T-S模糊神经网络算法
动态T-S递归神经网络及其应用

2 S h o f n o a o c n e dE gn eig e t l o t U i es y h n s a 10 3 hn ) . c o l f r t nS i c n ier ,C nr uh nv ri ,C a g h 0 8 ,C ia oI m i e a n n aS t 4
( DTRF ) sp o o e Th IN i r p s d. eDTRFNN d p sBP l o ih o e eg t e r i g a d u e mp o e a o t ag rt m f rn t i h an n n s si r v d BP l o t m o w l ag rh i t
Dy a i S Re u r n t r sa d Th i p l ai n n m c T— c re tNe wo k n e rA p i to c
P n ab e gXio o ,Gu eh i W iua (1 S h o f lcr n no mainE gn eig, Hu a iest fT c n lg . c o l Ee ti a dIf r t n ie rn o c o n Unv ri o e h oo y, Z u h uHu a 1 0 7, Chn ; n y h z o n n4 2 0 ia
彭 晓 波 ,桂 卫 华
(. 1 湖南工业大学 电气 与信息工程学院 ,湖南 株洲 4 2 0 ; 10 7 2 中南大学 信息科学 与工 程学 院 ,湖南 长沙 4 0 8 ‘ . 10 3)
摘 要 :基 于递归神 经 网络和模糊 系统 ,给 出了一种动 态 T s递 归模 糊神 经 网络 ( T F N o该神 经网 — D RN 络 用 BP算 法进 行 网络权 值的 学 习,并在 权值 学 习的基础 上采 用改进 的 B P算法 克服局部 极 小。 以动 态 系统 的辨 识 为例 进行仿 真 实验研 究 ,并与一般 的模 糊神 经 网络进行 了比较 。结果表 明 ,DT NN 的辨 识误 差较 RF
基于T-S型模糊神经网络的软件过程可信评价模型研究

好, 但它 同时又存在人工 干预多 、推理速度慢等 缺点。如果
将 二者有机地结合起来 ,可以起到互补 的效果。
靠性不 断 的发 展 ,建 立 了各 种软件 可信 度评价模 型 。总体
看来 ,国 内外 对软件 可信度 的研究 主要分 为软件 的过程 可 信和软件 产 品的可信 ,其 中任 何一个 方 面出现 问题 都可 能 导致整个 软件 项 目的可信度不 足 问题的 出现 。本 文主要 对 第一方 面进行详 细 的分析 、研 究和设 计 。
侯雅明:基亏 T— S型模糊神经网络的软件过程可信评价模型研究
理 论研 讨
基 于 T—S型 模 糊 神 经 网络 的 软 件 过 程 可 信 评 价 模 型 研 究
侯雅 明
( 首都 经济 贸易大学 信息 学院 ,北京 10 7 ) 00 0
[ 摘 要 ]研 究软件 项 目的可信度 是 当今 信 息 技 术领 域 的 一 个热 点 问题 。本 文 首先 介 绍研 究软 件过 程 可信 度 的 背
件过程 划分为 主要 的三个研 究对象 ,即过程 行 为 、过程 产 22 T— . S模 糊神经 网络原 理 ( )前件 网络 1 第 一层 为输入 层 ;第 二层每个 节点代 表一个 语言变 量
值 ;第三用
216 0. 1
]
的连接权值 。
= ∑ /
J= I
3 基于 T—S模糊 神经 网络 建立评估 模型
31 建立评 价指标体 系 . 软件 过程可 信度评 估指标 体系 的建立是 可信度评 估 的 关 键 ,对 软件 过程可信 度 的分 析是基 于分解 的思想 ,将整
基于T—S模糊神经网络的ATM网络拥塞控制

网络 进行 拥 塞控 制 的方 案 。仿 真 结果 表 明 ,该 方法 改 善 了 网络对 拥 塞 的实 时处 理 能力 ,又增 加 了
网络 资源 的利用 率 。
关键 词 :A M 网络 ;模 糊神 经 网络 ;拥 塞控 制 ;信 元丢 失率 T
中图 分 类号 :T P1 l 文 献 标 识 码 : A 文 章 编 号 : 10 —3 X ( 0 2 0 -0 90 0 04 6 2 0 ) 80 3 -6
维普资讯
20 0 2年 8月 第 2 3卷 第 8期
通
信
学
报
V0 . 3 N O 8 1 . 2 Au u t 0 2 g s 0 2
Байду номын сангаас
J U RN A L F C HⅡ I STI TE O O A N TU OF M M UN I CO CATI N S O
Co g s i n c n r li n e to o t o n ATM e wo ksu i g T・ n t r sn - S
f z ur t uz y ne alne wor k
