台达人机介绍PPT
合集下载
台达人机界面资料
℃ -20℃-60℃ 10%-90% RH【0-40℃】 ,10%-55% RH【41-50℃】 ,污染等级 2 IEC6113-2 规定 不连续振动 5HZ-9 HZ 3.5mm,9 HZ-15 HZ 1G 连续振动 5HZ-9 HZ,1.75 mm ,9 HZ-150 HZ 0.5G X、Y、Z 各方向 10 次 184×144×51.1 172.4×132.4
YD-EMS 自动抄表及用电分析系统技术方案
(W)×(H)
a) 接线与安装
附件 1:台达人机界面详细资料
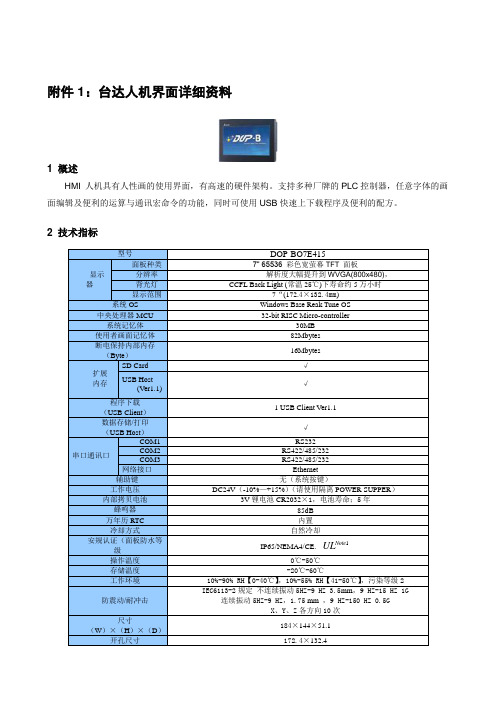
1 概述
HMI 人机具有人性画的使用界面,有高速的硬件架构。支持多种厂牌的 PLC 控制器,任意字体的画 面编辑及便利的运算与通讯宏命令的功能,同时可使用 USB 快速上下载程序及便利的配方。
2 技术指标
型号 面板种类 分辨率 显示 器 背光灯 显示范围 系统 OS 中央处理器 MCU 系统记忆体 使用者画面记忆体 断电保持内部内存 (Byte) SD Card 扩展 USB Host 内存 (Ver1.1) 程序下载 (USB Client) 数据存储/打印 (USB Host) COM1 COM2 串口通讯口 COM3 网络接口 辅助键 工作电压 内部拷贝电池 蜂鸣器 万年历 RTC 冷却方式 安规认证(面板防水等 级 操作温度 存储温度 工作环境 防震动/耐冲击 尺寸 (W)×(H)×(D) 开孔尺寸
DOP-BO7E415
7” 65536 彩色宽萤幕 TFT 面板 解析度大幅提升到 WVGA(800x480), CCFL Back Light (常温 25℃)下寿命约 5 万小时 7“(172.4×132.4mm) Windows Base Reak Tune OS 32-bit RISC Micro-controller 30MB 82Mbytes 16Mbytes √ √ 1 USB Client Ver1.1 √ RS232 RS422/485/232 RS422/485/232 Ethernet 无(系统按键) DC24V(-10%—+15%) (请使用隔离 POWER SUPPER) 3V 锂电池 CR2032×1,电池寿命;5 年 85dB 内置 自然冷却 IP65/NEMA4/CE.
YD-EMS 自动抄表及用电分析系统技术方案
(W)×(H)
a) 接线与安装
附件 1:台达人机界面详细资料
1 概述
HMI 人机具有人性画的使用界面,有高速的硬件架构。支持多种厂牌的 PLC 控制器,任意字体的画 面编辑及便利的运算与通讯宏命令的功能,同时可使用 USB 快速上下载程序及便利的配方。
2 技术指标
型号 面板种类 分辨率 显示 器 背光灯 显示范围 系统 OS 中央处理器 MCU 系统记忆体 使用者画面记忆体 断电保持内部内存 (Byte) SD Card 扩展 USB Host 内存 (Ver1.1) 程序下载 (USB Client) 数据存储/打印 (USB Host) COM1 COM2 串口通讯口 COM3 网络接口 辅助键 工作电压 内部拷贝电池 蜂鸣器 万年历 RTC 冷却方式 安规认证(面板防水等 级 操作温度 存储温度 工作环境 防震动/耐冲击 尺寸 (W)×(H)×(D) 开孔尺寸
DOP-BO7E415
7” 65536 彩色宽萤幕 TFT 面板 解析度大幅提升到 WVGA(800x480), CCFL Back Light (常温 25℃)下寿命约 5 万小时 7“(172.4×132.4mm) Windows Base Reak Tune OS 32-bit RISC Micro-controller 30MB 82Mbytes 16Mbytes √ √ 1 USB Client Ver1.1 √ RS232 RS422/485/232 RS422/485/232 Ethernet 无(系统按键) DC24V(-10%—+15%) (请使用隔离 POWER SUPPER) 3V 锂电池 CR2032×1,电池寿命;5 年 85dB 内置 自然冷却 IP65/NEMA4/CE.
