第8章 高级 GPSS 程序设计(下)
第八章 GPS测量的设计与实施讲义
8.1 GPS测量的技术设计GPS实际工作中可划分为方案设计、外业实施及内业数据处理三个阶段。
GPS定位基本性工作:它是根据国家有关规范(规程)及GPS 网用途、用户的要求对测量工作的网形、精度及基准等的具体设计。
8.1.1 GPS网技术设计的依据1.主要依据:GPS测量规范(规程)和测量任务书以及各部委根据本部门GPS工作实际情况制定的其他GPS测量规程和细则。
2.测量任务书测量任务书或测量合同是测量施工单位上级主管部门或合同甲方下达的技术要求文件。
这种文件是指令性的,规定了测量任务的范围、目的、精度和密度要求,提交成果资料的项目和时间,完成任务的经济指标等。
GPS方案设计时,一般首先依据测量任务书提出的GPS网的精度、密度和经济指标,在结合规范(规程)规定并现场踏勘具体确定各点间的连接方法,各点设站观测的次数、时段长短等布网观测方案。
8.1.2 GPS网的精度、密度设计1.GPS测量精度标准及分类①用途分级、精度分级。
用于全球性地球动力学、地壳形变及国家基本大地测量的GPS网可参照《规范》中AA、A、B级的精度分级;用于城市或工程的GPS控制网可根据相邻点的平均距离和精度参照《规程》中的二、三、四等和一、二级。
②GPS弦长精度表示2)2δ=a+(bd③实际工作依据单位实际情况(人力、物力、财力)布设,分级布设也可以越级布设或布设同级全面网。
2.GPS点的密度标准《规范》表8-3《规程》一般工程测量布设点的密度主要满足测图加密和工程测量的需要,平均边长往往在几公里以内。
8.1.3 GPS网的基准设计GPS网的基准包括位置基准、方位基准和尺度基准。
方位基准一般以给定的起算方位角值确定,也可以由GPS基线向量的方位作为方位基准。
尺度基准一般由地面的电磁波测距边确定,也可以由两个以上的起算点间的距离确定,同时也可以由GPS基线向量的距离确定。
GPS网的位置基准,一般都是由给定的起算点坐标确定。
因此,GPS网的基准设计,实质上指确定网的位置基准问题。
gpss课件
START
100
END
基本模块小结
与活动实体有关的模块:
1. GENERATE 2. TERMINATE 3. ADVANCE 4. ASSIGN 5. TRANSFER
LINE EQU
1
JOE EQU
1
GENERATE 18,6
QUEUE
LINE
SEIZE
JOE
DEPART LINE
ADVANCE 16,4
RELEASE JOE
TERMINATE 1
START
25
END
模拟开始控制语句: 开始控制模拟过 程,必须写在整个程序的最前面 定义语句: 定义函数, 实体,变量,开关等 ,应置于模拟程序之前
各类统计表 统计的自由变量
基本模块的分类
1.与活动(流动)实体有关的模块 2.与设施有关的模块 3.与队列有关的模块 4.与存储器有关的模块 5.与逻辑开关有关的模块 6.与统计实体有关的模块
3.6.1 与活动实体有关的模块
1. GENERATE:产生活动实体 2. TERMINATE:活动实体消失 3. ADVANCE:活动实体延时 4. ASSIGN:活动实体参数赋值 5. TRANSFER:活动实体转向
TERMINATE 1
TERMINATE 1
START
1000
END
例3 GENERATE 5
ADVANCE 2
TRANSFER BOTH, NET1, CON1
NET1 SEIZE
1
ADVANCE 12, 9
RELEASE 1
TERMINATE 1
CON1 ADVANCE 2
TRANSFER BOTH, NET2, CON2
GPSS课程设计报告
GPSS课程设计报告书姓名:***学号:******信管C091班一.问题描述为新开张的熟食店合理安排工作人员以解决顾客排队时间过长,排队混乱等问题,达到最大程度满足顾客需求,而且能付出最少成本,使利率达到最大。
问题分析1.店铺有两个柜台,分别收款熟食和新鲜鱼肉,顾客倾向于先去短的队2.店铺有两类顾客:第一类为通常顾客,其中50%只买鱼和肉,50%既买鱼和肉又买熟食,该类顾客从早上9:00到下午5:00到来并服务;第二类顾客为午餐时间顾客,只买熟食,该类顾客到达并服务时间为上午11:00到下午1:303.顾客对等待时间是有要求的。
