M10U3Project
NuMicro N9H30系列开发板用户手册说明书
NuMicro®FamilyArm® ARM926EJ-S BasedNuMaker-HMI-N9H30User ManualEvaluation Board for NuMicro® N9H30 SeriesNUMAKER-HMI-N9H30 USER MANUALThe information described in this document is the exclusive intellectual property ofNuvoton Technology Corporation and shall not be reproduced without permission from Nuvoton.Nuvoton is providing this document only for reference purposes of NuMicro microcontroller andmicroprocessor based system design. Nuvoton assumes no responsibility for errors or omissions.All data and specifications are subject to change without notice.For additional information or questions, please contact: Nuvoton Technology Corporation.Table of Contents1OVERVIEW (5)1.1Features (7)1.1.1NuMaker-N9H30 Main Board Features (7)1.1.2NuDesign-TFT-LCD7 Extension Board Features (7)1.2Supporting Resources (8)2NUMAKER-HMI-N9H30 HARDWARE CONFIGURATION (9)2.1NuMaker-N9H30 Board - Front View (9)2.2NuMaker-N9H30 Board - Rear View (14)2.3NuDesign-TFT-LCD7 - Front View (20)2.4NuDesign-TFT-LCD7 - Rear View (21)2.5NuMaker-N9H30 and NuDesign-TFT-LCD7 PCB Placement (22)3NUMAKER-N9H30 AND NUDESIGN-TFT-LCD7 SCHEMATICS (24)3.1NuMaker-N9H30 - GPIO List Circuit (24)3.2NuMaker-N9H30 - System Block Circuit (25)3.3NuMaker-N9H30 - Power Circuit (26)3.4NuMaker-N9H30 - N9H30F61IEC Circuit (27)3.5NuMaker-N9H30 - Setting, ICE, RS-232_0, Key Circuit (28)NUMAKER-HMI-N9H30 USER MANUAL3.6NuMaker-N9H30 - Memory Circuit (29)3.7NuMaker-N9H30 - I2S, I2C_0, RS-485_6 Circuit (30)3.8NuMaker-N9H30 - RS-232_2 Circuit (31)3.9NuMaker-N9H30 - LCD Circuit (32)3.10NuMaker-N9H30 - CMOS Sensor, I2C_1, CAN_0 Circuit (33)3.11NuMaker-N9H30 - RMII_0_PF Circuit (34)3.12NuMaker-N9H30 - RMII_1_PE Circuit (35)3.13NuMaker-N9H30 - USB Circuit (36)3.14NuDesign-TFT-LCD7 - TFT-LCD7 Circuit (37)4REVISION HISTORY (38)List of FiguresFigure 1-1 Front View of NuMaker-HMI-N9H30 Evaluation Board (5)Figure 1-2 Rear View of NuMaker-HMI-N9H30 Evaluation Board (6)Figure 2-1 Front View of NuMaker-N9H30 Board (9)Figure 2-2 Rear View of NuMaker-N9H30 Board (14)Figure 2-3 Front View of NuDesign-TFT-LCD7 Board (20)Figure 2-4 Rear View of NuDesign-TFT-LCD7 Board (21)Figure 2-5 Front View of NuMaker-N9H30 PCB Placement (22)Figure 2-6 Rear View of NuMaker-N9H30 PCB Placement (22)Figure 2-7 Front View of NuDesign-TFT-LCD7 PCB Placement (23)Figure 2-8 Rear View of NuDesign-TFT-LCD7 PCB Placement (23)Figure 3-1 GPIO List Circuit (24)Figure 3-2 System Block Circuit (25)Figure 3-3 Power Circuit (26)Figure 3-4 N9H30F61IEC Circuit (27)Figure 3-5 Setting, ICE, RS-232_0, Key Circuit (28)Figure 3-6 Memory Circuit (29)Figure 3-7 I2S, I2C_0, RS-486_6 Circuit (30)Figure 3-8 RS-232_2 Circuit (31)Figure 3-9 LCD Circuit (32)NUMAKER-HMI-N9H30 USER MANUAL Figure 3-10 CMOS Sensor, I2C_1, CAN_0 Circuit (33)Figure 3-11 RMII_0_PF Circuit (34)Figure 3-12 RMII_1_PE Circuit (35)Figure 3-13 USB Circuit (36)Figure 3-14 TFT-LCD7 Circuit (37)List of TablesTable 2-1 LCD Panel Combination Connector (CON8) Pin Function (11)Table 2-2 Three Sets of Indication LED Functions (12)Table 2-3 Six Sets of User SW, Key Matrix Functions (12)Table 2-4 CMOS Sensor Connector (CON10) Function (13)Table 2-5 JTAG ICE Interface (J2) Function (14)Table 2-6 Expand Port (CON7) Function (16)Table 2-7 UART0 (J3) Function (16)Table 2-8 UART2 (J6) Function (16)Table 2-9 RS-485_6 (SW6~8) Function (17)Table 2-10 Power on Setting (SW4) Function (17)Table 2-11 Power on Setting (S2) Function (17)Table 2-12 Power on Setting (S3) Function (17)Table 2-13 Power on Setting (S4) Function (17)Table 2-14 Power on Setting (S5) Function (17)Table 2-15 Power on Setting (S7/S6) Function (18)Table 2-16 Power on Setting (S9/S8) Function (18)Table 2-17 CMOS Sensor Connector (CON9) Function (19)Table 2-18 CAN_0 (SW9~10) Function (19)NUMAKER-HMI-N9H30 USER MANUAL1 OVERVIEWThe NuMaker-HMI-N9H30 is an evaluation board for GUI application development. The NuMaker-HMI-N9H30 consists of two parts: a NuMaker-N9H30 main board and a NuDesign-TFT-LCD7 extensionboard. The NuMaker-HMI-N9H30 is designed for project evaluation, prototype development andvalidation with HMI (Human Machine Interface) function.The NuMaker-HMI-N9H30 integrates touchscreen display, voice input/output, rich serial port serviceand I/O interface, providing multiple external storage methods.The NuDesign-TFT-LCD7 can be plugged into the main board via the DIN_32x2 extension connector.The NuDesign-TFT-LCD7 includes one 7” LCD which the resolution is 800x480 with RGB-24bits andembedded the 4-wires resistive type touch panel.Figure 1-1 Front View of NuMaker-HMI-N9H30 Evaluation BoardNUMAKER-HMI-N9H30 USER MANUAL Figure 1-2 Rear View of NuMaker-HMI-N9H30 Evaluation Board1.1 Features1.1.1 NuMaker-N9H30 Main Board Features●N9H30F61IEC chip: LQFP216 pin MCP package with DDR (64 MB)●SPI Flash using W25Q256JVEQ (32 MB) booting with quad mode or storage memory●NAND Flash using W29N01HVSINA (128 MB) booting or storage memory●One Micro-SD/TF card slot served either as a SD memory card for data storage or SDIO(Wi-Fi) device●Two sets of COM ports:–One DB9 RS-232 port with UART_0 used 75C3232E transceiver chip can be servedfor function debug and system development.–One DB9 RS-232 port with UART_2 used 75C3232E transceiver chip for userapplication●22 GPIO expansion ports, including seven sets of UART functions●JTAG interface provided for software development●Microphone input and Earphone/Speaker output with 24-bit stereo audio codec(NAU88C22) for I2S interfaces●Six sets of user-configurable push button keys●Three sets of LEDs for status indication●Provides SN65HVD230 transceiver chip for CAN bus communication●Provides MAX3485 transceiver chip for RS-485 device connection●One buzzer device for program applicationNUMAKER-HMI-N9H30 USER MANUAL●Two sets of RJ45 ports with Ethernet 10/100 Mbps MAC used IP101GR PHY chip●USB_0 that can be used as Device/HOST and USB_1 that can be used as HOSTsupports pen drives, keyboards, mouse and printers●Provides over-voltage and over current protection used APL3211A chip●Retain RTC battery socket for CR2032 type and ADC0 detect battery voltage●System power could be supplied by DC-5V adaptor or USB VBUS1.1.2 NuDesign-TFT-LCD7 Extension Board Features●7” resolution 800x480 4-wire resistive touch panel for 24-bits RGB888 interface●DIN_32x2 extension connector1.2 Supporting ResourcesFor sample codes and introduction about NuMaker-N9H30, please refer to N9H30 BSP:https:///products/gui-solution/gui-platform/numaker-hmi-n9h30/?group=Software&tab=2Visit NuForum for further discussion about the NuMaker-HMI-N9H30:/viewforum.php?f=31 NUMAKER-HMI-N9H30 USER MANUALNUMAKER-HMI-N9H30 USER MANUAL2 NUMAKER-HMI-N9H30 HARDWARE CONFIGURATION2.1 NuMaker-N9H30 Board - Front View Combination Connector (CON8)6 set User SWs (K1~6)3set Indication LEDs (LED1~3)Power Supply Switch (SW_POWER1)Audio Codec(U10)Microphone(M1)NAND Flash(U9)RS-232 Transceiver(U6, U12)RS-485 Transceiver(U11)CAN Transceiver (U13)Figure 2-1 Front View of NuMaker-N9H30 BoardFigure 2-1 shows the main components and connectors from the front side of NuMaker-N9H30 board. The following lists components and connectors from the front view:NuMaker-N9H30 board and NuDesign-TFT-LCD7 board combination connector (CON8). This panel connector supports 4-/5-wire resistive touch or capacitance touch panel for 24-bits RGB888 interface.Connector GPIO pin of N9H30 FunctionCON8.1 - Power 3.3VCON8.2 - Power 3.3VCON8.3 GPD7 LCD_CSCON8.4 GPH3 LCD_BLENCON8.5 GPG9 LCD_DENCON8.7 GPG7 LCD_HSYNCCON8.8 GPG6 LCD_CLKCON8.9 GPD15 LCD_D23(R7)CON8.10 GPD14 LCD_D22(R6)CON8.11 GPD13 LCD_D21(R5)CON8.12 GPD12 LCD_D20(R4)CON8.13 GPD11 LCD_D19(R3)CON8.14 GPD10 LCD_D18(R2)CON8.15 GPD9 LCD_D17(R1)CON8.16 GPD8 LCD_D16(R0)CON8.17 GPA15 LCD_D15(G7)CON8.18 GPA14 LCD_D14(G6)CON8.19 GPA13 LCD_D13(G5)CON8.20 GPA12 LCD_D12(G4)CON8.21 GPA11 LCD_D11(G3)CON8.22 GPA10 LCD_D10(G2)CON8.23 GPA9 LCD_D9(G1) NUMAKER-HMI-N9H30 USER MANUALCON8.24 GPA8 LCD_D8(G0)CON8.25 GPA7 LCD_D7(B7)CON8.26 GPA6 LCD_D6(B6)CON8.27 GPA5 LCD_D5(B5)CON8.28 GPA4 LCD_D4(B4)CON8.29 GPA3 LCD_D3(B3)CON8.30 GPA2 LCD_D2(B2)CON8.31 GPA1 LCD_D1(B1)CON8.32 GPA0 LCD_D0(B0)CON8.33 - -CON8.34 - -CON8.35 - -CON8.36 - -CON8.37 GPB2 LCD_PWMCON8.39 - VSSCON8.40 - VSSCON8.41 ADC7 XPCON8.42 ADC3 VsenCON8.43 ADC6 XMCON8.44 ADC4 YMCON8.45 - -CON8.46 ADC5 YPCON8.47 - VSSCON8.48 - VSSCON8.49 GPG0 I2C0_CCON8.50 GPG1 I2C0_DCON8.51 GPG5 TOUCH_INTCON8.52 - -CON8.53 - -CON8.54 - -CON8.55 - -NUMAKER-HMI-N9H30 USER MANUAL CON8.56 - -CON8.57 - -CON8.58 - -CON8.59 - VSSCON8.60 - VSSCON8.61 - -CON8.62 - -CON8.63 - Power 5VCON8.64 - Power 5VTable 2-1 LCD Panel Combination Connector (CON8) Pin Function●Power supply switch (SW_POWER1): System will be powered on if the SW_POWER1button is pressed●Three sets of indication LEDs:LED Color DescriptionsLED1 Red The system power will beterminated and LED1 lightingwhen the input voltage exceeds5.7V or the current exceeds 2A.LED2 Green Power normal state.LED3 Green Controlled by GPH2 pin Table 2-2 Three Sets of Indication LED Functions●Six sets of user SW, Key Matrix for user definitionKey GPIO pin of N9H30 FunctionK1 GPF10 Row0 GPB4 Col0K2 GPF10 Row0 GPB5 Col1K3 GPE15 Row1 GPB4 Col0K4 GPE15 Row1 GPB5 Col1K5 GPE14 Row2 GPB4 Col0K6GPE14 Row2GPB5 Col1 Table 2-3 Six Sets of User SW, Key Matrix Functions●NAND Flash (128 MB) with Winbond W29N01HVS1NA (U9)●Microphone (M1): Through Nuvoton NAU88C22 chip sound input●Audio CODEC chip (U10): Nuvoton NAU88C22 chip connected to N9H30 using I2Sinterface–SW6/SW7/SW8: 1-2 short for RS-485_6 function and connected to 2P terminal (CON5and J5)–SW6/SW7/SW8: 2-3 short for I2S function and connected to NAU88C22 (U10).●CMOS Sensor connector (CON10, SW9~10)–SW9~10: 1-2 short for CAN_0 function and connected to 2P terminal (CON11)–SW9~10: 2-3 short for CMOS sensor function and connected to CMOS sensorconnector (CON10)Connector GPIO pin of N9H30 FunctionCON10.1 - VSSCON10.2 - VSSNUMAKER-HMI-N9H30 USER MANUALCON10.3 - Power 3.3VCON10.4 - Power 3.3VCON10.5 - -CON10.6 - -CON10.7 GPI4 S_PCLKCON10.8 GPI3 S_CLKCON10.9 GPI8 S_D0CON10.10 GPI9 S_D1CON10.11 GPI10 S_D2CON10.12 GPI11 S_D3CON10.13 GPI12 S_D4CON10.14 GPI13 S_D5CON10.15 GPI14 S_D6CON10.16 GPI15 S_D7CON10.17 GPI6 S_VSYNCCON10.18 GPI5 S_HSYNCCON10.19 GPI0 S_PWDNNUMAKER-HMI-N9H30 USER MANUAL CON10.20 GPI7 S_nRSTCON10.21 GPG2 I2C1_CCON10.22 GPG3 I2C1_DCON10.23 - VSSCON10.24 - VSSTable 2-4 CMOS Sensor Connector (CON10) FunctionNUMAKER-HMI-N9H30 USER MANUAL2.2NuMaker-N9H30 Board - Rear View5V In (CON1)RS-232 DB9 (CON2,CON6)Expand Port (CON7)Speaker Output (J4)Earphone Output (CON4)Buzzer (BZ1)System ResetSW (SW5)SPI Flash (U7,U8)JTAG ICE (J2)Power ProtectionIC (U1)N9H30F61IEC (U5)Micro SD Slot (CON3)RJ45 (CON12, CON13)USB1 HOST (CON15)USB0 Device/Host (CON14)CAN_0 Terminal (CON11)CMOS Sensor Connector (CON9)Power On Setting(SW4, S2~S9)RS-485_6 Terminal (CON5)RTC Battery(BT1)RMII PHY (U14,U16)Figure 2-2 Rear View of NuMaker-N9H30 BoardFigure 2-2 shows the main components and connectors from the rear side of NuMaker-N9H30 board. The following lists components and connectors from the rear view:● +5V In (CON1): Power adaptor 5V input ●JTAG ICE interface (J2) ConnectorGPIO pin of N9H30Function J2.1 - Power 3.3V J2.2 GPJ4 nTRST J2.3 GPJ2 TDI J2.4 GPJ1 TMS J2.5 GPJ0 TCK J2.6 - VSS J2.7 GPJ3 TD0 J2.8-RESETTable 2-5 JTAG ICE Interface (J2) Function●SPI Flash (32 MB) with Winbond W25Q256JVEQ (U7); only one (U7 or U8) SPI Flashcan be used●System Reset (SW5): System will be reset if the SW5 button is pressed●Buzzer (BZ1): Control by GPB3 pin of N9H30●Speaker output (J4): Through the NAU88C22 chip sound output●Earphone output (CON4): Through the NAU88C22 chip sound output●Expand port for user use (CON7):Connector GPIO pin of N9H30 FunctionCON7.1 - Power 3.3VCON7.2 - Power 3.3VCON7.3 GPE12 UART3_TXDCON7.4 GPH4 UART1_TXDCON7.5 GPE13 UART3_RXDCON7.6 GPH5 UART1_RXDCON7.7 GPB0 UART5_TXDCON7.8 GPH6 UART1_RTSCON7.9 GPB1 UART5_RXDCON7.10 GPH7 UART1_CTSCON7.11 GPI1 UART7_TXDNUMAKER-HMI-N9H30 USER MANUAL CON7.12 GPH8 UART4_TXDCON7.13 GPI2 UART7_RXDCON7.14 GPH9 UART4_RXDCON7.15 - -CON7.16 GPH10 UART4_RTSCON7.17 - -CON7.18 GPH11 UART4_CTSCON7.19 - VSSCON7.20 - VSSCON7.21 GPB12 UART10_TXDCON7.22 GPH12 UART8_TXDCON7.23 GPB13 UART10_RXDCON7.24 GPH13 UART8_RXDCON7.25 GPB14 UART10_RTSCON7.26 GPH14 UART8_RTSCON7.27 GPB15 UART10_CTSCON7.28 GPH15 UART8_CTSCON7.29 - Power 5VCON7.30 - Power 5VTable 2-6 Expand Port (CON7) Function●UART0 selection (CON2, J3):–RS-232_0 function and connected to DB9 female (CON2) for debug message output.–GPE0/GPE1 connected to 2P terminal (J3).Connector GPIO pin of N9H30 Function J3.1 GPE1 UART0_RXDJ3.2 GPE0 UART0_TXDTable 2-7 UART0 (J3) Function●UART2 selection (CON6, J6):–RS-232_2 function and connected to DB9 female (CON6) for debug message output –GPF11~14 connected to 4P terminal (J6)Connector GPIO pin of N9H30 Function J6.1 GPF11 UART2_TXDJ6.2 GPF12 UART2_RXDJ6.3 GPF13 UART2_RTSJ6.4 GPF14 UART2_CTSTable 2-8 UART2 (J6) Function●RS-485_6 selection (CON5, J5, SW6~8):–SW6~8: 1-2 short for RS-485_6 function and connected to 2P terminal (CON5 and J5) –SW6~8: 2-3 short for I2S function and connected to NAU88C22 (U10)Connector GPIO pin of N9H30 FunctionSW6:1-2 shortGPG11 RS-485_6_DISW6:2-3 short I2S_DOSW7:1-2 shortGPG12 RS-485_6_ROSW7:2-3 short I2S_DISW8:1-2 shortGPG13 RS-485_6_ENBSW8:2-3 short I2S_BCLKNUMAKER-HMI-N9H30 USER MANUALTable 2-9 RS-485_6 (SW6~8) FunctionPower on setting (SW4, S2~9).SW State FunctionSW4.2/SW4.1 ON/ON Boot from USB SW4.2/SW4.1 ON/OFF Boot from eMMC SW4.2/SW4.1 OFF/ON Boot from NAND Flash SW4.2/SW4.1 OFF/OFF Boot from SPI Flash Table 2-10 Power on Setting (SW4) FunctionSW State FunctionS2 Short System clock from 12MHzcrystalS2 Open System clock from UPLL output Table 2-11 Power on Setting (S2) FunctionSW State FunctionS3 Short Watchdog Timer OFFS3 Open Watchdog Timer ON Table 2-12 Power on Setting (S3) FunctionSW State FunctionS4 Short GPJ[4:0] used as GPIO pinS4Open GPJ[4:0] used as JTAG ICEinterfaceTable 2-13 Power on Setting (S4) FunctionSW State FunctionS5 Short UART0 debug message ONS5 Open UART0 debug message OFFTable 2-14 Power on Setting (S5) FunctionSW State FunctionS7/S6 Short/Short NAND Flash page size 2KBS7/S6 Short/Open NAND Flash page size 4KBS7/S6 Open/Short NAND Flash page size 8KBNUMAKER-HMI-N9H30 USER MANUALS7/S6 Open/Open IgnoreTable 2-15 Power on Setting (S7/S6) FunctionSW State FunctionS9/S8 Short/Short NAND Flash ECC type BCH T12S9/S8 Short/Open NAND Flash ECC type BCH T15S9/S8 Open/Short NAND Flash ECC type BCH T24S9/S8 Open/Open IgnoreTable 2-16 Power on Setting (S9/S8) FunctionCMOS Sensor connector (CON9, SW9~10)–SW9~10: 1-2 short for CAN_0 function and connected to 2P terminal (CON11).–SW9~10: 2-3 short for CMOS sensor function and connected to CMOS sensorconnector (CON9).Connector GPIO pin of N9H30 FunctionCON9.1 - VSSCON9.2 - VSSCON9.3 - Power 3.3VCON9.4 - Power 3.3V NUMAKER-HMI-N9H30 USER MANUALCON9.5 - -CON9.6 - -CON9.7 GPI4 S_PCLKCON9.8 GPI3 S_CLKCON9.9 GPI8 S_D0CON9.10 GPI9 S_D1CON9.11 GPI10 S_D2CON9.12 GPI11 S_D3CON9.13 GPI12 S_D4CON9.14 GPI13 S_D5CON9.15 GPI14 S_D6CON9.16 GPI15 S_D7CON9.17 GPI6 S_VSYNCCON9.18 GPI5 S_HSYNCCON9.19 GPI0 S_PWDNCON9.20 GPI7 S_nRSTCON9.21 GPG2 I2C1_CCON9.22 GPG3 I2C1_DCON9.23 - VSSCON9.24 - VSSTable 2-17 CMOS Sensor Connector (CON9) Function●CAN_0 Selection (CON11, SW9~10):–SW9~10: 1-2 short for CAN_0 function and connected to 2P terminal (CON11) –SW9~10: 2-3 short for CMOS sensor function and connected to CMOS sensor connector (CON9, CON10)SW GPIO pin of N9H30 FunctionSW9:1-2 shortGPI3 CAN_0_RXDSW9:2-3 short S_CLKSW10:1-2 shortGPI4 CAN_0_TXDSW10:2-3 short S_PCLKTable 2-18 CAN_0 (SW9~10) Function●USB0 Device/HOST Micro-AB connector (CON14), where CON14 pin4 ID=1 is Device,ID=0 is HOST●USB1 for USB HOST with Type-A connector (CON15)●RJ45_0 connector with LED indicator (CON12), RMII PHY with IP101GR (U14)●RJ45_1 connector with LED indicator (CON13), RMII PHY with IP101GR (U16)●Micro-SD/TF card slot (CON3)●SOC CPU: Nuvoton N9H30F61IEC (U5)●Battery power for RTC 3.3V powered (BT1, J1), can detect voltage by ADC0●RTC power has 3 sources:–Share with 3.3V I/O power–Battery socket for CR2032 (BT1)–External connector (J1)●Board version 2.1NUMAKER-HMI-N9H30 USER MANUAL2.3 NuDesign-TFT-LCD7 -Front ViewFigure 2-3 Front View of NuDesign-TFT-LCD7 BoardFigure 2-3 shows the main components and connectors from the Front side of NuDesign-TFT-LCD7board.7” resolution 800x480 4-W resistive touch panel for 24-bits RGB888 interface2.4 NuDesign-TFT-LCD7 -Rear ViewFigure 2-4 Rear View of NuDesign-TFT-LCD7 BoardFigure 2-4 shows the main components and connectors from the rear side of NuDesign-TFT-LCD7board.NuMaker-N9H30 and NuDesign-TFT-LCD7 combination connector (CON1).NUMAKER-HMI-N9H30 USER MANUAL 2.5 NuMaker-N9H30 and NuDesign-TFT-LCD7 PCB PlacementFigure 2-5 Front View of NuMaker-N9H30 PCB PlacementFigure 2-6 Rear View of NuMaker-N9H30 PCB PlacementNUMAKER-HMI-N9H30 USER MANUALFigure 2-7 Front View of NuDesign-TFT-LCD7 PCB PlacementFigure 2-8 Rear View of NuDesign-TFT-LCD7 PCB Placement3 NUMAKER-N9H30 AND NUDESIGN-TFT-LCD7 SCHEMATICS3.1 NuMaker-N9H30 - GPIO List CircuitFigure 3-1 shows the N9H30F61IEC GPIO list circuit.Figure 3-1 GPIO List Circuit NUMAKER-HMI-N9H30 USER MANUAL3.2 NuMaker-N9H30 - System Block CircuitFigure 3-2 shows the System Block Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-2 System Block Circuit3.3 NuMaker-N9H30 - Power CircuitFigure 3-3 shows the Power Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-3 Power Circuit3.4 NuMaker-N9H30 - N9H30F61IEC CircuitFigure 3-4 shows the N9H30F61IEC Circuit.Figure 3-4 N9H30F61IEC CircuitNUMAKER-HMI-N9H30 USER MANUAL3.5 NuMaker-N9H30 - Setting, ICE, RS-232_0, Key CircuitFigure 3-5 shows the Setting, ICE, RS-232_0, Key Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-5 Setting, ICE, RS-232_0, Key Circuit3.6 NuMaker-N9H30 - Memory CircuitFigure 3-6 shows the Memory Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-6 Memory Circuit3.7 NuMaker-N9H30 - I2S, I2C_0, RS-485_6 CircuitFigure 3-7 shows the I2S, I2C_0, RS-486_6 Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-7 I2S, I2C_0, RS-486_6 Circuit3.8 NuMaker-N9H30 - RS-232_2 CircuitFigure 3-8 shows the RS-232_2 Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-8 RS-232_2 Circuit3.9 NuMaker-N9H30 - LCD CircuitFigure 3-9 shows the LCD Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-9 LCD Circuit3.10 NuMaker-N9H30 - CMOS Sensor, I2C_1, CAN_0 CircuitFigure 3-10 shows the CMOS Sensor,I2C_1, CAN_0 Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-10 CMOS Sensor, I2C_1, CAN_0 Circuit3.11 NuMaker-N9H30 - RMII_0_PF CircuitFigure 3-11 shows the RMII_0_RF Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-11 RMII_0_PF Circuit3.12 NuMaker-N9H30 - RMII_1_PE CircuitFigure 3-12 shows the RMII_1_PE Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-12 RMII_1_PE Circuit3.13 NuMaker-N9H30 - USB CircuitFigure 3-13 shows the USB Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-13 USB Circuit3.14 NuDesign-TFT-LCD7 - TFT-LCD7 CircuitFigure 3-14 shows the TFT-LCD7 Circuit.Figure 3-14 TFT-LCD7 CircuitNUMAKER-HMI-N9H30 USER MANUAL4 REVISION HISTORYDate Revision Description2022.03.24 1.00 Initial version NUMAKER-HMI-N9H30 USER MANUALNUMAKER-HMI-N9H30 USER MANUALImportant NoticeNuvoton Products are neither intended nor warranted for usage in systems or equipment, anymalfunction or failure of which may cause loss of human life, bodily injury or severe propertydamage. Such applications are deemed, “Insecure Usage”.Insecure usage includes, but is not limited to: equipment for surgical implementation, atomicenergy control instruments, airplane or spaceship instruments, the control or operation ofdynamic, brake or safety systems designed for vehicular use, traffic signal instruments, all typesof safety devices, and other applications intended to support or sustain life.All Insecure Usage shall be made at customer’s risk, and in the event that third parties lay claimsto Nuvoton as a result of customer’s Insecure Usage, custome r shall indemnify the damagesand liabilities thus incurred by Nuvoton.。
M10U3project(2015)

Three main First classes of drugs Second and their effects on 4______ the body
Third
confused and sometimes they have ※ people feel 8________ false senses.
