机器人辅助椎弓根螺钉置钉的准确性观察
计算机导航引导下脊柱后路椎弓根螺钉置入内固定:准确性及安全性
骨 钌 :治疗 计算 祝辕 助 : 内固定器 :脊 柱 基 金资 助 : 广 西秘 学磺 究与 技术 开 发诗 项 g l 桂科 攻 :1 2 9 8 0 0 3 - 5 — 1 .2 0 1 2 一 k y O 0 一 ’ 0 )
摘 要 背 景 :脊 柱后 路椎 弓根螺 钉置 入 内 固定是 治疗 脊 柱各 种病 变及 稳 定脊 柱 的重要 手段 ,计算机 导航技 术 可 以完
计算机导航引导下脊柱后路椎弓根螺钉置入内固定:准确性及安全性
陈晓明,肖增明,宗少晖,陈前芬( 广西医科大学第一附属 医院脊柱骨病外科,广西壮族 自治区南宁市 5 3 0 0 2 1 )
文 章 亮点 :
1 脊柱 后路 椎 弓根 螺钉 内固定 是治 疗脊 柱各 种病 变 及稳 定脊 柱 的重 要手 段 ,计算 机 导航技 术 给术 者提 供 实时 的 、多 维的 清晰 图像 ,利于 术者 准 确地 按照 计算 机 设计 的精 确进 钉 路线 进行 椎 弓根 螺钉 内固定 ,使 置钉 准确
关键词:
通讯 作者 :陈前 芬 ,博士 , 主任 医师 ,广 西 医科 大学 第一附属医院脊柱骨 病外 科 , 广西 壮族 自治 区 南 宁
市 53 0 0 21
植 入物 :脊 拄植 入 物 计算 机导 航 :脊柱 :三 维重 建 :稚 弓根 螺钌 : 内固定 :准确 率 :安 全性
度。
陈 晓 明. 肖增 明. 宗少 晖 .陈前 芬.计算 机 导航 导 下脊 柱后 路椎 弓根螺 钌置 入 内固 定:准 确 性及 安全 性 中国组 织I 程研 究 .2 0 1 5 .1 9 ( 1 3 1 : 2 1 1 9 - 2 1 2 4
d o i : l 0 . 3 9 6 9  ̄ . i s s n . 2 0 9 5 - 4 3 4 4 . 2 0 1 5 . 1 3 . 0 2 8
骨科手术机器人系统辅助置入颈椎椎弓根螺钉的安全性研究
骨科手术机器人系统辅助置入颈椎椎弓根螺钉的安全性研究摘要:随着科学技术发展,计算机导航系统也不断发展。
尽管传统的航行方式可以椎弓根螺钉置钉提高精度,但仍存在不足。
徒手置钉的钉点及钉道方向是通过2D和3D图像恢复实时确定的,而3D空间清晰度和实用技能对置钉准确性有很大影响,不同操作员或技术之间的一致性较低。
为了解决这一问题,提出了一种基于“C”型臂X线机透视人操作系统。
操作员只需在图像中规划针路径,并在指定位置控制操纵器。
机械臂末端的套筒钉点及钉道可以准确其方向,有效地减少了理论上的人为错误。
关键词:机器人手术;颈椎;椎弓根钉于1994年首次应用颈椎椎弓根螺钉,由于良好的生物稳定性,骨质疏松、颈椎畸形和颈椎修复被广泛应用。
然而,由于颈椎解剖结构精细、弓根置钉间距小、低容错率、置入颈椎椎弓根螺钉技术要求高、徒手置钉学习曲线长以及螺钉固定不当,会导致严重的神经或血管并发症,其错误率在7.05至29.0%之间。
一、资料与方法1.纳入与排除。
纳入标准:颈椎后路固定可包括任何C1至C7节段;骨科机器人系统用于固定颈椎的背部。
最重要的评估指标是机器人系统的使用时间、螺钉置入角度和螺钉精度。
排除标准:术前颈椎弓根CT显示解剖变异;术前颈椎弓根CT扫描显示小于螺钉直径(3.5mm);术前单侧脊动脉CTA显示狭窄或闭合;跟踪数据不完整。
2.资料。
2019.3月至2021.2月,机器人进行了38例后路颈椎固定手术,其中5次被排除在术后CT后路颈椎扫描之外,包括33名患者,19名男性和14名女性。
平均年龄50.5岁。
上颈椎骨折14例,其中上下颈椎骨折1例,颈椎脊髓损伤椎管狭窄2例,9例管狭窄,颈椎畸形2例,术后颈椎病2例,3例管内肿瘤。
术前进行影像学检查,包括X线、CT和颈椎重建、椎动脉和颈椎MRI。
观察了33例患者无脊椎动脉的发育和行走变化。
3.方法。
体位与显露,使用全身麻醉将头部头架固定取俯卧位,铺单消毒,获得正中纵向切口,露出椎椎板体侧面、目标节段棘突。
机器人辅助与徒手椎弓根螺钉置入在脊柱疾病应用效果的meta分析
㊃循证研究㊃基金项目:合肥市卫健委2021年度应用医学研究项目E n d o -U L B D 治疗退行性腰椎管狭窄症的临床疗效(2021001)通信作者:杜怡斌,E m a i l :d o d o 1108@163.c o m机器人辅助与徒手椎弓根螺钉置入在脊柱疾病应用效果的m e t a 分析李 杨,杜怡斌(安徽医科大学第三附属医院脊柱外科,安徽合肥230061) 摘 要:目的 比较机器人辅助与徒手置钉两种不同椎弓根螺钉置入方式在脊柱手术中的临床效果,为未来脊柱外科发展方向提供一定理论参考㊂方法 检索2011年2月至2021年2月发表的相关病例对照研究㊂检索包括P u b m e d ㊁C o c h r a n eL i b r a r y㊁C N K I ㊁E m b a s e ㊁W F ㊁V I P 在内的6个数据库㊂依据中英文检索策略,共检索到文献418篇,根据条件进一步筛选后最终纳入13篇文献㊂提取本文所需数据并使用R e v i e w m a n a g e r 5.3软件进行分析㊂结果 机器人辅助下置钉较徒手透视引导下置钉准确度较高(95%C I =2.19~3.61,P <0.01);机器人辅助下与透视引导下置钉手术所需时间相当(95%C I =-0.18~33.96,P =0.05),其余指标均差异无明显统计学意义㊂结论 机器人辅助下较传统徒手置钉准确度更高,是当下治疗脊柱疾病的更安全精准的选择,且机器人术中所需时间㊁辐射强度及时间呈现下降趋势,在未来脊柱外科的手术中将起重要作用㊂关键词:机器人手术;透视引导;椎弓根螺钉;置钉准确度;手术时间中图分类号:R 61 文献标志码:A 文章编号:1004-583X (2023)03-0208-08d o i :10.3969/j.i s s n .1004-583X.2023.03.002M e t a -a n a l y s i s o f t h e e f f e c t o f r o b o t -a s s i s t e da n d f r e e -h a n d e d p e d i c l e s c r e w p l a c e m e n t i n s pi n a l d i s e a s e s L iY a n g,D uY i b i n D e p a r t m e n t o f S p i n eS u r g e r y ,t h eT h i r dA f f i l i a t e d H o s p i t a l o f A n h u iM e d i c a lU n i v e r s i t y ,H e f e i 230061,C h i n a C o r r e s p o n d i n g au t h o r :D uY i b i n ,E m a i l :d o d o 1108@163.c o m A B S T R A C T :O b j e c t i v e T o c o m p a r et h ec l i n i c a le f f e c t s o fr o b o t -a s s i s t e d v e r s u sf r e e -h a n d e d p e d i c l es c r e w p l a c e m e n t i ns p i n a ls u r g e r y ,a n dt o p r o v i d eat h e o r e t i c a lr e f e r e n c ef o rt h ef u t u r ed e v e l o p m e n to fs p i n a ls u r g e r y.M e t h o d s W e s e a r c h e d r e l a t e dc a s e -c o n t r o l s t ud ie s p u b l i s h e df r o m F e b r u a r y 2011t oF e b r u a r y 2021,i ns i xd a t a b a s e s i n c l u d i ng P u b m e d ,C o ch r a n eLi b r a r y ,C N K I ,E m b a s e ,W Fa n d V I P .A c c o r d i n g t o C h i n e s ea n d E n gl i s hr e t r i e v a l s t r a t e g i e s ,r e t r i e v e de l i g i b l e418d o c u m e n t s ,f u r t h e rs c r e e n e da n df i n a l l y i n c l u d e d13d o c u m e n t s .I nt h i s p a pe r ,w e e x t r a c t e da n da n a l y z e d t h e d a t ab y R e v i e w m a n a ge r 5.3s of t w a r e .R e s u l t s W h e n p e d i c l e s c r e w sw e r eu s e d t o p l a c e d ,t h e a c c u r a c y o f r o b o t -a s s i s t e d p l a c e m e n tw a sh igh e r t h a n t h a t o f f r e e -h a n d f l u o r o s c o p y -g ui d e d (95%C I =2.19-3.61,P <0.01).T h e t i m e r e q u i r e d f o r r o b o t -a s s i s t e d a n d f l u o r o s c o p y -g u i d e dw a s s i m i l a r (95%C I =-0.18-33.96,P =0.05),b u t t h eo t h e ri n d i c a t o r s w e r ec o m p a r a b l eb e t w e e n g r o u p s .C o n c l u s i o n R o b o t -a s s i s t e ds c r e w p l a c e m e n ti s m o r e a c c u r a t e t h a n t r a d i t i o n a l f r e e h a n d s c r e w p l a c e m e n t ,w h i c h i s am o r e a c c u r a t e a n d s a f e c h o i c e f o r t h e t r e a t m e n t o f s p i n a l d i s e a s e s .M o r e o v e r ,t h e o p e r a t i o n t i m e ,r a d i a t i o nd o s ea n dt i m eo f r o b o t -a s s i s t e dt e n dt od e c l i n e ,w h i c hw i l l p l a y a n i m p o r t a n t r o l e i n s p i n a l s u r g e r yi n t h e f u t u r e .K E Y W O R D S :r o b o t i c s u r g i c a l p r o c e d u r e s ;f l u o r o s c o p y -g u i d e d ;p e d i c l e s c r e w ;s c r e w p l a c e m e n t a c c u r a c y ;o pe r a t i v e t i m e 临床在治疗脊柱退变性疾病及脊柱骨折等常见疾病时,常需置入椎弓根螺钉以提供内固定㊂以往的椎弓根螺钉主要靠徒手置入,过程中可能存在过深㊁过浅㊁角度及进针点不正确等问题,往往需要靠术中透视结合手术经验来确定,因位置偏差问题引起并发症可达16.1%[1]㊂至2001年,以色列T e c h n i o n 公司研发推出S P I N E A S S I S T 系统机器人,该机器人为椎弓根螺钉的置入提供了精确方向导引[2]㊂国内在骨科机器人的研发及应用方面也有所进展,如国内 天玑 骨科机器人于2015年首度在临床中完成颈椎手术[3]㊂其主要工作原理是对患者进行C T 断层扫描,在机器人系统中重建并测量,从而确定最佳进针点及深度,规划出最佳方案[4]㊂机器人的出现,使得临床中对徒手置钉的准确性㊁安全性及有效性等产生了一定的质疑,现关于这两种置钉方式使用的优劣点仍存争议㊂本文拟通过m e t a 分析的方法对两种手术方式的不同特点进行比较,为未来脊柱外科的发展方向提供一定理论参考㊂㊃802㊃‘临床荟萃“ 2023年3月20日第38卷第3期 C l i n i c a l F o c u s ,M a r c h20,2023,V o l 38,N o .3Copyright ©博看网. All Rights Reserved.1资料与方法1.1检索策略经作者筛选后,本文检索了包括P u b m e d㊁C o c h r a n e L i b r a r y㊁C N K I㊁E m b a s e㊁W F㊁V I P在内的共6个数据库,尽量保证数据可靠性㊂研究中对杂志目录及相关参考文献进行检索,时间范围为2011年2月至2021年2月国内外发表的病例对照实验研究㊂中文关键词是 椎弓根螺钉㊁机器人辅助㊁透视引导㊁徒手置钉 ,英文关键词是 R o b o t a s s i s t e d㊁F l u o r o s c o p y-g u i d e d㊁F r e e h a n d㊁P e d i c l e s c r e w ;检索策略分别略是 椎弓根螺钉且机器人辅助或透视引导或徒手置钉 及 P e d i c l e s c r e wA N DR o b o t-a s s i s t e dO RF l u o r o s c o p y-g u i d e dO RF r e e h a n d ㊂检索语言不限,最大程度保证数据完整性㊂1.2纳入标准 ①病例对照试验㊁回顾性研究或队列研究;②干预措施:试验组使用机器人辅助下椎弓根螺钉置入;对照组则使用透视引导下徒手置钉术;③根据病史㊁查体及辅助检查明确诊断为脊柱疾病并且有手术指征需行椎弓根螺钉置入的患者㊂1.3排除标准①文献类型为个例报告㊁评论文献㊁研究进展及综述等非病例对照研究;②研究指标不相关;③干预措施不符合要求;④重复报告;⑤文献中数据及资料不够完整㊂1.4结局指标椎弓根置钉准确度㊁并发症及翻修发生例数㊁术中辐射强度㊁辐射时间㊁术后目测类比评分(v i s u a l a n a l o g u e s c a l e,V A S)㊁术中所需时间及住院时长共7项指标㊂1.5文献质量评价及资料提取严格按照C o c h r a n e偏倚风险评价工具进行评价,其中包括试验是否遵守随机分配㊁盲法原则㊁有效隐藏㊁数据完整性㊁有无选择性报告结果㊁其他偏倚因素㊂为了避免过低质量文献影响结论可靠性,通读全文后汇总分数,本文选用改良J a d a d评分法对文章质量进行评价,适当的随机顺序得2分,适当的盲法得2分,适当的随机化隐蔽性得2分,撤出理由充分得1分,文献总分4~7分,视为高质量案例研究文献㊂为了保证文献的可靠性,研究者事先根据本文需要的数据编制了内容抽取表,由两名研究者逐一抽取本文需要的内容,评价后决定是否纳入研究㊂若意见不同则加入研究者再次讨论㊂1.6统计学方法使用R e v M a n5.3软件进行数据分析㊂椎弓根置钉准确度㊁术中辐射强度㊁术中辐射时间㊁术后V A S㊁术中所需时间及住院时长为连续性变量,采用均数ʃ标准差(x-ʃs)及95%C I进行表示,并发症及翻修例数为二分类变量,采用比数比(O R)及95%C I进行表示㊂对各项数据采用P值和I2值评价其异质性大小㊂当Pȡ0.1,I2ɤ50%时,即各文献间异质性较小,采用固定效应模型进行分析;如果P<0.1,I2>50%,即各文献间异质性较大,采用随机效应模型进行分析㊂P<0.05为差异有统计学意义㊂2结果2.1纳入文献的基本情况通过本文检索方法对数据库进行全面检索后,共检索出418篇有效文献㊂首先阅读文献的标题和摘要,删除重复文献,得出81篇相关文献,不包括病例报告㊁研究进展和综述研究㊁不同研究内容的临床研究㊁非人类试验和重复报告㊂翻译文献并精读全文,研究者根据纳入和排除标准仔细检查,排除研究内容及干预方式不同等的文献后,最终有13篇论文被纳入本研究[5-17],见图1㊂图1文献筛选流程图F i g.1 F l o wc h a r t o f d o c u m e n t s s c r e e n i n g2.2纳入文献的质量评价此研究纳入7篇随机对照研究及6篇回顾性研究,采用改良J a d a d评分法进行质量评价,其中3篇文献7分,5篇文献6分,5篇文献5分,纳入文献大体质量较高㊂从以上13篇文献中提取患者的性别㊁年龄等临床特征,差异无统计学意义(P>0.05)㊂见表1㊂2.3 M e t a分析结果2.3.1椎弓根置钉准确度依据手术方式不同,将文献分为两大组即机器人辅助组与透视引导组,在机器人辅助组中,由于置钉方式的不同可将患者分为经皮置钉组(7篇)以及开放置钉组(5篇),分别纳入数据对比各组间置钉准确度(采用G e r t z b e i n-R o b b i n s分类法),异质性分析表明:各结果及亚组间不存在异质性(I2<50%),故采用固定效应模型进㊃902㊃‘临床荟萃“2023年3月20日第38卷第3期 C l i n i c a l F o c u s,M a r c h20,2023,V o l38,N o.3Copyright©博看网. All Rights Reserved.行m e t a分析㊂M e t a分析结果显示,在通过椎弓根置钉治疗脊柱疾病时,经皮机器人辅助下置钉的准确度优于透视引导下徒手置钉(95%C I=1.62~ 3.18,P<0.01);选择开放置钉方式后,机器人辅助下置钉仍较准确(95%C I=1.38~3.92,P= 0.002);将13篇文献汇总比较,机器人辅助组与徒手置钉组比较后发现机器人辅助下置钉准确度较高(95%C I=2.19~3.61,P<0.01),见图2㊂2.3.2并发症及翻修例数根据术后并发症及翻修发生情况分成两个亚组,其中并发症发生情况纳入了6篇文献,翻修情况纳入5篇文献,分别纳入数据对比,异质性分析表明:各结果及亚组间不存在异质性(I2<50%),故采用固定效应模型进行m e t a分析㊂M e t a分析结果显示,在通过椎弓根置钉治疗脊柱疾病时,机器人与透视引导下置钉术后并发症发生例数情况相当(95%C I=0.33~1.66,P= 0.47)㊂且术后翻修例数差距也较小(95%C I= 0.29~1.39,P=0.26),见图3㊂2.3.3术中辐射强度统计数据后共纳入6篇符合要求文献,对不同手术方式下术中辐射强度进行比较,异质性分析表明:各研究结果间存在明显异质性(P<0.01,I2=98%),进一步分析,将文献逐一剔除并对剩余文献进行敏感性分析,异质性并未明显改变,证实了该m e t a分析结果较可靠,作者认为可能的异质性来源于早期使用机器人辅助置钉处于探索阶段,操作生疏导致术中辐射强度较大,近年研究呈现逐渐相反趋势更能说明该问题,故采用随机效应模型进行m e t a分析㊂M e t a分析结果显示,机器人辅助下置钉与透视引导下徒手置钉术中辐射强度相当(95%C I=-1.62~-0.33,P=0.19),见图4㊂2.3.4术中辐射时间统计数据后纳入8篇符合要求文献,对不同手术方式下术中辐射时间进行比较,异质性分析表明:各研究结果间存在明显异质性(P<0.01,I2=98%),作者认为可能的异质性来源于早期术者对复杂的机器人操作并不熟练,且经验不同术者在术中所需辐射时间差距较大,故采用随机效应模型进行m e t a分析㊂M e t a分析结果显示,在机器人辅助下与透视引导下置钉术中辐射时间相当(95%C I=-11.57~13.32,P=0.89),见图5㊂表1纳入文献基本特征表T a b.1 B a s i c c h a r a c t e r i s t i c s o f d o c u m e n t s i n c l u d e d纳入研究类型国家年份组别例数年龄(岁)性别(男/女)结局指标改良J a d a d质量评价(分)R i n g e l[5]随机对照德国2012机器人辅助306814/16①②④⑥⑦7透视引导306712/18F e n g[6]随机对照中国2019机器人辅助4067.6ʃ6.512/28①③⑥⑦5透视引导4067.9ʃ7.313/27K e r i c[7]回顾性德国2017机器人辅助5272.3ʃ11.136/30①②④⑤⑥⑦6透视引导7068.0ʃ11.213/11H y u n[8]随机对照韩国2017机器人辅助3066.59/21①③④⑤⑥⑦7透视引导3066.88/22K i m[9]随机对照韩国2015机器人辅助2064.4ʃ11.911/9①⑥6透视引导2064.7ʃ8.68/12L a u t a d o[10]回顾性瑞士2018机器人辅助1165-①5透视引导4860.7S c h i z a s[11]随机对照瑞士2012机器人辅助11656/5①③④6透视引导23668/15K a n t e l h a r d t[12]回顾性德国2011机器人辅助5563.152/60①②④⑥⑦6透视引导57L o n j o n[13]随机对照法国2016机器人辅助1063.4ʃ11.04/6①②③④⑥⑦7透视引导104/6H a n[14]回顾性中国2019机器人辅助5254.6ʃ11.355/60①③④⑥⑦5透视引导7056.1ʃ13.458/61S c h a t l o[15]回顾性德国2014机器人辅助5552(27-83)29/26①②⑥⑦6透视引导4058(23-82)28/12R o s e r[16]回顾性德国2013机器人辅助18--①③④5透视引导10田伟[17]随机对照中国2016机器人辅助2354.9ʃ11.917/23①⑥5透视引导17注:①为椎弓根置钉准确度;②为并发症及翻修发生例数;③为术中辐射强度;④为术中辐射时间;⑤为目测类比评分(V A S);⑥为术中所需时间;⑦为住院时长㊃012㊃‘临床荟萃“2023年3月20日第38卷第3期 C l i n i c a l F o c u s,M a r c h20,2023,V o l38,N o.3Copyright©博看网. All Rights Reserved.图2 两组置钉准确度比较的森林图F i g .2 F o r e s tm a p o f a c c u r a c y o f p e d i c l e s c r e w p l a c e m e n t g u i d e db y r o b o t a n d f r e e -h a n d ed 图3 两组术后并发症及翻修例数比较的森林图F i g .3 F o r e s tm a p o f c o m p l i c a t i o n s a n d r e v i s i o n c a s e s o f p e d i c l e s c r e w p l a c e m e n t g u i d e db y r o b o t a n d f r e e -h a n d ed 图4 两组术中辐射强度比较的森林图F i g .4 F o r e s tm a p o f i n t r a o p e r a t i v e r a d i a t i o n i n t e n s i t y o f p e d i c l e s c r e w p l a c e m e n t g u i d e db y r o b o t a n d f r e e -h a n d e d ㊃112㊃‘临床荟萃“ 2023年3月20日第38卷第3期 C l i n i c a l F o c u s ,M a r c h20,2023,V o l 38,N o .3Copyright ©博看网. All Rights Reserved.图5 两组术中辐射时间比较的森林图F i g .5 F o r e s tm a p o f i n t r a o p e r a t i v e r a d i a t i o n t i m e o f p e d i c l e s c r e w p l a c e m e n t g u i d e db y r o b o t a n d f r e e -h a n d e d 2.3.5 术后V A S 背部V A S 情况纳入了2篇文献,下肢V A S 情况纳入2篇文献,对比在不同手术方式下术后V A S 情况,异质性分析表明:各结果及亚组间不存在异质性(I 2<50%),故采用固定效应模型进行m e t a 分析㊂M e t a 分析结果显示,在通过椎弓根置钉治疗脊柱疾病时,机器人与透视引导下置钉术后背部V A S 分数相当(95%C I =-1.29~0.66,P =0.53),下肢V A S 分数也相当(95%C I =-1.30~0.23,P =0.17),见图6㊂2.3.6 术中所需时间 纳入10篇文献比较在不同手术方式下术中所需时间,异质性分析表明:各研究结果间存在明显异质性(P <0.01,I 2=98%),进一步分析,将文献逐一剔除并对剩余文献进行敏感性分析,最终发现异质性无明显改变,证实了该m e t a分析结果较可靠,作者认为可能的异质性来源于不同国家医疗条件㊁制度下,导致住院时长可能存在差异;其次脊柱疾病患者平均年龄较大,不同患者身体状况差距较大,可能导致住院时长存在差异,故采用随机效应模型进行m e t a 分析㊂M e t a 分析结果显示,在机器人辅助下与透视引导下置钉手术所需时间相当(95%C I =-0.18~33.96,P =0.05),见图7㊂2.3.7 住院时长 纳入8篇符合要求文献,比较在不同手术方式下手术前后住院总时长,异质性分析表明:各结果及亚组间不存在异质性(I 2<50%),故采用固定效应模型进行m e t a 分析㊂M e t a 分析结果显示,在机器人辅助下与透视引导下置钉手术前后住院所需时间相当(95%C I =-0.47~0.16,P =0.33),见图8㊂图6 两组术后V A S 分数比较的森林图F i g .6 F o r e s tm a p o f p o s t o p e r a t i v eV A Ss c o r e o f p e d i c l e s c r e w p l a c e m e n t g u i d e db y r o b o t a n d f r e e -h a n d ed 图7 两组术中所需时间比较的森林图F i g .7 F o r e s tm a p o f o p e r a t i o n t i m e o f p e d i c l e s c r e w p l a c e m e n t g u i d e db y r o b o t a n d f r e e -h a n d e d ㊃212㊃‘临床荟萃“ 2023年3月20日第38卷第3期 C l i n i c a l F o c u s ,M a r c h20,2023,V o l 38,N o .3Copyright ©博看网. All Rights Reserved.图8 两组住院时长比较的森林图F i g .8 F o r e s tm a p o f h o s p i t a l i z a t i o n t i m e o f p e d i c l e s c r e w p l a c e m e n t g u i d e db y r o b o t a n d f r e e -h a n d e d 2.4 发表偏倚及敏感性分析 选择R e v M a n 5.3软件对椎弓根置钉准确度㊁术后并发症发生率㊁术后翻修率㊁术中辐射强度㊁术中辐射时间㊁术后背部V A S评分㊁术后下肢V A S 评分㊁术中所需时间和住院时长分别绘制漏斗图,结果提示各漏斗图直观下基本对称,无明显发表偏倚存在㊂见图9㊂3 讨 论脊柱疾病主要以脊柱损伤及脊柱退行性疾病为主,治疗方式主要包括保守治疗与手术治疗,其中手术治疗短期缓解疼痛效果好,术后长期临床效果及复发率较低[18-20]㊂随着人群平均寿命的延长以及医疗条件的普及,脊柱疾病尤其是退行性疾病在手术量上近年呈递增趋势,有学者对医院最近的5万多台脊柱手术进行统计分析,其中手术量每年增加约4倍,70岁以上的人群增长近20倍[21]㊂但考虑到脊柱疾病患者平均年龄较大㊁合并基础疾病较多,导致对手术耐受性较差[22-23],所以如何减少脊柱手术风险及术后并发症情况等成为当下研究热点㊂脊柱手术中,大多采用椎弓根螺钉置入,以利于生物力学的重建,维持脊柱稳定性[24]㊂在常规的后路手术中,向椎弓根置钉时,由于椎弓根旁有脊髓㊁神经根㊁椎间盘等结构,对于椎弓根入路有着很高的㊃312㊃‘临床荟萃“ 2023年3月20日第38卷第3期 C l i n i c a l F o c u s ,M a r c h20,2023,V o l 38,N o .3Copyright ©博看网. All Rights Reserved.