高炉鼓风机自动控制系统
安阳钢铁高炉汽轮鼓风机自动控制应用
科技信息2008年第27期SCIENCE&TECHNO LO GY INFORMATION1.前言随着安阳钢铁向千万吨级钢铁强厂步伐的迈进,2200m3高炉生产是否顺畅对公司产量有着举足轻重的作用,而汽轮鼓风机组是高炉生产工艺的关键设备,机组是否能稳定运行就显得极其重要。
AV80机组用的是陕西鼓风机厂的风机,带动它转动的是杭州汽轮机厂的汽轮机。
控制系统方面,采用施奈德的Quantum过程控制系统。
2.连锁、控制原理现将汽轮风机运行时连锁控制程序作如下说明。
2.1润滑油交流油泵启、停连锁油压低(压力开关三取一)或手动按启动按钮并且泵在自动位置方可启动交流泵;油压高于0.12M Pa,转速在3690~4305之间,泵在自动位置,手动按停止按钮,这四个条件同时满足可停泵;或泵离开自动位置也可停泵。
2.2润滑油直流油泵启、停连锁润滑油直流油泵启、停连锁条件与上面润滑油交流油泵启、停连锁条件相同。
2.3动力油泵启、停连锁动力油泵启、停连锁条件与润滑油交流油泵启、停连锁条件相同。
唯一不同的是动力油泵停止没有转速正常(3690-4305)和压力高停泵。
2.4防喘调节防喘阀调节采用的是单回路PID调节系统。
调节器为下位机编程软件中功能块,主要参数有风机排气压力测量值、给定值、PID值和调节量程。
设定值的确定:风机在运行前都要做喘振线,坐标系的横坐标为风机喉差,纵坐标为风机排气压力,喘振线就是这个坐标系中的一根曲线。
即取风机在临近喘振时的五个排气压力点,确定与之相对应的五个风机吼差,便在坐标系中找到这五个点并连成线,这就是防喘线。
风机进气温度%400214测值范围是≥-10℃而≤50℃,风机吼差1% 400104经温度补正(1.2+273.15)×%400104/(%400214+273.15)后输出%400402,%400402经功能块运算后输出%400404,%400404×0.9后得到调节线%400410,此值就是防喘调节的设定值,即风机排气压力设定值。
浅析炼铁高炉的自动控制系统

C omputer automation计算机自动化浅析炼铁高炉的自动控制系统高永强摘要:随着我国经济的不断发展,社会生产对于钢铁材料的需求也在逐年不断增加。
钢铁行业作为我国的重工业,在钢铁行业的发展过程中,传统的炼铁高炉控制系统已经不能满足实际的工作需求,为有效推动我国钢铁企业产能和产品质量的提高,为钢铁行业的发展能跟上时代的步伐,本文将主要对高炉工艺及炼铁高炉的自动控制系统概述,来进一步分析炼铁高炉的自动控制系统的应用要点和组成。
关键词:炼铁;高炉;自动控制系统众所周知,炼铁是钢铁材料生产过程中的核心部分,而随着我国科学技术的不断发展,人们对钢铁企业的产品质量和生产能力也提出了更高的要求,传统的生产模式已然不能符合时代的发展需求,炼铁作为钢铁企业生产过程中不可忽视的重要环节,在钢铁企业的炼铁生产过程中只有保障高炉的高效运行和不停滞状态外,相关的工作人员还需注意高炉生产过程中的高温和工艺的复杂性,为提高运行的效率和保障生产的安全,钢铁企业应当重视对炼铁高炉自动控制系统的应用。
1 高炉工艺及炼铁高炉的自动控制系统概述1.1 高炉工艺概述高炉运行时通过将焦炭和铁矿石球团混合在一起,并通过氧化还原反映生成生铁和其他的物质,其具体的操作是从装料开始,将炉料从炉顶装入高炉内,然后将热风炉加热到1000℃以上,让热风通过鼓风机形式送入高炉,再经过燃烧的焦炭形成高温的还原气体后将加热缓慢下降的炉料,还原铁矿球团后成铁。
另炉内得铁矿石到达一定的温度时,还会熔化成铁水滴落,这时铁矿石中的其他物质转化为铁渣,形成铁渣分离的状态。
1.2 炼铁高炉的自动控制系统概述自动控制系统是指其运行主要通过PLC 控制系统、监控仪表、远程控制系统、电气系统等对企业的生产进行自动化控制的过程。
在钢铁企业的发展过程中,当前所有大型现代化炼铁高炉都是通过应用仪表检测控制系统、电气自动控制系统和计算机监控管理系统来实现高炉的自动控制炼铁生产,其中仪表检测控制系统和电气自动控制系统是由PLC或DCS系统完成,在其安装费用不会超过规定的预算范围的基础上,以满足提高高炉炼铁效率和保障生产安全的特定的要求。
高炉热风炉全自动控制专家系统

1 —混风切断阀;2 —热风温度调节阀;3 —烟道阀;4 —冷风切断阀;5 —冷风旁通阀;6 —冷风调节阀; 7 —排风阀;8 —废气阀;9 —助燃空气燃烧阀;10 —助燃空气调节阀;11 —热风阀;12 —煤气燃烧阀; 13 —煤气切断阀;14 —煤气调节阀;15 —煤气放散阀;16 —倒流休风阀;17 —放风阀;18 —烟气进预热器阀; 19 —烟气进烟道阀;20 —助燃空气阀;21 —预热器进口切断阀;22 —预热器出口切断阀;23 —助燃空气旁通阀
