椭圆拟合算法实现
一种新的椭圆拟合算法的实现及应用
一种新的椭圆拟合算法的实现及应用作者:张慧芬等来源:《中国科技博览》2015年第07期[摘要]本文实现了一种基于代数、几何距离和RANSAC算法的最小平方中值的椭圆拟合的方法。
方法采用由粗到精的方法对数据进行过滤,并通过优化方法拟合出最终的椭圆。
实际图像的拟合结果表明,拟合效果具有良好的准确性和鲁棒性。
[关键词]椭圆拟合几何距离平方中值中图分类号:TB7 文献标识码:A 文章编号:1009-914X(2015)07-0222-011. 引言在图像的识别和分割中,基于形状的分析是非常重要的一种方法。
椭圆作为一个重要的形状特征,在现实生活中广泛存在[9-11]。
常用的椭圆拟合方法[1-8]包括:基于代数距离最小的方法、基于几何距离最小的方法和基于RANSAC的算法。
基于代数距离最小的方法算法简单,抗噪能力差。
基于几何距离最小的方法更准确,但是它对噪声比较敏感。
基于RANSAC的算法优点是它能鲁棒的估计模型参数,但是它没有迭代次数的上限,因此,其计算复杂度具有随机性。
本文针对以上问题,结合了三种椭圆拟合方法优点并做了改进,实现了一种基于代数距离的最小平方中值椭圆拟合改进算法。
方法首先进行重心平移、滤波除噪等预处理,然后由五边形的方法和RANSAC方法得到初步的椭圆参数,最后用代数距离和几何距离的方法进行检测,并求得最终拟合的椭圆。
实验结果表明,在仿真过程中,算法复杂度较小,能够在边界模糊和不规则的情况下较快速地拟合出精确的椭圆边界,方便识别,具有良好的鲁棒性和准确性。
2.算法步骤本文实现的基于代数距离的最小平方中值椭圆拟合改进算法在寻找初始点的时候,采用RANSAC方法,以此来分类正确数据和错误数据。
修正完椭圆系数后,通过五边形的方法对选取的点进行筛选,保证五个点尽量分开分布,增加了RANSAC算法处理数据的准确性。
确定参数之后,采用最小平方中值方法,去除偏差较大的点。
通过代入额外检测点,来判断椭圆是否满足要求。
matlab拟合椭圆函数
matlab拟合椭圆函数MATLAB是一个高效的数学分析工具,广泛应用于各个领域。
其中,拟合椭圆函数是MATLAB的一个重要应用之一。
椭圆函数拟合在数学、物理、工程等领域有着广泛的应用。
在MATLAB中,椭圆函数拟合可以通过调用现有的函数实现。
下面,我们来介绍如何在MATLAB中拟合椭圆函数。
在MATLAB中,我们可以使用fit函数来进行椭圆函数的拟合。
fit函数需要给出拟合模型的类型,以及数据点的横纵坐标信息。
在此基础上,fit函数会返回拟合函数表达式的参数值。
具体拟合过程如下:首先,需要准备一组椭圆形状的数据来进行拟合。
这些数据可以通过手动测量或者其他方式产生。
然后,将这些数据输入到MATLAB中,并使用plot函数可视化出这组数据。
接下来,我们需要定义椭圆函数的数学模型。
在MATLAB中,椭圆可以被表示为如下的方程:x2/a2+y2/b2=1其中,a和b分别代表椭圆的半长轴和半短轴,x和y分别代表椭圆上的点坐标。
这个方程可以被进一步简化为:y = f(x)其中,f(x)可以是一个任意的函数表达式,用来表示椭圆的形状。
在MATLAB中,我们可以使用polyfit函数或者lsqcurvefit函数通过最小二乘法来拟合函数并计算出f(x)的系数。
最后,我们将f(x)的系数插入到方程中,就可以得到完整的椭圆函数。
在MATLAB中,可以使用ezplot函数将拟合函数可视化。
此时,我们就可以直观地看到拟合函数和原始数据点的相似度。
综上所述,MATLAB拟合椭圆函数是一个重要的数学工具,在各个领域都有着广泛的应用。
通过了解上述步骤,我们可以清晰地了解到如何在MATLAB中拟合椭圆函数。
matlab最小二乘法拟合椭圆
matlab最小二乘法拟合椭圆在MATLAB中使用最小二乘法拟合椭圆的方法如下:1. 假设我们有一组二维点的坐标数据,可以表示为 (x, y)。
我们的目标是找到一个椭圆方程来最好地拟合这些点。
2. 根据椭圆的标准方程,我们可以将椭圆表示为 Ax^2 + Bxy + Cy^2 + Dx + Ey + F = 0 的形式。
其中 A、B、C、D、E 和 F 是椭圆的参数,需要确定。
3. 我们可以将这个问题转化为一个最小二乘问题,通过找到参数 A、B、C、D、E 和 F,使得该方程对每个数据点 (x, y) 的误差最小化。
4. 在MATLAB中,可以使用 lsqnonlin 函数来解决最小二乘问题。
首先,定义一个误差函数,即方程 Ax^2 + Bxy + Cy^2 + Dx + Ey + F 的值与点 (x, y) 之间的距离差的平方之和。
5. 然后,使用 lsqnonlin 函数来最小化误差函数并找到最佳的参数 A、B、C、D、E 和 F。
以下是一个使用最小二乘法拟合椭圆的示例代码:```matlabfunction error = ellipseFit(params, x, y)A = params(1);B = params(2);C = params(3);D = params(4);E = params(5);F = params(6);error = A * x.^2 + B * x.*y + C * y.^2 + D * x + E * y + F;endx = [1, 2, 3, 4, 5]; % 输入数据点的 x 坐标y = [2, 4, 5, 6, 7]; % 输入数据点的 y 坐标params0 = [1, 1, 1, 1, 1, 1]; % 初始参数猜测值% 使用 lsqnonlin 函数求解最小二乘问题params = lsqnonlin(@(params)ellipseFit(params, x, y),params0);A = params(1);B = params(2);C = params(3);D = params(4);E = params(5);F = params(6);disp(['椭圆方程: ', num2str(A), 'x^2 + ', num2str(B),'xy + ', num2str(C), 'y^2 + ', num2str(D), 'x + ', num2str(E), 'y + ', num2str(F), ' = 0']);```这段代码根据输入的数据点坐标进行最小二乘拟合,得到椭圆方程的参数,并打印出椭圆方程。
cv椭圆拟合算法
cv椭圆拟合算法摘要:一、椭圆拟合算法简介二、MATLAB中椭圆拟合的具体实现1.椭圆拟合函数2.参数设置与优化3.示例与分析三、椭圆拟合算法的应用领域四、总结与展望正文:一、椭圆拟合算法简介椭圆拟合算法是一种广泛应用于图像处理、物理实验和工程测量等领域的非线性拟合方法。
它的基本目标是通过一定的数学模型,将实验或测量得到的一组数据映射到椭圆曲线上,从而得到椭圆的参数,如长轴、短轴、中心坐标等。
椭圆拟合算法有多种方法,如最小二乘法、Levenberg-Marquardt算法等。
二、MATLAB中椭圆拟合的具体实现1.椭圆拟合函数在MATLAB中,可以使用curve fitting工具箱进行椭圆拟合。
常用的椭圆拟合函数为:`fit`。
该函数可以实现非线性拟合,支持输入数据为坐标矩阵的形式。
2.参数设置与优化在进行椭圆拟合时,需要设置一些参数以优化拟合效果。
这些参数包括:- 拟合函数:设置为椭圆方程,如`ax^2 + by^2 + cx + dy + e = 0`;- 初始参数:设置椭圆的初始参数,如长轴、短轴、中心坐标等;- 拟合方法:选择拟合算法,如最小二乘法、Levenberg-Marquardt算法等;- 迭代次数:设置迭代次数,影响拟合速度和精度;- 误差容限:设置误差容限,影响拟合结果的可靠性。
3.示例与分析以下为一个简单的椭圆拟合示例:```matlab% 生成模拟数据x = 1:10;y = 2 + 3 * x + 0.1 * sqrt(x);% 进行椭圆拟合fit = fit(x, y, "a*x^2 + b*y^2 + c*x + d*y + e", "a", "b", "c", "d", "e");% 显示拟合结果disp(fit);```通过调整参数和迭代次数,可以得到较好的椭圆拟合结果。
椭圆拟合算法实现
