饮料瓶计数系统的设计
课程设计---啤酒生产线自动计数装置设计

啤酒生产线自动计数装置设计摘要:该计数器的设计以光电断路器作为最基本的发射和接收电路,通过光电信号的转换,将得到的最基本的脉冲信号,随后通过整形电路将所得的脉冲信号进行整合,消除因外界影响而带来的计数误差,设计中,整形电路采用了用555定时器构成的施密特触发器对有滚光电断路器得到的最基本的脉冲信号进行整形,并且将其规范化为规则的矩形脉冲,在整形过程中主要运用物理消抖的方法,防止物体在传送过程中因物体抖动而产生的误计数问题.其特点是思路简单,清晰,成本低,便于操作和实施。
目录1 系统设计1.1方案确定1.2设计意义与优点1.3设计思路1.4设计框图2 硬件系统设计2.1信号采集模块2.2信号整形模块2.3信号技术模块3 系统组装与调试4 结论谢词参考文献附录引言现代化的生产越爱越讲求高效,在最短的时间内以最少的人力和物力.财力去实现最大的利益化,也越来越成为商家不言而喻的选择,因此,流水化的生产线适应于时代的潮流应运而生,而对流水线上通过的各个物体的检测的机器化也成为一种必然.而基于光电信号之间状环的电路,则广泛应用于制动控制,宇航等各个领域.其中,光电断路器是将电信号转换为光信号的发光元件,与蒋光信号变换为电信号的受光元件组合成一体化结构的光敏传感器.主要用于检测发光与受光元件之间通过的物体.通过物体通过前后受光元件所接收到的光线好的强弱的不同而产生的不同的电压信号.将该基本电压信号通过检波,整形,计数,由LED显示其通过的物体个数的多少,从而实现了无人参与,制动计数的功能.1系统设计由课设要求可知,该电路除去实现最基本的信号发生和接收外,还需克服外界干扰光的影响,瓶子抖动带来的误动作,以及克服因瓶间距不同而产生的计数影响的问题.于是,我们将电路划分为三大模块,通过分模块依次来消除外界产生的种种影响,以下是该电路的三大主模块: (1)信号采集模块本模块中我们采用了透光型的光电断路器GNY17-2,其结构示意图如下图所示,其中高断路器的发光元件采用输出大,寿命长,可靠性高的红外发光二极管,受光元件采用响应特性好与红外发光二极管的发光波长相匹配的光敏晶体管以及光敏二极管与信号发达电路和信号处理电路混合的单片化,它可以非接触式检测物体,相对检测物体的检测精度高,响应速度快,并且方便与TTL,MOS等电路连接。
饮料灌装机的PLC程序设计
摘要作为通用工业控制计算机,可编程控制器实现了工业控制领域接线逻辑到存储逻辑的飞跃,在世界工业控制中发挥着越来越重要的作用。
鉴于此,设计者利用PLC的功能和特点设计出了一款饮料灌装生产流水线控制系统。
本课题主要用了三菱PLC,传感器,继电器等。
采用PLC是用了它的自动控制能力好的特点,这样可以在生产过程中无需有人控制。
文章刚开始介绍了PLC的相关知识,给出了PLC的定义、功能、特点及应用范围,并引申到在本系统的应用中。
文章对系统中所用到的元器件的原理也做了详细介绍,在对系统设计的说明中,文章详细的给出了系统实现的功能及其控制方法。
最后对系统的软件编程及程序编辑做了说明。
关键词可编程控制器饮料灌装生产流水线系统元器件 PLC 软件系统目录绪论 (2)第一章可编程控制器概述 (3)1.1 PLC的定义 (3)1.2 PLC的基本组成 (3)1.3 PLC的主要特点 (4)1.4 PLC的功能 (5)1.5 PLC的应用范围 (5)第二章元器件工作原理 (6)2.1 PLC工作原理 (6)2.2 传感器的工作原理 (9)2.3 中间继电器的工作原理 (10)第三章PLC控制系统设计方法 (11)3.1 PLC课程设计原则、方法 (11)3.2 PLC常用编程元件 (12)3.3 PLC软件使用 (14)第四章饮料罐装设备的PLC控制设计 (20)4.1 控制系统分析 (20)4.2 I/O端口分配 (20)4.3 梯形图 (20)4.4语句表 (23)第五章程序调试 (24)5.1 调试方法 (24)5.2 调试过程 (25)第六章结论和展望 (27)致谢 (28)参考文献 (29)绪论一、课题研究背景几年前。
自动化技术只占包装机械设计的30%,现在已占50%以上,大量使用了微电脑设计和机电一体化控制。
提高包装机械自动化程度的目的,一是为了提高生产率:二是为了提高设备的柔性和灵活性;三是为了提高包装机械完成复杂动作的能力。
基于PLC控制的饮料瓶自动装箱系统的设计

基于PLC控制的饮料瓶自动装箱系统的设计摘要本文介绍了一种基于PLC控制的饮料瓶自动装箱系统的设计。
该系统实现了从饮料瓶输送到包装箱装载的自动化过程。
系统由PLC控制器、传感器、执行机构等组成,通过PLC控制器对传感器信号的处理和执行机构的控制,实现了自动化生产过程。
经测试,该系统性能稳定、操作简单,能够满足工业生产需要。
关键词:PLC控制、饮料瓶自动装箱、传感器、执行机构AbstractThis paper introduces the design of a beverage bottle automatic packing system based on PLC control. The system realizes the automation process from beverage bottle conveying to packaging box loading. The system is composed of PLC controller, sensors, executing mechanism, etc. Throughthe processing of sensor signals and the control of executing mechanism by PLC controller, the automation production process is realized. The system has stable performance,simple operation and can meet the needs of industrial production.Keywords: PLC control, beverage bottle automatic packing, sensor, executing mechanism1.引言现代工业生产中,机器自动化已经成为必需的生产方式,自动装箱作为其中一个重要环节,也得到了越来越广泛的应用。