2002 年7 月
控制工程
Jul . 2 0 0 2
第9 卷 第4 期
Control engi neeri ng of Chi na
Vol .9 ,No .4
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
文章编号:1005- 3662(2002 )04- 0057- 06
度恒定是借助于控制先行炉和后行炉的风量比例 燃烧预热的高炉煤气和预热空气的热风炉来说将
(控制其冷风调节阀开度)来达到的。
现代高炉都是大型化高炉,如宝钢,高炉容积
超过4 000 m3 ,每昼夜生产生铁达10 000 t ,要求热 风炉稳定地提供规定风温和风量的热风,热风炉也
是耗能大的设备,故其有效操作是至关重要的。
当然,人工控制,不但需要专人操作,且难以 在热风炉整个燃烧时期各个阶段及时设定煤气和 助燃空气流量(鞍钢10 号大型高炉的热风炉在整 个燃烧时期煤气和助燃空气流量均不变),也难以 在预热煤气和空气温度变化时、高炉所需鼓风温 度和流量变化时、助燃空气压力变化时、热风炉蓄 热量尚有富裕时,一一及时修正热风炉加热的煤 气和空气量,因而达不到节能和优化热风炉操作 的目的。故要面对我国的操作和自动化以及维护 水平的实况,而需要开发适合于我国的实际情况 的、且需低成本和便于推广的热风炉全自动化专 家系统。
中钢炼铁1#、4#、5#高炉鼓风机自动拨风系统
中钢炼铁1#、4#、5#高炉鼓风机自动拨风系统摘要:为了解决高炉因鼓风机突然跳闸造成炉膛“坐料”、风口“灌渣”问题关键词:高炉;鼓风机;拨风中钢炼铁1#、4#、5#高炉自2008年投产以来,由于各种原因相继发生鼓风机事故跳闸,造成高炉事故断风,致使高炉风口灌渣事故发生.高炉风口灌渣事故不仅造成更换风口的直接经济损失,如风口设备费和人工费;间接经济损失更惨重,如停产及恢复炉况造成的经济损失。
本文详细介绍了中天钢铁1#、4#、5#高炉的自动拨风系统,论述了该系统的设计思想、系统组成、系统运行情况、plc 系统的硬件与软件构成。
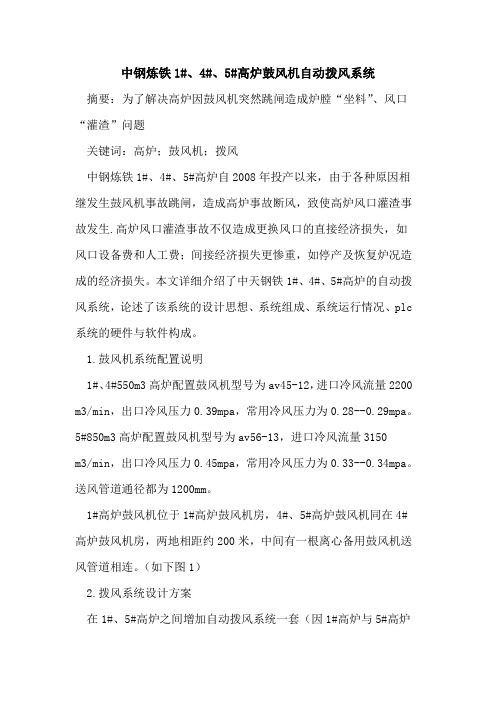
1.鼓风机系统配置说明1#、4#550m3高炉配置鼓风机型号为av45-12,进口冷风流量2200 m3/min,出口冷风压力0.39mpa,常用冷风压力为0.28--0.29mpa。
5#850m3高炉配置鼓风机型号为av56-13,进口冷风流量3150m3/min,出口冷风压力0.45mpa,常用冷风压力为0.33--0.34mpa。
送风管道通径都为1200mm。
1#高炉鼓风机位于1#高炉鼓风机房,4#、5#高炉鼓风机同在4#高炉鼓风机房,两地相距约200米,中间有一根离心备用鼓风机送风管道相连。
(如下图1)2.拨风系统设计方案在1#、5#高炉之间增加自动拨风系统一套(因1#高炉与5#高炉工作压力相差较大,1#高炉向5#高炉拨风时,无法满足两个高炉的最低工作压力,因此只能5#高炉向1#高炉拨风),当1#高炉鼓风机故障跳机时,5#高炉鼓风机通过拨风管道自动往1#高炉冷风系统拨风,使1#高炉不至于风口灌渣,并在一段时间内维持较低的生产压力。
拨风管道可利用1#高炉离心备用风机冷风管道。
在4#、5#高炉之间增加自动拨风系统一套,当4#或5#高炉其中一台鼓风机故障跳机时,4#、5#高炉鼓风机通过拨风管道自动往对方高炉冷风系统拨风,使故障高炉不至于风口灌渣,并在一段时间内维持较低的生产压力。
酒钢2#高炉热风炉自动控制系统的研究和应用
酒钢2#高炉热风炉自动控制系统的研究和应用摘要:酒钢2#高炉在2013年月大修,大修后控制系统采用罗克韦尔ControlLogix系统,该系统是目前较先进的PLC控制系统,具有很强的时序控制和模拟量处理功能。
本文简要介绍了根据热风炉系统工艺要求,实现烧炉、换炉的自动控制,保证了热风炉设备的安全,达到了提高热效率,确保高炉安全稳定生产的目的。
关键词: 热风炉;换炉;自动控制1引言:热风炉的作用是把鼓风机送出的冷风加热到需求的温度,它是根据蓄热原理工作的热交换器。
将高炉布袋除尘器产生的高炉净煤气引入燃烧室进行燃烧,使炉内耐火格子砖加热并蓄热到一定温度后,将冷风经过格子砖加热,最终把热风送至高炉,为高炉提供冶炼所需的稳定风温和风量。
酒钢2#高炉于2013年进行大修,高炉自动控制系统升级改造罗克韦尔ControlLogix系统,热风炉由3座增至4座。
为了增强热风炉送风稳定性,热风炉控制系统的控制操作是至关重要的。