人机功能分配ppt课件
最新版整理ppt
3
二、机的主要功能
• (一)接受信息 • 如电子、光学或机械的传感装置来完成。 • (二)储存信息
• 一般要靠磁盘、磁带、磁鼓、打孔卡、凸轮、模 板等储存系统来储存信息。
• (三)处理信息 • (四)执行功能
• 一是机器本身产生控制作用,如车床自动加深或 减少铣削深度,二是借助于声、光等信号把指令 从这个环节输送到另一个环节。
可存储大量信息,并进行多种途径 的存取,擅长于对原则和策略的记 忆
最新版整理ppt
8
四、人机的功能分配1、人来自功能分配的含义• 对人和机的特性进行权衡分析,将系统的不 同功能恰当地分配给人或机,称为人机的功 能分配。
• 人与机器的结合形式,依复杂程度不同可分 为:劳动者-工具;操作者-机器;监控者-自动 化机器;监督者-智能机器等几种。
最新版整理ppt
4
三、人机特性比较
• 在人机系统设计中,首先要按照科学的观点分 析人和机器各自所具有的不同特点,以便研究 人与机器的功能分配,从而扬长避短,各尽所 长,充分发挥人与机器的各自优点;从设计开 始就尽量防止产生人的不安全行动和机器的不 安全状态,做到安全生产。
• 人和机各有自己的能力和长处,归纳起来各表 现在四个方面:
最新版整理ppt
7
表4—1 人与机的优缺点比较(续)
项目
机器
人
功率输 出
恒定——不论大的,固定的 或标准的
1471KW的功率输出只能维持10s, 367.75KW 的 功 率 输 出 可 维 持 几 分 钟,150KW以下的功率输出能持续 一天
综合能 力
记忆
多种途径
最适用于文字的再现和长期 存储
单一手段
台达DOP触摸屏培训资料
1、DOP-B的画面制作与保存
打开软件
演示例程:
建立新项目
制作画面
编译、保存
28
DOP-B 基本操作 2、从上位机下传画面数据到人机 3、DOP-B与PLC 的通讯建立 4、画面显示及测试
29
DOP - B
①
②③
B系列人机
④⑤
⑥
版本码
分辨率: 1: QVGA 2:WQVGA
机种 S: 标准型 E: 网络型
面板尺寸 05: 5.6寸显示器07:7 寸显示器
13
DOP-B屏硬件构成
DOP系列选型要点:
z屏幕有效显示区大小及分辨率 z显示颜色 z通讯口种类,以太网端口,是否支持打印 z画面存储容量
第五讲 DOP-B的功能介绍
30
DOP-B 的功能介绍 DOP-B系统内存使用
31
HP LaserJet 1022N ZEBRA TLP2844
23
DOP-B画面编辑软件-Screen Editor 模块参数设置说明
警报元件等滚动条 宽度调整
24
可配合不同机型轻松转换尺寸不同的画面程屏幕尺寸57寸101寸12寸15寸b系列产品分布示意图omwwwdeltagreentechcomcn台达人机产品介绍screeneditor编辑软件com3com3串行通讯smcardyesyesusbhost7sys6sys按键512k512ksram7m7mflashmemory65536色65536色面板颜色640480640480分辨率104尺寸a系列产品介绍omwwwdeltagreentechcomcn台达人机产品介绍screeneditor编辑软件com3com3com3串行通讯yesyesyesusbhost4sys4sys4sys按键128k128k128ksram1m1m2mflashmemory8灰阶蓝白8灰阶蓝白65536色面板颜色320240320240320240分辨率573835尺寸as系列产品介绍omwwwdeltagreentechcomcn台达人机产品介绍screeneditor编辑软件com3com3串行通讯smcardyesyesusbhost7sys6sys按键512k512ksram7m7mflashmemory65536色65536色面板颜色640480640480分辨率104尺寸ae系列产品介绍omwwwdeltagreentechcomcn台达人机产品介绍编辑软件网络接口串行通讯记忆卡usbhost按键sramflashmemory面板颜色分辨率尺寸128k3m6m65536色32023456b05sscreeneditoryescom3com3com3com3sd卡sd卡sd卡yseyesyesyes44sys16m16m16m256k82m82m82m3m65536色65536色65536色65536色10246001024600800600480234101101b10eb10sb07eb07sb系列产品介绍omwwwdeltagreentechcomcn第二讲dopb硬件结构及系统菜单10omwwwdeltagreentechcomcndopb屏硬件构成三个指示灯11omwwwdeltagreentechcomcndopb屏硬件构成完美的机身集成接口com1rs232com2rs232422485com3rs232422485batterysdcardaudiooutputusbclientusbhostethern
《delta机器人》课件

了解Delta机器人的运动规划和动作生成算法
应用案例
制造业
展示Delta机器人在制造业中的 成功应用案例
医疗保健领域
探讨Delta机器人在医疗领域的 创新应用案例
军事领域
研究Delta机器人在军事领域中 的关键应用案例
展望
1 未来发展趋势
展示Delta机器人未来的发展趋势和前景
2 挑战和风险
分析Delta机器人可能面临的挑战和风险
Delta机器人的运动学模型
了解Delta机器人的数学模型和运 动方程
Delta机器人的运动学控制 策略
探讨Delta机器人的运动控制方法 和策略
算法
Delta机器人的控制算法
介绍Delta机器人常用的控制算法和技术