PLC控制饮料瓶的自动装箱系统 (1)
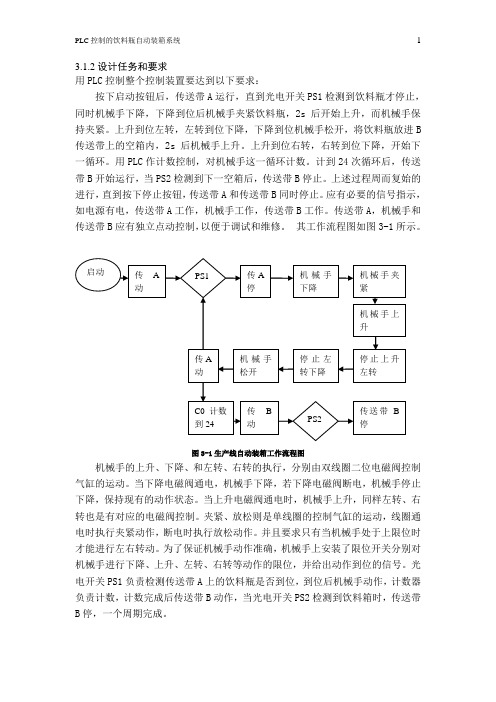
3.1.2设计任务和要求用PLC 控制整个控制装置要达到以下要求:按下启动按钮后,传送带A 运行,直到光电开关PS1检测到饮料瓶才停止,同时机械手下降,下降到位后机械手夹紧饮料瓶,2s 后开始上升,而机械手保持夹紧。
上升到位左转,左转到位下降,下降到位机械手松开,将饮料瓶放进B 传送带上的空箱内,2s 后机械手上升。
上升到位右转,右转到位下降,开始下一循环。
用PLC 作计数控制,对机械手这一循环计数。
计到24次循环后,传送带B 开始运行,当PS2检测到下一空箱后,传送带B 停止。
上述过程周而复始的进行,直到按下停止按钮,传送带A 和传送带B 同时停止。
应有必要的信号指示,如电源有电,传送带A 工作,机械手工作,传送带B 工作。
传送带A ,机械手和传送带B 应有独立点动控制,以便于调试和维修。
其工作流程图如图3-1所示。
图3-1生产线自动装箱工作流程图机械手的上升、下降、和左转、右转的执行,分别由双线圈二位电磁阀控制气缸的运动。
当下降电磁阀通电,机械手下降,若下降电磁阀断电,机械手停止下降,保持现有的动作状态。
当上升电磁阀通电时,机械手上升,同样左转、右转也是有对应的电磁阀控制。
夹紧、放松则是单线圈的控制气缸的运动,线圈通电时执行夹紧动作,断电时执行放松动作。
并且要求只有当机械手处于上限位时才能进行左右转动。
为了保证机械手动作准确,机械手上安装了限位开关分别对机械手进行下降、上升、左转、右转等动作的限位,并给出动作到位的信号。
光电开关PS1负责检测传送带A 上的饮料瓶是否到位,到位后机械手动作,计数器负责计数,计数完成后传送带B 动作,当光电开关PS2检测到饮料箱时,传送带B 停,一个周期完成。
启动传A动传A 停机械手下降PS1机械手夹紧 机械手上升停止上升左转停止左转下降 机械手松开 传A 动 C0计数到24 传B 动PS2传送带B 停3-2 控制系统构成图和工作流程图3表4-1 系统I/O点的分配表控制信号元件名称元件符号地址编号输入信号下限位开关SQ2 I0.2 上限位开关SQ1 I0.1 左限位开关SQ3 I0.3 右限位开关SQ4 I0.4 检测饮料瓶光电开关PS1 I0.6 检测空箱光电开关PS2 I0.7 自动开关SB3 I2.1 手动开关SB4 I2.2 传A手动SB5 I1.0 传B手动SB6 I1.7 手动上升SB7 I1.1 手动下降SB8 I1.2 手动左转SB9 I1.3 手动右转SB10 I1.4 手动夹紧SB11 I1.5 手动松开SB12 I1.6 启动按钮SB1 I0.0 停止按钮SB2 I0.5输出信号机械手下降KM2 Q0.2机械手上升KM1 Q0.1机械手左转KM3 Q0.3机械手右转KM4 Q0.4夹紧松开KM5 Q0.5传送带A输出YV1 Q0.6传送带B输出YV2 Q0.75I0.4,I0.1I0.0启动 保持 传送带AI0.6 PS1 下降 机械 I0.2 下限位 手 夹紧并保持 总 循 体 环 T37 循 进 上升 环 行I0.1上限位 左转I0.3左限位 下降I0.2下限位 松开T38 C0 上升 传B 动I0.1上限位 PS2 右转 传B 停图5-1系统自动控制流程图5.2 梯形图(1)自动控制梯形图 网络1 启动回路原位 M11.1 M10.1 M10.2 M10.3 M10.4 M10.5 M10.6 M10.7 M11.0 T38 Q0.6 Q0.2 Q0.5 Q0.1 Q0.3 Q0.2 Q0.5 Q0.1 C0 T37 M10.7 Q0.7 M20.0 Q0.7 Q0.4网络2 上限位标志位网络3 右限位标志位网络4 传送带A检测到工件标志位网络 5 传送带A(启动后传送带A运行,直到检测到饮料瓶后停止)网络6 移位寄存器的数据输入端DATA由M10.1-M11.1各位的常闭触点,上升限位的标志位M1.1、右转限位的标志位M1.4及传送带A检测到饮料瓶的标志位M1.6串联组成,若光电开关检测到饮料瓶,则M10.0置1,这作为输入的数据)网络7 按停止按钮移位寄存器复位,机械手松开网络8 移位脉冲信号由代表步位状态中间继电器的常开触点和代表处于该部位的转换条件接点串联支路依次并联组成网络10 机械手夹紧置位网络11 机械手夹紧与松开网络12 机械手上升网络13 机械手左转网络14 夹紧复位网络 16 计数器计数网络17网络18 传送带B5-2-1自动控制系统程序梯形图自动控制过程分析按下启动按钮I0.0后,M0.0接通,传送带A运行Q0.6接通,当光电开关PS1检测到饮料瓶时,I0.6发出信号到M1.6,M1.6断开,传A停止;同时M1.6传递信号使M10.0接通,M0.0通过移位寄存器使M10.1接通,然后Q0.2接通,机械手下降。
基于PLC的饮料灌装生产流水线控制系统的设计论文

-----WORD格式--可编辑--专业资料-----基于PLC的饮料灌装生产流水线控制系统的设计摘要PLC 随着计算机和网络通讯技术的发展,企业对生产过程的自动控制和信息通讯提出了更高的要求。
饮料生产线比较复杂,生产环节也很多。
其中饮料的灌装就是饮料生产线上重要的生产环节。
控制系统主要由一台PLC、交流异步电机、液罐、多个灌装状态检测传感器、故障报警蜂鸣器、产量统计显示器等组成。
其中电机用来控制运送饮料瓶的传送带部分。
本控制系统有两个特点:一是输入、输出设备比较多;二是所需实现的控制是顺序逻辑控制、模块控制以及计算统计功能。
西门子S7-300系列PLC在模块控制、高速计数和计算方面的功能较强,实现比较方便。
因此本系统选用了S7-300型号的PLC进行控制,既满足了控制系统所需的I/O 点数,又满足了被控对象的控制要求。