要求,当钉道偏离后可能产生椎弓根穿透,对术后即时和长期神经功能可能产生不可逆性影响,甚至有二次手术可能[25]㊂近年,骨科机器人发展迅速,其将术前影像资料及术中断层扫描数据相结合,通过数据处理,自动确定最佳进针点,具有精度高㊁稳定性强㊁手术创伤少㊁术后临床效果好等特点[26-27]㊂但也有学者提出不同观点,指出由于椎体结构和形态具有复杂多变性,尤其当合并有脊柱畸形时,即使使用机器人辅助也可能在置钉时出现部分偏差[28]㊂本次m e t a分析将脊柱手术中最为关键的椎弓根置钉准确度㊁并发症及翻修例数㊁术中辐射强度㊁术中辐射时间㊁术后目测类比评分㊁术中所需时间及住院时长共7项结局指标作为提取的数据,比较在机器人辅助下与透视引导下两种手术方式下置钉的准确性及安全性的差异㊂通过比较发现,不论是经皮(95%C I=1.62~3.18,P<0.01)或开放下(95%C I=1.38~3.92,P=0.002),机器人辅助组的置钉准确度优于透视引导组(95%C I=2.19~ 3.61,P<0.01),而在机器人辅助下与透视引导下置钉手术所需时间相当(95%C I=-0.18~33.96, P=0.05);相反的是,机器人辅助组及徒手置钉组的并发症(95%C I=0.33~1.66,P=0.47)及翻修例数(95%C I=0.29~1.39,P=0.26)㊁术中辐射强度(95%C I=-1.62~-0.33,P=0.19)㊁背部V A S分数(95%C I=-1.29~0.66,P=0.53)㊁下肢V A S分数(95%C I=-1.30~0.23,P=0.17)㊁住院时长(95%C I=-0.47~0.16,P=0.33)均相当㊂当然,现今机器人资源的缺乏及操作的复杂性是阻碍其发展的重要障碍;在使用过程中,患者对其信任程度及相关费用也导致机器人技术的应用不尽如人意㊂值得注意的是,在术中辐射强度㊁辐射时间及术中所需时间比较中,近年呈现出逐渐减少趋势,据此作者认为,当机器人辅助技术普及加上术者经验逐渐积累后,机器人辅助所需时间及辐射可能会越来越少,加上其安全性及准确性较高,在未来脊柱外科的应用将愈加广泛,此外该趋势也可能是导致本研究相关数据异质性较大的重要原因㊂综上,在脊柱手术的应用中,机器人辅助下相较于传统透视引导下椎弓根置钉效果更好,能更加准确地置入椎弓根螺钉,并且随着科技的进步和普及可以更加高效地置入螺钉,是未来脊柱手术中具有潜力的手术方式之一㊂本研究尚存以下不足:(1)本文共引入13篇文献,其中7篇为随机对照试验,证据等级不高;(2)术后V A S分数比较只纳入2篇文献,数量较少,可能增加组间异质性,且可能导致偏倚;(3)机器人种类未做细分,若将不同机器人分成不同亚组比较,数据可能更加可靠;(4)机器人在三维成像及数据处理中,可能产生系统误差㊂因此,需要更加大量的随机对照试验进一步加强验证㊂参考文献:[1] N a s s e rR,Y a d l aS,M a l t e n f o r t M G,e ta l.C o m p l i c a t i o n s i ns p i n e s u r g e r y[J].JN e u r o s u r g S p i n e,2010,13(2):144-157.[2] T o g a w a D,K a y a n j a MM,R e i n h a r d t MK,e t a l.B o n e-m o u n t e d m i n i a t u r e r o b o t i c g u i d a n c ef o r p e d i c l e s c r e w a n d t r a n s l a m i n a rf a c e t s c r e w p l a c e m e n t:P a r t2--E v a l u a t i o n o f s y s t e ma c c u r a c y[J].N e u r o s u r g e r y,2007,60(2S u p p l1): S129-S139.[3]田伟,王晋超,刘亚军,等.上颈椎手术方式回顾及应用机器人辅助上颈椎手术的体会[J].中国医疗器械信息,2017,23(7):9-13.[4]J o s e p hJ R,S m i t hB W,L i uX,e t a l.C u r r e n t a p p l i c a t i o n so fr o b o t i c s i n s p i n e s u r g e r y:As y s t e m a t i c r e v i e wo f t h e l i t e r a t u r e[J].N e u r o s u r g F o c u s,2017,42(5):E2.[5] R i n g e lF,S t u e r C,R e i n k e A,e ta l.A c c u r a c y o fr o b o t-a s s i s t e d p l a c e m e n to fl u mb a ra n ds ac r a l p ed i c l es c re w s:Ap r o s p e c t i v er a n d o m i z e dc o m p a r i s o nt oc o n v e n t i o n a lf r e e h a n d s c r e wi m p l a n t a t i o n[J].S p i n e(P h i l aP a1976),2012,37(8): E496-E501.[6] F e n g S,T i a n W,S u n Y,e ta l.E f f e c t o fr o b o t-a s s i s t e ds u r g e r y o nl u m b a r p e d i c l es c r e wi n t e r n a l f i x a t i o ni n p a t i e n t sw i t ho s t e o p o r o s i s[J].W o r l d N e u r o s u r g,2019,125:e1057-e1062.[7] K e r i cN,E u m D J,A f g h a n y a rF,e t a l.E v a l u a t i o no f s u r g i c a ls t r a t e g y o f c o n v e n t i o n a l v s.p e r c u t a n e o u s r o b o t-a s s i s t e d s p i n a l t r a n s-p e d i c u l a r i n s t r u m e n t a t i o n i n s p o n d y l o d i s c i t i s[J].JR o b o t S u r g,2017,11(1):17-25.[8] H y u nS,K i m K,J a h n g T,e t a l.M i n i m a l l y i n v a s i v er o b o t i cv e r s u s o p e n f l u o r o s c o p i c-g u i d e d s p i n a l i n s t r u m e n t e d f u s i o n s:Ar a n d o m i z e d c o n t r o l l e d t r i a l[J].S p i n e,2017,42(6):353-358.[9] K i m H,L e eS H,C h a n g B,e ta l.M o n i t o r i n g t h e q u a l i t y o fr o b o t-a s s i s t e d p e d i c l es c r e w f i x a t i o ni nt h el u m b a rs p i n eb yu s i n g a c u m u l a t i v e s u mm a t i o n t e s t[J].S p i n e,2015,40(2): 87-94.[10] L a u d a t oP A,P i e r z c h a l aK,S c h i z a sC.P e d i c l e s c r e wi n s e r t i o na c c u r a c y u s i n g o-a r m,r ob o t ic g u id a n c e,o r f re e h a n dt e c h n i q u e:Ac o m p a r a t i v es t u d y[J].S p i n e(P h i l aP a1976), 2018,43(6):E373-E378.[11]S c h i z a sC,T h e i n E,K w i a t k o w s k iB,e ta l.P e d i c l es c r e wi n s e r t i o n:r o b o t i c a s s i s t a n c e v e r s u s c o n v e n t i o n a l C-a r mf l u o r o s c o p y.[J].A c t ao r t h o p a e d i c aB e lg i c a,2012,78(2):240-245.[12] K a n t e l h a r d t S R,M a r t i n e z R,B a e r w i n k e l S,e t a l.P e r i o p e r a t i v ec o u r s e a n d a c c u r a c y o f s c r e w p o s i t i o n i n g i nc o n v e n t i o n a l,o p e nr o b o t i c-g u ide da n d p e r c u t a n e o u sr o b o t i c-g u i d e d,p e d i c l es c r e w p l a c e m e n t[J].E u rS p i n eJ,2011,20(6):860-868.㊃412㊃‘临床荟萃“2023年3月20日第38卷第3期 C l i n i c a l F o c u s,M a r c h20,2023,V o l38,N o.3Copyright©博看网. All Rights Reserved.[13] L o n j o n N,C h a n-S e n g E,C o s t a l a t V,e ta l.R o b o t-a s s i s t e ds p i n es u r g e r y:F e a s i b i l i t y s t u d y t h r o u g ha p r o s p e c t i v ec a s e-m a t c h e d a n a l y s i s[J].E u r S p i n e J,2016,25(3):947-955.[14] H a nX,T i a n W,L i uY,e t a l.S a f e t y a n da c c u r a c y o f r o b o t-a s s i s t e dv e r s u s f l u o r o s c o p y-a s s i s t e d p e d i c l es c r e wi n s e r t i o ni nt h o r a c o l u m b a r s p i n a l s u r g e r y:A p r o s p e c t i v e r a n d o m i z e dc o n t r o l l ed t r i a l[J].JNe u r o s u r g S p i n e,2019:1-8.[15]S c h a t l oB,M o l l i q a j G,C u v i n c i u cV,e t a l.S a f e t y a n d a c c u r a c yo f r o b o t-a s s i s t e d v e r s u s f l u o r o s c o p y-g u i d e d p e d i c l e s c r e wi n s e r t i o nf o rd e g e n e r a t i v e d i s e a s e s o ft h el u m b a rs p i n e:Am a t c h e d c o h o r t c o m p a r i s o n[J].JN e u r o s u r g S p i n e,2014,20(6):636-643.[16] R o s e rF,T a t a g i b a M,M a i e r G.S p i n a lr o b o t i c s:C u r r e n ta p p l i c a t i o n s a n d f u t u r e p e r s p e c t i v e s[J].N e u r o s u r g e r y,2013,72(S u p p l1):12-18.[17]田伟,范明星,韩晓光,等.机器人辅助与传统透视辅助脊柱椎弓根螺钉内固定的临床对比研究[J].骨科临床与研究杂志,2016,1(1):4-10.