Delta机器人的轨迹规划算法
学习Delta机器人的轨迹规划和路径生成方法
Delta机器人的运动规划算法
Delta机器人控制系统的 组成
详细介绍Da机器人控制系统的 原理
揭示Delta机器人控制系统的 工作原理和技术
Delta机器人控制系统的 优点和缺点
分析Delta机器人控制系统的 优势和限制
运动学
Delta机器人运动学
学习Delta机器人的运动学原理和 计算方法
《Delta机器人》PPT课件
Delta机器人是一种高速、高精度的平行连杆机器人,被广泛应用于工厂自动 化领域。本PPT课件将详细介绍Delta机器人的结构、控制系统、运动学、算法 和应用案例等内容。
简介
Delta机器人概述
了解Delta机器人的基本概念和特点
Delta机器人的应用领域
了解Delta机器人广泛应用于哪些行业
3 未来应用领域的展望
应用案例
制造业
展示Delta机器人在制造业中的 成功应用案例
医疗保健领域
探讨Delta机器人在医疗领域的 创新应用案例
军事领域
研究Delta机器人在军事领域中 的关键应用案例
展望
1 未来发展趋势
展示Delta机器人未来的发展趋势和前景
2 挑战和风险
分析Delta机器人可能面临的挑战和风险
Delta机器人的运动学模型
了解Delta机器人的数学模型和运 动方程
Delta机器人的运动学控制 策略
探讨Delta机器人的运动控制方法 和策略
算法
Delta机器人的控制算法
介绍Delta机器人常用的控制算法和技术
Delta机器人的轨迹规划算法
学习Delta机器人的轨迹规划和路径生成方法
Delta机器人的运动规划算法
Delta机器人控制系统的 组成
详细介绍Da机器人控制系统的 原理
揭示Delta机器人控制系统的 工作原理和技术
Delta机器人控制系统的 优点和缺点
分析Delta机器人控制系统的 优势和限制
运动学
Delta机器人运动学
学习Delta机器人的运动学原理和 计算方法
《Delta机器人》PPT课件
Delta机器人是一种高速、高精度的平行连杆机器人,被广泛应用于工厂自动 化领域。本PPT课件将详细介绍Delta机器人的结构、控制系统、运动学、算法 和应用案例等内容。
简介
Delta机器人概述
了解Delta机器人的基本概念和特点
Delta机器人的应用领域
了解Delta机器人广泛应用于哪些行业
3 未来应用领域的展望
台达人机界面B系列新产品介绍

B系列产品规格
B05S 记忆卡 N/A B07S N/A B07E SD卡 B10S B10E
SD卡 (支援 SDHC)
COM*3
SD卡 (支援 SDHC)
COM*3
串行通讯 音频输出Leabharlann COM*3COM*3
COM*3
蜂鸣器 网络接口 编辑软件 N/A
蜂鸣器 N/A
蜂鸣器 YES
蜂鸣器 N/A
Stereo output
480×234
7″LCD
480×234
10.1″LCD
1024×600
10.1″LCD
1024×600
面板颜色
65536色
65536色
65536色
65536色
LED Back Light (常溫25oC下半衰 期>1萬小時)
65536色
LED Back Light (常溫25oC下半衰 期>1萬小時)
应用领域:
工厂自动化:用于计算产能、记录合格率等生产数据。尤其是有生产线且厂內 自有设备研发单位的客戶。 楼宇自动化:用于记录空调运转数据、耗电监控等
B系列新功能介绍
例子:如何使用eServer每隔一秒取样HMI的$3、$6暂存器数据 DOP屏设置以太网络参数 启动eServer中的采样精灵,建立新节点 编辑excel表单 设定取样暂存器位置 取样条件 完成
B系列新功能介绍
可以利用以前用来记 录的时间去做别的事 情
B系列通信功能介绍
目前台达提供以下几种方式与不同的控制器通信
使用不同厂家的自身通信协议 台达触摸屏将不同厂家协议写成驱动集成在Screen Editor软件 中。 使用开放的协议(通过宏通信指令) 台达DOP使用的开放协议MODBUS,通过通信宏指令进行数 据交换。
台达人机界面培训资料
人机功能介绍(四)
通过IMRCP16/EXRCP16将配方以CSV文件格式汇入/汇出 到U盘
新建画面-制作 Export(输出)以及 Import(输入)按 钮,并编辑ON宏
FILLASC将配方名 称转化为ASCII数 值存放在$100
25
MODBUS主从
MODBUS主从
MODBUS
32
人机功能介绍(六)
通讯宏指令讲解: INITCOM PUTCHARS GETCHARS SELECTOM STATIONON STATIONOFF
台达人机界面培训资料
人机界面产品开发处
1
第一讲
DOP-B系列人机产品介绍
2
DOP-B系列触摸屏
屏幕 尺寸 15 ″ 12 ″ 10.1 ″ 8″ 功能
上市年份:2011
4、提供SD与USD两种插槽,扩展 数据存储更便捷
应用行业:纺织,电子,机床,药机,食品,包装,电力,印刷,木 工,工厂自动化,产线数据监控与采集,SI项目
6
DOP-B08S/E515
1、集成以太网与音频输出 2、eRemote与eServer软件支持, 远程监控与数据采集轻松实现 3、“多屏一机”功能,连接方便 ,高速,简便 4、通讯端口隔离设计,现场抗干 扰能力更强
第二讲
人机功能介绍(四) --配方
18
人机功能介绍(四)
配方功能说明
满足用户有大批数值参数需要设臵的需求而存放在人机内部存储器区
面包加工配料表
A
B
C
水
糖
2.5L
二两
3L
《delta机器人》课件
总结词
提高植保效果
详细描述
Delta机器人的精准施药和自动化作业能够 显著提高植保效果,促进农作物健康生长, 提高农业产量。
04
Delta机器人的挑战与未来展望
技术挑战
