Trimble TX8扫描仪介绍
Trimble Scene三维激光扫描仪操作流程
目录1 概述 (2)2 外业数据采集 (2)2.1 外业踏勘 (2)2.2 控制点数据 (2)2.3 点云数据 (10)3 内业软件简介 (10)3.1 TRIMBLE Scene的组成 (11)3.2 快速视图 (12)3.3 平面视图 (13)3.4 3D立体显示 (14)3.5 快捷图标说明 (14)3.6 点云数据导出 (16)3.7 测量距离 (17)4 内业数据处理流程 (17)4.1 数据整理 (17)4.2 加载数据 (18)4.3 选择参考点、面 (18)4.4 靶球、面配对拼接 (19)4.5 应用彩色点云 (21)4.6 导出点云建立模型 (21)1 概述随着测绘技术的日益发展,高效,简便的各项技术相继问世。
TRIMBLE三维激光扫描仪为当前世界最小、最轻的激光扫描仪。
与传统的二维平面图相比,任何人都会发现三维图像的优点。
因为激光扫描仪可以在每秒得到约百万测量点,并产生其周围环境的精确三维图像。
TRIMBLE三维扫描仪尺寸为24x20x10 C㎡重量:5kg采用集成彩色相机,7000w像素的无视差彩色相机高性能电池可持续工作5小时数据管理采用便携带的SD卡测量速度为976000点/秒误差±2mm视野305°(垂直)x 360°(水平)数据处理流程分为:外业激光数据采集、内业激光数据拼接、后期三维建模、数据集成系统。
2 外业数据采集2.1 外业踏勘每个项目开始之前,必须对需要采集数据的地点进行踏勘,对其周围的地理环境、天气因素、人为影响作一个系统的了解,做好计划,并防止采集数据发生的意外。
2.2 控制点数据为了对扫描图像进行绝对定向,需在整个房屋附近设置多个靶球或靶点,并利用仪器,测量出每一个点的位置。
靶球放置必须保证前后站都能看到。
放置好靶球后,架起仪器开机。
开机后界面如下:仪器为触摸屏操作,点击管理选项,进入管理对话框,在项目里建好此次扫描的项目文件,并命名。
车载激光扫描仪完成京津塘路面测量任务

车载激光扫描仪完成京津塘路面测量任务
8月18日,测绘分院首次利用美国Trimble公司的MX8 车载移动激光扫描测量系统完成了京津塘高速项目23公里5m间距的精细化路面测量。
图1.Trimble MX8车载激光扫描扫描测量系统
图2.Trimble MX8车载激光扫描扫描测量系统
由于是现有道路改建项目,进行常规的测量作业要上高速公路,一是需向公
路路政高速处和高速交警大队分别申请上路作业许可,二是京津塘高速车流量大,人工测量安全风险突出。
而车载移动激光扫描技术集成了高精度的激光扫描仪(Riegl)、全球定位系统(GPS)、惯性测量系统(IMU)及车轮编码系统(DMI),仅用两天时间就完成了全部外业数据的自动化采集工作(传统测量模式至少需半个月)。
相关成果如下:
图3.激光点云数据
图4. 激光点云数据
图5. 激光点云数据
图6. 实时获取与点云数据匹配的影像
三维激光扫描技术是继GPS之后,测绘行业在技术上的又一次飞跃。
历经十几年的发展,三维激光扫描技术无论是在硬件设施上,还是在应用领域上,都在快速不断的向前发展。
如今,三维激光扫描技术已经成为空间数据获取的重要技术手段,使我们从传统的人工单点数据获取变为连续自动数据获取,不仅提高了观测的精度和速度,而且使数据的获取和处理朝智能化和自动化方向发展。
由于测量任务内容和经费限制,我们仅利用以上数据生成了设计所需的23
公里5m间距的断面数据,如下图:
图7. 激光点云数据生成的5m间距断面数据
经检核确认,此次利用激光扫描技术生成的断面成果很好地满足了项目需求。
测绘分院
2013年8月23日。
美国天宝三维激光扫描仪简介-Trimble CX_DS_CN

2M3(扫描仪在仪器箱内) 湿度 : 20% ~ 85%, 非冷凝大气 标准配件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 滚动仪器箱;
集成供电单元 ; Trimble基座 ; 50贴片 ; USB闪存;
修; • 通过填写表格和容积测量来校准储油罐体积。
全面解决方案 Trimble CX 数据可单独使用,也可与Trimble 其他测量数据联合使用,例如 Trimble FX™ 、 GX™ 3D扫描仪和 Trimble VX™ 空间测站仪。
Trimble Cx 扫描仪
性能指标