[18] B y d o n M,A l v i M A,G o y a l A.D e g e n e r a t i v e l u m b a rs p o n d y l o l i s t h e s i s:D e f i n i t i o n,n a t u r a l h i s t o r y,c o n s e r v a t i v em a n a g e m e n t,a n ds u r g i c a l t r e a t m e n t[J].N e u r o s u r g C l i n NA m,2019,30(3):299-304.[19] M aX L,Z h a o XW,M aJ X,e ta l.E f f e c t i v e n e s so fs u r g e r yv e r s u sc o n s e r v a t i v et r e a t m e n tf o rl u m b a rs p i n a ls t e n o s i s:As y s t e m r e v i e w a n d m e t a-a n a l y s i s o f r a n d o m i z e d c o n t r o l l e d t r i a l s[J].I n t J S u r g,2017,44:329-338.[20] R u s t a g iT,D r a z i n D,O n e r C,e ta l.F r a c t u r e si n s p i n a la n k y l o s i n g d i s o r d e r s:An a r r a t i v e r e v i e wo f d i s e a s ea n d i n j u r yt y p e s,t r e a t m e n tt e c h n i q u e s,a n d O u t c o m e s[J].J O r t h o pT r a u m a,2017,31(S u p p l4):S57-S74.[21] A i z a w aT,K o k u b u nS,O z a w aH,e t a l.I n c r e a s i n g i n c i d e n c eo f d e g e n e r a t i v e s p i n a l d i s e a s e s i nJ a p a nd u r i n g25y e a r s:T h e r e g i s t r a t i o ns y s t e mo f s p i n a l s u r g e r y i n t o h o k uu n i v e r s i t y s p i n e s o c i e t y[J].T o h o k u JE x p M e d,2016,238(2):153-163. [22]J a i nA,H a s s a n z a d e hH,P u v a n e s a r a j a hV,e t a l.I n c i d e n c e o fp e r i o p e r a t i v e m e d i c a l c o m p l i c a t i o n s a n d m o r t a l i t y a m o n ge l d e r l y p a t i e n t s u n d e r g o i n g s u r g e r yf o r s p i n a l d e f o r m i t y:a n a l y s i so f3519p a t i e n t s[J].J N e u r o s u r g S p i n e,2017,27(5):534-539.[23] M i h a i l i d i s H G,M a n n e r s S,C h u r i l o v L,e t a l.I s s p i n a ls u r g e r y s a f e i no c t o g e n a r i a n s?[J].A N ZJ o u r n a l o fS u r g e r y, 2017,87(7-8):605-609.[24] L i u J M,Z h a n g Y,Z h o uY,e t a l.T h e e f f e c t o f s c r e wt u n n e l so nt h eb i o m e c h a n i c a l s t a b i l i t y o fv e r t e b r a lb o d y a f t e r p e d i c l e s c r e w s r e m o v a l:Af i n i t ee l e m e n ta n a l y s i s[J].I n t O r t h o p, 2017,41(6):1183-1187.[25] M a c-T h i o n g J M,P a r e n tS,P o i t r a s B,e ta l.N e u r o l o g i c a lo u t c o m e a n d m a n a g e m e n to f p e d i c l es c r e w s m i s p l a c e dt o t a l l yw i t h i n t h e s p i n a l c a n a l[J].S p i n e,2013,38(3):229-237.[26] D e v i t oD P,K a p l a nL,D i e t lR,e t a l.C l i n i c a l a c c e p t a n c ea n da c c u r a c y a s s e s s m e n t o f s p i n a l i m p l a n t s g u i d e dw i t hS p i n e A s s i s ts u r g i c a lr o b o t:R e t r o s p e c t i v e s t u d y[J].S p i n e(P h i l a P a 1976),2010,35(24):2109-2115.[27] L iW,L i G,C h e nW,e t a l.T h e s a f e t y a n d a c c u r a c y o f r o b o t-a s s i s t e d p e d i c l es c r e wi n t e r n a lf i x a t i o nf o rs p i n ed i s e a s e:Am e t a-a n a l y s i s[J].B o n e J o i n tR e s,2020,9(10):653-666.[28] W i e s n e rL,K o t h eR,S c h u l i t zK P,e t a l.C l i n i c a l e v a l u a t i o na n d c o m p u t e dt o m o g r a p h y s c a na n a l y s i so fs c r e wt r a c t sa f t e rp e r c u t a n e o u s i n s e r t i o no f p e d i c l es c r e w s i nt h el u m b a rs p i n e[J].S p i n e,2000,25(5):615-621.收稿日期:2022-09-06编辑:张卫国㊃512㊃‘临床荟萃“2023年3月20日第38卷第3期 C l i n i c a l F o c u s,M a r c h20,2023,V o l38,N o.3Copyright©博看网. All Rights Reserved.。
机器人辅助椎弓根螺钉置入治疗胸腰椎骨折的临床疗效Meta分析
149Meta-analysis of clinical efficacy of robot-assisted pedicle screw placement for the treatment of thoracolumbar vertebral fractures/Wang Lili 1, LYU Lanting 2, Liu Xinying 3, Chen Binbin 4 1Health Policy & Technology Assessment Center, Peking University, Beijing 100191, China; 2School of Public Administration and Policy, Renmin University of China, Beijing 100872, China; 3School of Business Administration, Shenyang Pharmaceutical University, Shenyang 110016, China; 4Beijing Medical and Health Economic Research Association, Beijing 100069, ChinaCorresponding author: [Abstract] Objective: T o analyze and compare the clinical efficacy of robot-assisted and conventional navigation-assisted percutaneous minimally invasive pedicle screw placement in the treatment of thoracolumbar fractures and to provide reference for clinical treatment decisions. Methods: A literature search was performed in China National Knowledge Infrastructure (CNKI), VIP , Wanfang and English databases PubMed and Web of science by using the keywords "vertebral pedicle screws," and "robot" in Chinese and "robot" and "pedicle screws" in English. The search time in both Chinese and English was from the establishment of the database to December 2022. The relevant clinical studies on robot-assisted and traditional navigation-assisted percutaneous minimally invasive pedicle screw placement for the treatment of thoracolumbar cone fractures were collected. Cochrane Scale and Newcastle -Ottawa Scale (NOS) were used to evaluate the quality of literatures and meta-analysis was carried out. The clinical effects of robot-assisted and traditional navigation-assisted surgery was compared. Results: A total of 15 articles were included in the study. Compared with traditional navigation-assisted percutaneous minimally invasive pedicle screw placement, robotic-assisted surgery resulted in shorter operative time [WMD =-11.45, 95%CI (-18.94~-3.95),P <0.05], less intraoperative bleeding [WMD =-19.11, 95%CI (-27.51~-10.70), P <0.001], higher screw placement accuracy [number of grade A nails: RR =1.20, 95%CI (1.16~1.25), P <0.001; number of grade A+B nails: RR =1.09, 95%CI (1.07~1.11), P <0.001], and fewer complications [RR =0.35, 95%CI (0.13~0.93), P <0.05]. The difference in hospitalization time was not statistically significant (P >0.05). Conclusion: In percutaneous minimally invasive pedicle screw placement for the treatment of thoracolumbar fractures, robot-assisted surgery has advantages over navigation-assisted surgery in terms of operative time, intraoperative bleeding, placement accuracy and complications.[Key words] Surgical robot; Pedicle screw placement; Thoracolumbar fracture; Meta-analysis[摘要] 目的:分析比较机器人辅助手术与传统导航辅助手术在经皮微创椎弓根螺钉置入治疗胸腰椎骨折的临床效果差异,为临床治疗决策提供参考。
无框架立体定向机器人引导颈椎弓根螺钉植入的实验研究
[ 摘要 ] 目的 探讨基 于虚拟现实可视化技术 的无框架 立体定向机器人 ( R S2型) CA一 引导颈椎 弓根螺钉
3例成人颅一 颈椎标本 , 以不 同单 一椎体作 为独 立 目标 分别进行 1f 的薄层 扫描 , l i m 不
