树莓派引脚复用关系表___解释说明以及概述
手把手教你树莓派与ArduinoUno的对接(USB及GPIO方式)
手把手教你树莓派与ArduinoUno的对接(USB及GPIO方式)关于树莓派与Arduino Uno如何对接,网络上的资料很少,经本人研究三天终于成功了,总结个教程。
它们实现对接的方式至少有三种(USB方式对接、GPIO方式对接、 I2C方式对接、其他)。
本文介绍实现的也是亲测成功的前两种(USB对接,GPIO对接),本人也是初学者,老鸟可以绕道。
就以初学者方式说起一.先说必要的开发环境。
Arduino: 开发环境我是用arduino-0023 现在是arduino 1.0.5最新版本这两个主要是驱别是一些库文件被改动,网络上提供的教程一般都是以 arduino-0023 这个环境很简单,(你要是在淘宝上买Arduino UNO 卖家都会提供IDE与相应的开发教程)IDE下载地址/en/Main/SoftwareArduino与PC连接的USB驱动地址:PL2303_Prolific_DriverInstaller_v1.8.0.zip : /US/ShowProduct.aspx?p_id=225&pcid=41PL2303_Prolific_DriverInstaller_v1.5.0.zip : ftp:///public/DASGroup/products/OM-PL-USBS/PL2303_Prolific_DriverInstaller_v1.5.0.zip(如果连接失效请用迅雷下载或自己百度) 以上软件x86 x64都可以安装XP与WIN7都没问题,在WIN8 64下有可能遇到驱动无法使用问题,win8亲测可用,注意安装的时候以管理员身份win7兼容性运行,安装完成之后点击“更新驱动程序软件”才可用。
树莓派:开发环镜我用python 2.7(现在新系统都有自带这个),常用的两个库文件 RPi.GPIO与serial1.安装python(安装过的请跳到下一步): sudo aptitude install python-dev2.安装python的GPIO模块,用于控制LED、电机等(安装过的请跳到下一步)命令行下输入(一行一个命令)1.wget /files/RPi.GPIO-0.3.1a.tar.gz (下载GPIO库)2.tar xvzf RPi.GPIO-0.3.1a.tar.gz (tar解压)3.cd RPi.GPIO-0.3.1a (进入解压后的文件夹)4.sudo python setup.py install (安装GPIO库文件)复制代码要是看不懂上面的两点请移步到这/forum.php?mod=viewthread&tid=9393.安装serial,用于串口通信及USB通信:1.sudo apt-get install python-serial复制代码4.当然你要是想在树莓派装串口调试工具就装:1.sudo apt-get install minicom复制代码配置minicom:1.sudo minicom -s复制代码启动出现配置菜单:选serial port setup进入串口配置输入A 配置串口驱动为/dev/ttyAMA0输入E 配置速率为9600 8N1输入F 将 Hardware Flow Control 设为 NO回车退出由于我们使用minicom作为超级终端控制路由器等设备, 而不是控制modem, 所以需要修改Modem and dialing, 将Init string, Reset string, Hang-up string设置为空. 设置完成后选择Save setup as dfl将当前设置保存为默认设置. 在配置菜单选Save setup as df1保存(一定要记得这一步)选Exit退出下次在输入minicon 即可直接进入。
单片机引脚说明-按其引脚功能分为四部分叙述这40条引脚的功能

单片机引脚说明-按其引脚功能分为四部分叙述这40条引脚的功能下面按其引脚功能分为四部分叙述这40条引脚的功能。
1、主电源引脚VCC和VSSVCC——(40脚)接+5V电压;VSS——(20脚)接地。
2、外接晶体引脚XTAL1和XTAL2XTAL1(19脚)接外部晶体的一个引脚。
在单片机内部,它是一个反相放大器的输入端,这个放大器构成了片内振荡器。
当采用外部振荡器时,对HMOS单片机,此引脚应接地;对CHMOS单片机,此引脚作为驱动端。
XTAL2(18脚)接外晶体的另一端。
在单片机内部,接至上述振荡器的反相放大器的输出端。
采用外部振荡器时,对HMOS单片机,该引脚接外部振荡器的信号,即把外部振荡器的信号直接接到内部时钟发生器的输入端;对XHMOS,此引脚应悬浮。
3、控制或与其它电源复用引脚RST/VPD、ALE/PROG、PSEN和EA/VPP①RS T/VPD(9脚)当振荡器运行时,在此脚上出现两个机器周期的高电平将使单片机复位。
推荐在此引脚与VSS引脚之间连接一个约8.2k的下拉电阻,与VCC引脚之间连接一个约10μF的电容,以保证可靠地复位。
VCC掉电期间,此引脚可接上备用电源,以保证内部RAM的数据不丢失。
当VCC主电源下掉到低于规定的电平,而VPD在其规定的电压范围(5±0.5V)内,VPD就向内部RAM 提供备用电源。
②ALE/PROG(30脚):当访问外部存贮器时,ALE(允许地址锁存)的输出用于锁存地址的低位字节。
即使不访问外部存储器,ALE端仍以不变的频率周期性地出现正脉冲信号,此频率为振荡器频率的1/6。
因此,它可用作对外输出的时钟,或用于定时目的。
然而要注意的是,每当访问外部数据存储器时,将跳过一个ALE脉冲。
ALE端可以驱动(吸收或输出电流)8个LS型的TTL输入电路。
对于EPROM单片机(如8751),在EPROM编程期间,此引脚用于输入编程脉冲(PROG)。
③PSEN(29脚):此脚的输出是外部程序存储器的读选通信号。
【.NET与树莓派】i2c(IIC)通信
【.NET与树莓派】i2c(IIC)通信i2c(或IIC)协议使⽤两根线进⾏通信(不包括电源正负极),它们分别为:1、SDA:数据线,IIC 协议允许在单根数据线上进⾏双向通信——这条线既可以发送数据,也可以接收数据。
2、SCL:时钟线,注意了,这个时钟线跟我们平时所说的时钟没什么关系,不要以为这根线是⽤来接⼿表的。
其实,这⾥所说的“时钟”,更像是我们看⾳乐会的时候,站在前⾯最中央处的那个指挥者,或者说节拍器。
它的作⽤就是协调硬件之间的传输节奏,做到步伐⼀致,不然数据就会乱了。