椭圆拟合算法实现椭圆的⽬标函数:F(A,B,C,D,E)=XiGeMa(xi^2+A*xiyi+B*yi^2+C*xi+D*yi+E)^2分别对A,B,C,D,E求⼀阶偏导并令其等于0得到线性⽅程组:|A1B1C1D1E1||A|=|resul1||A2B2C2D2E2||B|=|resul2||A3B3C3D3E3||C|=|resul3||A4B4C4D4E4||D|=|resul4||A5B5C5D5E5||E|=|resul5|求得A,B,C,D,E.椭圆的五个参数:center.x=(2*B*C-A*D)/(A*A-4*B);center.y=(2*D-A*D)/(A*A-4*B);fenzi=2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);fenmu=(A*A-4*B)*(B-sqrt(A*A+(1-B)*(1-B))+1);femmu2=(A*A-4*B)*(B+sqrt(A*A+(1-B)*(1-B))+1);long=sqrt(fabs(fenzi/fenmu));short=sqrt(fabs(fenzi/femmu2));theta=atan(sqrt((center.x*center.x-center.y*center.y*B)/(center.x*center.x *B-center.y*center.y))+0.0001)*180/cv_pi;; vectorgetEllipsepar(vectorvec_point){vectorvec_result;double x3y1=0,x1y3=0,x2y2=0,yyy4=0,xxx3=0,xxx2=0,x2y1=0,yyy3=0,x1y2=0,yyy2= 0,x1y1=0,xxx1=0,yyy1=0;int N=vec_point.size();for(int m_i=0;m_i{double xi=vec_point[m_i].x;double yi=vec_point[m_i].y;x3y1+=xi*xi*xi*yi;x1y3+=xi*yi*yi*yi;x2y2+=xi*xi*yi*yi;;yyy4+=yi*yi*yi*yi;xxx3+=xi*xi*xi;xxx2+=xi*xi;x2y1+=xi*xi*yi;x1y2+=xi*yi*yi;yyy2+=yi*yi;x1y1+=xi*yi;xxx1+=xi;yyy1+=yi;yyy3+=yi*yi*yi;}long double resul1=-(x3y1);long double resul2=-(x2y2);long double resul3=-(xxx3);long double resul4=-(x2y1);long double resul5=-(xxx2);long double B1=x1y3,C1=x2y1,D1=x1y2,E1=x1y1,A1=x2y2; long double B2=yyy4,C2=x1y2,D2=yyy3,E2=yyy2,A2=x1y3; long double B3=x1y2,C3=xxx2,D3=x1y1,E3=xxx1,A3=x2y1; long double B4=yyy3,C4=x1y1,D4=yyy2,E4=yyy1,A4=x1y2; long double B5=yyy2,C5=xxx1,D5=yyy1,E5=N,A5=x1y1; // CvMat*Ma=cvCreateMat(5,5,CV_64FC1);CvMat*Md=cvCreateMat(5,1,CV_64FC1);CvMat*Mb=cvCreateMat(5,1,CV_64FC1);//cvmSet(Mb,0,0,resul1);cvmSet(Mb,1,0,resul2);cvmSet(Mb,2,0,resul3);cvmSet(Mb,3,0,resul4);cvmSet(Mb,4,0,resul5);cvmSet(Ma,0,0,A1);cvmSet(Ma,0,1,B1);cvmSet(Ma,0,2,C1);cvmSet(Ma,0,3,D1);cvmSet(Ma,0,4,E1);cvmSet(Ma,1,0,A2);cvmSet(Ma,1,1,B2);cvmSet(Ma,1,2,C2);cvmSet(Ma,1,3,D2);cvmSet(Ma,1,4,E2);cvmSet(Ma,2,0,A3);cvmSet(Ma,2,1,B3);cvmSet(Ma,2,2,C3);cvmSet(Ma,2,3,D3);cvmSet(Ma,2,4,E3);cvmSet(Ma,3,0,A4);cvmSet(Ma,3,1,B4);cvmSet(Ma,3,2,C4);cvmSet(Ma,3,3,D4);cvmSet(Ma,3,4,E4);cvmSet(Ma,4,0,A5);cvmSet(Ma,4,1,B5);cvmSet(Ma,4,2,C5);cvmSet(Ma,4,3,D5);cvmSet(Ma,4,4,E5);cvSolve(Ma,Mb,Md);long double A=cvmGet(Md,0,0);long double B=cvmGet(Md,1,0);long double C=cvmGet(Md,2,0);long double D=cvmGet(Md,3,0);long double E=cvmGet(Md,4,0);double XC=(2*B*C-A*D)/(A*A-4*B);double YC=(2*D-A*D)/(A*A-4*B);long double fenzi=2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);long double fenmu=(A*A-4*B)*(B-sqrt(A*A+(1-B)*(1-B))+1);long double femmu2=(A*A-4*B)*(B+sqrt(A*A+(1-B)*(1-B))+1);double XA=sqrt(fabs(fenzi/fenmu));double XB=sqrt(fabs(fenzi/femmu2));double Xtheta=atan(sqrt((XA*XA-XB*XB*B)/(XA*XA*B-XB*XB))+0.0001)*180/3.1415926; vec_result.push_back(XC);vec_result.push_back(YC);vec_result.push_back(XA);vec_result.push_back(XB);vec_result.push_back(Xtheta); return vec_result;}。
椭圆拟合算法
椭圆拟合算法椭圆拟合算法是一种经典的图像处理算法,用于从一组点中拟合出一条椭圆曲线。
椭圆拟合算法可以应用于许多不同类型的图像处理任务,以及机器视觉领域的许多研究。
本文的目的是介绍椭圆拟合算法的原理和实现方法,并给出实例,以便读者能够更好地理解该算法。
椭圆拟合算法是一种几何学算法,它的主要思想是将一组点根据给定范围内的曲线进行拟合。
由于椭圆曲线具有较好的特征,因此可以将它用于许多图像处理任务,如曲线拟合、曲线拟合和曲线表面重建等。
因此,椭圆拟合算法可以帮助集成系统获得更加准确和可靠的图像信息,以实现更加准确的结果。
椭圆拟合算法的基本原理是根据给定的点集,通过一系列的步骤来求解椭圆拟合算法的参数。
主要步骤包括:首先,确定点集的起始点和终止点;然后,根据给定的弦长度计算点的距离;最后,使用梯度下降算法求解待拟合圆的最优参数。
椭圆拟合算法的实现方法可以分为三种:最小二乘法、梯度下降法和最近点法。
最小二乘法是一种经典的算法,它根据拟合曲线所需要的点,使用最佳拟合方法来计算拟合曲线的参数;而梯度下降法是椭圆拟合算法的常用算法,它根据拟合曲线所需要的点,使用梯度下降算法来计算拟合曲线的参数;最后是最近点法,它根据拟合曲线所需要的点,通过最近点法来计算拟合曲线的参数。
为了演示椭圆拟合算法,我们可以使用Matlab编写程序。
假设我们有一组散点,如图1所示。
我们可以使用算法来拟合这组数据。
下面是使用Matlab编写的程序示例代码:x=[-4 -3 -2 -2 2 3 4];y=[3 2 -1 -2 0 -1 2];[x_curve,y_curve,a,b]=ellipsefit(x,y);plot(x_curve,y_curve)hold onplot(x,y,o其中,变量x和y分别表示点的x坐标和y坐标;函数ellipsefit 用于求解椭圆拟合参数,函数的输入参数为x坐标和y坐标,它的输出参数为拟合椭圆上的点的x坐标和y坐标,以及椭圆拟合参数a和b;最后,函数plot用于在图中画出拟合椭圆,plot(x,y,o用于绘制原始点。
最小二乘法拟合椭圆附带matlab程序