植入 的可行性 。方法
同的椎 体图像序列分组在手术规划 工作站进行三维重建 。然后对标本 的颅颈和上位颈椎切开暴露 , 以完全暴 露 同一椎体 表面突出的 、 细小 的 、 唯一 的( T上能清晰显示 的) C 骨性标 志为准 ; 目标椎体 的薄层 C 在 T图像 上 ,
确性 。结果
无框架立体定 向机器人辅助椎 弓根 螺钉植入 2 5枚 ( 部分标 本 因为下颈椎 缺失 , 未行椎 弓根钢 无框架立体定 向机器人 引导 的颈椎 弓根螺钉
钉植 人 ) 钢钉完全与规划路径 吻合 , , 准确率 达到 10 。结论 0% [ 关键词 ]立体定 向 ; 螺钉植入 ; 颈椎椎 弓根 ; 机器人 [ 中图分 类号] R 8. 615 [ 文献标 志码 ]A
移动机械臂末端 的手术 导引探针 ; 当手术导引针 图像 的轴 向与预先设 计的轨迹 重合时锁定 机械臂 ; 在机械臂
末 端 的 操 作 把 持 平 台上 , 格 按 照 导 引 方 向 细 钻 钻 孔 后 , 入 导 向 钢 针 , 后 C 严 插 最 T复 查 验 证 导 向植 入 螺 钉 的 准
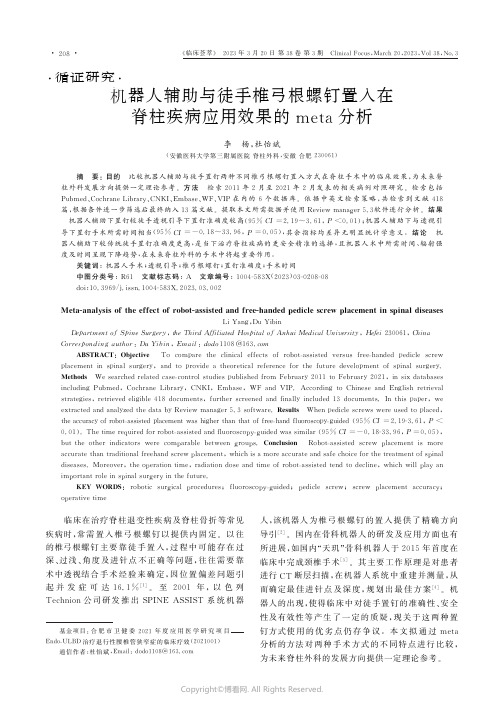
术 空 间中某 个 感 兴 趣 点 映 射 到 计 算 机 图 像 空 问 中 去, 描述 它们 之 间 的映射关 系 。 在 脊 椎 固定 螺 钉 植入 的过 程 中 , 手术 切 开 暴露 的椎板 、 块等 骨 J 侧 生结构掩 盖 其下走 行 的椎 弓根 、 椎
天玑骨科机器人辅助微创椎弓根钉置入的护理体会
"天玑 "骨科机器人辅助微创椎弓根钉置入的护理体会【摘要】目的:微创椎弓根钉置入术采用"天玑"骨科机器人辅助治疗时需与有效的护理手段配合,本文主要探究护理干预的应用价值。
方法:确定本实验主体为行椎弓根钉手术治疗的患者,选择患者病例数为100例,患者收入治疗的时间为2019.12-2020.12,全部患者奇偶法的干预下进行对比,将其中奇数日期入院的患者50作为对照组,偶数日期入院的患者为实验组,患者例数为50例,患者分别给予常规护理、护理干预,探究两组患者的护理结果。
结果:通过对两组患者的舒适评分、并发症发生率,数据之间存在显著差异(P<0.05)。
结论:天玑"骨科机器人辅助微创椎弓根钉置入术实施过中,需给予有效的护理手段干预,提高患者疾病治疗期间的舒适度,值得推广。
【关键词】"天玑"骨科机器人;微创椎弓根钉置入术;护理;体会微创椎弓根钉置入术是我国脊柱外科较为常用的手术方法,该种手术方法可使患者脊柱稳定性得以增强,利于脊柱功能的恢复。
与其他国家人群相比,我国人群胸腰椎椎弓根相对细小,发生病变的概率较高,生理解剖位置与神经根、血管的位置距离极近,手术过程中置钉位置需准确,否则可造成神经、血管损伤导致手术失败。
传统手术需在透视引导、辅助下完成置入,但人为操作可受到多种因素的影响,置入不当可引发的各种并发症[1]。
随着医疗技术的发展,"天玑"骨科机器人辅助手术在临床中得以应用,但仍需与有效的护理干预相配合,促进患者康复。
本文主要对护理干预的价值进行分析,如下。
1资料与方法1.1.一般资料本次实验的起止时间为2019.12-2020.12,将100例行"天玑"骨科机器人辅助微创椎弓根钉置入术的患者进行对比研究,实验组、对照组在奇偶法进行干预,各50例。
实验组、对照组患者的性别、年龄、病程等数据进行统计分析:24、26和25、25,(59.38±3.29)岁和(59.41±3.33)岁,(3.68±0.75)和(3.69±0.77)年,上述数据对比结果不具有差异性(P>0.05)。
机器人辅助椎弓根螺钉置钉的准确性观察
机器人辅助椎弓根螺钉置钉的准确性观察发表时间:2017-04-07T15:49:04.637Z 来源:《中国误诊学杂志》2017年第3期作者:张在田张绪华卫志华施傅森杨冬辉杨建丁[导读] 椎弓根螺钉固定技术是于1963年由国外Roy-Camille所提出并报道的。
怀化市中医医院脊柱外科湖南怀化 418000摘要:目的:分析机器人辅助椎弓根螺钉置钉的准确性。
方法:收集怀化市中医医院脊柱外科2016年12月~2017年3月行钉棒系统内固定手术的11例患者临床资料作为研究对象,其中6例机器人辅助置钉,共32枚椎弓根螺钉,设为观察组;5例医师徒手置钉,共30枚椎弓根螺钉,设为对照组。
分析临床资料进行回顾性研究,通过Gertzbein-Robbins标准评价机器人置钉的准确性,并统计分析两组患者术后并发症情况。
结果:由机器人成功辅助置入椎弓根螺钉31枚(观察组其中有1枚螺钉在手术中由于患者示踪器移动而改为徒手置钉,归为对照组),根据Gertzbein-Robbins标准,观察组最终结果:A级28枚,B级2枚,C级1枚,置钉准确率为96.77%,明显优于对照组(A级18枚,B级7枚,C级6枚,置钉准确率80.65%,P<0.05);观察组并发症的总发生率为3.23%,同样明显低于对照组22.58%,两组相比较,差异有统计学意义。
结论:机器人辅助椎弓根螺钉置钉具有较高的准确性,同时减少了置钉所带来的并发症,提高了临床治疗效果。
关键词:机器人辅助;椎弓根螺钉;Gertzbein-Robbins标准[Abstract] Objective:Analysis of the accuracy of robot-assisted pedicle screw fixation.Methods:Department of Spinal Surgery,Huaihua Chinese Medicine Hospital from December 2016 to March 2017,the clinical data of 11 patients with internal fixation operation were collected as the subjects,6 cases of robotic auxiliary nail,a total of 32 pedicle screw,set for the observation group;5 cases of doctors on hand nail,a total of 30 pedicle screw,set as the control group.The clinical data were analyzed retrospectively.The accuracy of the robot was evaluated by Gertzbein-Robbins standard,and the postoperative complications were analyzed statistically.Results:By the robot successfully assisted the placement of pedicle screw 31(observation group which has a screw in the operation due to the movement of the patient tracer to be nailed,into the control group).According to the Gertzbein-Robbins standard,the final results of the observation group:A grade 28,B grade 2,C grade 1,set nail accuracy rate of 96.77%,significantly better than the control group (A grade 18,B grade 7,C grade 6,pinning accuracy rate of 80.65%,P <0.05).The overall incidence of complications in the observation group was 3.23%,which was significantly lower than that in the control group(22.58%).There was a significant difference between the two groups.Conclusion:Robot-assisted pedicle screw fixation has a high accuracy,while reducing the complications caused by nail,improving the clinical treatment.[Key Words]:Robot support;Pedicle screw;Gertzbein-Robbins standard椎弓根螺钉固定技术是于1963年由国外Roy-Camille所提出并报道的,其目前被广泛应用于脊柱骨折、脊柱退行性病变、脊柱结核等疾病的临床治疗中,并发挥出了较好的临床治疗效果。
导航辅助置入下颈椎椎弓根螺钉的准确性解析
导航辅助置入下颈椎椎弓根螺钉的准确性第一部分:导航辅助置入下颈椎椎弓根螺钉的准确性探讨目的:颈椎椎弓根内固定技术因具备三柱固定的优越稳定性而有良好的应用前景,但由于颈椎椎弓根解剖结构变异大、毗邻关系复杂,潜在损伤周围神经血管的风险很大。
因此提高置钉的准确性和降低失误率成为颈椎椎弓根内固定技术能否深入开展的关键所在。
计算机导航技术,也称计算机辅助手术(computer-assistedsurgery CAS)可以将手术中的解剖结构与手术器械对应在同一个空间体系内,从而建立虚拟手术环境并三维显示在屏幕上,可直观引导术者操作,理论上可以提高手术准确性。
本课题通过临床实践来探讨导航辅助置入下颈椎椎弓根螺钉的准确性。
方法:25例下颈椎疾患手术病人(颈椎骨折脱位12例,脊髓型颈椎病并颈椎不稳定或后凸畸形11例,神经根型颈椎病1例,后纵韧带骨化症1例),在全麻下取俯卧位。
Gardner-Wells骨牵引或Myfield头颈手术架牵引固定,维持颈椎中立位。
颈后正中入路,骨膜下剥离双侧肌肉,充分显露手术节段后方结构至双侧小关节外侧缘。
在维持颈椎序列良好的前提下,安放并固定参考架于棘突,西门子公司CT-SIREMOBIL Iso-C 3D扫描一次完成下颈椎椎体三维图像,并将数据传到导航工作站(Stryker公司红外线主动诱导导航系统)。
应用面注册法则完成椎骨的注册。
预计精确度小于1.0mm便可接受,如果精确度大于1.0mm就要重新注册直到精确度小于1.0mm。
椎体注册完成后,进一步验证确保计算机辅助图像导航系统的虚拟图像与手术视野相对应。
如果验证过程准确,可以应用导航器械,否则重新全部注册过程。
共置入144枚颈椎(C3-7)椎弓根螺钉。
按照螺钉是否穿透椎弓根和穿透程度,将其分为三类。
(1)一类:螺钉位置满意,未穿出椎弓根皮质,或仅轻微穿透(<1mm)。
(2)二类:螺钉穿透椎弓根皮质>1mm,但不需要翻修,患者无周围组织症状,内固定稳定性良好。
无框架立体定向机器人引导颈椎弓根螺钉植人的实验研究

・
2・
中堡啮硅噻病皇康复杂志( 鬼子版)o 2n年 l 2月第 l 卷第 2期 c i j ri Ds eai(lc0i E o h Ba iR hb Eet n i n n l r c n
s r h c u a e p st n o ln a in o ce .Re u t T n yf e s r ww r mpa t d u d rt e u e te a c r t o i o fi a tt f rws i mp o s sl s we t — v ce e e i ln e n e i h a ssa c f C s i n e o RAS 2, s r w a d p e e in d o t e e on i e t a d c u a y r t w s 0 % . t - c e s n rd sg e ru e w r c i cd n . n a c r c a e a 1 0
机器人辅助经皮置钉治疗胸腰椎骨折的临床疗效
·经验交流·机器人辅助经皮置钉治疗胸腰椎骨折的临床疗效张治水,王玉景,崔鹏(北京市海淀医院骨科,北京 100000) 摘要:目的 探讨机器人辅助经皮置钉治疗胸腰椎骨折的运用价值。
方法 本研究对象为该院2020年7月~2022年7月收治的76例胸腰椎骨折患者,采用随机数字表法分为两组:对照组采用传统“C”臂透视经皮置钉,观察组采用机器人辅助经皮置钉。
比较两组患者透视次数、手术时间及置钉时间,比较Gertzbein Robbins螺钉位置分级,比较术前、术后1周、末次随访时骨折矫正效果以及疼痛改善情况。
结果 观察组透视次数、手术时间及置钉时间均显著优于对照组(P<0 05)。
观察组Gertzbein Robbins螺钉位置分级准确率显著高于对照组(P<0 05)。
相比于术前,两组患者术后1周、末次随访时骨折椎前缘高度比显著升高(P<0 05),Cobb角、VAS评分显著下降(P<0 05);但两组间各时间点比较,差异无统计学意义(P>0 05)。
结论 相较于传统“C”臂透视辅助经皮置钉,机器人辅助经皮置钉治疗胸腰椎骨折能缩短置钉时间和手术时间,减少透视次数,并有效提高螺钉置入的准确性。
关键词:骨科机器人;经皮置钉;胸腰椎骨折;置钉准确性 中图分类号:R683 2 文献标识码:B 文章编号:1005-7234(2024)02-0358-04 DOI:10.3969/j.issn.1005 7234.2024.02.034收稿日期:2023-02-05;修订日期:2023-04-25作者简介:张治水(1976-),男,山东籍,主治医师,硕士研究生 脊柱骨折常发生于胸腰段,主要由交通事故、跌落伤等高能量创伤引起,骨折后以腰背部疼痛、活动限制为主要表现,绝大部分患者需要通过手术治疗以恢复椎体高度,改善后凸畸形,降低局部疼痛症状[1]。
传统后路短节段椎弓根螺钉内固定治疗胸腰椎骨折虽然临床经验丰富,疗效确切,但创伤较大,并发症较多,越来越多的学者倾向性于对无神经、脊髓损伤的单纯性胸腰椎骨折采取创伤更小的经皮置钉治疗[2]。
数字骨科学:椎弓根螺钉置入的辅助和监测技术
为 了提 高螺钉 置 入 的成功 率 国 内外 学者设 计 了一
这种方法的优点在于它是一个可视系统 , 使术 中椎弓
系列辅助螺钉 置入 的仪 器 , 如有人设计 一种 双侧对称可
调 节 的椎 弓根 螺钉 钻 空导 向器控 制 螺钉 的水平 面 角乖 矢状 面角以及进钉 间距 , 明显提 高 了置入成功率 Ie My s l
; l ?