M10 U3 Project Just Say No!
Fast reading Try to find out how the booklet is developed?
Part 1 Question-raising
Why do people take drugs?
Part 2 Question-analyzing
Reasons 1.______ for taking drugs
curiosity ※ 2._______ ※ To rebel against their families or society ※ To be 3________by their friends who are drug users accepted
4.trap vt. trapped, trapped使(某人)陷入困 境;使陷入圈套;夹住;卡住 n. 陷阱,圈套;困境 (1)I __________________ was trapped into telling the police all I knew. 我中计了,把所知道的一切全都告诉了警方。 (2)They____________the burning hotel. were trapped in 他们被困在发生火灾的旅馆里。 (3) The thieves were caught in a police trap. 窃贼被警方用计擒获。 _________________
牛津高中英语模块十第三单元词组M10U3

1. an abrupt scream 一声突然的尖叫2. too numb with sorrow to weep 因为悲伤太过麻木哭不出来3. give a sideways glance 向旁边扫了一眼4. sth happen to sb sb发生了sthsb happen to do sth 碰巧做了sth5. with no outward symptoms 没有外在的症状6. lose the ability to do 失去做sth 的能力7. cure sb of sth 治愈sb sth8. at a high rate 极高的速率9. pass on 传递10. share sth with sb 和sb分享sth11. be pregnant 怀孕期间12. give birth to sb 把sb生下来13. contrary to 和……相反的on the contrary 相反的14. be familiar with 对……熟悉15. burst on the scene 突然爆发,突然出现burst into laughter 爆发出笑声burst out laughing16. upwards of =-over 超过17. lost their parents to Aids 因为Aids而失去了他们的父母lose ground 失利,落后be lost in 沉迷于be buried inbe occupied with sthbe occupied in doing sth18. in a bid to do 尝试做sth19. provide free drugs for Aids patientsprovide sb with sth 提供sb sth20. devote oneself to doing sth sb致力于做sth21. be active in doing 在……方面积极22. the agenda of 日程表23. keep sb from doing sth 阻止sb 做sth24. care for sb= attend to sb 照顾sb25. be the key to doing sth是做sth 的关键1. a messy situation 混乱的状况2. be curious about 对……好奇的be curious to do sth 好奇做stharouse curiosity 引起好奇,激发好奇心out of curiosity 因为好奇,出于好奇3. rebel against 反抗,反叛set off rebellion 引发反叛4. drug users 吸毒者drug addicts 毒品上瘾的人drug clinic 戒毒所5. produce different reactions 产生不同的反映6. make people addicted 使人上瘾sb be addicted to 对……上瘾的7. nervous tension 神经紧张8. reduce one’s appetite 降低sb的食欲have a good/poor appetite 有食欲/没食欲have an appetite for knowledge 对知识有兴趣9. have trouble quitting smoking 戒烟困难10. an artificial sense of pleasure 一种人造的快感11. slide on the ice 在冰上滑行side out of the room =creep 悄悄的出去slide into sth 陷入(不好的状况)slide into the habit of 陷入……(不好的习惯)on the slide 每况愈下12. range from 在……范围13. acute anxiety 极度焦虑14. be trapped in 陷入15. escape from 从……逃离16. suck the life right out of a person 从一个人的生命中吸取17. death sentence 死刑be condemned /sentence to death 被判死刑18. start over again 从头再来19. wipe away= remove 消除wipe out 消灭20. stain one’s reputation 玷污名誉21. break the addiction 打破成瘾22. in the first place 首先。
慕尼黑工业公司LMS8系列电动锤子产品介绍说明书

LMS8 seriesI mpact wrenchesSUPERPOWERFOR INDUSTRYLMS58LMS88LMS68GRSThe LMS8-series impact wrenches deliver true raw power and enable extremely fast tightening and loosening. The innovative and unique grease retaining system ensures maximum tool performance with long service intervals. For an impact wrench, the LMS8 also has extraordinarily low vibration levels. Once you have experienced the feel and great performance of the LMS8 there is no substitute.LONG SERVICE INTERVALS AND LASTING HIGH PERFORMANCEThe unique Grease Retaining System (GRS) allows for much longer service intervals.Because the grease stays in the clutch, low viscosity grease can be used which decreases friction and increases performance. All in all, this results in a very consistent, high performance tool.5500NmHIGHEST POWER-TO-WEIGHT RATIOAn extremely powerful motor and a highly efficient clutch, in combination with low weight housings, give the LMS8-series unrivalled power-to-weight characteristics, allowing for very fast torque build up.DURABLE METAL HOUSINGSThe robust, solid metal motor and clutch housings characterize a true heavy duty tool that is able to withstand the toughest conditions.MINIMUM WEAR AND LOW VIBRATIONSEach part of the durable LMS8-Series clutch is produ-ced with a high degree of accuracy. T his allows the maximum amount of energy to be generated in each impact. It also minimizes wear, vibration and strain on the operator.THE MAN BEHIND IT ALLMaking the best performing impact wrenches in the industry is not something that happens overnight. In fact, Christian Schoeps has dedicated 45 years to de-veloping and designing Atlas Copco’s pneumatic tools. The latest result of his dedication is the LMS8-Series, which delivers unmatched performance among impactwrenches.9833 1967 01 2014:1a Female hex. quick change chuck.bSpline drive No. 5.GOR = Outside trigger.GIR = Inside trigger.TECHNICAL DATALength CSAir con-Rec. AirBoltSquareFree excl. dist- sumption hose inlet size drive Torque rangeMax torque Impacts speed Weight anvil ance under load size thread Modelmm in Nm ft lbNmft lb per min r/minkg lb mm mm l/s cfmmm in Ordering No.LMS08 HR10 6-8 3/8 7-45 5-33 65 48 1650 14000 0.90 2.0 185 21 2.5 5 6.3 1/4 8434108000LMS08 HR42 6-8 1/4 a 7-35 5-26 60 44 1650 14000 0.9 2.0 186 21 2.5 5 6.3 1/4 8434108005LMS08 SR42 6-8 1/4 a 7-35 5-26 60 44 1650 12500 0.85 1.9 185 20 4.3 9.1 6.3 1/4 8434108106LMS08 SR10 6-8 3/8 7-45 5-33 65 48 1650 12500 0.85 1.9 184 20 4.3 9.1 6.3 1/4 8434108111LMS18 HR13 10 1/2 10-110 7-81 150 110 1500 8100 1.45 3.2 144 26 8.5 18 10 1/4 8434118000LMS18 HR10 10 3/8 10-90 7-66 120 88 1650 8100 1.45 3.2 148 26 6.5 14 10 1/4 8434118001LMS18 HR13/F 10 1/2 10-110 7-81 150 110 1500 8100 1.45 3.2 144 26 8.5 18 10 1/4 8434118002LMS18 HR10/F 10 3/8 10-90 7-66 120 88 1650 8100 1.45 3.2 148 26 6.5 14 10 1/4 8434118003LMS28 HR13 12 1/2 30-210 22-155 390 287 1500 9500 1.85 4.1 146 29 8.5 18 10 3/8 8434128000LMS28 HR13/F 12 1/2 30-210 22-155 390 287 1500 9500 1.85 4.1 146 29 8.5 18 10 3/8 8434128001LMS38 HR13 14-16 1/2 40-375 29-276 850 627 1350 8000 2.6 5.7 167 29 10 21 10 3/8 8434138000LMS38 HR13/F 14-16 1/2 40-375 29-276 850 627 1350 8000 2.6 5.7 167 29 10 21 10 3/8 8434138001LMS48 HR20 16-18 3/4 100-550 74-405 1375 1014 1100 6500 3.3 7.3 173 38 12 25.2 12.5 3/8 8434148000LMS58 HR25 20-22 1 300-800 221-590 1900 1401 900 5500 4.8 10.6 210 42 14.5 30.5 12.5 3/8 8434158000LMS58 HR20 18-20 3/4 300-800 221-590 1900 1401 900 5500 4.8 10.6 210 42 14.5 30.5 12.5 3/8 8434158001LMS68 GIR25 22-30 1 600-1800 442-1400 4450 3282 780 5000 9.6 21.1 339 55 28 58.9 16 1/2 8434168000LMS68 HR25 22-30 1 600-1800 442-1400 4450 3282 780 5000 9.8 21.5 252 55 28 58.9 16 1/2 8434168001LMS68 GOR25 22-30 1 600-1800 442-1400 4450 3282 780 5000 9.6 21.1 339 55 28 58.9 16 1/2 8434168002LMS68 HR S5 22-30 1 5/8 b 600-1800 442-1400 4450 3282 780 5000 9.8 21.5 252 55 28 58.9 16 1/2 8434168003LMS68 GIR S5 22-30 1 5/8 b600-1800 442-1400 4450 3282 780 5000 9.6 21.1 339 55 28 58.9 16 1/2 8434168005LMS68 GOR S5 22-30 1 5/8 b 600-1800 442-1400 4450 3282 780 5000 9.6 21.1 339 55 28 58.9 16 1/2 8434168010LMS88 GIR38 30-42 1 1/2 1000-5500 737-4054 10000 7370 540 3800 15.0 33.0 381 63.5 33 69.4 16 1/2 8434188000LMS88 GOR38 30-42 1 1/2 1000-5500 737-4054 10000 7370 540 3800 15.0 33.0 381 63.5 33 69.4 16 1/2 8434188001LMS88 GIR S5 30-42 1 5/8 b 1000-5500 737-4054 10000 7370 540 3800 15.0 33.0 381 63.5 33 69.4 16 1/2 8434188005LMS88 GOR S5 30-42 1 5/8 b 1000-5500 737-4054 10000 7370 540 3800 15.0 33.0 381 63.5 33 69.4 16 1/2 8434188010 COMMITTED TO SUSTAINABLE PRODUCTIVITYProductivity kitMultiFlex Whip hose LMS08 HRLMS58 HR LMS88 GIRLMS68 GIR LMS 08 SR aThe uncertainly in the sound level is 3 dB(A).。
MAX-M10S u-blox M10高精度GNSS模块数据手册说明书

MAX-M10Su-blox M10 standard precision GNSS moduleData sheetAbstractThis document describes the features and application of the MAX-M10S,an ultra-low-power GNSS receiver for high-performance asset-trackingdevices.UBX-20035208 - R01C1-PublicDocument informationTitle MAX-M10SSubtitle u-blox M10 standard precision GNSS moduleDocument type Data sheetDocument number UBX-20035208Revision and date R0121-Dec-2020 Document status Objective specificationDisclosure restriction C1-PublicProduct status Corresponding content statusIn development /Objective specification Target values. Revised and supplementary data will be published later. prototypeEngineering sample Advance information Data based on early testing. Revised and supplementary data will bepublished later.Initial production Early production information Data from product verification. Revised and supplementary data may bepublished later.Mass production /Production information Document contains the final product specification.End of lifeThis document applies to the following products:Product name Type number Firmware version PCN referenceMAX-M10S MAX-M10S-00B-00SPG 5.00N/Au-blox reserves all rights to this document and the information contained herein. Products, names, logos and designs described herein may in whole or in part be subject to intellectual property rights. Reproduction, use, modification or disclosure to third parties of this document or any part thereof without the express permission of u-blox is strictly prohibited. The information contained herein is provided "as is" and u-blox assumes no liability for the use of the information. No warranty, either express or implied, is given with respect to, including but not limited to, the accuracy, correctness, reliability and fitness for a particular purpose of the information. This document may be revised by u-blox at any time. For most recent documents, please visit www.u .Copyright © 2020, u-blox AG.u-blox is a registered trademark of u-blox Holding AG in the EU and other countries.Contents1 Functional description (4)1.1 Overview (4)1.2 Performance (4)1.3 Supported GNSS constellations (5)1.4 Supported protocols (6)1.5 Firmware features (6)2 System description (7)2.1 Block diagram (7)3 Pin definition (8)3.1 Pin assignment (8)4 Electrical specification (10)4.1 Absolute maximum ratings (10)4.2 Operating conditions (10)4.3 Indicative power requirements (11)5 Communication interfaces (13)5.1 UART (13)5.2 I2C (13)5.3 Default interface settings (13)6 Mechanical specification (14)7 Labeling and ordering information (15)7.1 Product labeling (15)7.2 Explanation of product codes (15)7.3 Ordering codes (15)Related documents (17)Revision history (18)1 Functional description1.1 OverviewThe MAX-M10S module features the u-blox M10 standard precision GNSS platform and provides exceptional sensitivity and acquisition times for all L1 GNSS signals.The extremely low power consumption in continuous tracking mode allows great power autonomy for all battery-operated devices, such as asset trackers, without compromising on GNSS performance.The MAX-M10S supports concurrent reception of up to four GNSS (GPS, GLONASS, Galileo, and BeiDou). The high number of visible satellites enables the receiver to select the best signals. This maximizes the position accuracy, in particular under challenging conditions such as in deep urban canyons. In the firmware described here, however, the number of concurrently received GNSS is limited to three. u-blox Super-S (Super-Signal) technology offers great RF sensitivity.The MAX-M10S integrates an LNA followed by a SAW filter in the RF path for maximum sensitivity in passive antenna designs.The MAX-M10S offers backwards pin-to-pin compatibility with products from the previous u-blox generations, which saves the designer's effort and reduces costs when upgrading designs.The MAX-M10S is based on the u-blox M10 GNSS chip, which is qualified according to AEC-Q100, manufactured in IATF 16949 certified sites, and fully tested on a system level.1.2 PerformanceParameter SpecificationReceiver type u-blox M10 receiverAccuracy of time pulse signal RMS99%30 ns60 nsFrequency of time pulse signal 0.25 Hz to 10 MHz (configurable)Operational limits1Dynamics≤ 4 gAltitude80,000 mVelocity500 m/sVelocity accuracy20.05 m/sDynamic heading accuracy20.3 degGNSS GPS+GAL GPS+GLO GPS+BDS GPS+GLO+GAL GPS+GAL+BDSAcquisition3Cold startHot startAided start429 s1 s1 s26 s1 s1 s27 s1 s1 s24 s1 s1 s27 s1 s1 sNav. update rate PVT10 Hz10 Hz10 Hz10 Hz10 Hz1Assuming Airborne 4 g platform250% at 30 m/s for dynamic operation3Commanded starts. All satellites at -130 dBm. GPS always in combination with QZSS and SBAS. Measured at room temperature.4Dependent on the speed and latency of the aiding data connection, commanded starts.GNSS GPS+GAL GPS+GLO GPS+BDS GPS+GLO+GAL GPS+GAL+BDSSensitivity5Tracking and nav.ReacquisitionCold startHot start -166 dBm-160 dBm-148 dBm-160 dBm-167 dBm-160 dBm-148 dBm-160 dBm-167 dBm-160 dBm-148 dBm-160 dBm-167 dBm-160 dBm-148 dBm-160 dBm-166 dBm-160 dBm-148 dBm-160 dBmPosition accuracy PVT 2 m CEP 2 m CEP 2 m CEP 2 m CEP 2 m CEP Table 1: MAX-M10S typical performance in multi-constellation GNSS modesGNSS GPS GLONASS BEIDOU GALILEOAcquisition3Cold startHot startAided start429 s1 s1 s27 s1 s1 s30 s1 s1 s38 s1 s5 sNav. update rate PVT18 Hz18 Hz18 Hz18 HzSensitivity5Tracking and nav.ReacquisitionCold startHot start -166 dBm-160 dBm-148 dBm-160 dBm-166 dBm-154 dBm-147 dBm-156 dBm-160 dBm-158 dBm-146 dBm-159 dBm-159 dBm-154 dBm-141 dBm-154 dBmPosition accuracy PVT 2 m CEP 4 m CEP 3 m CEP 3 m CEPTable 2: MAX-M10S typical performance in single-GNSS modes1.3 Supported GNSS constellationsThe MAX-M10S is a concurrent GNSS receiver which can receive and track multiple GNSS systems. The single RF front-end architecture enables all major GNSS constellations to be received concurrently. The receiver can be configured for a sub-set of GNSS constellations to achieve lower power consumption.The following GNSS and their signals are supported:System SignalsGPS L1C/A (1575.42 MHz)Galileo E1-B/C (1575.42 MHz)GLONASS L1OF (1602 MHz + k*562.5 kHz, k = –7,..., 5, 6)BeiDou B1I (1561.098 MHz)Table 3: Supported GNSS and signals on MAX-M10SThe following GNSS assistance services are supported:Service SupportAssistNow™ Online SupportedAssistNow™ Offline SupportedAssistNow™ Autonomous SupportedTable 4: Supported Assisted GNSS (A-GNSS) servicesThe following augmentation systems are supported:5Demonstrated with a good external LNA. Measured at room temperature.System SupportSBAS EGNOS, GAGAN, MSAS and WAASQZSS L1S (SLAS)Table 5: Supported augmentation systemsThe augmentation systems SBAS and QZSS can be enabled only if GPS operation is also enabled.1.4 Supported protocolsThe MAX-M10S supports the following protocols:Protocol TypeUBX Input/output, binary, u-blox proprietaryNMEA versions 2.1, 2.3, 4.0, and 4.10. (default 4.10)Input/output, ASCIITable 6: Supported protocols1.5 Firmware featuresFeature DescriptionAntenna supervisor6Active antenna supervisor to detect short and open statusAssisted GNSS AssistNow Online, AssistNow Offline and AssistNow Autonomous supported Backup modes Hardware backup mode, hardware standby mode, software standby mode (similar toolder software backup mode), all with optional RTCData batching Autonomous tracking up to 5 minutes at 1 HzOdometer Measure traveled distance with support for different user profilesTable 7: Firmware featuresFeature DescriptionAnti-jamming RF interference and jamming detection and reporting; Active GNSS in-band filtering Anti-spoofing Spoofing detection and reportingMessage integrity All messages are cryptographically signed, JTAG debug interface disabled by default Table 8: Security features6External components required, some pins need to be reprogrammed as needed.2 System description2.1 Block diagramFigure 1: MAX-M10S block diagramThe GPIOs can be programmed for different uses like external interrupt, enable LNA, TX ready, data batching indicator, and antenna supervisor.3 Pin definition3.1 Pin assignmentThe pin assignment of the MAX-M10S module is shown below:Figure 2: MAX-M10S pin assignmentPin PIO no.I/O Description1GND--Connect to GND2TXD1O UART TX3RXD0I UART RX4TIMEPULSE4O Time pulse signal5EXTINT5I External interrupt6V_BCKP-I Backup voltage supply7V_IO-I IO voltage supply8VCC-I Main voltage supply9RESET_N-I System reset (active low)10GND--Connect to GND11RF_IN-I GNSS signal input12GND--Connect to GND13LNA_EN-O On/Off external LNA or active antenna 14VCC_RF-O Output voltage RF section15Reserved--Reserved16SDA2I/O I2C data17SCL3I I2C clockPin PIO no.I/O Description18SAFEBOOT_N-I Safeboot mode (leave OPEN) Table 9: MAX-M10S pin assignment4 Electrical specificationThe limiting values given are in accordance with the Absolute Maximum Rating System(IEC 134). Stress above one or more of the limiting values may cause permanent damageto the device. These are stress ratings only. Operation of the device at these or at any other conditions above those given below is not implied. Exposure to limiting values for extended periods may affect device reliability.Where application information is given, it is advisory only and does not form part of thespecification.4.1 Absolute maximum ratingsSymbol Parameter Min Max UnitVCC Supply voltage–0.3 3.6VVoltage ramp on VCC72535000µs/VV_IO Supply voltage, I/O–0.3 3.6VVoltage ramp on V_IO72535000µs/VV_BCKP Supply voltage, backup domain–0.3 3.6VVoltage ramp on V_BCKP725µs/VVin Input voltage, digital pins–0.3V_IO + 0.3V(max 3.6)Ipin Max source / sink current, digital pins8-1010mAICC_RF Max source current, VCC_RF100mAP rfin RF input power on RF_IN9+15dBmT amb Ambient temperature–40+85°CT s Storage temperature–40+85°CTable 10: Absolute maximum ratingsThe product is not protected against overvoltage or reversed voltages. Voltage spikesexceeding the power supply voltage specification, given in the table above, must be limited to values within the specified boundaries by using appropriate protection diodes.4.2 Operating conditionsTable 11shows the general operating conditions. Table 12shows the electrical parameters for digital I/O.Symbol Parameter Min Typical Max UnitsVCC Supply voltage 2.7 3.0 3.6VV_IO Supply voltage, I/O 2.7 3.0 3.6VV_BCKP Supply voltage, backup domain 1.65 3.6VVCC_RF VCC_RF output voltage VCC-0.1VICC_RF VCC_RF output current50mANF tot Receiver chain noise figure2dB7Exceeding the voltage ramp speed may permanently damage the device.8SAFEBOOT_N pin has an internal 1 kΩ series resistor. With a 3.3 V supply, the current is limited to 3.3 mA.9Test conditions TBCSymbol Parameter Min Typical Max UnitsExt_gain10External gain at RF_IN, low gain mode (default)TBD dBExternal gain at RF_IN, bypass mode TBD dBT opr Operating temperature-40+85°CTable 11: General operating conditionsSymbol Parameter Min Typical Max UnitsV in Input pin voltage range0V_IO VV il Low-level input voltage0.63VV ih High-level input voltage0.68 x V_IO VV ol Low-level output voltage, Iout = -2 mA0.4VV oh High-level output voltage, Iout = 2 mA V_IO - 0.4VR pu, IO Pull-up resistance, Digital IO1151772kΩR pu, SAFEBOOT_N Pull-up resistance, SAFEBOOT_N1251772kΩR pu, RESET_N Pull-up resistance, RESET_N71013kΩTable 12: Digital IOOperation beyond the specified operating conditions can affect device reliability.To trigger a reset, the minimum low period for RESET_N is 1 ms.4.3 Indicative power requirementsTable 13 lists examples of the total system supply current for VCC and V_IO. Table 14 shows current consumptions for the backup modes.These values are provided for customer information only, as an example of typical current requirements. They are characterized on samples using a cold start command. Actualpower requirements can vary depending on FW version used, external circuitry, number of satellites tracked, signal strength, type and time of start, duration, internal LNA gain mode, and test conditions.Symbol Parameter Conditions GPS GPS+GAL GPS+GAL+GLO GPS+GAL+BEIUnitI PEAK Peak current Acquisition25252525mAAcquisition 6.57.09.010.5mA I VCC13Current at VCCTracking(Continuous mode)6.0 6.07.08.0mAAcquisition 2.2 2.2 2.3 2.3mA I V_IO14Current at V_IOTracking(Continuous mode)2.2 2.2 2.3 2.3mA Table 13: Typical currents to calculate the indicative power requirementsSymbol Parameter Conditions Typ.Unit I V_BCKP Total current in hardware backup mode V_BCKP = 3.3 V / V_IO = VCC = 0 V32µA 10The internal LNA gain is configurable.11TXD, RXD, TIMEPULSE, EXTINT, SCL, SDA, and LNA_EN.12The SAFEBOOT_N pin has an additional 1 kΩ series resistor.13Voltage at VCC = 3.0 V. Internal LNA set to low gain. Simulated signal using power levels of -130 dBm.14Voltage at V_IO = 3.0 V.Symbol Parameter Conditions Typ.Unit Total current in hardware standby mode V_IO = 3.3 V / VCC = 0 V46µAI VCC, V_IO15Total current in software standby mode V_IO = 3.3 V / VCC = 3.3 V TBDµA Table 14: Backup currents to calculate the indicative power requirementsAll values in Table 13 and Table 14 are measured at 25 °C ambient temperature and with the internal LNA set to low gain.SBAS and QZSS are activated in all measurements.15I VCC, V_IO includes currents flowing into VCC and V_IO.5 Communication interfacesThe receiver allows communication over UART and I2C16 interface.All the inputs have internal pull-up resistors in normal operation and can be left open if not used. All the PIOs are supplied by V_IO, therefore all the voltage levels of the PIO pins are related to V_IO supply voltage.5.1 UARTThe UART interface supports configurable baud rates. Hardware flow control is not supported.Symbol Parameter Min Max UnitR u Baud rate4800921600bit/sΔTx Tx baud rate accuracy-1%+1%-ΔRx Rx baud rate tolerance-2.5%+2.5%-Table 15: UART specifications5.2 I2CAn I2C-compliant interface is available for communication with an external host CPU. The interface is compatible with the Fast-mode of the I2C industry standard, allowing a maximum bit rate of 400 kbit/s17.5.3 Default interface settingsInterface SettingsUART•9600 baud, 8 bits, no parity bit, 1 stop bit.