最小二乘法拟合椭圆设平面任意位置椭圆方程为:x 2 + Axy + By 2 + Cx + Dy + E = 0设 P i ( x i ,y i )( i = 1,2, ,N) 为椭圆轮廓上的 N( N ≥ 5 ) 个测量点, 依据最小二乘原理, 所拟合的目标函数为:N2F( A,B, C,D, E) = ∑ (x i2+ Ax i y i + By i 2+ Cx i + Dy i+ E)i=1欲使 F 为最小,需使F ?F?F ?F =?F?A===?D= 0?B?C?E由此可以得方程:∑ x i 2y i 2 ∑ x i y i 3∑ x i 2y i ∑ x i y i 2∑ x i y i∑ x i 3 y i34232A 2 2∑x i yi∑ y i∑x i yi∑ y i∑ y i∑ x i y i ∑ x i 2y∑ x i y2∑ x i3∑ x i y∑ x iB∑ x i 3iiC =-iD∑ x i y i2∑ y i 3∑ y i2∑ y i2 ∑ x i 2y i∑ x i y i[ E ][ ∑ x i y i∑ y i 2 ∑ x i ∑ y iN ] [ ∑ x i2]解方程可以得到A ,B ,C ,D ,E 的值。
根据椭圆的几何知识,可以计算出椭圆的五个参数:位置参数(θ,x 0, y 0 )以及形状参数( a, b) 。
x 0 =2BC-ADA 2 -4By 0 2D - A D=4BA 2-(2 - D 2 + 4BE- A 2 )a = √ 2- 4B) (B - 2B 2)+ 1)( A √A + (1-2 ( ACD -2 -D 2+ 4BE- A 2 )b = √ 2- 4B) (B + 2(1 - B 2)+ 1)( A √A +θ= tan-1√a 2 - b 2Ba 2 B -b 2附: MATLAB程序function [semimajor_axis, semiminor_axis, x0, y0, phi] = ellipse_fit(x, y)%%Input:%x —— a vector of x measurements%y —— a vector of y measurements%%Output:%semimajor_axis —— Magnitude of ellipse longer axis%semiminor_axis —— Magnitude of ellipse shorter axis%x0 —— x coordinate of ellipse center%y0 —— y coordinate of ellipse center%phi—— Angle of rotation in radians with respect to x-axis%%explain%2*b'*x*y + c'*y^2 + 2*d'*x + 2*f'*y + g' = -x^2%M * p = b M = [2*x*y y^2 2*x 2*y ones(size(x))],% p = [b c d e f g] b = -x^2.%p = pseudoinverse(M) * b.x = x(:);y = y(:);%Construct MM = [2*x.*y y.^2 2*x 2*y ones(size(x))];%Multiply (-X.^2) by pseudoinverse(M)e = M\(-x.^2);%Extract parameters from vector ea = 1;b = e(1);c = e(2);d = e(3);f = e(4);g = e(5);%Use Formulas from Mathworld to find semimajor_axis, semiminor_axis, x0, y0, and phidelta = b^2-a*c;x0 = (c*d - b*f)/delta;y0 = (a*f - b*d)/delta;phi = 0.5 * acot((c-a)/(2*b));nom = 2 * (a*f^2 + c*d^2 + g*b^2 - 2*b*d*f - a*c*g);s = sqrt(1 + (4*b^2)/(a-c)^2);a_prime = sqrt(nom/(delta* ( (c-a)*s -(c+a))));b_prime = sqrt(nom/(delta* ( (a-c)*s -(c+a))));semimajor_axis = max(a_prime, b_prime); semiminor_axis = min(a_prime, b_prime); if(a_prime < b_prime)phi = pi/2 - phi;end。
基于莱特准则的椭圆拟合优化算法
果易受误 差点影响 , 拟合不准确 。针对此特性 , 提 出了一种基 于莱特准则 的椭 圆拟合优 化算 法。首先 , 由代数距 离最 小的 L s法对待拟 合曲线进 行椭圆拟合 ; 其 次, 将待 拟合曲线上的点与 I 5 法拟合的椭 圆的代数距 离作 为样本点 集 , 在
验证 该样 本点集服从 正态分布的情况下 , 采 用莱特 准则, 将样本点 中值 大于 l 3 t r f的点判定 为野值并 剔除 , 进行 多次 拟合 , 直 至样本点 中无野值 ; 最后 , 得到椭 圆最优拟合 结果 。仿 真 实验 结果表 明 , 优 化算 法的拟合 误 差在 1 . O % 以下 , 相 比 同条件 下的 L S法, 其拟 合精 度至少提 高2个百分点。优化 算法的仿真结果与其在香烟 圆度在 线检 测 中的 实际应
基 于莱 特 准 则 的椭 圆拟 合 优 化 算 法
曹俊丽 , 李居峰
( 上海大学 机 电工程与 自动化学院, 上海 2 0 0 0 7 2 ) ( 通信作者电子邮箱 c a o j u n l i l O 0 9 @1 6 3 . c o m)
摘
要: 普遍使用 的代数距 离最小的最小二乘 ( L S ) 椭 圆拟 合算 法简单 、 易实现 , 但 对样本 点无 选择 , 导致拟 合结
a n d e a s y t o i mp l e me n t ,b u t i t h a s n o c h o i c e t o t h e s a mp l e p o i n t s ,wh i c h l e a d s t o t h e i f t t i n g r e s u h s a r e e a s i l y i n a c c u r a t e d u e t o t h e e r r o r p o i n t s . Ac c o r d i n g t o t h i s c a s e ,a l l i mp r o v e d e l l i p s e i f t t i n g a lg o it r h m b a s e d o n L e t t s c it r e i r o n wa s p r o p o s e d t o o v e r c o me t h e s h o a a g e o f L S lg a o r i t h m. F i r s t l y .t h e e l l i p s e wa s i f t t e d f r o m t h e i f t t i n g c u r v e b y u s i n g t h e L S e l l i p s e i f t t i n g lg a o i r t h m b a s e d o n mi n i mu m a l g e b r a i c d i s t a n c e .T h e n ,t h e lg a e b r a i c d i s t a n c e o f e l l i p s e i f t t e d b y L S a l g o it r h m f r o m t h e p o i n t d i s t a n c e o n t h e i f t t i n g c u r v e wa s s e t a s t h e i f t t i n g p o i n t s e t .Af t e r t h e oi p n t s e t wa s v e i r i f e d t o b e n o r ma l d i s t i r b u t i o n ,t h e p o i n t s w h i c h we r e g r e a t e r t h a n I 3 o r l we r e d e t e r mi n e d t o b e o u t l i e r s a n d e l i mi n a t e d b y u s i n g L e t t s c it r e i r o n .T h e n t h e s t e p s a b o v e
