哈工大单片机1-10
哈工大单片机张毅刚课件 第1章

5.低功耗化 CMOS化 CHMOS工艺。 总之,向高性能、高速、低压、低功耗、低价格、 外围电路内装化方向发展。 1.5 单片机的应用 单片机卓越的性能,得到了广泛的应用,已深入 到各个领域。 使用温度: 民品: 0°C —+70°C 工业品: -40°C —+85°C 军品: -65°C —+125°C。
功能介于MCS-51和MCS-96之间。目前已得到了较广 泛的使用。 (6)片内闪烁存储器型
美国ATMEL公司的AT89C51单片机,受到应用设计 者的欢迎。
MCS-51系列以及80C51系列单片机有多种类型, 但 掌握好MCS-51的基本型(8031、8051、8751或80C31、 80C51、87C51)是十分重要的。 它们是具有MCS-51内核的各种型号单片机的基础, 也是各种增强型、扩展型等衍生品种的核心。
8.8051与8751的区别是:
(A)内部数据存储单元数目的不同;(B)内部数 据存储器的类型不同;(C)内部程序存储器的类型 不同;(D)内部的寄存器的数目不同。 9.在家用电器中使用单片机应属于微计算机的 (A)辅助设计应用(B)测量、控制应用(C)数值计 算应用(D)数据处理应用 10.说明单片机主要应用在哪些领域?
(2)专用型
专门针对某些产品的特定用途而制作的单片机 , 针对性强且数量巨大。 对系统结构的最简化、可靠性和成本的最佳化等 方面都作了全面的考虑 。
“专用”单片机具有十分明显的综合优势。
1.2 单片机的历史及发展概况
四个阶段:
第一阶段(1974年~1976年):单片机初级阶段。双片 的形式,且功能比较简单。 第二阶段(1976年~1978年):低性能单片机阶段。 以Intel 公司制造的MCS-48单片机为代表。
《哈工大单片机》课件

控制等。
02
总结词
通过单片机实现对家居设备的智能化控制,提高生活便利性和舒适度。
03
详细描述
单片机作为智能家居系统的核心控制器,能够实现对家居设备的远程控
制、定时控制和语音控制等功能,提高家居生活的便利性和舒适度,同
时降低能耗和节约能源。
工业控制系统
工业控制系统
介绍单片机在工业自动化领域的应用,如数据采集、设备监控、生产过程控制等。
单片机的历史与发展
总结词
单片机的历史与发展
详细描述
单片机的发展历程可以分为三个阶段。第一阶段是单片 机诞生初期,主要代表产品是Intel于1971年为日本名 为名为Mitsubishi的电气集团开发的,该阶段单片机功 能简单,指令集短,位数不一。第二阶段是在20世纪 80年代初,随着微电子技术和计算机技术的发展,单 片机的指令集功能不断增强,位数也得到了统一,形成 了8位、16位、32位等不同位数的单片机。第三阶段是 进入21世纪后,随着嵌入式系统的发展,单片机也向 专业化、智能化方向发展,出现了各种具有特殊功能的 单片机,如DSP、ARM等。
03
C语言具有较好的可读性和可维护性,适合开发大型 项目。
其他编程语言
其他编程语言包括C、Java等 高级语言,也可以用于单片机 的开发。
这些高级语言可以提供更好的 抽象和封装,使开发更加方便 快捷。
但是这些高级语言运行效率较 低,需要经过解释或编译成机 器码才能运行。
04 单片机的开发环境
Keil软件
03
04
支持多种单片机型号, 如PIC系列、AVR系列 等。
支持多种操作系统,如 Windows、Linux等。
05 单片机开发流程
哈尔滨工业大学单片机实验报告-图文(精)
哈尔滨工业大学单片机实验报告-图文(精)H a r b i n I n s t i t u t e o f T e c h n o l o g y 单片机原理与应用实验报告学生姓名:学号:班级:通信工程专业:任课教师:所在单位:电子与信息工程学院2013年5月在软件实验部分,通过实验程序的调试,使学生熟悉MCS-51的指令系统,了解程序设计过程,掌握汇编语言设计方法以及如何使用实验系统提供的调试手段来排除程序错误。
实验一清零程序一、实验目的掌握汇编语言设计和调试方法,熟悉键盘操作。
二、实验内容把2000~20FFh的内容清零。
三、程序框图四、实验过程1、LED环境⑴在“P.”状态下按“0→EV/UN”,装载实验所需的代码程序。
⑵在“P.”状态下键入0640,然后按“STEP”或“EXEC”进入实验项目的调试与运行。
在与PC联机状态下,编译、连接、下载PH51\se01.asm,用连续或单步方式运行程序。
3、运行结果检查⑴在单步运行时,每走一步可观察其运行结果。
⑵在连续运行状态下,应按“暂停图标”或实验箱上的“暂停按钮”,使系统无条件退出用户运行状态返回监控,然后再用相应的命令键观察与检查2000~20FFH中执行程序前后的内容变化。
五、实验结果及分析实验前截图:实验后截图:实验源程序:ORG 0640HSE01: MOV R0,#00HMOV DPTR,#2000H ;(2000H送DPTR LOO1: MOVX @DPTR,A ;0送(DPTR INC DPTR ;DPTR+1INC R0 ;字节数加1CJNE R0,#00H,LOO1 ;不到FF个字节再清SJMP $END实验问题:2000H~20FFh中的内容是什么?解答:实验运行之前,2000H~20FFh中的内容是随机分配的;在执行完清零程序之后,2000H~20FFh中的内容都变为0.实验二拆字程序一、实验目的掌握汇编语言设计和调试方法。
哈工程单片机课程设计

哈工程单片机课程设计一、课程目标知识目标:1. 理解单片机的原理与结构,掌握单片机的基本工作方式;2. 学会使用单片机编程语言进行程序设计,并能实现简单的控制功能;3. 了解单片机在工程领域的应用,掌握相关传感器与执行器的接口技术。
技能目标:1. 能够运用所学知识,独立设计并实现基于单片机的控制系统;2. 培养学生动手能力,学会使用相关开发工具与调试设备;3. 提高学生的问题分析能力,培养他们解决实际工程问题的能力。
情感态度价值观目标:1. 培养学生对单片机技术的兴趣,激发他们学习相关工程的热情;2. 增强学生的团队协作意识,培养他们相互学习、共同进步的精神;3. 引导学生认识到单片机技术在我国工程领域的重要地位,树立为祖国工程技术事业贡献力量的信念。
本课程针对哈尔滨工程大学单片机课程设计,结合学生年级特点,注重理论与实践相结合,培养学生具备扎实的单片机基础知识,较强的动手实践能力,以及解决实际工程问题的综合素质。
通过本课程的学习,使学生能够在工程领域发挥所学,为我国工程技术事业做出贡献。
二、教学内容1. 单片机原理与结构:介绍单片机的基本组成、工作原理及性能特点,对应教材第一章内容;- 单片机的内部结构;- 单片机的工作原理;- 单片机的性能指标。
2. 单片机编程语言:学习单片机编程语言(如C语言、汇编语言等),对应教材第二章内容;- 编程语言的基本语法;- 编程实例分析;- 程序设计与调试方法。
3. 单片机接口技术:学习单片机与传感器、执行器的接口技术,对应教材第三章内容;- 常用接口电路;- 传感器与单片机的接口设计;- 执行器与单片机的接口设计。
4. 单片机控制系统设计:结合实际案例,学习单片机控制系统设计方法,对应教材第四章内容;- 控制系统设计步骤;- 系统分析与设计;- 系统调试与优化。