脉冲波 ™ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 脉冲与相位相结合 测程(标准条件下)1,2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80m(90%反射表面)3
数据传输线 , WLAN天线 可选配件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Trimble Tablet
Trimble MMS车载扫描系统介绍

Trimble车载移动测绘系统是一套先进的高精度车载三维激光雷达相机系统,该系统采用当今最前沿的测绘技术,集成了全球导航卫星系统、惯性导航系统、激光雷达扫描仪、高分辨率数码相机与距离量测装置等多种传感器,可实现快速全面的空间地理信息数据采集。
基于直接惯导辅助定位功能,能克服全球导航卫星系统信号失锁问题。
车载移动测绘系统组件采用模块化设计,具有良好的灵活性、扩充性与兼容性,可依据数据采集精度要求或项目需求,配置不同型号的定位定姿系统、激光扫描仪与数字相机,能为智能交通、公路与铁路资产清查、城市管理、电子地图、数字城市等国家基础数据建设提供快速精确的空间地理数据采集与完整的应用解决方案。
Trimble MX1—移动影像日志系统Trimble MX1移动测绘系统广泛应用于地面摄影测量,为传统的基础设施特征地理要素采集提供强有力的补充。
●为走廊带特征地物提取提供高分辨率数字影像●为测绘和GIS应用提供全面的空间地理信息●专业的相机镜头校准,消除镜头畸变误差●用户自定义时间或距离间隔进行数字影像采集●良好的系统扩展性、兼容性与可升级性●功能完备的基于图像与点云数据的量测和三维空间信息提取的后处理软件——Trident ImagingHub●Trimble MX2—水陆两用三维激光移动测量系统Trimble MX2移动测绘系统集成了中测程激光扫描仪,高精度定位定姿系统,用于获取具有地理参考信息的高精度三维点云数据。
MX2系统既可以与360度全景数字成像系统集成,也可以与用于水下地形测量的多波束测深系统集成,适用于在各种类型的陆上或水上交通工具上快速安装与拆卸、是一套集成度高、一机多能的移动测绘系统。
●多功能应用系统,可采用各种陆地或水上交通工具作为搭载平台●便携,安装拆卸方便,易操作,专业技术要求低●高性能激光扫描仪采集完整的同步点云数据●高分辨率全景数字影像与地表影像,易于空间地理信息提取●功能完备的基于图像与点云数据的量测和三维空间信息提取的后处理软件——Trident Imaging HubTrimble MX8—业界最高精度三维激光&影像移动测量系统Trimble MX8移动测绘系统集成了高精度激光雷达扫描与可定制化的数字成像系统,能够快速高效低采集高精度、高质量、完整的三维空间数据。
Trimble 中文简易使用手册版本

3.完成设置:相关参数设置好后,点确定。后将弹出对话框。说明已设置成功。然后退出GPS Controller。就可以使用第三方支持NMEA协议的软件了。
?现在记录:点击创建之后立即开始记录数据(用户必须到达准确地点)
?以后记录:点击创建之后,GPS并不记录数据需要,自行点击记录,才会开始记录数据(以下为以后记录的数据采集方法)
输入注释,点击记录 在记录20-30秒左右后点击确定即可创建此点要素,如此进入下一个位置的数据采集
第三章:后处理软件-Pathfinder office
第四章:附录
4.1 如何将成果导出Excel表格
1.打开外业采集的下载后文件
2.在“功能”中选择导出
3.选择输出的路径后,点击“属性”
选择“结构ASCII”,然后点击修改
4.按以下设置即可
4.2NMEA输出的设置
如需要使用第三方软件,需要使用Trimble GPS Controller software,version 2.21 或是以后版本设置输出。
如果从GPS设备下载数据到计算机,选择【接收】,如果把计算机文件上传到GPS设备,选择【发送】。
3.5 成果输出
数据差分完成后,我们最终的目的是将这些改正后的数据导入到GIS数据库中,以完成数据库的建立或更新。Pathfinder Office软件可导出多种GIS数据库格式,另外用户也可自定义输出数据库格式。
Trimble R8 GPS性能简介

Trimble R8 GPS性能简介
Trimble R8 GPS系统结合了最新的GPS接收机的领先技以及多项创新,大大地改善了作业性能和效益。
Trimble R8是一款24通道,双频GPS接收机,GPS天线和数据电台与接收机整合为一体,仅重1.3公斤,质量轻便,有利于野外作业;
Trimble R8的设计保证提供高质量的跟踪性能。
