北航自动化三系305(即导航方向)外推复试
北航自动化三系305(即导航方向)外推复试

补充版:北航复试注重计控,数电,计控方面的只是,还有很杂的东西都有,比如概率论,模电,但那不是重点,要是不会的话就直接跟老师说自己忘了,但是其它科目得学得好。
面试时把老师往自己会的方向引就好。
当然要好好准备了以下是自己在复习时总结的东西,有一些是往届复试题,答案瞎写的,仅供参考。
I、笔试3、填空题:在微分方程、传递函数、状态空间方程三种形式下,二阶系统的固有频率分别由什么量给出。
A.微分方程系数(sqrt(a2/a0));B.wn;C.特征值(sqrt(入1*入2))。
4、给了一个弹簧振子的图,根据条件写出微分方程。
这个应该会5、给了一个系统的电路图,让你补全负反馈部分的电路,并且画出系统的框图。
真心不好,电路原理很重要!!!!!!!!!6、PID控制的特点是什么?比例、积分、微分对系统分别有什么影响?PID特点是结构简单,稳定性好,工作可靠,调整方便。
比例系数Kp对系统性能的影响:稳定情况下,Kp增加,稳态误差减小,系统响应速度加快,但如果Kp偏大,调节时间加长,甚至不稳定;积分控制能消除系统静差,但如果积分作用太强,系统将不稳定;微分能预测误差变化趋势,选择合适的微分作用能减小系统超调,缩短调节时间,允许加大比例控制,但微分作用过大或过小都会适得其反。
7、保持器的作用是什么?在被控对象前加一个保持器充当滤波器的作用,可以再现主频谱分量而除掉附加的高频谱分量,把数字信号无失真的恢复成连续信号。
8、离散系统的稳定条件是什么?闭环脉冲传递函数的全部极点位于z平面上以原点为圆心的单位圆内。
9、连续系统的稳定条件是什么?闭环传递函数的全部极点位于s平面的左半平面。
10、在阶跃输入下,为了研究被控对象,应记录响应的“过渡过程曲线”还是“稳定之后的曲线”?如果是正弦输入呢?在阶跃输入下,应记录“过渡过程曲线”,正弦输入下,应记录“稳定之后的曲线”。
因为一般情况阶跃输入下是在时域下研究被控对象,而正弦输入一般是在复频域研究。
北航 3系 双控考研复试总结

看了很多帖子,感觉对双控的总结都不怎么靠谱。
因此本屌觉得很有必要写一下今年(12年)三系双控复试的情况,让以后报考的同学们少走些弯路,少经历些我原来因为看到各种不靠谱消息所产生的惶恐。
双控今年招收13个学术硕士(专硕我不清楚),比往年削减了很多,而且今年考分很高,竞争异常激烈。
复试前曾经收到短信,建议390以下的同学调剂到别的方向。
鉴于此情况,系里可能动了侧影之心,给我们又增加了一个专硕名额,也只是这一个而已。
最终来参加复试的共有34人,其中强军计划的有2人,不占以上14个名额(13学+1专)。
400分及以上的有14人,390分及以上(包括400以上)的有24人(此处可见本论坛的投票十分不靠谱)。
最终录取结果大致如下:初试排名第二425分的同学不幸被调剂专硕,另有几个400以上直接被刷。
录取的初试最低分不详,我预计不低于390(该预计不靠谱,欢迎拍砖),可见初试分还是很重要的(原先听说复试满分也是500,最后录取是看初试+复试满分1000分的得分,让我以为初始分高点根本没优势,现在看来,初试分参考价值还是比较大)。
复试共分为笔试和面试。
面试又细分为理论、工程、英语三个组。
笔试满分150分,本屌认为十分难,本来考前愁笔试愁的肠子都快断了,后来一看考题,顿时释然了,因为这个难度和题量,本屌认为大家肯定也都半斤八两。
考完之后众屌丝聚在一起分析也都认为笔试应该只是个参考。
但是不能因此就说不重视笔试,你要是能做上其他人做不出的题,你也有优势嘛不是!笔试具体考题本屌实在记不起来,但是考的科目可以说说:概率(3道)、静力学(2道还是3道记不太清了)、自控(3道)、单片机应用连线题一道、C语言编程一道(我们考的是编一个万年历,已知2008年1月1日是星期X,要求这个函数能完成以下功能:输入年月日,输出这天是星期几)、设计题一道(要求不高,给出大致框架即可)、汉译英1段(个人认为超难)、英译汉2段(比汉译英容易多了),还有一道题(在卷子上是第二大题),由于本屌丝智商趋近窝狗,不知道到底考的是什么,就我理解可能是考平面几何,初中的内容。
北京航空航天大学考研复试分数线及要求

北京航空航天大学考研复试分数线及要求北京航空航天大学20XX年考研复试基本分数线及要求报考学科门类(专业)总分基本要求政治/外国语业务课1/业务课2备注哲学[01]3305075经济学[02]3605580法学[03]3405585教育学[04]3305580文学[05]3355585理学[07]数学[0701]3405075物理[0702] 化学[0703]3105075工学[08]控制[0811] 计算机[0812]3404568通信[0810] 材料[0805]3304568仪器[0804]3204568机械[0802] 电子[0809] 电气[0808]3154568光学[0803] 环境[0830] 土木[0814] 化工[0817] 交通[0823] 生物[0831]3054568力学[0801] 航空宇[0825] 动热[0807] 船海[0824] 武器[0826]2954568照顾学科管理学[12]( 不含[120280])[1201] [1202] [1204]3355580软件工程硕士[081280]3104568工商管理硕士[MBA][120280]2 门联考总分不低于175 ,单科不低于55 ,综合不低于110 。