5. 实践环节:组织学生进行单片机控制系统设计与实现,结合教材内容进行实际操作;- 设计简单的单片机控制系统;- 动手编程与调试;- 分析并解决实际问题。
单片机功率接口技术(哈尔滨工业大学)

TB2 Vcc
内部上拉 电阻(L1)
2. 输出为低
P1.X
1. 向引脚写 0
内部 CPU 总线
写锁存器
D
Q
0
1
M1
P1.X
Clk Q
输出 0
TB1
读引脚
2.4.1.4 输入引脚读 “高”
读锁存器
TB2 1. 向引脚写 1 MOV P1,#0FFH 内部上拉电 阻(L1) Vcc 2. MOV A,P1 外部引脚为高
专用化 带有可编程逻辑
DSP
FPGA——Xilinx, Altera,
etc
1.3 单片机应用
1.3.1单机应用
在一个应用系统中, 只使用1片单片机称为单机应用, 这 是目前应用最多的一种方式。
测控系统:工业控制系统、 自适应控制系统、 数据采集 系统等,达到测量与控制的目的。 智能仪表:仪表数字化、智能化、多功能化、综合化、 柔性化。 机电一体化产品:机械产品结构简化,控制智能化。 智能接口:在计算机控制系统,特别是在较大型的工业 测 控系统中,用单片机进行接口的控制与管理,单片机 与主机的并行工作,大大提高了系统的运行速度。 智能民用产品
从功能上可分为: 5大部分
程序存储器 内部数据存储器、外部数据存储器 特殊功能寄存器 位地址空间
MCS—51单片机存储器空间结构图
(a) 程序存储器; (b) 内部数据存储器; (c) 外部数据存储器
(a)
(b)
(c)
2.4 MSC-51单片机I/O引脚
2.4.1 2.4.2 2.4.3 2.4.4 P0口 P1口 P2口 P3口
PSEN RD/ WR P2 P0 指令 PCL 输入 指令 PCL 输入 数据输入 数据输出 PCL PCH
哈尔滨工业大学单片机实验报告-图文(精)
H a r b i n I n s t i t u t e o f T e c h n o l o g y单片机原理与应用实验报告学生姓名:学号:班级:通信工程专业:任课教师:所在单位:电子与信息工程学院2013年5月软件实验在软件实验部分,通过实验程序的调试,使学生熟悉MCS-51的指令系统,了解程序设计过程,掌握汇编语言设计方法以及如何使用实验系统提供的调试手段来排除程序错误。
实验一清零程序一、实验目的掌握汇编语言设计和调试方法,熟悉键盘操作。
二、实验内容把2000~20FFh的内容清零。
三、程序框图四、实验过程1、LED环境⑴在“P.”状态下按“0→EV/UN”,装载实验所需的代码程序。
⑵在“P.”状态下键入0640,然后按“STEP”或“EXEC”进入实验项目的调试与运行。
2、PC环境在与PC联机状态下,编译、连接、下载PH51\se01.asm,用连续或单步方式运行程序。
3、运行结果检查⑴在单步运行时,每走一步可观察其运行结果。
⑵在连续运行状态下,应按“暂停图标”或实验箱上的“暂停按钮”,使系统无条件退出用户运行状态返回监控,然后再用相应的命令键观察与检查2000~20FFH中执行程序前后的内容变化。
五、实验结果及分析实验前截图:实验后截图:实验源程序:ORG 0640HSE01: MOV R0,#00HMOV DPTR,#2000H ;(2000H送DPTRLOO1: MOVX @DPTR,A ;0送(DPTRINC DPTR ;DPTR+1INC R0 ;字节数加1CJNE R0,#00H,LOO1 ;不到FF个字节再清SJMP $END实验问题:2000H~20FFh中的内容是什么?解答:实验运行之前,2000H~20FFh中的内容是随机分配的;在执行完清零程序之后,2000H~20FFh中的内容都变为0.实验二拆字程序一、实验目的掌握汇编语言设计和调试方法。
二、实验内容把2000h的内容拆开,高位送2001h低位,低位送2002h低位,2001h、2002h高位清零,一般本程序用于把数据送显示缓冲区时用。
哈工大单片机原理试验指导
《单片机原理》 实验指导书张毅刚 何谨 李华哈尔滨工业大学2007年4月目 录序-------------------------------------------------------------------------------------------------------------1实验1 单片机实验开发系统操作实验-------------------------------------2实验2 单片机数据区传送程序设计------------------------------------------4实验3 数据排序实验---------------------------------------------------------------------6实验4 查找相同数个数-----------------------------------------------------------------8实验5 P1口转弯灯实验---------------------------------------------------------------10实验6 工业顺序控制--------------------------------------------------------------------13实验7 8255控制交通灯---------------------------------------------------------------16实验8 A/D转换实验-----------------------------------------------------------------------19实验9 D/A转换实验-----------------------------------------------------------------------22实验10 电子时钟(定时器、中断综合实验)--------------------26附录1 DAIS-80958B单片机实验开发系统简介--------------------37附录2 实验开发系统的字形/字位/键值表---------------------------39序一、实验素养和一般知识1.实验前准备工作(1) 明确实验目的、熟悉实验内容、掌握实验步骤、了解所用单片机实验开发系统及仪器设备的性能。
哈尔滨理工大学自动化单片机课程设计

单片机课程设计任务书题目:基于单片机的温度数据采集系统设计一.设计要求1.被测量温度范围:0~500℃,温度分辨率为0.5℃。
2.被测温度点:4个,每2秒测量一次。
3.显示器要求:通道号1位,温度4位(精度到小数点后一位)。
显示方式为定点显示和轮流显示。
4.键盘要求:(1)定点显示设定;(2)轮流显示设定;(3)其他功能键。
二.设计内容1.单片机及电源管理模块设计。
单片机可选用AT89S51及其兼容系列,电源管理模块要实现高精密稳压输出,为单片机及A/D转换器供电。
2.传感器及放大器设计。
传感器可以选用镍铬—镍硅热电偶(分度号K),放大器要实现热电偶输出的mV级信号到A/D输入V级信号放大。
3.多路转换开关及A/D转换器设计。