采用PLC控制饮料灌装生产线,实现了饮料生产线的自动化、智能化。
对劳动生产率的提高,饮料质量和产量的提高具有深远的意义。
关键词S7-300可编程序控制器(PLC)/自动化/智能化-----WORD格式--可编辑--专业资料-----基于PLC的饮料灌装生产流水线控制系统的设计第1章课题背景研究1.1饮料灌装生产流水线的概述近年来,饮料工业发展迅猛,碳酸饮料、果汁饮料、蔬菜汁饮料、含乳饮料、瓶装饮用水、茶饮料等品种不断丰富,产量上的飘红,使得对设备市场的需求也呈牛市。
国外灌装与封口设备向高速发展世界灌装机向高速、多用、高精度方向发展,目前部分灌装生产线已可以在玻璃瓶与塑料容器(聚酯瓶)、碳酸饮料与非碳酸饮料、热灌装与冷灌装等不同要求和环境下作用。
目前碳酸饮料灌装机灌装速度最高已达2000罐/分,德国H&K公司灌装机的灌装阀多达165头,SEN公司144头,Krones公司178头,灌装机直径大至5米,灌装精度0.5ml以下。
非碳酸饮料灌装机灌装阀50~100头,灌装速度最高达1500罐/分,灌装机料槽转速20~25转/分,速度提高1倍。
基于PLC的饮料自动罐装系统毕业设计

毕业设计(论文)题目:自动化生产线中的饮料灌装系统——软件设计学生姓名:学号:专业:班级:指导教师:年月日河北工程大学毕业设计(论文)任务书题目:自动化生产线中的饮料灌装系统——软件设计学生姓名:学号:专业班级:学院:设计起止日期:题目性质一:实际工程目学研究论研究题目性质二:真题拟题目其他技术要求及原始数据:系统基于PLC-200,主要功能完成饮料灌装生产过程,明确装瓶,传送,盖盖,检测过程,并可以启动,移位,复位按钮进行操作,实现手动,自动全过程。
主要任务:1、绘制工作流程图或顺序功能图;2、编写全程序T型图或指令表;3、运用程序进行调试;4、编写设计说明书;学生(签字):系主任(签字):指导教师(签字):院长(签字):河北工程大学毕业设计(论文)评语学生姓名专业班级毕业设计(论文)题目自动化生产线中的饮料灌装系统——软件设计1、指导老师评语:指导教师(签字)年月日2、评阅人评语:评阅人(签字)年月日3、答辩组评语:答辩组组长(签字)年月日摘要随着工业自动化水平日益提高,众多工业企业均面临着传统生产线的改造和重新设计问题。
PLC(可编程序控制器)是以微处理器为核心的工业控制装置,它将传统的继电器控制系统与计算机技术结合在一起,近年来在工业自动控制、机电一体化、改造传统产业等方面得到普遍应用。
作为通用工业控制计算机,其实现了工业控制领域接线逻辑到存储逻辑的飞跃,在世界工业控制中发挥着越来越重要的作用。
在饮料行业,自动化生产线的生产方式是推广的最普及的一种生产模式,它促使灌装的速度大幅提升,同时也使得灌装精度更高,给企业带来了不可小觑的生产力。
鉴于此,设计者利用PLC 的功能和特点设计出了一款饮料灌装生产流水线控制系统。
本文所涉及的饮料灌装自动化生产线采用PLC控制,流量计计量,确保了灌装的速度和精度。
本文详细论述了饮料灌装机控制系统的设计步骤,通过对灌装机系统的充分了解,以行业现状为出发点,结合其他行业自动控制技术的应用情况,提出了基于PLC的饮料灌装机控制系统的基本结构。
计算机控制技术项目实例15 饮料瓶计数喷码
瓶装饮料如矿泉水生产工艺中,灌装 完成后装箱前可使用喷码机进行喷码。
控制系统
某饮料瓶计数喷码控制系统主要由传感器、检 测电路、喷头、电磁阀、输入装置、输出装置和计 算机等部分组成。
接近开关
检测电路 电磁阀 喷头
输入装置
计
算
输出装置传感器可采用电容式接近开关。当饮料瓶移动到 开关探头下方时,开关响应经检测电路输出开关信 号,通过输入装置送入计算机,计算机计数程序加1。
计算机控制技术项目教程 —
实例15 饮料瓶计数喷码
应用背景
喷码机用来在产品表面喷印各种信息。 优点突出,并且可以和计算机连接进行复 杂数据库的喷印。
应用背景 按需滴落式喷码机的喷头由多个高精 密阀门组成,在喷字时,字型相对应的阀 门迅速启闭,墨水依靠内部恒定压力喷出, 在运动的表面形成字符或图形。
毕业论文-基于plc的饮料灌装机控制系统设计

毕业设计说明书题目基于plc的饮料灌装机控制系统设计专业机械制造与自动化班级 1001 班学生姓名指导老师2016年1月3日目录摘要 (1)第一章绪论 (3)1.1 设计内容 (3)1.2 控制要求 (3)1。
3 设计要求 (3)第二章控制系统方案设计 (4)2。
1 饮料灌装流水线的基本结构 (4)2.2灌装流水线的工作原理 (5)第三章硬件控制设计 (6)3。
1 PLC的选择 (6)3.2 传感器的选择 (7)3。
3 硬件电路的设计 (7)第四章软件控制设计 (8)4。
1 系统流程图 (8)4。
2 I/O分配表 (10)4.3 I/O接线图 (11)4.4梯形图 (12)4.5指令表 (14)第五章调试说明 (15)第六章总结 (15)致谢 (16)参考文献 (17)摘要随着计算机和网络通讯技术的发展,企业对生产过程的自动控制和信息通讯提出了更高的要求.饮料生产线比较复杂,生产环节也很多。
其中饮料的灌装就是饮料生产线上重要的生产环节.控制系统主要由一台PLC、交流异步电机、液罐、多个灌装状态检测传感器、故障报警蜂鸣器、产量统计显示器等组成.其中电机用来控制运送饮料瓶的传送带部分。
本控制系统有两个特点:一是输入、输出设备比较多;二是所需实现的控制是顺序逻辑控制、模块控制以及计算统计功能。
采用PLC控制饮料灌装生产线,实现了饮料生产线的自动化、智能化。
对劳动生产率的提高,饮料质量和产量的提高具有深远的意义。
关键词可编程序控制器(PLC)/自动化/智能化AbstractWith the computer and network communication technology,business-to-production process automation and information and communication put forward higher requirements。
