机电系统动力学仿真matlab课后答案
电机与拖动基础及MATLAB仿真习题答案(第四章)
电机与拖动基础及MATLAB仿真习题答案(第四章)4-14 ⼀台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=87.5%,求电动机的额定电流和额定负载时的输⼊功率?解:(1)额定电流(2)输⼊功率4-15 ⼀台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输⼊功率?解:(1)额定电流(2)输⼊功率4-16 已知⼀台直流电机极对数p=2,槽数Z 和换向⽚数K 均等于22,采⽤单叠绕组。
试求:(1)绕组各节距;(2)并联⽀路数。
解:(1)第⼀节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第⼆节距415y 12=-=-=y y(2)并联⽀路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,⽓隙每极磁通Φ=2.1×10-2Wb ,试求:(1)采⽤单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持⽀路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联⽀路对数a=p=3,电磁转矩 m N I a pN T a ?==Φ=38.1310021.0314.3240032π如果把电枢绕组改为单波绕组, 保持⽀路电流a i 的数值不变,则电磁转矩也不变,仍为 13.369m N ?,因为⽆论是叠绕组还是波绕组,所有导体产⽣的电磁转矩的⽅向是⼀致的, 保持⽀路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
也可以⽤计算的⽅法: 单叠绕组时并联⽀路数为6,⽀路电流 A I i a a 6106==改为单波绕组, 保持⽀路电流a i 的数值不变,仍为A 610,⽽并联⽀路数为2 (a=1), 电枢电流A i I a a 3102== 电磁转矩 m N T ?==38.13310021.0114.324003。
MATlab 仿真部分习题答案
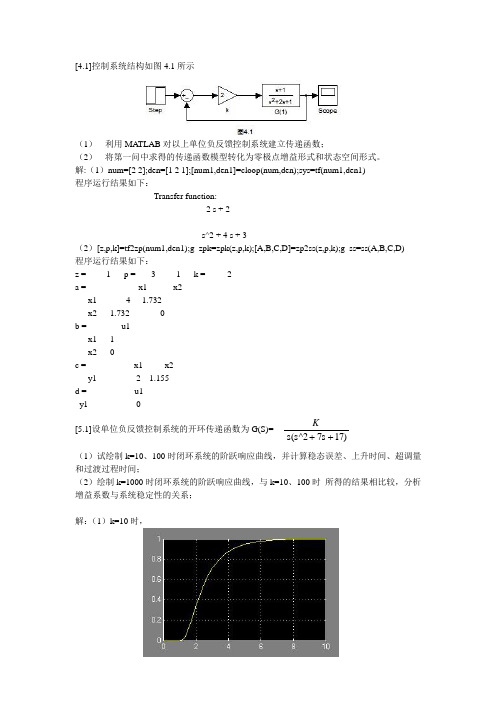
[4.1]控制系统结构如图4.1所示(1)利用MATLAB对以上单位负反馈控制系统建立传递函数;(2)将第一问中求得的传递函数模型转化为零极点增益形式和状态空间形式。
解:(1)num=[2 2];den=[1 2 1];[num1,den1]=cloop(num,den);sys=tf(num1,den1)程序运行结果如下:Transfer function:2 s + 2-------------s^2 + 4 s + 3(2)[z,p,k]=tf2zp(num1,den1);g_zpk=zpk(z,p,k);[A,B,C,D]=zp2ss(z,p,k);g_ss=ss(A,B,C,D)程序运行结果如下:z = -1 p = -3 -1 k = 2a = x1 x2x1 -4 -1.732x2 1.732 0b = u1x1 1x2 0c = x1 x2y1 2 1.155d = u1y1 0K[5.1]设单位负反馈控制系统的开环传递函数为G(S)=+s(s^2+7s17)(1)试绘制k=10、100时闭环系统的阶跃响应曲线,并计算稳态误差、上升时间、超调量和过渡过程时间;(2)绘制k=1000时闭环系统的阶跃响应曲线,与k=10、100时所得的结果相比较,分析增益系数与系统稳定性的关系;解:(1)k=10时,K=100时,K=10时,利用MA TLAB工作区输入程序:num=[10];den=[1,7,17,0];[z,p,k]=tf2zp( num,den);运行得z,p,k的值p= -3.5+2.1794*i -3.5-2.1794*i k=10G=zpk([ ],[-3.5+2.1794*i,-3.5-2.1794*i],10);c=dcgain(G);[y,t]=step(G);plot(t,y)[Y,K]=max(y);timetopeak=t(k);percentovershoot=100*(y-c)/cn=1;while y(n)<c n=n+1;end risetime=t(n) i=length(t);while(y(i)>0.98*c&y(i)<1.02*c) i=i-1;End setllingtime=t(i) 运行程序结果为:稳定值c=0.5882,响应时间setllingtime=1.0096s,上升时间risetime=1.1989s,最大峰值时间timetopeak=1.4356,超调量percentovershoot=0.555% 同理得k=100时,稳定值c=5.882,响应时间setllingtime=1.0096s, 上升时间risetime=1.1989s,最大峰值时间timetopeak=1.4356,超调量percentovershoot=0.555%(3)k=1000时,由其响应曲线可知,增益系数越大,其稳定性越差。
matlab课后习题答案(附图)

matlab课后习题答案(附图)习题2.1画出下列常见曲线的图形y (1)⽴⽅抛物线3x命令:syms x y;ezplot('x.^(1/3)')(2)⾼斯曲线y=e^(-X^2);命令:clearsyms x y;ezplot('exp(-x*x)')(3)笛卡尔曲线命令:>> clear>> syms x y;>> a=1;>> ezplot(x^3+y^3-3*a*x*y)(4)蔓叶线命令:>> clear>> syms x y;>> a=1ezplot(y^2-(x^3)/(a-x))(5)摆线:()()tsin-=,=-by1命令:>> clear>> t=0:0.1:2*pi;>> x=t-sin(t);>>y=2*(1-cos(t)); >> plot(x,y)7螺旋线命令:>> clear >> t=0:0.1:2*pi; >> x=cos(t); >> y=sin(t); >> z=t;>>plot3(x,y,z)(8)阿基⽶德螺线命令:clear>> theta=0:0.1:2*pi;>> rho1=(theta);>> subplot(1,2,1),polar(theta,rho1)(9) 对数螺线命令:cleartheta=0:0.1:2*pi;rho1=exp(theta);subplot(1,2,1),polar(theta,rho1)(12)⼼形线命令:>> clear >> theta=0:0.1:2*pi; >> rho1=1+cos(theta); >> subplot(1,2,1),polar(theta,rho1)练习2.21. 求出下列极限值(1)nnn n3→命令:>>syms n>>limit((n^3+3^n)^(1/n)) ans = 3(2))121(lim n n n n ++-+∞→命令:>>syms n>>limit((n+2)^(1/2)-2*(n+1)^(1/2)+n^(1/2),n,inf) ans = 0(3)x x x 2cot lim 0→命令:syms x ;>> limit(x*cot(2*x),x,0) ans = 1/2 (4))(coslimcm xx ∞→命令:syms x m ; limit((cos(m/x))^x,x,inf) ans = 1(5))111(lim 1--→exx x命令:syms x>> limit(1/x-1/(exp(x)-1),x,1) ans =(exp(1)-2)/(exp(1)-1) (6))(2lim x x xx -+∞>> limit((x^2+x)^(1/2)-x,x,inf)ans = 1/2练习2.41. 