热风炉的操作主要分为烧炉控制和换炉控制两部分。
目前炼铁厂主要依靠有经验的操作工进行手动操作为主,因此研究热风炉控制的重点是烧路炉控制和换炉控制过程中,实现半自动及全部自动化。
2酒钢2#高炉热风炉控制方案分析2.1罗克韦尔PLC控制系统配置与构成酒钢2#高炉控制系统采用罗克韦尔ControlLogix控制器,组成先进适用、可靠的自动控制系统。
在酒钢高炉控制系统中普遍应用,其系统先进适用、稳定可靠、便于维护等优点。
热风炉控制系统选冗余处理器,包括电源、CPU、网络冗余,机架间由CNet 冗余链接。
2.2工艺介绍酒钢2#高炉系统配置4座热风炉(其中2座为内燃式热风炉,2座为顶燃式热风炉),并配置热交换器对热风炉废气预热进行利用,将煤气、助燃空气预热至160-210℃,高炉送风温度约1150-1200℃。
2.3公用系统阀组和单座热风炉阀组酒钢2#高炉热风炉系统公用系统阀门包括:热风炉倒流休风阀、混风切断阀、混风调节阀、预热器阀组、助燃空气放散阀、助燃空气压力调节阀。
高炉鼓风机自动控制系统技术标准及要求

高炉鼓风机自动控制系统技术协议及标准一、自动控制系统对压缩机监测系统主要包括1.压缩机定风量/定风压—静叶串级调节系统根据高炉工艺系统对风量的要求,风机在稳定工作区域内,静叶实时进行自动定位调节适应管网阻力的变化,满足高炉的变工况要求。
2. 压缩机防喘振控制系统喘振是轴流压缩机的固有特性,其对压缩机的危害性也是不言而喻的。
为了防止压缩机进入喘振工况运行,从而设置了此防喘振保护调节系统。
3.压缩机防逆流、安全运行控制系统逆流保护是压缩机喘振的第二道保护措施,当轴流压缩机喉部差压低于设定值时,即视为喘振脉冲信号,如果此信号在规定时间内消失并在某一段时间内不再重复出现时,则只需依靠防喘振系统调节以达到稳定,相反若上述两条件不满足时,即视为逆流发生,机组将投入自保—安全运行程序。
如果逆流持续存在则进行紧急停车。
4. 压缩机组流量、压力、温度常规参数监测系统5. 压缩机组轴振动、轴位移监测保护系统6. 机组轴承温度监测保护系统7. 机组润滑、动力油保护调节系统8. 机组故障报警系统9. 逻辑控制系统10. 机组启动条件联锁11. 机组系统的自动操作12. 机组防逆流及安全运行13. 润滑油泵联锁控制14. 动力油泵联锁控制15. 润滑油站和动力油站电加热器自动控制16. 机组紧急停机联锁保护二、自动控制系统对TRT监测系统主要包括系统设计原则:在确保高炉顶压稳定,高炉正常生产的前提下,最大程度地回收高炉煤气压力潜在能量。
在满足以上原则的基础上,TRT控制系统能实现机组的启动、升速、输出功率、升功率、炉顶压力控制和停机的自动化。
并在TRT 机组启动、升速、升功率、正常停机、紧急停机过程中,与高炉控制系统密切合作,保证高炉炉顶压力的波动在一定范围内。
在TRT机组调节炉顶压力时,在正常炉况时保证顶压波动范围在±3kPa以内。
主要控制功能描述转速控制系统TRT安装三套转速测量系统,高位选择器通过三取二表决选出高信号,作为实际的转速测量值。
(完整word版)高炉热风炉自动控制系统

高炉热风炉自动控制系统1.l 概述1.1.1 研究背景高炉热风炉是给高炉燃烧提供热风以助燃的设备,是一种储热型热交换器。
国内大部分高炉均采用每座高炉带3至4台热风炉并联轮流送风方式,保证任何瞬时都有一座热风炉给高炉送风,而每座热风炉都按:燃烧-休止-送风-休止-燃烧的顺序循环生产。
当一座或多座热风炉送风时,另外的热风炉处于燃烧或休止状态。
送风中的热风炉温度降低后,处于休止状态的热风炉投入送风,原送风热风炉即停止送风并开始燃烧、蓄热直至温度达到要求后,转入休止状态等待下一次送风。
热风炉是一个非线性的、大滞后系统,影响热风炉的因素有很多,并且各种因素相互牵制,因此导致它的控制过程非常复杂,很难用精确的数学模型描述。
用传统的方法建模,使整个控制系统置于模型框架下,缺乏灵活性及应变性,很难胜任对复杂系统的控制。
1.1.2 国内热风炉控制系统现状及存在的问题目前许多钢厂热风炉控制系统采用由可编程控制器(PLC)与过程控制器(或集散系统)分别完成电气与仪表控制的方法进行控制。
例如改造前的广钢3#高炉热风炉采用HONEYWELL S9000过程控制器完成仪表控制,采用西门子S5115U可编程控制器完成换炉控制;莱钢1#750M3高炉热风炉控制系统采用美国MODICON公司的E984-685 PLC完成顺序控制和回路控制;鞍钢10号高炉热风炉采用英国欧陆公司生产的网络6000过程自动化(DCS)控制系统完成热风炉燃烧控制,通过接口与MODICON(PLC)通讯,由PLC完成热风炉自动换炉、送风控制;宝钢1#高炉热风炉电控系统采用日本安川CP-3500H PLC,仪表控制系统采用日本横河CENTUM-CS集散控制系统,上位机采用HP-9000,电气的PLC和仪表的现场控制站间以V-NET 网连接,上位机间通过以太网连接,V-NET网和以太网间通过ACG(通信接口)连接。
