LINUX字符设备驱动编写基本流程
linux驱动开发知识点总结

linux驱动开发知识点总结Linux驱动开发是指在Linux操作系统下开发和编写设备驱动程序的过程。
Linux作为一种开源操作系统,具有广泛的应用领域,因此对于驱动开发的需求也非常重要。
本文将从驱动程序的概念、驱动开发的基本步骤、常用的驱动类型以及驱动开发的注意事项等方面进行总结。
一、驱动程序的概念驱动程序是指控制计算机硬件和软件之间通信和交互的程序。
在Linux系统中,驱动程序负责与硬件设备进行交互,实现对硬件的控制和管理。
二、驱动开发的基本步骤1. 确定驱动的类型:驱动程序可以分为字符设备驱动、块设备驱动和网络设备驱动等。
根据具体的硬件设备类型和需求,选择合适的驱动类型。
2. 编写设备注册函数:设备注册函数用于向系统注册设备,使系统能够识别和管理该设备。
3. 实现设备的打开、关闭和读写操作:根据设备的具体功能和使用方式,编写设备的打开、关闭和读写操作函数。
4. 实现设备的中断处理:如果设备需要进行中断处理,可以编写中断处理函数来处理设备的中断请求。
5. 编写设备的控制函数:根据设备的需求,编写相应的控制函数来实现对设备的控制和配置。
6. 编译和安装驱动程序:将编写好的驱动程序进行编译,并将生成的驱动模块安装到系统中。
三、常用的驱动类型1. 字符设备驱动:用于控制字符设备,如串口、打印机等。
字符设备驱动以字符流的方式进行数据传输。
2. 块设备驱动:用于控制块设备,如硬盘、U盘等。
块设备驱动以块为单位进行数据传输。
3. 网络设备驱动:用于控制网络设备,如网卡。
网络设备驱动实现了数据包的收发和网络协议的处理。
4. 触摸屏驱动:用于控制触摸屏设备,实现触摸操作的识别和处理。
5. 显示驱动:用于控制显示设备,实现图像的显示和刷新。
四、驱动开发的注意事项1. 熟悉硬件设备的规格和寄存器的使用方法,了解硬件设备的工作原理。
2. 确保驱动程序的稳定性和可靠性,避免出现系统崩溃或死机等问题。
3. 对于需要频繁访问的设备,要考虑性能问题,尽量减少对硬件的访问次数。
实验二:字符设备驱动实验

实验二:字符设备驱动实验一、实验目的通过本实验的学习,了解Linux操作系统中的字符设备驱动程序结构,并能编写简单的字符设备的驱动程序以及对所编写的设备驱动程序进行测试,最终了解Linux操作系统如何管理字符设备。
二、准备知识字符设备驱动程序主要包括初始化字符设备、字符设备的I/O调用和中断服务程序。
在字符设备驱动程序的file_operations结构中,需要定义字符设备的基本入口点。
open()函数;release()函数read()函数write()函数ioctl()函数select()函数。
另外,注册字符设备驱动程序的函数为register_chrdev()。
register_chrdev() 原型如下:int register_chrdev(unsigned int major, //主设备号const char *name, //设备名称struct file_operations *ops); //指向设备操作函数指针其中major是设备驱动程序向系统申请的主设备号。
如果major为0,则系统为该驱动程序动态分配一个空闲的主设备号。
name是设备名称,ops是指向设备操作函数的指针。
注销字符设备驱动程序的函数是unregister_chrdev(),原型如下:int unregister_chrdev(unsigned int major,const char *name);字符设备注册后,必须在文件系统中为其创建一个设备文件。
该设备文件可以在/dev目录中创建,每个设备文件代表一个具体的设备。
使用mknod命令来创建设备文件。
创建设备文件时需要使用设备的主设备号和从设备号作为参数。
阅读教材相关章节知识,了解字符设备的驱动程序结构。
三、实验内容根据教材提供的实例。
编写一个简单的字符设备驱动程序。
要求该字符设备包括open()、write()、read()、ioctl()和release()五个基本操作,并编写一个测试程序来测试所编写的字符设备驱动程序。
Linux中设备驱动程序的编写

Ln x作 为 源代 码 开 放 、 定 、 iu 稳 网络 功 能强 大 的免 费系统 , 经越 来越 广泛 应 用 于各个 领域 。 已 Ln x系统是从 Unx系统 演 变而来 , iu i 故其 驱 动程 序 的设计 思 想 和 Unx系 统 驱 动 程 序 相 似 。 当前 , i 还 有 相 当一部 分特殊 设备在 L n x系统 中找不到驱 动 iu
1 Ln x中的 设备 i u
‘ 1 1 设 备 文 件 .
化 。这部 分驱动 程序仅 在初 始化 的时候 调用一 次 。
() 2 服务 于 IO请求 的子程序 /
调 用 这 部 分 是 由 于 系 统 调 用 的 结 果 。这 部 分 程
每个设 备用 “ 备 文件 ” 代 表 , 有 对硬 件 设 设 来 所
2 Ln x中 的设 备 驱 动 程 序 的 编 写 i u
2 1 Ln x下 设 备 驱 动 程 序 的 基 本 结 构 . i u
对 用 户程 序 而 言 , 备 驱 动程 序 隐藏 了设 备 的 设 具体细 节 , 对各 种 不 同设 备提 供 了一 致 的接 口。一 般设 备驱动程 序可 以分 为三个 主要 组成部 分 : () 1 自动 配置 和初始 化子 程序 自动配 置和 初 始 化 子 程 序 常 在 相应 的 d ie— r r v ii ) nt 中实 现 , ( 负责检 测所要 驱动 的硬件 设备 是 否存 在和是 否 能正常 工 作 。如 果该 设 备 正 常 , 则对 这 个 设 备及其 相关 的设备驱 动程 序需要 的状 态进行 初始
文 件和字 符设备 文件 。通过 块 ( 符) 备文件 存取 字 设 的设备称 为块 ( 字符 ) 设备 。 1 3 设备 号 的表示 . 设备 由一个 主设 备号和 一个 次设 备号标识 。主
嵌入式linux驱动开发流程

三、设备的中断和轮询处理
对于不支持中断的设备,读写时需要轮询设备状态,以及是否需要继续进行数据传输。例如,打印机。如果设备支持中断,则可按照中断方式进行。
struct file_operations Key7279_fops =
{
.open = Key7279_Open,
.ioctl = Key7279_Ioctl,
.release = Key7279_Close,
.read = Key7279_Read,
};
1、 设备的打开和释放
模块在使用中断前要先请求一个中断通道(或者 IRQ中断请求),并在使用后释放它。通过request_irq()函数来注册中断,free_irq()函数来释放。
四、驱动程序的测试
对驱动程序的调试可以通过打印的方式来进行,就是通过在驱动程序中添加printk()打印函数,来跟踪驱动程序的执行过程,以此来判断问题。
◇ 设备的打开和释放。
ห้องสมุดไป่ตู้◇ 设备的读写操作。
◇ 设备的控制操作。
◇ 设备的中断和轮询处理。
Linux主要将设备分为三类:字符设备、块设备和网络设备。字符设备是指发送和接收数据以字符的形式进行,没有缓冲区的设备;块设备是指发送和接收数据以整个数据缓冲区的形式进行的设备;网络设备是指网络设备访问的BSD socket 接口。下面以字符设备为例,写出其驱动编写框架:
二、 构造file_operations结构中要用到的各个成员函数
Linux操作系统将所有的设备都看成文件,以操作文件的方式访问设备。应用程序不能直接操作硬件,使用统一的接口函数调用硬件驱动程序,这组接口被成为系统调用。每个系统调用中都有一个与之对应的函数(open、release、read、write、ioctl等),在字符驱动程序中,这些函数集合在一个file_operations类型的数据结构中。以一个键盘驱动程序为例:
linux字符驱动框架(用户态的read,write,poll是怎么操作驱动的)
linux字符驱动框架(⽤户态的read,write,poll是怎么操作驱动的)前⾔这篇⽂章是通过对⼀个简单字符设备驱动的操作来解释,⽤户态的读写操作是怎么映射到具体设备的。
因为针对不同版本的linux内核,驱动的接⼝函数⼀直有变化,这贴出我测试的系统信息:root@ubuntu:~/share/dev/cdev-2# cat /etc/os-release |grep -i verVERSION="16.04.5 LTS (Xenial Xerus)"VERSION_ID="16.04"VERSION_CODENAME=xenialroot@ubuntu:~/share/dev/cdev-2#root@ubuntu:~/share/dev/cdev-2# uname -r4.15.0-33-generic字符驱动这⾥给出了⼀个不怎么标准的驱动,定义了⼀个结构体 struct dev,其中buffer成员模拟驱动的寄存器。
