【CN109771214A】一种步态训练康复机器人【专利】
【CN109771213A】一种步态训练康复机器人的下肢结构【专利】

5 .根据权利要求1所述的一种步态训练康复机器人的下肢结构,其特征在于:所述膝关 节安全限位部分至少包括:膝关节连接臂(9)、膝关节下限位块(15)、膝关节上限位块(16) ; 所述膝关节上限位块(16)和膝关节下限位块(15)与膝关节连接臂(9)之间通过间隙配合并 在固定范围内进行一定角度滑动,且滑动角度为膝关节安全活动角度范围。
(51)Int .Cl . A61H 1/02(2006 .01)
(10)申请公布号 CN 109771213 A (43)申请公布日 2019.05.21
( 54 )发明 名称 一种步态训练康复机器人的下肢结构
( 57 )摘要 本发明公开了一种步态训练康复机器人的
下肢结构 ,属于医 疗康复 器械技术领域 。它包括 左髋关节部分、右髋关节部分以 及左膝关节部 分、右膝关节部分四个关节。传感器部分中 ,关节 传感器通过与外压紧法兰、内压紧法兰、交叉滚 子轴承配合 ,从而测得关节力矩值 ;驱 动部分中 关节电机与关节蜗轮蜗杆减速器固定,关节蜗轮 蜗杆减速器通过与关节减速器法兰配合将扭矩 输出给关节力矩传感器内圈 ,从而驱动关节转 动。本发明中关节处力矩传感器结构能够实时读 取关节处 力矩值 ,从而能 够实现 力控 制 ,以 及实 现被动训练,主动训练等康复训练的功能。
【CN109674600A】一种步态训练康复机器人安全活动扶手【专利】
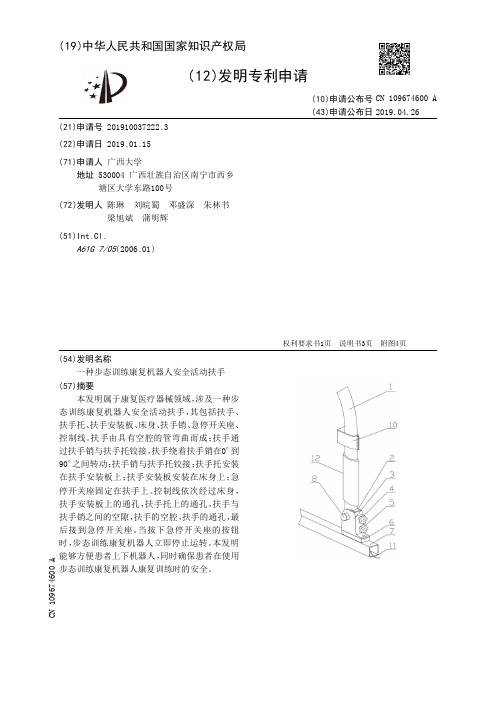
所述梅花把手a (4) 和梅花把手b (5) 都安装在扶手托 (3)的C面 ;所述梅花把手b (5) 在梅 花把手a(4)的正下方;
所述扶手托(3)底部开有通孔(3-1) ,扶手托(3)安装在扶手安装板(6)上;所述扶手安 装板(6)中间开有通孔(6-1) ,扶手安装板(6)安装在床身(7)上 ;
所述扶手销(8)穿过扶手(1)上的圆孔(1-2)与扶手托(3)铰接; 所述急停开关座(10)固定在扶手(1)上。 2 .根据权利要求1所述的一种步态训练康复机器人安全活动扶手,其特征在于:所述扶 手(1)绕着扶手销(8)从水平0 °以顺时针方向转动到竖直90 °,当所述扶手(1)在水平0 °时, 扶手(1)前端与床身(7)接触,梅花把手b(5)向外移动,梅花把手a(4)向内移动,挡板b(9)被 梅花把手a(4)挡住固定;所述扶手(1)在竖直90 °时,梅花把手a(4)向外移动,梅花把手b(5) 向内移动,挡板b(9)与梅花把手b(5)接触,挡板a(2)与扶手托(3)上端接触。 3 .根据权利要求1所述的一种步态训练康复机器人安全活动扶手,其特征在于:所述梅 花把手a(4)和梅花把手b(5)中至少保留梅花把手b(5) ;当所述扶手(1)在水平0 °时,扶手 (1) 前端与床身 (7) 接触 ,梅花把手b (5) 向 外拔出并插入到所述梅花把手a (4) 处的 螺纹孔 (4-1) ,梅花把手b(5)再向内移动,挡板b(9)与梅花把手b(5)接触;当所述扶手(1)在竖直 90 °时,梅花把手b(5)向外拔出并插入到梅花把手b(5)处的螺纹孔(5-1) ,梅花把手b(5)再 向内移动,挡板b(9)与梅花把手b(5)接触,挡板a(2)与扶手托(3)上端接触。 4 .根据权利要求1所述的一种步态训练康复机器人安全活动扶手,其特征在于:所述控 制线(11)依次经过床身(7) ,扶手安装板(6)上的通孔(6-1) ,扶手托(3)上的通孔(3-1) ,扶 手(1)与扶手销(8)之间的空隙,扶手(1)的空腔,扶手(1)的通孔(1-1) ,最后接到急停开关 座(10) ;当按下急停开关座(10)的按钮时 ,步态训练康复机器人立即停止运转。 5 .根据权利要求1所述的一种步态训练康复机器人安全活动扶手,其特征在于:所述扶 手套(12)安装在扶手(1)上,使得病人手握扶手时有舒适感。