硬件限制
Delta机器人需要高精度的硬件设备,包括电机、减速器、传感器等,以确保其稳定性和精度。然而,这些硬件设备 的制造和维护成本较高,且容易受到磨损和损坏。
。同时,通过仿真软件可以对机器人的运动进行模拟,以便在实际应用
前进行验证和优化。
感知与决策
感知系统
感知系统是机器人感知外部环境的关键部分。通过传感器 和图像处理技术,感知系统可以获取机器人周围的环境信 息,如障碍物、目标物体等的位置和姿态。
决策算法
决策算法负责根据感知系统获取的信息和机器人的任务需 求,制定出最优的行动方案。常见的决策算法包括路径规 划、任务调度和避障算法等。
《Delta机器人》PPT课件
• Delta机器人简介 • Delta机器人技术解析 • Delta机器人案例展示 • Delta机器人的挑战与未来展望 • Delta机器人的实践与实验
01
Delta机器人简介
Delta机器人定义
01
Delta机器人是一种并联机器人, 其结构由三条相同的支链组成, 每条支链由一个伺服电机驱动。
应用挑战
任务复杂度
Delta机器人在实际应用中需要 完成的任务越来越复杂,包括装 配、包装、检测等。这些任务需 要机器人具备更高的灵活性和适
应性。
人机交互
Delta机器人在应用中需要与人 进行交互,包括安全防护、协同 作业等。如何实现安全、高效的
人机交互是一个重要的挑战。
维护与修复
由于Delta机器人通常在严苛的 环境中工作,其维护和修复工作 十分重要。然而,现有的维护和 修复技术仍有待提高,以满足实
提高植保效果
详细描述
Delta机器人的精准施药和自动化作业能够 显著提高植保效果,促进农作物健康生长, 提高农业产量。
04
Delta机器人的挑战与未来展望
技术挑战
硬件限制
Delta机器人需要高精度的硬件设备,包括电机、减速器、传感器等,以确保其稳定性和精度。然而,这些硬件设备 的制造和维护成本较高,且容易受到磨损和损坏。
。同时,通过仿真软件可以对机器人的运动进行模拟,以便在实际应用
前进行验证和优化。
感知与决策
感知系统
感知系统是机器人感知外部环境的关键部分。通过传感器 和图像处理技术,感知系统可以获取机器人周围的环境信 息,如障碍物、目标物体等的位置和姿态。
决策算法
决策算法负责根据感知系统获取的信息和机器人的任务需 求,制定出最优的行动方案。常见的决策算法包括路径规 划、任务调度和避障算法等。
《Delta机器人》PPT课件
• Delta机器人简介 • Delta机器人技术解析 • Delta机器人案例展示 • Delta机器人的挑战与未来展望 • Delta机器人的实践与实验
01
Delta机器人简介
Delta机器人定义
01
Delta机器人是一种并联机器人, 其结构由三条相同的支链组成, 每条支链由一个伺服电机驱动。
应用挑战
任务复杂度
Delta机器人在实际应用中需要 完成的任务越来越复杂,包括装 配、包装、检测等。这些任务需 要机器人具备更高的灵活性和适
应性。
人机交互
Delta机器人在应用中需要与人 进行交互,包括安全防护、协同 作业等。如何实现安全、高效的
人机交互是一个重要的挑战。
维护与修复
由于Delta机器人通常在严苛的 环境中工作,其维护和修复工作 十分重要。然而,现有的维护和 修复技术仍有待提高,以满足实
Delta机器人毕业论ppt课件
保存现场
处理中断异 bl do_irq
分辨中断
按键中断,调用 ent0~3()
按键调节 PWM
发生 中断
UART 中断,调用 do_uart_irq()
UART 发送数据
结束
第四章
1.机械部分
图 4.1 静平台
以上部分均为250×250×10mm 透明亚克力板切割而来。
图 4.2 动平台 图 4.3 自动杆
第四章
5.坐标反解
为方便求解三自在度平 台的空间位置关系,研讨平台 的运动规律,将机构进展简化。 得右图所示。
第五章
1.电控箱
电控箱中包含:电压转换电路、步进电机驱动、 5V3A开关电源、24V10A开关电源
第五章
2.Delta机器人整体展现
第五章
3.OK6410开发板
第五章
4.视频展现
谢 谢!
第四章
2.步进电机及驱动器
思索到大小与驱动功率的限制,本次设计选用 42BYGH403二相步进电机。
驱动器采用HST3525: 供电电压AC12-36V或DC12-24V 驱动电流0.3-2.0A 细分精度1-128细分可选 光隔离信号输入 电机噪声优化功能 可驱动任何2.0A相电流以下两相、四相混合式步进电机 20KHz斩波频率
第四章
3.系统总体电路衔接
第四章
4.电压转换
S3C6410的I/O 输出高电平为 3.3V为 了可以驱动HST3525,需用3.3V转5V转 换电路,其实现如下图当GPC0的输出是0的 时候输出会被拉成5V左右当GPC0的输出时 3.3V时由于三极管导通此时输出被拉低成 0,因此在给出GPC的输出时还要留意将电 平进展反转。
S3C6410的启动代码 的作用为硬件的初始化及 调用C函数。硬件初始化 流程如下图。
处理中断异 bl do_irq
分辨中断
按键中断,调用 ent0~3()
按键调节 PWM
发生 中断
UART 中断,调用 do_uart_irq()
UART 发送数据
结束
第四章
1.机械部分
图 4.1 静平台
以上部分均为250×250×10mm 透明亚克力板切割而来。
图 4.2 动平台 图 4.3 自动杆
第四章
5.坐标反解
为方便求解三自在度平 台的空间位置关系,研讨平台 的运动规律,将机构进展简化。 得右图所示。
第五章
1.电控箱
电控箱中包含:电压转换电路、步进电机驱动、 5V3A开关电源、24V10A开关电源
第五章
2.Delta机器人整体展现
第五章
3.OK6410开发板
第五章
4.视频展现
谢 谢!