matlab中 二维散点椭圆拟合
一、概述在实际的数据处理和分析过程中,常常需要对数据进行拟合和建模,以便更好地描述数据的特征和规律。
而对于二维散点数据,椭圆拟合是一种常见且有效的方法。
在MATLAB中,提供了丰富的工具和函数,可以方便地进行二维散点数据的椭圆拟合。
二、数据准备在进行二维散点椭圆拟合之前,首先需要准备相应的数据。
通常情况下,这些数据可能是从实验或观测中得到的,或者是通过其他手段获取的。
假设我们有一组二维散点数据,可以将其表示为一个二维数组或矩阵。
三、椭圆参数估计在MATLAB中,可以利用curve fitting工具箱中的相应函数来进行椭圆参数的估计和拟合。
针对二维散点数据,通常需要估计椭圆的中心坐标、长轴长度、短轴长度、倾斜角等参数。
利用最小二乘法或其他优化算法,可以得到这些参数的最优估计值。
四、椭圆拟合算法MATLAB中提供了多种椭圆拟合的算法和函数,例如lsqellipfit、ellipfit等。
这些函数可以方便地对二维散点数据进行椭圆拟合,并得到拟合的椭圆参数。
用户可以根据实际需求和数据特点选择合适的算法,进行椭圆拟合分析。
五、拟合结果评估在得到椭圆拟合的结果之后,需要对拟合效果进行评估。
通常可以通过计算残差和拟合优度等指标来评价拟合效果。
如果残差较小、拟合优度较高,则说明拟合效果较好。
否则,可能需要进一步调整拟合参数或选择其他算法进行拟合。
六、结果可视化可以利用MATLAB的绘图函数对椭圆拟合结果进行可视化展示。
可以将原始二维散点数据和拟合的椭圆同时绘制在同一张图上,以便直观地观察拟合效果。
也可以将椭圆参数和拟合结果输出为图表或报告,进行进一步分析和应用。
七、实例分析下面通过一个简单的实例来演示在MATLAB中如何进行二维散点椭圆拟合。
假设我们有一组二维散点数据,需要对其进行椭圆拟合分析。
```matlab生成示例数据x = randn(100,1);y = randn(100,1);绘制散点图scatter(x,y);二维散点椭圆拟合[center, radii, evecs, v] = fit_ellipse(x, y);绘制拟合椭圆hold on;fit_ellipse(center, radii, evecs, v);hold off;```通过以上实例,我们可以看到如何利用MATLAB进行二维散点椭圆拟合分析,通过fit_ellipse函数得到拟合的椭圆参数,并将结果可视化展示出来。
椭偏数据拟合
椭偏数据拟合椭偏数据拟合是指通过拟合椭圆模型来逼近实际测量数据的一种方法。
椭偏数据拟合在许多领域具有广泛的应用,如图像处理、计算机视觉、数据分析等。
本文将详细介绍椭偏数据拟合的原理、方法以及它在实际应用中的意义。
首先,让我们来了解一下椭圆模型。
椭圆由一个长轴和一个短轴组成,可以通过两个参数来描述,即椭圆的中心和轴的长度。
在椭偏数据拟合中,我们的目标是通过最小化残差来确定这些参数,使得拟合的椭圆能够最好地逼近实际数据。
在进行椭偏数据拟合之前,我们需要首先收集实际测量数据。
这些数据可以来自于各种测量仪器或传感器,如光学测量、雷达测距、超声波测量等。
这些数据可能包含一些噪声和误差,因此我们需要对其进行预处理,以提取有效的信息。
接下来,我们需要选择适当的拟合方法。
常见的椭偏数据拟合方法有最小二乘法、极大似然估计等。
最小二乘法是一种常见的拟合方法,它通过最小化实际数据与拟合曲线之间的残差平方和来确定拟合参数。
而极大似然估计则是一种基于统计理论的拟合方法,它通过最大化似然函数来确定拟合参数,使得实际数据在给定模型下的概率最大化。
在进行拟合之前,我们需要建立起拟合模型。
对于椭偏数据拟合来说,我们可以使用椭圆方程作为拟合模型。
椭圆方程可以写作(x -a)^2 / a^2 + (y - b)^2 / b^2 = 1,其中a和b分别为椭圆的半长轴和半短轴,(x, y)为数据点的坐标。
我们的目标是通过确定a和b来最好地逼近实际数据。
在进行参数确定之后,我们可以根据拟合结果进行一些实际应用。
例如,在图像处理中,我们可以利用椭偏数据拟合方法来寻找图像中的椭圆轮廓,进而进行目标跟踪和形状分析。
在计算机视觉中,我们可以利用椭偏数据拟合方法来进行物体检测和识别。
此外,椭偏数据拟合还可以用于雷达信号处理、超声波检测等领域。
总之,椭偏数据拟合是一种重要的数据处理方法,它可以通过拟合椭圆模型来逼近实际测量数据。
在实际应用中,椭偏数据拟合可以帮助我们提取有效的信息,进行目标跟踪、形状分析、物体检测等任务。
python 拟合椭圆

python 拟合椭圆要拟合椭圆,可以使用scipy库中的optimize.curve_fit函数来拟合椭圆参数。
下面是一个拟合椭圆的示例代码:```pythonimport numpy as npimport matplotlib.pyplot as pltfrom scipy import optimizedef ellipse(x, xc, yc, a, b, theta):"""椭圆方程"""x, y = x[0], x[1]term1 = ((x - xc) * np.cos(theta) + (y - yc) * np.sin(theta))**2 / a**2term2 = ((x - xc) * np.sin(theta) - (y - yc) * np.cos(theta))**2 / b**2return term1 + term2# 生成椭圆数据t = np.linspace(0, 2*np.pi, 100)x = 3 * np.cos(t)y = 2 * np.sin(t)# 添加噪声x_noise = x + np.random.normal(0, 0.1, len(x))y_noise = y + np.random.normal(0, 0.1, len(y))# 初始猜测参数params0 = [0, 0, 1, 1, 0]# 拟合椭圆params, params_covariance = optimize.curve_fit(ellipse, [x_noise, y_noise], 1, params0)xc, yc, a, b, theta = params# 绘制结果plt.scatter(x_noise, y_noise, label='data')plt.plot(xc + a * np.cos(t) * np.cos(theta) - b * np.sin(t) *np.sin(theta),yc + a * np.cos(t) * np.sin(theta) + b * np.sin(t) *np.cos(theta),c='r', label='fit')plt.legend()plt.axis('equal')plt.show()```上述代码中,首先定义了一个椭圆方程`ellipse`,接着生成了一个椭圆数据并添加了噪声。
opencvpython拟合的椭圆的拟合系数
OpenCV Python拟合的椭圆的拟合系数引言椭圆是数学中的一种特殊曲线,它在计算机视觉领域中具有广泛的应用。
OpenCV 是一个开源的计算机视觉库,其中包含了许多用于图像处理和分析的函数和算法。
在本文中,我们将探讨如何使用OpenCV Python来拟合椭圆,并了解拟合系数的含义和用途。
什么是椭圆拟合椭圆拟合是指通过一组离散的点,找到与这些点最匹配的椭圆曲线。
在计算机视觉中,椭圆拟合常用于目标检测和形状分析。
通过拟合椭圆,我们可以获得椭圆的中心位置、长轴和短轴长度、横纵轴的方向等信息。
椭圆拟合的方法OpenCV提供了两种方法来进行椭圆拟合:直接拟合和最小二乘拟合。
1. 直接拟合法直接拟合法是基于Hough变换的一种方法。
它通过对图像中的边缘进行霍夫变换,将边缘点的坐标转换为椭圆参数空间上的投票。
然后通过统计投票数最多的参数,得到椭圆的拟合结果。
直接拟合法的优点是速度快,适用于对边缘清晰的图像进行拟合。
2. 最小二乘拟合法最小二乘拟合法是通过最小化残差来求解椭圆拟合问题。
它通过最小化所有数据点到拟合椭圆的距离平方和来优化椭圆参数。
最小二乘拟合法的优点是可以处理含有噪声的图像,但速度相对较慢。
使用OpenCV Python进行椭圆拟合在本节中,我们将介绍使用OpenCV Python进行椭圆拟合的基本步骤和代码示例。
步骤1:导入库和模块首先,我们需要导入必要的库和模块,包括OpenCV和NumPy。