步态训练康复机器人[发明专利]
![步态训练康复机器人[发明专利]](https://img.taocdn.com/s3/m/8d56773ead51f01dc381f11d.png)
专利名称:步态训练康复机器人
专利类型:发明专利
发明人:陈立典,窦祖林,王诗忠,陶静,陈永源,伍水明,张国忠申请号:CN200910041694.2
申请日:20090805
公开号:CN102961231A
公开日:
20130313
专利内容由知识产权出版社提供
摘要:本发明的目的是提供一套全面的步态训练康复系统,步态康复训练机器人包括机械腿包括髋部杆(23)、大腿股(24)、小腿股(25)、小腿股外套(26)和直线传动单元(20),其特征在于:髋部杆(23)与大腿股(24)通过活动轴承铰接成髋关节,大腿股(24)与小腿股(25)通过活动轴承铰接成膝关节,第一个直线传动单元(20)的后端与髋部杆(23)下侧面铰接,第一个直线传动单元的活动端与大腿股(24)铰接,通过第一个直线传动单元的伸缩驱动,便构成了髋关节活动;大腿股(25)套上一个小腿股外套(26),通过调节小腿股外套(26)的位置来调节大腿的长度,第二个直线传动单元的一端与大腿股外套(24)铰接,第二个直线传动单元的活动端与小腿股(24)铰接,通过第二个直线传动单元的伸缩驱动,便构成了膝关节活动。
申请人:广州一康医疗设备实业有限公司
地址:511400 广东省广州市番禺区迎宾路730号天安科技创新大厦
国籍:CN
代理机构:北京同辉知识产权代理事务所(普通合伙)
代理人:刘洪勋
更多信息请下载全文后查看。
【CN109846642A】一种步态训练康复机器人髋部宽度调节锁紧机构【专利】
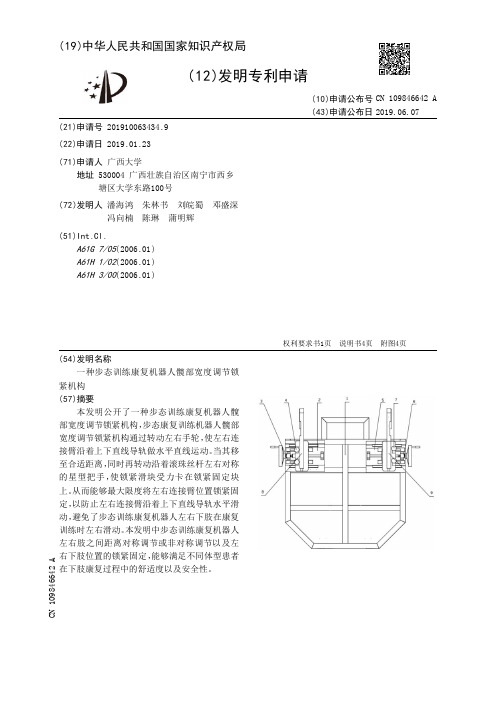
3 .根据权利要求书1所述的一种步态训练康复机器人髋部宽度调节锁紧机构,其特征 在于:所述左连接臂(8)和右连接臂(9)之间的距离可通过左伸缩机构(3)和右伸缩机构(6) 分别调节,距离范围为300mm到600mm。通过对称调节或者非对称调节左右连接臂之间距离, 实现整个步态训练康复机器人的左、右下肢之间距离的调整,从而为患者带来舒适性和便 利性。
2 .根据权利要求书1所述的一种步态训练康复机器人髋部宽度调节锁紧机构,其特征 在于 :所述左伸缩机构 (3) 和右伸缩机构 (6) 结构对称 ;所述左伸缩机构 (3) 至少包括 :手轮 (15) 、滚珠丝杆 (16) 、轴承座A (17) 、丝杆螺母 (18) 、螺母座 (19) 、轴承座B (20) 、上直线导轨 (21) 、上滑块(22) 、下滑块(23) 、下直线导轨(24) ;
所述左安装板 (2) 和右安装板 (5) 左右对称 ,左安装板 (2) 和右安装板 (5) 分别安装在床 身(1)前端的左右对称两侧下方;
所述左连接臂(8) 和右连接臂(9)的两侧分别开有阶梯孔 ;左连接臂(8) 和右连接臂 (24)分别安装左伸缩机构(3)和右伸缩机构(6)上;
所述左伸缩机构 (3) 和右伸缩机构 (6) 结构对称 ,左伸缩机构 (3) 和右伸缩机构 (6) 分别 安装在左安装板(2)和右安装板(5)上;