两种食物都买的顾客期望等待购物时间为15到20分钟,不要超过40分钟;只买鱼和肉的顾客期望等待时间为5分钟以内,不要超过20到25分钟;午餐顾客等待时间为2到3分钟,不能超过10到15分钟;并且店铺能容纳顾客数量不宜超过30.4.每个兼职人员至少安排3个小时工作时间,成本8美元每小时;超过6小时不到8小时的为全职员工,成本为13美元每小时;当兼职人员流动性较高时,至少有4个全职员工来帮助培训新员工;并且所有时间必须有一个全职员工在工作;早上9点上班,晚上5点下班,并且每个柜台必须留一个员工直到6点。
二.问题假设顾客在上午9点到下午5之间陆续到来购买食物,根据自己的需要选择买鱼肉或是买熟食或是两者都卖,每一个窗口进行拿号排队接受服务。
顾客的到达是随机的,但在不同的时间段到达密度有所不同。
现在假设:①.到达各窗口时间间隔呈连续分布;②.顾客在各窗口接受服务的时间呈连续分布;③.顾客接受服务的顺序按进入队列的号码顺序进行(即先到先服务原则);④.食物数量无限,不考虑售空情况出现;⑤.忽略统计数据误差。
为这个服务系统建立GPSS模型,模拟480分钟(8小时)的服务过程,对顾客的到达时间,等待时间,开始服务时间,接受服务时间,离开时间等进行统计,得出其分布规律。
对上步骤得出的结果进行分析,计算各服务窗口所需要的人员数量,计算成本,以最少成本满足最大的顾客需求。
GPS各章节知识点总结
第一章绪论1、GPS的应用:导航、授时、定位测量2、卫星定位经历了三个发展阶段:卫星三角测量、卫星多普勒测量、GPS卫星定位测量卫星三角测量:卫星仅作为一种空间动态观测目标,由地面通过拍摄卫星的位置而测定地面点的坐标。
卫星多普勒测量:利用地面跟踪站上的多普勒测量资料可以精确确定卫星轨道。
定位原理是基于“多普勒效应”3、子午卫星系统:利用多普勒效应进行导航定位,也被称为多普勒定位系统。
(6颗卫星,6个轨道,轨道夹角30,轨道倾角90,卫星高度1075,周期107min)局限性:①一次定位所需时间过长②不是连续的、独立的卫星导航系统③效率低、精度低4、GPS在各个领域的应用:①军事:配备GPS的士兵;导航的导弹;核潜艇;舰载飞弹②交通运输:航运、航空搜索;陆路交通(车辆导航、监控);船舶远洋导航和进港引水③测量:建立和维持全球性的参考框架;板块运动和监测;建立各级国家平面控制网;布设城市控制网、工程测量控制网,进行各种工程测量;在航空摄影测量、地籍测量、海洋测量中的应用。
④其他:精细农业;遥感;卫星定轨;资源勘探;GPS气象学;个人旅游…5、美国政府的GPS政策SPS:标准定位服务,使用C/A码,民用PPS:精密定位服务,可使用P码,军用SA:选择可用性技术;1991.7.1-2000.5.2;人为降低普通用户的测量精度;方法:降低星历精度(加入误差);卫星钟加高频抖动(短周期,快变化)AS:反电子欺骗技术;1994.1.31-今天;P码加密。
P+W→Y6、GPS现代化:①在Block IIR卫星的L2载波上调制C/A码,在Block II F卫星中增加f =1176.45MHz的民用频率;②增强卫星信号强度,增加抗干扰能力;③增设新的军用码(M码),与民用码分开,并具有更好的保密性和抗干扰能力;④使用新技术,以阻止或干扰敌方使用GPS;⑤军用接收机具有更好的保护装置,特别是抗干扰能力,具有快速初始化功能。
gpss课程设计

gpss课程设计一、教学目标本章节的教学目标包括以下三个方面:1.知识目标:学生能够掌握课本中的基本概念、原理和方法,了解相关领域的最新进展。
2.技能目标:学生能够运用所学知识解决实际问题,具备一定的实践操作能力和创新思维。
3.情感态度价值观目标:学生对所学领域产生浓厚的兴趣,培养良好的科学态度和团队合作精神。
二、教学内容本章节的教学内容主要包括以下几个部分:1.教材章节:第1章至第5章,涵盖基本概念、原理和方法等内容。
2.重点内容:每个章节中的关键知识点,如定义、定理、公式等。
3.实际案例:选取与章节内容相关的实际案例,帮助学生更好地理解和应用所学知识。
三、教学方法为了实现教学目标,本章节将采用以下几种教学方法:1.讲授法:教师通过讲解、阐述等方式,引导学生掌握基本概念和原理。
2.讨论法:学生进行小组讨论,促进学生之间的交流与合作,提高解决问题的能力。
3.案例分析法:分析与章节内容相关的实际案例,培养学生运用所学知识解决实际问题的能力。
4.实验法:学生进行实验操作,巩固理论知识,提高实践能力。
四、教学资源为了支持教学内容和教学方法的实施,本章节将准备以下教学资源:1.教材:选用权威、实用的教材,为学生提供可靠的学习资料。