可以使用pip命令来安装相应的库。
import cv2import numpy as np步骤2:读取图像接下来,我们需要读取一幅图像,并将其转换为灰度图像。
可以使用OpenCV的cv2.imread()函数来读取图像,并使用cv2.cvtColor()函数将图像转换为灰度图像。
image = cv2.imread('image.jpg')gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)步骤3:图像处理在进行椭圆拟合之前,通常需要对图像进行一些预处理,以提高拟合的准确性。
scipy 最小二乘法拟合椭圆

scipy最小二乘法拟合椭圆椭圆曲线在数学和几何学中起着重要的作用,它具有许多特殊的性质和应用。
本文将介绍如何使用Scipy中的最小二乘法来拟合椭圆曲线,以便更好地理解和应用椭圆。
首先,让我们快速回顾一下最小二乘法。
最小二乘法是一种常见的数值分析方法,用于找到一条曲线或者函数,使该曲线与给定的一组数据点之间的误差最小化。
对于椭圆曲线,我们希望找到椭圆的参数,使其与给定的一组离散数据点最好地拟合。
在Scipy中,我们可以使用optimize.curve_fit()函数来进行最小二乘法拟合。
该函数可以拟合任意的模型函数,并返回最佳拟合参数。
由于椭圆曲线的方程比较复杂,我们需要自己定义一个模型函数来进行拟合。
假设我们已经有一组椭圆曲线上的数据点(x,y),我们可以将椭圆方程表示为:x=a*cos(θ)y=b*sin(θ)其中,a和b分别是椭圆的两个坐标轴的长度,θ是椭圆上的角度。
我们的目标是找到最优的a和b,使得上述方程与给定的数据点最好地拟合。
接下来,我们定义一个模型函数ellipse_func(),该函数接受输入参数θ和待拟合参数a、b,并返回对应的椭圆上的坐标点(x,y)。
```pythonimport numpy as npdef ellipse_func(θ,a,b):x=a*np.cos(θ)y=b*np.sin(θ)return x,y然后,我们可以使用optimize.curve_fit()函数进行拟合。
该函数需要传入模型函数、待拟合参数的初始值以及数据点,然后返回最佳拟合参数和协方差矩阵。
```pythonfrom scipy import optimizeθ=np.linspace(0,2*np.pi,100)x=3*np.cos(θ)+0.5*np.random.randn(100)y=5*np.sin(θ)+0.5*np.random.randn(100)popt,pcov=optimize.curve_fit(ellipse_func,θ,[x,y], p0=[2,4])在上述代码中,我们首先生成了一组椭圆上的随机数据点(x, y),然后调用optimize.curve_fit()函数进行拟合。
椭圆拟合以及图像扶正

拟合椭圆更一般就是对圆锥曲线拟合,椭圆、双曲线、抛物线区在方程中区别在于偏心率同“1”的比较。
下文对于椭圆的拟合,可以更一般的推广到其它圆锥曲线的拟合中去。
在二维平面xy 坐标系中有一离散的点集()i i y x p ,,i =0,1,2,3…n-1,这n 个点分布在椭圆曲线方程()()i i y x O y x f ,1,±=上,其中()i i y x O ,为点与拟合的期望方程()1,=y x f 的偏差。
在xy 坐标系中,椭圆方程的基本形式是:122=++++Ey Dx Cxy By Ax 。
证明如下:圆锥曲线上的每一点()i i y x p ,与曲线外的某点()y x p ,1的距离,与其到某直线l :0'''=++C y B x A 的距离之比为常数λ,偏心率的大小也就决定了圆锥曲线的类型。
那么有:()()λ=+++-2'2''''1,,B A Cy B x A y x p y x p i i i i ;等价 ()()()02'''2'2'222=+++--+-C y B x A BA y y x x i i λ;所以圆锥曲线满足形式:122=++++Ey Dx Cxy By Ax 。
证毕 曲线的拟合方程的原则是:()1,=y x f → ()}{2,min∑iiy x O 。
2i x ,2i y ,i i y x ,i x ,i y 之间线性无关,所以可以使问题转化为最小二乘线性拟合问题,如下:5⨯n M =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------1111212100002020n n n n n n y x y x y x y x y x y x; T X 51⨯=[]E D C B A;Tn Y ⨯1=[]11 ; 有:()()(){}Y X M Y X M E y x O Ti i -**-*=∑2,;为了得到系数矩阵X ,使得曲线方程()1,=y x f → ()}{2,min∑iiy x O ,对期望求导,得到最小二乘的矩阵表达式:Y M X M M TT*=**,点集的数量n 大于5时,得到矩阵Y X M -*以2范数为距离度量规则的最小解。
opencv 拟合椭圆 指定角度
OpenCV拟合椭圆指定角度1. 介绍在计算机视觉和图像处理中,椭圆是一种常见的几何形状。
通过使用OpenCV库,我们可以实现拟合椭圆并指定其角度的功能。
本文将详细介绍如何使用OpenCV库来实现这个任务。
2. 拟合椭圆2.1 OpenCV简介OpenCV是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉算法。
它支持多种编程语言,包括C++、Python等。
对于图像处理任务,OpenCV提供了很多方便易用的函数和方法。
2.2 椭圆拟合原理在拟合椭圆之前,我们需要先理解椭圆的数学定义和参数表示。
在笛卡尔坐标系中,一个椭圆可以由以下参数表示:•中心点坐标 (cx, cy)•长轴长度 a•短轴长度 b•椭圆旋转角度 theta(弧度制)给定一组离散点集合P = {(x1, y1), (x2, y2), …, (xn, yn)},我们希望找到一个最优的椭圆参数集合 (cx, cy, a, b, theta),使得这个椭圆能够最好地拟合这些离散点。
OpenCV提供了一个函数fitEllipse()来实现椭圆拟合。
该函数使用了一种基于最小二乘法的优化算法,通过迭代计算得到最优的椭圆参数。
2.3 OpenCV中的椭圆拟合在OpenCV中,我们可以使用fitEllipse()函数来实现椭圆拟合。
该函数的原型如下:retval = cv.fitEllipse(points)其中,points是输入的离散点集合,retval是返回的椭圆参数集合。
以下是一个简单的示例代码,演示了如何使用OpenCV进行椭圆拟合:import cv2 as cvimport numpy as np# 创建一个空白图像image = np.zeros((500, 500), dtype=np.uint8)# 生成一组离散点作为示例输入points = np.array([(250 + int(200 * np.cos(t)), 250 + int(100 * np.sin(t))) fo r t in np.linspace(0, 2*np.pi, 100)], dtype=np.int32)# 拟合椭圆ellipse = cv.fitEllipse(points)# 在图像上绘制拟合结果cv.ellipse(image, ellipse, (255,), 2)# 显示图像cv.imshow("Fit Ellipse", image)cv.waitKey(0)cv.destroyAllWindows()运行上述代码,你将会得到一个显示了拟合椭圆的图像窗口。
matlab椭圆拟合 -回复
matlab椭圆拟合-回复其中padding为matlab中常用的椭圆拟合函数,其实现了对图像中椭圆形状的拟合。
本文将以padding函数为例,介绍matlab中椭圆拟合的基本原理和步骤,并给出相关的实例和代码。
希望通过本文的介绍,读者能够更好地了解和掌握matlab中椭圆拟合的方法与技巧。
首先,我们来了解一下什么是椭圆拟合。
在图像处理中,有时需要对图像中的椭圆形状进行拟合,以实现不同的应用需求。
椭圆拟合即是通过对一组离散点进行处理,得到最逼近这些点的一个椭圆。
在拟合的过程中,通常会定义拟合的误差函数,通过优化该误差函数来得到最佳的拟合椭圆。
在matlab中,可以使用padding函数实现椭圆拟合。