求下列不定积分,并⽤diff 验证:(1)+x dxcos 1>>Clear >> syms x y >> y=1/(1+cos(x)); >> f=int(y,x) f =tan(1/2*x) >> y=tan(1/2*x); >> yx=diff(y ,x); >> y1=simple(yx) y1 =1/2+1/2*tan(1/2*x)^2 (2)+exdx1clear syms x yy=1/(1+exp(x));f=int(y,x) f =-log(1+exp(x))+log(exp(x)) syms x yy=-log(1+exp(x))+log(exp(x)); yx=diff(y,x); y1=simple(yx) y1 = 1/(1+exp(x)) (3)dx x x ?sin 2syms x yy=x*sin(x)^2; >> f=int(y,x) f =x*(-1/2*cos(x)*sin(x)+1/2*x)-1/4*cos(x)^2-1/4*x^2 clearsyms x y y=x*(-1/2*cos(x)*sin(x)+1/2*x)-1/4*cos(x)^2-1/4*x^2; yx=diff(y,x); >> y1=simple(yx) y1 = x*sin(x)^2 (4)xdx ?sec3syms x y y=sec(x)^3;f=int(y,x) f =1/2/cos(x)^2*sin(x)+1/2*log(sec(x)+tan(x)) clear syms x yy=1/2/cos(x)^2*sin(x)+1/2*log(sec(x)+tan(x)); yx=diff(y,x); y1=simple(yx) y1 =1/cos(x)^32. 求下列积分的数值解 1)dx x-10clearsyms xy=int(x^(-x),x,0,1) y =int(x^(-x),x = 0 .. 1) vpa(y,10) ans =1.291285997 2)xdx e x cos3202?πclearsyms xy=int(exp(2*x)*cos(x)^3,x, clear syms xy=int((1/(2*pi)^(1/2))*exp(-x^2/2),x,0,1) y =7186705221432913/36028797018963968*erf(1/2*2^(1/2))*2^(1/2)*pi^(1/0,2*pi) y =22/65*exp(pi)^4-22/65vpa(ans,10)(3)dx xe21221-π>> clear >> syms x>> y=int(1/(2*pi)^(1/2)*exp(-x^2/2),0,1); >> vpa(y,14) ans =.341344746068552(4)>> clear >> syms x>> y=int(x*log(x^4)*asin(1/x^2),1,3); Warning: Explicit integral could not be found. > In sym.int at 58 >> vpa(y,14) ans = 2.45977212823752(5) >> clear >> syms x1判断下列级数的收敛性,若收敛,求出其收敛值。
电机与拖动基础及MATLAB仿真习题答案(第四章)

4-14 一台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=%,求电动机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-15 一台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-16 已知一台直流电机极对数p=2,槽数Z 和换向片数K 均等于22,采用单叠绕组。
试求:(1)绕组各节距;(2)并联支路数。
解:(1)第一节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第二节距415y 12=-=-=y y(2)并联支路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,气隙每极磁通Φ=×10-2Wb ,试求:(1)采用单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持支路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联支路对数a=p=3,电磁转矩 m N I a pN T a ⋅=⨯⨯⨯⨯⨯=Φ=38.1310021.0314.3240032π 如果把电枢绕组改为单波绕组, 保持支路电流a i 的数值不变,则电磁转矩也不变,仍A U P I N N N N 79.207875.022010403=⨯⨯==ηkWI U P N N 71.4579.2072201=⨯=⨯=A U P I N N N 5.35623010823=⨯==KW P P N 11.911==η为m N ⋅,因为无论是叠绕组还是波绕组,所有导体产生的电磁转矩的方向是一致的,保持支路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
东北林业大学机电工程学院电气matlab实验内容答案

实验一 MATLAB 运算基础1.先求下列表达式的值,然后显示MA TLAB 工作空间的使用情况并保存全部变量。
(1)22sin8511z e ︒=+ clear ;z1=2*sin(85/180*pi)/(1+exp(2))(2)12ln(2z x =+,其中2120.455i +⎡⎤=⎢⎥-⎣⎦clear ;x=[2,1+2*i;-0.45,5];z2=log(x+sqrt(1+x^2))/2(3)0.30.33sin(0.3), 3.0, 2.9, 2.8,,2.8,2.9,3.02a ae e z a a --=+=--- clear ;a=(-3:0.1:3);z3=((exp(0.3*a)-exp(-0.3*a))/2).*sin(a+0.3)(4)2220141122123t t z t t t t t ⎧≤<⎪=-≤<⎨⎪--≤<⎩,其中t =0:0.5:2.5clear for t=0:0.5:2.5 if t>=0 & t<1 z4=t^2elseif t>=1 & t<2 z4=t^2-1 else z4=t^2-2*t-1 end end 2.已知12344347873657A -⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,131203327B -⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦求下列表达式的值:(1) A+6=B 和A-B+I(其中I 为单位矩阵)。
(2) A*B 和A.*B 。
(3) A^3和A^.3 。
(4) A/B 和B\A 。