由wr,rd作为读写指针,len作为缓存buffer的长度。
具体步骤如下:1. 定义 init 函数,exit函数,这是在 insmod,rmmod时候调⽤的。
2. 定义驱动打开函数open,这是在⽤户态打开设备时候调⽤的。
3. 定义release函数,这是在⽤户态关闭设备时候⽤到的。
4. 定义read,write,poll函数,并挂接到 file_operations结构体中,所有⽤户态的read,write,poll都会最终调到这些函数。
chardev.c/*参考:深⼊浅出linux设备驱动开发*/#include <linux/module.h>#include <linux/init.h>#include <linux/fs.h>#include <linux/uaccess.h>#include <linux/wait.h>#include <linux/semaphore.h>#include <linux/sched.h>#include <linux/cdev.h>#include <linux/types.h>#include <linux/kdev_t.h>#include <linux/device.h>#include <linux/poll.h>#define MAXNUM 100#define MAJOR_NUM 400 //主设备号 ,没有被使⽤struct dev{struct cdev devm; //字符设备struct semaphore sem;int flag;poll_table* table;wait_queue_head_t outq;//等待队列,实现阻塞操作char buffer[MAXNUM+1]; //字符缓冲区char *rd,*wr,*end; //读,写,尾指针}globalvar;static struct class *my_class;int major=MAJOR_NUM;static ssize_t globalvar_read(struct file *,char *,size_t ,loff_t *);static ssize_t globalvar_write(struct file *,const char *,size_t ,loff_t *);static int globalvar_open(struct inode *inode,struct file *filp);static int globalvar_release(struct inode *inode,struct file *filp);static unsigned int globalvar_poll(struct file* filp, poll_table* wait);/*结构体file_operations在头⽂件 linux/fs.h中定义,⽤来存储驱动内核模块提供的对设备进⾏各种操作的函数的指针。
如何编写Linux设备驱动程序

Ke wo d y rs: L n x S s e i u y t m;D v c r v r e i e D i e
0 引言
w i e c oe等。如何把系统调用和驱动 程序关联起来 , rt 、l s 这 需要 了解一个 非常关键的数 据结 构:i e o ea i n 。 f l— p r t o s 这个
—
样对硬件设备进行操作。设备驱动程序是 内核的一 部分 ,
①对设备初始化和释放 ;
它完成以下功 能: ②把数据传送到硬 件和从硬件读取数据 ; ④读 取应用程序传送给设备 文件的数据和 回送 应用程 序请求 的数据 ; ④检查和处理设备 出现 的错误。
2 实 例 剖 析
f l ’i ec a b f i tc u t ( ie f l ,hr u ,n o n )
关 键 词 :Ln x 作 系统 ; 备 驱 动 程 序 iu 操 设
中图分类号 :T 3 4 P1
文献标识码 : A
文章编号 : 6 1 49 一 20 )— 09 0 1 7 — 7 2 (088 09 — 2
Ab t c : T e o c p o i u d v c d i e s a i t o u e , a d h n h i t r a m c a i m a d h s r t h c n e t f L n x e i e r v r w s n r d c d a n t e t e n e n l e h n s s n t e
1 iu e i r e 的概 念 l xd vc di r n e v
结构的每一个成员的名字都对应着一个系统调用。 用户进程 利用系统调用在对设备 文件进行诸如 ra/rt edwie操作时, 系统调 用通过设备文件 的主设 备号找 到相应 的设备 驱动程
基于linux2.6内核的字符设备驱动程序设计
, sr t t uc
o ne = TH I M ODULE; w r S
… … … … …
//获 取 字 符 设 备 号
2ce d v结构体
存 ln x2. 核 中 , 用 c e 结 构 体 描 iu 6内 使 dv 述 一 个 字 符 设 备 , d v结 构 体 定 义 如 下 : ce
.
_
的 结构 体 , 中 包 含设 备所 涉 及 到 的c e 其 d v、 私有数据及信号量等信息 。 下所 示: 如 / 设 备 结 构 体 /
sr t t uc XXX—d v t —e
— —
{, i e t l f t ) sz , of ;
_ —
f
s r t de c v; t uc c v de
s ie sz
— —
ቤተ መጻሕፍቲ ባይዱ
/ /从 设 备 中 同 步 读 取 数 据 t* ie(tutf e} h r u r (wrt) rc i .c a s s l e
—
}, i e t, l f t { ; sz of )
//该 设 备 其 他 的 私 有 数 据 和 信 号 量 的 信 息 的 定 义
… …
/ /向 设 备 发 送 数 据 u sg e n * o1 sr c i ,src n in d it(p l(tutfl ) e十 tu t
p l t bl sr c ) o l a e tu t :
—
}X —e X X d v; 模 块 加 载 和 卸 载 函数 的 形 式 如 下 : /+ 备 驱 动 模 块 加 载 函 数 / 设
・
计 算机技 术 ・
基 于 l u 26 i x . 内核 的字 符 设 备驱 动程 序设 计 n
linux-GPIO驱动实验

GPIO驱动实验一、实验目的1.理解Linux GPIO驱动程序的结构、原理。
2.掌握Linux GPIO驱动程序的编程。
3.掌握Linux GPIO动态加载驱动程序模块的方法。
二、实验内容1. 编写GPIO字符设备驱动程序。
2. 编写Makefile文件。
3. 编写测试程序。
4. 调试GPIO驱动程序和测试程序。
三、实验设备1.硬件:PC机,基于ARM9系统教学实验系统实验箱1台;网线;串口线,电压表。
2.软件:PC机操作系统;Putty;服务器Linux操作系统;arm-v5t_le-gcc交叉编译环境。
3.环境:ubuntu12.04.4;文件系统版本为filesys_clwxl;烧写的内核版本为uImage_slh_gpio,编译成的驱动模块为davinci_dm365_gpios.ko,驱动源码见GPIO文件夹。
四.预备知识4.1 概述在嵌入式系统中,常常有数量众多,但是结构却比较简单的外部设备/电路,对这些设备/电路有的需要CPU为之提供控制手段,有的则需要被CPU用作输入信号。
而且,许多这样的设备/电路只要求一位,即只要有开/关两种状态就够了,例如灯的亮与灭。
对这些设备/电路的控制,使用传统的串行口或并行口都不合适。
所以在微控制器芯片上一般都会提供一个通用可编程I/O接口,即GPIO (General Purpose Input Output)。
GPIO的驱动主要就是读取GPIO口的状态,或者设置GPIO口的状态。
就是这么简单,但是为了能够写好的这个驱动,在LINUX上作了一些软件上的分层。
为了让其它驱动可以方便的操作到GPIO,在LINUX里实现了对GPIO操作的统一接口,这个接口实则上就是GPIO驱动的框架。
在本实验中,将编写简单的GPIO驱动程序来控制LCD液晶屏屏幕的亮灭,然后动态加载模块,并编写测试程序,以验证驱动程序。
4.2 实现的功能1> 设置对应的GPIO口为输出。
linux设备驱动程序的设计与实现

linux设备驱动程序的设计与实现
