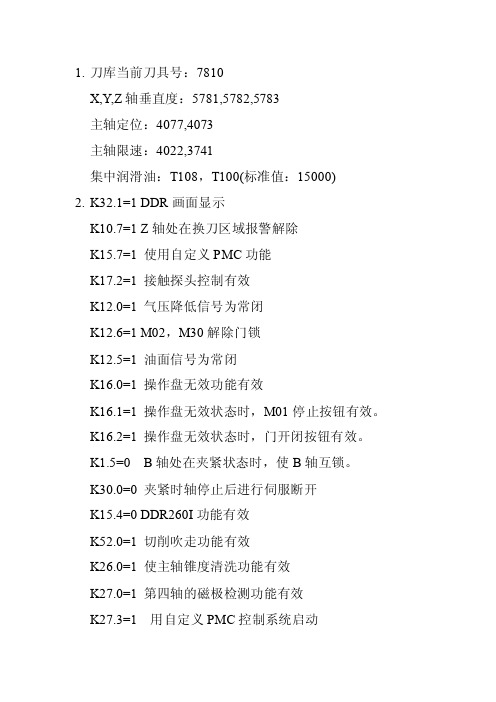
1.刀库当前刀具号:7810X,Y,Z轴垂直度:5781,5782,5783主轴定位:4077,4073主轴限速:4022,3741集中润滑油:T108,T100(标准值:15000)2.K32.1=1 DDR画面显示K10.7=1 Z轴处在换刀区域报警解除K15.7=1 使用自定义PMC功能K17.2=1 接触探头控制有效K12.0=1 气压降低信号为常闭K12.6=1 M02,M30解除门锁K12.5=1 油面信号为常闭K16.0=1 操作盘无效功能有效K16.1=1 操作盘无效状态时,M01停止按钮有效。
K16.2=1 操作盘无效状态时,门开闭按钮有效。
K1.5=0 B轴处在夹紧状态时,使B轴互锁。
K30.0=0 夹紧时轴停止后进行伺服断开K15.4=0 DDR260I功能有效K52.0=1 切削吹走功能有效K26.0=1 使主轴锥度清洗功能有效K27.0=1 第四轴的磁极检测功能有效K27.3=1 用自定义PMC控制系统启动K0.6=1 伺服调整显示画面K54.0 机内灯(0无效,1有效)K54.1 机内灯种类(0荧光灯,1 LED)K54.2 机内清洗(0无效,1有效)K34.0=1 润滑油画面显示K52.7=1 使用电量消耗监视K26.6=1 主轴风扇屏蔽K18.7=1 快捷数控报警画面显示3.3111.6 0:显示主轴电机速度1:显示出主轴速度3111.50:不进行监控显示1:进行监控显示8901.0是否进行风扇电机异常的检测(0:进行,1:不进行)8902.0是否显示定期维护寿命已尽信息(0:不显示,1:显示)1320 每个轴存储的冲程1的正方向边界的坐标值1321 每个轴存储的冲程1的负方向边界的坐标值3203.7 是否通过复位删除MDI方式创建的程序(0:不删除,1:删除)3290.7=1 使用程式保护锁,控制参数输入的禁止、允许3111.7=1 快捷画面显示报警,操作信息时,信息显示在画面顶部且只显示一条信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主轴定位
1.简介:
车床主轴定位(或成为主轴分度),不同于主轴定向,定向是一点定位,靠PMC 来完成。
而定位是任意角度定位,且由NC 来实现的,相当于
C 轴。
该功能是车床通过主轴电机侧的MZi 传感器或与主轴连接的位
置编码器实现的(模拟主轴只能通过编码器来检测C 轴位置),与CS 轮廓控制功能相比,其定位分辨率为0.088 度,且不能与其他轴插补,但检测器用的电机侧的或是位置编码器,所以安装简单。
通常,定位完成后,主轴由机械夹紧。
2.系统配置:
1)串行主轴使用电机内置MZi 传感器
2)串行主轴使用外置编码器(1024 脉冲)
3)模拟主轴,使用外置编码器(1024 脉
冲)变频器必须能够接受正/负模拟电
压(+/-10VDC)
变频电
机3.参数设
定:
其他参数的设定参照《0IC 连接说明书(功能)》的主轴定位部分。
5.梯形图实现:
6.动作过程:
实际动作过程,执行M80,主轴进入spindle position control (可通过主轴监视画面看出),给出松开阀输出,松开到位检测为1,主轴旋转,找到一转信号停止,主轴电机励磁,执行M90(45 度),电机旋转至45 度,再指令M90,再转45 度,到90 度停。
M90-
97 并不是电机一圈八个位置的定位,而是各自代表 45 度倍数的增量
定位指令,譬如
M90 是45 度,每指令一次,就在当前位置走45 度。
同样M91 就是90 度,M92 就是
135 度,。
M96 315 度,M97 360 度。
执行C 或H 指令时,由于分辨精度是360/4096=0.088 度,所以假如指令C0.001 程序可以执行,但实际电机并没有移动,定位精度只能到0.1 度左右。
M81 取消定位方式,变为普通的主轴速度控制方式。
设参数4950#0
IOR 1:复位时主轴定位方式解除。
同时G28.6 中串入F1.1 复位信
号。