多路开关可以选用CD4052,A/D可选用MC14433等。
4.显示器设计。
可以选用LED显示或LCD显示。
5.键盘电路设计。
实现定点显示按键;轮流显示按键;其他功能键。
6.系统软件设计。
系统初始化模块,键盘扫描模块,显示模块,数据采集模块,标度变换模块等。
引言:在生产和日常生活中,温度的测量及控制十分重要,实时温度检测系统在各个方面应用十分广泛。
消防电气的非破坏性温度检测,大型电力、通讯设备过热故障预知检测,各类机械组件的过热预警,医疗相关设备的温度测试等等都离不开温度数据采集控制系统。
随着科学技术的发展,电子学技术也随之迅猛发展,同时带动了大批相关产业的发展,其应用范围也越来越广泛。
近年来单片机发展也同样十分迅速,单片机已经渗透到工业、农业、国防等各个领域,单片机以其体积小,可靠性高,造价低,开发周期短的特点被广泛推广与应用。
传统的温度采集不仅耗时而且精度低,远不能满足各行业对温度数据高精度,高可靠性的要求。
温度的控制及测量对保证产品质量、提高生产效率、节约能源、生产安全、促进国民经济的发展起到重要作用。
在单片机温度测量系统中关键是测量温度,控制温度和保持温度。
温度测量是工业对象的主要被控参数之一。
哈尔滨理工大学 电技 单片机实验报告

哈尔滨理工大学实验报告课程名称:单片机学院:自动化学院专业班级:电技12-2学生姓名:学号:指导教师:钟伟锋实验一一.实验目的1、熟悉S51E单片机用户板的基本组成;2、初步掌握单片机在线编程,脱机运行流程;二.实验内容及设计流程编译程序,用单片机下载程序进行硬件测试。
三.硬件描述语言实验程序1ORG 0000HSJMP MAINORG 0030HMAIN: MOV A,#0FEHMOV B,#100DIV ABMOV R0,#21HMOV @R0,ADEC R0MOV A,#10XCH A,BDIV ABSWAP AADD A,BMOV @R0,ASJMP $四.仿真结果及分析实验二一.实验目的1、熟悉S51E单片机用户板的基本组成;2、初步掌握单片机在线编程,脱机运行流程;二.实验内容及设计流程编译程序,用单片机下载程序进行硬件测试。
三.硬件描述语言实验程序(设系统频率为12MHz)ORG 0000HLP: MOV P1, #81HLCALL DELAYMOV P1, #42HLCALL DELAYMOV P1, #24HLCALL DELAYMOV P1, #18HLCALL DELAYMOV P1, #24HLCALL DELAYMOV P1, #42HLCALL DELAYSJMP LPDELAY: MOV R2, #64HL1: MOV R3, #0C8HL2: DJNZ R3, L2DJNZ R2, L1RET四.仿真结果及分析实验三一.实验目的1、熟悉S51E单片机用户板的基本组成;2、初步掌握单片机在线编程,脱机运行流程;二.实验内容及设计流程编译程序,用单片机下载程序进行硬件测试。
三.硬件描述语言(顶层文件)a)(1)输出口控制程序ORG 0000HMOV A,#0FEHMAIN: MOV P1, ARL ALCALL DELAYAJMP MAINDELAY: MOV R7,#255DL: MOV R6,#255DJNZ R6,$DJNZ R7,DLRETEND(2)输入口控制输出口程序key bit p3.3ORG 0000H ;伪指令LJMP MAIN ;跳转到单片机的主程序ORG 0100H ;伪指令,单片机主程序的开始MAIN: MOV P1, #0FFH ;将P1口上的灯全部关掉MOV P2,#0FFHclr key ;将键盘列线拉低MOV A, P2 ;从P2口上读出按键状态ANL A, #11111100B ;选出状态位置CJNE A, #01111100B,M_01 ;比较键值,是第一个键吗LJMP M_001 ;是的M_01: CJNE A, #10111100B,M_02 ;是第二个键吗LJMP M_002 ;是第二个键M_02: CJNE A, #11011100B,M_03 ;是第三个键吗LJMP M_003 ;是第三个键M_03: CJNE A, #11101100B,M_04 ;是第四个键吗LJMP M_004 ;是第四个键M_04: CJNE A, #11110100B,M_05 ;是第五个键吗LJMP M_005 ;是第五个键M_05: CJNE A, #11111000B,M_06 ;是第六个键吗LJMP M_006 ;是第六个键M_06: LJMP MAIN ;无键,跳回去重新判断M_001: CLR P1.0 ;打开第一个灯LCALL DEL ;调延时子程序SETB P1.0 ;关闭第一个灯LJMP MAIN ;跳回去重新判断M_002: CLR P1.1 ;打开第二个灯LCALL DELSETB P1.1LJMP MAINM_003: CLR P1.2 ;打开第三个灯LCALL DELSETB P1.2LJMP MAINM_004: CLR P1.3 ;打开第四个灯LCALL DELSETB P1.3LJMP MAINM_005: CLR P1.4 ;打开第五个灯LCALL DELSETB P1.4LJMP MAINM_006: CLR P1.5 ;打开第六个灯LCALL DELSETB P1.5LJMP MAINDEL: MOV R6, #0FFH ;延时子程序DEL_1: MOV R7, #0FFHDEL_0: NOPNOPDJNZ R7, DEL_0DJNZ R6, DEL_1RETEND四.仿真结果及分析实验四一.实验目的了解80C51系列单片机具有5 个中断要求,即2 个外部中断,2 个定时器中断及1个串行断口中断。
哈工程单片机实验
复位”按键按下,程序将TR0置为0,同时将存储时间的变 量清零,从而中断停止,并实现复位。
本题目采用专用数码管显示控制芯片MAX7219。 MAX7219是美国MAXIM公司生产的串行输入/输出共 阴极显示驱动器,该芯片最多可驱动8位7段数字LED显 示器或个LED和条形图显示器。其引脚图及引脚功能参 见有关参考资料。
2. 实验原理
产生指定波形可以通过DAC来实现,不同波形产生实质上 是对输出的二进制数字量进行相应改变来实现的。本题目中, 方波信号是利用定时器中断产生的,每次中断时,将输出的 信号按位反即可;三角波信号是将输出的二进制数字信号依 次加1,达到0xff时依次减1,并实时将数字信号经D/A转换 得到;锯齿波信号是将输出的二进制数字信号依次
8
K3—设置分钟。 K4—确认完成设置。 程序执行后工作指示灯LED闪动,表示程序开始执行,LCD显
示“00:00:00”,然后开始计时。 2. 实验原理 题目难点在于键盘的指令输入,由于每个按键都具有相应的一
种或多种功能,程序中需要大量使用do{}while或while{} 循环结构,以检测是否有按键按下。按键检测函数的详解 如下(略)
本波形发生器的设计电路原理图,如下页图所示:
41
42
题目10 电容、电阻参数单片机测试系统的设计倒计数的时间。一旦按下键 则开始倒计数,当计数为0时,发出一阵音乐声。
程序执行后工作指示灯LED闪动,表示程序开始执行,按下 操作键K1~K4动作如下。