•Input messages: NMEA and UBX.•Output messages: NMEA GGA, GLL, GSA, GSV, RMC, VTG and TXT.I2C•7-bit I2C address (0x42).•Input messages: NMEA and UBX.•Output messages: NMEA GGA, GLL, GSA, GSV, RMC, VTG and TXT.Table 16: Default interface settings16I2C is a registered trademark of Philips/NXP.17External pull-up resistors are needed to achieve 400 kbit/s communication speed as the internal pull-up resistance can be very large.6 Mechanical specificationFigure 3: MAX-M10S mechanical drawing7 Labeling and ordering informationThis section provides information about product labeling and ordering.7.1 Product labelingThe labeling of the MAX-M10S package provides product information and revision information. For more information contact u-blox sales.Figure 4: Location of product type number on MAX-M10S label7.2 Explanation of product codesThree product code formats are used. The Product name is used in documentation such as this data sheet and identifies all u-blox products, independent of packaging and quality grade. The Ordering code includes options and quality, while the Type number includes the hardware and firmware versions.Table 17 details these three different formats for the MAX-M10S.Format Structure Product codeProduct name PPP-TGGV MAX-M10SOrdering code PPP-TGGV-NNQ MAX-M10S-00BType number PPP-TGGV-NNQ-XX MAX-M10S-00B-00Table 17: Product code formatsThe parts of the product code are explained in Table 18 .Code Meaning ExamplePPP Product family MAXTGG Platform M10 = u-blox M10V Variant S = Standard precision, ROM, LNA, and SAW filterNNQ Option / Quality grade NN: Option [00...99]Q: Grade, A = Automotive, B = ProfessionalXX Product detail Describes hardware and firmware versionsTable 18: Part identification code7.3 Ordering codesOrdering code Product RemarkMAX-M10S-00B u-blox MAX-M10S module, professional gradeTable 19: Product ordering codesProduct changes affecting form, fit or function are documented by u-blox. For a list ofProduct Change Notifications (PCNs) see our website at: https:///en/product-resources.UBX-20035208 - R017 Labeling and ordering information Page 16 of 19Related documents[1]MAX-M10S Integration manual, UBX-20053088[2]u-blox M10 SPG 5.00 Interface description, UBX-20048810For regular updates to u-blox documentation and to receive product change notifications please register on our homepage https://.UBX-20035208 - R01Related documents Page 17 of 19Revision historyRevision Date Name Status / comments 0121-Dec-2020imar, jesk, msul, rmak Objective specificationContactFor complete contact information visit us at .u-blox OfficesNorth, Central and South America Headquarters Asia, Australia, PacificEurope, Middle East, Africau-blox America, Inc.u-blox AG u-blox Singapore Pte. Ltd.Phone:+1 703 483 3180Phone:+41 44 722 74 44Phone:+65 6734 3811E-mail:******************E-mail:***************E-mail:******************Support:******************Support:********************* Regional Office West Coast Regional Office AustraliaPhone:+1 408 573 3640 Phone:+61 3 9566 7255E-mail:****************** E-mail:*******************Support:********************* Technical Support Regional Office China (Beijing) Phone:+1 703 483 3185 Phone:+86 10 68 133 545E-mail:********************* E-mail:******************Support:********************* Regional Office China (Chongqing) Phone:+86 23 6815 1588E-mail:******************Support:********************* Regional Office China (Shanghai)Phone:+86 21 6090 4832E-mail:******************Support:********************* Regional Office China (Shenzhen) Phone:+86 755 8627 1083E-mail:******************Support:********************* Regional Office IndiaPhone:+91 80 4050 9200E-mail:******************Support:********************* Regional Office Japan (Osaka)Phone:+81 6 6941 3660E-mail:******************Support:********************* Regional Office Japan (Tokyo)Phone:+81 3 5775 3850E-mail:******************Support:********************* Regional Office KoreaPhone:+82 2 542 0861E-mail:******************Support:********************* Regional Office TaiwanPhone:+886 2 2657 1090E-mail:******************Support:*********************。
MODELSIM系统函数总结

篇一:modelsim仿真小结modelsim仿真小结modelsim的基本仿真流程大致分以下几个步骤:建库、编译工程、前后仿真、调试等。
modelsim 仿真既可以在modelsim界面操作,也可以用do文件实现,这里结合学习的教程、网上看到的资料,和实际遇到的一些问题,分别做一整理小结。
1. 建库建库包括altera 库和xilinx库,同时都包括verilog和vhdl。
这里只建了verilog库,vhdl和verilog步骤相同。
对于altera库主要包括lpm元件库、mega_function库atera_mf、altera原语库altera_primitive和各器件系列模型库。
前三种是调用altera模块的必备库,第四种是进行综合后功能仿真和布线后时序仿真需要的库,和器件系列有关,只选对应系列即可。
altera库创建和编译步骤如下:a) 在modelsim安装目录下新建文件夹,命名altera_lib,以存放编译后的库文件,可以在altera_lib 下新建verilog和vhdl两个子文件夹,分别存放verilog和vhdl库。
b) 打开modelsim,新建library,file ->new->library ..c) 如下图,创建lpm库,路径e:\modeltech_10.1a\altera_lib\verilog\lpm到此,lpm库建立完毕。
e) 同理,建立altera_mf库添加 altera_mf.v ,建立primitive库添加altera_primitive.v建立各系列的模型库,命名可用系列名加_ver“xxx_ver”,也可随意吧,添加各系列的xxx_atoms.v。
这里,也可以把以上库放在一个文件夹,这样做简单,一次就搞定,分开也就是条理清楚,没人去看,所以没必要。
f) 修改modelsim.ini文件,为的是让modelsim能自动map到已经编译的这些库上。
JBL AC2212 00 两路扬声器说明说明书

AC2212/00 Compact 2-Way Loudspeakerwith 1 x 12” LFKey Features:u100° x 100° Coverage.u P T™ Progressive Transition™Waveguide for good pattern controlwith low distortion.u B i-Amp/Passive Switchable.u O ptional U-Bracket for easy installation.u O ptional planar array frame kit(see AE Series Array Guide).Applications:u L ecture hallsu H ouses of worshipu C orporate learning centersu S mall performing arts facilitiesu T heatrical sound designu A uditoriumsu S ports facilitiesu T hemed entertainment venuesAC2212/00 is a compact 2-way full-range loudspeaker system comprised of one 300 mm (12 in) low frequency drive r and one 38 mm (1.5 in) exit/ 44 mm (1.75 in) voice-coil compression driver. The PT Progressive Transition waveguide provides wide 100° by 100° coverage. High-slope passive crossovers minimize band overlap.The cabinet is fitted with M10 threaded suspension points. Optional U-bracket, as well as pre-engineered array bracketryis available for easy installation. Four threaded inserts located on back ofthe enclosure allow attachment of an Omnimount™ or simila r mounting bracket.AC2212/00 is part of JBL’s AE Application Engineered Series, a versatil e family of loudspeakers for a wide variety of fixed installation application s.Specifications:System:Frequency Range1 (-10 dB): 50 Hz – 19 kHzFrequency Response1 (±3 dB): 55 Hz – 17 kHzCoverage Pattern: 100° x 100°Directivity Factor (Q): 7.1Directivity Index (DI): 8.5 dBCrossover Modes: Bi-amp/Passive switchablePassive Crossover Slopes2: 4th order (24 dB/oct) Transitional HP & LP, 1.3 kHzTransducer Power Rating (AES)3: L F: 300 W (1200 W peak), 2 hrs250 W (1000 W peak), 100 hrsHF: 50 W (200 W peak), 2 hrsLong-Term System Power Rating (IEC)4: Passive mode: 250 W (1000 W peak), 100 hrsMaximum SPL5: B i-amp mode:LF: 120 dB-SPL cont avg (126 dB peak)HF: 126 dB-SPL cont avg (132 dB peak)Passive mode:120 dB-SPL cont avg (126 dB peak)System Sensitivity6 (1W @ 1m): Passive mode: 95 dB SPLTransducers:Low Frequency Driver: 1 x JBL M112-8 300 mm (12 in) driver with 63 mm (2.5 in) voice coilNominal Impedance: 8 ohmsSensitivity6 (1W @ 1m, within operational band): 95 dB SPLHigh Frequency Driver: J BL 2418H-1/MTA, 38 mm (1.5 in) exit compression driver, 44 mm(1.75 in) voice coilNominal Impedance: 8 ohmsSensitivity (1W @ 1m): 109 dB SPLWaveguide: PT-F1010HFPhysical:Enclosure: T rapezoidal with 15 degree side angles, 16 mm (5/8 in) exterior grade11-ply Finnish birch plywoodSuspension Attachment: 15 points (4 top, 4 bottom, 2 each side, 3 rear), M10 threaded hardware.4 x M8 on rear for MultiMount® MM-022-BT,MM-024-BT, or MM-020-CMFinish: Black DuraFlex™ finish. White available upon request.Grille: P owder coated 14 gauge perforated steel, with acoustically transparentblack foam backing.Input Connector: N L4 Neutrik Speakon® and CE-compliant covered barrier stripterminals. Barrier terminals accept up to 5.2 sq mm (10 AWG) wire ormax width 9 mm (.375 in) spade lugs. Speakon in parallel with barrierstrip for loop-through.Environmental Specifications: Mil-Std 810; IP-x3 per IEC529.Dimensions (H x W x D): 548 x 355 x 352 mm(21.6 x 14.0 x 13.9 in)Net Weight: 19.1 kg (42 lb)Optional Accessories: M10 x 35 mm forged shoulder eyebolts with washersU-Bracket MTU-4Optional planar array frame kit. See AE Series Bracket GuideBi-amp mode, with recommended active tuning.Resultant engineered acoustical response of crossover network and components.AES standard, one decade pink noise with 6 dB crest factor within device’s operational band, free air. Standard AES 2 hr rating pluslong-term 100 hr rating are specified for low-frequency transducers.IEC standard, full bandwidth pink noise with 6 dB crest factor, 100 hours.Calculated based on power rating and sensitivity, exclusive of power compression.Anechoic sensitivity in free field, no additional sensitivity gain from boundary loading.JBL continually engages in research related to product improvement. Changes introduced into existing products without notice arean expression of that philosophy.u AC2212/00 Compact 2-Way Loudspeaker with 1 x 12” LFHorizontal 1/3 Octave PolarsSS AC2212/00CRP 10M 8/16u AC2212/00 Compact 2-Way Loudspeaker with 1 x 12” LFVertical 1/3 Octave PolarsJBL Professional 8500 Balboa Boulevard, P.O. Box 2200Northridge, California 91329 U.S.A.© Copyright 2016 JBL ProfessionalA Harman International Company。
Pololu 3pi 无人机说明书
Sample Project: RC 3pi1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22. Materials and Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33. Construction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44. Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65. Suggested Improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.IntroductionA radio-controlled 3pi with an RC transmitter.The3pi robot[/catalog/product/975]is complete mobile platform designed to excel in line-following and maze-solving competitions.The3pi has user accessible I/O lines that can be connected to different sensors to expand its behavior beyond line-following and maze-solving.This project shows one possible configuration where a two-channel radio-control(RC)receiver connected to the3pi enables manual operation of the platform with minimal soldering.Many other sensors could be used to expand the3pi,including distance sensors to make a wall-following robot.[/docs/0J26]By connecting an RC receiver and running the program detailed in Section4,you can turn your3pi into a radio-controlled vehicle that can drive at speeds in excess of1m/s and turn on a dime.A signal mixing algorithm makes two-channel control easy and intuitive,and the3pi turns off its motors if it goes out of range,starts receiving bad signals, or if the transmitter is turned off. Here is a video of the RC 3pi in action:2.Materials and ToolsBeyond the Pololu3pi robot+USB programmer+cable combo[/catalog/product/747],you will need a few other materials for this project.You only need the materials listed under the“required”section to make the RC3pi work,but the optional header makes it easier to reconfigure your3pi with other sensors later by allowing you to unplug your RC receiver.Required• a two-channel radio-control transmitter/receiver set that outputs standard RC servo pulses• 2 short female to female servo cables[/catalog/product/779]•4wires(such as those from our140-piece wire kit[/catalog/product/312]if you don’t have any wires lying around)•double-sided foam tape•a soldering iron[/catalog/product/156]and solderOptional•10.100" (2.54 mm) female header: 2×7-pin, straight[/catalog/product/1027]A 2×7 female header soldered into the 3pi expansion pin holes.cable to a channel on the RC receiver.Then,with theThe wiring of a radio-controlled 3pi.use double-sided tape to secure the RC receiver and the picture below. Note that the receiver might fit better if you first remove the LCD.4.SoftwareThe final step is to insert fresh batteries into your3pi and use an AVR ISP programmer(like our Orangutan USB programmer[/catalog/product/740])to program it with the following code.For information on programming your3pi,please visit the programming your3pi[/docs/0J21/6]section of the3pi robot user’s guide[/docs/0J21].You can download the AVR Studio project with the already compiled hex file here: 3piRC.zip[/file/download/3piRC.zip?file_id=0J193](38k zip)/*** RC 3pi** This 3pi robot program reads two standard radio-control (RC) channels and mixes* them into motor control. Channel zero (connected to the PD0 input)* handles forward and reverse, and channel one (connected to the* PC5 input) handles turning.**/#include <avr/io.h>#include <avr/interrupt.h>#include <pololu/3pi.h>/*** Receiver pulse timings** Standard RC receivers output high pulses between 0.5 ms and 2.5 ms with a neutral* position of about 1.5 ms. If your RC receiver operates with different pulse* widths, change these constants below.** The units of these constants is ticks of Timer1 which is set to tick every 3.2* microseconds.**/const int minPulseTime = 156; // 0.5 msconst int neutralPulseTime = 469; // 1.5 msconst int maxPulseTime = 782; // 2.5msconst int maxLowPulseTime = 3000; // 9.6msstruct ChannelStruct{volatile unsigned int prevTime;volatile unsigned int lowDur;volatile unsigned int highDur;volatile unsigned char newPulse;unsigned int pulse;unsigned char error;};struct ChannelStruct ch[2];/** Pin Change interrupts* PCI0 triggers on PCINT7..0* PCI1 triggers on PCINT14..8* PCI2 triggers on PCINT23..16* PCMSK2, PCMSK1, PCMSK0 registers control which pins contribute.** The following table is useful:** AVR pin PCINT # PCI #* --------- ----------------- -----* PB0 - PB5 PCINT0 - PCINT5 PCI0* PC0 - PC5 PCINT8 - PCINT13 PCI1* PD0 - PD7 PCINT16 - PCINT23 PCI2**/// This interrupt service routine is for the channel connected to PD0ISR(PCINT2_vect){// Save a snapshot of PIND at the current timeunsigned char pind = PIND;unsigned int time = TCNT1;if (pind & (1 << PORTD0)){// PD0 has changed to high so record the low pulse's durationch[0].lowDur = time - ch[0].prevTime;}else{// PD0 has changed to low so record the high pulse's durationch[0].highDur = time - ch[0].prevTime;ch[0].newPulse = 1; // The high pulse just finished so we can process it now }ch[0].prevTime = time;}// This interrupt service routine is for the channel connected to PC5ISR(PCINT1_vect){// Save a snapshot of PINC at the current timeunsigned char pinc = PINC;unsigned int time = TCNT1;if (pinc & (1 << PORTC5)){// PC5 has changed to high so record the low pulse's durationch[1].lowDur = time - ch[1].prevTime;}else{// PC5 has changed to low so record the high pulse's durationch[1].highDur = time - ch[1].prevTime;ch[1].newPulse = 1; // The high pulse just finished so we can process it now }ch[1].prevTime = time;}/*** updateChannels ensures the recevied signals are valid, and if they are valid* it stores the most recent high pulse for each channel.*/void updateChannels(){unsigned char i;for (i = 0; i < 2; i++){cli(); // Disable interruptsif (TCNT1 - ch[i].prevTime > 35000){// The pulse is too long (longer than 112 ms); register an error// before it causes possible problems.ch[i].error = 5; // wait for 5 good pulses before trusting the signal }sei(); // Enable interruptsif (ch[i].newPulse){cli(); // Disable interrupts while reading highDur and lowDurch[i].newPulse = 0;unsigned int highDuration = ch[i].highDur;unsigned int lowDuration = ch[i].lowDur;sei(); // Enable interruptsch[i].pulse = 0;if (lowDuration < maxLowPulseTime ||highDuration < minPulseTime ||highDuration > maxPulseTime){// The low pulse was too short or the high pulse was too long or too shortch[i].error = 5; // Wait for 5 good pulses before trusting the signal }else{// Wait for error number of good pulsesif (ch[i].error)ch[i].error--;else{// Save the duration of the high pulse for use in the channel mixing// calculation belowch[i].pulse = highDuration;}}}}}int main(){ch[0].error = 5; // Wait for 5 good pulses before trusting the signalch[1].error = 5;DDRD &= ~(1 << PORTD0); // Set pin PD0 as an inputPORTD |= 1 << PORTD0; // Enable pull-up on pin PD0 so that it isn't floatingDDRC &= ~(1 << PORTC5); // Set pin PC5 as an inputPORTC |= 1 << PORTC5; // Enable pull-up on pin PC5 so that it isn't floatingdelay_ms(1); // Give the pull-up voltage time to risePCMSK1 = (1 << PORTC5); // Set pin-change interrupt mask for pin PC5PCMSK2 = (1 << PORTD0); // Set pin-change interrupt mask for pin PD0PCIFR = 0xFF; // Clear all pin-change interrupt flagsPCICR = 0x06; // Enable pin-change interrupt for masked pins of PORTD// and PORTC; disable pin-change interrupts for PORTB sei(); // Interrupts are off by default so enable themTCCR1B = 0x03; // Timer 1 ticks at 20MHz/64 = 312.5kHz (1 tick per 3.2us)while (1) // Loop forever{updateChannels();// Every 100 ms display the pulse timings on the LCD// this is good for debugging your RC 3pi but not necessary if// you remove the LCDif (get_ms() % 100){lcd_goto_xy(0, 0);print("ch1 ");// Multiplying by 32/10 converts ticks to microsecondsprint_unsigned_long(ch[0].pulse * 32 / 10);print(" ");lcd_goto_xy(0, 1);print("ch2 ");print_unsigned_long(ch[1].pulse * 32 / 10);}if (ch[0].error || ch[1].error){// If either channel is not getting a good signal, stopset_motors(0, 0);}else{/*** Mix calculation** This calculation mixes the pulses from the two channels* to make control intuitive. Channel 0 controls foward and* reverse. When the pulse is longer than neutralPulseTime it* adds to m1 and m2; when the pulse is shorter than nuetralPulseTime* it subtracts from m1 and m2. Channel 1 controls rotation. When the* pulse is longer than neutralPulseTime it subtracts from m1 and adds* to m2; when the pulse is shorter than neutralPulseTime it adds to m1* and subtracts from m2. m1 and m2 are then scaled so they fit within* -255 to 255 range.** Calibration** Your transmitter/receiver might treat channels 0 and 1 differently* than the receiver this code was developed for. If your 3pi turns* when you expect it to go straight or vice versa, you may need to flip* a sign in the calculation below or swap the connections at the receiver.**/long m1 = (neutralPulseTime - (int)ch[0].pulse) +((int)ch[1].pulse - neutralPulseTime);long m2 = (neutralPulseTime - (int)ch[0].pulse) -((int)ch[1].pulse - neutralPulseTime);m1 = m1 * 255 / minPulseTime;m2 = m2 * 255 / minPulseTime;set_motors(m1, m2);}}// This part of the code is never reached. A robot should// never reach the end of its program, or unpredictable behavior// will result as random code starts getting executed. If you// really want to stop all actions at some point, set your motors// to 0,0 and run the following command to loop forever://// set_motors(0,0);// while(1);}Please note that individual transmitter/receiver systems vary,so you might need to modify this code some before it will work well with your particular system.If you run the program with the LCD connected,it will report back the duration of the pulses it’s detecting on each channel in microseconds.You can then use the trim settings on your transmitter to adjust the neutral points to1.5ms,or you can modify the neutral points in the code.You also might want to characterize the ranges of the pulses and adjust the motor speed scaling so that the motors reach full speed when the transmitter sticks are at their full stly,you might need to change some of the signs in the channel mixing formulas so that the robot responds intuitively(e.g.so that it turns left rather than right when you move the stick left).5.Suggested Improvements•Program the3pi to automatically measure the neutral,maximum,and minimum value of each channel so that responds better to the transmitter.Doing this will ensure that the robot is at a full stop when the transmitter sticks are in their neutral positions and that the motors reach full speed appropriately when the sticks are at the ends of their ranges.•Program the3pi to drive autonomously when the transmitter is off and drive under your control while the transmitter is on. This would let you use the RC system as an emergency manual override.•Use the RC system to control parameters of an autonomous program,such as the maximum speed of a line follower or the direction a maze solver should go at the next intersection.•Use a transmitter/receiver with more channels to give you control over more3pi functions.You could connect these extra channels to LCD-port I/O lines and use them to trigger additional actions such as playing sounds with the buzzer.The easiest way to add a third channel would be via a PORTB pin,since you could use pin-change interrupt0to read the pulses just like pin-change interrupt1reads the pulses on PC5and pin-change interrupt2reads the pulses on PD0.If you try to use two pins on the same port to read separate channels, the required changes to the code become more complicated.6.ConclusionWith the addition of an RC receiver and some simple code,the3pi can become a radio-controlled robot with a nice speed and excellent turning ability.We encourage you to try to improve upon this project by adding more sensors[/catalog/category/7]or even by merely enhancing the code.Please join us on our robotics forum[/viewforum.php?f=29]to ask questions,give feedback,or share your3pi projects.We would love to hear about your experiences implementing this project on your own3pi, and we would be delighted to see any improvements or alterations you make!6. Conclusion Page 11 of 11。