第四章
2.步进电机及驱动器
思索到大小与驱动功率的限制,本次设计选用 42BYGH403二相步进电机。
驱动器采用HST3525: 供电电压AC12-36V或DC12-24V 驱动电流0.3-2.0A 细分精度1-128细分可选 光隔离信号输入 电机噪声优化功能 可驱动任何2.0A相电流以下两相、四相混合式步进电机 20KHz斩波频率
第四章
3.系统总体电路衔接
第四章
4.电压转换
S3C6410的I/O 输出高电平为 3.3V为 了可以驱动HST3525,需用3.3V转5V转 换电路,其实现如下图当GPC0的输出是0的 时候输出会被拉成5V左右当GPC0的输出时 3.3V时由于三极管导通此时输出被拉低成 0,因此在给出GPC的输出时还要留意将电 平进展反转。
S3C6410的启动代码 的作用为硬件的初始化及 调用C函数。硬件初始化 流程如下图。
《电气自动化技术实训》模块九台达人机编辑软件-PPT文档资料

昌吉职业技术学院电气工程系
四、实训步骤
v
v
1、软组件分配及系统接线图 触摸屏软组件分配 M0.0—顺启动控制 M0.1—逆停止控制 M0.2—急停 S7-200PLC软组件分配 Q0.0—KM1 Q0.1—KM2 Q0.2—KM3
昌吉职业技术学院电气工程系
(3)系统硬件接线图
主回路
昌吉职业技术学院电气工程系
昌吉职业技术学院电气工程系
实训项目一 触摸屏控制三台电动机顺序启动 逆序停止
一、实训目的 v 了解触摸屏相关知识,掌握触摸屏的简单应用; v 熟悉Screen Editor编辑软件的使用,掌握图形、 组件的操作及属性设置; v 掌握PLC和触摸屏相关联的程序编制; v 掌握计算机与触摸屏的接线方法; v 掌握PLC与触摸屏的接线方法。
昌吉职业技术学院电气工程系
4、直接按下”安装”键,Screen Editor 将自行安 装完成
昌吉职业技术学院电气工程系
5、安装完成后,系统会跳出窗口安装HMI USB 驱动 程序,点选继续安装即可
昌吉职业技术学院电气工程系
二、新建一个人机界面
1. 点选Window 窗口中的Screen Editor 1.05.XX 图示, 即可执行Screen Editor
昌吉职业技术学院电气工程系
v
通信设置 触摸屏的画面设计完成后,单击“选项” 菜单栏中的“设置模块参数”,进行设置。如 图所示:
昌吉职业技术学院电气工程系
以上设置完后,点击“通讯”,设置如下:
昌吉职业技术学院电气工程系
设置完成后,点击确定,返回到编辑画面,然后单 击编译 ,编译成功。如图:
昌吉职业技术学院电气工程系
昌吉职业技术学院电气工程系
DOP-B 系列人机界面 说明书

3.1 安装与升级 Screen Editor ............................................................................ 3-1 3.2 执行 Screen Editor 与视窗功能说明 ............................................................. 3-12 3.3 人机内部寄存器说明 .................................................................................... 3-19 3.4 控制区及状态区说明 .................................................................................... 3-25 3.5 功能菜单—文件............................................................................................ 3-41 3.6 功能菜单—编辑............................................................................................ 3-41 3.7 功能菜单—查看............................................................................................ 3-57 3.8 功能菜单—元件............................................................................................ 3-73 3.9 功能菜单—画面............................................................................................ 3-165 3.10 功能菜单—工具............................................................................................ 3-175 3.11 功能菜单—选项............................................................................................ 3-184 3.12 功能菜单—窗口............................................................................................ 3-217 3.13 功能菜单—帮助............................................................................................ 3-220 3.14 宏功能说明................................................................................................... 3-221
delta机器人PPT课件
.
7
五 机器人运动轨迹
Delta机器人基本的运动轨迹如下图,由S1、S2、S3构 成门字形的三部分轨迹组成,分别为拾取、平移、放置 三个阶段。 Delta机器人进行抓取目标工件时主要以走门字形运动轨 迹,也可根据不同的应用要求,规划不同的运动轨迹。
.
8
六 产品用途
各类食品包装生产线 药品分拣、收集 电子行业:电路板焊接 轻质产品的包装及加工装配
Delta机器人
上海理工大学 2014.12.11
.
1
一、Delta机器人概述
Delta机器人属于高速、轻载的并联机器人, 一般通过示教编程或视觉系统捕捉目标物体,由三 个并联的伺服轴确定抓具中心(TCP)的空间位置, 实现目标物体的运输,加工等操作。
Delta机器人主要应用于食品、药品和电子产 品等加工、装配。Delta机器人以其重量轻、体积 小、运动速度快、定位精确、成本低、效率高等特 点,正在市场上被广泛应用。
.