这类热风炉存在的问题主要有两方面:(1)基础自动化控制系统设计不合理大都采取用可编程序控制器和过程控制器(或集散系统)分别完成的方法进行控制。
大型高炉鼓风机控制系统概述
三、鼓风机控制系统分析
首钢迁钢AV100-18型高炉鼓风机机组的 系统,由一台同步电机(西门子)、一台 静叶角度可调的轴流风机和各种辅助设备 组成。随着3C(计算机Computer、通信 Communication、控制Control)技术的发展 ,在构建工业生产过程的计算机控制系统 时,普遍利用工业控制计算机、可编程控 制器和测控模块,结合组态软件来实现。
透平式压缩机是一种叶片式旋转机械,可以满足 工业上对气体压缩的各种需要,应用范围广,科学技 术的飞速进步,热力学、气体动力学、机械动力学、 计算机和现代控制等学科的新成就和一些新技术的运 用,透平式压缩机研究成果日新月异。随着中国经济 的快速发展,以及国家节能减排、经济持续发展的国 家战略需求,高炉大型化趋势越加明显。近几年来, 中国4000~5850m3大型高炉陆续建成15座以上。大型 轴流式鼓风机是大型高炉的核心动力供风设备,其安 全可靠、高效节能是用户和制造厂家追求的主要目标 。
Northeastern University
压缩机密封系统
轴流压缩机进气端和压力端通过嵌装 在主槽内的不锈钢拉别令密封片来密封。 平衡盘上装有相同的拉别令密封片,密封 间隙的调整通过调整密封套圆周上的调整 块来实现,具有安装维护方便、事故出现 时候保护主轴等优点,因此轴流压缩机在 长期周期运行过程中,可使密封效果始终 保持在最佳状况。
Northeastern University
调节缸
调节缸由Q235A钢板焊接而成,水平剖 分型,中分面用螺栓联接,具有较高的刚 性。调节缸分四点支撑在机壳上,安装在 机壳与叶片承缸之间,调节缸的作用在于 调节轴流压缩机的各级静叶角度,以满足 变工况下的要求。安装在机壳两侧的伺服 马达在控制系统作用下,通过连接板带动 调节缸做轴向往复运动,从而达到调节静 叶角度的目的。
高炉鼓风机监控系统的设计与应用
高炉鼓风机监控系统的设计与应用【摘要】本文介绍了高炉鼓风机主体设备及炉鼓风机组的工艺流程。
根据高炉鼓风机的控制要求,给出了自动控制系统设计的原理与框架。
实现了风机流量控制与防喘振等核心功能,在风机的安全可靠和经济运行方面发挥了重要作用。
【关键词】风机流量防喘振1 引言高炉鼓风机是钢铁企业保证高炉稳产、高产的核心设备。
鼓风机的控制系统如果出现异常,其后果将有可能造成高炉停产、风机毁坏等重大事故,严重时甚至造成高炉报废,给钢铁企业造成不可估量的损失。
因此高炉鼓风机送风量的大小,风压平稳与否,保护措施得当与否,直接表明控制系统质量的好坏。
采用轴流压缩机替代国内钢铁企业较多使用的离心压缩机,将极大地降低能耗,产生很大经济效益。
本文主要介绍采用瑞士苏尔寿A V系列风机的监控系统。
2 高炉风机2.1 风机系统构成及工艺本系统由一台盘车电机及相应的减速机构、主电机、增速箱、一台全静叶可调的轴流式风机、动力油站、润滑油站和各种辅助设备组成。
图1为轴流压缩机组的工艺流程。
可以看出,对于鼓风机系统,空气在经过滤风室之后进入鼓风机。
鼓风机对其做功后将其从排风管道排出。
排风管道分成3路分别通向主风门、防喘振阀和电动放风阀。
当机组处于正常的工况时,防喘振阀和电动放风阀都处于关闭状态,鼓风机排出的空气由主风门通向高炉。
如果风机工作点进入了防喘震控制,则控制系统将打开防喘振阀进行放风,从而降低风机的出口压力,使风机的工作点远离喘振边界。
防喘阀分为大阀和小阀,大、小防喘阀为分程控制方式,分程节点为小阀开度的60%。
小阀先开后关,大阀后开先关。
关阀时,大阀先关,小阀关至60%而后再全关。
当两个防喘振阀均出现故障,不能正常工作时,操作人员用手动控制电动放风阀完成放风操作。
2.2 高炉鼓风机控制要求高炉鼓风机的主要性能参数有送风量、排气(出口)压力、转速、静叶角度、效率等。
描绘这些参数之间关系的曲线称为特性曲线。
从喘振边界到阻塞线的范围称为稳定工况区,高炉鼓风机必须在稳定工况区内工作。
浅析炼铁高炉的自动控制系统
浅析炼铁高炉的自动控制系统随着科学技术的不断发展进步,人们对钢铁的产能与产品质量要求也一直在不停的提高,这加速了钢铁行业的快速发展。