工作10 年以上的'考生,联考总分降5 分,其它条件不降。
双少考生(A 类考生)总分降10 分,单科不降分。
西部考生定向或委托(B 类考生)总分降5 分,单科不降分。
A类考生:工作单位在国务院公布的民族自治地方,即5个自治区、30个自治州、119个自治县(旗),并定向或委托培养回原单位的少数民族在职人员考生。
*B类考生:工作单位在内蒙(15)、贵州(52)、云南(53)、西藏(54)、甘肃(62)、青海(63)、宁夏(64)、新疆(65)、广西(45)九省(区),或重庆(50)、四川(51)、陕西(61)三省(市),且定向或委托培养回原单位的在职考生。
北航机械工程及其自动化学院考研复试分数线复试名单
北航机械工程及其自动化学院考研复试分数线复试名单一、机械学院各学科复试资格基本线(上线学生自动获得复试资格,不再单独通知)一级学科代码一级学科名称二级学科代码二级学科名称总分政治理论外国语业务课一业务课二0802机械工程080200机械工程320505075750805材料科学与工程080503材料加工工程320505075750825航空宇航科学与技术082503航空宇航制造工程31050507575085201机械工程(专业学位)31050507575另:参加强军计划的考生若满足我校制定的复试资格基本线,也需参加本次复试。
二、各研究方向复试时间、地点二级学科研究方向研究方向代码复试分数线专业对应系所单位笔试时间笔试地点面试时间面试地点机械工程08020001先进制造工艺及微细加工技术02先进制造装备与数控技术01、02320北航考研复试,机械制造及自动化系3月23日上午8:00—9:00新主楼F2133月23日上午9:15开始新主楼A40203计算机测控、机电一体化、嵌入式系统及无损检测技术03机电工程系3月23日上午8:00—9:00新主楼B5063月23日上午9:30开始新主楼A41204机器人技术04机器人研究所3月23日上午8:00—9:00新主楼D2183月23日上午9:15开始新主楼A31205机械系统设计理论、CAD/CAE及控制技术05机械设计及自动化系3月22日上午8:00-9:00新主楼B5063月22日上午9:15开始新主楼A50706计算机图形学06工业设计系3月23日上午8:00-9:00新主楼A5093月23日上午9:15开始新主楼A50907计算机辅助设计与制造08信息系统与企业信息化07、08工业与系统工程系3月25日上午8:00—9:00新主楼B5063月25日上午9:15开始新主楼A517二级学科研究方向研究方向代码复试分数线专业对应系所单位笔试时间笔试地点面试时间面试地点材料加工工程08050301先进材料成型与焊接技术02新型电源、焊接装备及自动化技术01、02320材料加工工程系3月22日上午8:00—9:00新主楼F2133月22日上午9:15新主楼B215航空宇航制造工程08250301航空产品数字化设计制造一体化技术02精密塑性成形与装备技术03现代飞机制造工艺与自动化装配技术北航考研复试,01、02、03310航空宇航制造工程系3月25日上午8:00—9:00新主楼B4023月25日上午9:15开始新主楼D422【调剂】船舶与海洋结构物设计制造08240101船舶与海洋结构物设计制造01一志愿上本院线船舶专业3月23日下午2:00—3:00新主楼B2113月23日下午3:15新主楼B211【调剂】设计学08720001工业设计01一志愿上本院线工业设计系3月23日下午2:00-3:00新主楼A5093月23日下午3:15开始新主楼A509机械工程(专业学位)085201(一级学科)01机械工程01310资格审查时递交研究方向申请表与机械工程北航考研复试,(080200)各研究方向对应的系所单位的复试时间地点相同02材料加工工程02材料加工工程系3月22日上午8:00—9:00新主楼F2133月22日上午9:15新主楼B21503航空宇航工程03航空宇航制造工程系3月25日上午8:00—9:00新主楼B4023月25日上午9:15开始新主楼D422三、资格审查时间、地点及所需材料(所有参加复试的学生均需按时间进行资格审查,复试前没有进行资格审查的视为放弃复试资格)1、资格审查时间、地点1)3月22日复试的考生请于3月20日下午(2:00——5:00)到北航新主楼A841办理资格审查手续;2)3月23日复试的考生请于3月21日(上午8:30——下午4:00)到北航新主楼A841办理资格审查手续;3)3月25复试的考生请于3月24(上午9:00——11:00)到北航新主楼A841办理资格审查手续。
北京航空航天大学保研—北航机械工程及自动化学院保研(推荐免试)接收外校推免研究生的相关规定
北京航空航天大学保研—北航机械工程及自动化学院保研(推荐免试)接收外校推免研究生的相关规定一、北航机械工程及自动化学院保研(推荐免试)申请条件1.热爱祖国,热爱共产党,身心健康,遵纪守法,品行端正;2.具有推荐免试资格的高校优秀应届本科毕业生。
其中,申请推免直接攻读博士学位或学术型硕士研究生的学生,必须已取得本科就读学校给予的学术型推免生资格;3.申请推免直接攻读博士学位研究生的学生,本科所在学校若为研究生院高校,一般要求成绩排名在前10%;本科所在学校若为211学校(不含研究生院高校),一般要求成绩排名在前5%。