J r alofCJ caJReh组latve s ue 床 eerngRes 誉 3 3,20 Vo114,No.0 中 abii工 研s与 gi 复 第1 r Jul 2 21—7 2 出 国 纵 i Ti 临 康 i 4 ch 0 010 0. 3 版 程 究 En n — 3 on i u ni t ea y 0
2 计 算 机 辅 助 脊 柱 手 术 导 航 技 术 减 少 螺 钉 误 置 的 发 生
童
用来治疗脊柱骨折 、肿瘤 、畸形 、各种退行性 变等,这
些 系统 都是 利用 经椎 弓根 螺钉 来维持 节段 的稳 定直 至
牢 固的关节融合 的 出现 。1 9 年 和1 9 年 ,北 美脊柱 93 96
疗 组 5 例 患 者 共 2 4 螺 0 9枚
系统 。在 中国,继 唐天驷教授 引进 并改 良A O的经椎 弓 根 内 固定系统后 ,也相继 开展 了这一方 面的工作 。但 J
是 目前螺钉 的置入仍存在较 高的误 置率, 置也 已经成 误
钉 ,准确置入率为9 %,无 5
一
例神经损伤并发症;而对
根植入更加方便 、 安全。 但需要术前完善 的c 扫描图像重 T
建 ,并需要完备的监测设备 ,故 目前尚未推广应用 。 22 基于c . 臂机的导断 诳沭 无需术前Cr 描,手术 时将 . 扫
机器人辅助下椎弓根螺钉固定治疗胸腰椎骨折
机器人辅助下椎弓根螺钉固定治疗胸腰椎骨折徐鹏;葛鹏;章仁杰;李伟;张银顺;董福龙;钱军;申才良【摘要】目的探讨手术机器人(天玑骨科手术机器人系统)辅助椎弓根螺钉置钉与传统透视引导徒手置钉两种手术方式的临床效果.方法于2018-01-06期间纳入43例因胸腰椎骨折接受椎弓根螺钉内固定术的患者,随机分为机器人辅助组(24例)和传统透视引导组(19例).记录两组患者的手术置钉情况及术后并发症情况,并进行组间对比.结果机器人辅助组与传统透视引导组的平均透视次数分别为(8.6±2.5)次、(14.2±3.8)次,差异有统计学意义(P=0.028).机器人辅助组的手术时间略长,术中出血量略多,但两组差异无统计学意义(P>0.05).机器人辅助组的置钉准确率为96.2%;传统透视引导组为73.6%,组间差异有统计学意义(P<0.01).两组术后3d及末次随访时的VAS评分、ODI指数均有显著改善,但组间差异无统计学意义(P>0.05).结论骨科手术机器人系统不延长手术时间和增加术中出血量,并能显著提高椎弓根螺钉植入的精确度.【期刊名称】《颈腰痛杂志》【年(卷),期】2018(039)006【总页数】4页(P687-690)【关键词】脊柱骨折;机器人;椎弓根钉【作者】徐鹏;葛鹏;章仁杰;李伟;张银顺;董福龙;钱军;申才良【作者单位】安徽医科大学第一附属医院脊柱外科,安徽合肥 230032;安徽医科大学第一附属医院脊柱外科,安徽合肥 230032;安徽医科大学第一附属医院脊柱外科,安徽合肥 230032;安徽医科大学第一附属医院脊柱外科,安徽合肥 230032;安徽医科大学第一附属医院脊柱外科,安徽合肥 230032;安徽医科大学第一附属医院脊柱外科,安徽合肥 230032;安徽医科大学第一附属医院脊柱外科,安徽合肥 230032;安徽医科大学第一附属医院脊柱外科,安徽合肥 230032【正文语种】中文【中图分类】R687.3椎弓根螺钉固定是脊柱外科手术中最常用的手术方法,对脊柱生物力学的恢复起着重要的作用,然而,亚洲人群椎弓根的平均宽度仅为约8 mm[1]。
机器人辅助导航下骶髂螺钉置入的准确性
机器人辅助导航下骶髂螺钉置入的准确性张文辉;王春丽;范立真;杨玉平;张金龙;张辉;刘杰;台会平【期刊名称】《中国组织工程研究》【年(卷),期】2024(28)24【摘要】背景:骨科机器人已广泛应用于临床,已有相关报道证明其具有创伤小、手术时间短等众多优点,但其置钉准确性暂时尚无明确报道。
目的:评估机器人辅助下骶髂螺钉置入的准确性。
方法:回顾性收集甘肃省人民医院创伤外科2020年1月至2023年4月收治的骶髂关节骨折脱位、骶骨骨折患者的病历资料,共计131例,其中S_(1)螺钉131枚,S_(2)螺钉46枚,合计螺钉177枚。
按照是否行机器人辅助分为2组,观察组63例行机器人辅助导航下置入骶髂螺钉,男36例、女27例,年龄19-72岁,平均(45.3±17.6)岁,其中单纯S_(1)螺钉固定39例、S_(1)S_(2)螺钉均固定24例,合计骶髂螺钉数目87枚;对照组68例行C臂透视下徒手置入骶髂螺钉,男41例、女27例,年龄23-67岁,平均(42.6±21.3)岁,其中单纯S_(1)螺钉固定46例、S_(1)S_(2)螺钉均固定22例,合计骶髂螺钉数目90枚。
术后CT扫描,依据SMITH 等方法评估S_(1)螺钉数、S_(2)螺钉数、总螺钉数等级并计算置钉准确率。
结果与结论:①观察组S_(1)螺钉准确置钉62枚(62/63),准确率为98%;S_(2)螺钉准确置钉24枚(24/24),准确率100%;总螺钉数准确置钉86枚(86/87),准确率99%;②对照组S_(1)螺钉准确置钉58枚(58/68),准确率85%,S_(2)螺钉准确置钉19枚(19/22),准确率86%;总螺钉数准确置钉77枚(77/90),准确率86%;③两组患者S_(1)螺钉准确率、S_(2)螺钉准确率、总螺钉准确率比较差异均有显著性意义(P<0.05)。
提示机器人辅助导航下置入骶髂螺钉比C臂透视下徒手置钉具有更高的准确性,但仍有着较低的置钉失误率。
机器人辅助后路复位内固定置钉精准度及治疗胸腰椎骨折的临床效果
机器人辅助后路复位内固定置钉精准度及治疗胸腰椎骨折的临床效果【摘要】目的观察胸腰椎骨折采用机器人辅助后路复位内固定治疗置钉精准度及临床疗效。
方法选取我院收治胸腰椎骨折患者36例为研究对象,时间2020年8月-2021年8月;按照数字表法分为参照组18例(行常规切开复位内固定治疗)和研究组(行机器人辅助后路复位内固定治疗),对两组患者置钉准确率及疼痛情况进行对比与分析。
结果研究组患者置钉准确率明显高于参照组,疼痛评分明显低于参照组(P<0.05)。
结论胸腰椎骨折治疗中机器人辅助后路复位内固定治疗效果显著,可在保证置钉准确率的同时降低患者术后疼痛程度,促进患者尽快恢复。
【关键词】胸腰椎骨折;机器人;后路复位内固定[Abstract] Objective To observe the accuracy and clinical effectof robot assisted posterior reduction and internal fixation in the treatment of thoracolumbar fractures. Methods 36 patients with thoracolumbar fractures in our hospital were selected as the research object from August 2020 to August 2021; According to the digital table method, 18 cases were pided into the reference group (routine open reduction and internal fixation) and the study group (robot assisted posterior reduction and internal fixation). The accuracy of nail placement in the two groups was improvedAnd pain were compared and analyzed. Results the accuracy of nail placement in the study group was significantly higher than that in the reference group, and the pain score was significantly lower than thatin the reference group (P < 0.05). Conclusion robot assisted posteriorreduction and internal fixation is effective in the treatment of thoracolumbar fractures. It can not only ensure the accuracy of nail placement, but also reduce the degree of postoperative pain andpromote the recovery of patients as soon as possible.【 key words 】 thoracolumbar fracture; robot; Posterior reduction and internal fixation胸腰椎骨折,临床常见脊柱损伤类型之一;主要指个体胸腰椎骨质因为各种外力因素(如车祸、高处坠落、滑倒/跌倒)导致发生连续性破坏,使得个体出现腹痛、呼吸困难、麻木以及意识丧失、休克等症状【1】。
透视引导与机器人辅助椎弓根置钉效果的荟萃分析
西省长治市 046000;3山西省汾阳医院,山西省吕梁市 033000;4山西医科大学第二医院骨与软组织损伤修复重点实验室,山西省太
原市 030001)
DOI:10.3969/j.issn.2095-4344.2423
ORCID: 0000-0001-9375-8838(高阳阳)
文章快速阅读:
文章目的— (1)旨在比较透视引导与机器人辅助椎弓根置钉的疗效; (2)通过搜集文献,并运用 RevMan 软件,从统计学的角度比较二者之间的疗效,结果直观易懂并
University, Taiyuan 030001, Shanxi Province, China)
Abstract BACKGROUND: Traditional fluoroscopy-guided pedicle screw fixation is not highly accurate and can lead to serious surgical complications. To reduce surgical complications and improve the success rate of surgery, robotic assistive technology emerges as the times require. OBJECTIVE: To compare the difference of robot-assisted and fluoroscopy-guided pedicle screw placement using meta-analysis. METHODS: The study included clinical controlled trials on robot-assisted and fluoroscopy-guided pedicle screw placement published in and outside China from December 2008 to December 2018. The retrieval was performed in the online databases include Embase, PubMed, Central, CNKI, CQVIP, Wanfang, and CBM. Keywords used for search were robot assisted, fluoroscopy guided, conventional, freehand, pedicle screw in English and Chinese. After the data were extracted, statistical software Review Manager 5.3 was used for data-analysis. RESULTS