ML10 MP10 视频墙挂载说明书
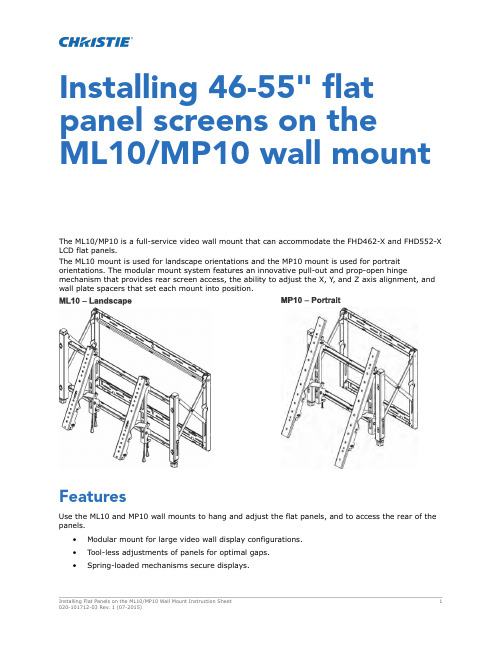
Installing 46-55" flat panel screens on the ML10/MP10 wall mountThe ML10/MP10 is a full-service video wall mount that can accommodate the FHD462-X and FHD552-X LCD flat panels.The ML10 mount is used for landscape orientations and the MP10 mount is used for portrait orientations. The modular mount system features an innovative pull-out and prop-open hingemechanism that provides rear screen access, the ability to adjust the X, Y , and Z axis alignment, andwall plate spacers that set each mount into position.FeaturesUse the ML10 and MP10 wall mounts to hang and adjust the flat panels, and to access the rear of the panels.•Modular mount for large video wall display configurations.•Tool-less adjustments of panels for optimal gaps.•Spring-loaded mechanisms secure displays.•Pull-out/prop-open mechanism provides quick service access.•Integrated cable management tie-backs make display-to-display cabling simple.•Included security hardware prevents the mount from extending out from the wall.•Adjustable VESA® mounting hole patterns in 100 mm (3.9”) increments, starting at 200 x 200 mm (7.9” x 7.9”) up to 700 x 400 mm (27.5” x 15.7”) for ML10 LCD mounts. Additionalpatterns supported with adapter plates.•Adjustable VESA® mounting hole patterns in 100 mm (3.9”) increments, starting at 200 x 200 mm (7.9” x 7.9”) up to 600 x 400 mm (23.6” x 15.7”) for MP10 LCD mounts. Additionalpatterns supported with adapter plates.Safety warnings and cautionsTo prevent personal injury and to protect the device from damage, read and follow these safety precautions.Warning! Failure to comply with the following could result in death or serious injury.•The supporting structure must safely support the combined load of the product, all attached hardware, and components following all local safety standards and regulations.• A minimum of two people or lift equipment is required to safely lift, install, or move the product.•Always handle the screen from its sides. Do not touch the inside of the screen.•Christie products must be installed and serviced by Christie qualified technicians.Caution! Failure to comply with the following could result in minor or moderate injury.•Do not over-tighten hardware.•This product is intended for indoor use only.Types of installationsLearn the supported surfaces for installing the wall mounts.Required kitsLearn the kits that are required for installing the wall mounts.•LCD Mount 40-65” ML10 (Landscape) P/N: 135-101103-xx•LCD Mount 40-65” MP10 (Portrait) P/N: 135-104106-xxOptional kits•LCD Spacer Kit 55” ML10 (135-102104-xx)•LCD Spacer Kit 55” MP10 (135-107109-xx)Other available resources•LCD Panel FHD552-X User Manual (P/N: 020-000741-xx)•LCD Panel FHD462-X User Manual (P/N: 020-000769-xx)•ML10/MP10 Spacer Kit for the FHD552-X Instruction Sheet (P/N: 020-100728-xx) Required partsA Pull out mount assembly (Qty. 1)H M6 x 12 mm socket pin screw (Qty. 4)B Adapter Bracket (Qty. 2)I M8 x 16 mm socket pin screw (Qty. 4)C#14 x 2.5” hex head wood screw (Qty. 5)J4mm Allen wrench (Qty. 1)E Fender washer (Qty. 4)-Mesh sleeve (not shown) (Qty. 1)F Nylon shoulder washer (Qty. 4)-Cable tie (not shown) (Qty. 2)G M5 x 10 mm socket pin type-F screw (Qty. 2)Required toolsEnsure the appropriate tools are available during the installation.•Stud finder (edge-to-edge stud finder is recommended)•Phillips® screwdriver•Socket wrench•Pencil•Drill•3/8" socket•5/16” (8 mm) bit for concrete and cinder block walls•5/32” (4 mm) bit for wood stud walls•LevelInstalling the wall mountLearn how to install the wall mounts onto different surfaces.The maximum load capacity of the wall mount is 125 lbs (57 kg). Illustrations are graphical representations only and are provided to enhance the understanding of the written material.When installing the wall mounts, ensure there is proper spacing between the mounts to accommodate the panels. Always start with the bottom left display in the array.1.Measure the width and height of the display panel.2.Locate the center of the bottom left display.3.To identify where the mount for the display to the right of the first display should be installed,measure the width of the display panel from the center of the first display to the center of the second display (X).4.Install all panels in the bottom row.Install all rows starting with the far left display.5.To identify where the mount for the second row of displays should be installed, measure theheight of the display panel from the top of the bottom left display to the top of the firstdisplay in the second row (Y).Installing the mount to wall studs, plywood, drywall over wall studsLearn how to install the wall mounts onto wall studs, plywood, or drywall.Hardware provided is for attaching the mount through standard thickness drywall or plaster into wood studs. Installers are responsible for providing the hardware for other types of mounting situations. When installing the wall mounts on a wood stud wall covered with plywood, verify that the wood studs are a minimum of 2" x 4" nominal size and plywood is a minimum 1/2" (13 mm) thickness. Plywood may be covered by drywall up to 5/8" thick.e an “edge-to-edge” stud finder to locate the edges of the stud.2.Based on their edges, draw a vertical line down the stud center.3.Place the pull out mount assembly on the wall to use as a template, and verify the pull outmount is level on the center line of the stud.4.Mark the center of the four mounting holes.In the landscape orientation, make sure there is a minimum 16” (406.4 mm) horizontaldistance between the #14 x 2.5” screws.5.Drill four 5/32" (4 mm) diameter holes 2-1/2" (65 mm) deep.6.Tighten the four #14 x 2.5" wood screws and fender washers so that the wall plate is firmlyattached, but do not over-tighten.Never tighten in excess of 80 in-lbs (9Nm).Installing the mount to solid concrete or cinder blockLearn how to install the wall mounts onto solid concrete or cinder block walls.Warning! Failure to comply with the following could result in death or serious injury.•Concrete must be a minimum of 2000 psi density. Lighter density concrete may not hold the concrete anchor.•The supporting structure must safely support the combined load of the product, all attached hardware, and components following all local safety standards and regulations.When installing wall mounts onto cinder blocks, verify that you have a minimum of 1-3/8" (35 mm) of actual concrete thickness in the hole to be used for the concrete anchors. Cinder block must meet ASTM C-90 specifications and a minimum nominal width of 8".1.Place the pull out mount assembly on the wall to use as a template, and verify the pull outmount is level.2.Mark the center of the four mounting holes.In the landscape orientation, make sure there is a minimum 16” (406.4 mm) horizontaldistance between the #14 x2.5” screws.Landscape orientation Portrait orientatione a standard electric drill on slow setting to drill four 5/16” (8 mm) diameter holes to aminimum depth of 2.5” (64 mm).To avoid breaking out the back of the hole when entering a void or cavity, do not use ahammer drill. On cinder block walls, mount in a solid part of the block, generally 1" (25 mm) minimum from the side of the block. Do not drill into mortar joints.4.Insert anchors into the holes flush with the wall.Never attach concrete expansion anchors to concrete covered with plaster, drywall, or otherfinishing material. If mounting to concrete surfaces covered with a finishing surface isunavoidable, the finishing surface must be counter bored, as shown in the image below.5.Place the pull out mount assembly over the anchors and secure it with four #14 x 2.5”screws, and fender washers.Make sure concrete anchors do not pull away from the concrete when tightening screws. Ifthe wall is covered with plaster, drywall, or other finishing material thicker than 5/8" (16mm), custom fasteners must be supplied by the installer.6.Tighten the four #14 x 2.5" wood screws and fender washers so that the wall plate is firmlyattached, but do not over-tighten.Never tighten in excess of 80 in-lbs (9Nm).Installing the mount to a Unistrut P series metal frameLearn how to install a wall mount onto the Unistrut metal frame channel.When installing Peerless wall mounts to Unistrut "P" Series metal framing channels, the channels must be installed and supported per the Unistrut design specifications. Use only compatible Unistrut hardware. Never exceed maximum load capacity of Unistrut channel or supporting surface.1.Insert the 1/4-20 Unistrut channel nut with spring on the Unistrut metal frame channel.2.Level and install the Unistrut P series metal frame channel to the wall according to theinstructions included with the Unistrut frame.3.Attach the wall mount to the Unistrut metal frame channel with the 1/4-20 hex head screws.Installing the mount to the F100 frameLearn how to install the wall mounts onto the F100 frame.1.Make sure all components within the video wall are level, starting with the P100 Pedestal. Ifthe floor surface is not level adjust the feet on the pedestal.For information on installing the P100 pedestal and the F100 frame, see P100 Pedestal andF100 Frame for FHD552-X Installation Manual (020-101714-xx).2.Install the F100 Frame onto the pedestal.If the F100 Frame is used as stand alone unit it must be leveled before securing the wallmount.3.Before installing the wall mount use a standard level to check alignment on the horizontal andvertical edge of the frame.4.Position the wall mount within the center of the frame, aligning it with the mounting holes.5.Tighten the wall mount to the F100 Frame using the four M6 screws.Never tighten in excess of 80 in- lbs (9Nm).6.For good screen planarity within a video wall adjust the top knob of the adapter bracket toachieve a 9 mm (0.35”) gap.7.Adjust the bottom knob of the adapter bracket to achieve a 14 mm (0.55”) gap. If furtheradjustment is required, leave a 1 mm (0.04”) minimum clearance to allow the bracket to be easily released.8.Mount the adapter bracket and use a level to ensure it is flush.9.Turn the knobs located on the bottom of the mount to adjust the position until it is verticallycentered.10.Check that the mount is level. If necessary fine adjust the vertical position.11.Adjust the vertical position of the panel to leave a minimum 1 mm (0.04”) gap betweenpanels so the weight of the panels do not rest on the panels underneath.Always adjust the X position of the panels individually, rather than pushing an entire row left to right. For example, if you are constructing a 3x3 video wall push the panels individually from the right and left sides, towards the center of the wall.Attaching the adapter brackets to the displayThe panel must have the adapter brackets installed before it can be attached to the wall bracket.Attach the adapter brackets to the back of the panel using four M6 x 12 mm socket pinscrews with a nylon shoulder washer, or four M8 x 15 mm socket pin screws, as shown below.Landscape orientationPortrait orientationAttaching the panel to the wall mountInstall the panel with the brackets onto the wall mount.1.Slide the adapter brackets into position.2.Loosely fasten the panel in place using the security screw.3.Adjust the panel until it is ±2”/50.8 mm from the center.4.To lock the panel in place, use a 4mm Allen wrench to tighten the security screws.Adjusting the pull out mount assemblyAlign the pull out mount.Use the knob to make fine-tuned adjustments to the pull out mount alignment.•Turn the knob clockwise to raise a side.•Turn the knob counter-clockwise to lower a side.Securing the display cablesDisplay cables can be routed through the top or bottom of the pull out mount assembly.e the cable ties and cable management slots on the pull out mount assembly to secure thedisplay cables.Landscape orientationPortrait orientation2.Bundle the cables with the mesh sleeve and cable ties.Opening and closing the pull out mount assemblyUnlock the mount to pull the panel out from the wall.1.Release the locking tab to open the pull out mount assembly.2.Push or pull up on the locking tab.To avoid damaging the LCD panel always release both locking tabs at the same time andmove the panel forwards evenly.Opening the adapter bracketsLift the bottom of the panel up and away from the pull out mount.To open the adapter brackets, pull down on the long back release cords while pulling thebottom of the display away from the wall.Two people are required when opening the adapter brackets, one to release the left-siderelease cord and the other the right-side release cord. After the back release cords are pulled, the kick stand engages to hold the panel open.Landscape orientationPortrait orientationClosing the adapter bracketsTake caution when closing the adapter brackets to ensure the LCD panel is not damaged.1.Pull down on the short front release cords.Once the short cords are pulled, the kick stand will disengage. You may need to slightly pull the display away from the wall to release the kick stand.Landscape orientationPortrait orientation2.Gently guide it back into place as you close the brackets.Securing the pull out mount assembly (Optional) Prevent the locking tabs from releasing.Insert and tighten two M5 x 10 mm socket pin type-F screws into the locking tab.。
M10U3 Project导学案(整合学案)201311

高三年级英语导学案编写人:主备人:审核人:编号M10 Unit3 Project班级____________ 组别__________ 姓名_____________ Learning goals:1.Get to know some important information about drugs.2. Enable Ss to make a poster about the dangers of drugs.【预习自主探究】Key phrases1.吸毒L12.结局一团糟L13.反抗L54.产生不同的反应L125.副作用L146.在一些个例中L157.以药片形式服用L16 8.减肥药L179.戒烟L21 10.被称为镇静剂L2211.呼吸浅和脉搏微弱L24 12.一小勺L2713.例如海洛因 14.滑到成瘾的境地15.大量饮用L30 16.决定了惩罚的轻重17.从小的罚款到大笔罚款 18.拘留几天19.戒毒瘾 20.一生的污点21.人生倒转重新再次开始 22.寻求帮助【课堂交流展示】Ⅰ根据课文内容选择正确答案1. The passage is mainly aboutA. the dangers of taking drugs and the help drug users can seekB. why so many young people take illegal drugsC. the introduction to three main classes of illegal drugsD. the way of breaking drug addiction2. From the passage we can know _____.A. although all drugs can produce different reactions, they aren't all addictiveB. downers can make users feel relaxed so they're less addictive than uppersC. giving up taking drugs is difficult and painful, but worth the struggleD. only in a drug clinic can drug users get help to break addiction3. Which of the following doesn’t belong to the group?A. uppersB. downersC. LSDD. speed4. All of the following belong to uppers EXCEPT _______.A. heroinB. nicotineC. caffeineD. speed5. Which of the following is the common effect of the three groups of drugs?A. increasing the heart rateB. energetic and happyC. addictive physically and/or psychologicallyD. sleepyⅡ质疑讨论(Language points)1. case n. 箱子,盒子;情形,状况;事例,案例,病例a case for books 书橱,书箱 a case of theft 盗窃案There has been three suspicious cases of SARS. 已有三例SARS疑似病例。
星辰科技产品ID:HB30A10AME的10口USB3.0数据传输拓展板说明书