Beverage production line more complex production processes are also numerous。
饮料瓶计数系统的设计
附件1南华大学微型计算机控制技术课程设计设计题目饮料瓶计数系统学生姓名刘明星专业班级自动化1002班学号***********指导老师目录1 设计的目的与意义2 控制系统工艺流程及控制要求3 总体设计方案4 软硬件设计5 课程设计实验(仿真部分)6 调试或仿真过程中遇到的具体问题和解决办法7 收获和体会8 参考文献1设计目的与意义中国饮料市场已成为中国食品行业中发展最快的市场之一,我国饮料企业成本、区位优势明显,同时也存在技术落后,创新力不足,企业产品单一,国际贸易能力差等问题。
我国人民生活水平的快速发展给饮料企业带来了更加广阔的市场,饮料企业应该加快技术升级和规模扩展以应对来自外资企业的竞争。
饮料瓶计数技术系统是一种较为先进的控制技术,能够解放劳动生产力,提高计数的准确度,加快生产,降低成本。
2控制系统工艺流程及控制要求基本要求:(1)对通过计数传感器的饮料瓶数目进行计数显示,当饮料瓶计数器达到9590-9600时,发出溢出报警信号,计满后系统暂停。
(2)每24瓶装满一箱,显示包装好的饮料的箱数;(3)每20箱重新启动;(4)系统暂停10分钟后重新启动;(5)记录系统重新启动的次数;(6)记录时间。
3总体设计方案3.1计数传感器的选择根据流水线的工作实际情况,应该采用光电计数传感器,光电计数器是通过红外线发射和接收进行计数,有直射式和反射式两种,通常用于流水线的工件一车,显示包装好的饮料的车数,同时发出报警信号,显示可以装车;拓展部分(1)系统暂停10分钟后计数。
直射式的发射、接收分体,发射器和接收器分别置于流水线两边,中间没有阻挡时发射器的红外线射到接收器,接收器接收到发射来的红外线,经反相处理使之没有信号输出,有工件经过时挡住光路,接收器失去红外线信号便输出一个脉冲信号到运算累加器进行计数;反射式是发射、接收同体,置于流水线一边,前面流水线上没有东西时,发射器发出的红外线直接射出没有反射,接收器没有接收到反射来的红外线信号没有输出,有工件经过时挡住光路使发射器发出的红外线信号反射到接收器,接收器接收到反射来的红外线信号便输出一个脉冲信号到运算累加器进行计数。
饮料瓶计数器设计说明书

饮料瓶计数器设计说明书某消费线饮料瓶计数设备设计学 院:系专 指点教员:2021年6月信息商务学院 自动控制系某消费线饮料瓶计数设备设计摘要瓶装及灌装饮料曾经成为人们补充维生素和调味的重要一类饮品,它以自己快捷饮用方便贮藏等诸多优点遭到群众的分歧喜欢。
依据设计要求本设计全部由硬件完成,系统触及光电传感器,运算累加器,计数器等部件,具有自检复位等环节。
设计由自检装置、光电计数器、整形局部、加法器、数码管及其驱动装置、加法器进位及复位装置、正相缓冲器、并入串出移位寄存器、收发器组成。
设计中用到了多种芯片,经过每种芯片不同的功用,停止逻辑上的合理组合来到达设计的初衷,本篇就以计数设备的硬件加以设计改良,到达加快消费,提高消费率,降低本钱的目的。
关键词:光电计数器,硬件设置,单片机设计,芯片逻辑组合Beverage bottle count device settingAbstractBottled and filling drinks have become an important category of vitamin and flavor drinks, it is easy to drink for their own convenience store and many other advantages by the public unanimously like. According to the design requirements of the design are realized by hardware, the system involves photoelectric sensor and operation accumulator, counter parts, with self reset link. Designed by self checking device, photoelectric counter, plastic parts, adder, digital tube and its driving device, adder and a resetting device, a positive phase buffer, incorporated into the serial shift register, transceivers. Design uses a variety of chips, by every kind of chips with different functions, reasonable combination of logic to achieve the design intention, this is with a counting device hardware design improvement, to speed up production, improve productivity, reduce the cost of.Keywords: photoelectric counter, hardware setting, chip design, chip logic combination目录1 设计的目的与意义 (1)1.1 本课题的研讨背景及意义 (1)1.2 本课题国际外研讨现状现状 (2)1.3 本设计基于的理念 (3)2 控制系统工艺流程及控制要求 (5)2.1 设计方案 (5)3 硬件局部设计 (7)3.1 光电计数器 (7)3.1.1 红外发接纳电路 (8)3.1.2 自检装置NE555 (9)3.2 整形局部 (11)3.2.1 芯片74HC14N (12)3.3 加法器 (14)3.3.1 CD4518芯片进位设置 (15)3.3.2 复位按钮设置 (16)3.3.3 CD4518引见 (17)3.4 数码管及其驱动装置 (19)3.4.1 CD4511芯片 (20)3.4.2 八位数码管 (22)3.5 系统输入设置 (24)3.5.1 单片机AT89C51 (25)3.5.2 芯片MAX232 (29)3.5.3 C51单片机和电脑串口通讯电 (31)4 模拟仿真局部 (34)参考文献 (36)致谢 (39)1 设计的目的与意义在电子技术飞速开展的明天,电子产品的兽性化、智能化和自动化的开展曾经十分成熟了,其开展前景依然不可估量而且十分可观。