(5)[A ,B]和[A([1,3],;);B^2] 。
clearA=[12,34,-4;34,7,87;3,65,7]; B=[1,3,-1;2,0,3;3,-2,7]; Z1=A+6*B I=eye(3,3) Z11=A-B+IZ21=A.*B % The second A^3 % The third A.^3A/B % The forth B\A[A,B] % The fifth [A([1,3],:);B^2] 3.设有矩阵A 和B12345678910111213141516171819202122232425A ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦, 30161769023497041311B ⎡⎤⎢⎥-⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎣⎦(1) 求它们的乘积C 。
matlab课后习题及答案详解
matlab课后习题及答案详解第1章练习题1.安装matlab时,在选择组件窗口中哪些部分必须勾选,没有勾选的部分以后如何补安装?在安装matlab时,安装内容由选择组件窗口中个复选框是否被勾选来决定,可以根据自己的需要选择安装内容,但基本平台(即matlab选项)必须安装。
第一次安装没有选择的内容在补安装时只需按照安装的过程进行,只是在选择组件时只勾选要补装的组件或工具箱即可。
2.matlab操作方式桌面存有几个窗口?如何并使某个窗口瓦解桌面沦为单一制窗口?又如何将瓦解过来的窗口再次置放至桌面上?与其他计算机语言相比较,matlab语言注重的特点就是什么?matlab系统由那些部分共同组成?在matlab操作桌面上有五个窗口,在每个窗口的右上角有两个小按钮,一个是关闭窗口的close按钮,一个是可以使窗口成为独立窗口的undock按钮,点击undock按钮就可以使该窗口脱离桌面成为独立窗口,在独立窗口的view菜单中选择dock……菜单项就可以将独立的窗口重新防止的桌面上。
matlab具备功能强大、使用方便、输出简便、库函数多样、开放性弱等特点。
matlab系统主要由开发环境、matlab数学函数库、matlab语言、图形功能和应用程序接口五个部分组成。
3.如何设置当前目录和搜寻路径,在当前目录上的文件和在搜寻路径上的文件存有什么区别?命令历史窗口除了可以观测前面键入的命令外,除了什么用途?当前目录可以在当前目录浏览器窗口左上方的输入栏中设置,搜索路径可以通过选择操作桌面的file菜单中的setpath菜单项来完成。
在没有特别说明的情况下,只有当前目录和搜索路径上的函数和文件能够被matlab运行和调用,如果在当前目录上有与搜索路径上相同文件名的文件时则优先执行当前目录上的文件,如果没有特别说明,数据文件将存储在当前目录上。
命令历史窗口除了用作查阅以前键入的命令外,还可以轻易执行命令历史窗口中选取的内容、将选取的内容拷贝到剪贴板中、将选取内容轻易拷贝到m文件中。
机电动力系统Matlab分析举例
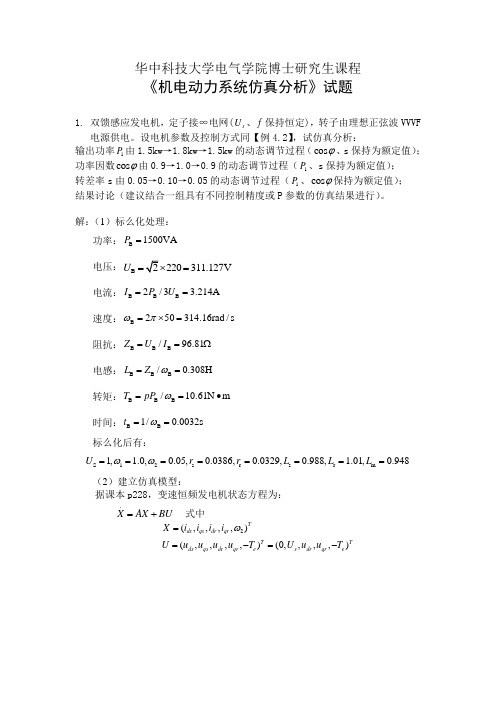
华中科技大学电气学院博士研究生课程《机电动力系统仿真分析》试题1. 双馈感应发电机,定子接∞电网(s U 、f 保持恒定),转子由理想正弦波VVVF 电源供电。
设电机参数及控制方式同【例4.2】,试仿真分析: 输出功率1P 由1.5kw →1.8kw →1.5kw 的动态调节过程(cos ϕ、s 保持为额定值); 功率因数cos ϕ由0.9→1.0→0.9的动态调节过程(1P 、s 保持为额定值); 转差率s 由0.05→0.10→0.05的动态调节过程(1P 、cos ϕ保持为额定值); 结果讨论(建议结合一组具有不同控制精度或P 参数的仿真结果进行)。
解:(1)标么化处理:功率:B 1500VA P =电压:B 220311.127V U == 电流:B B B 2/3 3.214A I P U == 速度:B 250314.16rad /s ωπ=⨯= 阻抗:B B B /96.81Z U I ==Ω 电感:B B B /0.308H L Z ω== 转矩:B B B /10.61N m T pP ω==∙ 时间:B B 1/0.0032s t ω== 标么化后有:S 12s r s r m 1, 1.0,0.05,0.0386,0.0329,0.988, 1.01,0.948U r r L L L ωω========(2)建立仿真模型:据课本p228,变速恒频发电机状态方程为: .X AX BU =+ 式中2(,,,,)(,,,,)(0,,,,)Tds qs dr qr T Tds qs dr qr e s dr qr e X i i i i U u u u u T U u u T ω==-=-512123434550000001000000000000100000r m r m m sm s s r r ms r r m s mr s s mr s qrdr L L L L B L L L L b r L a r L a a r L a r L A r L a r L a a r L a r L a i a i -⎡⎤⎢⎥-⎢⎥⎢⎥=-Λ⎢⎥-⎢⎥⎢⎥⎣⎦-⎡⎤⎢⎥-⎢⎥⎢⎥=-⎢⎥Λ-⎢⎥⎢⎥-⎣⎦221122123122412555()()1.5s r m s r m r m s m m s r m L L L a L L L a L L a L L a L L L a pL b pb JωωωωωωωωΛ=-=-=-=-=-==Λ 设实施动态调控前电机以速度0r ω稳态运行,定子电压、频率、输出功率和功率因数分别为0s U 、10ω、10P 和0cos ϕ,则初始条件确定如下:1000000000001000000101000000102010023cos sin cos sin cos cos sin s s ds s qs s s s s s s dr ms s s s qr mr P I U i I i I U L I r I i L L I r I i L ϕϕϕωϕϕωωϕϕωωωω===++=-==-取q 轴与定子电压矢量重合, 0ds qs su u U ==控制指令值为1***11*11**21*****2*****2**/(1.5cos )sin cos (sin cos )/()(cos sin )/()()()1.5(s s ds s qs s dr s s s s s m qr s s s s m r dr r dr m qs r qr qr r qr r dr m ds m m qs dr ds I P U i I i I i U L I r I L i L I r I L u r i L i L i u r i L i L i T pL i i i ϕϕϕωϕϕωωϕϕωωωωωω====++=-=-=+-=+-=-**)qr i转子电压的动态控制控制方程: *****222*****222()()dr dr m qs r dr r qr m qs r qr qr qrmds r dr r qr r drm dsu u L i r i L i L i L i u u L i L i r i L i L i ωωωωωω=+∆+∆-∆+-∆=-∆+∆+∆+-∆式中,各状态变量的增量统一定义为:*x x x ∆=- 2(,,,,)ds qs dr qr x i i i i ω= (3)仿真模型建立及仿真结果:根据上述数学模型编写S-function ,建立a )的仿真模型如下:图1-1(a )仿真结果:图1-21(cos 、s保持为额定值)同样的方法建立系统b)、c)的仿真模型,仿真过程如下:仿真结果:图1-4 cos 由0.8→0.9→1.0→0.9→0.8的动态调节过程P、s保持为额定值)(1仿真结果:图1-6 s 由0.05→0.1→0.15→0.10→0.05的动态调节过程(1P 、cos ϕ保持为额定值,P =500)图1-7 s 由0.05→0.1→0.15→0.10→0.05的动态调节过程(1P 、cos ϕ保持为额定值,P =1000)图1-8 s由0.05→0.1→0.15→0.10→0.05的动态调节过程P、cos 保持为额定值,P=1500)(1(4)结果讨论:以转差率的动态响应为例来分析P参数对系统动态及稳态性能的影响。