申请攻读硕士学位研究生的学生,本科所在学校若为研究生院高校,一般要求本科前三学年成绩在学院本专业年级排名前25%;本科所在学校若为211高校(不含研究生院高校),一般要求本科前三学年成绩在学院本专业年级排名前10%。
对于特别优秀和具有发展潜力的学生,该要求可以适当放宽;4.身体健康状况符合《普通高等学校招生体检工作指导意见》要求。
二、北航机械工程及自动化学院保研(推荐免试)申请者需提供的材料1.完整、真实填写《北京航空航天大学接收推荐免试攻读2014年研究生申请表》(见附件一)一式两份;2.对申请有参考价值的本人自述(限1000字以内)一份;3.提交加盖所在学校教务处公章的本人历年在校学习成绩单一份;4.若有本人具有代表性的学术论文、出版物或科技成果,请提交复印件一份;5.若有本人在学期间学科竞赛、科技活动或其它获奖的证明,请提交复印件一份;6.身份证的正反面复印件1份,正反面需复印在A4纸的同一页面上;7.提交由二级甲等以上(含二级甲等)医疗机构出具的体格检查表(样式见附件二)。
三、北航机械工程及自动化学院保研(推荐免试)申请办法1.申请者请到北航研究生招生信息网http://yzb.buaa.edu.cn/查阅相关说明及要求,下载申请表(见附件一),按照学校及申请学院要求的时间节点将全部申请材料(统一用A4纸)寄(或送)达所申请学院的研究生教务办公室;2.经申请学院招生领导小组对申请人各项材料(含体格检查表)综合评审后,通知学生并组织复试,学生需交纳复试费100元/人。
2018北京航空航天大学电气工程考研复试通知复试时间复试分数线复试经验

2018北京航空航天大学电气工程考研复试通知复试时间复试分数线复试经验启道考研网快讯:2018年考研复试即将开始,启道教育小编根据根据考生需要,整理2017年北京航空航天大学自动化科学与电气工程学院080800电气工程考研复试细则,仅供参考:一、复试科目(启道考研复试辅导班)二、复试通知(启道考研复试辅导班)为了做好2017年硕士研究生招生复试工作,确保研究生源质量,根据国家教育部、北航研究生院硕士研究生招生的有关精神和工作要求,坚持德智体全面衡量、择优录取、确保质量、宁缺勿滥的原则,贯彻硕士研究生招生复试工作公开化、规范化和制度化,研究生录取真正做到公平、公正、公开,择优录取,自动化科学与电气工程学院进一步规范2017年硕士研究生复试的内容及方式:一.总原则1)研究生复试保证做到公平、公正、公开。
2)各类考生均采用差额复试方式,差额比例一般不低于120%,参加复试的考生部分不能被录取。
3)被拟录取的考生采用指导教师与考生双向选择的原则确定考生最终能否被录取。
4)自动化科学与电气工程学院不接收外校及院外专业调剂考生。
二.组织结构自动化科学与电气工程学院硕士研究生复试领导小组由以下成员组成:组长:焦宗夏副组长:胡晓光、陶飞、王艳东成员:王少萍、胡庆雷、段海滨、郝飞、于劲松、杨丽曼、肖春燕、郑征、袁海斌、李妮秘书:陈晓磊三.复试资格及对象1)经学院招生领导小组和学院党政联席会共同商议决定,第一志愿报考我院系相应专业,并且单科成绩符合外国语40分,政治40分,数学70分,专业课70分,总分分数线为:081100控制科学与工程(学术型硕士)350分;080200机械工程(学术型硕士)310分;080800电气工程(学术型硕士)345分;085210控制工程(全日制专业学位硕士)360分。
根据学校下达给学院的招生计划,今年报考我院的全国统考生,我院学术型硕士拟录取78人,全日制专业学位硕士拟录取65人。
2)符合学校复试基本线的强军计划考生,拟录取4人。
北航自动化科学与电气工程学院双控复试要点

北京航空航天大学自动化科学与电气工程学院双控专业复试内容提要
笔试:
1.考研数学,常微分方程,微积分,齐次方程组求解,或者概率题等较为基础的数学计算。
2.数学建模题,根据日常生活中遇到的数学问题,建立数学模型,列公式求解。
3.理论力学,静力学或者动力学,考察力学基本原理和公式。
4.C语言编程题,编写程序实现特定的功能。
5.创新应用题,综合应用学过的知识如电路,微机原理等设计或者解决生活中的问题,要求给出设计思路和原理,预测结果。
6.单片机或微机原理,常用的芯片功能和引脚要熟悉,可设计电路实现简单功能。
7.专业英语考察,英译汉,汉译英。
面试:
1.专业基础组面试,现场随机抽取三道专业题,范围涵盖考研数学,静力学,动力学,
自控原理,现控原理等,现场在黑板上作答。
2.专业英语组面试,由面试老师指定一段科技英语,读完一遍之后口译。
读错或口译
错一处减一分。
3.专业实践组面试,在场面试老师随机发问,一般会考察专业知识在实际中的应用和
设计。
如什么是滤波器,如何设计一个稳定的控制器实现特定的控制作用,PID控制器的原理等专业问题,以及手机屏幕会随姿态变横屏或者竖屏是什么原理,如何计算一栋楼的高度等设计应用题。
以上只是个人经验~~祝学弟学妹们金榜题名!。
北航自动化三系305(即导航方向)外推复试教学内容
北航自动化三系305(即导航方向)外推复试补充版:北航复试注重计控,数电,计控方面的只是,还有很杂的东西都有,比如概率论,模电,但那不是重点,要是不会的话就直接跟老师说自己忘了,但是其它科目得学得好。