10 Port USB Hub with Power Adapter - Surge Protection - Metal Industrial USB 3.0 Data Transfer Hub - Din Rail, Wall or Desk Mountable - High Speed USB 3.1 Gen 1 5Gbps HubProduct ID: HB30A10AMEThis TAA compliant 10-port industrial USB 3.0 hub gives you thescalability and power supply flexibility you need in harsh industrial environments, product, and repair labs, conference rooms or office workstations. With its rugged industrial-grade metal housing, it is designed to meet the advanced requirements of connecting a high number of devices in factories and office environments.Perfect for Harsh EnvironmentsThis industrial USB hub delivers reliable performance with a metal, heavy-duty housing. It supports wide-range 7-24V DC terminal block input, giving you the flexibility to power the hub as required, based on your own power input capabilities.Perfect for factory environments, the rugged hub also supports a wide operating temperature range (0°C to 70°C) and offers surge and ESD protection to each USB port, which can help prevent damage to your connected devices.Connect & Charge More USB DevicesDesigned for a high volume of connections, this robust USB 3.0 hub offers 10 connection ports, for connecting more USB devices and peripherals.The hub also supports USB battery charging specification 1.2, delivering up to 2.4A on any port to a maximum of 50W total, so you can charge your mobile devices faster than traditional USB ports allow.Locate the Hub Where You Need It MostWith versatile installation options, you can install the hub where it’s best suited for your environment. With built-in mounting brackets and included DIN mount rails, you can securely mount the USB 3.0 hub to most surfaces such as a wall, under a desk or rack.It supports wide-range 7-24V DC terminal block input, giving you the flexibility to power the hub as required, based on your own power input capabilities. You have the option to power the industrial hub by connecting the hub directly to an outlet with the included external terminal block power adapter, for more convenient and flexible installation. offers an external power adapter, ITB20D3250, sold separately. The universal DC power adapter can be used as an alternative, back up or replacement power supply for ’s line of industrial USB hubs.Works with Older USB DevicesThe rugged USB hub supports the full 5Gbps bandwidth of USB 3.0 and is backward compatible with previous USB devices. You can connect your legacy peripherals alongside your newer USB 3.0 devices without any disruptions.The HB30A10AME is backed by a 2-year warranty and free lifetime technical support.Certifications, Reports and Compatibility Features•RUGGED & RELIABLE: With a metal housing, 15kV/8kV air/contactESD protection & 350W surge protection this heavy duty USB 3.0 hub reliably connects 10 USB devices in harsh, industrial environments •MOUNTING OPTIONS: This mountable USB hub securely installson/under a desk, to a wall or DIN rail using the built-in mountingears & included DIN brackets, a 6ft (1.8 m) USB 3.0 cable is alsoincluded•POWER FLEXIBILITY: For unique power requirements the USB 3.0 hub supports a +7-24 volt DC range, powered via DC drop, LPS witha terminal block or by AC outlet with the included power supplyadapter•POWER & CHARGE YOUR DEVICES: 10 USB 3.1 Gen 1 ports transferdata at 5Gbps with 2.4A (12W) of power on up to 4 ports or anycombination of lower power draw devices for up to 50W of totalshared power•THE ADVANTAGE: offers a 2-year warranty and free lifetime technical support on this hub with avariety of USB cables available to connect downstream devices (sold separately)Warranty 2 YearsHardware Bus Type USB 3.0Chipset ID Genesys Logic - GL3523Fast-Charge Port(s)YesIndustry Standards USB Battery Charging Specification Rev. 1.2USB 3.2 Gen 1 - Backwards compatible with USB 3.0, 3.0,and 1.1Interface USB 3.0Ports10USB-C Device Port(s)NoUSB-C Host Connection NoPerformance ESD Protection+/-15kV (Air)+/-8kV (Contact)Maximum Data Transfer Rate 5 GbpsMTBF126,106 HoursSurge Protection350W on the DFP and UFPType and Rate USB 3.0 - 5 Gbit/sUASP Support YesConnector(s)Connector Type(s)10 - USB 3.1 USB Type-A (9 pin, Gen 1, 5 Gbps) Female1 - USB Type-B (9 pin) USB 3.0 Female1 - Terminal Block (2 Wire)Software OS Compatibility OS Independent; No additional drivers or software requiredSpecial Notes / Requirements Note If connected to a USB 2.0 host port, performance may belimitedThis product is intended for use with terminal block poweronly – Standard AC adapter not availableSystem and Cable Requirements Host computer with an available USB 3.0 portIndicators LED Indicators 1 - Power (Green) Power Input Current 1.4AInput Voltage100 - 240 ACOutput Current 3.25AOutput Voltage20V DCPlug Type Terminal Block (2 Wire)Power Consumption (In Watts)65WPower Source AC Adapter IncludedEnvironmental Humidity5%~95% RH (Non-condensing)Operating Temperature0°C to 70°C (32°F to 158°F)Storage Temperature-20°C to 85°C (-4°F to 185°F)Color BlackPhysicalCharacteristicsForm Factor IndustrialProduct Height30.000Product Length7.8 in [19.8 cm]Product Width55.000Weight of Product352.000PackagingPackage Height70.000InformationPackage Length295.000Package Width190.000Shipping (Package) Weight1362.000What's in the Box Included in Package 1 - USB Hub1 - USB 3.0 Host Cable1 - Universal Power Adapter (NA/JP, ANZ, UK, EU)2 - DIN Rail Brackets4 - Mounting Screws1 - Quick-Start GuideProduct appearance and specifications are subject to change without notice.。
牛津M10重点短语
你玩的时候我在干什么?------暑期个人学习总结------牛津英语高三复习之M10 重点短语积累M10 U1 READING-GRAMMAR1. 给施加压力put pressure on2.另外,此外on top of3. 全球危机global crisis4. 处于危险状态at risk / in danger5. 毫无疑问without doubt6. 处于十字路口at a crossroads7. 依靠,依赖be dependent on 8. 灾难的严重性the severity of the catastrophe9. 为了抗击饥荒in trying to fight hunger 10. 以危险中的人为目标target people at risk11. 落后于… fall behind … 12. 提高营养标准improve nutritional standards13. 一个长期问题的短期解决方法a short-term solution to a long-term problem14. 从…过渡到… switch from A to B 15. 维护尊严maintain one’s dignity16. 负债严重be heavily in debt 17. 贷款利息loan interest18. 削弱财政收入weaken finance 19. 感到经济拮据feel the economic squeeze20. 一方面,另一方面for one thing, for anotherTask - Project1. 盛大开业grand opening2. 展示,炫耀show off3. 收拾行李pack one’s suitcase4. 可持续发展sustainable development5. 敲响警钟set the alarm bells ringing6. 关注环境focus on the environment7. 将……付诸实施put… into practice 8. 洗澡have a shower9. 为电器供电power electrical equipment 10. 以很高的速度at a high rate11. 夺走性命claim / take one’s lives 12. 用光run out13. 除此而外on top of this 14. 引发空气污染contribute to air pollution15. 努力争取可代替能源的使用push for the use of alternative energy sources 16. 太阳能solar energy 17. 采取尝试性的步骤take tentative steps18. 意识到be conscious of 19. 变得愈加受欢迎become increasingly popular 20. 传统的商业conventional / traditional businessesM10 U2(Reading - Grammar)1. 在旅途中,在迁徙中on the move2. 讨论人口趋向look at some population trends3. 朝南head south4. 占18% account for 18%5. 给出各种理由give a variety of reasons6. 有道理,讲得通make sense7. 迎合某人cater to sb 8. 作些改进make some adaptations9. 亲骨肉,亲人one’s (own) flesh and blood 10. 寻求刺激seek excitement11. 大学毕业graduate from university 12. 依靠补贴be dependent on allowance13. 主办play host / hostess to sth. 14. 律师事务所law firm15. 做些调整make some adjustments(Task - Project)1. 用…换…exchange living abroad for a new life in China2. 利用take advantage of3. 从…中受益benefit from4. 政府的优惠政策the government’s preferential policies5. 按照合同做某事be contracted to do sth6. 一完成学业upon completing one’s education7. 言传,口口相传by word of mouth8. 有做某事的倾向have a tendency to do sth.9. 利用国外获得的经验和技能make use of the experience and skills gained abroad10. 在….方面有共同点have something in common11. 抵制做某事resist doing sth 12 服从任何政府submit to any government 13. 徒劳做某事try in vain to do sth. 14. 拐弯抹角地in a roundabout way 15.一系列的国家a chain of countries 16. 衣衫褴褛的流浪汉travelers in rags 17. 算命fortune telling18. 给某人赢得…名声earn sb a reputation as19. 染上非法恶习take to illegal behaviors 20. 将…铲除wipe sth out21. 大量被杀be killed in large numbers 22. 生活在恐惧中live in terror23. 怀疑某人做某事suspect sb. of (doing ) sth.24. 弥补过去的偏见compensate for past prejudiceM10 U3 READING-GRAMMAR1. 死于艾滋病die of Aids2. …是不治之症There’s no cure for…3. 以惊人的速度在全世界传播spread across the world at a frightening rate4. 占75% account for 75%5. 拿某人的健康冒险risk one’s health6. 对…熟悉be familiar with7. 同意这个观点subscribe to the view that…8. 根据估计according to the estimates9. 除了政府的努力apart from government efforts10. 投入全身心做某事devote one’s body and soul to (doing) sthput one’s body and soul into (doing) sth11. 使全世界注意… bring international attention to sth12. 此外,in addition13. 参与,参加be involved in14 据估计It’s estimated that…15. 忍住哭泣choke back sobsTask- Project1. 处于很大的压力下be under a lot of pressure2. 反叛家庭rebel against one’s families3. 非法吸毒take illegal drugs4. 身体上或心理上令人上瘾的addictive physically or psychologically5. 在有些情况下in some cases6. 戒烟难have trouble quitting smoking7. 被称之为be referred to as…8. 慢慢上瘾slide into addiction9. 如果大量饮用if consumed in large quantities10. 范围从…到…(不等)range from … to …11. 人生的污点(remove)a stain on one’s life12. 倒转人生rewind one’s lives13. 从头再来start over again14. 首先in the first place15. 拒绝毒品say no to drugsM10 U4(Reading - Grammar)1. 进行网络犯罪commit crime online2. 挣钱且没有被捕的风险make money with little risk of being caught3. 一个相对较新的词条a relatively new term4. 把…分为四类classify sth into four categories5. 侵犯知识产权违反产权法break intellectual property and copyright laws6. 确认并打击网络犯罪identify and combat cybercrime7. 成为邮件诈骗的目标be the targets of e-mail fraud8. 一个于2002年进行的调查a survey conducted in 20029. 在上一年in the previous year10. 采取步骤做某事take steps to do sth.11. 毫无疑问no doubt12. 提供严密的安全provide tight security13. 访问不适合网站view unsuitable websites14. 任何被发现泄露相关信息的人any employee found leaking information regarding this15. 怀疑某人做某事suspect sb of doingTask - Project1. 为我的行为道歉apologize for my behavior2. 使灯亮着leave my lamp on3. 用光钱run out of money4. 一个蹩脚的借口a lame excuse5. 被学校退学get a suspension from school6. 养成坏习惯get into a bad habit7. 知识产权intellectual property8. 把…定义为…define sth as…9. 应用于apply to10. 应该被付钱deserve to be paid11.开发新产品develop a new product12. 处于法律困境be in legal straits13. 生产假冒伪劣产品produce fake of pirated goods14. 使国际贸易平稳发展smooth the progress of international trade15. 面临be faced with16. 给…带来挑战pose a challenge to sth17. 耗尽…的生命suck the life out of sth18. 为了深入防盗版战争to help further the fight against piracy19. 因为…将某人告上法庭take sb to court for…。
NTN品牌 UCP轴承座
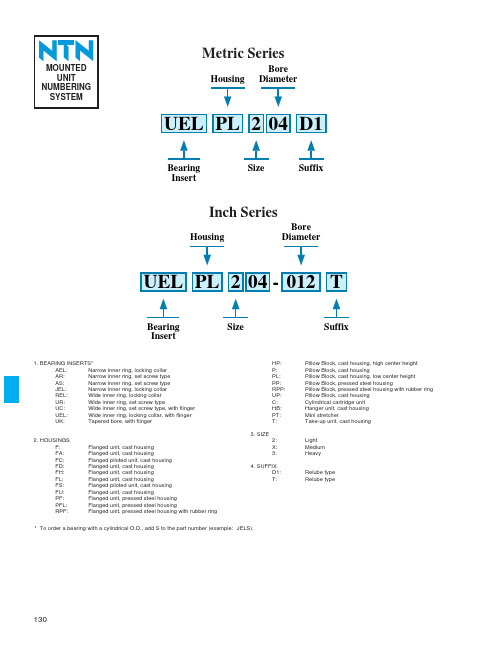
1301. BEARING INSERTS*AEL:Narrow inner ring, locking collar AR:Narrow inner ring, set screw type AS:Narrow inner ring, set screw type JEL:Narrow inner ring, locking collar REL:Wide inner ring, locking collar UR:Wide inner ring, set screw type UC:Wide inner ring, set screw type, with flinger UEL:Wide inner ring, locking collar, with flinger UK:Tapered bore, with flinger2. HOUSINGS F:Flanged unit, cast housing FA:Flanged unit, cast housingFC:Flanged piloted unit, cast housing FD:Flanged unit, cast housing FH:Flanged unit, cast housing FL:Flanged unit, cast housingFS:Flanged piloted unit, cast housing FU:Flanged unit, cast housingPF:Flanged unit, pressed steel housing PFL:Flanged unit, pressed steel housingRPF:Flanged unit, pressed steel housing with rubber ringHP:Pillow Block, cast housing, high center height P:Pillow Block, cast housingPL:Pillow Block, cast housing, low center height PP:Pillow Block, pressed steel housingRPP:Pillow Block, pressed steel housing with rubber ring UP:Pillow Block, cast housing C:Cylindrical cartridge unit HB:Hanger unit, cast housing PT:Mini stretcherT:Take-up unit, cast housing3. SIZE2:Light X:Medium 3:Heavy 4. SUFFIXD1:Relube type T:Relube typeBearingInsertSizeHousingBoreDiameterSuffixBearingInsertSizeHousingBoreDiameter-Suffix* To order a bearing with a cylindrical O.D., add S to the part number (example:JELS).Inch SeriesMetric Series131Units:MillimetersINCHESAxial load should be less than 1/3 of radial load.*Unit with notched set screw as standard.Units:MillimetersINCHESAxial load should be less than 1/3 of radial load.132133Units:MillimetersINCHES134Units:MillimetersINCHES*Unit with notched set screw as standard.Continued next page …135Units:MillimetersINCHES*Unit with notched set screw as standard.Units:MillimetersINCHESContinued next page …13613713845172015853815M14UC305D14,7502,46025⁄3221⁄3225⁄3219⁄323 11⁄321.496.5911⁄2UC305-014D1UC305-015D1UC305-100D150172018954317M14UC306D16,0003,40031⁄3221⁄3225⁄3223⁄32 3 3⁄4 1.693.6691⁄2UC306-102D1UC306-102D1561725201064819M14UC307D17,5004,3007⁄3221⁄3231⁄3225⁄324 3⁄161.890.7481⁄2UC307-104D1UC307-105D1UC307-106D1UC307-107D1601727221165219M14UC308D19,1505,4003⁄821⁄32 1 1⁄167⁄8 4 9⁄16 2.047.7481⁄2UC308-108D1672030241295722M16UC309D111,9007,2005⁄825⁄321 3⁄1615⁄165 3⁄322.244.8665⁄8UC309-110D1752035271436122M16Nominal Dimensionsb s 1s 2g w Bi n Bolt Bearing SizeNumber PILLOW BLOCKS - CAST HOUSINGBasic Load Ratings (lbs)Dynamic Static C C139Units:MillimetersINCHESUnits:MillimetersINCHES140141Units:MillimetersINCHES* Unit with notched set screw as standard.Units:MillimetersINCHES142143Units:MillimetersINCHESUnits:MillimetersINCHES144145Units:MillimetersINCHES146147HOW TO ORDERExample: When you order one SAF22520, you will receive a package containing one SAF520 Pillow Block Housing, one No. 22220BKD1 Bearing and one SNW20Adapter. All units are supplied with two Triple Seal Rings and a Stabilizing Ring. If you specify SAF22520M3, the required end cover will be included. Always specify shaft size. The same example applies when you order SAF22620.A pillow block housing number includes one housing and two triple seal rings auto-matically. Suffix G on a pillow block housing number means one stabilizing ring is also included.NOTE: For cast steel pillow blocks in 22500(22200) Series (SAFS), see pages 150and 151.148149HOW TO ORDERExample: When you order one SAF22220, you will receive a package containing one SAF220Pillow Block Housing, one No. 22220BD1 Bearing, one No. AN20A Locknut and one No. W20Lockwasher. All units are supplied with two Triple Seal Rings and a Stabilizing Ring. If you specify SAF22220M3, the required end cover will be included. Always specify shaft size. The same example applies when you order SAF22320.A pillow block housing number includes one housing and two triple seal rings automatically.Suffix G on a pillow block housing number means one stabilizing ring is also included.SAFS 225151HOW TO ORDERExample No. 1: When you order one SAFS22520, you will receive a package containing one SAFS520 Pillow Block Housing, one No. 22220BKD1 Bearing and one SNW20 Adapter. Example No. 2: When you order one SAFS22220, you will receive a package containing one SAFS220 Pillow Block Housing, one No. 22220BD1 Bearing, one No. AN20A Locknut and one No. W20 Lockwasher.For both of the above examples:All units are supplied with two Triple Seal Rings and a Stabilizing Ring. If you specify SAFS22520M3, the required end cover will be included. Always specify shaft size.A pillow block housing number includes one housing and two triple seal rings automatically.Suffix G on a pillow block housing number means one stabilizing ring is also included.SAFS 222152ASPP2 SERIES.4Continued next page …153Axial load should be less than 1/3 of radial load.*Unit with notched set screw as standard.154Units:MillimetersINCHESAxial load should be less than 1/3 of radial load.155Units:MillimetersINCHES156Units:MillimetersINCHESAxial load should be less than 1/3 of radial load.157Units:MillimetersINCHESAxial load should be less than 1/3 of radial load.*Unit with notched set screw as standard.5ASPF208 has four bolt holes.158Units:MillimetersINCHESAxial load should be less than 1/3 of radial load. *Unit with notched set screw as standard.5AELPF208 has four bolt holes.159Units:MillimetersINCHESAxial load should be less than 1/3 of radial load.5JELPF208 has four bolt holes.16016112UCFL201D11139011126033.331⁄2UCFL201-008T 4 7⁄16 3 17⁄327⁄1625⁄64 2 3⁄8 1 5⁄16 1.22015UCFL202D11139011126033.331⁄16UCFL202-009T 4 7⁄16 3 17⁄327⁄1625⁄642 3⁄8 1 5⁄16 1.220⁄8UCFL202-010T 17UCFL203D11139011126033.33111⁄16UCFL203-011T 4 7⁄16 3 17⁄327⁄1625⁄64 2 3⁄8 1 5⁄16 1.22020UCFL204D11139011126033.331⁄4UCFL204-012T 4 7⁄16 3 17⁄327⁄1625⁄64 2 3⁄8 1 5⁄16 1.22025UCFL205D11309913166835.73413⁄16UCFL205-013T 5 1⁄83 29⁄321⁄215⁄322 11⁄161 13⁄321.339⁄8UCFL205-014T 15⁄16UCFL205-015T 1UCFL205-100T 30UCFL206D114811713168040.238.11 1⁄16UCFL206-101T 5 13⁄16 4 19⁄321⁄229⁄643 5⁄32 1 37⁄64 1.500169044.442.933⁄643 17⁄32 1 3⁄4 1.6891610051.249.233⁄ 3 15⁄ 2 1⁄ 1.937Nominal Dimensionsae gsb z Bi Shaft Complete Dia.Flanged Unit NumberFLANGED UNITS - CAST HOUSING (TWO BOLT)16216325UCFL305D11501131319803938⁄8UCFL305-014T 5 29⁄324 7⁄161⁄23⁄43 5⁄321 17⁄321.49615⁄16UCFL305-015T 1UCFL305-100T 30UCFL306D118013415239044431 1⁄8UCFL306-102T 7 3⁄32 5 9⁄3219⁄3229⁄32 3 17⁄32 1 47⁄64 1.6931 3⁄16UCFL306-103T 35UCFL307D1185141162310049481 1⁄4UCFL307-104T 7 9⁄325 9⁄165⁄81 29⁄323 15⁄161 59⁄641.8901 5⁄16UCFL307-105T 1 3⁄8UCFL307-106T 1 7⁄16UCFL307-107T 40UCFL308D1200158172311256521 1⁄2UCFL308-108T 7 7⁄8 6 7⁄3221⁄3229⁄32 4 13⁄32 2 13⁄64 2.04745UCFL309D1230177182512560571 5⁄UCFL309-110T 9 1⁄ 6 31⁄23⁄ 1 63⁄644 29⁄322 23⁄642.24425140676163⁄64 5 1⁄2 2 41⁄64 2.40225150716663⁄645 29⁄322 51⁄642.598Nominal Dimensionsae g s b z Bi Shaft Complete Dia.Flanged Unit NumberFLANGED UNITS - CAST HOUSING (TWO BOLT)164Housing Bearing Number Number FLANGED UNITS - CAST HOUSING (TWO BOLT)Basic Load Ratings(lbs)Dynamic C FL204D1UEL204D12,890FL204T UEL204-012D1FL205D1UEL205D13,150FL205T UEL205-013D1FL205T UEL205-014D1FL205T UEL205-015D1FL205T UEL205-100D1FL206D1UEL206D14,400FL206T UEL206-101D1FL206T UEL206-102D1FL206T UEL206-103D1FL206T UEL206-104D1FL207D1UEL207D15,750FL207T UEL207-104D1FL207T UEL207-105D1FL207T UEL207-106D1FL207T UEL207-107D1FL207D1UEL208D16,550FL208T UEL208-108D1FL208T UEL208-109D1FL209D1UEL209D17,350FL209T UEL209-110D1FL209T UEL209-111D1FLANGED UNITS - CAST HOUSING (TWO BOLT)Nominal Dimensionss z Bi Di1946.146.842.83⁄4 1 13⁄16 1.843 1.6852350.5505029⁄32 1 63⁄64 1.969 1.9692353.351.65529⁄32 2 3⁄32 2.031 2.1652360.357.163.529⁄32 3 3⁄8 2.248 2.5002563.958.77063⁄64 2 33⁄64 2.311 2.756257066.676.263⁄64 2 3⁄4 2.622 3.0002575.2738363⁄64 2 61⁄64 2.874 3.268165166167*Unit with notched set screw as standard.168169170Units:MillimetersINCHES*Unit with notched set screw as standard.Continued on next page.171Units:MillimetersINCHES*Unit with notched set screw as standard.172Continued on next page.Units:MillimetersINCHES173Units:MillimetersINCHES174Units:MillimetersINCHESContinued on next page.175Units:MillimetersINCHES176Units:MillimetersINCHES177Units:MillimetersINCHES178Units:MillimetersINCHESASPF2 SERIES.4。
模块11Unit2Gettingajob课文处理及语言点(译林牛津版高三英语选修十教案教学设计)
模块11 Unit 2 Getting a job 课文处理及语言点(译林牛津版高三英语选修十教案教学设计)For teachersUnit 2 Getting a jobTaskI. Language focus1. in response to 对……做出反应, 响应In response to complaints, the company looked into the case.She opened the door in response to the knock.I’m writing in response to the question you raised in your letter.联想: in reply/answer to2. be responsible for 为...负责, 形成...的原因公共汽车司机应对乘客的安全负责。
The bus driver is response for the passengers safety.(=in charger of/look after)Police believe that the same man is responsible for three other murders in the area.(=it is their fault or they can be blamed)3. best-selling program最畅销的程序best-seller n. 畅销书;畅销货4. compete with/against sb. for sth.I had to compete against 19 other people for the job.compete inThe company must be able to compete in the international marketplace.They found themselves competing with foreign companies for a share of the market.5. on one’s own独自;靠自己I've been living on my own for four years now. =(alone)You can't expect him to do it all on his own. =without anyone's help6. have no trouble (in)doinghave trouble/difficulty (in) doing 做某事有困难,有麻烦with sth.have a hard/easy time / problems doing sth.We had no trouble finding the address.We're having a lot of trouble with the new computer system.I had a hard time persuading him to accept the offer.He had problems finding a job .7. look forward to doing分析句子The day we looked forward to came (come) at last.They suggested the professor referred to be made (make) Chairman.8. be available for/toThere is no money available for the project.Not enough data is available to scientists.校长明天能出席毕业典礼吗?Is the president available for the graduation ceremony tomorrow?我们找不到住处过夜。
努沃通 M031TC 开发板用户手册说明书