模拟饮料易拉罐自动计数且数显计数装置设计
专业技能训练三设计报告1.模拟饮料易拉罐自动计数且数显计数装置设计专业班级:学生姓名:学号:指导教师:设计时间:模拟饮料易拉罐自动计数且数显计数装置设计一、设计任务与要求(1)能区分大小饮料易拉罐(用校园卡模拟,长边通过时模拟大易拉罐,通过一次亮一次红灯,短边通过时模拟小易拉罐,通过一次亮一次绿灯),并分别用一位数码管显示计数,计数从0-9,超过9以后计数停止,必须清零方可新一轮计数。
制作时将红外发射、接收系统安置在作品的万能板或PCB板上,二者保持1cm的距离。
(2)设计所需的直流电源。
二、方案设计原理图设计:主要芯片:1、CD40110 为十进制可逆计数器/锁存器/译码器/驱动器,具有加减计数,计数器状态锁存,七段显示译码输出等功能2、74ls系列芯片74ls00 为四组 2 输入端与非门(正逻辑)74ls20为两个4输入与非门,内含两组4与非门第1组:1,2,4,5输入6输出。
第2组:9,10,12,13输入8输出3、NE555NE555的作用是用内部的定时器来构成时基电路,给其他的电路提供时序脉冲。
三、元件清单表1元件清单2.实物图:正面反面四、测试方法1、罐计数的测试电路正确接入5V电源,数码显示管显示都为0,将校园卡长边从红外对管中间从上划下一次,上面的数码显示管显示1,继续划,直到显示为8,再划不继续计数,下面的显示管一直显示0,按下复位按键,数码管清零。
2、拉罐计数的测试电路正确接入5V电源,数码显示管显示都为0,将校园卡短边从红外对管中间从上划下一次,下面的数码显示管显示1,继续划,直到显示为8,再划不继续计数,上面的显示管一直显示0,按下复位按键,数码管清零。
3、清零的测试当数码管计数状态时,分别按下其对应的复位按键,则改数码显示管立即清零,可进行下一次计数五、设计建议总的来说这次的课程设计是有一定难度的,在设计电路的过程中我也遇到了很多难题,比如:怎样把设计的部分功能电路都组合起来实现总的电路,怎样改进电路使其简单化等。
课程设计 饮料罐装生产流水线的PLC控制
第一章工艺过程分析和控制要求饮料灌装机用于罐装各种各样的瓶装饮料,适合大中型饮料生产厂家。
早期的罐装机械大多数采用容积泵式、蠕动泵式作为计量方式。
这些方式存在一些缺点。
例如:罐装精度和稳定性难以保证、更换罐装规格困难等。
本系统采用的饮料分装计量是通过时间和单位时间流量来确定的,计量精度由可编程控制器(PLC)控制确定。
PLC控制具有编程简单、工作可靠、使用方便等特点,在工业自动化控制领域应用广泛。
专为PLC应用而设计的触摸屏集主机、输入和输出设备于一体,适合在恶劣的工业环境中使用。
饮料灌装装置主要包括两部分:恒压储液罐灌液和计数部分。
在恒压储液罐灌液中,里面有上限液位和下限液位传感器,它们被淹没时是1状态。
液面低于下限液位时恒压储液罐为空。
饮料通过进液电磁阀流入恒压储液灌,液面到达上限位时进液电磁阀断电关闭,使液位保持稳定。
恒压储液罐下面是罐装头部分,共有若干个灌装头。
夹瓶装置由气缸1驱动下降,下降到位后,夹瓶装置由气缸2夹紧定位,下降及夹紧由行程开关控制位置。
定位夹紧后,罐装头由气压缸3驱动下降,到位后灌装头电磁阀打开,开始灌液,延时后电磁阀关闭,通过电磁阀的开启达到罐装容量控制。
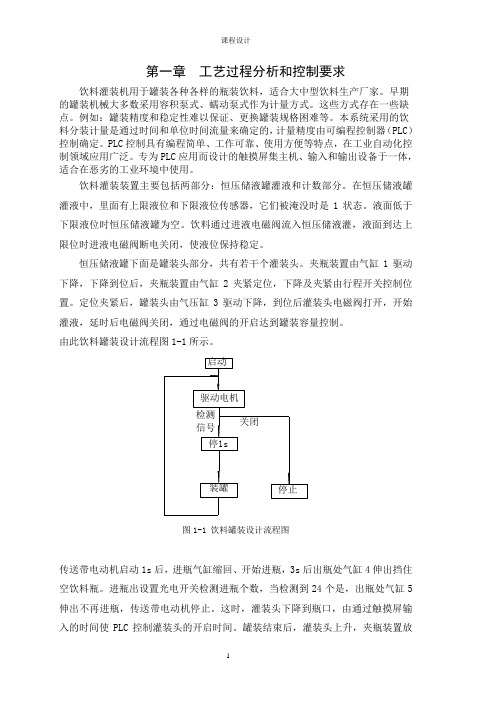
由此饮料罐装设计流程图1-1所示。
图1-1 饮料罐装设计流程图传送带电动机启动1s后,进瓶气缸缩回、开始进瓶,3s后出瓶处气缸4伸出挡住空饮料瓶。
进瓶出设置光电开关检测进瓶个数,当检测到24个是,出瓶处气缸5伸出不再进瓶,传送带电动机停止。
这时,灌装头下降到瓶口,由通过触摸屏输入的时间使PLC控制灌装头的开启时间。
罐装结束后,灌装头上升,夹瓶装置放松、上升。
出瓶处气缸缩回,传送带电动机有开始启动,1s后进瓶处气缸5缩回,光电开关开始检测进瓶个数。
工艺控制要求如下:(1)系统通过开关设定为自动操作模式,一旦启动,则传送带的驱动电机启动饼一直保持到停止开关动作或罐装设备下的传感器检测到一个瓶子时停止;瓶子装满饮料后,传送带驱动电机必须自动启动,并保持到又检测到一个瓶子或停止开关动作(2)当瓶子定位在罐装设备下时,停顿1秒,罐装设备开始工作,罐装过程为5秒钟,罐装过程应有报警显示,5秒后停止并不再显示报警(3)用两个传感器和若干加法器检测并记录空瓶数和满瓶数,一旦系统启动,必须记录空瓶数和满瓶数,设最多不超过99999999瓶。
基于PLC的有偿智能饮料瓶回收装置设计
基于PLC的有偿智能饮料瓶回收装置设计作者:***来源:《甘肃科技纵横》2024年第03期摘要:在现代社会,塑料废弃物的处理已成为一个日益严峻的问题。
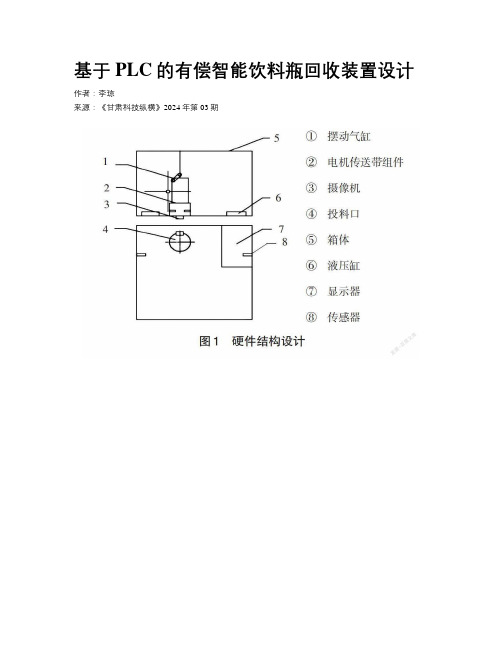
文章设计了一款基于西门子200SMART控制器的有偿智能饮料回收装置,主要由数据收集模块、西门子200SMART可编程控制器、材料识别模块、压缩模块、定量模块、信息录入模块、蜂鸣器提示模块组成。
采用西门子200SMART系列PLC,分别获取塑料饮料瓶材料和数量信息并进行处理,通过摆动气缸完成不同材料饮料瓶的回收,利用紅外传感器完成饮料瓶数量的计数,当计数到达设定值后对饮料瓶进行压缩,仓满后提醒工作人员清仓处理。
该设计为用户提供一种可积分的有偿智能回收装置,让智能回收机架起商业价值与社会价值的桥梁。