K1—可调整倒计数的时间1~60分钟。 K2—设置倒计数的时间为5分钟,显示“0500”。 K3—设置倒计数的时间为10分钟,显示“1000”。 K4—设置倒计数的时间为20分钟,显示“2000”。 复位后LCD的画面应能显示倒计时的分钟和秒数,此时按K1 键,
哈工大单片机课件

THE FIRST LESSON OF THE SCHOOL YEAR
哈工大单片机课件
目
CONTENTS
单片机基础知识单片机硬件结构单片机软件编程单片机开发流程单片机实际应用案例
录
01
单片机基础知识
总结词:单片机是一种集成电路芯片,它集成了中央处理器、存储器、输入输出接口等计算机的主要部件,具有体积小、功耗低、可靠性高等优点。根据不同的应用需求,单片机可以分为多种类型,如8位单片机、16位单片机、32位单片机等。
编写程序代码
在开发环境中调试程序代码,确保程序功能正确实现。
调试程序代码
根据需要,优化程序性能,提高系统运行效率。
优化程序性能
对制作的电路板进行调试,确保硬件电路工作正常。
硬件调试
将程序代码烧录到单片机中,进行软件调试,确保软件行优化,提高系统整体性能和稳定性。
汇编语言
C语言
Keil uVision
Keil uVision是一款流行的单片机编程软件,支持多种单片机型号和C语言开发。它具有友好的用户界面和丰富的调试功能,方便开发者进行程序编写、调试和烧写。
IAR Embedded Workbench
IAR Embedded Workbench是一款专业的单片机编程软件,支持多种单片机型号和C/C语言开发。它具有强大的编译器、调试器和项目管理功能,可以提高开发效率。
智能仪表系统可以实现的功能包括:温度、压力、流量等物理量的测量与控制、数据存储与传输等。
智能仪表系统的发展趋势是高精度、高可靠性和智能化,以满足工业生产和科学研究的不断升级需求。
01
机器人控制系统是利用单片机技术实现机器人运动和行为的智能化控制,从而提高机器人的自主性和适应性。
单片机习题答案(哈工大张毅刚主编单片机原理及应用)

“单片机原理及应用”课程习题与解答第一章1-3:单片机与普通计算机的不同之处在于其将()()和()三部分集成于一块芯片上。
答:CPU、存储器、I/O口1-8:8051与8751的区别是:A、内部数据存储但也数目的不同B、内部数据存储器的类型不同C、内部程序存储器的类型不同D、内部的寄存器的数目不同答:C第二章2-4:在MCS-51单片机中,如果采用6MHz晶振,1个机器周期为()。
答:2us。
析:机器周期为振荡周期的1/6。
2-6:内部RAM中,位地址为30H的位,该位所在字节的字节地址为()。
答:26H2-7:若A中的内容为63H,那么,P标志位的值为()。
答:0析:P为偶校验位,因为A中1的个数为偶数,所以P=0。
2-8:判断下列说法是否正确:A、8031的CPU是由RAM和EPROM所组成。
B、区分片外程序存储器和片外数据存储器的最可靠的方法是看其位于地址范围的低端还是高端。
C、在MCS-51中,为使准双向的I/O口工作在输入方式,必须保证它被事先预置为1。
D、PC可以看成使程序存储器的地址指针。
答:错、错、对、对2-9:8031单片机复位后,R4所对应的存储单元的地址为(),因上电时PSW=()。
这时当前的工作寄存器区是()组工作寄存器区。
答:04H、00H、02-11:判断以下有关PC和DPTR的结论是否正确?A、DPTR是可以访问的,而PC不能访问。
B、它们都是16位的存储器C、它们都有加1的功能。
D、DPTR可以分为两个8位的寄存器使用,但PC不能。
答:对、对、对、对2-13:使用8031芯片时,需将/EA引脚接()电平,因为其片内无()存储器。
答:低、程序2-14:片内RAM低128个单元划分为哪3个主要部分?各部分的主要功能是什么?答:工作寄存器区、位寻址区、数据缓冲区2-15:判断下列说法是否正确A、程序计数器PC不能为用户编程时直接使用,因为它没有地址。
B、内部RAM的位寻址区,只能供位寻址使用,而不能供字节寻址使用。
哈理工单片机实验讲义

哈理工单片机实验讲义单片机原理(第 2分册)哈尔滨理工大学2021年7月1日- 1 -目录计算机控制实验室 (1)数据排序与多字节十进制加法实验...............(3)定时器 /计数器实验........................(7)外部中断实验............................(10) 8255扩展并行口实验.......................(13)串行口通讯实验.............................(15) A/D、D/A转换实验.. (21)单片机原理- 2 -撰写人姓名:____________ 撰写时间:_________________ 审查人姓名:_________________实验全过程记录实验名称时间数据排序与多字节十进制加法实验学号学号地点姓名同实验者 1:数据排序一实验目的:班组班组 1.了解数据排序的简单算法。
2.了解数列的有序和无序概念二实验内容:Size equ 5 Array equ 50h Change equ 0mov 50h,#02h mov 51h,#01h mov 52h,#03h mov53h,#05h mov 54h,#04h Sort:mov r0, #Array mov r7, #Size-1 clr ChangeGoon:mov a, @r0 mov r2, ainc r0- 3 -mov B, @r0 cjne a, B, NotEqual sjmp NextNotEqual:jc Nextsetb Change xch a, @r0 dec r0 xch a, @r0 inc r0 Next:djnz r7, Goon;jb Change, Sort ljmp $ end三实验用设备仪器及材料:计算机伟福实验箱万用表四实验原理图:- 4 -设置数据区地址设置数据区长度清除交换标志当前地址取数A 地址加1 当前地址取数B 是 A<=B?否设置交换标志否数据比较完是否全部有序?是交换A,B数位置五实验方法及步骤:有序的数列更有利于查找。
单片机原理及应用_哈尔滨工业大学_1 第一讲单片机概述_2 11单片机基础知识

灵活性强
简单方便 易学易掌握
08
658*695*180(单位:mil)
价格低
几元到几十元不等
04
单片机基础知识
——单片机的特点
嵌入到各种应用系统中
05
单片机基础知识
——单片机的特点
单片机的分类
通用型
• 人们通常所说是指通 用型单片机 • 内部可开发的资源全 部提供给用户
专用型
• 针对特定用途 • 全面综合地考虑结构 最简化、可靠性和成 本的最佳化
8位单片机
16位单片机
32位单片机
06
单片机基础知识
——单片机的特点
单片机+外围电路,灵活构成各种应用系统 工 业 自 动 检 测 监 视 系 统
数 据 采 集 系 统
智能仪器仪表
温湿度自动控制系统
07
单片机基础知识
——单片机的特点
优点突出,前景广阔
体积小 价格低
性价比高
嵌入容易
单片机系统
用途广泛
单片机基础知识
Harbin Institute of Technology
主讲人 张毅刚
单片机基础知识
——什么是单片机?