文章主要是对高炉的电气自动化控制系统进行介绍,首先对高炉生产工艺进行了简介,其次对高炉自动化过程控制系统进行介绍,之后分别对高炉本体控制系统、高炉传动控制系统、热风炉控制系统、自动控制系统的监测与控制进行浅析介绍,最后结论是高炉炼铁采用电气自动控制系统增强了钢铁企业的竞争力,能够为社会和企业带来巨大的效益。
标签:炼铁;高炉;电气自动化控制1 概述随着科学技术的不断发展进步,人们对钢铁的产能与产品质量要求也一直在不停的提高。
众所周知,在钢铁生产过程中,炼铁是核心部分,高炉的出铁产能和铁水质量关系到下游成品钢材的产量和产品质量,因此高炉运行情况是钢铁生产中至关重要的环节。
在生产过程中,高炉炼铁不能出现停滞情况,需要一直连续作业,同时,高炉生产温度高、生产工艺复杂,需要配套的电气自动化系统对整个高炉生产进行操作控制。
高炉电气自动化控制是在无人直接参与的状态下,运行仪表检测和自动控制手段对一些机械设备进行工序过程控制。
目前,大型现代化高炉全部是使用仪表检测控制系统、电气自动化控制系统以及计算机监控管理的过程控制来完成高炉生产。
仪表检测控制系统和电气自动化控制系统通过DCS或PLC系统完成。
2 高炉工艺简介高炉可将铁矿石球团与焦炭混合,通过氧化还原反应生成生铁与其他产物。
高炉炼铁在炉料由上而下,煤气由下而上接触反应,是个连续的生产过程。
炉料从炉顶装进炉内,将从热风炉加热到1000°C以上的热风从进风口由鼓风机送入高炉内,炉料内的焦炭进行燃烧,生成高温的还原性气体,并加热缓慢下落的炉料,还原铁矿石球团,变为铁。
铁矿石上升到一定温度后,铁水熔化滴落,铁矿石中其他物质变为铁渣,实现渣铁分离。
上升的煤气流将热能传导至炉料,温度降低,形成高炉煤气。
3 高炉自动化过程控制系统高炉过程控制是根据仪表采集获得的检测数据,对高炉运行状态进行预判,从而实现对高炉的全程控制。
武钢八高炉热风炉自动控制系统简述

武钢高炉热风炉自动控制系统简述摘要武钢某高炉配置四座内燃式热风炉,采用多项先进工艺,能稳定提供1250℃热风温度,利于高炉强化冶炼、降焦节能。
热风炉自动控制系统的高效运行,满足高炉对高风温的需求,产生巨大的经济效益。
关键词热风炉自动控制经济效益1、引言武钢某高炉于2009年8月1日顺利投产,有效容积3800m³,配置四座内燃式热风炉,采用矩形陶瓷燃烧器、悬链线形全硅砖拱顶、转炉煤气富化高炉煤气燃烧、烟气余热回收装置等先进工艺。
助燃空气是由两台助燃风机(BAB1/BAB2)一备一用集中提供。
公共部分、液压站等分别为液压阀、电动阀和汽动阀控制。
设计风温1250℃,最高1320℃,控制系统采用法国施耐德自动公司可编程序控制(PPC)系统,控制方式分别为交错并联、单炉自动、半自动、集中手动机旁非联锁。
通过INTOUCH人机对话界面实现自动化。
子系统采用美国TPS集散控制系统,可控制各种调节阀。
热风炉设计控制参数见表1。
八高炉投产以来主要各项经济指标见表2。
表1.高炉热风炉设计主要控制参数2、控制方式描述基础自动化控制方式是指对热风炉系统中的设备进行的控制的方式。
如:助燃风机、各个切断阀、各个调节阀抢救无效控制方式。
以下对热风炉公共部分和单座热风炉分别进行叙述。
2.1热风炉公共部分机旁手动控制:在现场各阀门旁设机旁操作箱单独操作,工艺联锁关系解除。
集中手动控制:在主控室HMI上对热风炉各阀门进行遥控操作,保留工艺联锁关系。
2.2单炉部分单座热风炉的控制方有以下四种,可在主控室的HMI上对每一座热风炉的控制方式分别进行选择。
(1)机旁手动控制:此控制方式用于热风炉休风时,此时解除工艺联锁关系,所有阀门均由机旁控制箱操作。
(2)集中手动控制:在主控室HNI画面上对热风炉各阀门进行手动遥控操作,保留工艺联锁关系。
(3)半自动控制:此控制方式要求在热风炉系统状态转换时,必须在HNI键盘上按下单个热风炉的“送风”、“燃烧”和“闷炉”按键。
高炉鼓风机逆流保护自动控制系统的设计与应用
高炉鼓风机逆流保护自动控制系统的设计与应用本文阐述了高炉鼓风机逆流保护自动控制系统的设计与应用,并详细介绍了逆流的概念、逆流检测保护系统、风机安全运行。
为了提高高炉鼓风机运行稳定性,提出了一种逆流保护检测方法及逆流保护自动控制理念。
标签:高炉鼓风机;逆流;喘振;应用,前言高炉鼓风机作为向高炉供风的系统,其稳定运行对保证高炉乃至整个钢铁厂的生产正常有十分重要的意义。
为了有效检测逆流隐患,并提高逆流检测准确率,在发现逆流时采取有效措施避免人员或设备出现危险,经过研究开发出高炉鼓风机逆流保护自动控制系统。
