哈工大机械原理大作业一连杆
哈尔滨工业大学机械原理大作业_连杆26题
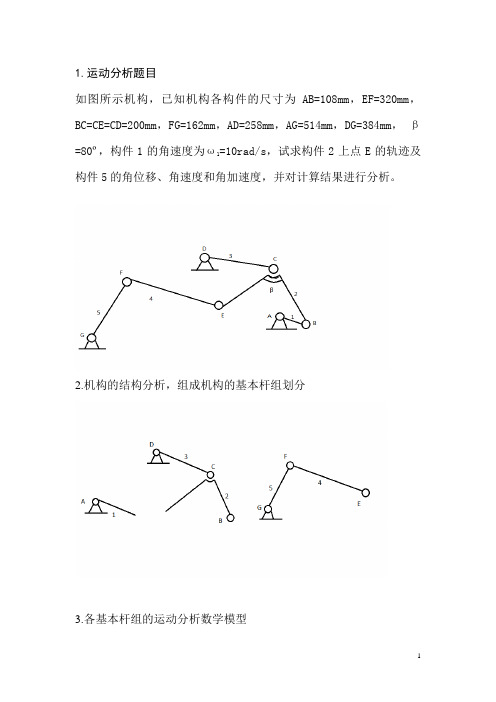
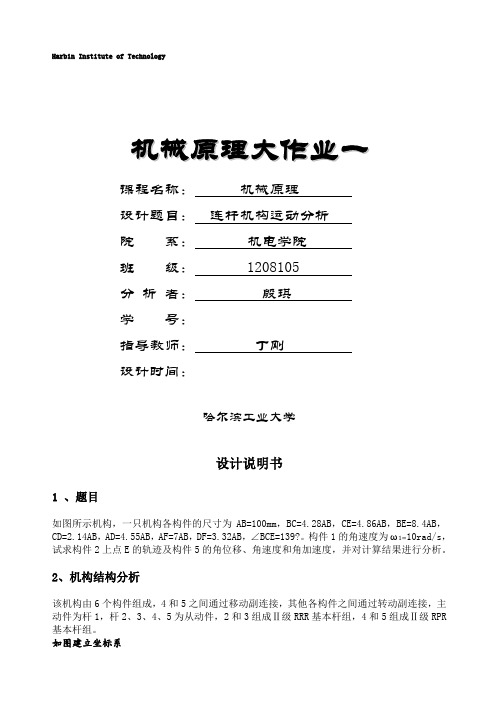
1.运动分析题目如图所示机构,已知机构各构件的尺寸为AB=108mm,EF=320mm,BC=CE=CD=200mm,FG=162mm,AD=258mm,AG=514mm,DG=384mm,β=80º,构件1的角速度为ω1=10rad/s,试求构件2上点E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
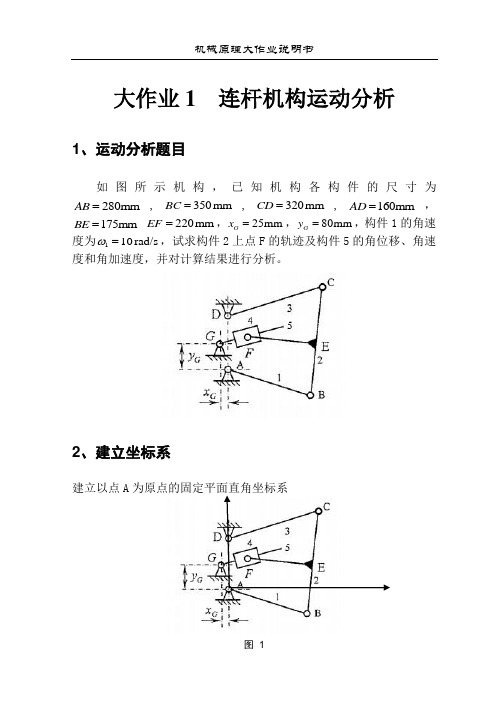
2.机构的结构分析,组成机构的基本杆组划分3.各基本杆组的运动分析数学模型(1)RR基本杆组:delt=0xB = xA + AB * Cos(f + delt)yB = yA + AB* Sin(f + delt)vxB = vxA - w * AB * Sin(f + delt)vyB = vyA + w * AB* Cos(f + delt)axB = axA - w ^ 2 * AB * Cos(f + delt):ayB = ayA - w ^ 2 * AB* Sin(f + delt)(2)RRR基本杆组Ci = lbc * Cos(fbc)Si = lbc * Sin(fbc)Cj = lcd * Cos(fcd)Sj = lcd * Sin(fcd)G1 = Ci * Sj - Cj * Siwbc = (Cj * (vxD - vxB) + Sj * (vyD - vyB)) / G1wcd = (Ci * (vxD - vxB) + Si * (vyD - vyB)) / G1vxC = vxB - wbc * lbc * Sin(fbc)vyC = vyB + wbc * lbc * Cos(fbc)G2 = axD - axB + wbc ^ 2 * Ci - wcd ^ 2 * CjG3 = ayD - ayB + wbc ^ 2 * Si - wcd ^ 2 * Sjebc = (G2 * Cj + G3 * Sj) / G1ecd = (G2 * Ci + G3 * Si) / G1axC = axB - ebc * lbc * Sin(fbc) - wbc ^ 2 * lbc * Cos(fbc)ayC = ayB + ebc * lbc * Cos(fbc) - wbc ^ 2 * lbc * Sin(fbc)EB = 2 * BC * Cos(febc)xE = xB + EB* Cos(fbc + febc)yE = yB + EB * Sin(fbc + febc)vxE = vxB – wbc * EB* Sin(fbc + febc)vyE = vyB + wbc * EB* Cos(fbc + febc)axE = axB - wbc ^ 2 * EB * Cos(fbc + delt) - ebc * EB * Sin(fbc + febc)ayE = ayB - wbc ^ 2 * leb * Sin(fbc + delt) + ebc * leb * Sin(fbc + febc) Ci = lef * Cos(fef)Si = lef * Sin(fef)Cj = lfg * Cos(ffg)Sj = lfg * Sin(ffg)G1 = Ci * Sj - Cj * Siwef = (Cj * (vxG - vxE) + Sj * (vyG - vyE)) / G1wfg = (Ci * (vxG - vxE) + Si * (vyG - vyE)) / G1vxF = vxE - wef * lef * Sin(fef)vyF = vyE + wef * lef * Cos(fef)G2 = axG - axE + wef ^ 2 * Ci - wfg ^ 2 * CjG3 = ayG - ayE + wef ^ 2 * Si - wfg ^ 2 * Sjeef = (G2 * Cj + G3 * Sj) / G1efg = (G2 * Ci + G3 * Si) / G1axF = axE - eef * lef * Sin(fef) - wef ^ 2 * lef * Cos(fef)ayF = ayE + eef * lef * Cos(fef) - wef ^ 2 * lef * Sin(fef)4.