单片机的组成
单片机实质是用于控制目的单片微型计算机,简称单片机。
01
单片机基础知识
单片机应用广泛
——单片机的应用领域?
工业自动化
自动检测与控制
智能仪器仪表
机电一体化设备
汽车电子
家用电器
02
单片机基础知识
两种典型封装形式
——单片机的外形封装
双列Байду номын сангаас插(DIP)
方型封装 (PLCC或TQFP封装)
单片机原理及应用_哈尔滨工业大学_1 第一讲单片机概述_1 导学

第1讲导学
Intel的8051已成为国内外公认的8位单片机标准体系结构,被许多厂家作为基核,并推出多种兼容机型,在世界范围内得到广泛应用。
美国ATMEL公司的AT89S5x系列单片机,尤其是该系列中的AT89S51/AT89S52仍是目前应用较为广泛的机型,也是单片机初学者首选的入门机型。
本讲介绍单片机的基础知识、发展历史、发展趋势及应用领域,本讲除了对AT89S51单片机作以简单介绍外,还对目前应用较为广泛的非8051内核单片机,如PIC、AVR单片机作以了说明。
最后对对嵌入式处理器家族中其他成员如DSP、嵌入式微处理器进行了概括性的介绍,以使读者对其有初步了解,为后续学习DSP、嵌入式微处理器打下基础。
哈工大单片机张毅刚课件

单片机可以用于各种智能仪表,如电力仪表、水表、燃气表等,实现数据采集和传输。
02
工业控制
单片机在工业控制领域中应用广泛,如电机控制、温度控制等,具有可靠性高、抗干扰能力强等优点。
单片机编程语言及开发环境
02
良好的可读性和可维护性
高效率和高可靠性
广泛应用
C语言
Keil C51
单片机内部的存储器有限,通常需要扩展外部存储器以存储更多的数据。
了解资源的性质
在使用单片机内部资源前,需要了解每种资源的性质、特点和适用范围,以便正确地使用它们。
阅读相关资料
可以阅读单片机相关的技术手册、芯片手册等,了解单片机内部资源的具体使用方法。
编程实现
根据具体的应用场景,可以通过编程实现单片机内部资源的控制和使用。
Ethernet通信
使用以太网接口进行数据传输,实现局域网通信。
USB通信
使用USB接口进行数据传输。
使用红外线进行数据传输。
红外通信
蓝牙通信
Zigbee通信
使用蓝牙技术进行无线数据传输。
一种低速率的无线通信协议,适用于智能家居和其他物联网应用。
03
与其他外设的通信
02
01
单片机应用系统的设计流程
支持多种单片机编程
01
CodeWarrior是针对多种单片机编程的集成开发环境(IDE),支持多种芯片类型和应用场景。
CodeWarrior
功能强大且易用
02
CodeWarrior具有强大的功能和丰富的工具,同时具有易用的界面和操作流程,方便开发人员进行单片机应用开发。
提供完整的工具链
03
CodeWarrior提供了完整的工具链,包括编译器、汇编器、链接器、调试器等,方便开发人员进行单片机应用开发。
哈工大 嵌入式系统实验指导01
实验一:汇编指令实验1.实验目的z了解Keil uVision集成开发环境及软件仿真功能使用。
z掌握ARM7TDMI汇编指令的用法,并能编写简单的汇编程序。
z掌握指令的条件执行和使用LDR/STR指令完成存储器的访问。
z掌握基本的汇编程序调试。
2.实验设备z硬件:PC机一台z软件:WindowsXP系统,Keil uVision 4.0集成开发环境3.实验内容(1)使用LDR指令读取0x40000100地址上的数据,将数据加1。
若结果小于10,则使用STR指令把结果写回原地址;若结果大于等于10,则把0写回原地址。
(2)使用Keil uVision软件仿真,单步、全速运行程序,设置断点,打开寄存器窗口监视R0和R1的值,打开存储器观察窗口监视0x40000100地址上的值。
4.实验预习要求(1)学习ARM指令系统的内容,重点掌握LDR/STR指令和指令条件执行;(2)查阅Keil uVision 软件的介绍,了解软件的功能和操作方法。
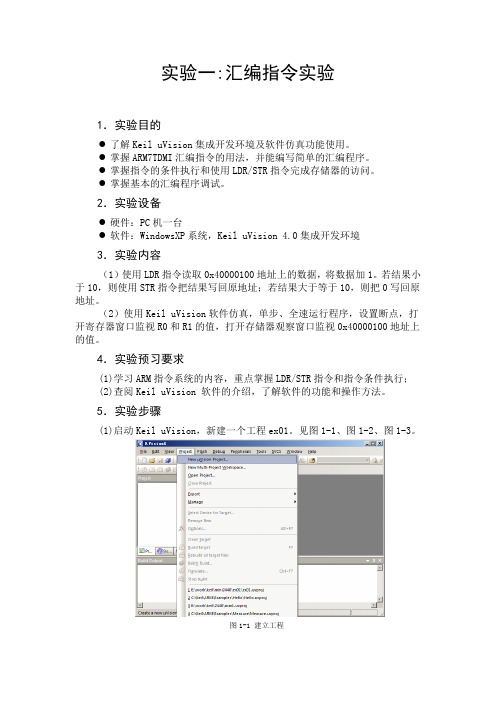
5.实验步骤(1)启动Keil uVision,新建一个工程ex01。
见图1-1、图1-2、图1-3。
图1-1 建立工程图1-2 选择目标芯片图1-3 不需要系统提供的Startup文件(2)建立汇编源文件ex01.s,编写实验程序,然后添加到工程中。
见图1-4、图1-5、图1-6、图1-7。
图1-4 建立新文件图1-5 保存扩展名为.s的汇编程序文件图1-6 把文件添加到工程图1-7 添加文件到工程后(3)设置工程选项,存储器映射。
见图1-8、图1-9。
图1-8 设置工程选项图1-9 设置存储器映射(4)编译链接工程。
见图1-10。
(5)进行软件仿真调试。
见图1-11、图1-12、图1-13、图1-14。
图1-11 调试运行图1-12 调试界面图1-13 设置断点图1-14 运行程序6.实验参考程序汇编指令实验的参考程序见程序清单1.1。
程序清单1.1 汇编指令实验参考程序COUNT EQU 0X40000100 ;定义一个变量,地址为0x40000100 AREA RESET, CODE, READONLY ;声明代码段RESETENTRY ;表示程序入口CODE32 ;声明32位ARM指令START LDR R1,=COUNT ;R1 ← COUNTMOV R0,#0 ;R0 ← 0STR R0,[R1] ;[R1] ← R0,即设置COUNT为0LOOP LDR R1,=COUNTLDR R0,[R1] ;R0 ← [R1]ADD R0,R0,#1 ;R0 ← R0 + 1CMP R0,#10 ;R0与10比较,影响条件码标志MOVHS R0,#0 ;若R0 >= 10, 则此指令执行,即R0 ← 0STR R0,[R1] ;[R1] ← R0,即保存COUNTB LOOPEND7.思 考(1)若使用LDRB/STRB代替程序清单中的所有加载/存储指令(LDR/STR),程序会得到正确的执行吗?(2)LDR伪指令与LDR加载指令的功能和应用有何区别,举例说明?(提示:LDR伪指令的形式为“LDR Rn,=expr”。
哈工大单片机实验代码(张毅刚版教材)(10个)

电路图用张毅刚版教材里给的图!!!!1、流水灯#include<reg52.h>#include<intrins.h>void delay(){unsigned char i,j;for(i=0;i<255;i++)for(j=0;j<255;j++);}void main(){P2=0xfe;while(1){P2=_crol_(P2,1);delay();}}2、单个外部中断#include<reg52.h>#include<intrins.h>void delay(unsigned char delay_time){unsigned int i,j;for(i=0;i<=delay_time;i++)for(j=0;j<=100;j++);}void init_tx(){EA=1;EX0=1;IT0=0;}void main(){P1=0x00;init_tx();delay(200);while(1){P1=~P1;delay(200);}}void tx0() interrupt 0{P1=0xfe;while(!INT0){P1=_crol_(P1,1);delay(200);}P1=0xff;}3、定时器#include<reg52.h>unsigned