1、逆流的概念逆流是轴流式压缩机最危险的工况,形成逆流的原因有两方面,一是喘振的进一步发展,喘振的本质是叶片凸侧的气流分离现象;整周叶片气流分离结果会造成压缩机的排气量和排气压力急剧下降,如果管网容量很大,管网压力不会随之下降,因而形成管网压力大于压缩机的排气压力,形成压缩机的排气量由正经零变负,即管网的气体向压缩机体内倒流,所以说逆流是喘振的进一步发展。
第二方面原因是工艺系统事故使外部管网内的压力骤然升高,形成气流向压缩机的倒流。
2、逆流保护检测方法逆流保护系统在风机上安装三个差压开关,检测测得是风机的喉部压差。
当流量正常时,接点是闭合的;当流量较小,喉部压差低于设定值时,接点断开,信号送入防逆流保护系统,启动防逆流保护系统工作。
喉部差压开关故障会导致风机逆流停机,从而影响向高炉送风,影响高炉生产;因此风机通过现场安装3块差压开关,程序中把3选2(只有两个或三个差压开关损坏,才逆流停机)输出结果作为命令执行条件,防止其中一块差压开关坏掉,而造成风机故障停机3、逆流检测保护系统为了加强防喘振保护,设置了防逆流保护系统作为防喘振系统的后备保护。
PDSLL100代表差压开关,测得是风机的喉部压差。
当流量正常时,接点是闭合的;当流量较小,喉部压差低于设定值时,接点断开,信号送入防逆流保护系统,启动防逆流保护系统工作。
高炉鼓风机控制系统的设计和应用

浙江大学硕士学位论文
第二章工艺流程及控制系统介绷
匿2.1高炉炼铁工艺流程
高炉炼铁的化学反应过程及公式如下,
C+02=C02 C+C02=2CO
(2.1)
G-2)
当CO气体与矿石相遇在高温下将产生还原作用, 再经加热在炉底形成铁水
靼炉渣【5】。
3Fe203+CO=2Fe304+C02 Fe304+CO=3Fe+C02
浙江大学硕士学位论文
第二章工艺流程殿控制系统介绍
高炉鼓风机的主要性能参数有风量、排风压力、转速、静时角度、效率等, 描绘这些参数之间关系的曲线称为特性曲线。在一定转速(或静叶角度)下,最小 的风量受喘振边界的限制,最大风量受鼓风机阻塞线的限制。从喘振边界到阻塞 线的范围称为稳定工况区,高炉鼓风机必须在稳定工况区内运行。 高炉鼓风机能否稳定的工作童接影响着高炉的芷常生产,如果高炉鼓风杌在 冶炼过程中突然由于故障而停车,将导致高炉中的铁水和矿料由于没有风压而下 落进丽凝结在炉内,这就是炼铁工艺中所说的高炉灌渣现象。高炉灌渣将会给企 业造成巨大损失并对高炉本身产生很大的损伤。
一关键词:鼓风机,喘振,解耦,通讯,PLC
llI
2.髓e des主萨of Con昀l嫩odel泌con觚l system
C0n胁ol system adopt
a
lot of adV锄ced con缸.0ltechnology搬d
conn舫l恻ng,
s诫ona黟blade
such越v翻匠拍le鲥n黼垃・su习弦删ustnl熊t,deco叩le con昀l
少。 (2)
离心式。离心风机是通过离心力的作用,通过叶轮叶片对空气做功,使 空气的箍力和动能得以升高,离心式鼓风机的工作效率较低,但是由予 其价格低及对空气过滤的要求不高,所以仍普遍采用。
高炉鼓风机控制系统的设计和应用探讨

高炉鼓风机控制系统的设计和应用探讨 Nhomakorabea刘 小 臣
( 广东省 阳春新钢铁有 限责任公 司设备 工程部 .广 东 阳春 5 2 9 6 0 0)
【 摘 要l 在 国内改革 开放 的带动下 ,国内钢铁行业开始 了快
转换,以满足多变的工况需求。 依据鼓风机结构组成 ,计算机控 制系统应 该由五路 模拟量控制 输出, 由调速系统控制鼓风机转速 、汽轮机气 门调速 ,协 同控 制转 速的 P I D控制器组成 闭环控 制回路 ,调速系统与 p I D转速控制器虽 分属两个独立的控制系统, 但在工作过程中组成串级控制逻辑结构 , 能够实现防干扰的作用,又因 P I D控制器操作方 式单一 ,因此工作 动态稳定,对机组的扰动性低 。在静叶角度与防 喘振控制输 出中, 应采用静叶角度控制器与 防喘阀手操器 ,在鼓风机组辅助 设备控制 中则采用驱动报警开关显示来实现开关启停的功能。 为满足计算机控制系统的要求 ,需要对计算机 D O S系统进 行结 构设计 ,以使其符合系统软硬件要求 、通讯系统要求 ,设定操作员 使用权限,并对报警系统 、通讯系 统进行控制器 的连接 ,能够 随时 监测接收 以及处理接 口信息 ,最终设计 出优化 的控制系统方案 ,满 足连续控制 、优化控制 、逻辑控制 以及顺序控制 的要求 。D O S 系统 结构主要集成控制系统中的通讯组件、过程控制器 以及 I / o卡件, 过程控制器与 I / O卡件通过冗余通信网络连接 ,不仅 能够完成数据 采集、滤波 、监测 、警报 以及控制输入输 出功能 ,还 能够实现 故障 的 自我诊断 ,对故障 区域进行隔离或者预警 ,使维修工作人员 能够 及时的处理故障,减少经济损失。 