(完整版)MATLAB)课后实验答案[1]
![(完整版)MATLAB)课后实验答案[1]](https://img.taocdn.com/s3/m/a428921bf524ccbff12184eb.png)
实验一 MATLAB 运算基础1.先求下列表达式的值,然后显示 MATLAB 工作空间的使用情 况并保存全部变量解:4.完成下列操作:(1) 求[100,999] 之间能被21整除的数的个数。
(1) z i 2sin 85° 1 e 2Z 2 卯(x L),其中x2 0.45 2i 5Z 3 0.3a 0.3a e e 2sin (a 0.3)3.0, 2.9,L ,2.9, 3.0 Z 4t 2t 2 t 2 1 2t 其中 t=0:0.5:2.5(2) 建立一个字符串向量,删除其中的大写字母。
解: (1)结果:m=100:999;n=fin d(mod(m,21)==0);len gth( n)ans =43(2).建立一个字符串向量例如:ch二'ABC123d4e56Fg9:则要求结果是: ch二'ABC123d4e56Fg9:k=fi nd(ch>='A'&ch<='Z'); ch(k)=[] ch =123d4e56g9 实验二MATLAB 矩阵分析与处理1.设有分块矩阵A E 3 3 °2 3 R 3 2S 2 2 ,其中E 、R 、0、S 分别为单位矩阵、随机矩阵、零矩阵和对角阵,试通过数值计算验证A 2 E R RS 0 S 22 3 4 1 1 1 3 4 5 1 1 1 4 5 6 x , 0.95 x 2 0.67 x 3 0.52(1) 求方程的解。
(2) 将方程右边向量元素 b 3改为0.53再求解,并比较 b 3的变化和解的相对变化。
(3)计算系数矩阵A 的条件数并分析结论。
解:M 文件如下: 解:M 文件如下; 5.下面是一个线性方程组:实验三选择结构程序设计1. 求分段函数的值。
x2x 6 x 0且x 3y x2 5x 6 0 x 5且x 2 及x 3x2x 1 其他用if语句实现,分别输出x=-5.0,-3.0,1.0,2.0,2.5,3.0,5.0 时的y值。
MATLAB语言与控制系统仿真-参考答案-第8章

MATLAB语言与控制系统仿真-参考答案-第8章8.6 控制系统的Simulink仿真实训8.6.1实训目的:1.学会运用Simulink进行系统仿真;2.了解子系统的创建方法及简单应用;3.运用Simulink实现混沌控制系统的仿真;4.运用Simulink实现伺服跟踪系统等系统的仿真;8.6.2实训内容:1.按照图8-39所示建立系统的结构图文件。
图8-39(1)K=50,纪录图示三处的波形,分析系统的稳态性并给出稳态误差。
仿真文件:sx8620101.mdl系统稳定,稳态误差为0;(2)K=200,纪录图示三处的波形,根据曲线分析系统的稳定性。
仿真文件:sx8620102.mdl由输出曲线可以看出闭环系统不稳定;(3)编写程序求取K=200时的闭环传递函数,求出系统的闭环极点(特征根),说明系统的稳定性,分析与(2)得出的结论是否一致。
%实训8620103.mn1=3;d1=[1,2];[n2,d2]=cloop(n1,d1);sysa=tf(n2,d2);sysb=tf([200],[1,0])*tf([1],[1,5]);sysc=sysa*sysb/(1+sysa*sysb);[nc,dc]=tfdata(sysc,'v');roots(dc)>> ans =-12.0549 1.0275 + 6.9797i 1.0275 - 6.9797i -5.0000 + 0.0000i -5.0000 - 0.0000i有两个特征根在右半平面,闭环系统不稳定;与(2)得出的稳定性结论一致。
2. 子系统创建实验(1)建立如下系统。
(2)选定范围,创建子系统并定义变量a 。
图8-40(3)利用创建的子系统,分别记录10,8,6,4,2 a 时所示系统的输出波形。
a=2a=4a=6a=8a=103.已知四维混沌系统的运动方程如下,试用Simulink 进行仿真。
+-=+-=-+=+-=321444213343121243212110)(10)(35x x x x xx x x x x x x x x x xx x x x x x (1)四个积分器的初始值自定,建议在(0.01,3.0)范围内随机给出。
matlab课后答案完整版

matlab课后答案完整版ones表⽰1矩阵zeros表⽰0矩阵ones(4)表⽰4x4的1矩阵zeros(4)表⽰4x4的0矩阵zeros(4,5)表⽰4x5的矩阵eye(10,10)表⽰10x10的单位矩阵rand(4,5)表⽰4x5的伴随矩阵det(a)表⽰计算a的⾏列式inv(a)表⽰计算a的逆矩阵Jordan(a)表⽰求a矩阵的约当标准块rank(a)表⽰求矩阵a的秩[v,d]=eig(a)对⾓矩阵b=a’表⽰求a矩阵的转置矩阵sqrt表⽰求平⽅根exp表⽰⾃然指数函数log⾃然对数函数abs绝对值第⼀章⼀、5(1)b=[97 67 34 10;-78 75 65 5;32 5 -23 -59]; >> c=[97 67;-78 75;32 5;0 -12]; >> d=[65 5;-23 -59;54 7];>> e=b*ce =5271 11574-11336 6641978 3112(2)a=50:1:100⼆、1 、x=-74;y=-27;z=(sin(x.^2+y.^2))/(sqrt(tan(abs(x+y)))+pi) z =-0.09012、a=-3.0:0.1:3.0;>> b=exp(-0.3*a).*sin(a+0.3)y =0.7218 1.0474-0.2180 1.15624、a*b表⽰a矩阵和b矩阵相乘a.*b表⽰a矩阵和b矩阵单个元素相乘A(m,n)表⽰取a矩阵第m⾏,第n列A(m,:)表⽰取a矩阵第m⾏的全部元素A(:,n)表⽰取a矩阵的第n列全部元素A./B表⽰a矩阵除以b矩阵的对应元素,B.\A等价于A./BA.^B表⽰两个矩阵对应元素进⾏乘⽅运算A.^2表⽰a中的每个元素的平⽅A^2表⽰A*A例:x=[1,2,3];y=[4,5,6];z=x.^yz=1 32 729指数可以是标量(如y=2).底数也可以是标量(如x=2)5、a=1+2i;>> b=3+4i;>> c=exp((pi*i)/6)c =0.8660 + 0.5000id=c+a*b/(a+b)d =1.6353 + 1.8462i第⼆章⼆、4、(1)y=0;k=0;>> while y<3k=k+1;>> display([k-1,y-1/(2*k-1)])ans =56.0000 2.9944第三章⼆1(1) x=0:pi/10:2*pi; >> y=x-x.