CH EN ng- a Ze qi ng, ZHENG o, YUAN Ta Zhu— hi z
收 稿 日期 : 2 010 —4 修 订 日期 :2 0 —22 0 —9 1 ; 0 20 —5 基 金项 目: 国家 自然 科 学基 金 资助 项 目(0 7 0 1 ;天 津 市 自然 科 学重 点 基金 资助 项 目( 1 8 0 1 ) 6 14 2) 0 3 07 1
作 者 简介 : 陈增 强 ( 9 4 ) 16 一 ,男 ,天 津 人 ,南 开大 学教 授 ,博士 生 导师 ,主 要研 究 方 向 为智 能通 信 与控 制 、 计 算 机 网络 ;郑 涛 ( 9 5 ) 1 7 一 ,男 ,安徽 蚌埠 人 ,南 开 大学 博 士研 究 生 ,主要 研 究方 向为计 算机 通 信 ;袁著 祉 ( 9 7 ) 男,山 东青 岛人 ,南 开 大学 教授 ,博 士 生 导师 ,曾获教 育 部科 技进 步 一 等奖 及 国防科 工 委光 华 一 13 . , 等 奖 ,主要 研 究方 向为智 能控 制 ,计算 机通 信 。
扩展T-S模糊模型的PSO神经网络优化算法

t e ewo k h n t r mo e i a p id o p i z t e d 1 S p l t o t e mie h wh e . h t s e u t s o e 1 te e t s l r s h w t a t e h t h m eh d o n u e h p ro a c o t o t e s r t e e f r n e f m
优 化 , 一 种 可行 的 结 构优 化 方 法 。 是
关键 词 : 糊 模 型 ; 模 离子 群优 化算 法 ; P 经 网络 ; 化 B 神 优 DO :0 7 8 .s.028 3 . 1 . . 9 文 章 编 号 :0 283 (0 0 3—2 80 文献 标 识 码 : 中图 分 类 号 : P 8 I1 . 7  ̄i n10 .3 1 0 0 50 3 s 2 3 6 10 .3 12 1 )50 3 .4 A T 1
28 3
2 1 ,63 ) 0 0 4 (5
C m ue E gnei d p lai s o p t n i r ga A pi t n 计算机工程与应用 r e n n c o
扩展 T S 糊模 型 的 P O神 经 网络优 化 算 法 -模 S
吴 科, 李伟华
W U e. e. u K LI W ih a
b y e e e T- f z xt nd d S uz y m o e . d 1The BPN N wih t hi e l y r e r s u be of d s g v ra e a e e r c i n f t m e n dd n a e n u on n m r e i n a i bl s, f r xta to o he t a
基于T-S模糊PID控制的气动系统研究
e ()决定 。
收 稿 日期 :0 1 71 2 1 —1
由 T kg 和 S gn a ai u eo提 出 的一 种 用 于 多 维模 糊 推 理方 法 , 质非 线性 ,易 于表 达 复 杂 系统 的动 态特 性 本 的模 型 , 之为 TS模 型 J 称 . 。基 于 T k g S gn a ai u eo模 型 .
( ) / p表示 压力 差 , a =P 2 。 △ 由 p 一P 决定 。
本 文提 出一 个 TS模 糊神 经 网络应 用 于气 动 伺 服 . 系 统 的控制 , 中模 糊逻 辑 系统完 成气 动 系统 的控制 , 其 同时利 用基 于神 经 网络 的学 习算 法调节 隶 属度 函数 的 参数 和神 经 网 络 的权 值 , 而 优 化 整 个 系 统 的性 能 。 从 应用 所 提 出的控 制方 法 , 动 执行 器 通 过 多 传 感 器 信 气
图 1 基 于 T- 型 待 模 糊 神 经 网 络 结 构 S模
模糊 神 经 网络具 有 模 糊 化 层 , 理 层 和 去 模 糊 化 推
中模 糊逻 辑 系统 完成 气动 系统 的伺服 控 制 , 同时利 用基 于神 经 网络 的 学 习算 法调 节 隶属 度 函数 的参 数 和神
经 网络 的权 值 , 可在 一定 程度 上适 应参数 的 变化从 而优 化 整 个 系统 的性 能 。应 用所提 出的控 制 方 法 , 气动执 行 器通过 多传感 器信 息 融合获 取运 动状 态和 气体 压 力 , 自动 的根 据 获取 的信 息调 节 比例 压 力 阀的输 出, 在各
息融 合 获取 运动 状 态 和气 体 压 力 , 自动 的根 据 获 取 的
( ) / 表示 气 动执行 器设 定位 移 与实 际位 移 的 3 e
DE优化T—S模糊神经网络的交通流量预测

p r e d i c t i o n o f t r a f f i c f l o w.