char t=20;sbit button=P3^2;sbit yellowled=P1^0;/* 定义接口*/void main(){TMOD=0x01;/* 选择中断方式*/ EA=1;ET0=1;TH0=0x3c;TL0=0x0b;while(button==0){TR0=1;}yellowled=1;}void tx() interrupt 1{TH0=0x3c;TL0=0xb0;t--;if(t==0){yellowled=~yellowled;t=20;}}4、双机串行通信#include<reg51.h>#define uchar unsigned char#define uint unsigned int#define outk P1#define out1 P0#define out2 P2uchar code seg[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff}; uchar key,send,rec;uchar scan(void);void delay(unit);void main(void){TMOD=0X20; TH1=0XF2;/* 设置定时器T1 为方式/* 给定时器T1 赋初值 */2*/TH1=0XF2;TR1=1;/* 接通定时器T1*/SCON=0X50;/* 串行口方式1, REN=1允许接收*/ PCON=0X00;/* SMOD=0*/EA=1;ES=1;EX1=1;EX0=1;while(1){outk=0x07;out1=seg[send];out2=seg[rec];}}uchar scan(void){uchar k=10,m,n,in;delay(10);outk=0x07;if((outk&0x07)!=0x07){for(m=0;m<3;m++){outk=~(0x01<<(m+3));for(n=0;n<3;n++){in=outk;in=in>>n;if((in&0x01)==0){if((in&0x01)==0){k=n+m*3;break;}}}if(k!=10)break;}}return(k);}void delay(uint j){uchar i;for(;j>0;j--){i=250;while(--i);i=249;while(--i);}}void ext0()interrupt 0{EX0=0;key=scan();if(key!=10)send=key+1;EX0=1;}void ext1()interrupt 2{ES=0;SBUF=send;while(!TI);TI=0;ES=1;}void com()interrupt 4{RI=0;rec=SBUF;}5、单片机与PC 串行通信#include <reg51.h>void send(unsigned char dat) {SBUF=dat;while(TI==0);;TI=0;}void init_tx(){EA=1;EX0=1;}void delay(void){unsigned char m,n;for(m=0;m<250;m++)for(n=0;n<250;n++);}void main(void){init_tx();TMOD=0x20;SCON=0x40;PCON=0x00;TH1=0xfd;TL1=0xfd;TR1=1;while(1);}void tx0() interrupt 0{unsigned char i=0;send(0x01);delay();i++;}6、扩展 82c55 并行 IO 接口#include<reg51.h>#include<absacc.h>#define uchar unsigned char #define uint unsigned intsbit rst_8255=P3^5;#define con_8255XBYTE[0x7003] #define pa_8255XBYTE[0x7000] #define pb_8255XBYTE[0x7001] void reset_8255(void);void delay(uint);void main(void){/*0x7003 为 82C55 的控制寄存器地址/* 以下定义pa、pb 的端口地址 */*/uchar temp;rst_8255=1;delay(1);rst_8255=0;con_8255=0x82;while(1){/* 复位 */temp=pb_8255;pa_8255=temp;/* 锁存 */}}void delay(uint j)/* 延时函数*/{uchar i;for(;j>0;j--){i=250;while(--i);i=249;while(--i);}}7、矩阵键盘#include<reg51.h>unsigned char codetable[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e}; void delay(){unsigned char i,j;(延时)for(i=0;i<=25;i++)for(j=0;j<=25;j++);}unsigned char key_scan(){unsigned char key0,key1;unsigned char key_num=0;P1=0x0f; 先将 p1.0~P1.3 置高key0=P1;if(key0!=0x0f) 如果 P1.4~P1.7 不全为 1,可能有键按下{delay();key0=P1;if(key0!=0x0f){P1=0xf0;key1=P1;if(key0==0x0e){switch(key1){case 0xe0: key_num=0;break;case 0xd0: key_num=1;break;case 0xb0: key_num=2;break;case 0x70: key_num=3;break;default: key_num=0;break;}}else if(key0==0x0d){switch(key1){case 0xe0: key_num=4;break;case 0xd0: key_num=5;break; ( 处理 5 号键 )case 0xb0: key_num=6;break;case 0x70: key_num=7;break;default: key_num=0;break;(无效按键,如多个键同时按下)}}else if(key0==0x0b){switch(key1){case 0xe0: key_num=8;break;case 0xd0: key_num=9;break;case 0xb0: key_num=10;break;case 0x70: key_num=11;break;default: key_num=0;break;}}else if(key0==0x07){switch(key1){case 0xe0: key_num=12;break;case 0xd0: key_num=13;break;case 0xb0: key_num=14;break;case 0x70: key_num=15;break;default: key_num=0;break;}}}}return key_num;}void