鼓风机控制系 统还包括供 电系统以及 地线 系统的设计,供电系 统是维持计算机控制系统正常工作 的重要保证 ,供 电不正 常如 电网 波动、对 电网的干扰等还会影 响到系 统的可靠性 以及稳定性, 因此 必须保证供 电系统 的稳定运行 ,防止 电网干扰 ,保证供 电系统 的连 续性、稳定性 。在进行计算机供 电系统设计时应该采用两路供 电线 路并行的思想,一路为 U P S 电源 ,另 一 路 为 交流 稳 压 电源 ,此 外 还 应 包 含 备 用 电源 以及 关 键 设 备 的备 用 蓄 电池 等 。地 线 系 统 的设 计 要 注意防干扰特性 ,在铺设过程 中注 意与动力 电缆等线路分开 ,采用 带有屏蔽功能 的电缆 ,以减少 电磁干扰 。正确 的地线设计应 当是 既
自动控制在高炉鼓风机防喘振系统中的应用

0 前 言
舞钢高炉 B P R T系统选用了瑞士苏尔寿公司
一
旦工况不稳定就会导致管网阻力增大, 流量减
小, 排气压 力随 之 上升 。管 网阻 力 与高 炉 工况 有 关, 很难 控制 , 只有从 流量 着手 , 即在 喘振 即将 发
Ab s t r a c t T h e p a p e r i n t r o d u c e s t h e p r o c e s s l f o w o f a i r b l o w e r ,t h e g e n e r a t i o n a n d h a r m o f t h e s u r g e,a nd t h e
高炉鼓风机担负着 向高炉供风的任务 , 其运
生强烈振动, 鼓风机机壳内温度急剧升高 , 大大降
・
4 6・
宽艨扳
第 l 9卷
低风机的使用寿命¨ 】 。
3 防喘 振原理
临界排气压力。喘振试验时, 鼓风机送风 阀门关 闭, 防喘振阀和放风阀全开。当静叶达到指定角 度时, 逐渐关小防喘振阀憋压, 测试鼓风机喘振点 临界送风压力。舞钢的鼓风机静 叶开度范 围为
( 舞 阳钢铁有 限责任公司) 摘 要 介绍 了高炉风机的工艺流程 、 喘振的形成及其危害和防喘振系统 的组成 , 对喘振线 、 防喘振线 、 防
风机 自动化控制 防喘振 P L C
喘振阀 自动调节线 的计算 和防喘振控制策略进行 了分析论述 , 以期提高设备 的使用寿命。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高炉鼓风机自动控制系统
[摘要]简要介绍了鼓风机自动控制的应用,经典控制方法与程序设计相结合,提高控制的可靠性。
[关键词]喘振自动控制调节
高炉鼓风机在炼铁生产中是一重要的子系统,该系统控制的好坏直接影响到送风的质量,从而关系到高炉生铁的产量和能耗。
一、系统介绍及主要设计参数
武钢7#高炉鼓风机设计使用的是MAN TURBO公司的A V90-15机组。
该机组由10KV ABB同步电机通过增速齿轮箱带动轴流鼓风机。
该机组还有如下的辅助系统:润滑油和控制油单元,动力油单元,顶轴单元,盘车单元,进气过滤器单元等。
主要设计参数如表1-1:
二、自动控制系统构成
TURBOLOG DSP BASIC/4为主控制器站,采集处理所有I/O信号。
TURBOLOG PROTECT中的COMPACT/M3为冗余喘振监测(逆流保护)系统,并带有VOTER CARD REL2002(紧急停机保护选择系统)和喘振计数器,使用TURWIN可进行编程和强制调试。
TURBOLOG DSP PROVISET为支持人机界面的计算机系统,提供实时监控、趋势记录、通讯功能。
风机监控系统使用BENTLY NEV ADA 3600 。
建有一个操作站和一个工程师站。
三、系统控制功能及原理
整个机组的控制系统有以下几大部分:连续控制、逻辑控制及操作监视管理等。
连续控制功能有送风流量/压力调节系统、风机防喘振调节系统。
逻辑控制系统有机组启动步骤联锁系统、逆流保护系统、重故障紧急停机联锁系统、供辅设施控制系统、送风与拨风控制系统等。
整个机组的起停运行使用的是顺控程序,程序方框图如图3-1:
(一)重故障紧急停机联锁控制
为保障机组的安全运行,设有相应的停机联锁保护,如果满足其中一个条件,就要进行联锁保护停机。
这些条件为:(1)按下急停按钮,(2)风机轴位移过大(+/-0.6MM),(3)持续逆流,(4)润滑油压力过低(低于0.8bar),(5)主电机
跳闸。
(二)防喘振控制
1.控制原理