H OU Yu e ( S c h o o l o f E l e c t r o n i c a n d I n f o r ma t i o n E n g i n e e r i n g ,L a n z h o u J i a o t o n g U n i v e r s i t y ,L a n z h o u 7 3 0 0 7 0 , C h i n a )
关 键 词 :差 分进 化 ;T - S模 型 ;模 糊神 经 网 络 ;交 通 流 量 ;预 测
中图法分类号 : T P 3 0 1 . 6 文献标识号 : A 文章编号 :1 0 0 0 — 7 0 2 4( 2 0 1 3 )0 9 — 3 2 8 4 — 0 4
基于T-S模糊神经网络的柔性评价专家系统
收 稿 日期 :0 7 1 20 4—8
维普资讯
第 1 期
马强 , : 等 基于 卜 S模 糊神 经 网络 的柔性 评价 专 家系统
V 13 N . o.0 01
F b 2 0 e .0 8
20 0 8年 2月
文 章 编 号 :6 40 6 (0 8 0 — 5 -6 17 - 2 20 ) 15 40 2 0
基 于
S模 糊 神 经 网 络 的 柔 性 评 价 专 家 系 统
马 强 付 艳 茹 ,
( .浙江警官职业学院 安 防系, 1 浙江 杭 州 3 0 1 ;.浙江警 官职业学 院 基础部 , 10 8 2 浙江 杭州 30 1 ) 10 8
5 5
1 卜 S模 糊 模 型 及 可 辨 识性
典 型 的 一 s模 糊模 型 及其 可辨 识性是 基 于柯西 线性 模 糊模 型建 立起 来 并 予以简化 的。柯 西 线 性模 糊
模 . 型 的后件 一般 形 为 Y=b或 Y= +b 在 输 入 状态 下 , . , 可对 语 言 变量 的所在 论 域 进 行 分类 划 分 。 因 I0 /
的 。卜 S模糊 模型 是在柯 西 线性模 糊模 型 的基 础上 , 区别地 处 理 结 构辨 识 和 参数 辨 识 , 将结 构 的辨 有 即 识与参数的辨识分开来进行 , 使模型选优的问题得 以简化 , 有利于算法 的有效实现。但这种单纯地简化难 以 保证 系统模 型是 最优 的 , 得在解 决 复杂模 糊 系统的有 效辨 识 问题 时仍会 产生许 多 困难 。例如 , 使 传统 的教 学 评价 系统虽 直观 易操作 , 它是 隶属 于行 为科学 范畴 的一种 刚性 系统 , 以教师 为对象 的不 精确 推理 的模 糊 但 在 系统 中 , 以有效 辨识 教学 质量 与评 价 指标 的 内在关 系 。虽 然有 关 ?一s模 糊模 型 的有 效 辨识 性 问题 也 取 难 得 了相应 的研究 成果 。, 由 于 卜 s模糊 模 型 的 辨识 过 程 相 对 复 杂 。一 定 程 度 上 限 制 了 自身 应 用 , 。但 对
Levenberg—Marquardt算法在T—S型模糊RBF神经网络训练中的应用

XU F n - o , H e gY u Z ANG XioGa g( p r n f lc ia a dIfr t nE gn eig H n n a - n De at t et c l n omai n ier , u a me o E r n o n
Unv ri , h n sa4 8 , hn) iesy C a gh 0 2 C ia t 1 0
t se h o g n e p rm e t e t dtr u h a x e i n. ; e e b r — r u r tag rt m h b i e r i gag rt h K e w o ds T S fz ym o e ; y r : - u z d lRBF lv n e g ma q a d l o ih ; y rdla n n lo i m
的前提下 ,可以使 用神经 网络 的 自学习能 力优化 T S — 模糊模型的参 数。T S型模糊 R F — B 神经 网络 即是 T S — 型模 糊神经网络 中的一种 ,因其训练 便捷 易行、收敛 速 度快 ,而且容易避免局部极小点 ,所 以表现 出极 大 的魅力。虽然如此 ,找 到一种 简单且实用的 T S型模 — 糊 R F神经网络的训练算 法并不容 易 ,文献【 6 B I 3】 — 在这
Ab t a t sr c :
To mp o t e f ce  ̄ i r ve h e in i