面试时把老师往自己会的方向引就好。
当然要好好准备了以下是自己在复习时总结的东西,有一些是往届复试题,答案瞎写的,仅供参考。
I、笔试3、填空题:在微分方程、传递函数、状态空间方程三种形式下,二阶系统的固有频率分别由什么量给出。
A.微分方程系数(sqrt(a2/a0));B.wn;C.特征值(sqrt(入1*入2))。
4、给了一个弹簧振子的图,根据条件写出微分方程。
这个应该会5、给了一个系统的电路图,让你补全负反馈部分的电路,并且画出系统的框图。
真心不好,电路原理很重要!!!!!!!!!6、PID控制的特点是什么?比例、积分、微分对系统分别有什么影响?PID特点是结构简单,稳定性好,工作可靠,调整方便。
比例系数Kp对系统性能的影响:稳定情况下,Kp增加,稳态误差减小,系统响应速度加快,但如果Kp偏大,调节时间加长,甚至不稳定;积分控制能消除系统静差,但如果积分作用太强,系统将不稳定;微分能预测误差变化趋势,选择合适的微分作用能减小系统超调,缩短调节时间,允许加大比例控制,但微分作用过大或过小都会适得其反。
7、保持器的作用是什么?在被控对象前加一个保持器充当滤波器的作用,可以再现主频谱分量而除掉附加的高频谱分量,把数字信号无失真的恢复成连续信号。
8、离散系统的稳定条件是什么?闭环脉冲传递函数的全部极点位于z平面上以原点为圆心的单位圆内。
9、连续系统的稳定条件是什么?闭环传递函数的全部极点位于s平面的左半平面。
10、在阶跃输入下,为了研究被控对象,应记录响应的“过渡过程曲线”还是“稳定之后的曲线”?如果是正弦输入呢?在阶跃输入下,应记录“过渡过程曲线”,正弦输入下,应记录“稳定之后的曲线”。
因为一般情况阶跃输入下是在时域下研究被控对象,而正弦输入一般是在复频域研究。
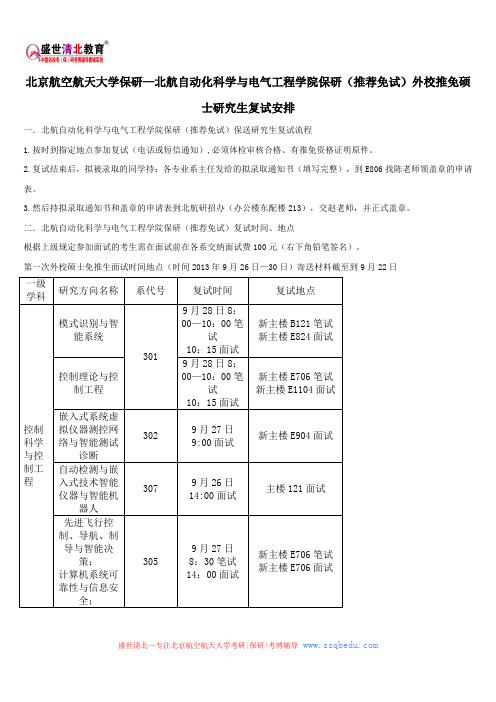
北京航空航天大学保研—北航自动化科学与电气工程学院保研(推荐免试)外校推免硕士研究生复试安排
14:00 面试
机械 机械电子工程 303
工程
电气
电气工程
304
工程
9 月 26 日 8:00-9:00
笔试 9:15 面试 9 月 26 日 8:30 笔试 14:00 面试
新主楼 B202 笔试 新主楼 E1020 面试
新主楼 E706 笔试 新主楼 E920 面试
第二次外校硕士免推生面试时间地点(时间 2013 年 10 月 8 日—9 日)寄送材料截至到 9 月 28 日
一级 研究方向名称
学科
模式识别与智 能系统
控制理论与控 制工程
控制 科学 与控 制工 程
嵌入式系统虚 拟仪器测控网 络与智能测试
诊断 自动检测与嵌 入式技术智能 仪器与智能机
器人 先进飞行控 制、导航、制 导与智能决
策; 计算机系统可 靠性与信息安
全;
系代号 301 302 307 305
复试时间
复试地点
9 月 28 日 8: ห้องสมุดไป่ตู้0—10:00 笔
试 10:15 面试 9 月 28 日 8: 00—10:00 笔
试 10:15 面试
新主楼 B121 笔试 新主楼 E824 面试
新主楼 E706 笔试 新主楼 E1104 面试
9 月 27 日 9:00 面试
新主楼 E904 面试
9 月 26 日 14:00 面试
10 月 9 日 8:30 笔试 14:00 面试
新主楼 E706 笔试 新主楼 E706 面试
盛世清北—专注北京航空航天大学考研|保研|考博辅导
10 月 9 日
新主楼
现代仿真与虚
10:00-12:00
308
2021年北航自动化系笔试及面试经验
北航自动化系笔试及面试经验一、笔试(共300分)1.概率题,大致如下:一位外国人想去观看 ___比赛,他去看篮球比赛的概率是20%,去看网球的概率是30%,去看游泳的概率为10%,去看排球的概率为40%。
篮球馆一定能买到票,网球馆买不到票的概率为20%,游泳馆买不到票的概率为10%,排球馆买不到票的概率为30%。
请问这位外国人在没有买到票的前提下,最可能去哪个馆看比赛。
2.线性代数题:给出一个二次型,求证它的二次型矩阵。
3.静力学题:一个三连杆,用力的平衡求出各结点所受的力。
4.动力学题:求一个在F拖动下,粗糙平面上滚动的圆盘的运动微分方程。
经过一段时间,求出该圆盘的动能。
5.自控理论题:给出一个传递函数,画出其根轨迹图。
6.自控理论题:给出一个方框图,求出其传递函数,并根据传函中的待定参数,判断参数在什么条件下该系统稳定。
(要用到梅森增益公式,方框图有点复杂)7.自控理论题:给出一个传递函数,画出其波特图,并求出相角裕度和幅角裕度,判断该传函数所确定的'系统在什么条件下稳定。
8.自控原理题:用奈奎斯特稳定判据判据系统稳定性。
9.模电题:一道关于加减运算放大电路的运算题。
然后根据给出的初始状态,求出输出的电流响应函数。
10.数电题:一道关于TTL电路的题。
11.英语翻译:5道英翻中,5道中翻英。
二、面试(共200分)面试分为三组面试,分别为理论组、工程实践组、英语组。
每个同学都要分别去三组面试。
每组面试时间为5分钟。
理论组:从三个不同袋子中抽出一个题进行作答。
三个题分别为数学、物理、自控理论题。
题目范围很广,这个得看基础和运气了。
我的数学题是口述一道线性代数证明题的解题思路。
物理题是什么条件下动量定理守恒, ___守恒。