计算编程Dim xA As DoubleDim yA As DoubleDim vxA As DoubleDim vyA As DoubleDim axA As Double 'A '点加速度x轴分量Dim ayA As Double 'A '点加速度y轴分量Dim xB As Double 'B'点'x轴坐标Dim yB As Double 'B点y轴坐标Dim vxB As Double 'B点速度x轴分量Dim vyB As Double 'B点速度y轴分量Dim axB As Double 'B点加速度x轴分量Dim ayB As Double 'B点加速度y轴分量Dim xC As Double 'C点x轴坐标Dim yC As Double C'点y轴坐标Dim vxC As Double 'C点速度x轴分量Dim vyC As Double 'C点速度y轴分量Dim axC As Double 'C点加速度x轴分量Dim ayC As Double 'C点加速度y轴分量Dim xD As Double 'D点x轴坐标Dim yD As Double 'D点y轴坐标Dim vxD As Double 'D点速度x轴分量Dim vyD As Double 'D点速度y轴分量Dim axD As Double 'D点加速度x轴分量Dim ayD As Double 'D点加速度y轴分量Dim xE As Double 'E点x轴坐标Dim yE As Double 'E点y轴坐标Dim vxE As Double 'E点速度x轴分量Dim vyE As Double 'E点速度y轴分量Dim axE As Double 'E点加速度x轴分量Dim ayE As Double 'E点加速度y轴分量Dim xF As Double 'F点x轴坐标Dim yF As Double 'F点y轴坐标Dim vxF As Double 'F点速度x轴分量Dim vyF As Double 'F点速度y轴分量Dim axF As Double 'F点加速度x轴分量Dim ayF As Double 'F点加速度y轴分量Dim xG As Double 'G点x轴坐标Dim yG As Double 'G点y轴坐标Dim vxG As Double 'G点速度x轴分量Dim vyG As Double 'G点速度y轴分量Dim axG As Double 'G点加速度x轴分量Dim ayG As Double 'G点加速度y轴分量Dim delt As Double ' AB杆初始转角Dim lab As Double 'AB杆长Dim lbc As Double 'BC杆长Dim lcd As Double ' CD杆长Dim lce As Double 'CE杆长Dim lef As Double 'EF杆长Dim lfg As Double 'FG杆长Dim leb As Double 'ED杆长Dim f As Double 'AB杆转角Dim fbc As Double 'BC杆转角Dim fcd As Double 'CD杆转角Dim fce As Double 'CE杆转角Dim fef As Double 'EF杆转角Dim ffg As Double 'FG杆转角Dim fge As Double 'ge杆转角Dim w As Double 'AB杆角速度Dim wbc As Double ' BC角速度Dim wcd As Double 'CD角速度Dim wce As Double 'CE角速度Dim wef As Double 'EF角速度Dim wfg As Double 'FG角速度Dim e As Double 'AB杆角加速度Dim ebc As Double ' BC杆角加速度Dim ecd As Double 'CD杆角加速度Dim ece As Double 'CE杆角加速度Dim eef As Double 'EF杆角加速度Dim efg As Double 'FG杆角加速度Dim LBD As Double 'BD距离Dim leg As Double 'EG距离Dim JCBD As Double '角CBDDim jfeg As Double '角FEGDim fBD As Double 'BD转角Dim feg As Double 'EG转角Dim Ci As DoubleDim Cj As DoubleDim Si As DoubleDim Sj As DoubleDim G1 As DoubleDim G2 As DoubleDim G3 As DoubleDim val As DoubleDim pi As DoubleDim pa As DoubleDim febc As Double '角EBCDim i As DoubleDim fj1 As DoublePrivate Sub Command1_Click() '求点E的轨迹Picture1.Scale (-300, 