其使用功率小于2.5瓦,先进的TrimbleR-跟踪技术确保即使在GPS恶劣的环境下,仍有最佳的跟踪表现;借助于新的L2C信号的引入,Trimble R8将提供更可靠的跟踪;专利保护的四点式天线为系统内置的双频接收机提供相位中心的最大精度可达亚毫米级的稳定性。
系统包含有内置的WAAS和EGNOS功能,可以在无基准站的情形下提供实时差分定位。
作为无线的基准站,操作简单,设置方便Trimble R8具备升级选项,可升级到带有450 MHz并具有发送功能的内置无线电台的配置,使其成为100%不受线缆限制的基准站。
无需外部无线电台、线缆、三角架,架设和操作简单,省时高效。
带有内置无线电台的Trimble R8 GPS系统现在完全可以在基准站和流动站之间互换,Trimble R8 已经标准化,在不同的测量要求下,其既可作为基准站,也可以作为流动站使用,Trimble R8大大提高了工作的灵活性。
内置无线电发射范围3—5公里。
Trimble为GPS现代化开发的R-跟踪技术;适合各种应用的基准站和流动站通讯选择
特别轻便,经久耐用。
Trimble_FX_扫描仪介绍

TRIMBLE FX
PPP 流程工业设计, 专为公式设施管理、历史文物、 司法等其它场合设计 360° x 270° 全视野 扫描速度 1,200,000pts/s 清晰低噪点数据 小巧轻便的设计
Trimble RealWorks软件中的FX扫描数据
®
FX扫描仪是先进的3D激光扫描系统,能让用户随时随地快速获取高清 晰高精度的数据。360°X 270°全视野,获取速率 1,200,000 点的每秒。集 成设计、小巧轻便能提高工作效率加快项目进度。
. .
. .
. .
. .
. .
. .
. .
15mW . . . 3R
. . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360° x 270°
. . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 仪器状态
(90%反射率). . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4 mm @ 50 m; 1-pass HQ: 0.6 mm @11 m; 2-pass: 0.45 mm @ 11 m;
新一代三维激光扫描技术,

易用
简洁的操作界面、清晰的触摸屏
直观易学 快速启动 一键扫描,一键设置
易用 - 便利的界面设计
• 高度直观的操作界面 • 一键设置、一键扫描
V.S
TX8 徕卡P20
易用 – 现场数据质检
• 显示真实采集到的点云,精细到每一个点 • 1比1 实时缩放以检查每个细节
全新的方法 – 无目标靶配准
‣ 14个扫描站点 ‣ 自动配准时间: 14 分钟
全新的方法 – 无目标靶配准
使用同一台电脑测试
法如Scene
项目 Vegas剧院
Avago Main Avago Mez
天宝RealWorks
结果
1组 1组 全部成功 1组 全部成功
测站数
5 12 53
结果
1组 1 组: 3 个站 配准错误 未获得结果
用时
60 分钟 150 分钟 N/A
用时
3 分钟 5 分钟 4 小时
Avago Bsmt
Evian Church
60
75 18
未获得结果
未获得结果 仅有3个测站 成功配准
N/A
N/A N/A
1组 全部成功
3组 全部成功 4组 全部成功
8 小时
5 小时 35 分钟
无目标配准技术 – 对用户的好处
• 外业不再需要使用目标靶
恒定精度
在户外的18% ~90%反射率条件下,TX8与FX相位扫描仪 测距标准差比测结果
14 12 10
Std dev (mm)
18% 50% 80% 90%
标准差 8 (毫米) 6
4 2 0 0 10
TX8
Trimble_3D激光扫描_解决方案

谢 谢!
Trimble GX 主要特征
• 实时双轴补偿器 • AutoFocus自动聚焦技术 • 业界最高的分辨率
– 3mm@100m
• OverScan™ 增程技术 • Real Time Coloring实时 彩色获取 • 集成实时视频技术
GX 的强大功能
• 内置高清Video摄像头 捕获数码相片和纹理数据 DVD分辨率 直接在视频上观察、选取 扫描区域
一、Trimble GX 三维激光扫描仪
像全站仪一样好用的扫描仪 全自动 360°水平视野
功能突出,性能领先
Trimble目前最先进的扫 描仪 产品!