Linux设备驱动程序的设计与实现是一个涉及底层系统编程和硬件交互的复杂过程。
下面是一个简单的步骤指南,以帮助你开始设计和实现Linux设备驱动程序:
1. 了解硬件:首先,你需要熟悉你要驱动的硬件设备的规格和特性。
这包括硬件的内存空间、I/O端口、中断请求等。
2. 选择驱动程序模型:Linux支持多种设备驱动程序模型,包括字符设备、块设备、网络设备等。
根据你的硬件设备和需求,选择合适的驱动程序模型。
3. 编写Makefile:Makefile是一个文本文件,用于描述如何编译和链接你的设备驱动程序。
它告诉Linux内核构建系统如何找到并编译你的代码。
4. 编写设备驱动程序:在Linux内核源代码树中创建一个新的驱动程序模块,并编写相应的C代码。
这包括设备注册、初始化和卸载函数,以及支持读写和配置硬件的函数。
5. 测试和调试:编译你的设备驱动程序,并将其加载到运行中的Linux内核中。
使用各种测试工具和方法来验证驱动程序的正确性和稳定性。
6. 文档和发布:编写清晰的文档,描述你的设备驱动程序的用途、用法和已知问题。
发布你的代码以供其他人使
用和改进。
linux 开发新驱动步骤

linux 开发新驱动步骤Linux作为一款开源的操作系统,其内核源码也是开放的,因此,许多开发人员在Linux上进行驱动开发。
本文将介绍在Linux上进行新驱动开发的步骤。
第一步:确定驱动类型和接口在进行驱动开发前,需要确定驱动类型和接口。
驱动类型包括字符设备驱动、块设备驱动、网络设备驱动等。
接口包括设备文件、系统调用、ioctl等。
根据驱动类型和接口的不同,驱动开发的流程也有所不同。
第二步:了解Linux内核结构和API驱动开发需要熟悉Linux内核的结构和API。
Linux内核由许多模块组成,每个模块都有自己的功能。
API是应用程序接口,提供了许多函数和数据结构,开发人员可以使用这些函数和数据结构完成驱动开发。
第三步:编写驱动代码在了解了Linux内核结构和API后,就可以编写驱动代码了。
驱动代码需要按照Linux内核的编码规范编写,确保代码风格统一、可读性好、可维护性强等。
在编写代码时,需要使用API提供的函数和数据结构完成相应的功能。
第四步:编译驱动代码和内核模块驱动代码编写完成后,需要编译成内核模块。
编译内核模块需要使用内核源码中的Makefile文件。
编译完成后,会生成一个.ko文件,这个文件就是内核模块。
第五步:加载和卸载内核模块内核模块编译完成后,需要加载到Linux系统中。
可以使用insmod命令加载内核模块,使用rmmod命令卸载内核模块。
在加载和卸载内核模块时,需要注意依赖关系,确保依赖的模块已经加载或卸载。
第六步:调试和测试驱动开发完成后,需要进行调试和测试。
可以使用printk函数输出调试信息,在/var/log/messages文件中查看。
测试时需要模拟各种可能的情况,确保驱动程序的稳定性和可靠性。
Linux驱动开发需要掌握Linux内核结构和API,熟悉驱动类型和接口,按照编码规范编写驱动代码,并进行编译、加载、调试和测试。
只有掌握了这些技能,才能进行高效、稳定和可靠的驱动开发。
Linux I2C设备驱动编写
Linux I2C设备驱动编写(一)在Linux驱动中I2C系统中主要包含以下几个成员:如果一个I2C适配器不支持I2C通道,那么就将master_xfer成员设为NULL。
如果适配器支持SMBUS 协议,那么需要去实现smbus_xfer,如果smbus_xfer指针被设为NULL,那么当使用SMBUS协议的时候将会通过I2C通道进行仿真。
master_xfer指向的函数的返回值应该是已经成功处理的消息数,或者返回负数表示出错了。
functionality指针很简单,告诉询问着这个I2C主控器都支持什么功能。
在内核的drivers/i2c/i2c-stub.c中实现了一个i2c adapter的例子,其中实现的是更为复杂的SMBUS。
SMBus 与I2C的区别通常情况下,I2C和SMBus是兼容的,但是还是有些微妙的区别的。
时钟速度对比:在电气特性上他们也有所不同,SMBus要求的电压范围更低。
I2C driver具体的I2C设备驱动,如相机、传感器、触摸屏、背光控制器常见硬件设备大多都有或都是通过I2C 协议与主机进行数据传输、控制。
结构体如下:如同普通设备的驱动能够驱动多个设备一样,一个I2C driver也可以对应多个I2C client。
以重力传感器AXLL34X为例,其实现的I2C驱动为:这里要说明一下module_i2c_driver宏定义(i2c.h):module_driver():理解上述宏定义后,将module_i2c_driver(adxl34x_driver)展开就可以得到:这一句宏就解决了模块module安装卸载的复杂代码。
这样驱动开发者在实现I2C驱动时只要将i2c_driver结构体填充进来就可以了,无需关心设备的注册与反注册过程。
I2C client即I2C设备。
I2C设备的注册一般在板级代码中,在解析实例前还是先熟悉几个定义:下面还是以adxl34x为例:这样ADXL34X的i2c设备就被注册到了系统中,当名字与i2c_driver中的id_table中的成员匹配时就能够出发probe匹配函数了。
如何编写Linux下的USB键盘驱动
{
int result = usb_register(&usb_kbd_driver);/*注册USB键盘驱动*/
if (result == 0) /*注册失败*/
info(DRIVER_VERSION ":" DRIVER_DESC);
return result;
}
7. 编写模块卸载函数(每个驱动都会有一个卸载函数,由 module_exit 调用):
/*若同时只按下1个按键则在第[2]个字节,若同时有两个按键则第二个在第[3]字节,类推最多 可有6个按键同时按下*/ for (i = 2; i < 8; i++) { /*获取键盘离开的中断*/
if (kbd->old[i] > 3 && memscan(kbd->new + 2, kbd->old[i], 6) == kbd->new + 8) {/* 同时没有该KEY的按下状态*/
if (usb_kbd_keycode[kbd->old[i]]) {
input_report_key(kbd->dev, usb_kbd_keycode[kbd->old[i]], 0); } else
info("Unknown key (scancode %#x) released.", kbd->old[i]); }
接口类;鼠标为3,1,2*/
{}
/* Terminating entry */
};
MODULE_DEVICE_TABLE (usb, usb_kbd_id_table);/*指定设备 ID 表*/
4. 定义 USB 键盘结构体:
Linux字符设备驱动开发方法与应用实例
 ̄l a0 re) led 和w i ( : r t 调用等 ; 还包含对用户发出的控制请求
的响 应 , 比如 启动 或 关 闭 设备 等 。由于用 户发 出 的I 功 / O 能 调 用 和控 制请 求 是在 确 定 的 时间 内发 生 , 以它是 同 所 步 事 件 , 执 行 的先 后 顺 序上 看 , 在 中断 程 序 的后 面 从 它
P  ̄ 的并 口控制卡经常使用 的2 / 并 口基地 址 cJ L 个I O 是0 3 8 x 7 , x 7 和0 2 8 在并 口通信 中使 用的电平信号 是标
准的T L T 电平 : 伏和5 我们要把驱动程序 的下部分 0 伏。
被执行, 所以把它称为驱动程序的下半部 。
FI NANCI AL coM PUTE
驱动 程序的代码按照执 行时 间是 否确定, 可将其分为
同步 执 行 和 异 步 执 行 的 代码 。 Ln x 在 iu 内核 中把 同步 执
行 的代码 称为驱动程序 的下半部 , 把异步执 行的代码
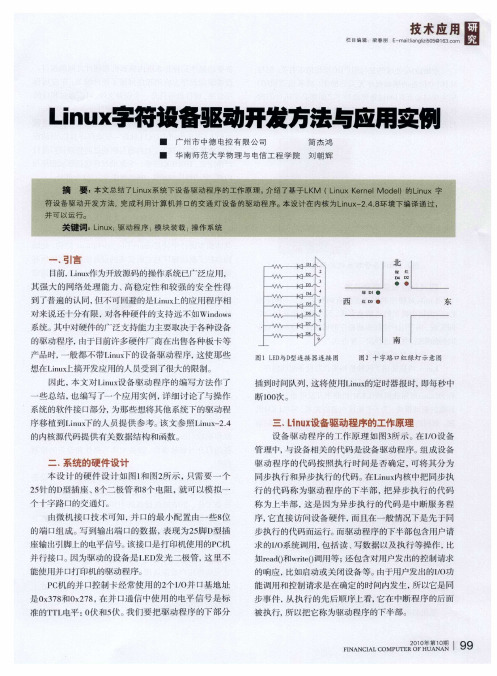
个十字路 口的交通灯。
由微 机 接 口技 术 可知 , 口的 最 小 配 置 由一 些 8 并 位 的 端 口组 成 。 到输 出 端 口的 数 据 , 现 为 2 脚 D 插 写 表 5 型
一
捅到时间队列, 这将使用Ln x i 的定时器报时, u 即每秒中
断 l0 。 0次
些总结 , 也编 写 了一个 应 用 实例 , 细 讨 论 了与 操 作 详
系统的软件 接口部分, 为那些想将其他 系统下的驱动程 序移植 ̄ Ln x J l iu下的人员提供参 考。 该文参 ̄Ln x24 i 一. u 的内核源代码提供有关数据结构和函数。
字符设备驱动程序的基本步骤