⽐如,IIC通信⾥⾯,当时钟线的电平拉⾼后,数据线的内容就不能改变,也就是说,SCL⾼电平时,不能写数据,但可以读。
当SCL下降为低电平后,才能向数据线(SDA)写⼊数据。
IIC 通信以 Start 信号开始,以 Stop 信号结束。
传送开始信号的⽅法:拉⾼SCL和SDA的电平,在SCL处于⾼电平的情况下把SDA的电平拉低。
传送结束信号的⽅法:拉⾼SCL的电平,在SCL处于⾼电平的情况下,把SDA的电平拉⾼。
这其中,你会发现规律:⽆论是开始信号还是结束信号,SCL 都处于⾼电平,前⽂提过,时钟线拉⾼就是固定数据线上的内容,显然,在开始和结束信号中,是不能传数据的。
在SDA上,开始信号和结束信号刚好相反,Start 时电平拉低,Stop 时电平拉⾼。
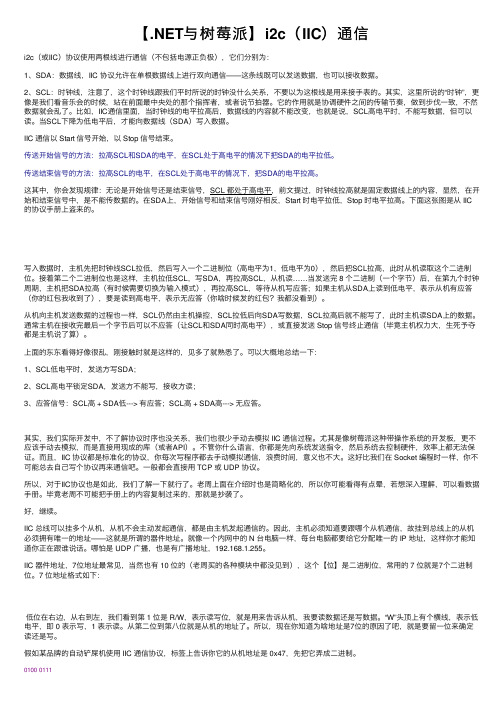
下⾯这张图是从 IIC 的协议⼿册上盗来的。
写⼊数据时,主机先把时钟线SCL拉低,然后写⼊⼀个⼆进制位(⾼电平为1,低电平为0),然后把SCL拉⾼,此时从机读取这个⼆进制位。
接着第⼆个⼆进制位也是这样,主机拉低SCL,写SDA,再拉⾼SCL,从机读……当发送完 8 个⼆进制(⼀个字节)后,在第九个时钟周期,主机把SDA拉⾼(有时候需要切换为输⼊模式),再拉⾼SCL,等待从机写应答;如果主机从SDA上读到低电平,表⽰从机有应答(你的红包我收到了),要是读到⾼电平,表⽰⽆应答(你啥时候发的红包?我都没看到)。
树莓派的入门配置

树莓派新版-入门配置来源:网络编辑:admin如果你有密集恐惧症那么只需要看标题和字体加粗局部.有下划线的是都可以点开的.Linux系统分支有很多国常用的分支主要是:1.Debian2.Redhat参考:GNU/Linux发行版历年分支进化图一览.目前桌面版Debian分支相比要做的好点,效劳器端肯定是Redhat分支了,因为树莓派硬件是基于ARM的,所以在树莓派官网也有针对其的编译版.RASPBIAN 对应debianPIDORA 对应Redhat下的Fedora分支好了废话不多说,正文开场.1.系统安装写入SD卡a)在官网下载 RASPBIAN的镜像,点击前面的下载,最新版本有900多M,下载后解压文件.b)这里推荐使用Win32DiskImager这款软件来将树莓派系统写入到SD卡c)然后将SD卡插入树莓派,并且连接上网线和电源.2.使用raspi-config工具配置树莓派a)查看ip正常情况下树莓派就可以启动了,但是现在还不知道他的IP,无法用ssh的方式进入系统,如果会用路由器查看ip的朋友就不是事,如果不会的可以使用Advanced IP scanner这款软件查看.b)系统配置知道IP了就可以进入系统配置了树莓派的默认账号是pi,默认密码是raspberry.SSH进入后输入sudo raspi-config这个命令会弹出这个命令行配置界面1 Expand Filesystem扩展文件系统按回车即可.(将SD卡利用率最大化).2 Change User Password改变默认pi用户的密码.3 Enable Boot to Desktop/Scratch启动时进入的环境选择Console Text console, requiring login(default)启动时进入字符控制台,需要进展登录〔默认项〕Desktop log in as user "pi" at the graphical desktop启动时进入LXDE图形界面的桌面Scratch Start the Scratch programming environment upon boot启动时进入Scratch编程环境,进入后,可以点File->Exit退出,然后在退出过程中按Ctrl+C进入控制台。
OBD_pi_树莓派配件用户手册

gk_um001gk bed OBD_pi硬件用户手册V0.1MAR.2020Taobao shop:gk bed1.简介OBD_pi是专为树莓派开发的一款配件电路板。
采用无铅工艺,注重环保,关注用户健康。
电路板主要应用于汽车电子方面。
比如全液晶仪表,网关等。
基于此场景,OBD_pi电路板硬件资源:(1)12V电源(2)一路CAN总线通信(3)RTC时钟年历(4)RTC备用可充电锂离子电池(5)一个充电指示LED(6)一个用户LED(7)四路12bit的ADC(8)(Ain0外部模拟量采样(9)Ain1RTC备用锂电池电压采样,(10)Ain2板载NTC温度传感器,(11)Ain312V电源电压采样)(12)2个轻触按键(13)2路12V数字输入(光耦隔离)(14)1路12V@0.5A输出。
2.硬件资源电路详细说明1.112V电源DCDC5V1.1.1DCDC电源采用MP1482输入电压:8~18V输出电压5V额定电流2A关断模式下漏电流1uA1.1.2使能和关断功能如下图,DCDC电路可通过KEY_ON(汽车钥匙开关)信号使能或者关断树莓派的GPIO22(Pin15)使能或者关断注意:KEY_ON信号和12V电源输入信号在板上通过JP1连接。
如果需要单独使用KEY_ON信号,请使用美工刀割断JP1。
KEY_ON信号和GPIO22配合使用可用作钥匙关断的断电存储有用数据和软件关机。
1.2CAN总线1.2.1通过SPI扩展的can总线通信(MCP2515)Can2.0B1Mbps0~8字节数据域标准,扩展的数据帧,远程帧120欧姆的终端可根据需要断开或者连接,切断或者焊接JP2。
1.3RTC时钟年历1.3.1RTC使用NXP的PCF8563支持年,月,日,周,时,分,秒待机模式下低功耗0.5uA50mAh备用锂电池为了保护锂电池的寿命,电路板最好不要闲置半年以上,经常拿出来用用。
使用电路板的时候,锂电池自动充电。
树莓派如何采集RS485数据
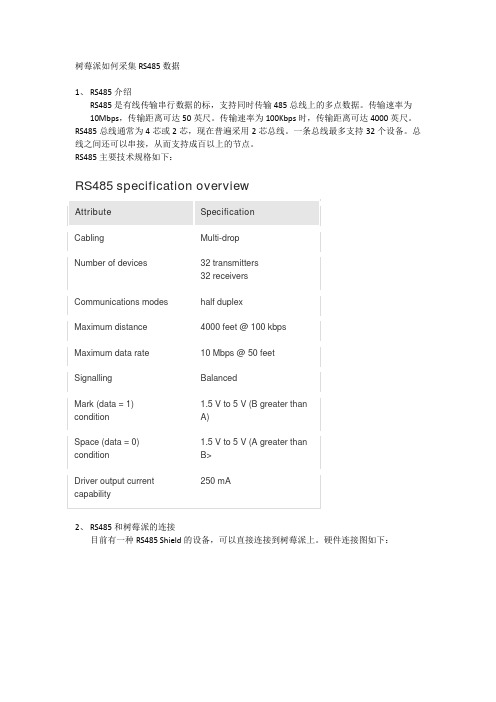
树莓派如何采集RS485数据1、RS485介绍RS485是有线传输串行数据的标,支持同时传输485总线上的多点数据。
传输速率为10Mbps,传输距离可达50英尺。
传输速率为100Kbps时,传输距离可达4000英尺。
RS485总线通常为4芯或2芯,现在普遍采用2芯总线。
一条总线最多支持32个设备。
总线之间还可以串接,从而支持成百以上的节点。
RS485主要技术规格如下:2、RS485和树莓派的连接目前有一种RS485 Shield的设备,可以直接连接到树莓派上。