轴流风机运行在不同的风压时,都有严格的吸入风量限制范围,低于该限则发生喘振。
喘振时出风压力和流量急速地升降,会听到喘气般的声音,风机的空气温度会急速上升,所以应绝对避免风机在喘振区工作。
通过控制防喘阀,防喘振控制系统使风机的操作点始终保持在稳定范围内,不受过程流量和压力的约束。
防喘控制是独立的,但它的功能在某些过程会受到限制。
如在机组启动和停止时防喘阀是处在故障安全位全开位的。
如图3-2所示,是风机的特性曲线,即风机进风压力与排风压力比POUT/PIN 与进风体积流量QIN的关系曲线。
1-6号曲线对应与不同的静叶角度,每条曲线都有一个最高点,而连接最高点的虚线即是风机的喘振线。
喘振线的是通过对风机做喘振试验,实测出风机4种进入喘振状态下的进风压力PIN、排风压力POUT、进风温度TIN、喉部压差△PIN等参数,根据它们的函数关系得到的。
为防止风机进入喘振工况区,确保风机安全运行,将防喘线平行下移3%、6.4%、9.72%得到三条同样形状的曲线作为防喘振调节系统的安全运行线、喘振预报线、防喘线。
其安全运行线的方程近似为:
POUT/PIN=a+bQ2IN/TIN
QIN进风流量,a b风机系数
QIN2=K2△PIN/? ?PINM/zRTIN
K比例系数,M气体分子量,z气体压缩因子,R气体常数
△PIN=r(POUT-aPIN)/bK2,r=M/zR为常数
只有当△PIN=r(POUT-aPIN)/bK2时,风机才不会喘振。
2.控制方法
系统的工作原理是:风机喉部压差△PIN、进风压力PIN、排风压力POUT、进风温度TIN的PV值,经测量变送后送入折线函数单元FX,作为防喘调节系统的输入,系统按防喘线的函数关系计算后得出给定值SP,与排气压力POUT 的PV值比较,当PV值达到报警值时,系统发出报警信号;当PV值达到或超过放空值时,防喘振调节系统起调节作用,经PID计算后得到相应的值,控制放风阀的开度,使放风阀打开,工况点重新回到放空线以下运行;若放空
阀开启仍不能使工况点回到放空线以下,工况继续恶化,当PV值达到紧急放风值时,计算机输出信号使电动放风阀快速开启,实行紧急放风.系统流程如图3-3。
由于放风量变化范围大,而且要求动作快,设置了主、副放风阀。
副放风阀采用快速反应的小型阀,以求防风的平稳,只有在紧急状态时才启动主放风阀。
这应实行分程控制,分程的取值范围,视工艺要求而定。
3.逆流保护
逆流是风机喘振的前兆,逆流保护可作为防喘控制的一项附属保护措施。
当喘振发生且超过了防喘调节器的范围,逆流保护控制逻辑将调节风机防止喘振状态的进一步升级。
在机组启动完毕,并且静叶已经打开到一定角度,机组已处于正常工作状态时,风机喉部压差如果小于1.5kPa,逻辑系统立即产生喘振报警,若再持续3s时间后信号仍未消失,系统在逆流报警的同时,进行逆流保护,机组自动进入安全运行状态,安全运行结果是:(1)放风阀快速全开,(2)静叶退回最小角,使风量减少,风压降低,(3)逆止阀强行关闭.若再持续6s时间内逆
流信号仍未消失,则逻辑系统在摮中媪鲾紧急报警的同时,联锁紧急停机。
(三)送风流量/压力控制
风机的送风流量和压力由过程负荷决定。
正常情况下,过程量的大小是通过改变由伺服阀控制的静叶角度来调节的。
通过选择目标风量,系统可不依据过程负荷自动调节静叶角度,以达到目标风量。
正常生产时,高炉要求定风量控制,以保证炉内平衡。
当热风炉换炉或高炉人工坐料时,需要比平时更多的风量。
为了补偿增加的流量(由于管路负荷的下降),流量控制自动切换到定风压控制,系统增加静叶角度来补偿压力损失。
过程完毕,系统自动返回到流量控制,静叶角度也降低到先前的初始流量设定点。
风量调节的工作原理是:进风管温度、压力和进风压差经补正计算后得出实际风量值PV与目标风量值SP进行比较,经PID计算后得到相应的值,输出给伺服阀,控制静叶角度的改变。
风压调节与流量调节的工作原理相同,直接采集风压值PV与目标风压值SP进行偏差计算,经PID运算进行调节。
为了保证两控制方式之间的无扰动切换,在系统中设置输出跟踪功能,使处于非工作状态的控制器输出跟踪工作状态的输出,即在进行风量控制时,风压的输出值跟踪定风量的值,反之亦然。
该计算机控制系统保证了机组的稳定高效运转,同时保证了紧急情况下高炉的生产。
参考文献:
[1]厉玉鸣等,化工仪表及自动化.第1版.北京:化学工业出版社.1999.4:295-298
[2]李子木等,本钢生产工艺知识.第1版.北京:冶金出版社.2001.5
[3]马竹梧等,炼铁生产自动化技术.第1版.北京:冶金工业出版社.2005.8:92-98
注:本文中所涉及到的图表、注解、公式等内容请以PDF格式阅读原文。