字符设备驱动程序的基本步骤字符设备驱动程序的基本步骤一.设备号对字符设备的访问是通过文件系统内的设备名称来访问的,设备名称位于目录/dev下.为了便于系统管理,设置了和设备名称一一对应的设备号,它分为主设备号和次设备号.通常来说,主设备号标示了设备对应的驱动程序,次设备号则用来分辨拥有同一个主设备号的的各个不同设备.在内核中,设备号使用类型dev_t来保存,它包括了主设备号和次设备号.dev_t是一个32位的整数,其中的12位用来标示主设备号,其余的20位用来标示次设备号.我们可以使用两个宏来获得设备的主设备号及次设备号:MAJOR(dev_t dev_id);MINOR(dev_t dev_id);将主设备号和次设备号转换为dev_t类型,则可以使用下面的宏:MKDEV(int major, int minor);其中,major为主设备号,minor为次设备号.二.分配设备号在建立一个字符设备之前.首先要申请设备号,完成该功能的函数有两个,都包含在头文件中.下面分别来看这两个文件:1.int register_chrdev_region(dev_t first, unsigned int count, char *name);其中, first为要分配的设备编号范围的起始值,经常被置零.count则是所请求的连续设备编号的个数,这意味着只能申请连续的设备编号.2.int alloc_chrdev_region(dev_t *dev, unsigned firstminor, int count, char *name);其中dev用于保存申请成功后动态分配的第一个设备号, firstminor则是请求使用的第一个次设备号.其余与上个函数相同.三.定义并初始化file_operations结构体.file_operations结构体用于连接设备号和驱动程序的操作.在该结构体的内部包含了一组函数指针,这些函数用来实现系统调用.通常情况下,要注册如下的几个函数:1.struct module *owner:用来指向拥有该结构体的模块.2.ssize_t read(struct file *filp, char __user *buf, size_t count, loff_t *f_ops):用来从设备中读取数据.其中:filp为文件属性结构体指针.buf为用户态函数使用的字符内存缓冲.count为要读取的数据数.f_ops为文件指针的偏移量.2.ssize_t write(struct file *filp, const char __user *buf, size_t count, loff_t *f_ops):用来向设备输入数据.各函数的含义与上个函数相同.3.int open(struct inode *inode, struct file *):该函数用来打开一个设备文件.4.int release(struct inode *inode, struct file *):该函数用来关闭一个设备文件.该结构体的初始化形式如下例:struct file_operations scull_fops = {.owner = THIS_MODULE,.read = read,.write = write,.open = open,.release = release,}四.字符设备的注册.内核内部使用struct cdev结构来表示字符设备.在内核调用设备的操作之前,必须分配或注册一个或者多个该结构体.该结构体包含在头文件中.一般的步骤如下:首先定义该结构体:struct cdev my_cdev;然后即可以初始化该结构,使用如下的函数初始化:int cdev_init(struct cdev *dev, struct file_operations *fops).然后定义该结构体中的一个所有者字段:my_cdev.owner = THIS_MODULE;最后即可以向模块添加该结构体:int cdev_add(struct cdev *dev, dev_t dev_num, usigned int count).其中dev是cdev结构体,dev_num是该设备对应的第一个设备编号, count则是与该设备关联的设备编号数量.五.移除字符设备void cdev_del(struct cdev *dev);六.注销设备号.unregister_chrdev_region(dev_t first, unsigned int count);以上两个函数一般用于模块出口函数中.。
linux设备驱动spi详解5-应用到驱动的完整流程
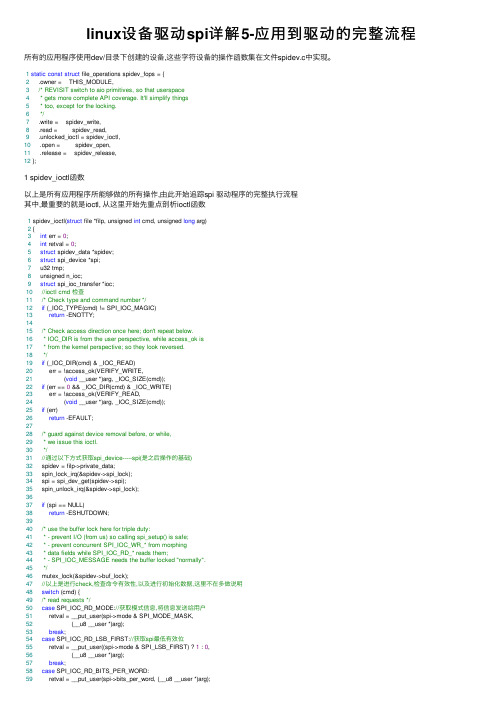
linux设备驱动spi详解5-应⽤到驱动的完整流程所有的应⽤程序使⽤dev/⽬录下创建的设备,这些字符设备的操作函数集在⽂件spidev.c中实现。
1static const struct file_operations spidev_fops = {2 .owner = THIS_MODULE,3/* REVISIT switch to aio primitives, so that userspace4 * gets more complete API coverage. It'll simplify things5 * too, except for the locking.6*/7 .write = spidev_write,8 .read = spidev_read,9 .unlocked_ioctl = spidev_ioctl,10 .open = spidev_open,11 .release = spidev_release,12 };1 spidev_ioctl函数以上是所有应⽤程序所能够做的所有操作,由此开始追踪spi 驱动程序的完整执⾏流程其中,最重要的就是ioctl, 从这⾥开始先重点剖析ioctl函数1 spidev_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)2 {3int err = 0;4int retval = 0;5struct spidev_data *spidev;6struct spi_device *spi;7 u32 tmp;8 unsigned n_ioc;9struct spi_ioc_transfer *ioc;10//ioctl cmd 检查11/* Check type and command number */12if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC)13return -ENOTTY;1415/* Check access direction once here; don't repeat below.16 * IOC_DIR is from the user perspective, while access_ok is17 * from the kernel perspective; so they look reversed.18*/19if (_IOC_DIR(cmd) & _IOC_READ)20 err = !access_ok(VERIFY_WRITE,21 (void __user *)arg, _IOC_SIZE(cmd));22if (err == 0 && _IOC_DIR(cmd) & _IOC_WRITE)23 err = !access_ok(VERIFY_READ,24 (void __user *)arg, _IOC_SIZE(cmd));25if (err)26return -EFAULT;2728/* guard against device removal before, or while,29 * we issue this ioctl.30*/31//通过以下⽅式获取spi_device-----spi(是之后操作的基础)32 spidev = filp->private_data;33 spin_lock_irq(&spidev->spi_lock);34 spi = spi_dev_get(spidev->spi);35 spin_unlock_irq(&spidev->spi_lock);3637if (spi == NULL)38return -ESHUTDOWN;3940/* use the buffer lock here for triple duty:41 * - prevent I/O (from us) so calling spi_setup() is safe;42 * - prevent concurrent SPI_IOC_WR_* from morphing43 * data fields while SPI_IOC_RD_* reads them;44 * - SPI_IOC_MESSAGE needs the buffer locked "normally".45*/46 mutex_lock(&spidev->buf_lock);47//以上是进⾏check,检查命令有效性,以及进⾏初始化数据,这⾥不在多做说明48switch (cmd) {49/* read requests */50case SPI_IOC_RD_MODE://获取模式信息,将信息发送给⽤户51 retval = __put_user(spi->mode & SPI_MODE_MASK,52 (__u8 __user *)arg);53break;54case SPI_IOC_RD_LSB_FIRST://获取spi最低有效位55 retval = __put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0,56 (__u8 __user *)arg);57break;58case SPI_IOC_RD_BITS_PER_WORD:59 retval = __put_user(spi->bits_per_word, (__u8 __user *)arg);61case SPI_IOC_RD_MAX_SPEED_HZ:62 retval = __put_user(spi->max_speed_hz, (__u32 __user *)arg);63break;6465/* write requests */66case SPI_IOC_WR_MODE://设置数据传输模式,这⾥只是把设置的数据保存在spi 中,但并没有对spi device做任何操作,对spi device的操作⼀并在最后进⾏ 67 retval = __get_user(tmp, (u8 __user *)arg);68if (retval == 0) {69 u8 save = spi->mode;7071if (tmp & ~SPI_MODE_MASK) {72 retval = -EINVAL;73break;74 }7576 tmp |= spi->mode & ~SPI_MODE_MASK;77 spi->mode = (u8)tmp;78 retval = spi_setup(spi);79if (retval < 0)80 spi->mode = save;81else82 dev_dbg(&spi->dev, "spi mode %02xn", tmp);83 }84break;85case SPI_IOC_WR_LSB_FIRST://设置设置spi写最低有效位,同上86 retval = __get_user(tmp, (__u8 __user *)arg);87if (retval == 0) {88 u8 save = spi->mode;8990if (tmp)91 spi->mode |= SPI_LSB_FIRST;92else93 spi->mode &= ~SPI_LSB_FIRST;94 retval = spi_setup(spi);95if (retval < 0)96 spi->mode = save;97else98 dev_dbg(&spi->dev, "%csb firstn",99 tmp ? 'l' : 'm');100 }101break;102case SPI_IOC_WR_BITS_PER_WORD://设置spi写每个字含多个个位,同上103 retval = __get_user(tmp, (__u8 __user *)arg);104if (retval == 0) {105 u8 save = spi->bits_per_word;106107 spi->bits_per_word = tmp;108 retval = spi_setup(spi);109if (retval < 0)110 spi->bits_per_word = save;111else112 dev_dbg(&spi->dev, "%d bits per wordn", tmp);113 }114break;115case SPI_IOC_WR_MAX_SPEED_HZ://设置spi写最⼤速率,同上116 retval = __get_user(tmp, (__u32 __user *)arg);117if (retval == 0) {118 u32 save = spi->max_speed_hz;119120 spi->max_speed_hz = tmp;121 retval = spi_setup(spi);122if (retval < 0)123 spi->max_speed_hz = save;124else125 dev_dbg(&spi->dev, "%d Hz (max)n", tmp);126 }127break;128129default:130/* segmented and/or full-duplex I/O request */131if (_IOC_NR(cmd) != _IOC_NR(SPI_IOC_MESSAGE(0))//查看是否为数据write命令132 || _IOC_DIR(cmd) != _IOC_WRITE) {133 retval = -ENOTTY;134break;135 }136//pay more time on understanding below method137 tmp = _IOC_SIZE(cmd);//从命令参数中解析出⽤户数据⼤⼩138if ((tmp % sizeof(struct spi_ioc_transfer)) != 0) {//数据⼤⼩必须是struct spi_ioc_transfer的整数倍139 retval = -EINVAL;140break;141 }142 n_ioc = tmp / sizeof(struct spi_ioc_transfer);//将要传输的数据分成n个传输数据段143if (n_ioc == 0)145146/* copy into scratch area */147 ioc = kmalloc(tmp, GFP_KERNEL);//获取n个数据段的数据管理结构体的内存空间148if (!ioc) {149 retval = -ENOMEM;150break;151 }152if (__copy_from_user(ioc, (void __user *)arg, tmp)) {//从⽤户空间获取数据管理结构体的初始化值153 kfree(ioc);154 retval = -EFAULT;155break;156 }157158/* translate to spi_message, execute */159 retval = spidev_message(spidev, ioc, n_ioc);//数据传输,这是整个流程中的核⼼160 kfree(ioc);161break;162 }163164 mutex_unlock(&spidev->buf_lock);165 spi_dev_put(spi);166return retval;167 }通过调⽤函数spi->master->setup()来设置SPI模式。
linux中编译驱动的方法

linux中编译驱动的方法
在Linux中编译驱动的方法通常涉及以下步骤:
1. 编写驱动代码:首先,您需要编写适用于Linux内核的驱动代码。
这通常是在内核源代码树之外编写的。
驱动代码通常以C语言编写,并遵循内核编程约定。
2. 获取内核源代码:为了编译驱动,您需要获得Linux内核的源代码。
您可以从Linux官方网站或镜像站点下载内核源代码。
3. 配置内核:在编译驱动之前,您需要配置内核以包含您的驱动。
这可以通过运行`make menuconfig`命令来完成。
在配置菜单中,您可以选择要编译的驱动以及相关的内核选项。
4. 编译驱动:一旦您配置了内核并选择了要编译的驱动,您可以使用`make`命令来编译驱动。
这将在内核源代码目录下生成可执行文件或模块文件。
5. 加载和测试驱动:一旦驱动被编译,您可以将其加载到Linux 内核中以进行测试。
您可以使用`insmod`命令将模块加载到内核,然后使用`dmesg`命令检查内核日志以查看驱动是否正确加载。
这些是基本的步骤,但具体的步骤可能会因您的环境和需求而有所不同。
在编译和加载驱动时,请确保您具有适当的权限和知识,因为这可能需要管理员权限,并且错误的操作可能会导致系统不稳定或损坏。
简述字符设备驱动开发流程
简述字符设备驱动开发流程
字符设备驱动是Linux 内核开发中常见的一种驱动类型,用于处理字符设备的操作。
下面按照流程来简述字符设备驱动的开发过程。