Trimble GX 关键信息
1. 测量工作流程 2. 超强多功能 3. 工地联合测量的关键部分
Trimble GX 主要特征
• 测量工作流程 (带 DR 直接反射技术) • 专为野外设计 • 便携式 • 可架设在已知点上 • 快速目标获取 • 精密长距离激光测量
与全站仪、GPS联合测量
功能多样, 性能优异
• 高空间分辨率 – 3毫米 @ 100 米 • 高精度 – 2.5毫米 @ 100 米 • 高测程 – 200米(最优化效果)
具备OverScanTM 技术 – 可达 350 米
• 顶部适配器:接驳GPS天线、棱镜或专业数码相机
二、Trimble 完整的三维软件系列
1. 数据采集软件
PointScape / PocketScape
PointScape
2. 数据编辑后处理软件
RealWorks Survey
PocketScape
3. 智能三维建模软件
3Dipsos
RealWorks Survey
3Dipsos
天宝 TX8绘制地形图流程(武汉海德斯路编制)
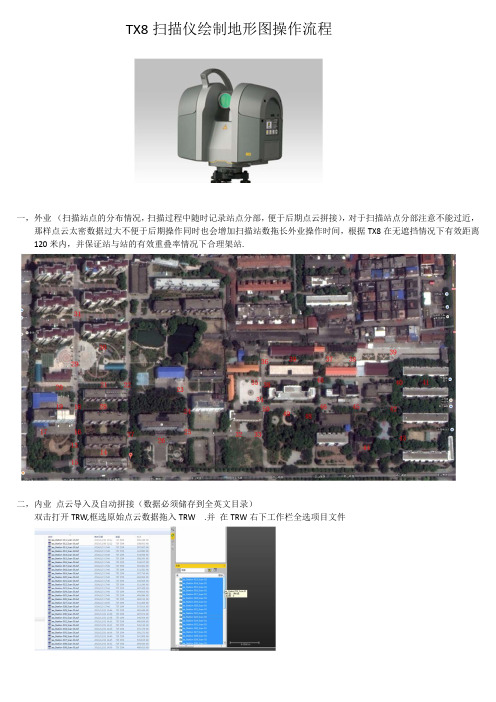
TX8扫描仪绘制地形图操作流程一,外业 (扫描站点的分布情况,扫描过程中随时记录站点分部,便于后期点云拼接),对于扫描站点分部注意不能过近,那样点云太密数据过大不便于后期操作同时也会增加扫描站数拖长外业操作时间,根据TX8在无遮挡情况下有效距离120米内,并保证站与站的有效重叠率情况下合理架站.二,内业 点云导入及自动拼接(数据必须储存到全英文目录)双击打开TRW,框选原始点云数据拖入TRW .并 在TRW右下工作栏全选项目文件在上方菜单栏 选择配准——选择第2项(无目标配准)对点云进行自动拼接这个是选择以那站的数据为基准站(其他站的仪器坐标都归到你选择的哪站,实际工作中我们选择地势较为平整的哪站数据,点开始就可以自动拼接了.拼接完后会出现拼接报告,可以对数据进行检查)根据实际站数和电脑配置情况 配准时间不同,配准完毕后在文件菜单—TZF扫描—建立采样扫描站步长像素数 选择1 表示全部加载点云 数字越高 表示对点云抽吸越多 下面估计的点数也相应减少,同时处理时间也相应减少,但会有抽吸到特征点的危险,可能不利于后期制作成果,所以除非数据太大电脑带不动一般都选择默认1,全部加载点云数据这个时候还看不到点云的,把下图1里改成办公室测量,点下2位置的灯泡图标 显示当前点云 在点3位置的房子图标居中点云 就可以看到了转大地坐标和绘制地形图在实际测量的时候 会在整个绘制区域分布 已知点 在外业扫描的时候要在点上面做记号 用扫描仪扫进去,这里我们用的是黑白靶纸 现在我要在点云上找到那些点回到配准模块下 在配准菜单下选择大地基准工具点界面上的 通过选取 就可以点选靶纸中心已知点的位置 并把对应点的X Y Z坐标输入进去 同样的方法把其他点的坐标输入进去 ,点应用后大地坐标就转换完成绘制地形图绘制房子在办公测量下 按照下图选择特征点工具按照下图 将前缀名字改成fangzi 索引为1 设置显示模式为只要点点选房子四个角 作为特征点 后期在CASS 连接起来人行横道边缘特征也是一样,把前缀的名字改为自己认识的 ,索引改为1 就可以在点云上 点选出道路的范围树木提取也是一样 在前缀里输入shu 索引1 就可以在树根部 点选树的位置了(其他的物体也是一样的 改好名字和起始数 就可以在 点云上选取 以标出物体的实际位置和范围 这里不在一个个的导出点集 并导入CASS点选列表创建的点集 文件—高级输出—输出特征点集 并保存asc文件名称为x y z特征码后 点输出就可以了双击打开刚才输出的文件将asc输出的点集 改为cass识别的格式(把刚才起的名字后的 ,改为 ,,) (尾部 ,PC 去掉)并保存 把txt 后缀改为dat打开CASS 导入野外点号 就完成点的导入,就可以在CASS里加图例。