2.参考书:提供相关领域的参考书籍,丰富学生的知识体系。
3.多媒体资料:制作课件、视频等多媒体资料,提高课堂教学效果。
4.实验设备:准备实验所需的设备器材,确保实验教学的顺利进行。
五、教学评估本章节的教学评估将采用以下几种方式:1.平时表现:评估学生在课堂上的参与度、提问回答等情况,以了解学生的学习状态。
2.作业:布置课后作业,评估学生的知识掌握和应用能力。
3.考试:定期进行考试,全面评估学生的知识体系掌握和问题解决能力。
评估方式应客观、公正,能够全面反映学生的学习成果。
教师应及时给予反馈,指导学生改进学习方法,提高学习能力。
六、教学安排本章节的教学安排如下:1.教学进度:按照教材章节顺序进行教学,确保覆盖所有重要内容。
第八章汇编语言高级编程技术PPT课件
1 ??0000: LOOP ??0000
DELAY
000E B9 0AF1 1
MOV CX,2801
0011 E2 FE
1 ??0001: LOOP ??0001
12
四、宏指令中参数的使用
形式参数使宏更通用更灵活,而在宏调 用时给出实参数即可。
宏指令的实参数可以是常数、寄存器、 变量、表达式、操作码或操作码的一部分、 指令或伪指令助记符等,如此多的参数种 类以及参数传递的方便性是子程序所不能 比拟的。
宏指令允许嵌套。
13
例3.定义在两个字型内存变量之间传送数据的宏指令, 并调用之。
MOVE MACRO X,Y ;X→Y
PUSH AX
MOV AX,X
MOV Y,AX
POP AX
ENDM
DATA SEGMENT
VAR1 DW 6543H
VAR2 DW ?
DATA ENDS
MOVE VAR1,VAR2
;宏调用
;宏扩展
1 PUSH AX
1 MOV AX,VAR1
1 MOV VAR2,AX
1 POP AX
14
五、宏指令嵌套
宏指令允许嵌套,嵌套情况有两种: 宏定义体中含有宏调用
遵循先定义后引用的原则,后边的宏定义 可以调用在它之前定义的宏指令
宏定义体中含有宏定义
只有调用了外层宏指令后才能调用内层宏 指令,因为只有调用了外层的宏后,内层 的宏定义才有效。
宏与子程序类似,首先在源程序中定义 一个宏,后面在需要时就可以调用它,并 允许传递多个参数。
正确灵活使用宏,可以缩短源程序的长 度,扩充指令的功能,使源程序更清晰、 简洁,有利于阅读、修改与调试,从而提 高编程效率。
c语言gps课程设计
c语言 gps课程设计一、教学目标本课程的目标是让学生掌握C语言在GPS领域的应用。
通过本课程的学习,学生将能够:1.理解GPS系统的基本原理和工作流程。
2.掌握C语言的基本语法和编程技巧。
3.能够使用C语言进行GPS数据的采集、解析和处理。
4.能够利用C语言实现简单的GPS导航功能。
二、教学内容本课程的教学内容主要包括以下几个部分:1.GPS系统的基本原理和工作流程。
2.C语言的基本语法和编程技巧。
3.GPS数据的采集、解析和处理。
4.GPS导航功能的实现。
三、教学方法为了达到本课程的教学目标,我们将采用多种教学方法,包括:1.讲授法:用于讲解GPS系统的基本原理和工作流程,以及C语言的基本语法和编程技巧。
2.案例分析法:通过分析具体的GPS应用案例,让学生了解GPS技术的实际应用。
3.实验法:通过实验让学生亲手操作,掌握GPS数据的采集、解析和处理方法,以及实现简单的导航功能。
四、教学资源为了支持本课程的教学内容和教学方法的实施,我们将准备以下教学资源:1.教材:选用合适的C语言和GPS相关教材,为学生提供理论学习的参考。
2.参考书:提供相关的参考书籍,拓展学生的知识面。
3.多媒体资料:制作课件和视频资料,直观地展示GPS系统和C语言的相关内容。
4.实验设备:准备GPS接收器、计算机等实验设备,让学生进行实际操作。
五、教学评估为了全面、客观地评估学生在C语言GPS课程中的学习成果,我们将采取以下评估方式:1.平时表现:通过学生在课堂上的参与度、提问回答、小组讨论等表现来评估其学习态度和理解程度。
2.作业:布置与课程内容相关的编程作业,评估学生对C语言编程和GPS应用的掌握情况。
3.考试:定期进行理论知识考试和编程实践考试,全面评估学生的知识掌握和实际应用能力。
4.项目报告:要求学生完成一个GPS相关的编程项目,通过项目报告评估学生的综合应用能力。
六、教学安排本课程的教学安排如下:1.教学进度:按照教材和大纲进行,确保覆盖所有重要知识点。