1. 设计驱动程序接口
首先需要确定驱动程序需要提供哪些接口,例如读写、打开关闭等操作。
这些接口需要定义在驱动程序的头文件中。
2. 实现设备驱动程序
根据接口定义,编写设备驱动程序的实现代码。
主要包括初始化、读写、打开关闭等操作。
3. 编写设备节点的创建和删除代码
在Linux 中,每个设备都会被映射到一个设备节点上。
因此,需要编写代码来创建和删除设备节点。
4. 注册设备驱动程序
将设备驱动程序注册到Linux 内核中,让内核能够找到并加载驱动程序。
5. 编译和安装设备驱动程序
将设备驱动程序编译成内核模块或以静态方式链接到内核中。
安装驱动程序。
6. 测试和调试
在实际运行中,需要对设备驱动程序进行测试和调试,确认其功能和稳定性。
以上是字符设备驱动的开发流程,需要安排合理的时间进行开发和测试。
良好的开发流程能够提高驱动程序的质量和稳定性。
Linux设备驱动开发详解-第6章字符设备驱动(一)-globalmem

Linux设备驱动开发详解-第6章字符设备驱动(⼀)-globalmem1 驱动程序设计之前奏 (2)1.1 应⽤程序、库、内核、驱动程序的关系 (2)1.2 设备类型 (2)1.3 设备⽂件 (2)1.4 主设备号和从设备号 (2)1.5 驱动程序与应⽤程序的区别 (3)1.6 ⽤户态与内核态 (3)1.7 Linux驱动程序功能 (3)2 字符设备驱动程序框架 (3)2.1 file_operations结构体 (4)2.2 驱动程序初始化和退出 (5)2.3 将驱动程序模块注册到内核 (5)2.4 应⽤字符设备驱动程序 (5)3 globalmem虚拟设备实例描述 (6)3.1 头⽂件、宏及设备结构体 (6)3.2 加载与卸载设备驱动 (6)3.3 读写函数 (8)3.4 seek()函数 (9)3.5 ioctl()函数 (10)3.6 globalmem完整实例 (12)4 测试应⽤程序 (17)4.1 应⽤程序接⼝函数 (17)4.2 应⽤程序 (18)5 实验步骤 (19)5.1 编译加载globalmem 模块 (19)5.2 编译测试应⽤程序 (20)6 扩展 (21)1 驱动程序设计之前奏㈠应⽤程序、库、内核、驱动程序的关系㈡设备类型㈢设备⽂件㈣主设备号与从设备号㈤驱动程序与应⽤程序的区别㈥⽤户态与内核态㈦Linux驱动程序功能1.1 应⽤程序、库、内核、驱动程序的关系■应⽤程序调⽤应⽤程序函数库完成功能■应⽤程序以⽂件形式访问各种资源■应⽤程序函数库部分函数直接完成功能部分函数通过系统调⽤由内核完成■内核处理系统调⽤,调⽤设备驱动程序■设备驱动直接与硬件通信1.2 设备类型■字符设备对字符设备发出读/写请求时,实际的硬件I/O操作⼀般紧接着发⽣■块设备块设备与之相反,它利⽤系统内存作为缓冲区■⽹络设备⽹络设备是⼀类特殊的设备,它不像字符设备或块设备那样通过对应的设备⽂件节点访问,也不能直接通过read或write进⾏数据访问请求1.3 设备⽂件■设备类型、主从设备号是内核与设备驱动程序通信时使⽤的■应⽤程序使⽤设备⽂件节点访问对应设备■每个主从设备号确定的设备都对应⼀个⽂件节点■每个设备⽂件都有其⽂件属性(c或者b)■每个设备⽂件都有2个设备号(后⾯详述)主设备号:⽤于标识驱动程序从设备号:⽤于标识同⼀驱动程序的不同硬件■设备⽂件的主设备号必须与设备驱动程序在登记时申请的主设备号⼀致■系统调⽤是内核与应⽤程序之间的接⼝■设备驱动程序是内核与硬件之间的接⼝1.4 主设备号和从设备号■在设备管理中,除了设备类型外,内核还需要⼀对被称为主从设备号的参数,才能唯⼀标识⼀个设备■主设备号相同的设备使⽤相同的驱动程序■从设备号⽤于区分具体设备的实例例:PC的IDE设备,主设备号⽤于标识该硬盘,从设备号⽤于标识每个分区■在/dev⽬录下使⽤ll命令(ls -l)可以查看各个设备的设备类型、主从设备号等■cat /proc/devices可以查看系统中所有设备对应的主设备号1.5 驱动程序与应⽤程序的区别■应⽤程序以main开始■驱动程序没有main,它以⼀个模块初始化函数作为⼊⼝■应⽤程序从头到尾执⾏⼀个任务■驱动程序完成初始化之后不再运⾏,等待系统调⽤■应⽤程序可以使⽤GLIBC等标准C函数库■驱动程序不能使⽤标准C库1.6 ⽤户态与内核态■驱动程序是内核的⼀部分,⼯作在内核态■应⽤程序⼯作在⽤户态■数据空间访问问题★⽆法通过指针直接将⼆者的数据地址进⾏传递★系统提供⼀系列函数帮助完成数据空间转换get_userput_usercopy_from_usercopy_to_user1.7 Linux驱动程序功能■对设备初始化和释放■把数据从内核传送到硬件和从硬件读取数据■读取应⽤程序传送给设备⽂件的数据和回送应⽤程序请求的数据■检测和处理设备出现的错误2 字符设备驱动程序框架①Linux各种设备驱动程序都是以模块的形式存在的,驱动程序同样遵循模块编程的各项原则②字符设备是最基本、最常⽤的设备,其本质就是将千差万别的各种硬件设备采⽤⼀个统⼀的接⼝封装起来,屏蔽了不同设备之间使⽤上的差异性,简化了应⽤层对硬件的操作③字符设备将各底层硬件设备封装成统⼀的结构体,并采⽤相同的函数操作,如下等:open/close/read/write/ioctl④添加⼀个字符设备驱动程序,实际上是给上述操作添加对应的代码⑤Linux对所有的硬件操作统⼀做以下抽象抽象file_operations结构体规定了驱动程序向应⽤程序提供的操作接⼝struct file_operations ext2_file_operations ={.llseek = generic_file_llseek,.read = generic_file_read,.write = generic_file_write,.aio_read = generic_file_aio_read,.aio_write = generic_file_aio_write,.ioctl = ext2_ioctl,.mmap = generic_file_mmap,.open = generic_file_open,.release = ext2_release_file,.fsync = ext2_sync_file,.readv = generic_file_readv,.writev = generic_file_writev,.sendfile = generic_file_sendfile,};⑥⽤户态与内核态数据的交互⽤户应⽤程序与驱动程序分属于不同的进程空间,因此⼆者之间的数据应当采⽤以下函数进⾏交换long copy_to_user(kernel_buffer, user_buffer,n)//从内核空间拷贝n字节数据到⽤户空间copy_from_user(kernel_buffer, user_buffer,n)//从⽤户空间拷贝n字节数据到内核空间put_user(kernel_value, user_buffer)//从内核空间拷贝⼀数据变量到⽤户空间get_user(kernel_value, user_buffer)//从⽤户空间拷贝⼀数据变量到内核空间(内核空间数据可是任意类型)2.1 file_operations结构体⑴write函数■从应⽤程序接收数据送到硬件ssize_t (*write)(struct file*, const char __user *, size_t, loff_t*);⑵read函数■从硬件读取数据并交给应⽤程序ssize_t (*read)(struct file *, char __user *, size_t, loff_t*); /// 从设备中同步读取数据⑶ioctl函数■为应⽤程序提供对硬件⾏为的相关配置int (*ioctl)(struct inode *, struct file *, unsigned int, unsigned long);⑷open函数■当应⽤程序打开设备时对设备进⾏初始化■使⽤MOD_INC_USE_COUNT增加驱动程序的使⽤次数,当模块使⽤次数不为0时,禁⽌卸载模块Int (*open)(struct inode *, struct file*);⑸release函数■当应⽤程序关闭设备时处理设备的关闭操作■使⽤MOD_DEC_USE_COUNT减少驱动程序的使⽤次数,配合open使⽤,来对模块使⽤次数进⾏计数int (*release)(struct inode *, struct file*);⑹⑻⑻⑼⑽2.2 驱动程序初始化和退出①驱动程序初始化函数■Linux在加载内核模块时会调⽤初始化函数■在初始化函数中⾸先进⾏资源申请等⼯作■使⽤register_chrdev向内核注册驱动程序②驱动程序退出函数■Linux在卸载内核模块时会调⽤退出函数■释放驱动程序使⽤的资源■使⽤unregister_chrdev从内核中卸载驱动程序2.3 