硬件连接图如下:3、配置Update source list$ sudo apt-get updateInstall python-pip$ sudo apt-get install python-pipUse pip to install WiringPi (WiringPi is designed for raspberry pi to behave similarly to that of the wiring library under Arduino. After this library is installed,c or shell or python can usethe function to configure and control GPIOs directly. :$ sudo pip install wiringpiInstalled the associated library files of serial ports :$ sudo apt-get install python-serial.Test whether the GPIO library and the serial library is installed or not:$ python$ import RPi.GPIO$ import serialIf there is no error , then the two libraries are installed correctly.We need to configure file …/boot/cmdline.txt‟ to remove the kernel booting information and debug message:$ sudo nano / boot / cmdline.txtYou can see the following information:dwc_otg.lpm_enable = 0 console = ttyAMA0, 115200 kgdboc = ttyAMA0, 115200 console = tty1 root = / dev/mmcblk0p2 rootfstype = ext4 elevator = deadline rootwaitRemove “console = ttyAMA0, 115200 kgdboc = ttyAMA0, 115200″ so that the informationbecomes:dwc_otg.lpm_enable = 0 console = tty1 root = / dev/mmcblk0p2 rootfstype = ext4 elevator = deadline rootwaitDisable log in from the serial port:$ sudo nano / etc / inittaband comment out ” T0: 23: respawn :/ sbin / getty-L ttyAMA0 115200 vt100″Restart Raspberry Pi:$ sudo rebootNow you can use / dev/ttyAMA0 like the regular COM port.4、测试代码Test code(serial_test.py) :1 2 3 4 5 6 7 8 910111213 import serialport = ”/dev/ttyAMA0″usart = serial.Serial(port,9600)usart.flushInput()print (“serial test: BaudRate = 9600″) usart.write(“please enter the character:\r”) while True:141516171819202122232425if( usart.inWaiting()>0) :receive = usart.read(1)print ”receive: ”,receiveusart.write(“send: ’”) usart.write(receive)usart.write(“‘\r”)6、基于RS232转RS485的测试例程硬件连接方式:硬件管脚对应关系:RS485 Shield …A‟-> RS232-RS485 converter … T/R + …RS485 Shield …B‟-> RS232-RS485 converter … T/R- …RS485 Shield …GND‟ -> RS232-RS485 converter‟ GND …After the wiring is done, launch a serial terminal. We use X-CTU in our case, and set the baud rate to 9600After running serial_test.py, enter the characters in the X-CTU:。
树莓派GPIO详细介绍与使用

树莓派GPIO详细介绍与使⽤树莓派介绍Raspberry Pi(中⽂名为“树莓派”,简写为RPi,(或者RasPi / RPI) [1] 是为学习计算机编程教育⽽设计),只有信⽤卡⼤⼩的微型电脑,其系统基于。
GPIO树莓派总共40个引脚40根引脚有不同的编号规则来定义,虽然不同的规则叫的名字不⼀样,但实际的⽤途是⼀致的,这⾥只学习⼀种编号规则,也就是物理位置编号,这样更容易进⾏物理连接。
⽐如:1号引脚,是输出1个3.3伏的电压,也就是如果⽤数字万⽤表去测量这根引脚的电压,会⼀直测出来是⼀个恒定并且不能变化的3.3伏。
2号与4号引脚相同,只不过输出的是5伏的电压。
6号引脚,是⼀个GND,也就是接地,如果测量电压的话,就是0伏。
(9、14、20、25、30、34、39相同)11号引脚,是绿⾊图标,其实这个接⼝就是普通的接⼝,可以输⼊也可以输出。
如果设置为输出,则可以输出⾼电压或者低电压。
输出⾼电压就是3.3伏,输出低电压就是0伏。
可以通过程序来控制。