关键词:智能饮料瓶回收机;西门子200SMART;环保中图分类号:TH69 文献标志码:A*基金项目:2022年度陕西省教育厅科研计划项目“基于西门子S7-1200PLC的沼气热电联产工程控制系统设计与研究”(22JK0281)。
作者简介:李琼(1992-),女,硕士,讲师,主要研究方向:液压元件的仿真研究。
1 研制背景及意义中国高度重视生态环境保护问题,秉持把“绿水青山就是金山银山”作为生态治理的重要理念,倡导人与自然和谐共生。
作为塑料制品生产和消费大国之一,有效治理塑料垃圾污染尤为重要。
当前,人们对塑料垃圾的管理缺少科学分类和回收的正解认识,对于塑料污染的认识停留在主要是“白色污染”的浅层次认知,而对于废旧塑料包装物隐性的、深层次的“致命危害”认知浅薄。
垃圾分类回收口号喊响后,由于无偿性,各地区落实力度欠佳、商业效益低下,同时,从事塑料垃圾回收工作的中老年人锐减,年轻人从事塑料回收行业的人数更是屈指可数[1-3]。
在此背景下,秉持“减少环境污染,动员公民保护环境”的科学发展观,为保护环境奉献微薄之力,解决塑料饮料瓶随处乱扔和鼓励主动收集空塑料瓶等问题[4],文章提出一种基于PLC控制的有偿智能饮料瓶回收装置,旨在通过自动化回收过程,减少人工操作,提高回收效率,鼓励消费者积极参与到废品回收中来,降低废弃塑料物对生态环境造成的影响。
塑料瓶简易计时器的原理
塑料瓶简易计时器的原理塑料瓶简易计时器的原理是通过水的流动来实现计时功能。
它的基本组成部分包括一个塑料瓶、一根长长的细管、一个计时器和一些水。
下面详细介绍塑料瓶简易计时器的原理。
首先,我们需要准备一个塑料瓶,它可以是普通的矿泉水瓶或可乐瓶。
然后,在瓶盖上钻一个小孔,孔的直径要足够细,使得水可以通过,但不会太快。
孔的位置越接近瓶底部,水流出的速度越快。
接下来,我们需要准备一根长长的细管,管长可以根据需要调整。
将一端固定在瓶盖上的小孔处,确保固定牢固,不会漏水。
此外,还要注意管的直径要适中,过粗或者过细都不利于水流的控制。
然后,我们需要一个计时器。
这个计时器可以是机械式的,也可以是电子式的。
机械式的计时器可以利用弹簧等机械原理来实现计时,而电子式的计时器利用电子元器件实现计时功能。
选择哪种计时器根据实际需求和可用资源来决定。
最后,我们将准备好的塑料瓶立起来,并将细管的另一端放入一个容器中,可以是一个小水池或者一个水桶。
然后,将一定量的水倒入塑料瓶中,注意不要过多或者过少,以免影响计时的准确性。
当我们将水倒入塑料瓶中后,水开始顺着细管流出。
由于细管的直径相对较小,水在流经管道时会受到一定的阻力,从而减慢流速。
而塑料瓶底部孔的直径相对较大,相对于细管来说,水流出的速度会更快。
水从塑料瓶中流出后,会不断地流入容器中。
我们可以在容器上标记出一定的刻度,从而可以根据水位的变化来估算流逝的时间。
当水流出完全时,计时器的时间就是我们所需要的。
塑料瓶简易计时器的原理是基于水的流动来实现计时功能的。
通过控制细管和塑料瓶底部孔的大小,可以控制水流的速度,从而实现计时的功能。
而计时器的作用是记录从水开始流出到水流干净所经过的时间。
总之,塑料瓶简易计时器是一种简单但有效的计时工具。
它的原理是基于水的流动来实现计时功能的。
通过控制水流的速度和计时器的计时功能,可以实现简单的计时操作。
这种计时器简单易制作,成本低廉,并且可以应用于一些简单的家庭实验、游戏或其他日常场景中。
基于PLC控制的饮料瓶自动装箱系统
基于PLC控制的饮料瓶自动装箱系统基于PLC控制的饮料瓶自动装箱系统是一种自动化装箱系统,采用工业自动化控制的理念,通过PLC程序控制器控制,实现对饮料瓶在工厂生产中的装箱过程进行控制。
系统的原理该系统的工作原理如下:将制品从生产线传送带上送至装箱平台,PLC控制器接收到输入信号,根据程序中设置好的参数将饮料瓶分装到相应的工作位置上,同时控制机械臂进行夹取,将饮料瓶放到相应的箱子中,并根据箱子装满的数量自动更换下一个空箱,直至完成整个装箱作业。
系统的组成该系统的主要组成部分包括PLC控制器、伺服机构、传感器、液压系统、运动控制系统、机械臂和箱子位模块等。
PLC控制器:PLC控制器是整个系统的核心,它负责控制整个系统的运行、状态监测和故障处理等功能。
其主要控制程序是基于Ladder语言完成的。
伺服机构:伺服机构是控制机械臂动作的核心部件,其采用先进的伺服控制技术,能够精确控制机械臂的动作,并保证装箱过程的准确性。
传感器:传感器负责检测饮料瓶的位置、数量、形状和大小等参数,并将检测到的信息发送给PLC控制器,以实现系统的自动控制。
液压系统:液压系统是机械臂运动的驱动力,能够保证运动的平稳、快速和准确性。
运动控制系统:运动控制系统是伺服机构的控制中心,它能够控制伺服电机的转速、转向和位置。
机械臂:机械臂负责饮料瓶的夹取和放置,能够实现复杂的运动轨迹和角度转动。
箱子位模块:箱子位模块是用来放置箱子的,其内部装有电机、检测传感器和自动开合箱门等。
系统的优点该自动化装箱系统采用PLC控制器进行控制,具有以下优点:1.自动化程度高,不需要人工干预,能够大幅提高生产效率和减少生产成本。
2.整个系统采用工业化标准设计,具有高可靠性和稳定性,能够适应多种复杂的生产工艺要求。
3.该系统采用伺服机构进行控制,能够实现高速、高精度、高效率的装箱作业。
4.可将系统与计算机网络系统实现联网,能够实现生产过程的实时监控和自动化管理。
PLC工业控制的毕业设计3

附件2:毕业设计(论文)任务书中州大学工程技术学院毕业设计(论文)任务书专业_____ ________年级_______班级______指导老师______________学号_____________ ____学生_____________毕业设计(论文)题目PLC控制的饮料瓶自动装箱系统毕业设计(论文)工作内容与基本要求(目标、任务、途径、方法、成果形式,应掌握的原始资料(数据)、参考资料(文献)以及设计技术要求、注意事项等)(纸张不够可加页)课题任务与实现功能:该自动化系统可把12瓶饮料装成一箱。
本课题设计制作其中的控制电路。
1.设计制作皮带传输机的PLC控制程序。
2.设计制作机械手的PLC控制程序。