^3/6; >> plot(x,y)1234567-40-35-30-25-20-15-10-505(2)x=0:pi/10:2*pi; y=(exp(-x.^2/2))/2*pi;plot(x,y)012345670.20.40.60.811.21.41.6(3)x=-8:0.01:8; y=sqrt((64-x.^2)/2);plot(x,y)-8-6-4-2024680123456(4)t=0:0.1:8*pi; >> x=t.*sin(t); >> y=t.*cos(t);-25-20-15-10-50510152025-30-20-10102030例3.4x=0:pi/100:2*pi; y1=exp(-0.5*x);y2=exp(-0.5*x).*sin(2*x); plot(x,y1,x,y2)>> title('x from 0 to 2{\pi} '); >> xlabel('variable x'); >> ylabel('variable y'); >> text(1.5,0.5,'曲线y1=e^(-0.5x)'); >> text(3,0.1,'曲线y2=cos(4{\pi}x)e^{-0.5x}'); >> legend('y1','y2')1234567-0.4-0.20.20.40.60.81x from 0 to 2πvariable xv a r i a b l e y曲线y1=e (-0.5x)曲线y2=cos(4πx)e -0.5xy1y22、(1)y1=2*x-0.5;t=linspace(0,pi,100); x=sin(3*t).*cos(t); y=sin(3*t).*sin(t);>> k=find(abs(y-x)<1e-2); >> t1=t(k) t1 =0 0.7933 1.04722.0944>> z=sin(3.*(t1)).*cos(t1) z =0 0.4841 0.0000 0.0000 -0.0000>> plot(t,x,t,y,'k:',t1,z,'bp');0.511.522.533.5-1-0.8-0.6-0.4-0.200.20.40.60.81(2)subplot(1,2,1); >> scatter(x1,y1,10); >> title('y=2x-0.5'); >> subplot(1,2,2); >> scatter(x,y,10)-1-0.8-0.6-0.4-0.200.20.40.60.81-1-0.8-0.6-0.4-0.200.20.40.63、subplot(1,2,1); x=0:0.01:pi; y=sin(1./x); plot(x,y)subplot(1,2,2);fplot('sin(1./x)',[1,100])1234-1-0.8-0.6-0.4-0.200.20.40.60.81204060801000.10.20.30.44、t=0:pi:2*pi; y=1./(1+exp(-t));subplot(2,2,1);%图形窗⼝的分割bar(t,'group'); %绘制柱形图(分组) subplot(2,2,2);barh(t,'stack');%绘制柱形图(堆积) subplot(2,2,3);loglog(t,y); %函数使⽤全对数坐标,x,y 均采⽤常⽤对数刻度 subplot(2,2,4); semilogy(t,y); %函数使⽤半对数坐标,y 轴为常⽤对数刻度,x 轴仍为线性刻度1230246802468123100.5100.710-0.01810-0.0010246810-0.310-0.210-0.15、(1)theta=linspace(-pi,pi,100); ro=5.*cos(theta)+4; polar(theta,ro); (2)x=linspace(0,2*pi,100);a=1>> r=a.*(1+cos(x)); polar(x,r);3021060240902701203001503301806、(1)t=0:pi/10:2*pi;>> x=exp((-t)/20).*cos(t); >> y=exp((-t)/20).*sin(t); >> z=t; >> plot3(x,y,z);-1-0.50.51-1-0.50.5102468(2)t=0:0.01:1; x=t;>> y=t.^2; >> z=t.^3;>> plot3(x,y,z);0.20.40.60.800.20.40.60.817、x=-30:0.1:0; >> y=0:0.1:30;>> [x,y]=meshgrid(x,y); >>z=10.*sin(sqrt(x.^2+y.^2))./sqrt(1+x.^2+y.^2);>> meshc(x,y,z);绘制曲⾯图和等⾼线-30-20-10102030-4-202468、x=linspace(-3,3,100); >> y=linspace(-3,3,100); >> [x y]=meshgrid(x,y); %可以将向量转化为矩阵 >> fxy=-5./(1+x.^2+y.^2); >> i=find(abs(x)<=0.8 & abs(y)<=0.5); >> fxy(i)=NaN; >>surf(x,y,fxy) %绘制三维曲⾯图-4-224-4-224-4-3-2-19、u=linspace(1,10,100); v=linspace(-pi,pi,100);[u v]=meshgrid(u,v); x=3.*u.*sin(v); y=2.*u.*cos(v); z=4*u.^2; surf(x,y,z); shading interp;-40-20-1010200100200300400第五章⼆1、a=rand(1,30000);mean(a) %求平均数 ans =0.5010 >>b=std(a) %求标准差 b =0.2882 >> c=max(a) c =0.9999 >> d=min(a) d =3.5706e-005size(find(a>0.5))/size(a) %求⼤于0.5的随机数个数占总数的百分⽐ans =0.50322、h=[466,715,950,1422,1635]; >> w=[7.04,4.28,3.40,2.52,2.13]; >> hh=[500,900,1500]; >> ww=interp1(h,w,hh,'spline')ww =6.4903 3.5226 2.3845 3、x=linspace(1,10,50); y=log(x);f=polyfit(x,y,5); %求曲线的拟合 >> yy=polyval(f,x); >> plot(x,y,'r-',x,yy,'g.') 123456789100.511.522.55、(1)、(2) p1=[1,2,0,7]; p2=[1,-2]; p3=[1,0,5,1]; p12=conv(p1,p2); >>p=p12+[zeros(1,size(p12,2)-size(p3,2)),p3]; >> roots(p) ans =-3.4656 0.6128 + 1.6278i 0.6128 - 1.6278i 1.2400-29 291 95 19 -3 697 -13 697 1427 >>y2=polyvalm(p,a)%以矩阵a 为⾃变量 y2 =391 2084 3273 502 2693 4207 720 3775 5892 6、(1)z=fzero('3*x-sin(x)+1',0) %求x=0时附近的根 z =-0.4903 第⼋章⼆、2t=0:pi/20:2*pi; x=sin(t); y=cos(t); x1=sin(7*t); y1=cos(7*t);h=plot(x,y,x1,y1);set(h,'marker','x','linewidth',2); set(gca,'xtick',-1:0.1:1); title('篮筐')-1-0.9-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.100.10.20.30.40.50.60.70.80.91 -1-0.8-0.6-0.4-0.200.20.40.60.81篮筐3、x=0:pi/10:5*pi;y=exp(-0.2*x).