TRIMBLE R8使用说明
一、蓝牙连接设置(基准站)二、基准站配置三、任务与投影参数设置四、启动基准站五、蓝牙连接设置(流动站)六、流动站配置七、启动流动站八、工地校正九、测量点十、放样十一、数据传输十二、接收机说明十三、电台说明十四、常见问题一蓝牙连接设置(基准站)启动Trimble Survey Controller测量软件1、配置----控制器----蓝牙连接到GPS接收机:如果我们已经连过该接收机,就在连接到GPS接收机的下拉列表里选择。
如果下拉列表中没有该接收机的SN,那么我们点击配置,进行下一步的配置。
2配置----正在等待蓝牙配置----蓝牙配置窗口界面中:Turn on BlueTooth是打开蓝牙,必须选中此项。
Make this device discover to other devices使别的蓝牙设备能够发现本手簿,可选项。
注:接收机的SN可以在接收机的机身上查看。
3点击下面的Device(设备)选项点击New Partnership…开始搜索新设备如果有Trimble的GPS接收机已经开机的情况下,我们的手簿能搜索到该设备。
选中该设备(框中),点击Next----会弹出Enter Passkey(输入密码)对话框,直接点击Next(下一步),点击Finish。
蓝牙设备成功添加后就会在New Partnership…下面列出,点击OK(右上角)。
4、在 (连接到GPS接收机) 的列表中,选择您的接收机型号稍等片刻,就能看到手簿和接收机连通,在右侧的面板上显示接收机的当前信息,此时可以正常继续下一步工作。
BYUGBGHHUHNUIHNUHUHIUH二基准站配置我们只需要第一次使用该手簿的时候进行该项配置,通常在正常作业过程中不需要再进行设置。
Trimble Survey Controller测量软件1、配置----测量形式----RTK----基准站选项测量类型:RTK,播发格式:CMR+输出附加代码RTCM(不勾),测站索引默认29,截止高度角默认10度。
天宝全站仪完备的工程应用系统机详细性能说明
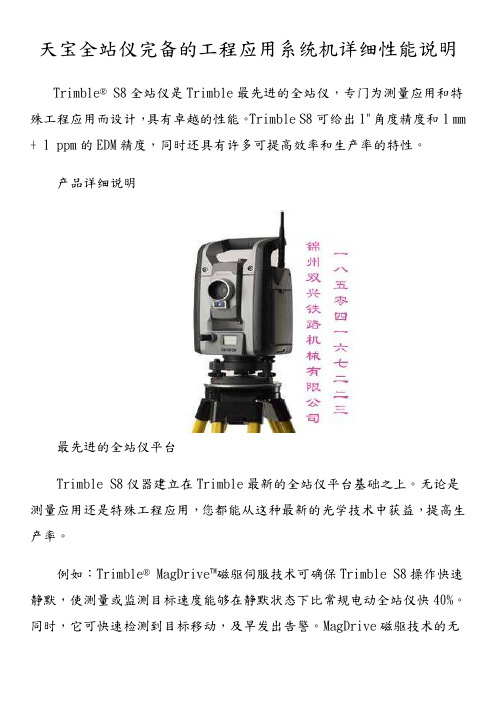
天宝全站仪完备的工程应用系统机详细性能说明Trimble® S8全站仪是Trimble最先进的全站仪,专门为测量应用和特殊工程应用而设计,具有卓越的性能。
Trimble S8可给出1"角度精度和1 mm + 1 ppm的EDM精度,同时还具有许多可提高效率和生产率的特性。
产品详细说明最先进的全站仪平台Trimble S8仪器建立在Trimble最新的全站仪平台基础之上。
无论是测量应用还是特殊工程应用,您都能从这种最新的光学技术中获益,提高生产率。
例如:Trimble® MagDrive™磁驱伺服技术可确保Trimble S8操作快速静默,使测量或监测目标速度能够在静默状态下比常规电动全站仪快40%。
同时,它可快速检测到目标移动,及早发出告警。
MagDrive磁驱技术的无摩擦运动特点,极大降低了仪器磨损,您可以尽情无忧地一周二十四小时连续使用仪器。
完备的工程应用系统Trimble S8全站仪与Trimble SurveyController™外业软件和新近推出的Trimble®4D Control™软件和谐配合,无缝连接,是特殊应用的完备解决方案。