o tanig h T S fz y f r i n t e - u z mo e b s d d l a e RBF e r l ewo k t e n u a n t r , h
1 引言
1 8 年 T k g和 S g n 5 9 a a i u e o提出 了一种分段 线性 模糊模型, T k g- u e oT S模型【 I因为 它能 即 a a iS g n ( — ) 1 】 够使 用较少 的模 糊规 则 为一 个复 杂的 非线性 对 象建 模 ,所 以得到 的数学模 型比一般模糊模型更为简洁 , 因而更加有利于数学分析 ,所 q adtag rt m o h ri i g o e T- u z d lb s d RBF ne r ln t r r v n e g M r u r lo i h f rt e tan n ft S f z y mo e a e h u a e wo k a e
基于T-S模型的模糊辨识方法及其应用研究

基于T-S模型的模糊辨识方法及其应用研究随着工业自动化技术的快速发展,越来越多的复杂系统被应用于现实生活中。
这些系统的复杂性使得传统的模型预测和控制方法难以胜任。
模糊辨识方法作为一种新兴的非线性系统建模和控制技术近年来得到了广泛应用。
其中,基于 T-S 模型的模糊辨识方法是一种常用的方法,它将系统的状态空间划分为一系列的子空间,并通过构建模糊规则来实现系统的建模。
一、T-S 模型简介T-S 模型是由 Takagi 和 Sugeno 在 1985 年提出的,它是一种特殊的前向神经网络。
T-S 模型是基于线性子模型的一种混合系统建模方法,它将非线性系统划分为一系列的线性子模型,并在每个子模型上进行线性建模,然后将所有的线性子模型通过模糊规则进行组合,从而得到一个全局的非线性模型。
在T-S 模型中,每个子模型包含了一个线性输出和一组参数,这些参数通过模糊规则进行调节。
T-S 模型的主要优点是可以有效地处理非线性系统,并且可以对系统中的不确定性进行建模和控制。
二、T-S 模型的模糊辨识T-S 模型的模糊辨识通常包括以下五个步骤:1. 确定 T-S 模型的结构:包括模糊集的选择、模糊规则的生成、模糊子系统的数量等。
2. 确定模糊子系统的参数:包括模糊规则的隶属度函数、模糊子系统的输入变量和输出变量、模糊子系统的权重系数等。
3. 构建初始模型:通过 T-S 模型的线性化方法得到初始模型。
4. 模型训练和优化:通过仿真和实验数据的反馈,利用最小二乘法、遗传算法等方法对模型进行优化。
5. 模型验证和应用:对模型进行验证并应用于实际工程问题。
如控制、诊断等领域。
三、应用案例基于 T-S 模型的模糊辨识方法已经应用于许多领域,如控制、诊断、故障检测等。
下面以控制领域中的应用为例。
某工厂生产过程中需要对裁切机进行控制,以确保产品的质量和生产效率。
但是由于生产过程中存在各种不确定性,传统的PID 控制方法不够精确。
因此,研究人员采用了基于 T-S 模型的模糊辨识方法来建立控制模型。
利用改进T-S模糊神经网络恢复MMW图像

利用改进T-S模糊神经网络恢复MMW图像尚丽;周燕【摘要】为有效消除毫米波(MMW)图像中的非线性噪声,利用T-S模糊神经网络(T-S-FNN)对不确定信息进行有效区分的特性,实现MMW图像中非线性信息噪声的逼近,达到消噪的目的.为克服T-S-FNN规则冗余的缺点,考虑前件网络基于自适应模糊聚类的隶属度函数约束及后件网络的权值优化学习,对其前件及后件的结构和学习算法进行改进,使T-S-FNN的计算简化、鲁棒性更强.利用改进的T-S-FNN 对MMW图像进行处理,实验结果表明,该模型具有较好的非线性噪声抑制能力.【期刊名称】《计算机工程与设计》【年(卷),期】2018(039)005【总页数】5页(P1463-1466,1489)【关键词】非线性信息;模糊神经网络;TS模糊模型;毫米波图像;图像消噪【作者】尚丽;周燕【作者单位】苏州市职业大学电子信息工程学院,江苏苏州215104;苏州市职业大学电子信息工程学院,江苏苏州215104【正文语种】中文【中图分类】TN911.730 引言毫米波(milli-meter wave,MMW)图像在系统成像过程中会渗入很多未知的噪声[1,2],且图像的非线性信息缺失非常严重,图像视觉效果较差,研究有效的MMW图像恢复方法一直是备受关注的课题[2]。
而模糊神经网络(fuzzy neural network,FNN)模型兼有模糊系统和神经网络模型的优点[3-5],能够解决很多传统技术无能为力的、不确定的、且非常复杂的非线性问题[6-8]。