控制GPIO ⽅法⼀通过终端命令cd /sys/class/gpio # 进⼊ GPIO ⽬录ls # 查看GPIO⽬录中的内容# GPIO 操作接⼝从内核空间暴露到⽤户空间echo BCM引脚编码 > export # 例如 echo 26 > export 执⾏之后该⽬录下会增加⼀个引脚⽂件ls这时候会看到⽬录下会出现⼀个gpio26的⽬录cd gpio26进⼊⽬录后就可以通过终端命令控制引脚了控制GPIO ⽅法⼆通过Python控制import RPi.GPIO as GPIOimport timeGPIO.setmode(GPIO.BCM) # 采⽤BCM编码GPIO.setup(18, GPIO.OUT)for i in range(1,100):GPIO.output(18, GPIO.HIGH)time.sleep(0.5)GPIO.output(18, GPIO.LOW)time.sleep(0.5)GPIO.cleanup()如果遇到这个警告可以忽略RuntimeWarning: This channel is already in use, continuing anyway. Use GPIO.setwarnings(False) to disable warnings.控制GPIO ⽅法三通过C语⾔控制#include<wiringPi.h>#define Pin 25int mian(){if(wiringPiSetup() < 0)return1;pinMode(Pin,OUTPUT);for(int i=0;i<30;i++){digitalWrite(Pin,1);delay(200);digitalWrite(Pin,0);delay(200);}return 0;}编译运⾏gcc -o ⽂件名⽂件名.c -lwiringPisudo ./⽂件名树莓派遇到的问题gpio readall 未找到命令原因是缺少[[wiringPi]]库树莓派4 ⾃带的 wiringPi 库默认是 2.50 ,⽆法映射到 gpio ,所以需要更新到 2.52及以上才能与树莓派映射。
树莓派 入门使用手册 官方屏一体机入门手册

Raspberry Pi 3官方套件入门指南(Rev.A)i目录第1章 (1)Raspberry PI 3官方套件介绍 (1)1.1产品概述 (1)1.1.1Raspberry Pi 3套件特点 (1)1.1.2Raspberry Pi 3套件介绍 (2)1.2技术支持及详细资料 (4)第2章 (5)Raspberry Pi 3官方套件安装 (5)2.1R ASPBERRY P I 3套件软件系统安装 (5)2.1.1.SD卡安装NOOBS系统 (5)2.1.2.SD卡安装Raspbian系统 (7)2.1.3.旋转屏显 (8)2.2R ASPBERRY P I 3套件硬件安装 (8)2.2.1安装散热片 (9)2.2.2安装SD卡 (9)2.2.3安装触摸屏 (9)2.2.4安装外壳 (12)2.2.5电源连接 (13)第3章 (14)Raspberry Pi 3套件的软件入门操作 (14)3.1R ASPBERRY P I 3套件软件操作准备工作 (14)3.1.1上电准备 (14)3.1.2旋转屏显 (14)3.2R ASPBERRY P I 3网络连接 (15)3.2.1有线网络连接 (15)3.2.2WiFi网络连接 (16)3.3R ASPBERRY P I 3系统更新及升级 (16)3.3.1更新系统 (16)3.3.2升级系统 (17)3.3.3查看SD卡的空间 (17)3.4R ASPBERRY P I 3安装其他应用文件 (17)附录A (18)Raspberry Pi 3 GPIO定义 (18)A.140PIN GPIO定义 (18)第1章Raspberry PI 3官方套件介绍1.1 产品概述Rasapberry Pi(中译:树莓派)是能够和一个键盘一起插入你的电视的信用卡大小的电脑。
这是一个性能足够强的小电脑,可以在电子工程中使用,并且能够做许多台式电脑做的事情,比如制作电子表格,处理文档和玩游戏。
树莓派 2B 使用手册资料

树莓派2B 使用手册特别告示:A、树莓派只能使用5V 电源,若大于5V 必定致树莓派烧毁!B、还原TF 卡需下载SD格式化工具格式化TF卡,而不是简单的在Windows 下格式化,否则可能损坏TF 卡。
树莓派相关接口布局的认识:一、安装系统(本步骤在Windows 系统的pc 上操作而非树莓派。
本教程默认使用官方推荐系统——raspbian。
其它系统请自行尝试和折腾。
)1、Raspbian 下载,地址:/downloads/ (树莓派2B 必须使用2015 年 1 月31 日及之后的版本,否则不能用),解压缩到PC 上没有中文字符的文件夹下(即:如下图红框内,路径不能有中文或者特殊字符),得到.img 镜像文件2、下载镜像安装工具win32 disk imager: /aKtGY ,解压缩到PC上:3、将TF 卡(最少8G 容量)插入读卡器(别用笔记本自带卡槽,否则刷的系统极可能不完整,存在问题),在PC 上打开win32diskimager.exe,如上图;点击按钮1,选择第1 步得到的img 镜像文件;点击按钮2 选择TF 卡的盘符;点击按钮3(write)开始给TF 卡写入系统,其中会提示对话框,点YES 即可;点击按钮4(read)是备份(导出)TF 卡已装系统。
装系统由TF 卡写入速度决定,8 分钟左右。
系统安装成功后会提示“Write Successful”(装系统时勿做其他操作,存在系统写入失败损坏TF 卡的可能)。
此时关闭imager 工具,但别拔出TF 卡。
这时TF 卡只显示剩下几十M,正常的!这是由于TF 卡在装了Linux 系统后,分为三种格式,其中只有一种格式能被Windows 系统识别,也就是剩下那几十M。
二、系统配置1)、注意:若使用A V(RCA)接口电视,本步骤可忽略,但2B 须使用“3.5mm 转接头转换后”才可正常使用。
2)、HDMI、DVI 或VGA 接口显示器用户需要修改配置文件:在PC 上进入TF 卡,并找到文件config.txt,使用3、Notepad++(下载:/pVN9A )工具打开,依次将下面项目的“值”修改为等号后的数值,并去掉前面的“#”:hdmi_force_hotplug=1hdmi_gryuoup=2hdmi_mode=16hdmi_drive=2config_hdmi_boost=4sdtv_mode=2arm_freq=800项目释义:hdmi_mode=16 是分辨率修改项,通常为4、9、16;hdmi_drive=2,表示音频从HDMI 接口输出;arm_freq=800 为调频项,可为900、1000,修改前请务必做好散热准备,谨慎尝试,后果自负。
树莓派HiFi DAC扩展板说明书
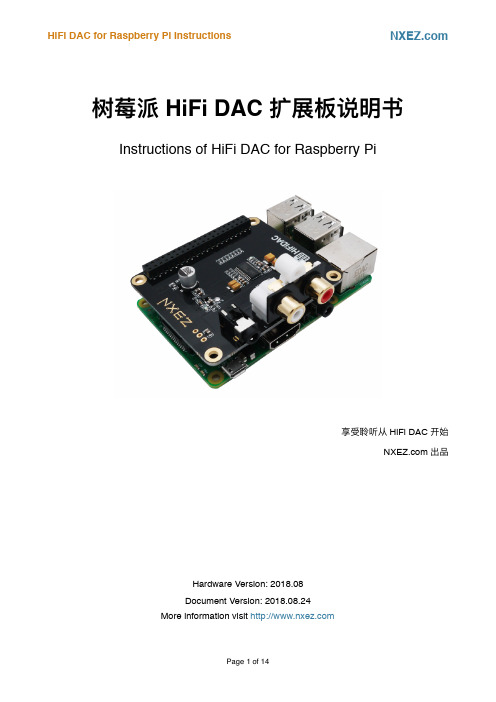