M-m UARM ® Cortex ®-M32-bit MicrocontrollerNuMaker-M031TC User ManualNuMicro ®M031 SeriesThe information described in this document is the exclusive intellectual property ofNuvoton Technology Corporation and shall not be reproduced without permission from Nuvoton.Nuvoton is providing this document only for reference purposes of NuMicro microcontroller based systemdesign. Nuvoton assumes no responsibility for errors or omissions.All data and specifications are subject to change without notice.For additional information or questions, please contact: Nuvoton Technology Corporation.Table of Contents1Overview (6)1.1NuMaker-M031TC Features (6)2NuMaker-M031TC Overview (8)2.1Front View (8)Rear View (9)2.22.3Arduino UNO Compatible Extension Connectors (10)Pin Assignment for Extension Connectors (12)2.42.5System Configuration (14)2.5.1VIN Power Source (14)2.5.2 5 V Power Sources (14)2.5.3 3.3 V Power Sources (14)2.5.4 1.8V Power Sources (15)2.5.5Power Connectors (15)2.5.6USB Connectors (15)2.5.7Power Switches (15)2.5.8Power Supply Models (16)2.5.9Ammeter Connector (19)2.5.10Extension Connectors (19)2.5.11Push-Buttons (19)2.5.12LEDs (20)2.6Nu-Link2-Me (20)2.7PCB Placement (21)3Quick Start (22)3.1Toolchains Supporting (22)3.2Nuvoton Nu-Link Driver Installation (22)3.3BSP Firmware Download (24)3.4Hardware Setup (24)3.5Find the Example Project (26)3.6Execute the Project under Toolchains (26)3.6.1Keil MDK (26)3.6.2IAR EWARM (30)3.6.3NuEclipse (31)4NuMaker-M031TC Schematics (32)M-m UNu-Link2-Me ........................................................................................... 32 4.1 M031 Platform ......................................................................................... 33 4.2Extension Connector (34)4.35REVISION HISTORY (35)List of FiguresFigure 1-1 NuMaker-M031TC Board (6)Figure 2-1 Front View of NuMaker-M031TC (8)Figure 2-2 Rear View of NuMaker-M031TC (9)Figure 2-3 Arduino UNO Compatible Extension Connectors (10)Figure 2-4 M031TC1AE Extension Connectors (12)Figure 2-5 External Power Supply Sources on Nu-Link2-Me (16)Figure 2-6 External Power Supply Sources on M031 Platform (17)Figure 2-6 Separate the Nu-Link2-Me from NuMaker-M031TC (18)Figure 2-7 Wiring between Ammeter Connector and Ammeter (19)Figure 2-8 Front Placement (21)Figure 2-9 Rear Placement (21)Figure 3-1 Nu-Link USB Driver Installation Setup (22)Figure 3-2 Nu-Link USB Driver Installation (23)Figure 3-3 Open VCOM Function (24)Figure 3-4 ICE USB Connector (24)Figure 3-5 Device Manger (25)Figure 3-6 PuTTY Session Setting (25)Figure 3-7 Template Project Folder Path (26)Figure 3-8 Warning Message of “Device not found” (26)Figure 3-9 Project File Migrate to Version 5 Format (27)Figure 3-10 Debugger Setting in Options Window (27)Figure 3-11 Programming Setting in Options Window (28)Figure 3-12 Compile and Download the Project (28)Figure 3-13 Keil MDK Debug Mode (29)Figure 3-14 Debug Message on Serial Port Terminal Windows (29)Figure 3-15 IAR EWARM Window (30)Figure 3-16 Compile and Download the Project (30)Figure 3-17 IAR EWARM Debug Mode (31)Figure 3-18 Debug Message on Serial Port Terminal Windows (31)Figure 4-1 Nu-Link2-Me Circuit (32)Figure 4-2 M031 Platform Circuit (33)Figure 4-3 Extension Connectors Circuit (34)List of TablesTable 2-1 Arduino UNO Extension Connectors and M031TC1AE Mapping GPIO List (11)Table 2-2 M031TC1AE Full-pin Extension Connectors and GPIO Function List (13)Table 2-3 Vin Power Source (14)Table 2-4 5V Power Sources (14)Table 2-5 3.3 V Power Sources (14)Table 2-6 1.8V Power Sources (15)Table 2-7 Power Connectors (15)Table 2-8 USB Connectors (15)Table 2-9 Power Switches (15)Table 2-10 Supply External Power through Nu-Link2-Me (16)Table 2-11 Supply External Power for M031 platform (18)Table 2-12 Ammeter Connector (19)Table 2-13 Extension Connectors (19)Table 2-14 Push-Buttons (19)Table 2-15 LEDs (20)Table 2-16 VCOM Function of Nu-Link2-Me (20)M-mU1 OVERVIEWThis user manual is aimed to give users a fast introduction to the use of NuMaker-M031TC board.The NuMaker-M031TC consists of two parts, a M031 platform and an on-board Nu-Link2-Me debugger and programmer. The NuMaker-M031TC allows users to quickly develop and easily program and debug application.The NuMaker-M031TC offers M031TC1AE full pins extension connectors, Arduino UNO compatible extension connectors and diversified power supply option. It is an easy-to-develop platform for user to expand the functionality and build the applications. The NuMaker-M031TC also provides an ammeter connector, allows user to monitor the microcontroller’s power consumption during development.The Nu-Link2-Me is a debugger and programmer that supports on-line programming and debugging through SWD interface. The on-board 16 Mbit SPI Flash allows it able to off-line programming the target microcontroller. Nu-Link2-Me provides virtual COM port (VCOM) function to print out messages on PC. Nu-Link2-Me can be separated from NuMaker-M031TC, allowing user to use as a mass production programming tool.Figure 1-1 NuMaker-M031TC Board1.1NuMaker-M031TC Features●NuMicro® M031TC1AE used as main microcontroller with function downward compatiblewith:◆M031TC1AE◆M031EC1AE◆M031FC1AE●M031TC1AE full pins extension connectors●Arduino UNO compatible extension connectors●Ammeter connector for measuring the microcontroller’s power consumption●Fixable board power supply:◆External V DD power connector◆Arduino UNO compatible extension connector Vin◆USB power connector on M031 platform◆ICE USB connector on Nu-Link2-Me●On-board Nu-Link2-Me debugger and programmer:◆Debug through SWD interface◆On-line/off-line programming◆Virtual COM port functionM-mU2NUMAKER-M031TC OVERVIEWFront View2.1ICE USB Connector VCOM SwitchReset Button ICE Status LEDOff-line Program ButtonUSB Power Connector Power LED PB14 LEDV DD SwitchTarget Chip: M031TC1AETarget Chip Extension Connector Arduino UNO Compatible Extension ConnectorExternal V DD ConnectorNu-Link2-MeAmmeter ICE Chip: M48SSIDAE External V SS ConnectorM031 PlatformFigure 2-1 Front View of NuMaker-M031TCFigure 2-1 shows the main components and connectors from the front side of NuMaker-M031TC. The following lists components and connectors from the front view:● Target Chip: M031TC1AE(U1) ● USB Power Connector(J2)● Arduino UNO Compatible Extension Connectors (NU1, NU2, NU3, NU4) ● M031 Extension Connectors (JP3, JP4, JP5 and JP6) ●External V DD Power Connector(JP1) ● External V SS Power Connector(JP2) ● VDD Switch(SW2)● Ammeter Connector(AMMETER) ● Reset Button(SW1)● Power LED and PB14 LED(LEDG1 and LEDR1) ●Nu-Link2-Me ◆ VCOM Switch◆ ICE Chip: M48SSIDAE(ICEU2) ◆ ICE USB Connector(ICEJ3)◆ ICE Status LED(ICES0,ICES1, ICES2, ICES3) ◆Off-line Program Button(ICESW1)2.2Rear ViewFigure 2-2 shows the main components and connectors from the rear side of NuMaker-M031TC.The following lists components and connectors from the rear view:●Nu-Link2-Me◆MCUVCC Power Switch (ICEJPR1)◆ICEVCC Power Switch (ICEJPR2)ICEVCC Power SwitchMCUVCC Power SwitchFigure 2-2 Rear View of NuMaker-M031TCNUMAKER-M031TC USER MANUAL M-m U2.3Arduino UNO Compatible Extension ConnectorsFigure 2-3 shows the Arduino UNO compatible extension connectors.Figure 2-3 Arduino UNO Compatible Extension ConnectorsNUMAKER-M031TC USER MANUALM-mUTable 2-1 Arduino UNO Extension Connectors and M031TC1AE Mapping GPIO ListPin Assignment for Extension Connectors2.4The NuMaker-M031TC provides the M031TC1AE target chip onboard and full pins extension connectors (JP3, JP4, JP5 and JP6). The Figure 2-4 shows the M031TC1AE extension connectors.JP3Pin1 ~ Pin8JP6Pin25 ~ Pin32JP5Pin9 ~ Pin18JP4Pin19 ~ Pin24Figure 2-4 M031TC1AE Extension ConnectorsNUMAKER-M031TC USER MANUAL M-m U2.5System Configuration2.5.1 VIN Power SourceTable 2-3 presents the Vin power source.Table 2-3 Vin Power Source 2.5.2 5 V Power SourcesTable 2-4 presents the 5 V power sources.Table 2-4 5V Power Sources 2.5.3 3.3 V Power SourcesTable 2-5 presents the 3.3 V power sources.Table 2-5 3.3 V Power SourcesM-mU2.5.4 1.8V Power SourcesTable 2-6 presents the 1.8 V power source.Table 2-6 1.8V Power Sources2.5.5 Power ConnectorsTable 2-7 presents the power connectors.Table 2-7 Power Connectors2.5.6 USB ConnectorsTable 2-8 presents the USB connectors.Table 2-8 USB Connectors2.5.7 Power SwitchesTable 2-9 presents the power switches.Table 2-9 Power Switches2.5.8 Power Supply Models2.5.8.1External Power Supply through Nu-Link2-Me to Target ChipThe external power supply source on Nu-Link2-Me is shown in Figure 2-5.ICE USB Connector (ICEJ3)Nu-Link2-MeFigure 2-5 External Power Supply Sources on Nu-Link2-MeTo use ICEJ3 as external power supply source with Nu-Link2-Me, please follow the below steps:1. Solder the resistor on ICEJPR1 (MCUVCC) depends on the target chip operating voltage.2. Solder the resistor on ICEJPR2 (ICEVCC) depends on the ICE chip operating voltage.3. Switch the SW2 to OFF.4. Connect the external power supply to JP1.Table 2-10 presents all power models when supplies external power through Nu-Link2-Me. The Nu-Link2-Me external power sources are highlighted in yellow.Table 2-10 Supply External Power through Nu-Link2-MeM -m UExternal Power Supply through M031 platform to Target Chip 2.5.8.2The external power supply sources on M031 platform are shown in Figure 2-6.USB Power Connector (J2)NU1 pin8 (Vin)External V DD Connector (JP1)External V SS Connector (JP2)Figure 2-6 External Power Supply Sources on M031 PlatformTo use Vin or J2 as external power supply source, please follow the below steps:1. Switch the SW2 depends on the target chip operating voltage.2. Remove the resistor on ICEJPR1 (MCUVCC).3. Solder the resistor on ICEJPR2 (ICEVCC) depends on the ICE chip operating voltage.4. Connect the external power supply to Vin or J2.To use JP1 as external power supply source, please follow the below steps:1. Switch the SW2 to OFF.2. Remove the resistor on ICEJPR1 (MCUVCC).3. Solder the resistor on ICEJPR2 (ICEVCC) depends on the ICE chip operating voltage.4. Connect ICEJ3 to PC.5. Connect the external power supply to JP1.6.To use Vin or J2 as external power supply source with Nu-Link2-Me separated from NuMaker- M031TC, please follow the below steps:1. Switch the SW2 depends on the target chip operating voltage.2. Separate the Nu-Link2-Me from NuMaker- M031TC.3. Connect the external power supply to Vin or J2.To use JP1 as external power supply source with Nu-Link2-Me separated from NuMaker-M031TC, please follow the below steps:1. Switch the SW2 to OFF.2. Separate the Nu-Link2-Me from NuMaker-M031TC.3. Connect the external power supply to JP1.USB Power Connector (J2)NU1 pin8 (Vin)External V DD Connector (JP1)External V SS Connector (JP2)Separate Nu-Link2-Me""Figure 2-7 Separate the Nu-Link2-Me from NuMaker-M031TCTable 2-11 presents all power models when supplies external power through M031 platform. TheTable 2-11 Supply External Power for M031 platformM -m U2.5.9 Ammeter ConnectorTable 2-12 presents the ammeter connector.Table 2-12 Ammeter ConnectorUSB Power Connector (J2)NU1 pin8 (Vin)External V DD Connector (JP1)External V SS Connector (JP2)Separate Nu-Link2-Me""2.5.10 Extension ConnectorsTable 2-13 presents the extension connectors.Table 2-13 Extension Connectors2.5.11 Push-ButtonsTable 2-14 presents the push-buttons.Table 2-14 Push-Buttons2.5.12 LEDsTable 2-15 presents the LEDs.Table 2-15 LEDs2.6Nu-Link2-MeThe Nu-Link2-Me is a debugger and programmer that supports on-line programming and debugging through SWD interface. The on-board 16 Mbit SPI Flash allows it to off-line program the target microcontroller. Additionally, the Nu-Link2-Me provides virtual COM port (VCOM) function to print out messages on PC. Table 2-16 presents how to set the VCOM function by ICESW2.Table 2-16 VCOM Function of Nu-Link2-MeNUMAKER-M031TC USER MANUALM-mUPCB Placement2.7Figure 2-9 and Figure 2-10 show the front and rear placement of NuMaker-M031TC.Figure 2-9 Front PlacementFigure 2-10 Rear Placement3 QUICK START3.1Toolchains SupportingInstall the preferred toolchain. Please make sure at least one of the toolchains has been installed.●KEIL MDK Nuvoton edition M0/M23●IAR EWARM●NuEclipse (GCC)(Windows)●NuEclipse (GCC)(Linux)3.2Nuvoton Nu-Link Driver InstallationDownload and install the latest Nuvoton Nu-Link Driver.●Download and install Nu-Link_Keil_Driver when using Keil MDK.●Download and install Nu-Link_IAR_Driver when using IAR EWARM.●Skip this step when using NuEclipse.Please install the Nu-Link USB Driver as well at the end of the installation. The installation is presented in Figure 3-1 and Figure 3-2.Figure 3-1 Nu-Link USB Driver Installation SetupNUMAKER-M031TC USER MANUAL M-m U Figure 3-2 Nu-Link USB Driver Installation3.3BSP Firmware DownloadDownload and unzip the Board Support Package (BSP).Hardware Setup3.41. Open the virtual COM (VCOM) function by changing Nu-Link2-Me VCOM Switch No. 1 and 2 toON.Figure 3-3 Open VCOM Function2. Connect the ICE USB connector shown in Figure 3-4 to the PC USB port through USB cable.Figure 3-4 ICE USB Connector3. Find the “Nuvoton Virtual COM Port” on the Device Manger as Figure 3-5.NUMAKER-M031TC USER MANUALM-m UFigure 3-5 Device Manger4. Open a serial port terminal, PuTTY for example, to print out debug message. Set the speed to115200. Figure 3-6 presents the PuTTY session setting.Figure 3-6 PuTTY Session SettingFind the Example Project3.5Use the “Template” project as an example. The project can be found under the BSP folder as shown in Figure 3-7.Figure 3-7 Template Project Folder Path3.6Execute the Project under ToolchainsOpen and execute the project under the toolchain. The section 3.6.1, 3.6.2, and 3.6.3 describe the steps of executing project in Keil MDK, IAR EWARM and NuEclipse, respectively.3.6.1 Keil MDKThis section provides steps to beginners on how to run a project by using Keil MDK.1. Double click the “Template.uvproj” to open the project.Note: If Figure 3-8 warning message jumps out, please migrate to version 5 formats as shown in Figure 3-9. The “.uvproj” filename extension will change to “.uvprojx”.Figure 3-8 Warning Message of “Device not found”NUMAKER-M031TC USER MANUALM-m U123Figure 3-9 Project File Migrate to Version 5 Format2. Make sure the debugger is “Nuvoton Nu-Link Debugger ” as shown in Figure 3-10 and Figure 3-11.Note: If the dropdown menu in Figure 3-10 does not contain “Nuvoton Nu-Link Debugger ” item, please rework section 3.2.21Figure 3-10 Debugger Setting in Options Window345Figure 3-11 Programming Setting in Options Window3. Rebuild all target files. After successfully compile the project, download code to the flash memory.Click “Start/Stop Debug Section” button can enter debug mode.13 24 1. Rebuild3. Download4. Start/Stop Debug2. Successfully compileFigure 3-12 Compile and Download the Project4. Figure 3-13 shows the debug mode under Keil MDK. Click “Run” and the debug message will beprinted out as shown in Figure 3-14. User can debug the project under debug mode by checkingNUMAKER-M031TC USER MANUALM-mUsource code, assembly language, peripherals ’ registers, and setting breakpoint, step run, value monitor, etc.2. Stop 3 1 21. Run3. ResetFigure 3-13 Keil MDK Debug ModeFigure 3-14 Debug Message on Serial Port Terminal Windows3.6.2 IAR EWARMThis section provides steps to beginners on how to run a project by using IAR EWARM.1. Double click the “Template.eww” to open the project.2. Make sure the toolbar contain “Nu-Link” item as shown in Figure 3-15.Note: If the toolbar does not contain “Nu-Link” item, please rework section 3.2.Figure 3-15 IAR EWARM Window3. Make target file as presented in Figure 3-16. After successfully compile the project, downloadcode to the flash memory and enter debug mode.1321. Make3. Download and Debug2. Successfully compileFigure 3-16 Compile and Download the ProjectNUMAKER-M031TC USER MANUALM-mU4. Figure 3-17 shows the debug mode under IAR EWARN. Click “Go ” and the debug message willbe printed out as shown in Figure 3-18. User can debug the project under debug mode by checking source code, assembly language, peripherals ’ registers, and setting breakpoint, step run, value monitor, etc.1 2 31. Go 3. Reset2. BreakFigure 3-17 IAR EWARM Debug ModeFigure 3-18 Debug Message on Serial Port Terminal Windows3.6.3 NuEclipseFor more information about how to use NuEclipse, please refer to the NuEclipse User Manual.4 NUMAKER-M031TC SCHEMATICS4.1Nu-Link2-MeFigure 4-1 shows the Nu-Link2-Me circuit. The Nu-Link2-Me is a debugger and programmer that supports on-line programming and debugging through SWD interface.Nu-Link2-MeFigure 4-1 Nu-Link2-Me Circuit4.2M031 PlatformFigure 4-2 shows the M031 platform circuit.NUMAKER-M031TC USER MANUAL M-m UFigure 4-2 M031 Platform Circuit4.3Extension ConnectorFigure 4-3 shows extension connectors of NuMaker-M031TC.Figure 4-3 Extension Connectors Circuit5 REVISION HISTORY2019.02.20 1.00 1. Initially issued.M-mUImportant NoticeNuvoton Products are neither intended nor warranted for usage in systems or equipment, any malfunction or failure of which may cause loss of human life, bodily injury or severe property damage. Such applications are deemed, “Insecure Usage”.Insecure usage includes, but is not limited to: equipment for surgical implementation, atomic energy control instruments, airplane or spaceship instruments, the control or operation of dynamic, brake or safety systems designed for vehicular use, traffic signal instruments, all types of safety devices, and other applications intended to support or sustain life.All Insecure Usage shall be made at customer’s risk, and in the event that third parties lay claims to Nuvoton as a result of customer’s Insecure Usage, custome r shall indemnify the damages and liabilities thus incurred by Nuvoton.。
展锐虎贲T310详解:首次引入大核及DynamIQ架构芯智讯

展锐虎贲T310详解:首次引入大核及DynamIQ架构芯智讯继今年2月“春藤”品牌下首款5G基带芯片春藤510发布之后,4月9日,全球知名移动通信及物联网核心芯片厂商紫光展锐正式发布了“虎贲”品牌下首款产品——虎贲T310,这是全球首款基于Arm DynamIQ架构、面向智能手机的四核LTE芯片平台。
官方称其可实现优异的运算性能及低功耗管理,为全球主流市场用户提供旗舰级的应用体验。
众所周知,目前在中高端智能手机主控芯片市场,八核已经成为了主流,不过在低端智能手机市场,四核仍是主流。
那么展锐新推出的四核LTE平台虎贲T310主要是针对那个价位段的市场?Arm DynamIQ架构能为其性能带来多大的提升?除了内核架构上的变化之外,虎贲T310还有哪些提亮点?4月9日下午,芯智讯采访了展锐市场副总裁周晨,对于以上问题做了深度的解答。
▲展锐市场副总裁周晨首发Arm DynamIQ架构四核自2011年ARM big.LITTLE技术推出以来,它已经成为了目前运用非常广泛的多核架构技术。
big.LITTLE技术是将多个大核组成一个计算集群、多个小核组成另一个计算集群,然后进行协作运行。
但是,随着用户对于内核性能及功耗的要求越来越高,对于内核的管理需求也向着更为精细化的方向发展。
2017年3月,Arm推出了全新的DynamIQ技术,其允许在单一计算集群上进行大小核配置,可以出现比如1+3、1+7、3+5等诸多类型(目前最多可以支持配置8核),将内核的可配置性提升到了一个新的台阶。
同时,DynamIQ big.LITTLE还可以对每一个处理器进行独立的频率控制以及开、关、休眠状态的控制,可以实现高效的、无缝的在不同任务间切换最合适的处理器内核。
而此次展锐推出的虎贲T310则是全球首款基于DynamIQ技术的四核LTE平台,其采用了1颗2.0 GHz Cortex-A75大核和3颗1.8 GHz Cortex-A55小核组合。
NPN小信号达林顿晶体管说明书

© Semiconductor Components Industries, LLC, 2010 September, 2010 − Rev. 61Publication Order Number:BSP52T1/DBSP52T1G, BSP52T3GNPN Small-SignalDarlington TransistorThis NPN small signal Darlington transistor is designed for use in switching applications, such as print hammer, relay, solenoid and lamp drivers. The device is housed in the SOT-223 package, which is designed for medium power surface mount applications.Features•The SOT-223 Package can be soldered using wave or reflow. The formed leads absorb thermal stress during soldering, eliminating the possibility of damage to the die•Available in 12 mm Tape and ReelUse BSP52T1 to Order the 7 Inch/1000 Unit Reel•PNP Complement is BSP62T1•These Devices are Pb−Free, Halogen Free/BFR Free and are RoHS CompliantMAXIMUM RATINGS (T C = 25°C unless otherwise noted)Rating Symbol Max Unit Collector-Emitter Voltage V CES80Vdc Collector-Base Voltage V CBO90Vdc Emitter-Base Voltage V EBO 5.0Vdc Collector Current I C 1.0AdcTotal Power Dissipation (Note 1) @ T A = 25°CDerate above 25°C P D0.86.4WmW/°CTotal Power Dissipation (Note 2) @ T A = 25°CDerate above 25°C P D1.2510WmW/°COperating and StorageTemperature RangeT J, T stg−65 to 150°C THERMAL CHARACTERISTICSCharacteristic Symbol Value Unit Thermal Resistance (Note 1)Junction-to-AmbientR q JA156°C/WThermal Resistance (Note 2) Junction-to-Ambient R qJA100°C/WMaximum Temperature for SolderingPurposesTime in Solder Bath T L26010°CSecStresses exceeding Maximum Ratings may damage the device. Maximum Ratings are stress ratings only. Functional operation above the Recommended Operating Conditions is not implied. Extended exposure to stresses above the Recommended Operating Conditions may affect device reliability.1.Device mounted on a FR-4 glass epoxy printed circuit board using minimumrecommended footprint.2.Device mounted on a FR-4 glass epoxy printed circuit board using 1 cm2 pad.Device Package Shipping†ORDERING INFORMATIONMARKING DIAGRAMSOT−223CASE 318ESTYLE 11AYWAS3GGA= Assembly LocationY= YearW= Work WeekAS3= Specific Device CodeG= Pb−Free Package(Note: Microdot may be in either location)MEDIUM POWERNPN SILICONSURFACE MOUNT DARLINGTON TRANSISTORBSP52T1G SOT−223(Pb−Free)1000/Tape & Reel†For information on tape and reel specifications, including part orientation and tape sizes, please refer to our T ape and Reel Packaging Specifications Brochure, BRD8011/D.BSP52T3G SOT−223(Pb−Free)4000/Tape & ReelELECTRICAL CHARACTERISTICS (T A = 25°C unless otherwise noted)Characteristics Symbol Min Max Unit OFF CHARACTERISTICSCollector-Base Breakdown Voltage (I C = 100 m Adc, I E = 0)V(BR)CBO90−VdcEmitter-Base Breakdown Voltage (I E = 10 m Adc, I C = 0)V(BR)EBO5.0−VdcCollector-Emitter Cutoff Current (V CE = 80 Vdc, V BE = 0)I CES−10m AdcEmitter-Base Cutoff Current (V EB = 4.0 Vdc, I C = 0)I EBO−10m AdcON CHARACTERISTICS (Note 3)DC Current Gain(I C = 150 mAdc, V CE = 10 Vdc) (I C = 500 mAdc, V CE = 10 Vdc)h FE10002000−−−Collector-Emitter Saturation Voltage (I C = 500 mAdc, I B = 0.5 mAdc)V CE(sat)− 1.3VdcBase-Emitter Saturation Voltage (I C = 500 mAdc, I B = 0.5 mAdc)V BE(sat)− 1.9Vdc3.Pulse Test: Pulse Width ≤ 300 m s, Duty Cycle ≤ 2.0%2PACKAGE DIMENSIONSSOT −223 (TO −261)CASE 318E −04ISSUE NSTYLE 1:PIN 1.BASE2.COLLECTOR3.EMITTER4.COLLECTORNOTES: 1.DIMENSIONING AND TOLERANCING PER ASME Y14.5M,1994. 2.CONTROLLING DIMENSION: INCH.SOLDERING FOOTPRINT*DIM A MIN NOM MAX MIN MILLIMETERS 1.50 1.63 1.750.060INCHESA10.020.060.100.001b 0.600.750.890.024b1 2.90 3.06 3.200.115c 0.240.290.350.009D 6.30 6.50 6.700.249E 3.30 3.50 3.700.130e 2.20 2.30 2.400.0870.850.94 1.050.0330.0640.0680.0020.0040.0300.0350.1210.1260.0120.0140.2560.2630.1380.1450.0910.0940.0370.041NOM MAX L1 1.50 1.75 2.000.0606.707.007.300.2640.0690.0780.2760.287H E −−e10°10°0°10°q L 0.20−−−−−−0.008−−−−−−*For additional information on our Pb −Free strategy and solderingdetails, please download the ON Semiconductor Soldering and Mounting Techniques Reference Manual, SOLDERRM/D.ON Semiconductor and are registered trademarks of Semiconductor Components Industries, LLC (SCILLC). SCILLC reserves the right to make changes without further notice to any products herein. SCILLC makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does SCILLC assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages.“Typical” parameters which may be provided in SCILLC data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. SCILLC does not convey any license under its patent rights nor the rights of others. SCILLC products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the SCILLC product could create a situation where personal injury or death may occur.Should Buyer purchase or use SCILLC products for any such unintended or unauthorized application, Buyer shall indemnify and hold SCILLC and its officers, employees, subsidiaries,affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that SCILLC was negligent regarding the design or manufacture of the part. SCILLC is an Equal Opportunity/Affirmative Action Employer. This literature is subject to all applicable copyright laws and is not for resale in any manner.PUBLICATION ORDERING INFORMATION。