AND CONCLUSION: (1) Based on the above search strategy, 1 615 studies were retrieved, and 13 were included. (2) Statistical analysis found that placement accuracy in the robot-assisted group was better than that of the fluoroscopy group [95%CI(1.55, 4.06), P=0.000 2]. Radiation intensity in the fluoroscopy group was lower than that in the robot-assisted group [95%CI(0.42, 0.82), P < 0.001], and the difference was statistically significant. (3) However, the incidence of complications [95%CI(0.23, 4.65), P=0.96] and revised surgery [95%CI(0.03, 3.17), P=0.33] were not statistically significant between the robot-assisted group and the fluoroscopy group. Intraoperative fluoroscopy time was similar between the two groups [95%CI(-38.55, 78.26), P=0.51]. Postoperative back pain [95%CI(-0.58, 0.38), P=0.68], leg pain score [95%CI(-0.20, 0.19), P=0.94] and operation time [95%CI(-6.33, 53.02), P=0.12] were also similar between the two groups, and the differences were not statistically significant. (4) Compared with fluoroscopy, robot-assisted technique has higher pedicle screw placement accuracy, especially under percutaneous conditions. Inevitably, the intraoperative radiation intensity is also more than conventional fluoroscopy. Key words: robot-assisted; fluoroscopy-guided; pedicle screw; screw placement; radiation; renovation; meta-analysis; National Natural Science Foundation of China Funding: the National Natural Science Foundation of China (Youth Foundation), No. 81601949 (to LPC); the Scientific Research Subsidy Project for Returned Overseas Students in Shanxi Province, No. 2016-118 (to LPC)
gertzbein-robbins标准
gertzbein-robbins标准
Gertzbein-Robbins标准是一种用于评估骨科手术中椎弓根螺钉置入准确性的分类标准。
该标准将椎弓根螺钉分为四类:A 类、B 类、C 类和 D 类,其中 A 类螺钉的准确率要求最高。
在使用 Gertzbein-Robbins 标准时,研究人员会记录两组患者的单枚螺钉置入时间,并比较两组之间的置钉准确率。
研究方案的实施需要符合《赫尔辛基宣言》和甘肃省人民医院对研究的相关伦理要求。
根据该标准,骨科机器人辅助脊柱畸形矫形术中椎弓根螺钉置入能显著提高 A 类螺钉的置入准确率,且具有准确度高、有效、可行等优点。
如果你对 Gertzbein-Robbins 标准的更多内容感兴趣,可以查阅相关的医学文献,以获取更详细的信息。
微创椎弓根螺钉置入中脊柱手术机器人的应用
微创椎弓根螺钉置入中脊柱手术机器人的应用摘要:目的:研究微创椎弓根螺钉置入中脊柱手术机器人的应用效果。
方法:选取58例患者,对照组29例:采用传统手术徒手置入椎弓根螺钉。
观察组29例:运用“TINAVI”机器人导航系统,对患者进行椎弓根螺钉置入。
结果:观察组并发症的总发生率为10.34%明显低于对照组41.38%,差异有统计学意义(P<0.05)。
观察组患者的手术中平均单枚置钉时间、透视次数的指标明显优于对照组,差异有统计学意义(P<0.05)。
结论:机器人导航下置钉可以有效的降低手术创伤、提高手术的准确性和安全性,缩短手术时间及减少透视次数,有效的促进了微创脊柱外科的发展应用。
关键词:手术机器人;脊柱微创手术;椎弓根螺钉置入[Abstract] Objective:To study the applied effects of minimally invasive spinal pedicle screw placement in surgical robot.Methods:58 cases of patients,29 cases in the control group:freehand pedicle screws of traditional of patients.The observation group of 29 cases:the use of robot SPINEBOT system for pedicle screw placement of patients.Results:the total incidence of complications in the observation group rate of 10.34% was significantly lower than the control group 41.38%,the difference was statistically significant(P<0.05).To observe the average drilling time,patients with fluoroscopy times,the conventional group was significantly better than the fluoroscopy time,the difference was statistically significant(P<0.05).Conclusion:robotic surgery can effectively reduce the surgical trauma,improve the accuracy and safety of surgery,and effectively promote the development and application of minimally invasive spine surgery.脊柱外科手术中常见的手术方式就是椎弓根螺钉置入,因为此方法的有效性和安全性较高,因此在临床中应用较为广泛,近年来,随着科技的微创化、数字化和精准化的发展,微创脊柱手术机器人的相关研发受到了脊柱临床研究者的高度重视,主要研究目的就是可以用机器人在微创手脊柱手术中进行辅助操作[1],有利于避免X线对医师造成的透视损伤,所以在微创脊柱手术中运用机器人进行操作具有广阔的应用前景。
新型手术机器人系统自主置入胸椎椎弓根螺钉的准确性研究
新型手术机器人系统自主置入胸椎椎弓根螺钉的准确性研究李宗泽;陈建庭;朱青安;朱永健;崔玉辉;侯崛东;孙东辉;陈嘉瑞【期刊名称】《生物骨科材料与临床研究》【年(卷),期】2022(19)2【摘要】目的评估新型手术机器人机器人系统用于置入胸椎椎弓根螺钉的准确性。
方法选取3具成人脊柱标本行CT扫描并三维重建。
在术者监视下,机器人遵循术前规划,于各胸椎椎弓根经皮自主置入克氏针,完成开路扩孔、攻丝和经皮置钉。
置钉后再行薄层CT扫描,测量螺钉破壁情况评估置钉准确性,螺钉位置准确性的评价基于Gertzbein-Robbins分级标准。
比较上胸椎(T_(1)-T_(4))、中胸椎(T_(5)-T_(8))、下胸椎(T_(9)-T_(12))螺钉置入准确性的差异。
结果共置入胸椎椎弓根螺钉72枚,螺钉位置临床可接受率(A级或B级)为84.7%。
胸椎不同分段间螺钉位置临床可接受率的差异无统计学意义(P>0.05),但下胸椎置钉优秀率(A级)更高(P<0.05)。
结论携带自主动力装置的新型手术机器人系统可准确置入胸椎椎弓根螺钉,置钉准确率与胸椎分段无关。
【总页数】6页(P5-10)【作者】李宗泽;陈建庭;朱青安;朱永健;崔玉辉;侯崛东;孙东辉;陈嘉瑞【作者单位】南方医科大学南方医院骨科-脊柱骨科;南方医科大学南方医院影像诊断科;深圳市鑫君特智能医疗器械有限公司【正文语种】中文【中图分类】R318【相关文献】1.漏斗技术置入胸椎椎弓根螺钉准确性研究2.胸椎椎弓根螺钉置入与经胸椎"椎弓根-肋横突结合区"途径置入的生物力学研究进展3.Ball tip技术置入中上胸椎椎弓根螺钉的准确性评价4.徒手克氏针加叩击法制备胸椎椎弓根钉道置入螺钉的准确性评估5.胸椎椎弓根螺钉置入技术治疗胸椎骨折患者的准确性和安全性因版权原因,仅展示原文概要,查看原文内容请购买。
机器人辅助椎弓根螺钉内固定治疗寰枢椎脱位
机器人辅助椎弓根螺钉内固定治疗寰枢椎脱位陈文创;李勇;鲁尧;张梅刃;陈海云;余照宇【期刊名称】《中国组织工程研究》【年(卷),期】2024(28)36【摘要】背景:寰枢椎脱位因手术难度极高、风险极大,曾被国际骨科界视为“手术禁区”。
然而,随着骨科智能数字化的迅速发展,机器人辅助导航置钉技术被广泛应用于临床,显著降低了手术难度和手术风险,提高了手术安全性,但是将该技术应用于治疗寰枢椎脱位的报道较少。
目的:探究机器人辅助椎弓根螺钉内固定治疗寰枢椎脱位的应用价值。
方法:回顾性分析2021年10月至2022年7月于广东省中医院珠海医院在机器人辅助导航下行C1-C2椎弓根螺钉内固定治疗的5例寰枢椎脱位患者的病历资料。
记录手术时间、颈部切口长度、出血量、术后引流量、住院时间,关注有无脑脊液漏、椎动脉损伤、神经损伤、术区感染等并发症发生,收集术前及末次随访颈部疼痛目测类比评分、美国脊椎损伤学会脊髓损伤分级、日本骨科协会颈椎评分及影像学指标,并评估置钉准确率。
结果与结论:①5例患者均顺利完成手术,均未出现血管、神经损伤等并发症,且均获得随访,随访时间为12-20个月;②5例患者共置入20枚颈椎椎弓根螺钉,其中A类螺钉9枚,B类螺钉10枚,C类螺钉1枚,置钉准确率为95%;③末次随访时,目测类比评分为(0.80±0.71)分,较术前(4.00±2.83)分明显下降;日本骨科协会评分为(14.80±0.84)分,较术前(8.00±0.71)分明显升高;而寰齿前间隙由术前(7.86±3.25)mm减小至(2.82±0.93)mm,寰枢椎管储备间隙由术前(6.74±1.99)mm增大至(12.10±3.51)mm,延髓颈髓角由术前(133.32±13.55)˚增大至(153.44±9.53)°,斜坡椎管角由术前(128.02±9.92)˚增大至(143.25±12.99)˚;以上末次随访指标结果均较术前改善,差异有显著性意义(P均<0.05);④术后影像学随访提示所有患者植骨区均获得骨性融合,无内固定松动、断裂或拔出等情况出现;⑤提示该方法可以避免依赖医生的经验和手感,保证上颈椎螺钉置钉的准确性,降低手术风险,并在中期随访中获得了满意的疗效。