main(){unsigned char key_num;do{key_num=key_scan();P2=table[key_num];}while(1);}8、 1602 液晶显示#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int#define out P0sbit RS=P2^0;sbit RW=P2^1;sbit E=P2^2;void lcd_initial(void);void check_busy(void);void write_command(uchar com);void write_data(uchar dat);void string(uchar ad,uchar *s);void lcd_test(void);void delay(uint);void main(void){lcd_initial();while(1){string(0x82,"Hello Welcome");string(0xC2,"To China");delay(100);write_command(0x01);delay(100);}}void delay(uint j){uchar i=250;for(;j>0;j--){while(--i);i=249;while(--i);i=250;}}void check_busy(void){uchar dt;do{dt=0xff;E=0;RS=0;RW=1;E=1;dt=out;}while(dt&0x80);E=0;}void write_command(uchar com){check_busy();E=0;RS=0;RW=0;out=com;E=1;_nop_();E=0;delay(1);}void write_data(uchar dat){check_busy();E=0;RS=1;RW=0;out=dat;E=1;_nop_();E=0;delay(1);}void lcd_initial(void){write_command(0x3c);write_command(0x0C);write_command(0x14);write_command(0x01);delay(1);}void string(uchar ad,uchar *s) {write_command(ad);while(*s>0){write_data(*s++);delay(100);}}9、 DA 转换#include<reg51.h>#define uchar unsigned char#define uint unsigned int#define out P1sbit DAC_cs=P2^0;sbit DAC_wr=P2^1;void main(void){uchar temp,i=255;while(1){{out=temp;DAC_cs=0; DAC_wr=0;/* 片选端,芯片被选中/* 选通,并被锁存*/*/DAC_cs=1;/* 以下开始转换*/DAC_wr=1;temp++;while(--i);/* 延时函数!!,老师帮改的*/}}}10、 AD 转换#include<reg51.h>#define uchar unsigned char#define uint unsigned int#define LED P0#define out P1sbit start=P2^1;sbit OE=P2^7;sbit EOC=P2^3;sbit CLOCK=P2^0;sbit add_a=P2^4;sbit add_b=P2^5;sbit add_c=P2^6;void main(void){uchar temp;add_a=0;add_b=0;add_c=0;while(1){start=0;start=1;start=0;while(1){CLOCK=!CLOCK;if(EOC==1){break;}OE=1;temp=out;OE=0;LED=temp;}}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题11.1什么是单片微型计算机?答:单片微型计算机是将计算机的基本部件微型化并集成到一块芯片上的微型计算机,是计算机微型化的典型代表之一,通常片内都含有CPU、ROM、RAM、并行I/O、串行I/O、定时器/计数器、中断控制、系统时钟及系统总线等。
1.2单片机的发展经历了哪几个阶段?在哪一阶段确立了单片机在嵌入式应用中的地位。
答:单片机初级阶段(1974—1976年),芯片化探索阶段(1976—1978年),8位单片机成熟阶段(1978—1982年),从SCM向MCU过渡阶段(1983—1990年),MCU百花齐放阶段(1990年—至今)。
其中,芯片化探索阶段(1976—1978年)确立了单片机在嵌入式应用中的地位。
1.3 单片机可分为几个系列?简述每个系列的主要特性。
答:单片机按系列可分为80C51系列、PIC系列和AVR系列等。
PIC系列单片机是Micro Chip公司的产品,与51系列单片机不兼容。
1) PIC系列单片机最大的特点是从实际出发,重视产品的性能与价格比,发展多种型号来满足不同层次的应用要求。
2) 精简指令使其执行效率大为提高。
3) 产品上市零等待(Zero time to market)。
4) PIC有优越开发环境。
5) 其引脚具有防瞬态能力,通过限流电阻可以接至220V交流电源,可直接与继电器控制电路相连,无须光电耦合器隔离,给应用带来极大方便。
6) 彻底的保密性。
7) 自带看门狗定时器,可以用来提高程序运行的可靠性。
8) 睡眠和低功耗模式。
AVR单片机是1997年由ATMEL公司研发出的增强型内置Flash的RISC(Reduced Instr uction Set CPU) 精简指令集高速8位单片机。
AVR单片机的主要特性1) AVR单片机以字作为指令长度单位,将内容丰富的操作数与操作码安排在一字之中(指令集中占大多数的单周期指令都是如此),取指周期短,又可预取指令,实现流水作业,故可高速执行指令。
2) AVR单片机硬件结构采取8位机与16位机的折中策略,即采用局部寄存器堆(32个寄存器文件)和单体高速输入/输出的方案(即输入捕获寄存器、输出比较匹配寄存器及相应控制逻辑)。
提高了指令执行速度(1MIPS/MHz),克服了瓶颈现象;同时又减少了对外设管理的开销,相对简化了硬件结构,降低了成本。
3) AVR单片机内嵌高质量的Flash程序存储器,擦写方便,支持ISP和IAP,便于产品的调试、开发、生产、更新。
4) AVR单片机的I/O线全部带可设置的上拉电阻、可单独设定为输入/输出、可设定(初始)高阻输入、驱动能力强(可省去功率驱动器件)等特性,使得I/O口资源灵活、功能强大、可充分利用。
5) AVR单片机片内具备多种独立的时钟分频器,分别供URAT、I2C、SPI使用。
6) 增强性的高速同/异步串口,具有硬件产生校验码、硬件检测和校验帧错、两级接收缓冲、波特率自动调整定位(接收时)、屏蔽数据帧等功能,提高了通信的可靠性,方便程序编写,更便于组成分布式网络和实现多机通信系统的复杂应用,串口功能大大超过MCS -51/96单片机的串口,加之AVR单片机高速,中断服务时间短,故可实现高波特率通讯。
7) 面向字节的高速硬件串行接口TWI、SPI。