树莓派 HiFi DAC 扩展板说明书Instructions of HiFi DAC for Raspberry Pi享受聆听从 HiFi DAC 开始 出品Hardware Version: 2018.08Document Version: 2018.08.24More information visit 产品介绍树莓派 HIFi DAC 扩展板集成了了 TI 公司专业的⾳音频解码芯⽚片 PCM5122,采⽤用 I2S 接⼝口标准整合 了了⼀一套基于树莓派的完善的⾳音频硬件解码系统。
并⽀支持 Volumio 、RuneAudio 、OSMC 等功能强⼤大 的播放软件,是快速搭建树莓派 HiFi 系统的不不⼆二之选!本产品完美适配于树莓派,可兼容树莓派1代A+、B+,树莓派2B ,树莓派3B 、B+,树莓派Zero 、Zero W ,以及后续对该标准兼容的树莓派系列列硬件,为了了确保可⽤用性,建议在带有⽆无线⽹网卡的树莓派上使⽤用。
硬件示意图:1.40Pin 排针插座(默认带短针,可根据需要购买⻓长针)2. 3.5MM ⾳音频接⼝口3.RCA 莲花⾳音频插座(标准版不不带此接⼝口,购买时选择)4.预留留红外线接收头焊点(根据需要⾃自⾏行行添加 VS1838B 接收头)5.电源指示灯6.DAC 运⾏行行指示灯标准版正⾯面带莲花插座版与树莓派组装图312456组合式的⻓长短排针插座设计,可选⻓长针、短针⾃自由拆装。
可根据需要使⽤用⻓长针排针插座,引出树莓派的 GPIO 引脚,叠加安装其他扩展板或使⽤用杜邦线扩展功能。
分别安装效果如图。
⻓长针排针插座安装效果可叠加其他功能相兼容的扩展板使⽤用,仅作安装示意。
⻓长针排针插座短针排针插座从扩展板背⾯面向正⾯面插⼊入短针排针插座安装效果特⾊色采⽤用 TI 公司专业⾳音频解码芯⽚片 PCM5122,⽀支持⾼高达 32bit/384kHz 的采样率,动态范围 112dB,失真度 -93db。
树莓派开发手册_概述及范文模板

树莓派开发手册概述及范文模板1. 引言1.1 概述树莓派是一款基于Linux操作系统的微型计算机,以其低成本、低功耗和易于开发等特点,被广泛应用于教育、科研、物联网等领域。
本篇文章旨在介绍树莓派的基本概念、开发环境搭建以及树莓派在不同领域的应用案例分析,并对未来树莓派应用进行展望。
1.2 文章结构本文将按照以下目录结构进行介绍:- 引言:对文章的概述及目的进行阐述;- 树莓派的基本概念:介绍树莓派的背景和主要硬件组成,以及支持树莓派开发所需的软件;- 开发环境搭建:详细讲解如何准备工作并成功安装和配置树莓派系统,同时选择合适的开发工具;- 树莓派应用案例分析:通过具体的实例,探讨了家庭娱乐系统搭建、物联网设备控制平台开发以及科学实验项目实施等树莓派应用案例;- 结论与展望:总结本文的主要内容,同时对未来树莓派应用进行展望和思考。
1.3 目的本文的目的是为读者提供一份全面而实用的树莓派开发手册,帮助他们了解树莓派的基本概念、学会搭建开发环境,并通过实际案例分析,启发读者对树莓派应用的创造力和思考能力。
此外,文章还将对未来树莓派应用进行展望,为读者提供更多想象空间和研究方向。
通过阅读本文,读者将能够全面了解并掌握树莓派的开发技巧和应用方法。
2. 树莓派的基本概念:2.1 介绍树莓派:树莓派是一款小型的、低成本的计算机,其目标是为人们提供一个学习编程和电子技术的平台。
树莓派由英国的树莓派基金会开发,通过其简单易用的硬件和软件接口,使得用户能够轻松地进行各种创造性和教育性项目的开发。
2.2 硬件组成:树莓派主板是整个系统的核心部分,通常采用ARM架构处理器。
其它组成部分包括内存、存储器、网络接口、GPIO(通用输入输出)引脚等。
这些硬件组件可以通过引脚间连接或外设扩展板进行扩展。
2.3 软件支持:树莓派采用Linux操作系统作为主要软件支持。
用户可以选择安装不同版本的Linux发行版,如Raspbian、Ubuntu Mate等。
74HC595引脚和原理说明
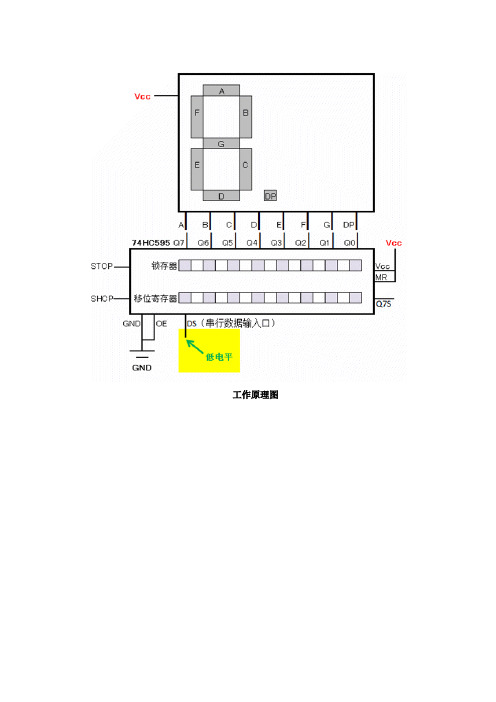
工作原理图▪GND接地,VCC接5V电源,这个就不用说了。
▪Q0-Q7这8根引脚是芯片的输出引脚,直接跟数码管的8段引脚相连。
对应关系要看你怎么接线和写代码时传送数据的顺序了。
▪DS是串行输入引脚,所谓串行就是使数据在一根信号线上按顺序一位一位地传输,就像一串糖葫芦。
这个引脚我们接到树莓派任意一个GPIO口上(输出模式)。
▪SHCP是移位寄存器的时钟引脚。
听上去有点复杂,其实很简单。
74HC595内部有一个8位的移位寄存器用来保存从DS引脚输入的数据。
那么74HC595怎么知道什么时候该从DS引脚上取数据了呢?正是通过SHCP这个时钟引脚来实现的。
只有在SHCP发生一次上升沿的时候,74HC595才会从DS引脚上取得当前的数据(高/低电平)并把取到的这一位数据保存到移位寄存器里。
同样的,这个引脚也接到树莓派任意一个GPIO口上。
当我们向芯片发送数据时,要先在DS引脚上准备好要传送的数据,然后制造一次SHCP引脚的上升沿(先拉低电平再拉高电平),74HC595会在这个上升沿将DS引脚上的数据存入移位寄存器D0,同时D0原来的数据会顺移到D1,D1的数据位移到D2。
D6的数据位移到D7。
而原先D7的数据已经没有地方储存了,这一位数据会被输出到引脚Q7S上。
这个引脚的作用我们下一篇再说,本文暂时用不到这个引脚。
(注意这里说的不是输出引脚Q0-Q7,而是指内部的8位移位寄存器里每一个“小房间”,芯片手册上并没有给这些小房间编号,这里为了说明方便进行了编号)▪STCP是芯片内部另外一个8位锁存寄存器的时钟引脚。
当移位寄存器的8位数据全部传输完毕后,制造一次锁存器时钟引脚的上升沿(先拉低电平再拉高电平)。
74HC595会在这个上升沿将移位寄存器里的8位数据复制到锁存器中(锁存器里原来的数据将被替换)。
注意,到这里为止,这8位数据还只是被保存在锁存器里,并没有输出到数码管上。
这个引脚同样连接到树莓派任意一个GPIO口上即可。
gpio编程说明 -回复

gpio编程说明-回复GPIO编程是指通过控制树莓派(Raspberry Pi)的通用输入输出端口(GPIO)来实现与外部设备(如传感器、执行器等)的交互。
在树莓派上进行GPIO编程可以让我们通过程序控制硬件,从而实现各种功能,如控制LED灯、读取按钮输入、采集环境数据等。
本文将以中括号内的内容为主题,详细介绍GPIO编程的基本概念、使用方法和注意事项。
一、基本概念1. GPIO引脚GPIO引脚是树莓派上可编程的数字输入输出引脚。
树莓派一般有多个GPIO引脚可供使用,每个引脚都可以通过程序来配置和控制。
GPIO引脚既可以作为输入接口接收外部信号,也可以作为输出接口输出电平信号。
2. 控制IO口电平GPIO引脚的电平即为其上的电压状态,一般有高电平和低电平两种状态。