自控理论题是给出传递函数(gs+1)/s2(Ts+1),用奈奎斯特判据判断,g和T在什么情况下这个系统稳定。
据据别的同学抽的题来看,题目范围覆盖高数、概率、线代、复变、静力学、动力学、自控、现代控制等各题,个人感觉无法备考,只能看基础和运气了。
北航自动化双控方向考研复试总结
复试共分为笔试和面试。
面试又细分为理论、工程、英语三个组。
笔试满分150分,本人认为十分难,本来考前愁笔试愁的肠子都快断了,后来一看考题,顿时释然了,因为这个难度和题量,本人认为大家肯定也都半斤八两。
考完之后众人丝聚在一起分析也都认为笔试应该只是个参考。
但是不能因此就说不重视笔试,你要是能做上其他人做不出的题,你也有优势嘛不是!笔试具体考题本人实在记不起来,但是考的科目可以说说:概率(3道)、静力学(2道还是3道记不太清了)、自控(3道)、单片机应用连线题一道、C语言编程一道(我们考的是编一个万年历,已知2008年1月1日是星期X,要求这个函数能完成以下功能:输入年月日,输出这天是星期几)、设计题一道(要求不高,给出大致框架即可)、汉译英1段(个人认为超难)、英译汉2段(比汉译英容易多了),还有一道题(在卷子上是第二大题),由于本人丝智商趋近窝狗,不知道到底考的是什么,就我理解可能是考平面几何,初中的内容。
这些科目以后不知道会不会有变化,大家做参考吧。
面试是重头戏,原先复试通知上写的是英语50、理论工程各150,但是今年道听途说听说英语50、理论50、工程200(这样算复试总分就是450了,因此这个消息的准确性有待考证)。
英语面试没有了复试通知中的自我介绍,但是以后不知道会不会有,最好有备无患。
进去以后直接读几段专业性外语,然后翻译。
单词读错一个扣一分,翻译翻错一处扣一分,所以口语不太标准的同学们小心咯!本人觉得读还行,但是翻译起来有点难。
最后大家一般都得40分左右。
理论面试,进去以后先简单的自我介绍一下(不需要刻意准备,真的是很简单的自我介绍,随便说说就可以,很多老师都不听),然后抽三道题,现场解答。
具体的题目类型有数学(高数线代都有,概率可能是笔试考的多,这里就没考,反正我没听说有概率题)、自控(经典线控都有)、静力学、动力学、大学物理。
三道题都打完了以后,老师可能还会问问你别的,这个因人而异。
北航机械工程及自动化学院2018年研究生复试笔试内容
北航机械工程及自动化学院2018年研究生复试笔试内容1、机械制造及自动化系080200中的01、02方向(先进制造工艺及微细加工技术、先进制造装备与数控技术)笔试内容:内容涵盖科目:《机械制造工程原理》、《现代加工技术》、《微型计算机技术及应用》等基础知识以及加工技术方面的常识性知识,参考书目不限;2、机电工程系080200中的03方向(计算机测控技术、机电一体化技术、嵌入式系统及无损检测技术)笔试内容:内容涵盖下列科目的基本知识:液压传动、信号处理、嵌入式系统、测试技术和模拟电路与数字电路,参考书目不限。
3、机器人研究所080200中的04方向(机器人技术)笔试内容:《机械原理》、《机械设计》、《微机原理》、《自控原理》等基础知识,及机器人技术方面的常识性知识。
4、机械设计及自动化系080200中的05方向(机械系统设计理论、CAD/CAE及控制技术)笔试内容:《机械设计》、《机械设计学》、《现代设计方法》、《微机原理》、《自控原理》。
5、工业与制造系统工程系080200中的07、08方向(计算机辅助设计与制造、信息系统与企业信息化)笔试内容:相关专业基础知识,主要包括下列科目基本知识:机械制造工艺学、CAD/CAM技术、生产运作与管理、C语言等,参考书目不限。
6、工业设计系080200中的06方向(机械工程学科的计算机图形学方向)招收专业硕士研究生复试内容:笔试内容:计算机图形学基础中图形变换相关内容及工程图学基础相关知识。
7、材料加工工程系080503中的01、02方向(先进材料成型与焊接技术,新型电源、焊接装备及自动化技术)笔试内容:专业课程内容:焊接工艺及设备、熔焊技术基础、材料成型原理,参考书不限。
8、飞行器制造工程系082503中的01、02、03方向(航空产品数字化设计制造一体化技术、精密塑性成形与装备技术、现代飞机制造工艺与自动化装配技术)笔试内容:软件技术基础(包括数据结构和C语言)、计算机辅助设计、制造工程基础相关知识。
北航复试问题
重要提示:此咨询答案是根据往年情况回答的,每年情况不一,所以并不代表明年会是完全一样。
如若回答和学校及上级文件有差异,以学校及上级文件为准。
关于第一志愿报考学术型还是专业型的情况介绍:航空科学与工程学院有6个系,具体见. cn/xyfc/xsjs/index.htm;对应专业见下表:080100 力学005 对应单位_ 01动力学与控制动力学与控制系_ 02结构与强度结构强度系(固体力学研究所)_ 03固体力学结构强度系(固体力学研究所)_ 04飞行器空气动力学空气动力学系(流体力学研究所)_ 05流体力学空气动力学系(流体力学研究所)_ 06实验力学结构强度系及空气动力学系都有_ 07计算力学结构强度系及空气动力学系都有080700005_ 01新型制冷及空调技术人机与环境工程系_ 02飞行器环境控制人机与环境工程系_ 03低温余热利用技术人机与环境工程系082500005_ 01飞行器总体设计飞机系_ 02飞行器结构设计及CAD 飞机系_ 03气动弹性数字化设计与主动控制飞机系_ 04航空器飞行动力学与控制飞行力学与飞行安全系_ 05航空器飞行安全飞行力学与飞行安全系_ 06安全工程人机与环境工程系_ 07环境控制及环境人机工程人机与环境工程系085232005航空工程备注:航空工程不区分专业方向,该专业在各个系都有,具体研究方向以导师归属的单位而定,面试时和专业学位学生一同进行。