*cos(x)+2; h=plot(x,y);set(gca,'color','red','linestyle','-','linewidth',3);text(5,2.4,'y=exp(-0.2*x).*cos(x)+2');02468101214161.41.61.822.22.42.62.83y=exp(-0.2*x).*cos(x)+24、t=-pi:pi/100:pi; x=cos(t); y=sin(t); z=t;h=plot(t,x,t,y,t,z);set(h,'linestyle','-','linewidth',3);-4-3-2-101234-4-3-2-101234字符串例ch='Welcome to Beijing';subch=ch(12:18) 选12~18个字符串(空格也算)ans =WELCOME TO BEIJING >> length(k)统计⼩写字母的个数ans = 14 例:已知y=1-1/2+1/3-1/4.........-1/100求y 的值y=0; >> n=100; >> for i=1:100; y=y+(-1)^(i-1)/i; end>> disp(y)0.6882绘制⼆维曲线图x=0:pi/100:2*pi; >> y1=0.2*exp(-0.5*x).*cos(4*pi*x); >> y2=1.5*exp(-0.5*x).*cos(pi*x); >> plotyy(x,y1,x,y2); 7-0.20.20123456-202绘制三维图像例:x=sint+tcost y=cost-tsint z=tt=0:pi/10:10*pi; x=sin(t)+t.*cos(t); y=cos(t)-t.*sin(t); z=t; plot3(x,y,z); axis([-30 30 -30 30 0 35]); 坐标轴的最⼤值与最⼩值title('line in 3-D space'); 图形的题⽬ >> xlabel('x');ylabel('y');zlabel('z'); 标注坐标>> grid on; 加⽹格线 -30-20-10102030-20205101520253035xline in 3-D spaceyz三维例]2/,0[],,0[,cos sin 22ππ∈∈+=y x y x z [x,y]=meshgrid(0:pi/100:pi,0:pi/100:pi/2);>> z=sin(x.^2)+cos(y.^2);>> mesh(x,y,z);>> axis([0 4 0 1.8 -1.5 1.5]); 012340.511.5-1.5-1-0.500.511.5例3.16t=0:pi/20:2*pi; subplot(1,2,1);[x,y,z]=cylinder(sin(t),30);surf(x,y,z); 绘制三维曲⾯图subplot(1,2,2);>> [x,y,z]=peaks(100);>> mesh(x,y,z); 绘制三维⽹格图-11-10100.20.40.60.81-55-505-10-5510多项式求导例:f(x)=1/x^2+5 p=[1];>> q=[1,0,5];>> [p,q]=polyder(p,q)注:c=conv(a,b) 表⽰a 多项式与b 多项式乘积[p,r]=deconv(a,b) 表⽰a 多项式与b 多项式相除其中p 为商向量 r 为余数向量p=polyder(p) 表⽰求p 的导数 p=poleder(p,q) 表⽰求p 乘以q 的导数[p,q]=poleder(p,q) 表⽰p 除以q 的导数多项式求根例:f(x)=2x^4-12x^3+3x^2+5 p=[2,-12,3,0,5]; >> x=roots(p); >> p=[2,-12,3,0,5]; x=roots(p) 求⽅程f(x)=0的根 x =5.7246 0.8997 -0.3122 + 0.6229i -0.3122 - 0.6229i>> g=poly(x) 已知多项式的根求多项式 g =1.0000 -6.0000 1.5000 -0.00002.5000符号求导例7.3x=a(t-tsint)y=b(1-cost) 求y 对x 的⼀阶导数 syms x y a b t;>> f21=a*(t-sin(t)); >> f22=b*(1-cos(t));>> diff(f22)/diff(f21) 求y 对x 的⼀阶导数ans =b*sin(t)/a/(1-cos(t))注:diff(f1,x,2) 表⽰f1对x 的⼆阶导数diff (f3,x )表⽰z 对x 的偏导 diff (f3,y )表⽰z 对y 的偏导求不定积分int(f) 求f 的不定积分 f1=int(f,a,b) 求f 在a ,b 之间的定积分eval (f1)计算积分值符号求极限例7.2 syms x h>> f=(sin(x+h)-sin(x))/h;>> limit(f,h,0) h 趋向于0ans =cos(x)例2f=sym('(1+t/x)^x');limit(f,inf) f趋向于⽆穷ans =exp(t)例3f=sym('x*(sqrt(x^2+1)-x)');limit(f,sym('x'),inf,'left') x 趋向于正⽆穷ans =1/2⼤⼩写ch='Welcome to Beijing';subch=ch(12:18)subch =Beijing>> k=find(ch>='A'&ch<='Z'); ch(k)=ch(k)-('A'-'a');>> char(ch)ans =welcome to beijing>> length(k)ans =2。
MATLAB语言与控制系统仿真-参考答案-第5章

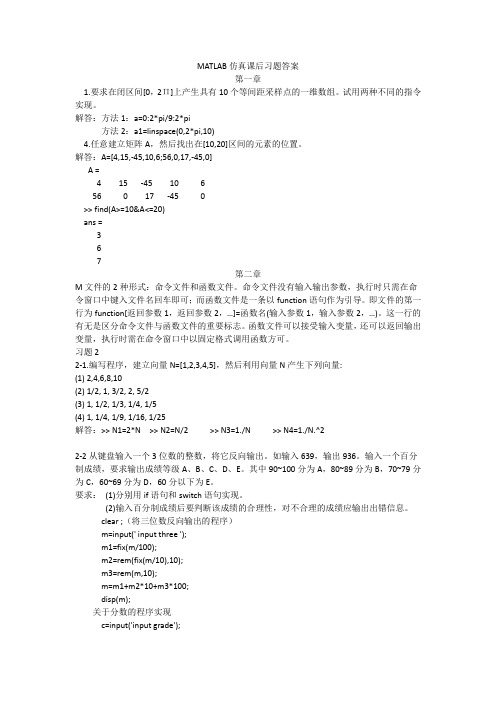
Q 1/ illI ! I I105115 22.533.5Time (sec)» n2=16;» d2=[124J6J; » sys2=tf(n2,d2); » step(sys2)5.6控制系统的时域响应MATLAB 仿真实训561实训目的 1. 学会利用MATLAB 绘制系统的单位阶跃响应曲线,掌握读取系统动态性能指标的方法 2. 牟会利用MATLAB 绘制系统的单位脉冲响应曲线的方法: 3. 掌握利用MATLAB 绘制系统的零输入响应曲线的方法; 4. 掌握利用MATLAB 绘制系统的一般输入响应曲线的方法: 5. 学会通过仿貞•曲线读取相关信息,并依据有关信息进行系统的时域分析。