padding函数使用了非线性最小二乘法进行拟合,具有较高的拟合精度。
该函数可以直接使用matlab自带的curve fitting toolbox进行安装和调用。
在使用padding函数之前,需要准备一组待拟合的数据点。
接下来,我们将详细介绍padding函数的使用步骤。
首先,需要准备一组待拟合的数据点。
这些数据点可以是图像中提取出的椭圆轮廓点,也可以是其他实验或仿真数据。
在准备好数据点之后,即可通过padding 函数进行椭圆拟合。
Step 1:安装padding函数和curve fitting toolbox。
首先需要确保matlab上已经安装了curve fitting toolbox。
可以通过在matlab命令窗口中输入"ver"命令查看已安装的工具箱。
如果没有安装curve fitting toolbox,可以通过matlab官方网站下载并安装。
Step 2:准备待拟合的数据点。
假设我们已经有一组数据点[x, y],它们均属于同一个椭圆形状。
Step 3:调用padding函数。
在matlab命令窗口中输入以下代码:matlabx = [1, 2, 3, 4, 5]; 待拟合点的x坐标y = [1, 3, 4, 2, 5]; 待拟合点的y坐标建立一个用于拟合的ellipse对象ellipse = fitellipse(x, y);可以通过ellipse对象得到拟合的椭圆参数a = ellipse.a; 椭圆长轴b = ellipse.b; 椭圆短轴xc = ellipse.X0; 椭圆中心x坐标yc = ellipse.Y0; 椭圆中心y坐标phi = ellipse.phi; 椭圆旋转角度(弧度制)通过以上代码,就可以得到拟合后的椭圆参数以及椭圆的位置和方向。
DXF文件的椭圆(弧)曲线拟合算法的设计与实现
DXF文件的椭圆(弧)曲线拟合算法的设计与实现杨泽林;马凯;吕静【摘要】现有的基于微机开发的数控加工系统都是人工调试完成后加载运行的.为了能够依据AutoCAD绘图系统提供的信息自动生成数控加工代码,对基于PMAC 卡的数控加工代码生成以及动态在线监测系统研制过程中遇到的问题进行了研究.重点说明了如何利用DXF文件中的参数进行椭圆(弧)曲线拟合,详细介绍了椭圆(弧)曲线拟合算法的实现.比较结果进一步验证了该算法的正确性和有效性,为后续的工作奠定了基础.%The existing microprocessor-based NC systems are loaded for operation after manually debugging. In order to automatically generate numerical control codes in accordance with the information from AutoCAD system, the NC codes generation based on PMAC and the issues of development of dynamic on-line monitoring are researched. The ellipse (arc) curves fitting by adopting parameters in DXF file are emphasized, and the implementation of ellipse ( arc) curve fitting algorithm is introduced in detail. The result of the method is compared with original graphic, and the correctness and effectiveness of the algorithm are verified, this lays a foundation for follow-up works.【期刊名称】《自动化仪表》【年(卷),期】2011(032)011【总页数】4页(P13-16)【关键词】在线监测;接口程序;拟合算法;数控系统;Visual C++【作者】杨泽林;马凯;吕静【作者单位】宁夏大学物理电气信息学院,宁夏银川750021;宁夏大学物理电气信息学院,宁夏银川750021;宁夏大学物理电气信息学院,宁夏银川750021【正文语种】中文【中图分类】TH1220 引言现有的基于可编程多轴运动控制卡(programmable multi-axis controller,PMAC)开发实现的数控系统,都是在离线状态下人工调试计算机数控(computer numerical control,CNC)代码后保存在计算机的外存储器。
椭圆的拟合
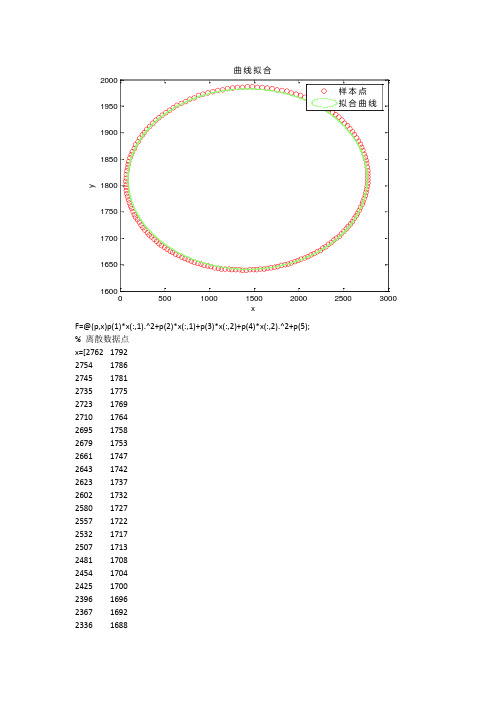
F=@(p,x)p(1)*x(:,1).^2+p(2)*x(:,1)+p(3)*x(:,2)+p(4)*x(:,2).^2+p(5); % 离散数据点x=[2762 17922754 17862745 178127351775 27231769 27101764 26951758 26791753 26611747 26431742 26231737 26021732 25801727 25571722 25321717 25071713 24811708 24541704 24251700 23961696 23671692 2336 1688050010001500200025003000160016501700175018001850190019502000x y 曲线拟合2305 1684 2273 1681 2240 1677 2207 1674 2173 1671 2138 1668 2103 1665 2068 1663 2032 1660 1995 1658 1959 1655 1921 1653 1884 1651 1846 1650 1807 1648 1769 1646 1730 1645 1691 1644 1652 1643 1613 1642 1573 1641 1534 1640 1494 1640 1454 1640 1415 1639 1375 1639 1336 1640 1296 1640 1256 1640 1217 1641 1178 1641 1139 1642 1100 1643 1061 1644 1023 1646 985 1647 947 1649 910 1651 873 1652 836 1654 800 1657 764 1659 729 1661 694 1664626 1670 593 1673 561 1676 529 1679 499 1683 468 1686 439 1690 410 1694 383 1698 356 1702 330 1706 305 1711 281 1715 259 1720 237 1725 216 1730 197 1735 179 1740 162 1745 146 1750 132 1756 119 1761 107 1767 97 1773 89 1778 82 1784 76 1790 72 1796 70 180269 180870 1814 73 1821 77 1827 84 1833 92 1839 102 1845 113 1852 127 1858 143 1864 160 1870 179 1877 201 1883 224 1889276 1900 304 1906 335 1912 367 1917 401 1923 438 1928 475 1933 514 1938 555 1942 598 1947 642 1951 687 1955 734 1959 782 1963 832 1966 882 1970 933 1972 986 1975 1039 1977 1093 1979 1148 1981 1203 1983 1259 1984 1315 1985 1371 1985 1427 1986 1484 1986 1540 1985 1596 1985 1652 1984 1707 1983 1761 1981 1815 1980 1868 1978 1921 1975 1972 1973 2022 1970 2072 1967 2120 1963 2166 1960 2212 1956 2255 1952 2297 19482339 19432378 19382415 19342450 19292484 19232516 19182547 19132575 19072602 19012626 18962649 18902670 18842689 18782706 18722722 18662735 18592746 18532756 18472764 18412770 18352774 18282776 18222777 18162776 18102773 18042769 1798];p0=[0.005 0.005 0.005 0.005 0.005];warning off% 拟合系数,最小二乘方法p=nlinfit(x,zeros(size(x,1),1),F,p0);plot(x(:,1),x(:,2),'ro');hold on;xmin=min(x(:,1));xmax=max(x(:,1));ymin=min(x(:,2));ymax=max(x(:,2));% 作图ezplot(@(x,y)F(p,[x,y]),[-1+xmin,1+xmax,-1+ymin,1+ymax]); title('曲线拟合');legend('样本点','拟合曲线')F=@(p,x)p(1)*x(:,1).