高精度GPS导航系统设计与实施

高精度GPS导航系统设计与实施随着科技的进步和社会的发展,全球定位系统(GPS)导航已经成为现代化生活中不可或缺的部分。
然而,传统的GPS导航系统存在着定位误差较大的局限性,无法满足精度要求较高的应用领域。
因此,设计和实施一种高精度的GPS导航系统成为一个迫切的需求。
一、设计原理高精度GPS导航系统主要基于改进的信号处理方法和算法来提高定位精度。
其设计原理分为以下几个关键步骤。
首先,采集和处理卫星信号。
GPS导航系统通过接收多颗卫星发出的信号来进行定位。
在高精度GPS导航系统中,需要使用多频率接收机来接收并处理卫星发出的信号。
通过使用多频率接收机,可以减小钟差对测量精度的影响,并提高系统的抗多路径效应的能力。
其次,进行精确钟差校准。
钟差是导致GPS定位误差的一个重要原因。
传统的GPS系统使用星基校准来解决这个问题,但精度有限。
在高精度GPS导航系统中,可以利用局部应用或者传播无线电信号来进行钟差校准。
这种方法可以在同步误差较小的基础上,进一步提高定位的精度。
然后,进行信号跟踪和导航解算。
在高精度GPS导航系统中,需要使用多频率接收机和高精度的时钟来对GPS信号进行跟踪和解算。
通过多频率的接收机可以提高系统对多路径干扰的抑制能力,而高精度的时钟可以减小测量误差。
同时,使用更先进的导航算法可以进一步提高定位精度。
最后,进行误差补偿和定位精度评估。
在高精度GPS导航系统中,需要考虑到各种误差源对定位精度的影响,并采取相应的补偿措施。
常见的误差源包括大气延迟、钟差、多路径效应等。
通过采用误差模型和补偿算法,可以有效减小这些误差对定位精度的影响。
定位精度评估可以通过与参考站进行定位结果对比,或者通过使用地面控制点进行定位验证来实现。
二、实施步骤高精度GPS导航系统的实施过程需要以下几个关键步骤。
首先,进行系统需求分析。
根据实际应用需求,明确高精度GPS导航系统的性能指标和功能需求。
根据需求分析,确定系统的架构和设计方案。
高精度GPS定位系统设计与实现
高精度GPS定位系统设计与实现1.系统介绍高精度GPS定位系统是一种用于精确测量和确定地球上其中一点位置的技术系统。
该系统主要由全球定位系统(GPS)接收器、天线、计算机及相关软件等组成。
通过接收来自卫星的信号,系统可以测量出接收机与卫星之间的距离,从而实现高精度的位置定位。
2.系统设计(1)天线设计:选择合适的天线类型非常重要,因为天线可以影响系统的接收灵敏度和方向性。
一般来说,使用高增益、低噪声的天线可以提高系统的接收灵敏度,从而减小定位误差。
(2)接收机设计:接收机主要用于接收和解码来自卫星的信号,并将信号传输给计算机进行处理。
接收机应该具备高灵敏度的前端放大器和频率可调谐的中频放大器,以提高信号的接收质量。
(3)计算机与软件设计:计算机负责接收、处理和显示定位信息。
系统应具备高性能的计算机和相应的软件,以实现高精度的数据处理和分析。
3.系统实现(1)卫星信号接收与解码:接收机通过天线接收来自卫星的信号,然后使用解码算法将信号转换成数字信号。
通过解码可以得到卫星的编号、位置信息、时间标记等数据。
(2)距离测量:接收机根据卫星信号的传输时间和信号传输速度计算出接收机与卫星之间的距离。
由于信号传输速度为光速,可以得到非常精确的距离信息。
(3)位置计算:系统通过测量接收机与多颗卫星之间的距离,并结合卫星的位置信息,采用三角法等方法计算出接收机的具体位置坐标。
位置计算是系统的核心部分,其精度直接影响定位结果的精度。
(4)误差补偿:由于系统中存在多种误差源,如钟差误差、大气层延迟误差等,需要对这些误差进行补偿,以提高定位结果的精度。
误差补偿可以通过一系列的算法和模型来实现。
(5)结果显示:最后,通过计算机和相应的软件将计算得到的位置坐标以图形化的方式显示出来,同时还可以显示相关的定位信息,如定位精度、速度等。
4.应用领域高精度GPS定位系统广泛应用于航空航天、地理测量、导航、军事等领域。
在航空航天领域,高精度的定位信息对于导航、飞行控制等非常重要;在地理测量领域,可以通过高精度GPS定位系统来进行地图绘制、地形测量等工作;在导航领域,可以为车辆、船舶等提供实时导航服务;在军事领域,可用于导弹制导、坦克定位、军事测绘等。
gps课课程设计书
gps课课程设计书一、教学目标本章节的教学目标旨在让学生掌握GPS技术的基本原理和应用方法,培养学生的实践操作能力和创新思维。