举例来说:小B同学报考的A导师是飞机所的飞行器设计专业的,那么小B同学到飞机系的面试现场去,如果被录取后,课程培养计划偏向于飞行器设计方面。
1、贵院的工程热物理每年的报录比大概是多少?答:对于有复试资格的同学来说接近100%2、贵院的工程热物理专业是那年开始招收研究生的?答:比较早了。
3、历年复试分数线大概多少?答:学院历年复试分数线在2011年以前都是按照学校的照顾专业分数线(具体见研招办网页上的往年资讯的常见问题中/05CONTENTS/05ZCYBZ/recruit04_05Questi ons.htm),只是飞行器设计近几年的复试分数线会高20分左右,2011年分数线见下表。
2020年北京航空航天大学自动化学院研究生考研一志愿复试分数线及拟招生人数

北航自动化科学与电气工程学院2020年硕士研究生复试资格基本线我院根据校研究生院下达的招生计划情况及上线情况,经学院硕士研究生招生工作小组讨论建议、并经校研究生招生领导小组审核,自动化科学与电气工程2020年硕士研究生复试资格基本线如下:说明:1.我院实行差额复试,差额比例一般总体不低于120%。
初试各项成绩(包括总分和单科)达到报考第一志愿专业我院复试资格基本线要求的考生名单请点击附件下载查看。
我院对一志愿满足学院线的考生发送邮件,请注意及时接收和回复,考生若有问题亦可通过邮件进行咨询。
2.我院复试实行按专业和研究方向分组复试,其中081100控制科学与工程下设7个研究方向,分别为:01控制理论与控制工程(301系),02模式识别与智能系统(301系),03自动测试与智能检测(302系),04导航、制导与控制(305系),05智能与自动化安全(306系),06智能仪器与智能机器人(307系),07仿真与智能制造(308系);085400电子信息专业下设9个研究方向,分别为:01控制理论与控制工程(301系),02模式识别与智能系统(301系),03自动测试与智能检测(302系),04导航、制导与控制(305系),05智能与自动化安全(306系),06智能仪器与智能机器人(307系),07仿真与智能制造(308系),08机械电子工程(303系),09电气工程(304系);其他专业不区分研究方向。
各研究方向拟招生人数详见复试方案,请各位上线考生提早做好填报研究方向志愿准备(不区分研究方向的专业不需填报志愿)。
3.我院080200机械工程(学术学位)和085500机械(专业学位)接收调剂,080800电气工程(学术学位)专业将根据一志愿复试录取情况,确定是否接收调剂。
有关调剂要求将于5月20日左右通过学院网站公布,并同时在教育部调剂系统发布,通过教育部调剂系统进行。
4.我院将按照学校统一部署公布一志愿复试方案,请广大考生及时关注学院网站信息。
北航机械工程及自动化学院招收2017年硕士研究生复试工作方案

北航机械工程及自动化学院招收2017年硕士研究生复试工作方案一、机械学院复试资格基本线根据2017年硕士研究生招生初试成绩统计结果和各学科招生规模情况,经机械学院研究生招生工作领导小组讨论决定, 2017年硕士研究生招生复试资格基本线如下:考试方式一志愿报考专业[专业代码]总分单科单科(满分=100分)(满分>100分)全国统考(不含少数民族骨干计划和退役大学生计划)机械工程 [080200] 350 40 70 材料加工工程[080503] 310 40 70航空宇航制造工程[082503]340 40 70机械工程(专业学位)[085201]300 40 70 强军计划290 40 60 退役大学生计划290 40 70说明:初试各项成绩(包括总分、政治、外国语、业务课1和业务课2)达到报考第一志愿专业所在学院复试资格基本线的考生可参加机械学院复试。
强军计划和退役大学生的考生若满足我院制定的复试资格基本线,也需参加本次复试, 上线学生自动获得一志愿报考专业复试资格,学院不再单独通知,名单见附件4。
二、机械学院硕士研究生复试工作小组组长:赵罡副组长:蔡军成员:边宇枢、李刘合、李东升、陈华伟、杨民、刘静华、陈殿生、郑联语秘书:乐悦三、机械学院硕士研究生思政考核工作小组由学院分党委委员、党员系所主任、系所党支部书记组成,名单如下:组长:邓怡成员:赵罡、蔡军、周正干、李东升、于靖军、从保强、闵敏、李刘合、边宇枢、吴琼、张伟、孟宝、陈华伟、彭翀、杨民、文力、刘静华、刘永瞻、陈殿生、王巍、郑联语、魏巍四、复试资格审查机械学院按照北航研招网上公布的“2017年硕士研究生招生复试资格基本线及复试规定”要求,对考生的复试资格进行严格审查。
不符合规定者,不得参加复试。
(所有参加复试的学生均需按时间进行资格审查,复试前没有进行资格审查的视为放弃复试资格)1、资格审查时间、地点(1) 3月25日(上午8:30——11:30,下午2:30——下午5:30)到北航新主楼A849办理资格审查手续;(2)过时不予补办,贻误资格审查不能参加复试,责任自负。
北京航空航天大学2010年考研复试线公布