因此,本文引入FNN技术来实现MMW图像的非线性滤波,从而获得图像细节和轮廓边缘较清晰的MMW图像。
目前,T-S模糊系统已被实践证实是一种典型的、有效的非线性处理手段[2,8,9]。
然而,常用的T-S模糊系统中的规则数目和规则层的神经元数目都没有合理的确定方法,常常出现规则冗余的情况;另外,T-S模糊模型中的结构和优化算法也比较复杂,计算速度较慢。
模糊神经网络简介
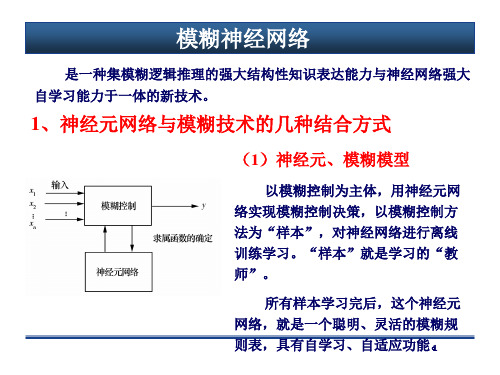
以神经网络为主体,将输入空间分割成若干不同型式的模糊推论 组合,对系统先进行模糊逻辑判断,以模糊控制器输出作为神经元网 络的输入(串)。
后者具有自学习的智能控制特性。
2
模糊神经网络
(3)神经与模糊模型
根据输入量的不同性质分别由神经网络与模糊控制直接处理输入 信息,并作用于控制对象(并),更能发挥各自的控制特点。来自y 取小运算。∑
ec
……
∏
wnn
outi(j3) ini(j3) out1(i2) out2(2j)
i 1,2,3; j 1,2,3
∏
输入层 模糊化 模糊推理 去模糊化
10
基于标准模型的模糊神经网络
…… …… ……
∏ w11
∏
e
……
∏ wij
y
∑
ec
……
∏
wnn
∏
输入层 模糊化 模糊推理 去模糊化
(4)在结构上将二者融为一体
构成模糊神经网络,利用神经网络来实现模糊推理,在本质上是 模糊系统的实现。
3
模糊神经网络 优点:
1)模糊神经网络虽然也是局部逼近网络,但是它是按照 模糊系统模型建立的,网络中的各个结点及所有参数均有 明显的物理意义,因此这些参数的初值可根据模糊系统的 定性知识加以确定,经过上述学习算法的训练,收敛后的 网络能够满足系统所要求的输入输出关系,这是模糊神经 网络同单纯神经网络相比其优点所在。
1
N
Z
0.5
P
outi(j2) ini(j2)
(out ) e (1)
outi(1) aij bij 2
2
Aij
i
隶属度 μ
0
递归T-S模糊模型的神经网络
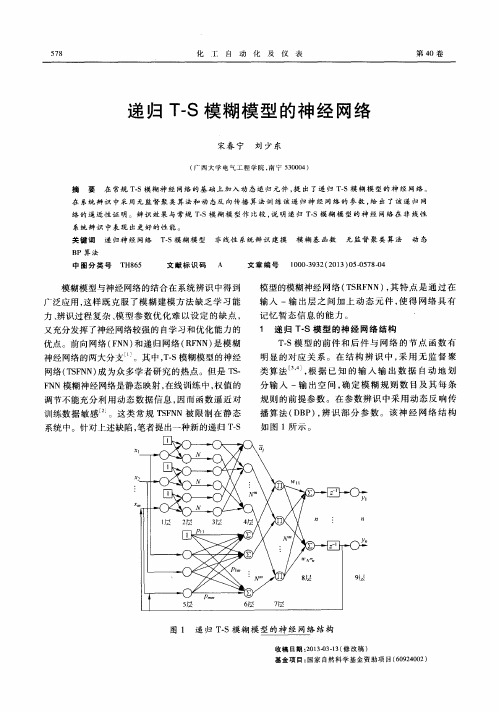
模糊模型与神经 网络的结合在系统辨识 中得 到 广泛应用 , 这样既 克服 了模糊 建模方 法缺乏 学习 能 力、 辨识过程复杂 、 模 型参数 优化难 以设 定 的缺 点 , 又充分发挥 了神经网络较强 的 自学 习和优化能力 的 优点。前 向网络 ( F N N) 和递归 网络 ( R F N N) 是模糊 神经网络 的两大分支 。其 中, T — s 模糊模型的神经
5 7 8
化
£ 自 动
化 及
仪 表
第 4 0卷
递归 - I " 一 S模 糊 模 型 的神 经 网络
宋 春 宁 刘 少 东
( 广 西 大 学 电气 工 程 学 院 , 南宁 5 3 0 0 0 4 )
摘 要 在 常规 T - s 模 糊 神 经 网络 的基 础 上 加 入 动 态 递 归 元 件 , 提 出 了递 归 T — s模 糊 模 型 的 神 经 网络 。
Y =
,
∑( p 柚+P l l+‘ ・ ’+ P k z ) a /∑
.
.
.
i
i
一
过该 节 点 , 把 输入 向量 的值 传到 下一 层 。 b .第 二层 作 用 是计 算 上 层 节 点传 递 值 的隶
属 度 函数 。
=
∑( p 舯+P l+… + l P k m ) / a
于集 合 y中 , 在集 合 cR 上 的所 有 的连 续 实 函
式 中
—— 模糊 子集 ; m — — 规则 的数 目 ; R —— 第 条 模糊 规则 ; y , —— 第 条 输 出规则 。
数s 和 任 何 >0 , 都 可 以找 到 f<Y , 并且 下式 成
规 则 的前 提参 数 。在参数辨 识 中采用 动态反 响传
基于T-S模糊神经网络网上智能咨询系统理论应用研究

络 的节 点 数 和初 始参 数 。 先对 各 输 入 变量 作 聚 类 分析 . 首 确定 各 个输 入 变 量 的语 言 值数 目和 隶 属 函数 的参 数 的初 始 值 :再 对 整 体 的输 入 和输 出聚类 以确 定 系统 规 则 数 目 。这 在 理 论 上是 行 得 通的, 但是 要 经 过 两次 聚类 分 析 才 能 确 定 初始 值 和 参 数 数 目 , 这 样 计 算 量 加 大 : 且 参 数 数 目繁多 , 习速 度 也 慢 , 以有 了一 并 学 所 种 改 进 的 T S模糊 神 经 网络 模 型 . 结 构 如 图所 示 。 _ 其