具体包括以下三个方面的目标:1.知识目标:通过本章节的学习,学生能够了解GPS技术的基本概念、工作原理和系统组成,掌握GPS定位的基本方法和技巧。
2.技能目标:学生能够运用GPS设备进行实际定位和导航操作,具备分析处理GPS数据的能力,并能运用GPS技术解决实际问题。
3.情感态度价值观目标:培养学生对科技创新的兴趣和好奇心,增强学生对地理信息技术的认识,提高学生运用科技手段解决实际问题的意识。
二、教学内容本章节的教学内容主要包括以下几个部分:1.GPS技术的基本原理:介绍GPS系统的工作原理、卫星信号的传播和接收、坐标系统等基本知识。
2.GPS定位方法:讲解静态定位和动态定位的方法,以及GPS测量误差分析和数据处理技巧。
3.GPS设备的使用:介绍GPS设备的选购、使用和维护方法,以及常见GPS软件的功能和操作方法。
4.GPS应用案例:分析GPS技术在地理测绘、交通运输、户外运动等领域的具体应用。
三、教学方法为了提高教学效果,本章节将采用以下几种教学方法:1.讲授法:讲解GPS技术的基本原理、定位方法和应用案例,使学生掌握相关理论知识。
2.讨论法:学生分组讨论,分享GPS设备的使用心得和实际应用经验。
3.案例分析法:分析具体GPS应用案例,引导学生学会运用GPS技术解决实际问题。
4.实验法:安排学生进行GPS定位实验,提高学生的实践操作能力和动手能力。
四、教学资源为了支持本章节的教学,我们将准备以下教学资源:1.教材:选用权威、实用的GPS技术教材,为学生提供系统、全面的学习资料。
2.参考书:推荐学生阅读一些关于GPS技术的专业书籍,拓展学生的知识视野。
3.多媒体资料:制作课件、演示视频等多媒体资料,生动形象地展示GPS技术的相关内容。
4.实验设备:准备GPS定位设备、测量仪器等实验器材,为学生提供实践操作的机会。
gpss课程设计

gpss课程设计一、课程目标知识目标:1. 让学生掌握GPS的基本概念,了解其工作原理和应用领域。
2. 使学生能够运用GPS技术进行定位和导航,并了解GPS信号的组成及特点。
3. 引导学生了解我国北斗导航系统的发展及其在各个领域的应用。
技能目标:1. 培养学生使用GPS设备进行实际操作的能力,提高解决问题的实践技能。
2. 培养学生通过分析GPS数据,解决地理、交通等领域问题的能力。
3. 提高学生的团队协作能力和创新思维能力,通过小组讨论、实践操作等方式,提高学生的沟通能力。
情感态度价值观目标:1. 培养学生对GPS技术的兴趣,激发学生探索科学技术的热情。
2. 增强学生的国家意识,认识到我国在卫星导航领域的重要地位和贡献。
3. 引导学生关注GPS技术在生活中的应用,提高学生运用科技改善生活、服务社会的责任感。
本课程旨在结合学生年级特点和知识深度,通过理论讲解和实践操作相结合的方式,使学生在掌握GPS基本知识的基础上,提高实践技能和创新能力。
同时,注重培养学生的国家意识和科技素养,使学生在学习过程中形成正确的价值观。
在教学过程中,将课程目标分解为具体的学习成果,便于教学设计和评估的实施。
二、教学内容1. GPS基本概念:介绍全球定位系统(GPS)的定义、发展历程及其在现代社会中的应用。
教材章节:第一章 导航卫星系统概述2. GPS工作原理:讲解GPS系统的构成,包括卫星、地面控制站和用户接收机,以及定位原理。
教材章节:第二章 GPS系统的工作原理3. GPS信号组成及特点:分析GPS信号的组成,包括载波、伪随机码和导航电文,以及信号的特点。
教材章节:第三章 GPS信号的构成与特点4. 实际操作:指导学生使用GPS设备进行定位和导航操作,分析实践过程中遇到的问题及解决方法。
教材章节:第四章 GPS设备的操作与应用5. 北斗导航系统:介绍我国北斗导航系统的发展历程、现状及在各个领域的应用。
教材章节:第五章 北斗导航系统及其应用6. GPS技术在生活中的应用:分析GPS技术在地理、交通、旅游等领域的实际应用,提高学生的实际应用能力。
高精度GPS导航系统设计与实现
高精度GPS导航系统设计与实现摘要:高精度GPS导航系统在现代社会中扮演着重要的角色,其在交通、安全、军事等领域的应用日益广泛。
本文将介绍高精度GPS导航系统的设计与实现,包括原理概述、信号处理、定位算法和应用实例,以期提供一个全面的理解和指导。
1. 引言全球定位系统(GPS)是一种基于卫星的导航系统,通过无线电波传输卫星发出的信号,接收设备可以计算出自身的地理位置和时间。