将驱动程序模块注册到内核内核需要知道模块的初始化函数和退出函数,才能将模块放⼊⾃⼰的管理队列中①module_init()向内核声明当前模块的初始化函数②module_exit()向内核声明当前模块的退出函数2.4 应⽤字符设备驱动程序㈠加载驱动程序■insmod 内核模块⽂件名■cat /proc/devices 查看当前系统中所有设备驱动程序及其主设备号㈡⼿动建⽴设备⽂件■设备⽂件⼀般建⽴/dev⽬录下■mknod ⽂件路径c [主设备号] [从设备号]㈢应⽤程序接⼝函数■编写应⽤层测试程序■可以使⽤标准C的⽂件操作函数来完成①int open(const char *path, int oflag,…);★打开名为path的⽂件或设备★成功打开后返回⽂件句柄★常⽤oflag:O_RDONLY, O_WRONLY, O_RDWR②int close(int fd);★关闭之前被打开的⽂件或设备★成功关闭返回0,否则返回错误代号③ssize_t read(int fd, void *buffer, size_t count)★从已经打开的⽂件或设备中读取数据★buffer表⽰应⽤程序缓冲区★count表⽰应⽤程序希望读取的数据长度★成功读取后返回读取的字节数,否则返回-1④ssize_t write(int fd, void *buffer, size_t count);★向已经打开的⽂件或设备中写⼊数据★buffer表⽰应⽤程序缓冲区★count表⽰应⽤程序希望写⼊的数据长度★成功写⼊后返回写⼊的字节数,否则返回-1④int ioctl(int fd, unsigned int cmd, unsigned long arg);★向驱动程序发送控制命令★cmd:⽤来定义⽤户向驱动分配的命令例如G PF驱动中:设置指定管脚的⾼低电平、输⼊输出特性等为了规范化及错误检查常⽤_IO宏合成该命令:_IO(MAGIC, num) ★arg:配置命令参数配合cmd命令完成指定功能3 globalmem虚拟设备实例描述3.1 头⽂件、宏及设备结构体在globalmem字符设备驱动中,应包含它要使⽤的头⽂件,并定义globalmem设备结构体及相关宏。
实现一个嵌入式Linux设备驱动程序的大致流程如下
实现一个嵌入式Linux设备驱动程序的大致流程如下:(l)查看原理图,理解设备的工作原理。
(2)定义主设备号。
设备由一个主设备号和一个次设备号来标识。
主设备号唯一标识了设备类型,即设备驱动程序类型,它是块设备表或字符设备表中设备表项的索引。
次设备号仅由设备驱动程序解释,区分被一个设备驱动控制下的某个独立的设备。
alloc_chrdev_region 申请主设备号unregister_chrdev_region 释放主设备号(3)实现初始化函数。
在驱动程序中实现驱动的注册和卸载。
int register_chrdev 注册设备int unregister_chrdev 卸载设备(4)设计所要实现的文件操作,定义file--operations结构。
file_operations的主要成员:struct module *owner: 指向模块自身open:打开设备release:关闭设备read:从设备上读数据write:向设备上写数据ioctl:I/O控制函数llseek:定位读写指针mmap:映射设备空间到进程的地址空间(5)实现所需的文件操作调用,如read,write等。
(6)实现中断服务,并用request--irq向内核注册,中断并不是每个设备驱动所必需的。
(7)编译该驱动程序到内核中,或者用insmod命令加载模块。
(8)测试该设备,编写应用程序,对驱动程序进行测试。
典型字符设备驱动编写框架:1 编写硬件接口函数2 建立文件系统与设备驱动程序间的接口,如:struct file_operations结构体3 注册设备到chrdevfs全局数组中,注册或注销设备可以在任何时候,但一般在模块加载时注册设备,在模块退出时注销设备。
(module_init();module_exit ();)4 以模块方式编译驱动源码,并将其加载到内核中5 创建设备节点,mknode6 编写应用程序访问底层设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
---简介Linux下的MISC简单字符设备驱动虽然使用简单,但却不灵活。
只能建立主设备号为10的设备文件。
字符设备比较容易理解,同时也能够满足大多数简单的硬件设备,字符设备通过文件系统中的名字来读取。
这些名字就是文件系统中的特殊文件或者称为设备文件、文件系统的简单结点,一般位于/dev/目录下使用ls进行查看会显示以C开头证明这是字符设备文件crw--w---- 1 root tty 4, 0 4月 14 11:05 tty0。
第一个数字是主设备号,第二个数字是次设备号。
---分配和释放设备编号1)在建立字符设备驱动时首先要获取设备号,为此目的的必要的函数是register_chrdev_region,在linux/fs.h中声明:int register_chrdev_region(dev_t first, unsigned int count, char *name);first是你想要分配的起始设备编号,first的次编号通常是0,count是你请求的连续设备编号的总数。
count如果太大会溢出到下一个主设备号中。
name是设备的名字,他会出现在/proc/devices 和sysfs中。
操作成功返回0,如果失败会返回一个负的错误码。
2)如果明确知道设备号可用那么上一个方法可行,否则我们可以使用内核动态分配的设备号int alloc_chrdev_region(dev_t *dev, unsigned int firstminor,unsigned int count, char *name);dev是个只输出的参数,firstminor请求的第一个要用的次编号,count和name的作用如上1)对于新驱动,最好的方法是进行动态分配3)释放设备号,void unregister_chrdev_region(dev_t first unsigned int count);---文件操作file_operations结构体,内部连接了多个设备具体操作函数。
该变量内部的函数指针指向驱动程序中的具体操作,没有对应动作的指针设置为NULL。
1)fops的第一个成员是struct module *owner 通常都是设置成THIS_MODULE。
linux/module.h中定义的宏。
用来在他的操作还在被使用时阻止模块被卸载。
2)loff_t (*llseek) (struct file *, loff_t, int);该方法用以改变文件中的当前读/写位置返回新位置。
3)ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);该函数用以从设备文件中读取数据,读取成功返回读取的字节数。
4)ssize_t (*write) (struct file *, const char __user *,size_t , loff_t *);该函数用以向设备写入数据,如果成功返回写入的字节数。
5)int (*ioctl) (struct inode *, struct file *, unsigned int, unsigned long);ioctl系统调用提供发出设备特定命令的方法。
6)int (*open) (struct inode *, struct file *);设备文件进行的第一个操作,打开设备文件。
7)int (*release) (struct inode *, struct file *);释放文件结构函数指针。
一般初始化该结构体如下:struct file_operations fops = {.owner = THIS_MODULE, .llseek = xxx_llseek, .read = xxx_read, .write = xxx_write,.ioctl = xxx_ioctl, .open = xxx_open, .release = xxx_release };PS:以上的文件操作函数指针并不是全部,只是介绍了几个常用的操作。
---文件结构struct file定义在linux/fs.h中,是设备驱动中第二个最重要的数据结构,此处的file 和用户空间程序中的FILE指针没有关系。
前者位于内核空间,后者位于用户控件。
文件结构代表一个打开的文件。
(他不特定给设备驱动;系统中每个打开的文件有一个关联的struct file在内核空间)。
它由内核在open时创建,并可以传递给文件件操作函数,文件关闭之后,内核释放数据结构。