权利要求书1页 说明书4页 附图4页
CN 109846642 A
一种康复训练机器人[发明专利]
![一种康复训练机器人[发明专利]](https://img.taocdn.com/s3/m/ae9e684ef524ccbff021846a.png)
专利名称:一种康复训练机器人
专利类型:发明专利
发明人:韩君,张淑芳,郭凯,由佳,胡波申请号:CN201910407520.7
申请日:20190515
公开号:CN110123591A
公开日:
20190816
专利内容由知识产权出版社提供
摘要:本发明公开了一种康复训练机器人,包括机器人部分和训练部分,机器人部分和训练部分通过固定装置连接。
本发明使得患者的语音通过语音识别模块转化为指令,将指令反馈到中央处理器,中央处理器根据接收到的指令执行相应的操作,当接受到训练指令时,中央处理器控制第一步进电机逆时针转动90度,控制第二步进电机顺时针转动90度,当接受到停止指令时,中央处理器控制第一步进电机顺时针转动90度,控制第二步进电机逆时针转动90度,当接受到转向指令时,中央处理器控制车轮驱动装置进行转向,当接受到行驶指令时,中央处理器控制车轮驱动装置驱动机器人车轮行驶,当接受到停车指令时,中央处理器控制车轮驱动装置驱动机器人车轮停止。
申请人:宿州学院
地址:234000 安徽省宿州市埇桥区朱仙庄镇二铺村
国籍:CN
代理机构:西安铭泽知识产权代理事务所(普通合伙)
代理人:俞晓明
更多信息请下载全文后查看。
一种康复机器人[发明专利]
![一种康复机器人[发明专利]](https://img.taocdn.com/s3/m/e6659740d1f34693dbef3e70.png)
专利名称:一种康复机器人
专利类型:发明专利
发明人:陈杰
申请号:CN201811050947.8申请日:20180910
公开号:CN109009445A
公开日:
20181218
专利内容由知识产权出版社提供
摘要:本发明公开了一种康复机器人,包括横向气缸,所述横向气缸的内部活动安装有一号活塞板,且一号活塞板的一侧外表面焊接有横向推轴,所述横向气缸的一端外表面焊接有固定块,所述横向推轴的一端活动安装有转球,所述转球的一侧外表面焊接有旋转片,且旋转片的一侧外表面活动安装有旋转圆盘,所述旋转圆盘的一端外表面焊接有夹爪,所述固定块的上端外表面焊接有载重台,且载重台的上端外表面焊接有纵向气缸,所述横向气缸与纵向气缸的一侧外表面均焊接有平衡柱。
本发明所述的一种康复机器人,设有外齿轮、推轴与转球,能够简化操作的步骤,并能更好的夹紧工具,还可以提高工作效率,带来更好的使用前景。
申请人:广东宏穗晶科技服务有限公司
地址:528000 广东省佛山市三水区乐平镇乐华南路4号揽月一号双创基地启明座2楼202
国籍:CN
代理机构:佛山市智汇聚晨专利代理有限公司
代理人:张艳梅
更多信息请下载全文后查看。
一种减重式步态康复训练机器人[发明专利]
![一种减重式步态康复训练机器人[发明专利]](https://img.taocdn.com/s3/m/6533eaedbb68a98270fefab2.png)
专利名称:一种减重式步态康复训练机器人专利类型:发明专利
发明人:陈磊,杨长牛,黄文权,刘郁葱,孙泽刚申请号:CN201611001529.0
申请日:20161114
公开号:CN106361543A
公开日:
20170201
专利内容由知识产权出版社提供
摘要:本发明公开了一种减重式步态康复训练机器人。