高精度GPS导航系统基于原始的GPS技术,通过改进信号处理和定位算法,能够提供更精确、更可靠的定位和导航服务。
2. 原理概述高精度GPS导航系统的原理基本上与传统GPS相同,但在信号处理和定位算法上有所改进。
首先,高精度GPS接收设备通过多普勒效应来估计信号的频率误差,从而提高信号的精确性。
其次,增强型GPS接收设备利用多个接收天线和自适应信号加强技术,抑制多径干扰和噪声,提高信号的可靠性和鲁棒性。
3. 信号处理高精度GPS导航系统的信号处理主要包括信号捕获、跟踪、解调和估计。
首先,信号捕获是指接收设备从卫星信号中提取出导航信息的过程,通常使用FFT算法来分析信号频谱。
其次,跟踪是指接收设备跟踪卫星信号的过程,采用相干积累技术来提高信噪比。
然后,解调是指将接收到的信号转换为导航数据的过程,通过基带处理和解算解决信号模拟到数字的转换。
最后,估计是指根据接收到的多个卫星信号估计出自身位置和时间的过程,采用最小二乘法或Kalman滤波器等技术来优化定位精度。
4. 定位算法高精度GPS导航系统的定位算法主要包括全球位置解算(PVT)和差分GPS(DGPS)。
首先,PVT算法是指通过接收到的卫星信号计算出接收器的位置、速度和时间的算法,包括三角测量、伪距差分和载波相位观测等方法。
其次,DGPS算法是指在基准站已知位置的情况下,通过与基准站的差分校正来提高定位精度的算法,包括实时差分(RTK)和后处理差分等技术。
5. 应用实例高精度GPS导航系统在交通、安全、农业和军事等领域有着广泛的应用。
GPSS语言

GPSS语言GPSS(Geneal Purpose Simulation System)是使用比较广泛的面向离散模型的模拟语言。
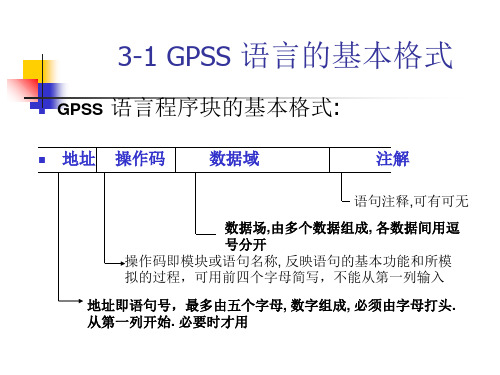
该语言特别适用于处理出现等待行列的系统,它提供了多种形式的实体、块语句、定义语句、控制语句、模拟操作语句等等,可以实现高难度的程序设计。
“GPSS的全部目的就是为了预测现实世界中复杂系统的行为——过去许多代价高昂的项目之所以失败是因为对最终的结果缺乏精确的预见。
” GPSS的研制者在介绍GPSS时如是说。
下面先从一个简单的例子出发,对GPSS的建模过程进行一个总体概略的介绍。
随后将详细介绍GPSS的运行环境、界面和模块体系结构,并对GPSS的建模观点进行评述,最后再以一个研究示例说明GPSS在实际研究中的应用。
一、一个简单的GPSS例子假设顾客去理发店理发。
店里只有一个理发员JOE,顾客排队等着,前一个理完发,后一个就可以去理。
设顾客平均18分钟来一个,不过有士6分钟的偏差,也就是说在12分钟到24分钟之内,即12,13,…,24分钟都等可能有顾客到来。
理发员理发时间是16土4分钟,下面是模拟系统的运行情况。
SIMULA TEGENERA TE 18,6 顾客在(18f6)分钟的时间间隔到来QUEUE LINE 顾客排入名为LINE的队中SEIZE JOE 或JOE闲,找他理发,否则停在队中DEPART LINE 离队ADV ANCE 16,4 理发花了(16±4)分钟RELEASE JOE 理发完毕离开TERMINA TE 顾客离开系统START 25END首先,在每个GPSS程序的开始,有一个控制语句:S[MU-LA TE。
它表示一个模拟过程的开始,同样,在整个程序的最后,有一个END控制语句,与SIMULA TE相对应,表示模拟过程的结束。
这个进程说明从GENERA TE所产生的顾客进入理发店,找JOE理发,理完后离开理发店。
JOE开始时是闲的。
有人找J(3E理发,如果他是闲的,他就为顾客理发;如果他是忙的,就让顾客排人LINE中。
第8章 高级 GPSS 程序设计(上)

例:
TABULATE
2
TABULATE
P$3, 10
JLQV1.0
管理系统模拟与GPSS语言
8 - 1 高级 GPSS 模块 5
3. QTABLE 排队等待时间分布表定义
QTABLE 是用来定义排队等待时间分布表的。其格式 与 TABLE 模块相似:
表号 QTABLE A, B, C, D
其中: A B C D
8.1.2 表的统计与输出举例 8
表输出中
复均值 MULTIPLE OF MEAN = UPPER LIMIT / MEAN
如: 0.12 = 600 / 4933
均值方差 DEVIATION FROM MEAN = (UPPERLIMIT - MEAN) / ST. DEV.