400)-(10, -15)Picture1.Line (-300, 0)-(10, 0) 'XPicture1.Line (0, 400)-(0, -15) 'YFor i = -300 To 0 Step 50 'X轴坐标Picture1.DrawStyle = 2Picture1.Line (i, 400)-(i, 0)Picture1.CurrentX = i - 10: Picture1.CurrentY = 0 Picture1.Print iNext iFor i = 0 To 350 Step 50 'Y轴坐标Picture1.DrawStyle = 2Picture1.Line (0, i)-(-400, i)Picture1.CurrentX = -20: Picture1.CurrentY = i + 7 Picture1.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Picture1.PSet (xE, yE)Next fj1End SubPrivate Sub Command2_Click() '求构件5的角位移Picture2.Scale (-20, 5)-(380, -0.5)Picture2.Line (-20, 0)-(380, 0) 'XPicture2.Line (0, 3)-(0, -0.5) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture2.DrawStyle = 2Picture2.Line (i, 3)-(i, 0)Picture2.CurrentX = i - 10: Picture2.CurrentY = 0 Picture2.Print iNext iFor i = -0.5 To 3 Step 0.5 'Y轴坐标Picture2.Line (0, i)-(380, i)Picture2.CurrentX = -25: Picture2.CurrentY = i Picture2.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture2.PSet (fj1, ffg)Next fj1End SubPrivate Sub Command3_Click() '求构件5的角速度Picture3.Scale (-20, 10)-(380, -10)Picture3.Line (-20, 0)-(380, 0) 'XPicture3.Line (0, 10)-(0, -10) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture3.DrawStyle = 2Picture3.Line (i, 10)-(i, -10)Picture3.CurrentX = i - 10: Picture3.CurrentY = 0 Picture3.Print iNext iFor i = -8 To 8 Step 2 'Y轴坐标Picture3.Line (0, i)-(380, i)Picture3.CurrentX = -20: Picture3.CurrentY = i Picture3.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture3.PSet (fj1, wfg)Next fj1End SubPrivate Sub Command4_Click() '求构件5的角加速度Picture4.Scale (-20, 300)-(380, -200)Picture4.Line (-20, 0)-(380, 0) 'XPicture4.Line (0, 300)-(0, -200) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture4.DrawStyle = 2Picture4.Line (i, 300)-(i, -200)Picture4.CurrentX = i - 10: Picture4.CurrentY = 0 Picture4.Print iNext iFor i = -200 To 300 Step 50 'Y轴坐标Picture4.Line (0, i)-(380, i)Picture4.CurrentX = -25: Picture4.CurrentY = i + 5 Picture4.