高电平一般表示为1,低电平一般表示为0。
通过控制GPIO引脚的电平状态可以实现与外部设备的通信和交互。
3. 电平转换电路在实际应用中,外部设备的电平状态和树莓派的GPIO引脚的电平状态可能不一致,因此需要通过电平转换电路来匹配两者之间的电平差异。
常用的电平转换电路有电阻分压电路和三极管电路等,具体根据应用需求选择适当的电平转换电路。
二、GPIO编程方法在树莓派上进行GPIO编程主要有两种方法,一种是使用系统的IO库,如wiringPi库,另一种是使用Python语言的RPi.GPIO库。
下面将详细介绍这两种方法的使用。
1. 使用wiringPi库进行GPIO编程wiringPi是一款广泛应用的树莓派GPIO编程库,提供了丰富的API函数,简化了GPIO的配置和控制过程。
使用wiringPi库,需要先在树莓派上安装该库,然后在程序中包含相关头文件,并链接库文件,最后进行GPIO 的配置和控制操作。
2. 使用RPi.GPIO库进行GPIO编程RPi.GPIO是树莓派上广泛使用的Python GPIO编程库,使用该库可以简便地在Python语言下进行GPIO编程。
Raspberry Pi GPIO的编号规范
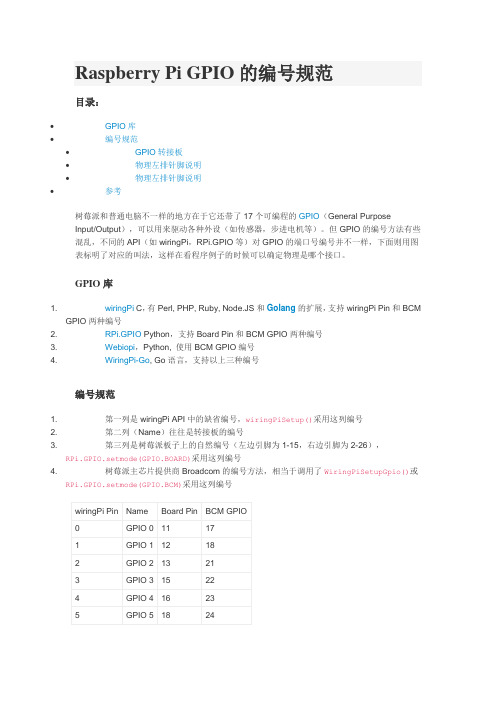
Raspberry Pi GPIO的编号规范目录:∙GPIO库∙编号规范∙GPIO转接板∙物理左排针脚说明∙物理左排针脚说明∙参考树莓派和普通电脑不一样的地方在于它还带了17个可编程的GPIO(General PurposeInput/Output),可以用来驱动各种外设(如传感器,步进电机等)。
但GPIO的编号方法有些混乱,不同的API(如wiringPi,RPi.GPIO等)对GPIO的端口号编号并不一样,下面则用图表标明了对应的叫法,这样在看程序例子的时候可以确定物理是哪个接口。
GPIO库1.wiringPi C,有Perl, PHP, Ruby, Node.JS和Golang的扩展,支持wiringPi Pin和BCMGPIO两种编号2.RPi.GPIO Python,支持Board Pin和BCM GPIO两种编号3.Webiopi,Python, 使用BCM GPIO编号4.WiringPi-Go, Go语言,支持以上三种编号编号规范1.第一列是wiringPi API中的缺省编号,wiringPiSetup()采用这列编号2.第二列(Name)往往是转接板的编号3.第三列是树莓派板子上的自然编号(左边引脚为1-15,右边引脚为2-26),RPi.GPIO.setmode(GPIO.BOARD)采用这列编号4.树莓派主芯片提供商Broadcom的编号方法,相当于调用了WiringPiSetupGpio()或RPi.GPIO.setmode(GPIO.BCM)采用这列编号GPIO转接板GPIO转接板通过彩虹排线可将树莓派的GPIO引脚转接到面包板上,方便试验,下图是一个相应的产品,可以看到每个引脚标都已标注好了名称,查上表就知道代码里该用哪个编号做参数了。
all the UART, SPI and I2C pins can be reconfigured as GPIO if needed.。
树莓派引脚及接口图AV接口顺序
树莓派 引脚图
树莓派引脚及接口图 AV接口顺序
注:本表格适用于各版本,并且兼容26Pin的树莓派B,树莓派B为26Pin,其引脚对应于上表的前26Pin。
树莓派 接口图
AV接口又称(RCA),AV接口算是出现比较早的一种接口,它由黄、白、红三种颜色的线组成,其中黄线为视频,红色为左声道,白色为 右声道。
树莓派LED显示时引脚输入信号问题
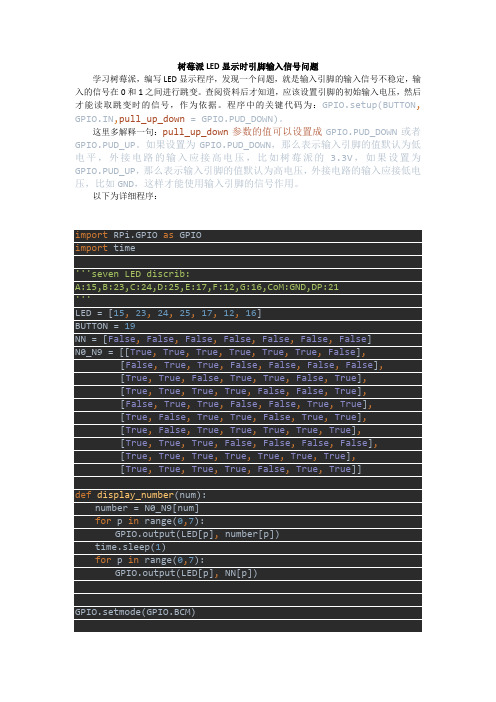
树莓派LED显示时引脚输入信号问题学习树莓派,编写LED显示程序,发现一个问题,就是输入引脚的输入信号不稳定,输入的信号在0和1之间进行跳变。
查阅资料后才知道,应该设置引脚的初始输入电压,然后才能读取跳变时的信号,作为依据。
程序中的关键代码为:GPIO.setup(BUTTON, GPIO.IN,pull_up_down = GPIO.PUD_DOWN)。
这里多解释一句:pull_up_down参数的值可以设置成GPIO.PUD_DOWN或者GPIO.PUD_UP。
如果设置为GPIO.PUD_DOWN,那么表示输入引脚的值默认为低电平,外接电路的输入应接高电压,比如树莓派的 3.3V,如果设置为GPIO.PUD_UP,那么表示输入引脚的值默认为高电压,外接电路的输入应接低电压,比如GND,这样才能使用输入引脚的信号作用。
以下为详细程序:import RPi.GPIO as GPIOimport time'''seven LED discrib:A:15,B:23,C:24,D:25,E:17,F:12,G:16,CoM:GND,DP:21'''LED = [15, 23, 24, 25, 17, 12, 16]BUTTON = 19NN = [False, False, False, False, False, False, False]N0_N9 = [[True, True, True, True, True, True, False],[False, True, True, False, False, False, False],[True, True, False, True, True, False, True],[True, True, True, True, False, False, True],[False, True, True, False, False, True, True],[True, False, True, True, False, True, True],[True, False, True, True, True, True, True],[True, True, True, False, False, False, False],[True, True, True, True, True, True, True],[True, True, True, True, False, True, True]]def display_number(num):number = N0_N9[num]for p in range(0,7):GPIO.output(LED[p], number[p])time.sleep(1)for p in range(0,7):GPIO.output(LED[p], NN[p])GPIO.setmode(GPIO.BCM)for p in range(0,7):GPIO.setup(LED[p], GPIO.OUT)GPIO.setup(BUTTON, GPIO.IN,pull_up_down = GPIO.PUD_DOWN) SIGN = Truetry:while(SIGN):time.sleep(0.2)print(GPIO.input(BUTTON))if GPIO.input(BUTTON) == True:for n in range(9,-1,-1):display_number(n)SIGN = Falsefinally:GPIO.cleanup()。