图 1 - 模糊神经 网络结构模型 s T
启 发 :而 神 经 网 络则 着 眼 于
人 脑 的微 观 结 构 .侧 重 于对 人 类 智 能 的 神 经 系 统结 构 的
模 仿 。图 1就 是 T S模 糊 神 — 经 P 络 的结 构 图 - 1 网
该 网 络 是 由前 件 网络 和
。
好 的 It nt 络应 用 系 统 , 信 息 具 有 更 强 的 生命 力 和 活 力 , 般 推 理 过程 中的参 数 . 于 每一 个 模 糊 子 空 间 . ne e 网 r 使 对 系统 的局 部 模 型 已成 为一 种迫 切 的要 求 。 将模 糊逻 辑 和 神 经 网络 技 术 相结 合 , 应 可用 一 个 线性 模 型来 描 述 .而 系统 的总 的输 出则 为 各 局部 线 性 用 聚 类 和 神经 网络 的方 法 自动 生 成 模 糊 规 则 .采 用 分 布 式 组 件 模 型输 出 的加 权和 。利 用 T S模 型 , 个 非 线 性 模 型可 以看 成 — 一 结 构 模 型 开发 一套 网上 智 能 咨询 系统 具 有 重 要 意 义 1 T S模 糊神 经 网络 ,- 将 模 糊 逻 辑 与 神经 网络 相 结 合 就 构 成 了模 糊 神 经 网 络 。模 糊 逻 辑 的优 势在 于可
T-S模糊模型在锅炉汽包水位建模中的应用

为3 3 0 MW 工 况下 , 每隔 5 s测取输入 、输 出数据 , 汽包
数位变 化范 围在 一3 0 mm 3 0 mm。根据测取 的数据 , 对 T—S模 糊神 经网络模型进 行参数学 习 , 构造 出系统的模
型 。系统 的算法 流程如 图 l 所示 、测试集样本 的拟合情 况如 图 2所 示 、测 试集输 出误差 曲线如 图 3所示 引。
组成 了锅 炉 汽包 内部 的容 积 。 由于 燃 料量 对 汽包 水 位 的影响 有较 大 的传 输滞 后和 容量 滞 后 , 变化 十分 缓慢 ,
可 以忽 略不计 ; 而 蒸汽负荷 的变化 往往 影响 引起 蒸汽压 力 的变化 。因此 , 蒸汽负荷 可 以看 成是包 括蒸 汽压 力变 化 。这样 , 蒸 汽压力 的变化 可 以和 蒸汽负荷 变化对 汽包 水 位 的影响可 以看 成是一 项I 4 J 。
行 业 应 用 与 交 流
nd u s t r i al Ap pl i c at i on s an d Co m mun i c a t i o2 0l 3年 第 3 2卷 第 1期
积 、蒸 发 面下 方 的汽 包体 积 和 汽包 内水 的体积 三 部分
图2 测试 数据 样本 拟合 曲线 图
以简化 成 是 给水 量 和蒸 汽量 的阶跃 变 化 。将 锅 炉汽 包 水位看 成是双输入 ( 给水 流量 、蒸汽 流量 ) 单输出( 汽包水 位) 的系统 。 对 系统建立 的 T— s模糊神 经网络系统 , 在锅 炉负荷
测试数据样本拟 合谩 差
的设计[ J ] . 热能动力工程 , 2 0 0 3 ( 3 ) : 1 8 0 -1 8 3 . [ 9 】W ANG L X. Un i v e r s a l a p p r o x i ma t i o n b y h i e r a r —
基于T—S模糊神经网络的边坡稳定性分析
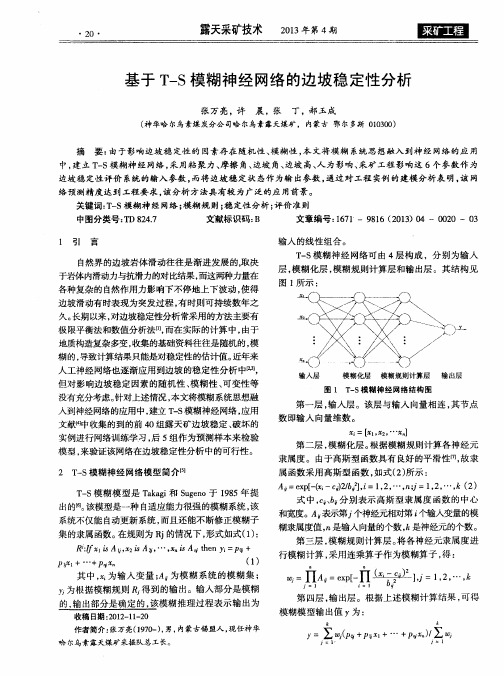
图1 T — S 模 糊 神 经 网络 结 构 图
人到神经 网络的应用中 , 建立 T - s 模 糊神经 网络 , 应用
文献【 4 】 中收集 的到 的前 4 0 组露 天矿边坡 稳定 、 破 坏 的 实例进行 网络训 练学习 , 后5 组 作为预测 样本来 检验 模型 , 来验证该 网络在边 坡稳定性分析 中 的可行性 。 2 T — S模糊 神经 网络模 型简 介阎 T — S模 糊模 型 是 T a k a g i 和 S u g e n o于 1 9 8 5年 提
第 一层 , 输入 层 。该 层与 输入 向量相 连 , 其节 点
数 即输入 向量维 数 。
j =【 l , X 2 , … ]
第 二层 , 模糊 化层 。 根据模 糊规则 计算各 神经 元
隶 属度 。 由于 高斯 型 函数具 有 良好 的平滑 性『 7 】 , 故 隶
属 函数采 用高 斯型 函数 , 如式 ( 2 ) 所示 :
n n
, 、 .