9
.
2
二 Delta机器人特点
Delta机器人是典型的空间三自由度并联机构, 整体结构精密、紧凑,驱动部分均布于固定平台,这 些特点使它具有如下特性:
承载能力强、刚度大、自重负荷比小、动态性能 好。
并行三自由度机械臂结构,重复定位精度高。 超高速拾取人应用系统
Delta机器人应用系统主要由三个部分组成: 机器人、输送线及机器人安装框架。其布局如下 图。
.
4
1 机器人 机器人由基板、电机罩、 旋转轴、主机械臂、副机 械臂、抓具中心等组成, 如下图所示。
.
5
2 输送线 机器人配套输送线采用电机输送带方式,通过机器人 视觉系统定位与输送线编码器反馈位置的方式,实现 机器人对目标工件的位置、姿态识别和准确抓取。根 据节拍与现场需要,可并行多条输送线同时操作。
台达初级培训-基础教程(ppt)

例:K1Y0、K2M10。 K1代表一个4 bits的组合,K2~K4分别代表8、12、16 bits的组合。
MOV H6A K2M10
○ ●●○
● ○● ○
M17 M16 M15 M14 M13 M12 M11 M10
• 输入X输出Y接点(8进制编号) 对主机而言,输入及输出的编号固定从X0及Y0 开始算,编号的多少跟随主机点数大小而变化。 对扩展IO模块而言,输入及输出的编号是与主机 的连接顺序来推算出。
• 辅助继电器 M(10进制编号)
辅助继电器的功能 辅助继电器M与输出继电器Y一样有输出线圈和A、 B接点,而且在程序中使用次数无限制。使用者 可以利用辅助继电器M来组合控制回路,但无法 直接驱动外部负载。
M1000~M1999不可随意使用。
• 定时器 T(以10进制编号)
定时器是以1ms、10ms、100ms为一个计时单位, 计时方式采用上数计时,当计时器现在值=设定值 时,输出线圈导通。设定值为10进制K值,也可使 用资料暂存器D当设定值。 定时器实际设定时间=计时单位*设定值
台达初级培训-基础 教程(ppt)
台达初级培训-基础教程
培训内容
1. PLC基础知识简介 2. DELTA PLC基础介绍 3. 特D、特M介绍 4. WPLSoft编程软件介绍 5. WPL基本指令与应用指令介绍
• 1、PLC基础知识简介
PLC基础知识简介
什么是PLC
PLC — Programmable Logic Controller 可编程逻辑控制器
• 输入接点X的功能 输入接点X与输入装置连接,读取输入信号进PLC。 每一个输入接点X的A或B接点在程序中使用次数没 有使用限制。输入接点X之On/Off只会跟随输入装 置的On/Off做变化,不可使用周边装置来强制输入 接点。
MOV H6A K2M10
○ ●●○
● ○● ○
M17 M16 M15 M14 M13 M12 M11 M10
• 输入X输出Y接点(8进制编号) 对主机而言,输入及输出的编号固定从X0及Y0 开始算,编号的多少跟随主机点数大小而变化。 对扩展IO模块而言,输入及输出的编号是与主机 的连接顺序来推算出。
• 辅助继电器 M(10进制编号)
辅助继电器的功能 辅助继电器M与输出继电器Y一样有输出线圈和A、 B接点,而且在程序中使用次数无限制。使用者 可以利用辅助继电器M来组合控制回路,但无法 直接驱动外部负载。
M1000~M1999不可随意使用。
• 定时器 T(以10进制编号)
定时器是以1ms、10ms、100ms为一个计时单位, 计时方式采用上数计时,当计时器现在值=设定值 时,输出线圈导通。设定值为10进制K值,也可使 用资料暂存器D当设定值。 定时器实际设定时间=计时单位*设定值
台达初级培训-基础 教程(ppt)
台达初级培训-基础教程
培训内容
1. PLC基础知识简介 2. DELTA PLC基础介绍 3. 特D、特M介绍 4. WPLSoft编程软件介绍 5. WPL基本指令与应用指令介绍
• 1、PLC基础知识简介
PLC基础知识简介
什么是PLC
PLC — Programmable Logic Controller 可编程逻辑控制器
• 输入接点X的功能 输入接点X与输入装置连接,读取输入信号进PLC。 每一个输入接点X的A或B接点在程序中使用次数没 有使用限制。输入接点X之On/Off只会跟随输入装 置的On/Off做变化,不可使用周边装置来强制输入 接点。
Hitech台达人机界面培训

Hitech人机界面与计算机下载连线(RS232):
人机接线端 电脑RS232C 25-pin母接头―――――9-pin母接头 RXD 3 3 SD TXD 2 2 RD GND 7 5 SG RTS 4 8 CTS CTS 5 7 RTS 6 DSR 1 CD 4 DTR
Hitech人机界面接口定义与接线
Hitech人机界面与PLC通讯连线 : 2、与GE 9030 CMM模块 RS422 人机接线端 PLC GE9030 9-pin公接头―――――15-pin公接头 TXD+ 1 11 RDB(RXD+) TXD- 6 10 RDA(RXD-) RXD+ 4 13 SDB(TXD+) RXD- 9 12 SDA(TXD-) 8 CTS+(CTX+) 14 RTS+(RTX+) 15 CTS-(CTX-) 6 RTS-(RTX-)
Hitech人机界面接口定义与接线
Hitech人机界面与PLC通讯连线 : 3、与GE 9030 CMM模块 RS485 人机接线端 PLC GE9030 25-pin母接头―――――25-pin公接头 TD/RD- 15 9 SDA(TXD-) 13 RDA(RXD-) TD/RD+ 14 21 SDB(TXD+) 25 RDB(RXD+) 24 RD GND 7 7 GND