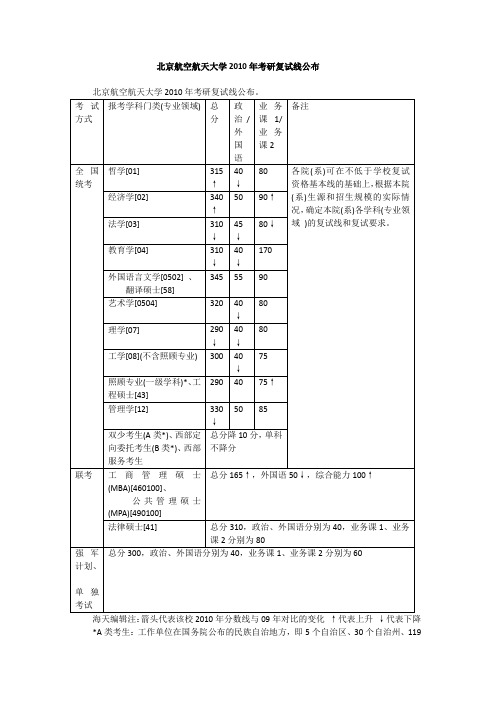
北京航空航天大学2010年考研复试线公布*A类考生:工作单位在国务院公布的民族自治地方,即5个自治区、30个自治州、119个自治县(旗),报考类别为定向或委托培养,且毕业后回原单位的少数民族在职人员考生。
*B类考生:工作单位在三区(包括内蒙古、广西、海南、贵州、云南、西藏、甘肃、青海、宁夏、新疆10省区),报考类别为定向或委托培养,且毕业后回原单位的在职考生。
*照顾专业(一级学科):力学[0801]、动力工程及工程热物理[0807]、船舶与海洋工程[0824]、航空宇航科学与技术[0825]、兵器科学与技术[0826]。
说明:1、各院(系)可在不低于学校复试资格基本线的基础上,根据本院(系)生源和招生规模的实际情况,确定本院(系)各学科(专业领域)的复试线和复试要求;2、第一志愿达到我校复试资格基本线的考生是否能参加第一志愿专业复试,请上网进行复试资格查询(/)或向第一志愿报考学院(系、所)咨询(点击此处查看)。
具体复试时间、地点及相关要求的查询方法相同。
3、报考我校参加全国统考的考生,若第一志愿达到所在相应学科门类(专业领域)的我校复试资格基本线且满足调剂院系的复试要求,即可以申请进行调剂,经调剂院系同意后参加复试。
4、参加少数民族高层次骨干人才计划考生的复试线将于四月上旬公布。
5、复试考生均需要进行复试资格审查考生在复试时除复试通知书(北航研究生招生信息网上下载,无须盖研招办公章)外,还须携带以下材料,材料齐全方可进入复试(调剂考生可以无复试通知书,但需向调剂院系提供初试成绩):(1)本人有效身份证件原件及一份复印件(身份证、军官证,应届本科毕业生和成人应届本科毕业生还需持本人学生证,纸型为A4纸,身份证正、反面需复印在同一页面上);(2)交纳复试费100元(3)非应届本科毕业生及非成人应届本科毕业生还需携带以下各类材料:A、学历证书原件及一份复印件;B、由档案所在单位人事部门提供的在校历年学习成绩表复印件,并需加盖档案所在单位人事部门公章;(4)应届本科毕业生需携带所在学校教务部门提供并加盖公章的在校历年学习成绩表(毕业证书需于新生开学报到时向院系提供原件与复印件);(5)以同等学力身份报考我校的考生,还需提供符合其报考资格要求的各类材料原件及复印件。
北航13年复试方向选择
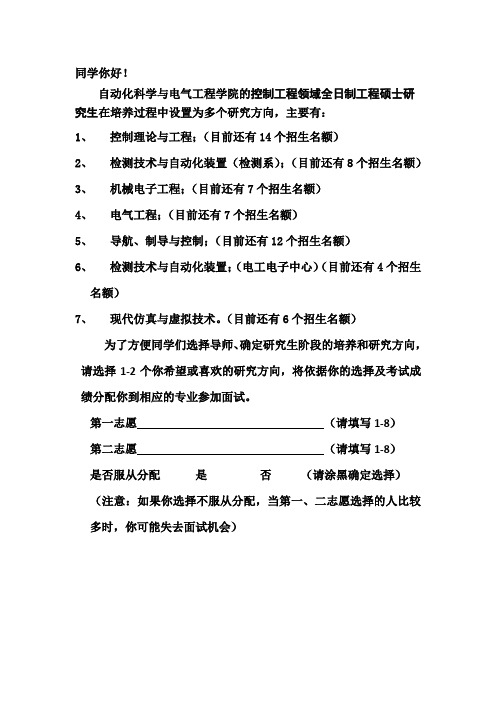
同学你好!
自动化科学与电气工程学院的控制工程领域全日制工程硕士研究生在培养过程中设置为多个研究方向,主要有:
1、控制理论与工程;(目前还有14个招生名额)
2、检测技术与自动化装置(检测系);(目前还有8个招生名额)
3、机械电子工程;(目前还有7个招生名额)
4、电气工程;(目前还有7个招生名额)
5、导航、制导与控制;(目前还有12个招生名额)
6、检测技术与自动化装置;(电工电子中心)(目前还有4个招生
名额)
7、现代仿真与虚拟技术。
(目前还有6个招生名额)
为了方便同学们选择导师、确定研究生阶段的培养和研究方向,
请选择1-2个你希望或喜欢的研究方向,将依据你的选择及考试成绩分配你到相应的专业参加面试。
第一志愿(请填写1-8)
第二志愿(请填写1-8)
是否服从分配是否(请涂黑确定选择)
(注意:如果你选择不服从分配,当第一、二志愿选择的人比较多时,你可能失去面试机会)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
补充版:北航复试注重计控,数电,计控方面的只是,还有很杂的东西都有,比如概率论,模电,但那不是重点,要是不会的话就直接跟老师说自己忘了,但是其它科目得学得好。
面试时把老师往自己会的方向引就好。
当然要好好准备了
以下是自己在复习时总结的东西,有一些是往届复试题,答案瞎写的,仅供参考。
I、笔试
3、填空题:在微分方程、传递函数、状态空间方程三种形式下,二阶系统的固有频率分别由什么量给出。
A.微分方程系数(sqrt(a2/a0));
B.wn;
C.特征值(sqrt(入1*入2))。
4、给了一个弹簧振子的图,根据条件写出微分方程。
这个应该会
5、给了一个系统的电路图,让你补全负反馈部分的电路,并且画出系统的框图。
真心不好,电路原理很重要!!!!!!!!!
6、PID控制的特点是什么?比例、积分、微分对系统分别有什么影响?
PID特点是结构简单,稳定性好,工作可靠,调整方便。
比例系数Kp对系统性能的影响:稳定情况下,Kp增加,稳态误差减小,系统响应速度加快,但如果Kp偏大,调节时间加长,甚至不稳定;
积分控制能消除系统静差,但如果积分作用太强,系统将不稳定;
微分能预测误差变化趋势,选择合适的微分作用能减小系统超调,缩短调节时间,允许加大比例控制,但微分作用过大或过小都会适得其反。
7、保持器的作用是什么?
在被控对象前加一个保持器充当滤波器的作用,可以再现主频谱分量而除掉附加的高频谱分量,把数字信号无失真的恢复成连续信号。
8、离散系统的稳定条件是什么?
闭环脉冲传递函数的全部极点位于z平面上以原点为圆心的单位圆内。
9、连续系统的稳定条件是什么?
闭环传递函数的全部极点位于s平面的左半平面。
10、在阶跃输入下,为了研究被控对象,应记录响应的“过渡过程曲线”还是“稳定之后的曲线”?如果是正弦输入呢?