其中 , 溉为输 入 变量 ; A 为模 糊 系 统 的模 糊 集 ; y 为根 据模糊 规则 R , 得 到的输 出 。输入 部分 是模 糊 的, 输 出部分 是确定 的 , 该 模糊 推理 过程 表示 输 出为
收 稿 日期 : 2 0 1 2 — 1 1 - 2 0
边坡稳定性评价 系统的输入参数 , 而将边坡稳定状态作为输 出参数 , 通过对工程 实例的建模分析表明 , 该网 络预 测精度 达到 工程要 求 , 该 分析 方 法具有较 为 广泛的应 用前景 。 关键词 : T — S模 糊神 经 网络 ; 模 糊规 则 ; 稳 定性 分析 ; 评 价 准则
T — S模糊 神 经 网络可 由 4层 构 成 ,分 别 为输入 层, 模 糊化 层 , 模 糊 规则计算 层和 输出层 。其 结构 见
基于动态T-S递归模糊神经网络的闪速熔炼过程参数软测量
第 1 0期
仪 器 仪 表 学 报
Chn s o r a o c e / i n t t f i e e J u n 】 fS i ni c l sr me t / t l
V(. 9 ) 2 NO 0 1 .1 Oe. 2 8 | oo
20 0 8年 1 0
Pe a b ng Xio o,Gu eh a, L n g n iW iu iYo g a g,W a g Li g u n n y n,Che ng n Yo
( colfl om t nSi c adE gnei Cnrl o t U i rt,C ag t 4 0 8 ,C ia Sho o Jr ai c ne n nier g, et uh n es) h nda 1 03 hn ) n o e n aS v i
we g t d l a n n lo i ih e e r i g ag rt hm fDTRFNN a e n d d c d. Th s mo e s a p id i t a a ee o e o f o h s b e e u e i d li p le n he p r m t rs f s ns r o t c p e a h s hi g pr c s n a f co . Ap lc to e u ts o h tt e a e a e p e iin r a h s t 7% . Th o p rf s me n o e s i a tD ̄ l p ia in r s l h wst a h v r g r cso e c e o9 e p o o e d l g c n p o i e us f li sr c in fr p o u to pe ain. r p s d mo ei a r vd e u n tu to o r d c in o r to n
用T—S模型模糊神经网络进行压裂效果预测

A ,
收 稿 日期
2 o —0 —l o2 l 6
第 一 作 者 简 介 刘洪 , 9 2 1 7 年生 , 在读 博士 生 , 从事 油 现
气 田增 产 技 术 研 究 工 作 , 址 ( 3 0 1 : 川 省 南 充 市 西 地 67 0 ) 四 南 石 油 学 院 研 究 生 院 , 话 :0 1 ) 6 2 0 电 ( 8 7 2 4 8 8。
其 中 A 是 模 糊 语 言 变 量 , 是 线 性 系 数 。 P 在 网络 结 构 图 中 , 件 网 络 用 来 匹 配 规 则 的 前 件 前
(f , 件 网 络 匹 配 规 则 后 件 ( e ) 以 下 讨 论 多 I) 后 Th n ,
输 入 单 输 出模 型 , 网 络 结 构 如 图 1所 示 。 其
The — PJ + PJ .l+ A + P"z n YJ 0 2 17
引 言
模 糊 神 经 网 络 _ , 其 是 T— S( k g — 1 尤 ] Ta a i
S g n ) 型 模 糊 神 经 网 络 , 年 来 得 到 了 广 ueo模 近 泛 的 研 究 和 应 用 。在 实 际 运 用 中 , 模 糊 神 经 网 用
法精 度高 , 化 能力强 。 泛
油 井 压 裂 效 果 预 测 , 实 施 增 产 措 施 决 策 的 是
一
项 十 分 重 要 的工 作 。 压 裂 效 果 一 般 采 用 设 计 一
维 、 维 、 三 维 、 维 模 型 以 及 油 藏 数 值 模 拟 方 二 拟 三 法 预测 , 些 方 法 要 求 具 备 准 确 的 油 藏 及 压 裂 施 这
系统辨识的新方法_OK
2
模型辨识问题:在给定性能指标下,根据系统 的输入输出数据确定(1)所有的参考模型集合;(2) 结构参数;(3)模型解关系阵R。以使性能指标J 极小。
N
R Rk
k 1
Rk px1 (k) • px2 (k) •• pxn (k) • py (k)
逼近 • 较大可能达到全局最优
(本质上存在局部极值问题)
18
15
三、模糊神经网络模型
• 神经网络 • 模糊系统 • 模糊系统与神经网络的结合----
模糊神经网络
16
基于T-S模型的模糊神经网络
1.模糊模型 T-S规则模型
2. 网络 由辨识算法和计算算法得到
3. 学习算法 连接权 前件网络底二层各结点隶属函数的中心值及宽度
17
模糊神经网络的特点
• 模糊神经网络是局部逼近网络 • 网络结点及参数具有明显的物理意义 • 参数学习和调整快 • 非线性函数可表示为多个线性函数的模糊
(2) 具有较好的泛化能力
12
缺点: 收敛慢 局部极值问题 网络结构难以确定 (经验、遗传算法)
改进: (1) 变尺度法 (2) 变步长法 (3) 引入动量项
13
4. 基于神经网络的系统建模和辨识
u(t)
y(t)
对象
y(t)
e(t)
NN
正模型、逆模型问题
14
• 可辨识性问题 • 对于拟辨识的动力学系统,必须预先给出定阶的差分方程 • 无法表达对象的干扰部分
3
2. T-S模型
Ri : if x1 is A1i andand xn is Ain
then y pi0 p1i x1 pinxn
基于T—S模糊模型的Kawakami混沌系统的控制
的鲁 棒模 糊 滑模 观测器 设 计 方法 . 张莉 等 采 用 非 线性 反馈 控 制方 法 , 出 系统 在 不 同 初值 下 实 给 现 同步 的充 分 必要条 件.