Hitech人机界面接口定义与接线
Hitech人机界面与PLC通讯连线 : 1、与GE Versamax RS232 人机接线端 PLC Versamax 25-pin母接头―――――9-pin公接头 RXD 3 2 SD TXD 2 3 RD GND 7 5 SG RTS 4 7 RTS CTS 5 8 CTS
台达人机培训资料

工控专家
传动先锋
一般曲线与历史最大区别就在于: 一般曲线是在同一时间取不同的 数据点来描出曲线;历史曲线是在不 同时间取同一数据点来描出一条曲 线。
工控专家
传动先锋
功能
6、报警表
警报信息 人机会依照警报区指定的PLC缓存器的相对Bit资料, 转换为对应的接点警报消息正文显示在人机屏幕上, 并且依序逐笔记录成为警报历史表。 人机只显示目前警报设定之PLC的Bit资料=ON/OFF 的接点警报消息正文在人机屏幕上。
工控专家
传动先锋
2、状态图显示: 在人机与PLC联机使用时,如果您希望由PLC控制复数 个图形显示在人机屏幕的固定位置,并可控制它的状 态而能显示不同的图形文件。 (见例子程序)
工控专家
传动先锋
3、动画 在人机与PLC联机使用时,如果您所规画的动态图形元 件,您希望由PLC控制一个图形显示在人机屏幕的任 何位置,并可控制其在X或Y方向任意移动且能显示不 同的图形文件。(见例子程序)
工控专家
传动先锋
4、一般曲线 人机读取相对应地址的连续资料,转换为曲线图后显 示于人机屏幕上。例如:取样100点,设四条曲线,那 么总共会取100 x 4共400点。以台达的PLC为例子来说 明,读取地址设为D0,那么此曲线图触发后,将会读 取D0~D399共400个WORD的资料;曲线1的Y轴位置为 D0~D99;曲线2的Y轴位置为D100~D199;曲线3的Y 轴位置为D200~D299;曲线4的Y轴位置为300~D399。 如果其值有超过所设定最大值,则显示最大值。如果 小于最小值,则显示最小值。设定好了后,还要设定 控制区的地址,利用设定的特定位来激发曲线图的资 料读取跟一般曲线图的描绘与清除曲线,有关控制区 的设定请参考 系统控制区说明。 程序例子
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
30
控制区 / 状态区弹性规划
可自由开启所需要的控制区、状态区 提供更大的弹性以及节省PLC寄存器
31
宏指令编辑界面升级
可同時查看多个宏指令 编辑宏指令时,可同时查看元件地址 自定义子宏名称
可直接呼叫子宏 名称
GOTO指令标示,更方便的查看跳行指令
32
新元件功能-1
可自定义数值输入/显示示元件字体,画 面规划更 美观
B07E515
7” 800x600 128 MB 64 MB Yes
v1.1
N/A N/A 172.4 x 132.4mm
v2.0
N/A N/A 172.4 x 132.4mm
19
v2.0
Yes Yes 172.4 x 132.4mm
Ethernet
Panel Cutout
台达人机新机种介绍
DOP-B07PS415/515
纺织,电子,机床,药机,食品,包装,电力,印刷,木工,工厂自动化, 产线数据监控不采集,SI项目
18
比较表
5.6” 320x234 184
7”
800x600 144
B07S515
7” 800x600 128 MB 64 MB Yes
184
144
B05S101 Display Size
Resolution Flash ROM SDRAM SD Card USB Client Audio 5.6” 320x234 8 MB 16 MB N/A
3. 支持MP3/WAV音效格式的播放功能
上市年份:2011
应用行业:
纺织,电子,机床,药机,食品,包装,电力,印刷,木工,工厂自动化, 产线数据监控不采集,SI项目
16
B07宽屏机种比较表
B07S201 B07S211 Resolution Flash ROM SDRAM Function Key SD Card USB Client Audio Ethernet Panel Cutout 480x234 4 MB 16 MB
台达人机新机种介绍
DOP-B07S/E515
1. 业内首款7″800×600分辨率。提供更细 腻的显示,更多的元件空间 2. 不台达5.7″相同开孔尺寸,直接升级,异 常方便 3. 无辅助键,窄边框设计,外观更漂亮 4. 提供SD不USB两种插槽,扩展数据存储 更便捷 上市年份:2011
应用行业:
B07S415 800x480 128 MB 64 MB
B07E415 800x480 128 MB 64 MB
8
N/A v1.1 N/A N/A 196.9 x 142.9mm
17
N/A
Yes v2.0 N/A N/A 196.9 x 142.9mm
N/A
Yes v2.0 Yes Yes 196.9 x 142.9mm
应用行业:
纺织,电子,机床,药机,食品,包装,电力, 印刷,木工
14
14
比较表
Model Size Display DOP-B07S201/211 DOP-B07S411K DOP-B07S411 DOP-B07S415
7” TFT LCD(65536 colors) 480 x 234 pixels
3. 4MB Flash ROM
4. 超薄、高彩、时尚小型人机的唯一选择 上市年份:2011 QVGA
WQVGA
320X240 480X272
12
应用行业:
医疗、制药、交通、纺织、试验设备
台达人机新机种介绍
DOP-B07S410/411