该机械手采用PLC控制的一个步进电机带动夹紧机构,一个步进电机带动升降机构,一个步进电机带动移动机构。
该机械手可把饮料瓶抓住放进纸箱内。
3.用PLC作计数控制。
对饮料瓶计数,计到12后,移走纸箱。
4.设计部分相关的硬件电路,主要是光电传感、一些继电器,步进电机,以及相关机械部件。
(设计出与PLC的关系)。
设计要求采用欧姆龙系列PLC作为控制器。
采用梯形图语言编程。
主要完成以下要求:1.设计制作步进电机控制的PLC控制程序。
2.完成系统组态或硬件配置;3.正确合理的进行编程元件的通道分配;4.画出输入/输出接线图、梯形图及相关的图纸(0号);5.编制系统的操作说明;6.编制系统的调试说明及注意事项;注意:自选用步进梯形图还是基本逻辑梯形图编程。
应画出状态转移图或框图,梯形图和程序的可读性应较好。
本设计题目在掌握欧姆龙系列PLC基础上完成,设计所需资料可参考欧姆龙系列说明,通过查阅国内外资料及相关论文、著作最终完成课题。
指导老师:日期:2010年11月专业(教研室)审批意见:审批人签名:日期:年月附件2:毕业设计(论文)任务书中州大学工程技术学院毕业设计(论文)任务书专业_____ ________年级_______班级______指导老师______________学号_____________ ____学生_____________毕业设计(论文)题目步进电机控制毕业设计(论文)工作内容与基本要求(目标、任务、途径、方法、成果形式,应掌握的原始资料(数据)、参考资料(文献)以及设计技术要求、注意事项等)(纸张不够可加页)1.控制要求:在生产生活中常用到步进电机,工作方式为双四拍为其中常用一种。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附件1南华大学微型计算机控制技术课程设计设计题目饮料瓶计数系统学生姓名刘明星专业班级自动化1002班学号***********指导老师目录1 设计的目的与意义2 控制系统工艺流程及控制要求3 总体设计方案4 软硬件设计5 课程设计实验(仿真部分)6 调试或仿真过程中遇到的具体问题和解决办法7 收获和体会8 参考文献1设计目的与意义中国饮料市场已成为中国食品行业中发展最快的市场之一,我国饮料企业成本、区位优势明显,同时也存在技术落后,创新力不足,企业产品单一,国际贸易能力差等问题。
我国人民生活水平的快速发展给饮料企业带来了更加广阔的市场,饮料企业应该加快技术升级和规模扩展以应对来自外资企业的竞争。
饮料瓶计数技术系统是一种较为先进的控制技术,能够解放劳动生产力,提高计数的准确度,加快生产,降低成本。
2控制系统工艺流程及控制要求基本要求:(1)对通过计数传感器的饮料瓶数目进行计数显示,当饮料瓶计数器达到9590-9600时,发出溢出报警信号,计满后系统暂停。
(2)每24瓶装满一箱,显示包装好的饮料的箱数;(3)每20箱重新启动;(4)系统暂停10分钟后重新启动;(5)记录系统重新启动的次数;(6)记录时间。
3总体设计方案3.1计数传感器的选择根据流水线的工作实际情况,应该采用光电计数传感器,光电计数器是通过红外线发射和接收进行计数,有直射式和反射式两种,通常用于流水线的工件一车,显示包装好的饮料的车数,同时发出报警信号,显示可以装车;拓展部分(1)系统暂停10分钟后计数。
直射式的发射、接收分体,发射器和接收器分别置于流水线两边,中间没有阻挡时发射器的红外线射到接收器,接收器接收到发射来的红外线,经反相处理使之没有信号输出,有工件经过时挡住光路,接收器失去红外线信号便输出一个脉冲信号到运算累加器进行计数;反射式是发射、接收同体,置于流水线一边,前面流水线上没有东西时,发射器发出的红外线直接射出没有反射,接收器没有接收到反射来的红外线信号没有输出,有工件经过时挡住光路使发射器发出的红外线信号反射到接收器,接收器接收到反射来的红外线信号便输出一个脉冲信号到运算累加器进行计数。
根据实际情况来选用直射式或者反射式,总之检测到一个信号,就产生一个脉冲,从而对饮料瓶进行计数。
仿真时,可以用信号发生器代替即可。
对光电计数器接受的到脉冲信号,进行滤波等处理如图所示(3接输入)3.2显示器与警报装置显示器选用1602其接线图如下警报器装置线路图如下3.3控制系统主机可选用单片机电路本系统的控制主机选用单片机控制,对记录的饮料瓶数进行处理,外接有显示器,报警电路,输入模块,开关,复位电路,电源等3.4控制系统软件控制系统软件主要包括采样、计数、控制计算、控制输出、中断、计时、显示、报警等功能。
4软硬件设计4.1系统硬件设计根据系统的总体方案,可以画出控制系统的组成框图如下图中P1是串口,R5是上拉电阻4.2软件设计软件设计要求:用1602显示记录数据和时间,上一行显示瓶数A,箱数B,下一行显示车数C,重启次数D。
然后在达到一车报警LCD闪烁,箱数达到9590报警SPK响起,达到9600时系统停止,10分钟后重新启动,并记录重启次数D。
具体程序:#include<reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intsbit E=P2^3;sbit RW=P2^4;sbit RS=P2^5;sbit SPK=P1^2;sbit LED=P1^3;uint a,b,c,d,i;void delay_ms(uint z){uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}//毫秒延时void delay_m(uint z){uint x,y;for(x=z;x>0;x--)for(y=60;y>0;y--)delay_ms(1000);}//分钟延时void writeCom (uchar com){RS = 0; //将RS拉低,表示命令RW = 0; //将RW拉低,表示写操作E = 1; //芯片使能P0=com;delay_ms(1);E = 0;}//写入命令函数void writeData (uchar Data){RS = 1;//将RS拉高,表示数据RW = 0;//写操作E = 1;P0=Data;delay_ms(1);E = 0;}//写入数据函数void showChar (uchar pos,uchar c){uchar p;if (pos >= 0x10)p = pos + 0xb0; //是第二行则命令代码高4位为0xc elsep = pos + 0x80; //是第一行则命令代码高4位为0x8 writeCom(p);//写命令writeData(c); //写数据}//显示字符函数void showString (uchar line,char *ptr){uchar l,i;l = line << 4;for (i = 0; i < 16; i++)showChar(l++, *(ptr + i)); //循环显示16个字符}//显示字符串函数void writeMetre1(uchar add, int date){char qian,bai,shi, ge;qian=date/1000;bai=date%1000/100;shi=date%100/10;ge=date%10;writeCom(0x80+add);writeData(0x30 + qian);writeData(0x30 + bai);writeData(0x30 + shi);writeData(0x30 + ge);}//在第一行指定位置写入数据void writeMetre2(uchar add, int date){char qian,bai,shi, ge;qian=date/1000;bai=date%1000/100;shi=date%100/10;ge=date%10;writeCom(0x80+0x40+add);writeData(0x30 + qian);writeData(0x30 + bai);writeData(0x30 + shi);writeData(0x30 + ge);}//在第二行指定位置写入数据void initin(void){a=b=c=d=0;}//初始化输入值void initLCD (void){writeCom(0x38); //display modewriteCom(0x06); //显示光标移动位置 writeCom(0x0C); //显示开及光标设置 writeCom(0x01); //显示清屏delay_ms(5);showString(0,"A=0000 B=0000 ");showString(1,"C=0000 D=0000 "); }//初始化1602函数void init51 (void){EX0=1;//开外部中断0IT0=1;//外部中断0为下降沿触发SPK=1;//关蜂鸣器LED=1;//关LED灯EA=1;//开总中断}//初始化51void main(){init51 ();initLCD ();initin();while(1){if(i==0&&b!=0){LED=0;delay_ms(1000);LED=1;}if(a>9590){SPK=0;//溢出报警delay_ms(5);}}if(a>=9600){SPK=1;a=b=c=0;d++;delay_m(10);*/}}void count() interrupt 0 // using 1 {EX0=0;TH0=(65536-50000)/256;TL0=(65536-50000)%256;a++;b=a/24;c=b/20;i=b%20;writeMetre1(2, a);//写入瓶数writeMetre1(10, b);//写入箱数writeMetre2(2, c);//写入车数writeMetre2(10, d);//写入重启次if(i==0&&b!=0){LED=0;delay_ms(100);LED=1;}if(a>9590){SPK=0;//溢出报警delay_ms(5);}if(a>=9600){SPK=1;a=0;d++;delay_m(10);}EX0=1;}5课程设计实验(仿真部分)计数过程中等待重启过程用脉冲信号代替计数传感器,频率范围在1~100都可较好地实现计数功能,其中A表示瓶数,B表示箱数,C表示车数,D表示重启次数,R7左边的按键可实现整个系统重启,6调试或仿真过程中遇到的具体问题和解决的办法6.1 1602液晶无显示在仿真运行程序后,1602液晶没有显示,程序人在运行,原因是在写数据函数里没有加入数字0的ASCII码值,解决办法将writeData(qian)改为writeData(0x30 + qian)就可以了显示初始化的值了6.2 1602液晶无动态显示在仿真运行程序后,1602液晶有显示,但只是显示初始化的值A=0000 B=0000 C=0000 D=0000 ,外部中断0输入有值,但是1602不更新,后者有时候一下子跳到很高的一个值,跟输入不一致,解决办法,将1602液晶处理程序和显示程序都放到外部中断0的程序里面进行处理,1602液晶才开始有跟输入一致的更新显示6.2 在输入频率为一定的情况下1602液晶跟输入显示不跟濒临相同在仿真运行程序后,每次变化瓶数A都加25左右,改用按钮控制,每按一次,显示瓶数A变化8左右,长按按钮,瓶数A一直增加,,不按不加,解决办法,外部中断0的触发方式错了,将IT0=1,即可实现一比一变化。
7收获和体会本设计的目的主要是实现饮料瓶计数功能,能够很好地运用在一些大型饮料生产工厂中,可以大大地减少人员的工作量和人数,可以降低工厂生产成本,本设计还可以在重启过程中,利用一个控制流水线工作停止的数据,控制流水线的停止,更加完善了该系统,通过本次设计,学到了很多东西,首先就是51单片机的一些硬件的基本知识,还有51单片机的一些简单功能,学会了用C51编程,也学会了用KILE软件编程,仿真,通过对程序的一些调试,我也学会了一些基本的调试方法,通过实践,能够更加巩固前面学过的一些课本知识,更加深入理解,也深感自己的不足,在实验过程中遇到很多问题,通过翻阅书籍,自己去尝试,以及同学们的帮忙,都得到解决了,也让我发现了做设计的兴致所在。