Trimble S8 全站仪Trimble S8具有以下独特性能:•Trimble® FineLock™技术是智能化跟踪传感器,其窄视域可使Trimble S8不受周围棱镜干扰而检测到目标。
这一特性可使您更加灵活地安置棱镜,提供了卓越可靠的精度。
• 10 Hz高速同步数据输出使数据采集在动态应用中更加快速、更加准确。
例如:在铁路监测中,运送车或ATV可以快速移动,而精度不受影响。
TriMBlE SUrVEY coNTrollEr 外业软件–工程模块现在,Trimble Survey Controller软件提供单独的工程模块。
因为Trimble的这个工程解决方案采用Trimble Survey Controller界面,它可使测量业务向工程应用的拓展变得非常容易 - 测量人员不需要学习新的软件。
三维扫描仪型号分类

三维扫描仪通过扫描收集到的这些三维数据具有相当广泛的用途,工业设计、瑕疵检测、逆向工程、机器人导引、地貌测量、医学信息、生物信息、刑事鉴定、数字文物典藏、电影制片、游戏创作素材等等都可见其应用。
不同使用场景的三维扫描设备,差异是很大的。
下面给大家介绍一下三维扫描仪的分类和一些常见的型号。
以下是一些常见型号的三维扫描仪产品。
一、地面三维激光扫描仪地面三维扫描仪适用于几米到几百上千米的空间范围,精度一般是毫米级,在建筑、数字化工厂、公共安全等行业较为适用。
目前比较有名的地面三维扫描设备有Faro 法如,Trimble天宝,徕卡等,不同品牌各有千秋,我这边大致阐述一下。
法如FARO 手持三维扫描仪,是美国Faro公司的产品,品牌知名度高,产品优点在于设备很小很轻,大小仅有24厘米x 20厘米x 10厘米,重量仅有4.2公斤。
非常便于在复杂的环境下移动和安置。
而且其内置彩色相机可提供高达1亿6千5百万像素的无视差彩色叠加。
最终结果可得到精细照片级三维彩色影像。
还有一个优点是在阳光直射下,可高速远距离扫秒,例如Faro Focus S350,扫描距离一站可以达到350米,而且利用其所集成的GPS接收器,能够使每一次扫描与后处理相关联。
Faro这系列地面三维激光扫描仪降低了外业工作的强度,同时该设备的价格较有竞争力。
美国天宝Trimble地面三维扫描仪,较之于Faro来说略大,也是厘米级的精度,主机尺寸为335 mm宽x 386 mm 高x 242 mm 深,重量为10.7公斤(含三角基座不含电池)。
凭借天宝专利的Lightning闪电技术,在其整个测程范围内,TX8都可以每秒1百万个精确激光点的速度获取数据。
天宝的Lightning技术很少受到表面类型和大气条件变化的影响,所以可从每个测站中获得完整性的数据集。
二、低精度手持三维扫描仪这种三维扫描仪比较新兴,市场上同类型的产品很少。
比较出名的是MV F6手持式3D扫描仪,这款扫描仪使用红外光,专门用于扫描几十厘米到几米的大型物体和大面积空间,能迅速扫描复杂场景。
天宝TX8三维激光扫描仪在地形图测量中的应用
天宝TX8三维激光扫描仪在地形图测量中的应用
万雪华;王继卫;王锐
【期刊名称】《地矿测绘》
【年(卷),期】2016(032)003
【摘要】文章首先介绍了三维激光扫描仪的基本原理,接着阐述了其与GNSS RTK 和全站仪相比所具有的优势及在地形图测绘中的作业流程,最后结合一个实例简述了三维激光扫描仪在地形测图中的作业过程,并对地形图的精度进行了检测与分析,验证了三维激光扫描技术可应用在地形测图中且具有一定的优势.