562实训内容 1 •编写程序求取下列各系统的单位阶跃响应.完成表5・5并记录相关曲线。
16 + 3.2$ + 16G 4(S )=16 + 2・4s + 16 —、16 °3(巧=一————s +1.6$ + 16 解:»nl=16; »dl 二[1,3.2,16]; » sysl=tf(nl,dl); » step(sysl) 16S 2 +5 + 16141.2Step Response;i 2%误差帝;G1(S )=16/(S 2+42S +16)» n3=16; »d3=[l,1.6J6]; » sys3=tf(n3,d3); » step(sys3),Sy 湎为汨 I F^ak ampflude: 153• Ci ver 曲 tri 〔粉 52.7I JiitifTe (secjos027 IIJ I I Q > I I || |1|'01234567Tin»(sec)»n4=16; » d4=[l,lJ6]; » sys4=tf(n4,d4); » step(sys4)1.42<19 卑Response?I驴2'阳吐8137 1OQoct 卿 372;Ai tire (S€cJ 0 623G2(沪恸(52+2^+16)S •战 em. sr$2 s“n 】g Tiw (sec) 2.6i022.5 Tirw (sec)9 卑 RespondG3(s)=1B/(s2+1 6s+16)Systerc 幼仝3seflirgime ($ec ):矽序号Cmax◎ △ = 5%)计算值实验计算值实验计算值实验值1 0.441.25刘 1.25 0退湖 0.8632.W75 2.12 0341 3723 1.37 0.^233 0.828 2.9167 2.813 0.241.5266 1.53 0^016 0.8 4.3750 4.940」2541.6731 1.67 0*16 0.803 7.0000 733w=4;cmax 1 = 1 +exp(-z 1 *pi/sqrt( 1 -z 1A 2)); tpl =pi/(w*sqrt(l -z 1A 2)); tsl=3.5/(zl*w); [cmaxktpLtsl] ans =1.2538 0.85692.1875 » z2=0.3; w=4;cmax2= 1 +exp(-z2*pi/sqrt(l -z2A 2)); tp2=pi/(w*sqrt(l -z2A 2)); ts2=3.5/(z2*w); [cmax2,tp2,ts2] ans =q 6 T ITO (s€«)8 10 12(2)(4) 3.5 (以5%为误差带) 4.4(以2%为误差带)2•已知二阶系统的闭环传递函数如下,编程求取系统的单位阶跃响应并完成表5・ 6,记录相关曲线。
matlab仿真课后习题
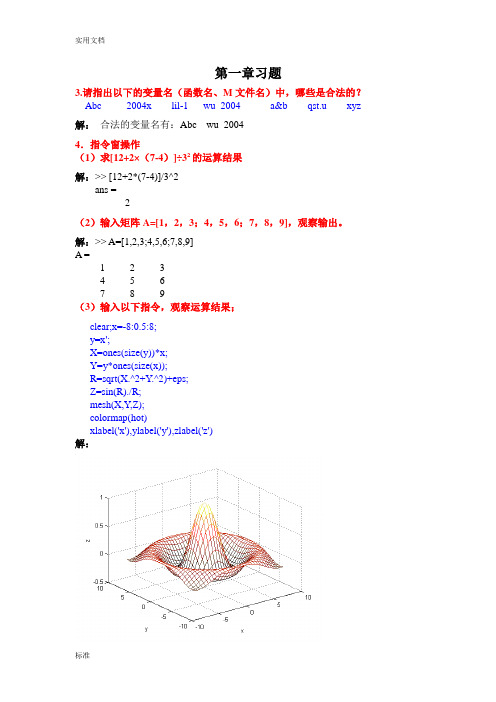
第一章习题3.请指出以下的变量名(函数名、M文件名)中,哪些是合法的Abc 2004x lil-1 wu_2004 a&b _xyz 解:合法的变量名有:Abc wu_20044.指令窗操作(1)求[12+2×(7-4)]÷32的运算结果解:>> [12+2*(7-4)]/3^2ans =2(2)输入矩阵A=[1,2,3;4,5,6;7,8,9],观察输出。
解:>> A=[1,2,3;4,5,6;7,8,9]A =1 2 34 5 67 8 9(3)输入以下指令,观察运算结果;clear;x=-8::8;y=x';X=ones(size(y))*x;Y=y*ones(size(x));R=sqrt(X.^2+Y.^2)+eps;Z=sin(R)./R;mesh(X,Y,Z);colormap(hot)xlabel('x'),ylabel('y'),zlabel('z')解:7.指令行编辑(1)依次键入以下字符并运行:y1=2*sin*pi)/(1+sqrt(5))解:>>y1=2*sin*pi)/(1+sqrt(5))y1 =(2)通过反复按键盘的箭头键,实现指令回调和编辑,进行新的计算;y2=2*cos*pi)/(1+sqrt(5))解:>>y2=2*cos*pi)/(1+sqrt(5))y2 =11.编写题4中(3)的M脚本文件,并运行之。
解:第二章习题1.在指令窗中键入x=1::2和y=2::1,观察所生成的数组。
解:>> x=1::2 x =>> y=2::1 y =Empty matrix: 1-by-02.要求在[0,2π]上产生50个等距采样数据的一维数组,试用两种不同的指令实现。
解: y1=0:2*pi/49:2*pi y2=linspace(0,2*pi,50)3.计算e -2t sint ,其中t 为[0,2π]上生成的10个等距采样的数组。
MATLAB仿真课后习题答案

MATLAB仿真课后习题答案MATLAB仿真课后习题答案第一章1.要求在闭区间[0,2Π]上产生具有10个等间距采样点的一维数组。
试用两种不同的指令实现。
解答:方法1:a=0:2*pi/9:2*pi方法2:a1=linspace(0,2*pi,10)4.任意建立矩阵A,然后找出在[10,20]区间的元素的位置。
解答:A=[4,15,-45,10,6;56,0,17,-45,0]A =4 15 -45 10 656 0 17 -45 0>> find(A>=10&A<=20)ans =367第二章M文件的2种形式:命令文件和函数文件。
命令文件没有输入输出参数,执行时只需在命令窗口中键入文件名回车即可;而函数文件是一条以function语句作为引导。
即文件的第一行为function[返回参数1,返回参数2,…]=函数名(输入参数1,输入参数2,…)。
这一行的有无是区分命令文件与函数文件的重要标志。
函数文件可以接受输入变量,还可以返回输出变量,执行时需在命令窗口中以固定格式调用函数方可。
习题22-1.编写程序,建立向量N=[1,2,3,4,5],然后利用向量N产生下列向量:(1) 2,4,6,8,10(2) 1/2, 1, 3/2, 2, 5/2(3) 1, 1/2, 1/3, 1/4, 1/5(4) 1, 1/4, 1/9, 1/16, 1/25解答:>> N1=2*N >> N2=N/2 >> N3=1./N >> N4=1./N.^2 2-2从键盘输入一个3位数的整数,将它反向输出。
如输入639,输出936。
输入一个百分制成绩,要求输出成绩等级A、B、C、D、E。
其中90~100分为A,80~89分为B,70~79分为C,60~69分为D,60分以下为E。
要求:(1)分别用if语句和switch语句实现。
(2)输入百分制成绩后要判断该成绩的合理性,对不合理的成绩应输出出错信息。
电机与拖动基础及MATALB仿真(陈亚爱 周京华编著)习题答案第5章
直流电机拖动5-6什么是固有机械特性和人为机械特性?试说明他励直流电动机的各种人为机械特件的变化特点。
答:他励直流电动机的固有机械特性是指在电源电压U =U N ,气隙磁通Ф=ФN ,电枢外串电阻R c =0时,n =ƒ(T )的机械特性,2N ae N e T NU R n TC C C 。
人为机械特性:改变电气参数如变电源电压、或变气隙磁通、或变电枢外串电阻时,所得到的机械特性。
(1)电枢回路串电阻时的人为机械特性。
理想空载点n 0与固有机械特性的相同;斜率b 随外串电阻R c 的增大而增大,使特性变软。
(2)改变电枢电源电压时的人为机械特性。