1. 7 ″彩色宽屏TFT面板,800×480分辨率 2. 不台达PLC完美搭配,其中B07S410只可不 台达PLC通讯,只有一个COM口,精简型, 高性价比。 3. 不B07宽屏系列开孔尺寸相同
Serial COM
COM2
COM3
Function Keys
RS-422/RS-485
RS-422/RS-485
15
台达人机新机种介绍
DOP-B07S/E415
1. 7 ″高彩宽屏TFT显示面板,800×480分 辨率 2. 搭配eServer / eRemote网络软件,轱 松达到整体监视及控制目的;高速USB 下轲,USB Ver2.0
1. B07与业机种,支持ASDA-A2电子凸轮曲线造 表功能
★造表宏支持的造表模式如下 • 自动飞剪可调整同步区 • 间接式印刷 • 自动飞剪-cos 补偿 ★三次曲线造表(手动造表) 2. 不台达7″屏相同开孔尺寸,直接升级,异常方便
上市年份:2012
应用行业:
慢走丝机床、电火花加工机床、试验机、多轰同步应用、 精密加工机床、填充灌瓶设备、送料机、木工机械、线切 割机、包装设备、印刷设备、纺织设备
7” TFT LCD(65536 colors) 800 x 480 pixels
7” TFT LCD(65536 colors) 800 x 480 pixels
7” TFT LCD(65536 colors) 800 x 480 pixels
Resolution
Backlight CPU Flash ROM SDRAM Backup Memory
Flash ROM 128 MB (OS Flash ROM 128 MB (OS Flash ROM 128 MB (OS System: 30MB / Backup: System: 30MB / Backup: System: 30MB / Backup: 16MB / User Application: 16MB / User Application: 16MB / User Application: 82MB) 82MB) 82MB) 64Mbytes 16Mbytes 64Mbytes 16Mbytes 64Mbytes 16Mbytes
Sound output
Buzzer AUX USB COM1 N/A 1 USB Host Ver 1.1 / 1 USB Client Ver 1.1
Multi-Tone Frequency(2K ~ 4K Hz)/85dB N/A 1 USB Host Ver 1.1/ 1 USB Client Ver 2.0 N/A 1 USB Host Ver 1.1 / 1 USB Client Ver 2.0 N/A 1 USB Host Ver 1.1/ 1 USB Client Ver 2.0
22
台达人机新机种介绍
DOP-B08S/E515
1. 集成以太网不音频输出 2. eRemote不eServer软件支持,远程监 控不数据采集轱松实现 3. “多屏一机”功能,连接方便,高速, 简便 4. 通讯端口隔离设计,现场抗干扰能力更 强 上市年份:2011
应用行业:
纺织,电子,机床,药机,食品,包装,电力,印刷,木工 ,工厂自动化, 产线数据监控不采集,SI项目
DOP网绚型人机搭配eServer应用于空调计量系统
客户工厂厂区内提供办公室给进厂施工单位办公不休息使用,各施工单位于施工期间 可自行设定使用办公室的空调系统,需要一个空调计量系统,可提供远程监控不记录 各办公室实际使用空调状况,用来统计耗电量以及计算电费以便于向施工单位结算。
控制要点以及动作说明
37
台达B系列人机家族
Presented by : 李佳 June. 26th, 2012
目录
1 台达人机产品介绍
2
3 4
台达人机新机种介绍
全新编程软件DOPSoft 精选应用案例
2
DOP-B系列人机界面
荣获2010德国红点设计大奖
高容量 存储 高彩 高分辨率
高速传输
缩短装机 高保真音效 高保真音效 不 设计时间
23
全新编程软件DOPSoft
24
全新编程软件DOPSoft
DOPSoft-界面升级1
软件界面再进化,带给你全新的编程体验
25
全新编程软件DOPSoft
DOPSoft-界面升级2
快速预览
可快速的预览检视元件外观
更方便的文字编辑界面
可快速编辑丌同状态的文字并可以 同时编辑多国语言文字
26
多国语系EXCEL编辑
画面多国语系可汇出成EXCEL编辑后,再汇入软件大幅提升编辑 方便性。
27
多语系系统菜单
更亲切、友善的设定界面
28
直立/水平显示
直立 / 水平显示 提供更弹性的规划可能,支持0 / 90 /180 / 270四种显示方向 。
29
打印机驱动:PictBridge
• 支持泛用打印机驱动:PictBridge • http://www.cipa.jp/pictbridge/CertifiedModels/PictB ridgeCertifiedModels_E.html
传统行通讯
9
高速以太网络
新USB上下载模式
丌需要安装驱动程序,完全兼容Windows Vista/Windows7。
10
高速以太网下载
11 可自定义HMI名称
台达人机新机种介绍
DOP-B04S211
1. 4.7″ TFT LED面板,提供480×272高分辨率 2. 精致工业化外观设计,全新视觉享受
应用案例(1)
DOP网绚型人机搭配eServer应用于空调计量系统
• 在PC上安装MYSQL数据库,并设定资 料表不栏位 • 在PC上安装台达eServer软件,并 设定每小时将人机采集的资料写入 MYSQL资料库中
上市年份:2011
应用行业:
纺织,电子,机床,药机,食品,包装,电力, 印刷,木工
13
台达人机新机种介绍
DOP-B07S411K