本发明包括康复平台、智能减重装置、步态模拟发生装置;所述智能减重装置安装于康复平台的顶部,所述步态模拟发生装置安装于康复平台的底部并位于智能减重装置下方。
本发明能实现主被动康复训练,用于脑瘫、中风等造成的步行障碍训练者的康复训练。
本发明提供的减重式步态康复训练机器人由计算机控制,配有相应的传感器和安全装置,为患者提供了不同的行走训练模式,通过步态模拟发生器带动患者的双侧下肢可进行步态康复训练,逐渐恢复患者下肢的行走能力。
与传统的减重步态训练相比,大大减轻了治疗师的工作强度,更加智能化,治疗个体化。
申请人:四川理工学院
地址:643000 四川省自贡市汇东学苑街180号
国籍:CN
代理机构:成都顶峰专利事务所(普通合伙)
代理人:杨俊华
更多信息请下载全文后查看。
一种康复训练机器人[实用新型专利]
![一种康复训练机器人[实用新型专利]](https://img.taocdn.com/s3/m/a29b66743d1ec5da50e2524de518964bcf84d2e2.png)
专利名称:一种康复训练机器人
专利类型:实用新型专利
发明人:张国庆,郝赛赛,林媛媛,郑德金,王福强申请号:CN202120652045.2
申请日:20210331
公开号:CN216021953U
公开日:
20220315
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种康复训练机器人,包括:底座支撑机构;多个机械臂,设置在底座支撑机构相对的两侧上;双足末端执行机构,连接机械臂中的旋转机构,双足末端执行机构包括足底连接板,其底部设置有芯轴安装槽,芯轴安装槽内安装有芯轴,旋转机构的输出轴位于芯轴内,且芯轴的两端安装有免键轴衬,免键轴衬位于芯轴和输出轴之间,且足底连接板的底部还安装有支架,支架的两侧与足底连接板固定连接,且部分覆盖在芯轴上;骨盆支撑机构,设置在底座支撑机构上。
本实用新型增强了结构的机械强度,并且增加了其负载能力,同时方便进行拆卸和安装。
申请人:阁步(上海)医疗科技有限公司
地址:200433 上海市杨浦区国通路127号1201-2室
国籍:CN
代理机构:上海汉之律师事务所
代理人:马婷婷
更多信息请下载全文后查看。
【CN109846641A】一种步态训练康复机器人减重固定机构【专利】
( 12 )发明专利申请
(21)申请号 201910063183 .4
(22)申请日 2019 .01 .23
(71)申请人 广西大学 地址 530004 广西壮族自治区南宁市西乡 塘区大学东路100号
(72)发明人 韦海燕 邓盛深 朱林书 陈琳 梁旭斌 蒲明辉
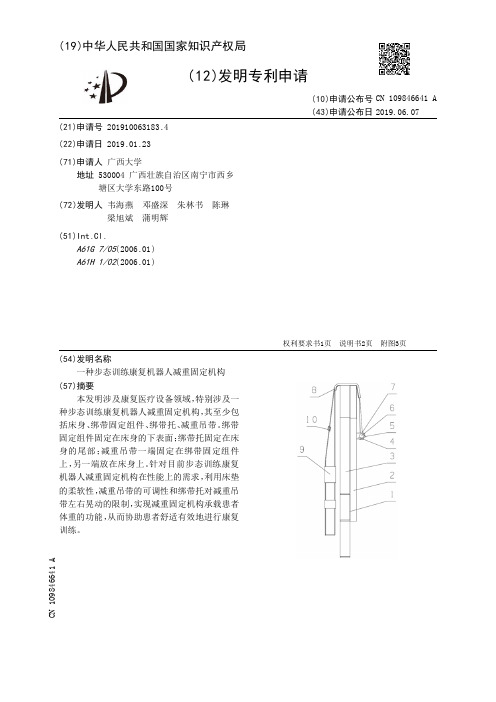
具体实施方式 [0018] 下面结合附图和具体实施例对本发明做进一步的说明。 [0019] 一种下肢康复训练机器人减重固定机构,至少包括床身1、绑带固定组件4、绑带托 8、减重吊带9。 [0020] 床身1至少包括床架2、床垫3;床垫3固定在床架2上,床架2由多根方形管焊接组 成 ,床垫3可由 海绵 ,皮革和塑料板组成 ,其中床垫3的 柔软性能 够使床身1对患者有缓冲作 用。 [0021] 绑带固定组件4设为两个,至少包括把手5、绑带固定销6、绑带固定座7;绑带固定 座7对称焊接在床架2的下表面,两根绑带固定销6分别穿过两个绑带固定座7上各自的两个 孔与两个把手5固定。 [0022] 绑带托8设为两个,呈类U型状,绑带托8上表面有凹槽;两个绑带托8,呈类U型口的 一面对称焊接在床架2的 尾部 ;减重吊 带9一端绕 在绑带固定组件4中的 绑带固定销6上 ,减 重吊带9穿过绑带托8上表面的凹槽,另一端自由放在床身1的床垫3上;减重吊带9通过凹槽 限制减重吊带9左右移动,从而防止患者在康复训练时左右晃动,提高患者在康复训练的适 应性和舒适性。 [0023] 减重吊带9左右两条带上分别设有方形扣10,可限制吊带的伸长或缩短,通过绑带 的伸缩长度可调性,以方便不同身高患者穿戴,提高患者在康复训练中的舒适性,降低医疗 人员的工作强度。 [0024] 最后说明的是本发明一种步态训练康复机器人减重固定机构不局限于上述实施 例 ,还可以 做各 种修改或变形。因此 ,说明书和附图 应被认为是说明性的 而非限 制性的 。凡 是依据本发明的 技术方案进行修改 、润饰或等同 变化 ,而不脱离本发明技术方案的 思想 和 范围 ,其均应涵盖在本发明的权利要求范围当中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(10)申请公布号 CN 109771214 A (43)申请公布日 2019.05.21
( 54 )发明 名称 一种步态训练康复机器人
( 57 )摘要 本发明属于康复医疗器械领域,涉及一种步
态训练康复机器人,其包括人体支撑机构和与之 相连的下肢外骨骼机构,其中人体支撑机构包括 床身 、带有急停开关的 扶手 、底架 、电 动推杆 、左 右单独可调的髋部调节机构,床身通过连接杆和 电动推杆安装在底架上,左右扶手对称安装在床 身的前端的两侧,髋部调节机构对称安转在床身 前端的下面;下肢外骨骼的髋关节和膝关节上分 别安装有机械限位块和电气限位开关。本发明的 步态训练康复机器人结构中设计了ห้องสมุดไป่ตู้重安全保 护机 制 ,能 够保障 患者在康复 训练时的 安全 ,同 时该康复机器人能满足1500mm到1900mm身高人 体在0°到90°之间任何角度的康复训练。
( 19 )中华人民 共和国国家知识产权局
( 12 )发明专利申请
(21)申请号 201910065606 .6
(22)申请日 2019 .01 .23
(71)申请人 广西安博特智能科技有限公司 地址 530004 广西壮族自治区南宁市西乡 塘区高新区科园西十路19号产业孵化 园B1栋
(72)发明人 陈琳 潘海鸿 梁旭斌 蒲明辉
所述床身 (1) 至 少由 床身骨架 (8) 和臀部坐板 (9) 组成 ;所述床身骨架 (8) 和臀部坐板 (9)通过螺纹固定连接;所述床身(1)通过连接杆(10)和电动推杆(5)安装在底架(4)上;
所述减重固定机构(2)安装在床身(1)上; 所述电 动推杆(5)的上端与床身骨架(8)转动连接 ,电 动推杆(5)的下端与支撑杆件 (12) 转动连接 ;所述电 动推杆 (5) 和连接杆 (10) 之间的 夹 角在00到900之间变化 ;所述电 动 推杆(5)直接推动床身(1)转动,床身(1)转动的范围为00到900; 所述连接臂(6)为L型;所述连接臂(6)L型的一端和髋部调节结构(7)固定连接,连接臂 (6)L型的另一端与下肢外骨骼(3)铰接; 所述髋部调节结构(7)安装在床身骨架(8)前端的下面; 所述连接杆 (10) 的 上端安装在臀部坐板 (9) 下面 ,连接杆 (10) 的 下端与支撑杆件 (12) 转动连接; 所述支撑杆件(12)安装在底架(4)上; 所述扶手(37)上部安装有急停开关 (38) ;所述扶手(37)安装在床身骨架(8)前部。 2 .