与固有机械特性比,斜率b 不变,即特性硬度没变;特性的理想空载转速n 0随电压的下降而变小,是一簇平行特性。
(3)减弱气隙磁通时的人为机械特性。
与固有机械特性比,斜率β随磁通Ф减少而增大,特性变软;特性的理想空载转速n 0随气隙磁通Ф减弱而增大,特性上移。
5-7直流电动机起动有哪些要求?直流电动机常用的起动方法有哪些?各种起动方法的主要特点是什么?为什么一般直流电动机不能采用直接起动?答:直流电动机起动要求:①起动电流的大小合适,(1.5 2.0)s N I I ;②起动转矩的大小合适,(1.1 1.2)T s L T ;③起动时间的长短合适;④起动过程的平稳性好;⑤起动过程的经济性好。
直流电动机常用起动方法:1)直接起动。
起动电流大,为额定电流I N 的10~20倍,造成换向困难,严重时出现环火;引起电网电压的波动,影响接于同一电网的其他用电设备的正常运行;过大的起动电流产生过大的起动转矩,使传动机构受冲击,易造成设备损坏。
故不宜直接起动。
2)减压起动。
起动平稳,起动过程中能量损耗小,可实现软起动,实现无级起动;缺点:需一套专用调压设备,投资大。
3)电枢回路串电阻起动。
设备简单,操作方便;缺点:起动过程中能量损耗大,是有级起动,不适用于频繁起动的场合。
matlab课后习题答案(1-9章)要点

1 数字1.5e2,1.5e3 中的哪个与1500相同吗?1.5e32 请指出如下5个变量名中,哪些是合法的?abcd-2xyz_3 3chan a 变量ABCDefgh 2、5是合法的。
3 在MATLAB 环境中,比1大的最小数是多少? 1+eps4 设 a = -8 , 运行以下三条指令,问运行结果相同吗?为什么?w1=a^(2/3) w2=(a^2)^(1/3) w3=(a^(1/3))^2w1 = -2.0000 + 3.4641i ;w2 = 4.0000 ;w3 =-2.0000 + 3.4641i 5 指令clear, clf, clc 各有什么用处?clear 清除工作空间中所有的变量。
clf 清除当前图形。
clc 清除命令窗口中所有显示。
第二章1 说出以下四条指令产生的结果各属于哪种数据类型,是“双精度”对象,还是“符号”符号对象?3/7+0.1双; sym(3/7+0.1)符; sym('3/7+0.1') 符;; vpa(sym(3/7+0.1)) 符;2 在不加专门指定的情况下,以下符号表达式中的哪一个变量被认为是自由符号变量. sym('sin(w*t)'),sym('a*exp(-X)'),sym('z*exp(j*th)') symvar(sym('sin(w*t)'),1) w a z3 (1)试写出求三阶方程05.443=-x 正实根的程序。
注意:只要正实根,不要出现其他根。
(2)试求二阶方程022=+-a ax x 在0>a 时的根。
(1)reset(symengine)syms x positive solve(x^3-44.5) ans =(2^(2/3)*89^(1/3))/2(2)求五阶方程022=+-a ax x 的实根 syms a positive %注意:关于x 的假设没有去除 solve(x^2-a*x+a^2)Warning: Explicit solution could not be found. > In solve at 83 ans =[ empty sym ]syms x clear syms a positivesolve(x^2-a*x+a^2) ans =a/2 + (3^(1/2)*a*i)/2 a/2 - (3^(1/2)*a*i)/24 观察一个数(在此用@记述)在以下四条不同指令作用下的异同。
MATLAB仿真 课后习题
第一章习题3.请指出以下的变量名(函数名、M文件名)中,哪些是合法的?Abc 2004x lil-1 wu_2004 a&b qst.u _xyz 解:合法的变量名有:Abc wu_20044.指令窗操作(1)求[12+2×(7-4)]÷32的运算结果解:>> [12+2*(7-4)]/3^2ans =2(2)输入矩阵A=[1,2,3;4,5,6;7,8,9],观察输出。
解:>> A=[1,2,3;4,5,6;7,8,9]A =1 2 34 5 67 8 9(3)输入以下指令,观察运算结果;clear;x=-8:0.5:8;y=x';X=ones(size(y))*x;Y=y*ones(size(x));R=sqrt(X.^2+Y.^2)+eps;Z=sin(R)./R;mesh(X,Y,Z);colormap(hot)xlabel('x'),ylabel('y'),zlabel('z')解:7.指令行编辑(1)依次键入以下字符并运行:y1=2*sin(0.3*pi)/(1+sqrt(5))解:>>y1=2*sin(0.3*pi)/(1+sqrt(5))y1 =0.5000(2)通过反复按键盘的箭头键,实现指令回调和编辑,进行新的计算;y2=2*cos(0.3*pi)/(1+sqrt(5))解:>>y2=2*cos(0.3*pi)/(1+sqrt(5))y2 =0.363311.编写题4中(3)的M脚本文件,并运行之。
解:第二章习题1.在指令窗中键入x=1:0.2:2和y=2:0.2:1,观察所生成的数组。
解:>> x=1:0.2:2 x =1.0000 1.2000 1.4000 1.6000 1.80002.0000 >> y=2:0.2:1 y =Empty matrix: 1-by-02.要求在[0,2π]上产生50个等距采样数据的一维数组,试用两种不同的指令实现。
MATLAB仿真课后习题答案
MATLAB仿真课后习题答案第一章1.要求在闭区间[0,2Π]上产生具有10个等间距采样点的一维数组。
试用两种不同的指令实现。
解答:方法1:a=0:2*pi/9:2*pi方法2:a1=linspace(0,2*pi,10)4.任意建立矩阵A,然后找出在[10,20]区间的元素的位置。
解答:A=[4,15,-45,10,6;56,0,17,-45,0]A =4 15 -45 10 656 0 17 -45 0>> find(A>=10&A<=20)ans =367第二章M文件的2种形式:命令文件和函数文件。
命令文件没有输入输出参数,执行时只需在命令窗口中键入文件名回车即可;而函数文件是一条以function语句作为引导。
即文件的第一行为function[返回参数1,返回参数2,…]=函数名(输入参数1,输入参数2,…)。
这一行的有无是区分命令文件与函数文件的重要标志。
函数文件可以接受输入变量,还可以返回输出变量,执行时需在命令窗口中以固定格式调用函数方可。
习题22-1.编写程序,建立向量N=[1,2,3,4,5],然后利用向量N产生下列向量:(1) 2,4,6,8,10(2) 1/2, 1, 3/2, 2, 5/2(3) 1, 1/2, 1/3, 1/4, 1/5(4) 1, 1/4, 1/9, 1/16, 1/25解答:>> N1=2*N >> N2=N/2 >> N3=1./N >> N4=1./N.^22-2从键盘输入一个3位数的整数,将它反向输出。
如输入639,输出936。
输入一个百分制成绩,要求输出成绩等级A、B、C、D、E。
其中90~100分为A,80~89分为B,70~79分为C,60~69分为D,60分以下为E。
要求:(1)分别用if语句和switch语句实现。
(2)输入百分制成绩后要判断该成绩的合理性,对不合理的成绩应输出出错信息。