^2+p(2)*x(:,1)+p(3)*x(:,2)+p(4)*x(:,2).^2+p(5); % 离散数据点x=[2737 2142727 2172715220 2701224 2687227 2671231 2653234 2635237 2615240 2594243 2572246 2549249 2525252 2500255 2474257 2447260 2419262 2390265 2360267 2330269 2299 27105001000150020002500300050100150200250300x y曲线拟合2267 274 2235 275 2202 277 2168 279 2134 281 2099 283 2064 284 2028 285 1992 287 1955 288 1918 289 1881 290 1843 291 1805 292 1767 293 1728 294 1690 294 1651 295 1612 295 1573 296 1533 296 1494 296 1455 296 1415 296 1376 296 1337 296 1297 296 1258 295 1219 295 1180 294 1141 293 1103 293 1064 292 1026 291 988 290 951 289 914 288 877 286 841 285 805 283 769 282 734 280 700 278 666 277600 273 568 271 536 268 506 266 476 264 447 261 418 259 391 256 364 254 339 251 314 248 291 245 268 242 247 239 227 236 207 233 190 230 173 226 158 223 144 219 131 216 120 212 110 209 102 205 95 202 90 198 86 194 84 190 83 187 85 183 88 179 92 175 99 171 107 167 117 164 129 160 143 156 158 152 176 148 195 145 217 141 240 137 265 134320 127 351 123 383 120 417 117 453 114 490 110 529 108 570 105 612 102 656 100 701 97747 95795 93844 91893 89944 87996 86 1049 85 1103 84 1157 83 1211 82 1267 81 1322 81 1378 81 1434 81 1489 81 1545 81 1600 82 1655 83 1710 83 1764 84 1817 86 1870 87 1922 89 1973 91 2023 92 2071 95 2119 97 2165 99 2210 102 2253 104 2295 107 2336 1102374 1132412 1162447 1192480 1232512 1262542 1302570 1332596 1372621 1402643 1442664 1482683 1522699 1562714 1592727 1632739 1672748 1712756 1752761 1792765 1832768 1862768 1902767 1942765 1982760 2012754 2052747 209];p0=[1 1 1 1 1];warning off% 拟合系数,最小二乘方法p=nlinfit(x,zeros(size(x,1),1),F,p0);plot(x(:,1),x(:,2),'ro');hold on;xmin=min(x(:,1));xmax=max(x(:,1));ymin=min(x(:,2));ymax=max(x(:,2));% 作图ezplot(@(x,y)F(p,[x,y]),[-1+xmin,1+xmax,-1+ymin,1+ymax]); title('曲线拟合');legend('样本点','拟合曲线')首先用excel对下椭圆的纵坐标进行排序,找出最小值为81,再用matlab程序求出横坐标1497.5,最后把横坐标代入椭圆方程中求出B,C,D点的值,function f=fx(x);f=8.5236e-038*x*x-2.4333e-034*x-4.9894e-033*81+1.3252e-035*81*81+4.9044e-031;>> z=fzero(@fx,1450)z =1.4975e+003function f=fx(y);f=8.5236e-038*1497.5*1457.5-2.4333e-034*1457.5-4.9894e-033*y+1.3252e-035*y*y+4.9044e-031;B=fzero(@fx,300)B =293.8610>> function f=fx(y);f=5.7344e-032*1497.5*1457.5-1.6323e-028*1457.5-1.2744e-026*y+3.516e-030*y*y+1.1562e-0 23;C=fzero(@fx,1650)C=1.6448e+003D=fzero(@fx,1980)D=1.9798e+003function q=myfun2(p)x=p(1);y=p(2);q(1)=0.127*1351*(x+y)-97543.41;q(2)=1899*(x-y)*0.127-97543.41;>> options=optimset('Display','off'); >> x=fsolve(@myfun2,[487,84]',options)x =486.482582.0284。
拟合椭圆主直径
拟合椭圆主直径
拟合椭圆的主要直径通常指的是椭圆的长轴。
在椭圆拟合中,可以使用不同的数学方法和算法来确定椭圆的主要直径。
这通常是通过分析已知的数据点或图像来实现的。
一种常用的方法是最小二乘法(Least Squares Method),通过将椭圆方程与已知数据点进行拟合,找到最符合数据的椭圆参数,包括主要直径的长度。
最小二乘法的目标是最小化残差,即数据点到拟合椭圆的距离之和的平方。
另一种方法是椭圆的二次拟合(Ellipse Fitting),这种方法通常涉及到数学优化算法,如梯度下降法或最小二乘法,以找到最佳的椭圆参数,包括主要直径的长度。
拟合椭圆主要直径的具体方法可能取决于你所使用的编程语言和库,以及数据的形式。
你可以参考相关数学和图像处理库的文档,了解如何在特定环境中实现椭圆主要直径的拟合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
椭圆的目标函数:
F(A,B,C,D,E)=XiGeMa(xi^2+A*xiyi+B*yi^2+C*xi+D*yi+E)^2
分别对A,B,C,D,E求一阶偏导并令其等于0
得到线性方程组:
|A1B1C1D1E1||A|=|resul1|
|A2B2C2D2E2||B|=|resul2|
|A3B3C3D3E3||C|=|resul3|
|A4B4C4D4E4||D|=|resul4|
|A5B5C5D5E5||E|=|resul5|
求得A,B,C,D,E.