如: -1.51 = ( 600 - 4933 ) / 2869
900,60 2,FN$2 1,FN$3 10,2
2-,1 1,NEXT BUS Q$LINE,0 W$GETON,0 2 1,0 BUS 1
START
25
END
汽车到达 起初车内顾客数 下车人数,做循环计数 乘客下车过程
开门上车 已无人排队 已无人上车 统计2号表 统计器再次置零 关门 离开
JLQV1.0
JLQV1.0
管理系统模拟与GPSS语言
8.1.2 表的统计与输出举例 15
因人多而没上车的人员分布统计表
ENTRIES IN TABLE MEAN ARGUMENT
25
19.28
STANDARD DEVIATION 20.63
SUM OF ARGUMENTS 482.0
UPPER OBSERVED PER CENT
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.889,12/.933,15/.977,20/.993,25/.998,30/.999,40/1,50
1
VARIBLE
80*FN$2+620
装车时间
2
VARIBLE
85*FN$3+2500 卡车载重量
3
VARIBLE
65*FN$4+400
重车运行时间
4
VARIBLE 40*FN$5+350 空车运行时间
JLQV1.0
管理系统模拟与GPSS语言
11
8.3 利用管理系统模拟模型进行最优化分析
例8.9 设备的故障及其处理
下面是 例8.8 经过修改的程序,为了节省篇幅, 我们将随机函数部分略去。程序后部增加的部分就 是故障处理程序块。逻辑开关取名LOAD,在程序 的前部对逻辑开关进行了初始设置,并且在卡车排 队后进行装载机是否工作的测试,如果正常工作则 卡车可进行装载,否则将等候在队列中直至检修完 毕。
,,,5 LOAD LOAD LOAD 1,V$1 P$1,0,LOOP1 P$1 LOAD 1+,1 2,V$3 P$2,0,LOOP2 3+,P$2 P$2 UNLOD UNLOD UNLOD 580,FN$1 UNLOD
产生卡车数目 装车过程
装车时间 装车 累计装车数 重车运行时间
重车运行 卸车过程
JLQV1.0
管理系统模拟与GPSS语言
7
SIMULATE
LOAD EQU 1
UNLOD EQU 2
1
FUNCTION
RN$1,C24
指数分布函数
0,0/.1,.104/.2,.222/.3,.355/.4,.509/.5,.69/.6,.915/.7,1.2/.75,1.38
.8,1.6/.84,1.83/.88,2.12/.9,2.3/.92,2.52/.94,2.81/.95,2.99/.96,3.2
JLQV1.0
管理系统模拟与GPSS语言
2 8.2 一具有八条线路的电话交换台的模拟
表 8.2 例 8.7 系统模型的基本组成
JLQV1.0
管理系统模拟与GPSS语言
3 8.2 一具有八条线路的电话交换台的模拟
SIMULATE RMULT
54321, 2345, 3456
1
FUNCTION
RN$1,C24
2
FUNCTION
RN$2,C24
正态分布函数
0,-40/.001,-30/.006,-25/.022,-20/.066,-15/.115,-12
.158,-10/.211,-8/.274,-6/.344,-4/.420,-2/.500,0
.579,2/.655,4/.725,6/.788,8/.841,10/.889,12/.933,15
.889,12/.933,15/.977,20/.993,25/.998,30/.999,40/1,50
(略)
5
FUNCTION
RN$5,C24
正态分布函数
0,-40/.001,-30/.006,-25/.022,-20/.066,-15/.115,-12/.158,-10/.211,-8
.274,-6/.344,-4/.420,-2/.500,0/.579,2/.655,4/.725,6/.788,8/.841,10
指数分布函数
0,0/.1,.104/.2,.222/.3,.355/.4,.509/.5,.69/.6,.915/.7,1.2/.75,1.38
.8,1.6/.84,1.83/.88,2.12/.9,2.3/.92,2.52/.94,2.81/.95,2.99/.96,3.2
.97,3.5/.98,3.9/.99,4.6/.995,5.3/.998,6.2/.999,7/.9998,8
DEPART
UNLOD
ADVANCE
580,FN$1
卸车
RELEASE
UNLOD
LOOP3 ASSIGN
3,V$2
运货量
TEST_G
P$3,0,LOOP3
SAVEVALUE
2+,P$3
运货量累计
LOOP4 ASSIGN
4,V$4
空车运行时间
TEST_G
P$4,0,LOOP4
SAVEVALUE
4+,P$4
ADVANCE
P$4
空车运行