个人智能设备测量腰椎椎弓根螺钉倾斜角度的准确性研究
个人智能设备测量腰椎椎弓根螺钉倾斜角度的准确性研究
王爽;王冠;王玄;辛广辉
【期刊名称】《骨科》
【年(卷),期】2014(5)3
【摘要】上世纪80年代以来,椎弓根螺钉以其优越的生物力学表现逐渐得到全世
界脊柱外科医师的认可,被广泛应用于外伤、畸形、肿瘤、退变等各种脊柱疾病的
治疗,取得了理想的效果,已成为脊柱外科的标准术式。
然而,因椎弓根螺钉置钉位置不佳而影响其临床效果,甚至损伤神经根、血管、硬膜囊或脊髓的报道也并不罕见。
【总页数】2页(P181-182)
【作者】王爽;王冠;王玄;辛广辉
【作者单位】110003沈阳,中国人民解放军第二○二医院骨科;110003沈阳,中国人民解放军第二○二医院骨科;110003沈阳,中国人民解放军第二○二医院骨
科;110003沈阳,中国人民解放军第二○二医院骨科
【正文语种】中文
【相关文献】
1.三维重建数字骨科技术辅助胸腰椎椎弓根螺钉徒手置钉准确性的应用研究 [J],
张玉松;连欣;张健荣
2.东北地区成人腰椎棘突倾斜角度数字解剖学:为椎弓根螺钉置入的参考标准 [J], 李朋;李宏伟;王爽;王海洲
3.东北地区成人腰椎棘突倾斜角度数字解剖学:为椎弓根螺钉置入的参考标准 [J], 李朋;李宏伟;王爽;王海洲;
4.三维重建数字骨科技术辅助胸腰椎椎弓根螺钉徒手置钉准确性的应用研究 [J], 邹方亮;李克军;杨治乐
5.三维重建数字骨科技术辅助胸腰椎椎弓根螺钉徒手置钉准确性的应用研究 [J], 邹方亮;李克军;杨治乐;
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人辅助椎弓根螺钉置钉的准确性观察摘要:目的:分析机器人辅助椎弓根螺钉置钉的准确性。
方法:收集怀化市中医医院脊柱外科2016年12月~2017年3月行钉棒系统内固定手术的11例患者临床资料作为研究对象,其中6例机器人辅助置钉,共32枚椎弓根螺钉,设为观察组;5例医师徒手置钉,共30枚椎弓根螺钉,设为对照组。
分析临床资料进行回顾性研究,通过Gertzbein-Robbins标准评价机器人置钉的准确性,并统计分析两组患者术后并发症情况。
结果:由机器人成功辅助置入椎弓根螺钉31枚(观察组其中有1枚螺钉在手术中由于患者示踪器移动而改为徒手置钉,归为对照组),根据Gertzbein-Robbins标准,观察组最终结果:A级28枚,B级2枚,C级1枚,置钉准确率为96.77%,明显优于对照组(A级18枚,B级7枚,C级6枚,置钉准确率80.65%,P<0.05);观察组并发症的总发生率为3.23%,同样明显低于对照组22.58%,两组相比较,差异有统计学意义。
结论:机器人辅助椎弓根螺钉置钉具有较高的准确性,同时减少了置钉所带来的并发症,提高了临床治疗效果。
关键词:机器人辅助;椎弓根螺钉;Gertzbein-Robbins标准[Abstract] Objective:Analysis of the accuracy of robot-assisted pedicle screw fixation.Methods:Department of Spinal Surgery,Huaihua Chinese Medicine Hospital from December 2016 to March 2017,the clinical data of 11 patients with internal fixation operation were collected as the subjects,6 cases of robotic auxiliary nail,a total of 32 pedicle screw,set for the observation group;5 cases of doctors on hand nail,a total of 30 pedicle screw,set as the control group.The clinical data were analyzed retrospectively.The accuracy of the robot was evaluated by Gertzbein-Robbins standard,and the postoperative complications were analyzedstatistically.Results:By the robot successfully assisted the placement of pedicle screw 31(observation group which has a screw in the operation due to the movement ofthe patient tracer to be nailed,into the control group).According to the Gertzbein-Robbins standard,the final results of the observation group:A grade 28,B grade 2,C grade 1,set nail accuracy rate of 96.77%,significantly better than the control group(A grade 18,B grade 7,C grade 6,pinning accuracy rate of 80.65%,P<0.05).The overall incidence of complications in the observation group was 3.23%,which was significantly lower than that in the control group(22.58%).There was a significant difference between the two groups.Conclusion:Robot-assisted pedicle screw fixation has a high accuracy,while reducing the complications caused by nail,improving the clinical treatment.[Key Words]:Robot support;Pedicle screw;Gertzbein-Robbins standard椎弓根螺钉固定技术是于1963年由国外Roy-Camille所提出并报道的,其目前被广泛应用于脊柱骨折、脊柱退行性病变、脊柱结核等疾病的临床治疗中,并发挥出了较好的临床治疗效果。
临床研究发现,椎弓根附近拥有较多的神经组织,且毗邻着血管以及脊髓等,因此使椎弓根螺钉的置入存在一定的风险[1]。
随着近年来科学技术水平的不断提高,研究学者发现在机器人的辅助作用下,将有效提高椎弓根螺钉的置钉准确率,为临床治疗工作的开展做出了积极的贡献[2]。
基于此,本研究选取了2016年12月~2017年3月行机器人辅助椎弓根螺钉置钉的11例患者作为研究对象,针对其临床资料进行了回顾性分析,现报道如下。
1 资料与方法1.1一般资料选取怀化市中医医院脊柱外科2016年12月~2017年3月行机器人辅助椎弓根螺钉置钉的6例患者(观察组,共31枚椎弓根螺钉)及开放手术医师徒手置钉患者5例(对照组,共31枚椎弓根螺钉,含观察组机器人置钉失败改为徒手置钉的1枚)作为研究对象。
其中,男性患者7例,女性患者4例,其年龄范围在42岁~67岁,平均年龄(53.24±10.85)岁。
所有患者中,包括双节段腰椎间盘突出症1例(6枚椎弓根螺钉)、单节段椎间盘突出症4例(4枚/例,共16枚)、双节段椎体骨折2例(6枚/例,共12枚)、单节段椎体骨折1例(4枚)、腰椎结核3例(8枚/例,共24枚)。
1.2方法对照组:传统开放手术由同一高年资主任医师徒手置入椎弓根螺钉,共5例,椎弓根螺钉31枚。
观察组:运用机器人对患者进行椎弓根螺钉置入,共6例,椎弓根螺钉31枚。
运用“天玑”(TINAVI Tirobot)机器人导航系统,对患者进行椎弓根螺钉置入。
此系统是由北京天智航医疗科技股份有限公司所研发的6个自由度机械臂,其中有一个平面C型臂和外科操作系统所成立的自动化双平面透视对机器人进行引导的系统。
1.3观察指标所有患者术后常规行X线及CT三维重建复查,并术后7d内观察患者是否出现了由于置钉所引发的神经根、脊髓以及血管损伤等并发症。
同时,针对患者的置钉情况进行分级,采用Gertzbein-Robbins分级标准,具体分级方法如下:(1)A级:椎弓根螺钉位于椎弓根内;(2)B级:椎弓根螺钉穿破椎弓根皮质≤2mm;(3)C级:椎弓根螺钉穿破椎弓根皮质>2mm且≤4mm;(4)D级:椎弓根螺钉穿破椎弓根皮质>4mm且≤6mm;(5)E级:椎弓根螺钉穿破椎弓根皮质>6mm。
其中,A级与B级被视为准确置钉。
1.4统计学方法采用SPSS 22.0 统计软件进行数据分析,计数资料以频数表示,大样本构成比比较采用卡方χ2检验,四格表资料采用Fshier卡方(Fshierχ2)检验,小样本等级资料采用非参数秩和检验进行比较。
P<0.05为差异有统计学意义。
2 结果根据术后CT重建资料机器人辅助完成置钉的6例患者中,置钉数量为31枚,观察组其中有1枚螺钉在手术中由于患者示踪器移动而改为徒手置钉;徒手置钉的5例患者中,置钉数量为30枚,加上观察组机器人置钉失败1枚,共计31枚。
所有患者置钉结束后,均未出现由于置钉所引发的神经根、脊髓以及血管损伤等并发症。
根据Gertzbein-Robbins标准对患者的置钉情况进行评价,结果发现对照组共包括A级18枚,B级7枚,C级6枚,置钉准确率为80.65%;观察组共包括A级28枚,B级2枚,C级1枚,置钉准确率为96.77%。
观察组并发症的总发生率为3.23%,低于对照组22.58%。
2.1 对比两组患者的置钉的准确率观察组患者的置钉准确率相比较,观察组优于对照组,差异有统计学意义(P=0.044 <0.05)。
详见表13 讨论随着椎弓根螺钉内固定在腰椎退行性病变、不稳定的胸腰椎骨折、脊柱骨病等疾病手术中的成功应用以来,为推动脊柱外科的发展奠定了良好的基础[3]。
然而由于受到局部解剖结构变异以及退变等诸多因素的影响,从而导致椎弓根螺钉的置钉精准性受到了阻碍,这也使针对椎弓根螺钉置钉准确率提升的研究日益成为了研究学者所重点关注的问题。
部分临床经验表明,人工操作椎弓根螺钉置钉的椎弓根穿破率达到了20%,而置钉后所引发患者出现的并发症发生率也达到了10%以上[4],螺钉置入位置的不佳不仅会引发内固定系统的强度下降,甚至将会导致患者的神经根损伤,硬膜囊撕裂以及脊髓损伤等,严重威胁到了患者的生命健康。
因此,临床治疗中急需一种解决方案,可以有效减少椎弓根螺钉置钉的失误率。
随着近年来临床技术水平的不断提高,机器人日益成为了辅助临床治疗工作开展的重要力量,其不仅可以有效的帮助外科医生治疗病人,提高临床治疗的效率和质量,同时也将减少其他不利因素对患者生命所带来的危险,有效防止了目前开放手术中出现的住院时间长以及并发症发生率高等问题。
机器人辅助椎弓根螺钉固定技术是近几年所提出的新型治疗方式,部分研究表明,在机器人的辅助作用下,椎弓根螺钉的置钉准确率得到了显著的提升,而置钉后患者的并发症发生率也得到了显著的降低,为临床治疗工作的顺利开展做出了积极的贡献[5]。
相比于传统辅助置钉模式,机器人辅助置钉具有多种优点,首先是设备的布局较为简单,其不会对手术室原有的设备布局产生影响,但应当考虑设备是否存在遮挡问题;其次是操作的简单化,仅需要采集C型臂X线机所拍摄的3D图像,并根据机器人软件系统的提示进行操作,并完成实施路径的规划即可;再次是定位的准确性,在手术过程中,仅需要根据程序的要求进行操作,就可以实现对椎弓根螺钉的有效定位,同时还可以确保定位的精准(平均误差在0.5以内);最后,机器人辅助还具有纠偏功能,若在手术过程中出现了定位偏差的问题,通过软件的微调功能可以及时对机械臂的角度进行调节,进一步提高了手术的安全性[6]。