椭圆的五个参数:
center.x=(2*B*C-A*D)/(A*A-4*B);
center.y=(2*D-A*D)/(A*A-4*B);
fenzi=2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);
fenmu=(A*A-4*B)*(B-sqrt(A*A+(1-B)*(1-B))+1);
femmu2=(A*A-4*B)*(B+sqrt(A*A+(1-B)*(1-B))+1);
long=sqrt(fabs(fenzi/fenmu));
short=sqrt(fabs(fenzi/femmu2));
theta=atan(sqrt((center.x*center.x-center.y*center.y*B)/(center.x*center.x *B-center.y*center.y))+0.0001)*180/cv_pi;;
vector<double>getEllipsepar(vector<CvPoint>vec_point)
{
vector<double>vec_result;
double x3y1=0,x1y3=0,x2y2=0,yyy4=0,xxx3=0,xxx2=0,x2y1=0,yyy3=0,x1y2=0,yyy2= 0,x1y1=0,xxx1=0,yyy1=0;
int N=vec_point.size();
for(int m_i=0;m_i<N;++m_i)
{
double xi=vec_point[m_i].x;
double yi=vec_point[m_i].y;
x3y1+=xi*xi*xi*yi;
x1y3+=xi*yi*yi*yi;
x2y2+=xi*xi*yi*yi;;
yyy4+=yi*yi*yi*yi;
xxx3+=xi*xi*xi;
xxx2+=xi*xi;
x2y1+=xi*xi*yi;
x1y2+=xi*yi*yi;
yyy2+=yi*yi;
x1y1+=xi*yi;
xxx1+=xi;
yyy1+=yi;
yyy3+=yi*yi*yi;
}
long double resul1=-(x3y1);
long double resul2=-(x2y2);
long double resul3=-(xxx3);
long double resul4=-(x2y1);
long double resul5=-(xxx2);
long double B1=x1y3,C1=x2y1,D1=x1y2,E1=x1y1,A1=x2y2;
long double B2=yyy4,C2=x1y2,D2=yyy3,E2=yyy2,A2=x1y3;
long double B3=x1y2,C3=xxx2,D3=x1y1,E3=xxx1,A3=x2y1;
long double B4=yyy3,C4=x1y1,D4=yyy2,E4=yyy1,A4=x1y2;
long double B5=yyy2,C5=xxx1,D5=yyy1,E5=N,A5=x1y1; //
CvMat*Ma=cvCreateMat(5,5,CV_64FC1);
CvMat*Md=cvCreateMat(5,1,CV_64FC1);
CvMat*Mb=cvCreateMat(5,1,CV_64FC1);
//
cvmSet(Mb,0,0,resul1);
cvmSet(Mb,1,0,resul2);
cvmSet(Mb,2,0,resul3);
cvmSet(Mb,3,0,resul4);
cvmSet(Mb,4,0,resul5);
cvmSet(Ma,0,0,A1);
cvmSet(Ma,0,1,B1);
cvmSet(Ma,0,2,C1);
cvmSet(Ma,0,3,D1);
cvmSet(Ma,0,4,E1);
cvmSet(Ma,1,0,A2);
cvmSet(Ma,1,1,B2);
cvmSet(Ma,1,2,C2);
cvmSet(Ma,1,3,D2);
cvmSet(Ma,1,4,E2);
cvmSet(Ma,2,0,A3);
cvmSet(Ma,2,1,B3);
cvmSet(Ma,2,2,C3);
cvmSet(Ma,2,3,D3);
cvmSet(Ma,2,4,E3);
cvmSet(Ma,3,0,A4);
cvmSet(Ma,3,1,B4);
cvmSet(Ma,3,2,C4);
cvmSet(Ma,3,3,D4);
cvmSet(Ma,3,4,E4);
cvmSet(Ma,4,0,A5);
cvmSet(Ma,4,1,B5);
cvmSet(Ma,4,2,C5);
cvmSet(Ma,4,3,D5);
cvmSet(Ma,4,4,E5);
cvSolve(Ma,Mb,Md);
long double A=cvmGet(Md,0,0);
long double B=cvmGet(Md,1,0);
long double C=cvmGet(Md,2,0);
long double D=cvmGet(Md,3,0);
long double E=cvmGet(Md,4,0);
double XC=(2*B*C-A*D)/(A*A-4*B);
double YC=(2*D-A*D)/(A*A-4*B);
long double fenzi=2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);
long double fenmu=(A*A-4*B)*(B-sqrt(A*A+(1-B)*(1-B))+1);
long double femmu2=(A*A-4*B)*(B+sqrt(A*A+(1-B)*(1-B))+1);
double XA=sqrt(fabs(fenzi/fenmu));
double XB=sqrt(fabs(fenzi/femmu2));
double Xtheta=atan(sqrt((XA*XA-XB*XB*B)/(XA*XA*B-XB*XB))+0.0001)*180/3.1415926;
vec_result.push_back(XC);
vec_result.push_back(YC);
vec_result.push_back(XA);
vec_result.push_back(XB);
vec_result.push_back(Xtheta);
return vec_result;
}。