TRANSFER
,BACK
返回装车地
GENERATE
300000,30000,250000
LOGIC_R
LOAD
ADVANCE
720,180
LOGIC_S
LOAD
TERMINITE(结尾略)
产生故障事件 关闭装载机 检修装载机 开通装载机
JLQV1.0
管理系统模拟与GPSS语言
BACK SEIZE LOOP1
GENERATE QUEUE GATE_LS
LOAD DEPART ASSIGN TEST_G ADVANCE RELEASE SAVEVALUE
,,,5 LOAD LOAD
LOAD 1,V$1 P$1,0,LOOP1 P$1 LOAD 1+,1
12
装载机开关初始化
装车时间 卡车载重量 重车运行时间 空车运行时间
JLQV1.0
管理系统模拟与GPSS语言
8
8.3 利用管理系统模拟模型进行最优化分析
BACK LOOP1
LOOP2
GENERATE QUEUE SEIZE DEPART ASSIGN TEST_G ADVANCE RELEASE SAVEVALUE ASSIGN TEST_G SAVEVALUE ADVANCE QUEUE SEIZE DEPART ADVANCE RELEASE
4
打来咨询电话 打电话人的总数 记录拨打次数 测试是否有闲置电话 开始通话 通话时间 通话结束 测试是否是第一次拨打 第一次拨号即打通的电话数
等待 10 分钟 重新拨打 没有打通电话的人数
36000 1 1
模拟10小时
JLQV1.0
管理系统模拟与GPSS语言
5
8.3 利用管理系统模拟模型进行最优化分析
空车运 行时间 130920 233690 302510 338030 361010 370730 374380 374450 375510 375510
装车等 待时间 0.00 207.78 573.13 1050.13 1662.22 2379.34 3182.88 4024.24 4873.10 5736.98
36000 1 20
运货量
运货量累计 空车运行时间
空车运行 返回装车地
JLQV1.0
管理系统模拟与GPSS语言
10
8.3 利用管理系统模拟模型进行最优化分析
表 8.4 一原材料运输系统的模拟模型模拟结果
卡车 数 1 2 3 4 5 6 7 8 9 10
装车 时间 884.32 884.15 882.87 877.74 877.97 879.64 882.39 885.03 885.67 886.35
卸车等 待时间 0.00 99.46 213.50 328.23 397.54 462.87 499.21 522.12 533.73 541.13
卡车 利用率
1.000 0.999 0.998 0.998 0.997 0.996 0.995 0.995 0.994 0.993
装车机 利用率 0.35 0.62 0.80 0.90 0.95 0.98 0.99 1.00 1.00 1.00
卸车 时间 539.61 551.64 550.36 556.40 554.94 551.07 549.42 550.36 550.60 549.95
重车运 行时间 183800 328730 412555 472360 506695 517285 520650 522695 523290 523290
.977,20/.993,25/.998,30/.999,40/1,50
1
STORAGE
1
VARIBLE
8 30*FN$2+1200
JLQV1.0
管理系统模拟与GPSS语言
DIAL
DONE REDI CON
GENERATE SAVEVALUE ASSIGN TEST_L ENTER ADVANCE LEAVE TEST_E SAVEVALUE
.97,3.5/.98,3.9/.99,4.6/.995,5.3/.998,6.2/.999,7/.9998,8
2
FUNCTION
RN$2,C24
正态分布函数
0,-40/.001,-30/.006,-25/.022,-20/.066,-15/.115,-12/.158,-10/.211,-8
.274,-6/.344,-4/.420,-2/.500,0/.579,2/.655,4/.725,6/.788,8/.841,10
14
8.3 利用管理系统模拟模型进行最优化分析
例 8.10 一机械加工中心的模拟分析
系统概况: 一机械加工中心有若干名技工和若干台同样的机器, 每台机器需二 位技工来操作。 当一件工作到达时, 先由一位职员进行记录工作, 然后将工 作交给一位技工进行准备工具等工作, 当加工工作开始时, 第二名技工过来帮 助操作机器。 在工作完成之前, 职员应完成记录及收款的工作。 车间每天八 小时工作, 但只在前七小时收活, 最后一小时只完成已收下的活。 系统其它 参数和数据如下:
TERMINATE ADVANCE TRANSFER SAVEVALUE
TERMINATE
GENERATE