在阶跃输入下,应记录“过渡过程曲线”,正弦输入下,应记录“稳定之后的曲线”。
因为一般情况阶跃输入下是在时域下研究被控对象,而正弦输入一般是在复频域研究。
11、画出一阶系统的阶跃响应曲线和脉冲响应曲线,说明一阶系统的特点。
一阶系统单位阶跃响应没有超调,系统时间常数越小,调节时间越小,响应过程快速性越好。
12、机器语言、汇编语言、高级语言分别有什么特点?哪种语言执行速度最快?
机器语言是只有计算机才能识别的语言,程序里面只有0和1组成,编程困难,容易出错;汇编语言接近机器语言,能对计算机的内存地址直接进行操作,但是人可以识别这种语言;高级语言比汇编语言更容易让人们识别编写,但计算机识别比较困难;
由于计算机能直接识别机器语言,所以机器语言执行速度最快。
13、如果系统的时间常数为T,那么计算机控制系统的采样周期应该为多少?
这要根据具体情况而定(这个我真心不会不会)
14、采样频率如何确定?它与计算机硬件有怎样的关系?
一个连续信号所含频率分量的最高频率为wmax,如果采样频率w>2wmax,那么就可以从采样信号中不失真地恢复原连续信号。
但是具体情况还要实际需求而定。
采样频率越大,计算机运行速度,AD、DA的转换速度的要求就高一些,也就更难实现。
II、面试
一、英语口试50分,所有的问答全部是英语。
1、进行1分钟左右的自我介绍
2、从若干张纸条中抽取一张,朗读上面的英文,并翻译,约200个单词。
3、问答:
(1)你为什么要考研?
(2)你为什么选择北航读研?
(3)你认为,线性系统与非线性系统的主要区别是什么?
线性系统满足叠加原理,非线性系统不满足。
线性系统动态过程的形式与起始偏差或外作用的大小无关
二、专业综合面试250分,又包括两部分:专业知识问答和其他问答,这两部分没有具体的分值比例和数量比例,我想主要根据面试老师的喜好以及你现场的表现。
1、专业知识问答:
(1)什么是最小相位系统?
系统所有零点和极点都在左半平面的系统
(2)什么是放大器的频率响应?
放大电路对输入正弦信号的稳态响应。
反映了放大器对不同频率信号的放大能力
(3)在饱和状态下,三极管的极电结是什么状态?
忘了
(4)什么是组合逻辑电路?什么是时序逻辑电路?
任意时刻的输出状态取决于该时刻输入信号的状态,而与信号作用之前电路的状态无关。
不包含记性原件
时序逻辑电路的输出不仅与该时刻的输入状态有关,而且还和电路原来的状态有关。
(5)什么是竞争冒险现象?
由于受电路的延迟等因素的影响,使得原本正常的逻辑关系发生了混乱的现象。
举例:与非门尖波
(6)消除竞争冒险的方法
A.修改逻辑设计,逻辑函数表达式上加上冗余项。
B.输出端并接一个几十pf甚至几百pf的滤波电容。
C.引入选通脉冲,在电路达到稳定状态之后,加入选通脉冲,这样……就不会输出了。
(7)什么是触发器?
触发器就是存储原件,通常在不断电的条件下长期保持一个二进制状态,直到有输入信号引导它转换到另一个状态为止。
(8)时序逻辑电路分析步骤
A.写驱动方程和输出方程
B.状态方程
C.列真值表,画状态转换图
D.分析逻辑功能
2、其他问答:
(1)你在大学期间参加过科技、竞赛等活动吗?
数学建模计算机博弈好好准备
(2)你的毕业设计做的是什么?
(3)你联系导师了吗?
微机
(1)一个中断来了,计算机应该做什么?(可屏蔽中断为例)
(2)计算机和外设通信方式有哪些?(至少说三种)
计控
(1)计控典型结构由哪几部分组成?
应该会
(2)与常规连续控制系统相比,计控有什么优点?
设计控制灵活(编程、算法多样)、能实现集中监视和操作(分时操作、监视多个控制量)、能实现综合控制(存储、逻辑、判断功能环境参数变化时…)、可靠性高抗干扰强(自诊断修复)(3)A/D转换芯片类型有哪几种?
计数器式、并行比较式、双积分式、逐次逼近式
(4)A/D将连续信号变成数字信号要完成哪些变换?A/D转换误差主要由什么决定?
采样、量化、编码3个变换。
A/D转换器的转换速率和转换精度(量化误差)来决定。
(5)计控中稳态误差和采样周期有什么关系?
如果被控对象中有足够的积分环节,那么没有关系。
否则采样周期越小,稳态误差也越小。
(6)数字控制器设计方法有哪些
a.离散化设计法(直接设计)
b.模拟化设计方法(间接)
c.状态空间设计法
d.先进控制规律的设计方法
(7)采用模拟化设计方法特点
设计简单,易于掌握,但是采样频率要求高
(8)什么情况下模拟控制器可以离散化?方法有哪些?
a.保证系统稳定性
b.控制器的动态性能尽可能相似
Z变换法,差分变换法,双线性变换法,零极点匹配法
(9)什么是最小拍系统
也称为最少调节时间系统,是指系统对典型输入信号,具有最快的响应速度,经过最少个采样周期,使得输出的稳态误差为零,达到输出完全跟踪输入的目的。
(10)最小拍存在问题
采样点之间可能存在纹波
对各种典型信号输入函数适应性差
对被控对象的模型参数变化敏感
(11)最小拍无纹波控制必须满足的条件
A.被控对象中含有足够的积分环节
B.满足纹波控制的稳定性和控制器物理可实现要求
C.WB(z)包含对象所有单位圆外和圆内的零点
(12)什么是振铃现象
指数字控制器的输出以1/2采样频率大幅度衰减振荡。
由于被控对象中惯性环节的低通特性,使得这种振荡对系统的输出几乎没有影响。
但是这种振荡现象会增加执行机构的磨损。
(13)连续系统稳定,离散后不稳定怎么办?。