树莓派无人机飞控pxfplus用户说明
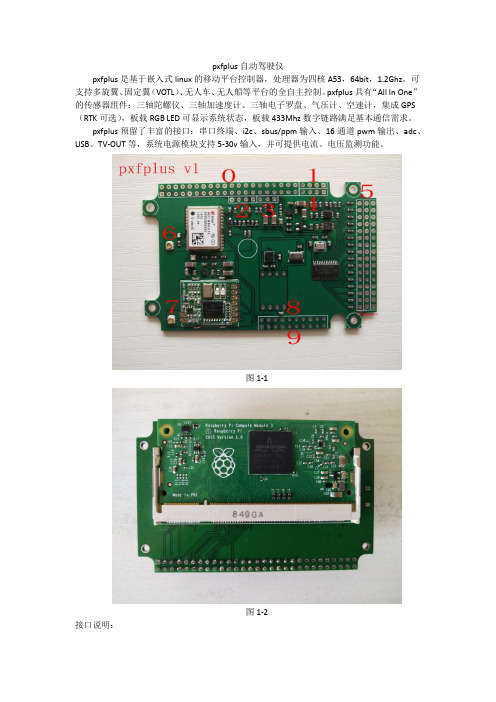
pxfplus自动驾驶仪pxfplus是基于嵌入式linux的移动平台控制器,处理器为四核A53,64bit,1.2Ghz。
可支持多旋翼、固定翼(VOTL)、无人车、无人船等平台的全自主控制。
pxfplus具有“All In One”的传感器组件:三轴陀螺仪、三轴加速度计、三轴电子罗盘、气压计、空速计,集成GPS (RTK可选),板载RGB LED可显示系统状态,板载433Mhz数字链路满足基本通信需求。
pxfplus预留了丰富的接口:串口终端、i2c、sbus/ppm输入、16通道pwm输出、adc、USB、TV-OUT等,系统电源模块支持5-30v输入,并可提供电流、电压监测功能。
图1-1图1-2接口说明:0:兼容树莓派3B引脚,从左到右依次是2*20 pin,见附录;1:i2c引脚,从左到右依次是GND、SDA、SCL、+5v;2:系统电源引脚,从左到右依次是GND、CURR、VOLT、+5v,其中CURR是电流检测引脚,VOLT是电压检测引脚;3:sbus/ppm信号输入引脚,从左到右依次是GND、+5v、S;4:串口终端,从左到右依次是GND、RX、TX、+5v;5:16通道pwm输出,从左到右依次是pwm信号、+5v、-,从下到上依次是pwm通道1-16,注意伺服通道+5v内部连接,但不给系统供电,系统会采集伺服电压,-和系统GND 相连接;6:GPS天线端子;7:433MHz电台天线端子;8:系统接线,从左到右依次是:+5v、RX2、TX2、GND,此串口连接GPS;+5v、USB_DM4、USB_DP4、GND,USB接口,无连接,用户可连接USB设备;GND、+5v、ADC_IN3;9、系统接线,从左到右依次是+5v、RX1、TX1、GND,此串口连接433MHz电台;+5v、USB_DM3、USB_DP3、GND,USB接口,无连接,用户可连接USB设备;GND、+5v、TV_ADC;外设说明:Pxfplus系统包含主控、电源模块、433电台、433天线、GPS天线等组件,如图所示:图2-1安装说明:图3-11、飞控平台应该安装减震,气压计表面应该用透气海绵覆盖;2、将两个天线分别插入天线座,GPS是有源天线,433天线是螺旋天线,天线应安放稳妥;3、伺服信号线顺序如图1,电机顺序如图2-1,1、2号电机逆时针旋转,3、4电机顺时针旋转;4、电源模块输出四根线依次:红色+5v,白色CURR,白色VOLT,黑色GND,和主控对应,不能反插,会烧坏主控;运行说明:1、系统上电后自动运行飞控程序,默认为四轴固件;2、使用串口模块,配合SecureCRT可以登录系统,初始用户为pi,密码respberry;3、登录系统后用户可以手动选择其他固件;校准说明:1、使用MP地面站连接飞控,需要安装电台串口驱动,波特率为115200;2、接收机支持PPM、SBus接收机,主控会给接收机供电;3、其他校准可参考APM;操作说明1、校准完成后,可以通过遥控器或者地面站解锁,解锁后电机默认低速旋转;2、解锁方式参考APM;附录:1、安装树莓派系统镜像a)推荐使用emlid系统镜像,已经打好实时补丁;b)准备一台linux系统主机(开发板),要带usb接口,虚拟机识别不了USB驱动;c)未完。
GPIO复用功能解释
STM32的功能引脚重映射和复用功能GPIO的基本功能是普通的I/O。
而STM32有自己的各个功能模块,这些内置外设的外部引脚是与标准GPIO复用的,当作为这些模块的功能引脚时就叫复用。
Stm32的引脚一般应用:模拟输入_AIN ——应用ADC模拟输入,或者低功耗下省电。
浮空输入_IN_FLOATING ——可以做KEY识别,RX1开漏输出_Out_OD——应用于I2C总线;(STM32开漏输出若外部不接上拉电阻只能输出0)STM32中有很多内置外设的输入输出引脚都具有重映射(remap)的功能,本文对一些在使用引脚重映射时所遇到的有关问题加以说明。
我们知道每个内置外设都有若干个输入输出引脚,一般这些引脚的输出脚位都是固定不变的,为了让设计工程师可以更好地安排引脚的走向和功能,在STM32中引入了外设引脚重映射的概念,即一个外设的引脚除了具有默认的脚位外,还可以通过设置重映射寄存器的方式,把这个外设的引脚映射到其它的脚位。
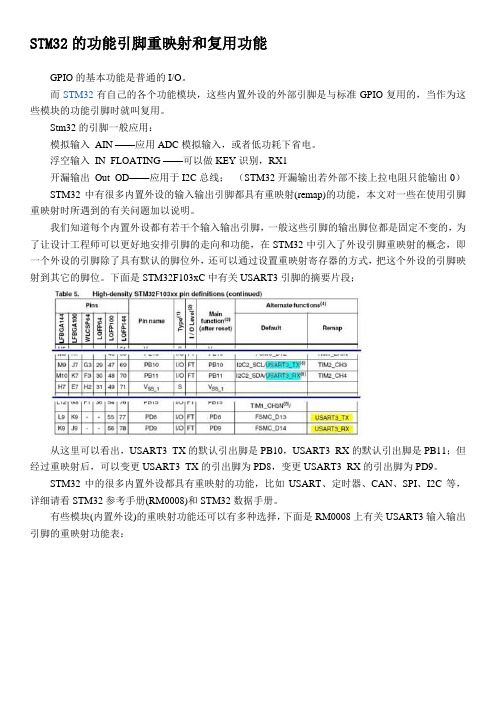
下面是STM32F103xC中有关USART3引脚的摘要片段;从这里可以看出,USART3_TX的默认引出脚是PB10,USART3_RX的默认引出脚是PB11;但经过重映射后,可以变更USART3_TX的引出脚为PD8,变更USART3_RX的引出脚为PD9。
STM32中的很多内置外设都具有重映射的功能,比如USART、定时器、CAN、SPI、I2C等,详细请看STM32参考手册(RM0008)和STM32数据手册。
有些模块(内置外设)的重映射功能还可以有多种选择,下面是RM0008上有关USART3输入输出引脚的重映射功能表:从这个表中可以看出,USART3的TX和RX引脚默认的引出脚位是PB10和PB11,根据配置位的设置,可以重映射到PC10和PC11,还可以重映射到PD8和PD9。
一个模块的功能引脚不管是从默认的脚位引出还是从重映射的脚位引出,都要通过GPIO端口模块实现,相应的GPIO端口必须配置为输入(对应模块的输入功能,如USART的RX)或复用输出(对应模块的输出功能,如USART的TX),对于输出引脚,可以按照需要配置为推挽复用输出或开漏复用输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
树莓派引脚复用关系表解释说明以及概述
1. 引言
1.1 概述
在现代科技领域,树莓派(Raspberry Pi)被广泛应用于各种项目和实验中。