【总页数】5页(P10-14)
【作者】万雪华;王继卫;王锐
【作者单位】江西省地矿局物化探大队,江西南昌330002;江西省地矿测绘院,江西南昌330030;江西省地矿测绘院,江西南昌330030
【正文语种】中文
【中图分类】P225.2;P217
【相关文献】
1.三维激光扫描仪在地形图测量中的应用 [J], 王世平
2.无人机测绘技术在区域地质地形图测量中的应用 [J], 刘振伟;黄瑛;谢丹;路佳
3.机载LiDAR和摄影测量技术在山地地区地形图测量中的应用 [J], 郑晶;温玉维;李小雁;卢召艳
4.无人机倾斜摄影测量技术在矿山大比例尺地形图测量中的应用 [J], 刘江
5.航空摄影测量技术在山西平朔煤矿区大比例尺地形图测量中的应用 [J], 李忠军
因版权原因,仅展示原文概要,查看原文内容请购买。
天宝TX8三维激光扫描仪在小区三维扫描测绘项目中应用
小区三维扫描测绘项目----武汉海德斯路编制基于三维激光扫描的地形测绘成图技术的应用,改变了传统测绘的作业流程,使相关外业测绘流程大大简化,工作时间大大缩短,外业人员的劳动强度大大降低,内业处理出错性显著减少,总体效率大大提高。
同时,利用扫描点云还可以生成点云浏览视频、三维场景浏览、互动等多种成果。
关键词:三维场景浏览、三维激光扫描、点云数据、数字小区、武汉海德斯路、Trimble TX8武汉海德斯路科技有限公司与江西某单位合作利用天宝最新三维激光扫仪Trimble TX8对某小区进行扫描,内业通过realworks软件进行点云导入、全自动配准、坐标系统转换、特征点(线)编码提取,进入第三方软件编码自动成图。
海德斯路以“激光应用解决方案领导者”为使命,推进三维扫描技术在电力行业的逐步深入应用,从而提供实用、科学的解决方案。
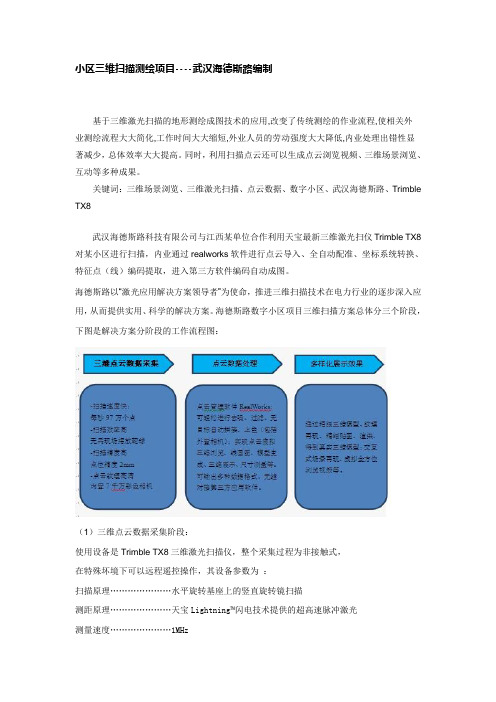
海德斯路数字小区项目三维扫描方案总体分三个阶段,下图是解决方案分阶段的工作流程图:(1)三维点云数据采集阶段:使用设备是Trimble TX8三维激光扫描仪,整个采集过程为非接触式,在特殊坏境下可以远程遥控操作,其设备参数为:扫描原理…………………水平旋转基座上的竖直旋转镜扫描测距原理…………………天宝Lightning™闪电技术提供的超高速脉冲激光测量速度…………………1MHz最大测程…………………120 m; 升级选项:340 m测距噪声…………………2 mm距离测量激光等级………………1类,对人眼安全,依据国际电工委员会激光等级测试标准EN60825-1 激光波长………………1.5μm,不可见最小测程………………0.6 m最大标准测程…………120 m ,对于反射率在18–90%之间的物体扩展测程………………340 m测距噪声………………<2 mm,2m – 100 m范围内反射率18–90%的物体测距系统误差…………<2 mm扫描视场角…………………360°× 317°测角精度 (8)(2)点云数据处理阶段采集后的点云数据通过Trimble RealWorks可实现点云过滤、匹配颜色、多站自动拼接、项目管理、测距、三维点云展示、三维空间分析、竣工数据与设计对比、三维建模、高清数码影像、项目飞行浏览、录像等应用,支持海量点云,速度快,可以满足高端客户对高质量三维效果演示的需求。
天宝全站仪监测解决方案

Trimble S8+4D Control 监测网络结构示意图
Trimble S8+4D Control 实时监测 —无线传输
S8全站仪
S8全站仪 数字温度计
电台
4D Control Advance
Internet
远程登录
Trimble S8+4D Control 实时监测 —有线传输
S8全站仪
Trimble S8
?Trimble S8 1“ DR HP,远距离精准锁定,应用于形变监测:
1“全站仪,免棱镜测量、高精度电子测距、远距离精准锁定功能。 远距离精准锁定目标距离可达 2500 米。 用于形变监测,如露天矿监测。包含 Trimble S8 标准版的所有功能(除了 TrackLight 功能)。
Hello, TS Monitor World!