根据权利要求1所述的一种步态训练康复机器人,其特征在于:所述减重固定机构 (2)至少包括绑带托(34)、绑带固定组件(35)、减重吊带(36) ;所述绑带托(34)上表面设有 凹槽,所述绑带托(34)焊接在床身(1)的尾部;所述绑带固定组件(35)焊接在床身(1)的下 表面 ;所述减重吊带 (36) 一端固定在绑带固定组件 (35) 上 ,减重吊带 (36) 另一端自由放在 床身(1)上;所述减重吊带(36)穿过绑带托(34)上表面的凹槽;所述绑带托(34)上表面的凹 槽能限制减重吊带(36)左右移动。 3 .根据权利要求1所述的一种步态训练康复机器人,其特征在于:所述下肢外骨骼(3) 至少包括髋关节驱动装置(15)、髋关节电气限位开关(16)、髋关节机械限位块(17)、大腿连 接杆(18)、大腿杆(22)、大腿调节块(23)、大腿角度传感器(24)、大腿支撑调节机构、小腿杆 (27) 、小腿 角度传感器 (28) 、小腿连接杆 (30) 、膝关节驱动装置 (31) 、膝关节电 气限 位开关 (32)、膝关节机械限位块(33)、小腿支撑调节机构;所述的髋关节驱动装置(15)通过螺纹连 接安装在连接臂 (6) 上 ;所述髋关节机械限 位块 (17) 通过螺栓固定在连接臂 (6) 上 ;所述髋 关节电气限位开关(16)安装在髋关节机械限位块(17)上;所述大腿连接杆(18)固定在髋关 节驱 动装置 (15) 的 轴上 ;所述大腿连接杆 (18) 的 末端开有矩形槽 ;所述大腿杆 (22) 的 一端 放置在大腿连接杆 (18) 的 矩形槽里 ,并通过螺栓固定在大腿连接杆 (18) 上 ;所述大腿 角度 传感器 (24) 安装在大腿杆 (22) 末端 ;所述膝关节驱 动装置 (31) 安装在大腿 调节块 (23) 下 端;所述大腿调节块(23)的上端开有滑槽,大腿调节块(23)通过滑槽连接在大腿杆(22)上; 所述大腿调节块(23)在大腿杆(22)上来回滑动;所述膝关节电气限位开关(32)安装在膝关 节机械限 位块 (33) 上 ;所述膝关节机械限 位块 (33) 安装在大腿调节块 (23) 下端 ;所述小腿 连接杆 (30) 的 一端固定在膝关节驱 动装置 (31) 轴上 ,小腿连接杆 (30) 的 另一端开有矩形 槽 ;所述小腿杆 (27) 一端放置在小腿连接杆 (30) 的 矩形槽里 ,并通过螺栓固定小腿连接杆 (30)上;所述小腿角度传感器(28)安装在小腿杆(27)末端。 4 .根据权利要求3所述的一种步态训练康复机器人,其特征在于:所述大腿支撑调节机
权利要求书2页 说明书6页 附图4页
CN 109771214 A
CN 109771214 A
权 利 要 求 书
1/2 页
1 .一种步态训练康复机器人,其结构至少包括床身(1)、减重固定机构(2)、下肢外骨骼 (3) 、底架 (4) 、电 动推杆 (5) 、连接臂 (6) 、髋部调节结构 (7) 、床身骨架 (8) 、臀部坐板 (9) 、连 接杆 (10) 、支撑杆件(12) 、扶手(37) 、急停开关 (38) ,其特征在于 :
2
CN 109771214 A
权 利 要 求 书
2/2 页
构至少包括大腿托锁紧块(19)、大腿腿托杆(20)、大腿托(21) ;所述大腿托锁紧块(19)中间 开有滑槽,大腿托锁紧块(19)安装在大腿杆(22)上并沿着大腿杆(22)来回移动,实现支撑 不同 身高 患者的大腿功能 ;所述大腿腿托杆 (20)的一端固定在大腿托锁紧块 (19) 上 ,大腿 腿托杆(20)的另一端和大腿托(21)滑动连接;所述大腿托(21)下部开有U型槽,大腿托(21) 在大腿腿托杆(20)上来回移动,可根据不用患者腿型对大腿托(21)与大腿杆(22)之间的距 离进行调节。