它是一款小型的单板计算机,具备了强大的计算能力和丰富的硬件接口资源。
其中一个重要的特性就是引脚复用(Pin Multiplexing),它使得我们可以通过重新配置树莓派上的引脚实现不同的功能。
本文将重点介绍树莓派引脚复用关系表,解释说明其概念、原理以及其在实际应用中的作用和重要性。
通过详细阐述不同引脚复用模式和实际案例分析,希望读者能够全面了解并熟练运用树莓派引脚复用技术。
1.2 文章结构
本文总共分为四个部分。
首先,在引言部分(本节)将给出文章的概述,引导读者对全文有一个整体的认知;其次,在“树莓派引脚复用关系表解释说明”部分将详细介绍引脚复用相关概念,并解释说明不同方式下的引脚配置情况;然后,在“树莓派引脚复用关系表概述”部分将探讨引脚复用的作用和重要性,并列举常见的引脚复用模式以及实际应用案例;最后,在结论部分对本文进行总结,并展望树莓派引脚复用技术的未来发展。
1.3 目的
本文旨在提供一份综合而详尽的树莓派引脚复用关系表说明和概述,深入解析其原理、作用以及实际应用。
通过阅读本文,读者可以更加全面地了解树莓派引脚复用技术,帮助他们在树莓派项目中灵活使用硬件接口资源,从而实现更多样化、功能强大的应用。
本文还将展望树莓派引脚复用技术的未来可能性,为读者打开更广阔的创新空间。
2. 树莓派引脚复用关系表解释说明
2.1 引脚复用概念介绍
在树莓派开发过程中,由于GPIO(通用输入输出)引脚数量有限,因此需要实现不同功能的设备共享同一个引脚。
这就是引脚复用的概念。
简而言之,引脚复用是指一个引脚可以被配置成多种不同的功能,如串口通信、I2C通信、SPI通信或者作为普通的数字输入输出。
2.2 树莓派引脚复用方式
树莓派上的GPIO引脚可以通过修改相关寄存器来进行复用。
我们可以通过编写软件程序来选择具体使用哪种功能,并将对应的寄存器设置为相应的状态。
有两种主要的复用方式:硬件复用和软件复用。
硬件复用是通过物理接线和连接器来实现,在硬件级别上切换不同功能间的连接。
软件复用则是通过编程控制,
改变寄存器状态和管脚映射来定义特定功能。
2.3 引脚复用关系表示例解析
树莓派引脚复用关系表提供了详细描述每个GPIO引脚所支持的不同功能的信息。
引脚复用表通常包含了每个引脚的物理引脚编号、BCM(Broadcom SOC channel)编号、功能名称和描述等内容。
通过查看这张表我们可以获取到每个引脚所支持的功能,以及在使用时需要注意的一些限制。
举例来说,如果我们要将某个GPIO引脚设置为I2C通信功能,我们可以在引脚复用关系表示例中找到对应该引脚标号或BCM编号,然后更改相应寄存器状态即可完成引脚复用配置。
总之,在树莓派开发中,理解和使用树莓派引脚复用关系表非常重要,因为它使我们能够最大程度地利用有限数量的GPIO引脚,并同时满足多种不同设备或功能的需求。
3. 树莓派引脚复用关系表概述:
3.1 作用和重要性
树莓派引脚复用关系表是一个将树莓派的GPIO(通用输入输出)引脚与其他功能模块进行映射的重要工具。
它提供了用户在树莓派上连接外部设备和组件时的参考指南。
由于树莓派上可用的GPIO引脚有限,且被设计为多功能引脚,其可
以配置成不同的模式,如输入、输出、PWM等。
因此,正确理解和使用引脚复用关系表对于开发者来说至关重要。
3.2 常见的引脚复用模式
在树莓派中,常见的引脚复用模式包括UART(串口)、SPI(串行外设接口)和I2C(快速传输接口)。
通过将这些功能与特定的GPIO引脚进行配对,并使用适当的软件配置,我们可以实现与各种外设和模块的交互。
例如,通过将UART 接口分配到特定的GPIO引脚,我们可以使用串行通信协议与其他设备进行数据交换。
类似地,SPI和I2C也允许我们通过相应的GPIO引脚连接外围设备。
3.3 实际应用案例分析
引脚复用关系表对于树莓派开发中的各种项目至关重要。
例如,在家庭自动化项目中,我们可以使用GPIO引脚将传感器、执行器和其他智能设备与树莓派连接起来。
通过查看引脚复用关系表,我们可以确定要选择的引脚,并了解如何正确配置它们以实现所需的功能。
另一个例子是物联网项目中的嵌入式系统,通过参考引脚复用关系表,可以准确地配置不同通信接口,如WiFi模块、无线传感器网络等。
总之,树莓派引脚复用关系表为树莓派平台上的GPIO引脚提供了合理且有序的分类和映射方式。
它使得开发者能够更加方便地了解和使用不同的功能引脚,并准确地配置与外部设备和模块的交互。
正是通过正确理解和应用树莓派引脚复用关系表,我们能够更灵活、高效地进行树莓派项目的开发和应用。
4. 结论
4.1 总结文章要点
本文主要介绍了树莓派引脚复用关系表及其在开发过程中的重要性。
通过引脚复用关系表,我们可以准确地了解树莓派GPIO引脚的多功能性,并将其正确地配置为不同的功能模式。
这对于与各种外设和模块的交互至关重要,并对树莓派项目的开发和应用产生了积极影响。
4.2 对树莓派引脚复用的意义和发展进行展望
随着物联网和嵌入式系统领域不断发展,树莓派作为一款强大且灵活的嵌入式计算平台将继续受到广大开发者和制造商的青睐。
未来,树莓派引脚复用关系表仍将持续演进并适应新兴技术的需求。
因此,准确理解和使用引脚复用关系表将成为开发者们必备的技能之一,并促使更多创新项目在树莓派平台上实现。
4. 结论:
4.1 总结文章要点:
在本文中,我们深入探讨了树莓派引脚复用关系表的概念和解释说明。
首先,我们介绍了引脚复用的概念,解释了它在树莓派上的应用方式。
随后,我们以实例的形式解析了一张引脚复用关系表示例,帮助读者更好地理解和应用这个概念。
接着,在文章的另一部分中,我们对树莓派引脚复用关系表进行了综述。
我们强调了其在电路设计中的作用和重要性,并列举了常见的引脚复用模式。
最后,通过实际应用案例分析,我们展示了树莓派引脚复用关系表在各种项目中的实际应用场景。
4.2 对树莓派引脚复用的意义和发展进行展望:
树莓派作为一款广受欢迎且功能强大的单板计算机平台,在物联网、教育、创客领域等方面有着广泛应用。
而引脚复用正是使得树莓派具备更多扩展性和灵活性的重要因素之一。
未来,随着物联网和嵌入式系统的不断发展,树莓派引脚复用关系表将不断完善和更新。
更多的引脚复用模式将会被提出,并且针对特定领域或项目进行优化。
同时,为了方便开发者使用和理解,我们期待更加直观和简洁的引脚复用关系表形式以及更友好的文档资料。
总之,树莓派引脚复用关系表是在设计电路连接时必备的参考工具,在树莓派项目中有着重要作用。
我们鼓励开发者深入学习研究这个概念,并将其灵活应用于自己的创意项目中,进一步推动树莓派技术的发展与创新。