博士瑞士公司电机电磁涡轮铰板EMC R310A产品介绍说明书
The Drive & Control Company3Bosch Rexroth Corporation Electromechanical Cylinder EMC R310A 3306 (2008.01)Electromechanical Cylinder EMCProduct Overview4Technical Data and Dimensions EMC6Dimensions EMC with Motor Mount and Motor 8Dimensions EMC with belt side drive 10Motors 12AC servo motors MSK 14Servo motors MSM153-phase stepper motors VRDM16Accessories 18Permissible Speeds 20Permissible Drive Torque 22Permissible Axial Force 24Confi guration and Ordering 26Inquiry / Order Form30Machine tools or woodworking machines Adjustable mechanical stop for a sawLoad capacities Max. axial forceF Permissible drive torque atdrive journal MSpeedv1)StrokeHcations (minimum stroke 100 mm)7Bosch Rexroth Corporation SWL K = V B +HL EMCHR TB GØBØK K ØM MV FDV DV GK WV FBL Z V AD ZØB AE=E K VL V A MW HK A W A=T G==T G Electromechanical Cylinder EMC R310A 3306 (2008.01)EMC sizeBall screw sizeDimensions (mm)M M R T SW T G V A V B V FB V FD V G V D W A W H f8± 0.1± 0.13212x5R x3-418M 61032.5±0.354132303016562612x10R x2-218M 61032.5±0.35413630301656264016x5R x3-420M 61038.0±0.354134333020563016x10R x3-320M 61038.0±0.354143333020563016x16R x3-320M 61038.0±0.35415933302056305020x5R x3-425M 81646.5±0.454142383325583720x20R x3.5-325M 81646.5±0.45418038332558376325x5R x3-430M 81656.5±0.554148403325583725x10R x3-430M 81656.5±0.554167403325583725x25R x3.5-330M 81656.5±0.55419940332558378032x5R x3.5-438M 102272.0±0.6041584435335104632x10R x3.969-538M 102272.0±0.6041874435335104632x20R x3.969-338M 102272.0±0.6041954435335104632x32R x3.969-338M 102272.0±0.6042304435335104610040x5R x3.5-550M 102289.0±0.6041664835385105140x10R x6-450M 102289.0±0.6041854835385105140x20R x6-350M 102289.0±0.6042034835385105140x40R x6-350M 102289.0±0.60425848353851051EMC size Ball screw sizeDimensions (mm)A M B B A B G D Z E K K K A K V L VL Z K W –0.1e11e11h7± 0.1E113212x5R x3-422303016547M 10x1.25 6.6517617612x10R x2-222303016547M 10x1.25 6.651761764016x5R x3-424353516853M 12x1.25 6.6519621716x10R x3-324353516853M 12x1.25 6.6519621716x16R x3-324353516853M 12x1.25 6.651962175020x5R x3-4324040161065M 16x1.511.1524826820x20R x3.5-3324040161065M 16x1.511.152482686325x5R x3-4324545161575M 16x1.511.1524831825x10R x3-4324545161575M 16x1.511.1524831825x25R x3.5-3324545161575M 16x1.511.152483188032x5R x3.5-4405555161895M 20x1.515.153015–0.05/–0.2421032x10R x3.969-5405555161895M 20x1.515.153015–0.05/–0.2421032x20R x3.969-3405555161895M 20x1.515.153015–0.05/–0.2421032x32R x3.969-3405555161895M 20x1.515.153015–0.05/–0.2421010040x5R x3.5-54065651625115M 20x1.515.153015–0.05/–0.2531040x10R x6-44065651625115M 20x1.515.153015–0.05/–0.2531040x20R x6-34065651625115M 20x1.515.153015–0.05/–0.2531040x40R x6-34065651625115M 20x1.515.153015–0.05/–0.25310S hown in a retracted positionL9Bosch Rexroth Corporation S 1-L 1R T -L TL MFL E 1DL EL K = V B + HL EMCHR TB GV FD V DElectromechanical Cylinder EMC R310A 3306 (2008.01)L MF 0 = L E MC + L MF + L EEMC sizeMotorDimensions (mm)B GD L MF LE L E1L TL 1R T S 1V D V FD without brake with brake32MSM020B 1642.045109.0140.57.02512M 6M 3530MSM030B 1660.055111.0144.07.02518M 6M 4530MSK030C 1654.055188.0213.07.02518M 6M 4530VRDM368 1657.245116.0157.0 5.02518M 6M 453040MSM020B 1642.045109.0145.57.02512M 6M 3530MSM030B 1660.061111.0144.07.02518M 6M 4530MSK030C 1654.061188.0213.07.02518M 6M 4530VRDM3681657.245116.0157.0 5.02518M 6M 453050MSM030C 1660.073138.5171.57.02518M 8M 4533MSK030C 1654.073188.0213.07.02518M 8M 4533MSK040C 1682.073185.5215.08.02522M 8M 6533VRDM3971685.073110.0157.010.02525M 8M 653363MSM040B 1680.073157.5191.58.02522M 8M 5533MSK040C 1682.073185.5215.08.02522M 8M 6533MSK050C 1698.073203.0257.09.02525M 8M 8533VRDM39101685.073140.0186.510.02525M 8M 653380MSK040C 1682.073185.5215.08.02522M 10M 6535MSK050C 1698.095203.0257.09.02525M 10M 8535MSK060C 16116.095226.0282.09.52525M 10M 8535MSK076C 16140.095–292.5–2525M 10M 10535VRDM39101685.073140.0186.510.02525M 10M 6535100MSK060C 16116.0108226.0282.09.52525M 10M 8535MSK076C16140.0108–292.5–2525M 10M 10535S hown in a retracted positionL E1DL EA L RV L K = VB + H L EMC L R V0B RVT GT G A 1A 2H1)R T B GV FD V DEMC sizeMotorDimensions (mm)B GA A 1A 2B RV L EL E1L RV T G R T V D V FD without brake with brake32MSM020B 16152.032.571.864.5109.0140.57.037.032.5M6530MSM030B 16152.032.571.864.5111.0144.07.037.032.5M6530MSK030C 16152.032.571.864.5188.0213.07.037.032.5M6530VRDM36816152.032.571.864.5116.0157.0 5.037.032.5M653040MSM020B 16141.032.564.364.5140.5140.57.037.038.0M6530MSM030B 16141.032.564.364.5111.0144.07.037.038.0M6530MSK030C 16141.032.564.364.5188.0213.07.037.038.0M6530VRDM36816141.032.564.364.5116.0157.0 5.037.038.0M653050MSM030C 16158.038.580.864.5138.5171.57.037.046.5M8533MSK030C 16158.038.580.864.5188.0213.07.037.046.5M8533MSK040C 16172.038.580.888.0185.5215.58.051.046.5M8533VRDM39716172.038.580.888.0110.0157.010.051.046.5M853363MSM040B 16212.054.089.7116.0157.5191.58.066.056.5M8533MSK040C 16212.054.089.7116.0185.5215.58.066.056.5M8533MSK050C 16212.054.089.7116.0203.0233.09.066.056.5M8533VRDM391016212.054.089.7116.0140.0186.510.066.056.5M853380MSK040C 16252.054.0132.2116.0185.5215.58.066.072.0M10535MSK050C 16252.054.0132.2116.0203.0233.09.066.072.0M10535MSK060C 16252.054.0132.2116.0226.0259.09.566.072.0M10535MSK076C 16289.054.0132.2160.0–292.510.090.072.0M10535VRDM391016252.054.0132.2116.0140.0186.510.066.072.0M10535100MSK060C 16272.063.5134.7116.0226.0259.09.566.089.0M10535MSK076C16289.064.5134.7160.0–292.510.090.089.0M10535L RV0 = L EMC + L RVShown in a retracted positionAccessories are attached at the rear end of the belt drive. The fasteners are included in the scope of delivery.1)cation:Smooth shaft with shaft seal ringMotor RecommendedcontrollerElectromechanical Cylinder EMC3240506380100MSK 030 C HCS02.1E-W0012 MSK 040 C HCS02.1E-W0028 MSK 050 C HCS02.1E-W0028 MSK 060 C HCS02.1E-W0028 MSK 076 C HCS02.1E-W0054 MSM 020B DKC**.3-004 MSM 030B DKC**.3-008 MSM 030C DKC**.3-012 MSM 040B DKC**.3-018 VRDM 368TLD 011F VRDM 397TLD 011F VRDM 3910TLD 011F VRDM 3913TLD 011FL EL E1AC servo motors MSKDimensionsMotor typeDimensions (mm)AB 1B 2ØD ØE ØF ØG H 1H 2H 3L E without brake L E with brake L E1L 1R k6j6MSK 030C 5420 2.594063 4.571.557.442.0188.0213.07.0–R5MSK 040C 8230 2.5145095 6.683.569.031.0185.5215.58.042.5R8MSK 050C 9840 3.019951159.085.571.043.5203.0233.09.055.5R8MSK 060C 11650 3.024951309.098.084.037.0226.0259.09.548.0R9MSK 076C140504.02411016511.0110.095.657.5292.5292.510.079.0R12Description Symbol Unit MSK030C-0900MSK040C-0600MSK050C-0600MSK060C-0600MSK076C-0450Part number with brake R347108503R347108603R347108903R347109003R347109303without brake R347108403R347108703R347108803R347109103R347109203Maximum useful speed n max(min –1)90005600570052005000Maximum torque M max(Nm)48.1152443.5Rated torque M N (Nm)0.8 2.7 5.08.012.0Rotor mass moment of inertia J rot (10–6kgm 2)301403308004300Mass without brake m (kg) 2.1 3.6 5.48.413.8Holding brake Holding torque M Br (Nm) 1.0 4.0 5.010.011.0Brake mass moment of inertia J Br (10–6kgm 2)72310755360Mass of brake m Br (kg)0.250.320.70.45 1.1NoteThe motors can be delivered complete with controllers.More information about motors and controllers can be found in the catalogs.Motor data independent of EMCMotorsL EL E1Servo motors MSMDimensionsMotor data independent of EMCMotor typeDimensions (mm)AB 1B 2ØD ØE ØF ØG H 1H 2H 3L E without brake L E withbrake L E1h6h7MSM 020B 4224 28224834552738.8109.0140.57MSM 030B 6030311507045732734.0111.0144.07MSM 030C 60303145070 4.5732761.5138.5171.57MSM 040B803531970906.0932776.0157.5191.58Description Symbol UnitMSM 020B MSM 030B MSM 030C MSM 040B Part numberwith brake R347106903R347107103R347107303R347107503without brakeR347106803R347107003R347107203R347107403Maximum useful speed n max (min –1)3000300030003000Maximum torque M max (Nm)0.95 1.91 3.87.1Rated torqueM N (Nm)0.300.64 1.2 2.4Rotor mass moment of inertia J rot (10–6kgm 2)3.2010.0017.0067.00Mass without brake m (kg)0.500.96 1.5 3.1Holding brake Holding torqueM Br (Nm)0.29 1.27 1.27 2.45Brake mass moment of inertia J Br (10–6kgm 2)0.40 3.00 3.008.00Mass of brake m Br(kg)0.200.400.40.7NoteThe motors can be delivered complete with controllers.More information about motors and controllers can be found in the catalogs.L +0.746.532.522.51014Ø83.5ØD h 8Ød h 65135Ø15–130R8,260°Ø 6.519253185702VRDM 368VRDM 397, 3910, 39132037215Ø8Ø5.1( )0–0.01321.5Ø38.1±0.025Ø38.1–0.013L ±0.51.6585847.257.2R512354Dimensions3-phase stepper motors VRDMMotor connection BrakeBrake connection Key1)2)3)4)Description Symbol Unit VRDM 368VRDM 397VRDM 3910VRDM 3913Rated torque M N (Nm) 1.5 2.0 4.0 6.0Holding torqueM H (Nm) 1.7 2.26 4.526.78Rotor mass moment of intertia w/o brake J rot (10–4kgm 2)0.38 1.10 2.203.30Step countz 200/400/500/1000/2000/4000/5000/10000Step angle per step a (°) 1.8/0.9/0.72/0.36/0.18/0.09/0.072/0.036Encoder resolution 1000 increments/revolutionMass without brake m (kg) 1.00 2.05 3.10 4.20Holding brake Holding torqueM Br (Nm) 1.0 6.0Brake mass moment of inertia J Br (10–4kgm 2)0.0160.200Mass of brakem Br(kg)0.51.5Motor typePart numberModelShaft diameterOverall lengthPilot diameterholding brake d L D without with (mm)(mm)(mm)VRDM 368R3471 035 06X8 –0.01311638.1 ±0.025R3471 036 06XVRDM 397R3471 037 06X12 h611060.0 h8R3471 038 06XVRDM 3910R3471 039 06X12 h614060.0 h8R3471 040 06XVRDM 3913R3471 041 06X14 h617060.0 h8R3471 042 06XMotorsMotor data independent of EMCAxially spring-mounted rotorNoteThe motors can be delivered complete with controllers.Group1234561) 2)2)2)2)2)3) AccessoriesGroup Description Size Part number1Clevis32R3499 361 0040R3499 362 0050R3499 363 0063R3499 364 0080R3499 365 00100R3499 366 001Counter supportblock32R3499 373 0040R3499 374 0050R3499 375 0063R3499 376 0080R3499 377 00100R3499 378 00Group Description Size Part number2Nut32R1823 300 02040R1823 300 02150R1823 300 03063R1823 300 03080R1823 300 031100R1823 300 0312Sphericalbearing32R3499 385 0040R3499 386 0050R3499 387 0063R3499 388 0080R3499 389 00100R3499 390 00Nut is included in the scope of delivery. Can be ordered as an accessory1)for RV0 3) only for MF02)Group Description Size Part number 2Clevis32R3499 391 0040R3499 392 0050R3499 393 0063R3499 394 0080R3499 395 00100R3499 396 002Balance couplingwith attachmentplate32R3499 397 00 40R3499 398 00 50R3499 399 00 63R3499 400 00 80R3499 401 00 100R3499 402 002Flex-coupling32R3499 379 0040R3499 380 0050R3499 381 0063R3499 382 0080R3499 383 00100R3499 384 00 3, 5Trunnion32R3499 403 0040R3499 404 0050R3499 405 0063R3499 406 0080R3499 407 00100R3499 408 003, 4, 5Bearing fortrunnion32R3499 409 00 40R3499 410 00 50R3499 411 00 63R3499 412 00 80R3499 413 00 100R3499 414 003, 4, 5Bearing fortrunnion - plastic32R3499 415 00 40R3499 416 00 50R3499 417 00 63R3499 418 00 80R3499 419 00 100R3499 420 003, 5Head/end capattachment32R3499 421 00 40R3499 422 00 50R3499 423 00 63R3499 424 00 80R3499 425 00 100R3499 426 003Flange mountattachment A32R3499 427 00 40R3499 428 00 50R3499 429 00 63R3499 430 00 80R3499 431 00 100R3499 432 004Pivot attachment32R3499 433 0040R3499 434 0050R3499 435 0063R3499 436 0080R3499 437 00100R3499 438 00Group Description Size Part number 5Flange mountattachment32R3499 439 0040R3499 440 0050R3499 441 0063R3499 442 0080R3499 443 00100R3499 444 00 5Flange mountattachment B32R3499 445 0040R3499 446 0050R3499 447 0063R3499 448 0080R3499 449 00100R3499 450 00 5Counter supportbearing D32R3499 457 0040R3499 458 0050R3499 459 0063R3499 460 0080R3499 461 00100R3499 462 00 6Bearing blockCETOP32R3499 475 0040R3499 476 0050R3499 477 0063R3499 478 0080R3499 479 00100R3499 480 00 6Swivel mount32R3499 481 0040R3499 482 0050R3499 483 0063R3499 484 0080R3499 485 00100R3499 486 00 5Fork head swiveljoint attachmentfor sphericalbearing32R3499 451 0040R3499 452 0050R3499 453 0063R3499 454 0080R3499 455 00100R3499 456 00 5Bolt32R3499 367 0040R3499 368 0050R3499 369 0063R3499 370 0080R3499 371 00100R3499 372 00 6Countersupport C32R3499 463 0040R3499 464 0050R3499 465 0063R3499 466 0080R3499 467 00100R3499 468 00 6Countersupport B32R3499 469 0040R3499 470 0050R3499 471 0063R3499 472 0080R3499 473 00100R3499 474 000020406080100120200400600750v (m /m i n )12x1012x516x1616x1016x520406080100v (m /m i n )12002004006007500204060801001200200400600800900v (m /m i n )20x2020x5REMC 32EMC 40EMC 50Permissible SpeedsStroke (mm)Stroke (mm)Stroke (mm)21Bosch Rexroth Corporation 020406080100120050010001200v (m /m i n )25x2525x1025x5v (m /m i n )204060801001200200400600800100012001400150032x3232x2032x1032x520406080100120020040060080010001200140016001800200040x4040x2040x1040x5v (m /m i n )EMC 63EMC 80EMC 100Electromechanical Cylinder EMC R310A 3306 (2008.01)Stroke (mm)Stroke (mm)Stroke (mm)22Bosch Rexroth Corporation 12x10Rx2-212x5Rx2-40.00.10.20.30.40.50.60.70.80501001502002503003504004505005506006507007500.02.04.06.08.010.012.014.0010020030040050060070080090020x20Rx3.5-320x5Rx3-416x16Rx3-316x10Rx3-316x5Rx3-40.01.02.03.04.05.06.07.0050100150200250300350400450500550600650700750FEMC 32EMC 40EMC 50Electromechanical Cylinder EMC R310A 3306 (2008.01)Permissible Drive T orqueD r i v e t o r q u e (N m )D r i v e t o r q u e (N m )D r i v e t o r q u e (N m )Drive torque (Nm)Stroke23Bosch Rexroth Corporation 0.05.010.015.020.025.030.035.040.045.0010020030040050060070080090010001100120025x25Rx3.5-325x10Rx3-425x5Rx3-40.010.020.030.040.050.060.070.0010020030040050060070080090010001100120013001400150032x5Rx3,5-432x10Rx3.969-532x20Rx3.969-332x32Rx3.969-340x40Rx6-340x5Rx3.5-40.020.040.060.080.0100.0120.0140.0050010001500200040x20Rx6-340x10Rx6-4EMC 63EMC 80EMC 100Electromechanical Cylinder EMC R310A 3306 (2008.01)D r i v e t o r q u e (N m )D r i v e t o r q u e (N m )D r i v e t o r q u e (N m )24Bosch Rexroth Corporation (m )10020030040050060005010015020025030035040045050055060065070075012x1012x5(m )5001000150020002500300005010015020025030035040045050055060065070075016x1016x1616x5(m )01002003004005006007008009000100020003000400050006000700020x520x20FEMC 32EMC 40EMC 50Electromechanical Cylinder EMC R310A 3306 (2008.01)Permissible Axial ForceStroke (mm)Stroke (mm)Stroke (mm)Drive torque (Nm)StrokeF p e r m .F p e r m .F p e r m .25Bosch Rexroth Corporation (m )20040060080010001200140002000400060008000100001200014000160001800032x532x1032 X2032X32(m )02004006008001000120002000400060008000100001200025x1025x525X25(m )200400600800100012001400160018002000050001000015000200002500040x540x1040X2040X40EMC 63EMC 80EMC 100Electromechanical Cylinder EMC R310A 3306 (2008.01)Stroke (mm)Stroke (mm)Stroke (mm)F p e r m .F p e r m .F p e r m .26Bosch Rexroth Corporation Electromechanical Cylinder EMC R310A 3306 (2008.01)SizeBall screw driveLead (mm)Stroke (mm)Seal system Preload Accuracy class Ball nut Screw shaft end EMC32510 . . .Standard 01Reduced backlash01T7Standard00Standard00EMC4051016. . .Standard 01Reducedbacklash01T7Standard 00Standard 00EMC50520. . .Standard 01Reducedbacklash01T7Standard 00Standard 00Confi guration and OrderingWhen ordering:Please state the option number given in the box, as appropriate (e.g. 01 )Order example:Ordering data Option Option code DescriptionEMC EMC50Electromechanical Cylinder size 50Lead 5Lead 5 mmStroke 200Nominal stroke 200 mm KGT-nut 00Standard Journal00StandardMotor mountRV02Belt drive, option 2Adaptor kit for motor 23Attachment kit for belt drive for Motor MSM 030C Motor73Motor MSM 030C with brake Documentation 000Standard documentation Accessories 1Group 1ClevisAccessories 2Group 2Spherical bearingAccessories 3Group 5Head/end cap attachment27Bosch Rexroth Corporation RV01RV02RV03RV041)Electromechanical Cylinder EMC R310A 3306 (2008.01)Motor mount Motor DocumentationFig. 1, Fig. 2Gear reductionAttachment kit for motor without brake with brake OF01000000Standard(acceptance test report)000MF010001MSM020B 686902MSM030B 707105MSK030C 848510VRDM3683536RV01RV02RV03RV04Standard i=10021MSM020B 686922MSM030B 707125MSK030C 848530VRDM3683536OF01000000MF010001MSM020B 686902MSM030B 707105MSK030C 848510VRDM3683536RV01RV02RV03RV04Standard i=10021MSM020B 686922MSM030B 707125MSK030C 848530VRDM3683536OF01000000MF010003MSM030C 727305MSK030C 848506MSK040C 868711VRDM3973738RV01RV02RV03RV04Standard i=10023MSM030C 727325MSK030C 848526MSK040C 868731VRDM3973738Motor mount / Attachment kit Belt driven Fig. 1Fig. 2without motor mount OF01with motor mount MF01Slot for switches1)28Bosch Rexroth Corporation Electromechanical Cylinder EMC R310A 3306 (2008.01)SizeBall screw driveLead (mm)Stroke (mm)Seal system Preload Accuracy class Ball nut Screw shaft end EMC6351025. . .Standard 01Reduced backlash01T7Standard00Standard00EMC805102032. . .Standard01Reducedbacklash01T7Standard 00Standard 00EMC1005102040. . .Standard01Reducedbacklash01T7Standard 00Standard 00Confi guration and OrderingOrdering data Option Option code DescriptionEMC EMC80Electromechanical Cylinder EMC size 80Lead 5Lead 5 mmStroke 200Nominal stroke 200 mm Ball nut00Standard Screw shaft end 00StandardMotor attachment RV02Belt drive, option 2Attachment kit for 27Attachment kit for belt drive for Motor MSK050C Motor89Motor MSK050C with brake Documentation 000Standard documentation Accessories 1Group 1ClevisAccessories 2Group 2Spherical bearingAccessories 3Group 5Head/end cap attachmentOrder example:When ordering:Please state the option number given in the box, as appropriate (e.g. 01 )29Bosch Rexroth Corporation RV01RV02RV03RV041)Electromechanical Cylinder EMC R310A 3306 (2008.01)Motor mount Motor DocumentationFig. 1, Fig. 2Gear reductionAttachment kit for motor without brake with brakeOF01000000Standard(acceptance test report)000MF010004MSM040B 747506MSK040C 868707MSK050C 888911VRDM39103940RV01RV02RV03RV04Standard i=10024MSM040B 747526MSK040C 868727MSK050C 888931VRDM39103940OF01000000MF010004MSM040B 747507MSK050C 888908MSK060C 909109MSK076C 929312VRDM39133940RV01RV02RV03RV04Standard i=10024MSM040B 747527MSK050C 888928MSK060C 909129MSK076C 929332VRDM39133940OF01000000MF010008MSK060C 909109MSK076C 929313VRDM311174344RV01RV02RV03RV04Standard i=10028MSK060C 909129MSK076C 929333VRDM311174344Motor mount / Attachment kit Belt driven Fig. 1Fig. 2without motor mount OF01with motor mount MF01Slot for switches1)30Bosch Rexroth Corporation Electromechanical Cylinder EMC R310A 3306 (2008.01)Inquiry / Order FormOrdering example: EMC80Ordering data ExplanationSize = EMC80Lead = 5Lead 5 mmStroke = 200Nominal stroke 200 mm Ball nut= 00Standard Screw shaft end = 00StandardMotor attachment = RV02Belt drive option 2Attachment kit = 27Attachment kit: belt drive for motor MSK050C Motor= 89Motor MSK050C with brake Documentation = 000Standard documentation Accessories 1= group 1ClevisAccessories 2= group 2Spherical bearingAccessories 3= group 5Head/end cap attachmentTo be completed by customer: Inquiry / Order Electromechanical Cylinder EMC Size = ________________________Lead = ________________________Stroke = ________________________Ball nut= 00Screw shaft end = 00Motor attachment = ________________________Attachment kit = ________________________Motor= ________________________Documentation = ________________________Accessories 1= ________________________Accessories 2= ________________________Accessories 3= ________________________Quantities:______________ pcs, _____________ per month, ______________ per year, per order, or ______________Comments:FromCompany:_________________________________________Name:_________________________________________Address:_________________________________________Department:__________________________________________________________________________________T elephone:__________________________________________________________________________________Fax:_________________________________________For an explanation of ordering parameters, see pages 26-28 “Confi guration and Ordering”Bosch Rexroth Corporation 14001 South Lakes Drive Charlotte, NC 28273Phone: (704) 583-4338 / 800-438-5983 Fax: (704) Bosch Rexroth Corporation Corporate Headquarters 5150 Prairie Stone ParkwayHoffman Estates, IL 60192-3707T elephone (847) 645-3600Facsimile (847) 645-6201Bosch Rexroth Corporation Industrial Hydraulics2315 City Line RoadBethlehem, PA 18017-2131T elephone (610) 694-8300Facsimile (610) 694-8467Bosch Rexroth Corporation Electric Drives and Controls 5150 Prairie Stone ParkwayHoffman Estates, IL 60192-3707T elephone (847) 645-3600Facsimile (847) 645-6201 Bosch Rexroth Corporation Pneumatics1953 Mercer RoadLexington, KY 40511-1021T elephone (859) 254-8031Facsimile (859) 281-3491Bosch Rexroth Corporation Mobile Hydraulics1700 Old Mansfield Road Wooster, OH 44691-0394T elephone (330) 263-3300Facsimile (330) 263-3333Printed in the United States Bosch Rexroth Corporation Linear Motion andAssembly T echnologies 14001 South Lakes Drive Charlotte, NC 28273T elephone (800) 438-5983Facsimile (704) R310A 3306。