本 文 针 对 Ka k mi 沌 系 统 , 于 T S模 wa a 混 基 —
糊模 型 , 计 出一种 新 型模糊 控制 器 , 设 通过 构造 离 散 型模糊 I a u o p n v函 数 和 相 应 的控 制 律 , 方 y 既 便又 快捷 , 控制 器结 构简 单. 真 结果验 证 了所 提 仿
方法 的有 效性 .
系统 , 提 出 了最 小 能 量 引导 控 制 方 法. 景 超 并 付 等u 采 用混 沌 跟 踪 控 制 原 理 设 计 控 制 器 ,消 除
系统 中存 在 的混 沌 现 象.王 永 生 等口 提 出一 种
收稿 日期 : O 2 0 0 2 1 — 13
V o1 6 No. .3 3
J n O u e2 l 2
基 于 T— 糊 模 型 的 wa a 混 沌 系统 的控 制 * S模 Ka k mi
严 路 何 汉林 涂 建 军
( 军工 程 大 学理 学 院 海 武汉 40 3 ) 3 0 3
摘 要 : 究 了 离 散 Ka a a 研 w k mi昆沌 系 统 的 模糊 控 制 问 题 , 用 单 点 模 糊 化 、 积 推 理 和 中 心 平 均 去 利 乘 模 糊 化 模 糊 推 理方 法将 K wa a 系统 化 为 r s模 糊 模 型 . 用 T s模 糊 模 型 重 构 了 系 统 结 构 的 a k mi r _ 在 —
应用 于 He o n n混 沌 系 统 的 镇 定. 扬 正 等 提 刘
出一 种利 用非 线性 反馈 控制 离散 系统混 沌 运动 的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[x,mf]=plotmf(fismat1,'input',1);
figure
plot(x,mf)
title('fiual membership function');
%绘制神经模糊推理系统的输出曲线
anfis_y=evalfis(x1,fismat1);
figure
plot(epoch,truerr,'o',epoch,chkerr,'x')
hold on
plot(epoch,[truerr,chkerr]);
hold off
%绘制训练过程中的步长的变化的情况
figure
plot(epoch,ss,'-',epoch,ss,'x');
nummfs=5; %隶属度函数个数
mftype='gbellmf'; %隶属度函数类型
fismat=genfis1(trndata,nummfs,mftype);
%绘制模糊推理系统的初始隶属度函数
[x,mf]=plotmf(fismat,'input',1);
figure
plot(x1,y,'-',x1,anfis_y,'x')x,mf);
title('initial menbership functions')
%使用函数anfis()进行神经模糊建摸
numepochs=40; %训练次数40
[fismat1,truerr,ss,fismat2,chkerr]=anfis(trndata,fismat,numepochs,nan,chkdata);
chkdata=data(2:2:numpts,:); %测试数据集
%训练数据和检验数据的分布曲线
plot(trndata(:,1),trndata(:,2),'o',chkdata(:,1),chkdata(:,2),'x')
%建立T_S模糊模型
%采用genfis1()函数直接由训练数据生成模糊推理系统
%数据点个数51
numpts=51;
x1=linspace(0,1,numpts);
y=.6*sin(pi*x1)+.3*sin(3*pi*x1)+.1*sin(5*pi*x1);
data=[x1' y']; %整个数据集
trndata=data(1:2:numpts,:); %训练数据集
%计算训练后神经模糊系统的输出与训练数据的均方根误差
trnout=evalfis(trndata(:,1),fismat1);
trnrmse=norm(trnout-trndata(:,2))/sqrt(length(trnout));
%绘制训练过程中均方根误差的变化情况
epoch=1:numepochs;