TWI与I2C接口兼容,具备ACK信号硬件发送与识别、地址识别、总线仲裁等功能,能实现主/从机的收/发全部4种组合的多机通信。
SPI支持主/从机等4种组合的多机通信。
8) AVR单片机有自动上电复位电路、独立的看门狗电路、低电压检测电路BOD,多个复位源(自动上电复位、外部复位、看门狗复位、BOD复位),可设置的启动后延时运行程序,增强了嵌入式系统的可靠性。
9) AVR单片机具有多种省电休眠模式,且可宽电压运行(5~2.7V),抗干扰能力强,可降低一般8位机中的软件抗干扰设计工作量和硬件的使用量。
10) AVR单片机技术体现了单片机集多种器件(包括FLASH程序存储器、看门狗、EEPROM、同/异步串行口、 TWI、SPI、A/D模数转换器、定时器/计数器等)和多种功能(增强可靠性的复位系统、降低功耗抗干扰的休眠模式、品种多门类全的中断系统、具有输入捕获和比较匹配输出等多样化功能的定时器/计数器、具有替换功能的I/O端口等)于一身,充分体现了单片机技术的从“片自为战”向“片上系统SOC”过渡的发展方向1.4 简述单片机技术发展的趋势。
答:(1)单片机的大容量化单片机内存储器容量进一步扩大。
以往片内ROM为1KB~8KB,RAM为64字节~256字节。
现在片内ROM可达40KB,片内RAM可达4KB,I/O也不需再外加扩展芯片。
OTPROM、Flash ROM成为主流供应状态。
而随着单片机程序空间的扩大,在空余空间可嵌入实时操作系统RTOS等软件。
这将大大提高产品的开发效率和单片机的性能。
(2)单片机的高性能化高性能化主要是指进一步改进CPU的性能,加快指令运算的速度和提高系统控制的可靠性。
采用精简指令集(RISC)结构,可以大幅度提高运行速度。
并加强位处理功能、中断和定时控制功能;采用流水线结构,指令以队列形式出现在CPU中,因而具有很高的运算速度,有的甚至采用多级流水线结构。
单片机的扩展方式从并行总线到发展出各种串行总线,并被工业界接受,形成一些工业标准。
如I2C、SPI串行总线等。
它们采用3条数据总线代替现行的8条数据总线,从而减少了单片机引线,降低了成本。
单片机系统结构更加简化及规范化。
(3)单片机的小容量低廉化小容量低廉的4位、8位机也是单片机发展方向之一。
其用途是把以往用数字逻辑电路组成的控制电路单片化。
专用型的单片机将得到大力发展。
使用专用单片机可最大限度地简化系统结构,提高可靠性,使资源利用率最高。
在大批量使用时有可观的经济效益。
(4)单片机的外围电路内装化随着集成度的不断提高,可以把众多的外围功能器件集成到单片机内。
除了CPU、ROM、RAM外,还可把A/D、D/A转换器、DMA控制器、声音发生器、监视定时器、液晶驱动电路、锁相电路等一并集成在芯片内。
为了减少外部的驱动芯片,进一步增强单片机的并行驱动能力。
有的单片机可直接输出大电流和高电压,以便直接驱动显示器。
为进一步加快I/O口的传输速度,有的单片机还设置了高速I/O口,可用最快的速度驱动外部设备,也可以用最快的速度响应外部事件。
甚至单片机厂商还可以根据用户的要求量身定做,把所需要的外围电路全部集成在单片机内,制造出具有自己特色的单片机。
(5)单片机的全面CMOS化单片机的全面CMOS化,将给单片机技术发展带来广阔的天地。
CMOS芯片除了低功耗特性之外,还具有功耗的可控性,使单片机可以工作在功耗精细管理状态。
低功耗的技术措施可提高可靠性,降低工作电压,可使抗噪声和抗干扰等各方面性能全面提高。
单片机的全盘CMOS化的效应不仅是功耗低,而且带来了产品的高可靠性、高抗干扰能力以及产品的便携化。
(6)单片机的应用系统化单片机是嵌入式系统的独立发展之路,单片机向MCU发展的重要因素,就是寻求应用系统在芯片上的最大化解决。
因此,专用单片机的发展自然形成了SOC(System on Chip)化趋势。
随着微电子技术、IC设计、EDA工具的发展,基于SOC的单片机应用系统设计会有较大的发展。
因此,随着集成电路技术及工艺的快速发展,对单片机的理解可以从单片微型计算机、单片微控制器延伸到单片应用系统。
1.5 单片机具有哪些突出优点?举例说明单片机的应用领域。
答:1.单片机寿命长所谓寿命长,一方面指用单片机开发的产品可以稳定可靠地工作十年、二十年,另一方面是指与微处理器相比生存周期长。
MPU更新换代的速度越来越快,以386、486、586为代表的MPU,几年内就被淘汰出局。
而传统的单片机如 8051、68HC05等年龄已有二十多岁,产量仍是上升的。
一些成功上市的相对年轻的CPU核心,也会随着I/O功能模块的不断丰富,有着相当长的生存周期。
2.8位、32位单片机共同发展这是当前单片机技术发展的另一动向。
长期以来,单片机技术的发展是以8位机为主的。
随着移动通讯、网络技术、多媒体技术等高科技产品进入家庭,32位单片机应用得到了长足、迅猛的发展。
3.低噪声与高速度为提高单片机抗干扰能力,降低噪声,降低时钟频率而不牺牲运算速度是单片机技术发展之追求。
一些8051单片机兼容厂商改善了单片机的内部时序,在不提高时钟频率的条件下,使运算速度提高了很多。
Motorola单片机使用了琐相环技术或内部倍频技术使内部总线速度大大高于时钟产生器的频率。
68HC08单片机使用4.9MHz外部振荡器而内部时钟达32MHz。
三星电子新近推出了1.2GHz的ARM处理器内核。
4.低电压与低功耗几乎所有的单片机都有Wait、Stop等省电运行方式。
允许使用的电源电压范围也越来越宽。
一般单片机都能在3~6V范围内工作,对电池供电的单片机不再需要对电源采取稳压措施。
低电压供电的单片机电源下限已由2.7V降至2.2V、1.8V。
0.9V供电的单片机已经问世。
5.低噪声与高可靠性为提高单片机系统的抗电磁干扰能力,使产品能适应恶劣的工作环境,满足电磁兼容性方面更高标准的要求,各单片机商家在单片机内部电路中采取了一些新的技术措施。
如ST 公司的由标准8032核和PSD(可编程系统器件)构成的μPSD系列单片机片内增加了看门狗定时器,NS公司的COP8单片机内部增加了抗EMI电路,增强了“看门狗”的性能。
Motorola推出了低噪声的LN系列单片机。
6.ISP与IAPISP(In-System Programming)技术的优势是不需要编程器就可以进行单片机的实验和开发,单片机芯片可以直接焊接到电路板上,调试结束即成成品,免去了调试时由于频繁地插入取出芯片对芯片和电路板带来的不便。
IAP(In-Application Programming)技术是从结构上将Flash存储器映射为两个存储体,当运行一个存储体上的用户程序时,可对另一个存储体重新编程,之后将程序从一个存储体转向另一个。
ISP的实现一般需要很少的外部电路辅助实现,而IAP的实现更加灵活,通常可利用单片机的串行口接到计算机的RS232口,通过专门设计的固件程序来编程内部存储器,可以通过现有的INTERNET或其它通讯方式很方便地实现远程升级和维护。
单片机的应用领域:1)智能化家用电器:各种家用电器普遍采用单片机智能化控制代替传统的电子线路控制,升级换代,提高档次。
如洗衣机、空调、电视机、录像机、微波炉、电冰箱、电饭煲以及各种视听设备等。
2)办公自动化设备:现代办公室使用的大量通信和办公设备多数嵌入了单片机。
如打印机、复印机、传真机、绘图机、考勤机、电话以及通用计算机中的键盘译码、磁盘驱动等。