Endrich NBIoT M910-GL 三模LPWA模块说明书

Fibocom has developed the brand new LPWA module M910-GL. M910-GL is a multi-mode (LTE Cat.M1, LTE Cat.NB1 and EGPRS) IoT wireless communication module which supports half-duplex LTE and GSM. It can provide data connection in LTE-FDD, LTE-TDD, GPRS and EGPRS networks, and also supports GNSS and VOLTE (LTE C at.M1). The module is available with LGA footprint (27.6 x 25.4 x 2.3 mm) and global certifications.It is characterized by low power consumption and robust accessibility even inside buildings. In addition, it is very cost effective and has an enormous range, which opens up new possibilities for applications in cities or agriculture.The module is primarily recommended for applications in which low data throughput rates have to be transmitted securely, like asset tracking, industrial monitoring and control, security systems, smart home, smart metering, etc.APPLICATIONS• Asset tracking• Industrial monitoring and control • Security systems • Smart home • Smart meteringFEATURESDimension 25.40 x 27.60 x 2.30 mm PackageLGA, 120PinOperating Frequency BandLTE FDD: B1/B2/B3/B4/B5/B8/ B12/B13/B18/B19/B20/B26/B28 LTE TDD: B39 (Cat.M1 only)GSM: GSM850/GSM900/ DCS1800/PCS1900Power Supply 3.3 V ~ 4.3 V (3.8 V recommended)Operating Temperature -40 °C ~ +85 °CeSIM eCallOptionalJamming Detection USSD STK DFOTA GNSS LBS PSMeDRX SMS OS Driver Linux/Win, XP/Win, 7/Win, 8/Win10/AndroidVoLTE ProtocolsPPP/TCP/UDP/IPV4/IPV6/SSL/TLS/ FTP(S)/HTTP(S)DATA TRANSMISSIONCat.M1 (DL / UL)375 / 375 kbps Cat.NB1 (DL / UL)32 / 70 kbps GPRS (DL / UL)107 / 85.6 kbps EDGE (DL / UL)296 / 236.8 kbpsINTERFACESAntennaMain x 1, GNSS x 1Functional InterfacesUSIM 3.0V/1.8VAPPLICATIONS • Commercial refrigerator • Freezer • Icemaker• Vending machine • Air-conditioningUF-T12ABPB0AM1D4AMore than 60 % energy saving Higher efficiency with more air flowSelectableCustomized speedApplicable for ErP2015IP55 / IP68 / ATEX is available for choiceHAVE A LOOKHAVE A LOOKTMR-sensors from C ROC US are based on a new technology for magnetic field measurement. The main advantage of the TMR-sensors compared to Hall-sensors are low current consumption and high sensitivity.The basic unit of TMR-sensors is the so called magnetic logic unit (MLU) which is a stack of several layers of different materials. The resistance of this stack perpendicular to the layers is dependent on the orientation of an external magnetic field compared to a fixed axis.The substrate for this stack is an antiferromagnetic layer. Above this layer there is the so called pinned layer which is a ferromagnetic layer that has a fixed magnetization in a fixed direction. The direction of this magnetization defines the reference direction and it cannot be changed by an external field. Above this pinned layer there is a very thin, insulating layer with a thickness of only a few Nanometers. Above this insulaing layer another magnetic layer is deposited. The orientation of the magnetization of this so called free layer can be influenced by a external field. The resistance of the whole stack of layers is dependent on angle between the magnetizations of the free and the fixed layer. It can be measured by applying a voltage at conducting electrodes at the top and bottom side of the stack. The resistance of the stack varies between 10 kΩ and 60 kΩ. This resistance range of the MLU is much higher compared to other magnetoresistive technologies like AMR (Anisotropic Magnetic Resistance) und GMR (Giant Magneto Resistance). The field necessary to rotate the magnetization of the free layer is quite small. Most of the TMR-sensors operate below 10 mT, some even below 1 mT.FEATURES OF CT83xx-SERIES• Low power consumption of down to typ. 200nA • High sensitivity of typ. 600 mV / mT @ 3 V• Stable performance over temperature with a linearity error of down to less than ±0.25 %• Open drain or push pull output • SOT23 or LGA packageFEATURES OF CT400 CURRENT SENSOR• High Sensitivity • Differential Outputs• Supply Voltage: 1.0 V to 5.5 V• 6-lead SOT23 package or 6-lead DFN packageAPPLICATIONS OF CT83xx-SERIES• Low power assemblies like metering or general battery driven devices• Tamper-proofing for utility meters • Fluid level detection • Reed switch replacement • Motor controllers• Door closure detectionAPPLICATIONS OF CT400 CURRENT SENSOR • Battery Management Systems • Motor Control • White Goods• Power Utility Meters• Over-Current Fault Protection • Induction Cooking • Renewable EnergyBasically this technology can be used to build magnetic switches or magnetic sensors with analog output. For magnetic switches the current through the MLU is measured and a comparator drives the output stage of the sensor (either open collector or push-pull) high or low, depending on fixed internal threshold values.The most important switch family is the C T83xx-series. Latches, unipolar and omnipolar types with different switching fields are available. Most members of this family work internally in a pulsed mode and this leads to a current consumption down to 200 nA for some types, depending on the duty cycle.However, TMR-sensors can also be used as analog sensors measuring the strength of the magnetic field as well. This allows measuring the distance between a magnet and the sensor. C urrent sensing is also possible with this technology because electrical current always produces a magnetic field.Since this magnetic field decreases very strongly with distance between the conducting wire and the sensor, the TMR-sensors are a good choice for simple current sensors due to their high sensitivity to small magnetic fields. The CT100 is a linear contactless current sensor in full-bridge configuration. The CT100 enables high accuracy current measurements for many consumer, enterprise and industrial applications. The CT100 is a non-intrusive current sensor that can be adapted to measure different current ranges.TMR-Sensor : Resistance depends on the orientation of the external magnetic field relative to the internal fixed magetization (blue arrow)Layer structure ofthe Magnetic Logic UnitAPPLICATIONS• Industrial Control Interfaces • Dash Boards • Digital Signage• Interactive Classrooms • Meeting RoomsPrecise optical bonding processes combined with chemically etched glasses and super high brightness backlights contribute a perfect readability in all environments. Additionally, reflections are reduced by the chemically etched cover lens with anti-glare coating. In direct sunlight, bright enlightened shopping centers or industrial workshops, the displays’ quality is always crystal clear. Also, Faytech guarantees zero dead pixels at all TFT-displays! As option, an ambient light sensor can be integrated enabling automated backlight dimming, e.g. at night time. Equipped with various interfaces these monitors can be connected to any computer system. There are touch drivers available for Windows, Linux, Mac and Android.SerialUSB12 V DC-InVGA Audio DVI-D HDMI 1.315.0” FTE15HDKSUPER HIGH BRIGHTNESS1500 cd / m 2ULTRA-HD RESOLUTIONOPTICALLY BONDED CAPACITIVE MULTI TOUCH86"2,1844 mHAVE A LOOKCUSTOMIZED TEMPERATURE SENSORS FEATURES• Extensive use in all global automotive brands • D ozens of customized assemblies for battery and EV motor applications • Already high market share for Japanese hybrid car batteries • C ompetitive pricing especially for integrated design assemblies (sensor part + resin mold)APPLICATIONS• Automotive applications • Consumer products• Instrumentation industrial ovens • Electric showers• HVAC and refrigeration • Fire detectors• Battery management systems • E-mobilityAPPLICATIONS • EV batteries• Electric motors • Air conditioners • CapacitorsSPECIFICATIONS OF TT-4:Part No.TT4Measurement element NTC, PTC, PtRTD, KTY, DS1820Resistance tolerance ±0.2 ... ±5 %B-Value (25 / 85)2700 ... 5100 KWires / Cables PVC, Silicone, FEP, Fiberglass insulation, etc.Diameter >1.25 mm Temperature range-80 ... 800 °CBATTERY MODULE STEERING- & SEAT HEATER INVERTER / CONVERTER AIR CONDITIONING MODULE MOTOR MODULEAttached to PCB by crewFoil NTCCell pack Epoxy dipping type High precision typeATF oil submersionHigh temp. range typeScrew fix typeFEATURES• Proven stability and reliability • Low cost • V ariety of metal and plastic housings and tubings designed for specific applications • P otted with different kinds of resin for reliable sensor protection • P rovides good protection from the environmental conditions• P roven high voltage and dynamic strength• Available with special cables (2-core cables or stranded with PVC, teflon or kynar insulation, cables with screen & other), connectors and other attachments • W ide range of resistance and temperature characteristics • D esigned for temperature measurement, temperature control and temperature compensationTEWA temperature sensors offer a wide range of standard and customized temperature sensors designed according to individual customer’s requirements covering applications in temperature range between -80 °C and +800 °C. The TT-4 series group contains temperature sensors using NTC / PTC thermistors, PTRTDs and other sensing elements mounted into a wide range of metal /plastic housings.HAVE A LOOKHAVE A LOOKFEATURESSound Quality• Membrane active transformation itself (direct conversion), self-moving without coil assembly• High resolution for mid-high frequency play• To have wide band function by ACTS / dynamic combination • Input / output impedance internally matched to 50Ω• Global Navigation Satellite Systems (GLONASS)APPLICATIONS• Communication devices like headsetsmm package offers a very SR106560EP01NSR080670HP01NDemokit Headset from BSEEndrich is proud to introduce the new EARPHONE RECEIVER Technology “Advanced Concept & Technology speaker” (ACTS) from BSE. The ACTS are perfectly used for some new Earphone Receiver, which are found in headsets.HAVE A LOOKHAVE A LOOKHEADQUARTERSENDRICH Bauelemente Vertriebs GmbH P.O.Box 1251 · 72192 Nagold, Germany T +49 (0) 7452 6007-0F +49 (0) 7452 6007-70*******************SALES OFFICES IN EUROPESwitzerland − Novitronic Zurich:T +41/44 306 91 91******************France Paris:T +33/186653215******************Lyon:T +33/186653215*******************Bulgaria Sofia:********************Spain Barcelona:T +34/93 217 31 44*****************Hungary Budapest:T +361/2 97 41 91*******************Austria & Slovenia Brunn am Gebirge:T +43/1 665 25 25*******************Romania Timisoara:*******************INPAQ Technology C o., Ltd. is the world leading patch antenna manufacturer that specializes in all kinds of GPS / GNSS antennas including GPS ceramic substrate. Ceramic patch antenna is widely used in global positioning systems, provided by INPAQ in different shapes, sizes and a high-gain, low return loss, low axial ratio characteristics of the ceramic antenna.For navigation systems, different Stacked Patch Antenna solutions are designed. As Dual Band GPS could enhance the positioning accuracy to the next level – it will be improved from 10 meter grade to centimeter grade. INPAQ is ready for Tier 1, to customize GPS L1L2L5L6 antennas according to their need to meet the requirements of the new systems design on self-driving automotive systems. Peak Gain Radiation for above design examples is up to 4.9 dBic for L1, L2 and L5 Band.Additional L1L2L5L6 Full Band C hip Antenna (5.0 x 3.6 mm SMD Antenna) is already available for test, as AC LX-5036-A1-C C -S. This antenna is a coupling antenna with linear polarization. The Application PCB will be used as an antenna.INPAQ is ready for Tier 1, GPS L1L2L5L6 stack proposal, and 5G application to connect everything, including self-driving needed L1L2L5L6 to get message of precise position; via 3D Lidar or 77 GHzRadar is for relative position message. Connected car, automated car, smart car, self-driving car do difference by the degrees of ADAS (Advanced Driver Assistance Systems) and application method.APPLICATIONS• Self-driving• Connected car • Automated car• ADAS (Advanced Driver Assistance Systems)• Smart carPatch AntennaChip AntennaHAVE A LOOK。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Reading comprehension
1. According to the passage, what kind of people are most likely to take drugs? _________ D A. People who fail in exams. B. People who want to kill himself. C. People who break up with his lover. D. People who want to make friends with those using drugs
M10U3 Project
Just say NO!
Where there is violence, drugs are _______ behind it. Where there is AIDS, drugs are behind it.
M10U3 Project
Just say
NO to drugs _______!
16. 使使用的人产生愉悦的幻觉 L22
Phrases
give users an artificial sense of pleasure
17. 如果大量饮用 L30
if consumed in large quantities
Phrases
18. 在严重的情况下 L34
in severe cases 19. 抽干吸食者的活力 L38 suck the life right out of a person 20. 重新开始 L45 start over again
Reading comprehension
3. We can learn from the passage that ________. A A. all drugs are not illegal B. there are three classes of drugs C. you will be punished if caught taking drugs D. using downers makes users energetic
Downers (镇定剂) — More addictive than uppers. ●harmful effects: ﹡8.decreasing __________ the heart rate Causes ﹡causing headaches, depression, shallow and breathing, a weak pulse and even death effects ●examples: of slow the brain and the ﹡heroine: 9. ______ different body’s reactions; smoked and injected drugs ﹡alcohol: 10. damage ________the liver and do great harm if consumed in large quantities
Reading comprehension
2. Suppose you are a doctor, what kind of advice will you give to the potential drug users? ______ C A. Give drugs to others but not to take any yourself. B. Take just a little to see the consequences of taking drugs. C. Say no to drugs to protect your health and life. D. Avoid drugs or you will end in prison.
case study 案例研究 Phrases 1. 被提拔了 P43 be promoted at work 2. 压力很大P43 be under a lot of pressure 3. 她的鼻子流血了。P43 Her nose started bleeding. 4. 失去了知觉P43 become unconscious 5. 警告他们在没必要的情况下吃抗生素的风险P43 warn them of the dangers of taking antibiotics when it is not necessary 6. 以糟糕的境地结束 L1 end in a messy situation 7. 非法吸毒L4 take drug illegally
Uppers (兴奋剂) ●side effects: ﹡5. increasing _________ the heart rate ﹡causing such 6. ___________ as a symptoms sore jaw, toothaches, difficulty Classes _________ sleeping, heart attacks and even death and effects ●7. __________: of different ﹡uppers —speed: taken as a tablet or examples drugs capsule; often used as weight-loss pills ﹡legal uppers—nicotine and caffeine: found in cigar, cigarette, coffee, tea and chocolate
Ways to _______ break drug addiction
Phrases
1. 被提拔了 P43 2. 压力很大P43 3. 她的鼻子流血了。P43 4. 失去了知觉P43 5. 警告他们在没必要的情况下 吃 抗生素的风险P43 6. 以糟糕的境地结束 L1 7. 非法吸毒L4 8. 反抗家庭或社会L5 9. 使人上瘾 L12 10. 毒品对我们健康的副作用 L14 11. 通常被用作减肥药L16 12. 降低人的食欲L17
14. 很难戒烟 L20 15. 通常被称为/ 归类为镇定剂 L21 / L29 16. 使使用的人产生愉悦的幻觉 L22 17. 如果大量饮用 L30 18. 在严重的情况下 L34 19. 抽干吸食者的活力 L38 20. 重新开始 L45 21. 消除过去的污点 L45 22. 到医院或戒毒所寻求帮助 L47 23. 包括住院 L48 24. 帮助戒毒 L49 25. 首先、一开始 L 53
21. 消除过去的污点 L45
wipe away the stain of the past seek help from a hospital or drug clinic include a stay in hospital
●Determined by the type and quantity _______ of illegal drugs a person is carrying; Punishment ●14. ________ Ranging from a small fine and a few ____________ for taking drugs days in prison to a large fine and the death penalty. ●15. Admitting __________ their problems with drugs ●16. Seeking _______ help from a hospital ﹡a stay in hospital and taking special medicines ﹡have individual or group sessions with a psychologist ●not using illegal drugs in the first place
Skimming What are mentioned in the article about drugs?
Reasons ____________for taking drugs Classes and effects _____________________of drugs ____________for taking drugs Punishment ____________to break drug addiction. Ways
Uppers (兴奋剂) Downers (镇定剂) — More addictive than uppers.
confusing Drugs 11. _________the brain (迷幻药) _____ done to users: Causes ●12. harm ﹡changing the way people think and see and the world effects of ﹡confusing the brain and sometimes differe cause people to see or hear 13. _______ unreal nt things drugs ●example: ﹡LSD: increasing blood sugar and heart rate; causing acute anxiety, extreme mood changes and even committing suicide
离开、不接近 1. stay away from P38 避免接近、远离、勿靠近 2. keep away from P38 3. get out of the habit of doing sth P38改掉做某事的习惯 4. break the habit of doing sth P38 改掉习惯 5. kick/break the habit 戒掉(烟瘾等)/改掉(坏)习惯 6. be in the habit of doing/ have a habit of doing 有做某事的习惯 7. get into/ in the habit of doing 养成做某事的习惯 8. develop/ form a habit 养成一个习惯 9. avoid doing / stop doing/ quit doing/ give up doingP38庭或社会L5 rebel against their families or society 9. 使人上瘾 L12 make people addicted 10. 毒品对我们健康的副作用 L14 the side effects of drugs on our health 11. 通常被用作减肥药L16 be often used as a weight-loss pill 12. 降低人的食欲L17 reduce one's appetite 13. 很容易对尼古丁上瘾L19 become easily addicted to nicotine 14. 很难戒烟 L20 have trouble quitting smoking 15. 通常被称为/ 归类为镇定剂 L21 / L29 be often referred to/ classified as downers