Trimble S8+4D Control 监测优势
– 全自动化、高精度、无噪音 – 测量结果直观、实时、观测频度高 – 监测点的成本低廉、可以大量布设 – 只要能够控制住测站到监测点的距离,精度可以达到亚毫米 – 监测方式、通讯方式灵活 – 适合应用: 监测自动化和实时性要求高,但全天侯要求并不高 有可通视基准点,没(少)有通视干扰的监测环境
激光指示器 DR300+ 测距系统
完全同轴的光学系统
其它技术--自动锁定技术
Autolock Transmitter
Eyepie ce
Lens Autolock Detector
跟踪光
? Tracklight 是可见的导引光, 它可导引持杆员站在正确 的方向。
? 跟踪光由两种颜色的闪烁 光构成,每种颜色位于它 自己的发光侧。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
trimble tx8 Laser scanner
Key Features
Increase field productivity with less scans and number of stations
The Trimble® TX8 laser scanner sets new standards for performance and ease of use in high-speed collection of 3D data. Using a state-of-the-art blend of speed, long range and precision, the Trimble TX8 delivers high quality results in industrial measurement, engineering, construction, forensics and other applications that require high levels of accuracy and flexibility.
DATASHEET
trimble tx8 laser scanner
Performance
Overview
physical
Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . 335 mm W x 386 mm H x 242 mm D (13.2 in W x 15.2 in H x 9.5 in D) Weight. . . . . . . . . . . . . . . . . . . . . . . . 10.6 kg (23.3 lb) with tribrach and no battery; 11.0 kg (24.3 lb) with tribrach and battery Power supply . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 mm W x 43 mm H x 130 mm D (3.0 in W x 1.7 in H x 5.1 in D); Weight: 0.66 kg (1.46 lb) Power consumption. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72 W Instrument case . . . . . . . . . . . . . . . . . . . . . . . 500 mm W x 366 mm H x 625 mm D (19.7 in W x 14.4 in H x 24.6 in D)
Scanning principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Vertically rotating mirror on horizontally rotating base Range principle. . . . . . . . . . . . . . . . . . . . . . . Ultra-high speed time-of-flight powered by Trimble Lightning™ technology Measurement rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 MHz Maximum range. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120 m on most surfaces 340 m with optional upgrade Range noise. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . <2 mm on most surfaces
True performance in real world environments
Intuitive and easy to operate
With the TX8’s ability to capture precise high-density 3D data combined with Trimble RealWorks software advanced modeling, analysis, and data management tools, the Trimble TX8 laser scanner is the complete scanning solution for Geospatial professionals.
Data integrates with other Trimble survey instruments
High Performance for Demanding Applications
The Trimble TX8 is ideal for capturing detailed data on existing conditions. Making high-speed measurements without compromising range or precision, the Trimble TX8 delivers high-density 3D point clouds needed by design and analysis professionals. The Trimble TX8 provides a 360 degree x317 degree field of view and captures data at one million points per second with a typical scan time of only 3 minutes. The TX8 maintains its high precision over its entire range of 120 m and is available with an optional upgrade extending the range to an impressive 340 m.
Confidence in data accuracy, clarity and richness
A Revolution in 3D Scanning
The Trimble TX8 combines speed and range to reduce the time and effort for 3D scanning. The TX8 lets you gather data more quickly from each setup while the scanner’s long range reduces the number of setups needed to do the job. As a result, you’ll finish your projects faster and with the confidence that your data is complete and accurate. Using Trimble’s patented Lightning™ technology, the Trimble TX8 can measure one million points per second while capturing precise data over its full measurement range. Because Trimble Lightning technology is less susceptible to variation in surface types and atmospheric conditions, you can capture complete datasets from each station. The Trimble TX8 streamlines work in the office as well. The scanner’s clean, low-noise data results in less time for processing. Data from the Trimble TX8 loads directly into Trimble RealWorks® and Trimble Scan Explorer software. The Trimble TX8 paired with Trimble RealWorks also provides efficient dataflow into popular CAD programs.
ቤተ መጻሕፍቲ ባይዱ
The Total Solution
The Trimble TX8 is designed for a broad array of uses and environments. Typical applications include: • • • • • • • • • • Plant and industrial measurement Civil engineering Surveying Mining and quarries Building and commercial construction Architecture and design Preservation and restoration Deformation monitoring Quality control Accident investigation