1)mode_t f_mode。
确定文件读写模式2)loff_t f_ops。
当前读写位置3)unsigned int f_flags 。
文件标志,O_RDONLY、O_NONBLOCK,4)struct file_operations *f_op。
关联文件相关操作5)void *private_data。
open系统调用设置该指针NULL,指向分配的数据。
6)struct dentry *f_dentry。
关联到文件的目录入口dentry结构。
---inode结构inode结构由内核在内部用来表示文件。
它和代表打开文件描述符的文件结构是不同的。
inode结构包含大量关于文件的信息。
作为通用规则,这个结构只有两个成员对驱动代码有作用。
dev_t i_rdev。
对于代表设备文件的节点,这个成员包含实际的设备编号。
struct cdev *i_cdev。
内核内部结构,代表字符设备。
---字符设备注册在内核调用你的设备操作前,你编写分配并注册一个或几个struct cdev.struct cdev *my_cdev = cdev_alloc(); my_cdev-;ops = &my_fops;或者定义成static均可。
对定义的cdev变量进行初始化,可以使用专门的函数,或者使用如上的方法。
cdev_init( my_cdev, &my_fops); 其实上边的两行代码就是做了这个函数的工作。
最后告诉内核该cdev。
cdev_add(struct cdev *dev, dev_t num, unsigned int count);/*上述总结,到此关于设备文件相关的结构数据以及如何注册销毁等操作相关的函数基本上都已经介绍完毕。
主要的还是要设计具体操作的函数来实现具体的逻辑操作*/以下代码整理、摘录自《Android深度探索HAL与驱动开发-李宁》LED驱动篇#include#include#include#include#include#include#include#deifne DEVICE_NAME s3c6410_leds#define DEVICE_COUNT 1#define S3C6410_LEDS_MAJOR 0#define S3C6410_LEDS_MINOR 234#define PARAM_SIZE 3static int major = S3C6410_LEDS_MAJOR;static int minor = S3C6410_LEDS_MINOR;static dev_t dev_number;static int leds_state = 1;static char *params[] = {string1,string2,string3};static iint param_size = PARAM_SIZE;static struct class *leds_class = NULL;static int s3c6410_leds_ioctl (struct file *file, unsigned int cmd, unsigned long arg){switch (cmd){unsigned tmp;case 0:case 1:if (arg ; 4)return -EINVAL;tmp = ioread32 (S3C64XX_GPMDAT);if (cmd == 1)tmp &= (~(1 << arg));elsetmp |= (1 << arg);iowrite32 (tmp, S3C64XX_GPMDAT);return 0;default : return -EINVAL;}}static ssize_t s3c6410_leds_write (struct file *file, const char __user *buf, size_t count, loff_t *ppos){unsigned tmp = count;unsigned long i = 0;memset(mem, 0, 4);if (count ; 4)tmp = 4;if (copy_from_user (mem, buf, tmp) )return -EFAULT;else{for( i=0; i<4; i++){tmp = ioread32(S3C64XX_GPMDAT);if (mem[i] == '1')tmp &= (~(1 << i));elsetmp |= (1 << i);iowrite32(tmp, S3C64XX_GPMDAT);}return count;}}static struct file_operations dev_fops ={.owner = THIS_MODULE, .unlocked_ioctl = s3c6410_leds_ioctl, .write = s3c6410_leds_write};static struct cdev leds_cdev;static int leds_create_device(void){int ret = 0;int err = 0;cdev_init (&leds_cdev, &dev_fops);leds_cdev.owner = THIS_MODULE;if (major ; 0){dev_number = MKDEV(major,minor);err = register_chrdev_region(dev_number, DEVICE_COUNT, DEVICE_NAME);if (err < 0){printk(KERN_WANRING register_chrdev_region errorn);return err}}else{err = alloc_chrdev_region(&leds_cdev.dev, 10, DEVICE_COUNT, DEVICE_NAME); if(err < 0){printk (KERN_WARNING alloc_chrdev_region errorn);return err;}major = MAJOR(leds_cdev.dev);major = MINOR(leds_cdev.dev);dev_number = leds_cdev.dev;}ret = cdev_add(&leds_cdev,dev_number, DEVICE_COUNT);leds_class = class_create (THIS_MODULE, DEVICE_NAME);device_create (leds_class, NULL, dev_number, NULL, DEVICE_NAME); return ret;}static void leds_init_gpm(int leds_default){int tmp = 0;tmp = ioread32(S3C64XX_GPMCON);tmp &= (~0xffff);tmp |= 0x1111;iowrite32(tmp,S3C64XX_GPMCON);tmp = ioread32(S3C64XX_GPMPUD);tmp &= (~0XFF);tmp |= 0xaa;iowrite32(tmp,S3C64XX_GPMPUD);tmp = ioread32(S3C64XX_GPMDAT);tmp &= (~0xf);tmp |= leds_default;iowrite32(tmp, S3C64XX_GPMDAT);}static leds_init( void){int ret;ret = leds_create_device();leds_init_gpm (~leds_state);printk(DEVICE_NAMEtinitializedn);return ret;}static void leds_destroy_device(void){device_destroy(leds_class, dev_number);if(leds_class)class_destroy(leds_class);unregister_chrdev_region(dev_number, DEVICE_NAME); }static void leds_exit(void){leds_destroy_device();printk(DEVICE_NAMEtexitn);}module_init(leds_init);module_exit(leds_exit);module_param(leds_state, int, S_IRUGO|S_IWUSR);module_param_array(params, charp, ?m_size, S_IRUGO|S_IWUSR); MODULE_LICENSE(GPL);MODULE_AUTHOR(lining);。