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture4.PSet (fj1, efgNext fj1End SubPrivate Sub Form_Load() '赋初值lab = 108lce = 200lbc = 200lcd = 200lef = 320lfg = 162w = 10e = 0delt = 0xA = 0yA = 0vyA = 0axA = 0ayA = 0xD = -178.311284yD = 186.464704vxD = 0vyD = 0axD = 0ayD = 0xG = -514yG = 0vxG = 0vyG = 0axG = 0ayG = 0pi = 3.1415926pa = pi / 180febc = pa * 50End SubPrivate Sub RR1() 'RR基本杆组xB = xA + lab * Cos(f + delt)yB = yA + lab * Sin(f + delt)vxB = vxA - w * lab * Sin(f + delt)vyB = vyA + w * lab * Cos(f + delt)axB = axA - w ^ 2 * lab * Cos(f + delt) - e * lab * Sin(f + delt)ayB = ayA - w ^ 2 * lab * Sin(f + delt) + e * lab * Sin(f + delt)End SubPrivate Sub RR2() 'RR基本杆组leb = 2 * lbc * Cos(febc)xE = xB + leb * Cos(fbc + febc)yE = yB + leb * Sin(fbc + febc)vxE = vxB - wbc * leb * Sin(fbc + febc)vyE = vyB + wbc * leb * Cos(fbc + febc)axE = axB - wbc ^ 2 * leb * Cos(fbc + delt) - ebc * leb * Sin(fbc + febc) ayE = ayB - wbc ^ 2 * leb * Sin(fbc + delt) + ebc * leb * Sin(fbc + febc) End SubPrivate Sub RRR1() 'RRR基本杆组LBD = Sqr((xD - xB) ^ 2 + (yD - yB) ^ 2)If LBD > lbc + lcd And LBD < Abs(lbc - lcd) ThenIf MsgBox("RRR杆组杆长不符合要求", vbOKOnly, "提示") = 1 Then EndEnd IfElseEnd IfIf LBD < lbc + lcd And LBD > Abs(lbc - lcd) Then val = (lbc ^ 2 + LBD ^ 2 - lcd ^ 2) / (2 * lbc * LBD) JCBD = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1) ElseEnd IfIf LBD = lbc + lcd ThenJCBD = 0ElseEnd IfIf LBD = Abs(lbc - lcd) ThenIf lbc > lcd ThenJCBD = 0ElseEnd IfIf lbc < lcd ThenJCBD = piElseEnd IfElseEnd IfIf xD > xB And yD >= yB Then '第一象限fBD = Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD = xB And yD > yB ThenfBD = pi / 2ElseEnd IfIf xD < xB And yD >= yB Then '第二象限fBD = pi + Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD < xB And yD < yB Then '第三象限fBD = pi + Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD = xB And yD < yB ThenfBD = 3 * pi / 2ElseEnd IfIf xD > xB And yD <= yB Then '第四象限fBD = 2 * pi + Atn((yD - yB) / (xD - xB))ElseEnd Iffbc = fBD - JCBDxC = xB + lbc * Cos(fbc)yC = yB + lbc * Sin(fbc)If xC > xD And yC >= yD Then '第一象限fcd = Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC = xD And yC >= yD Thenfcd = pi / 2ElseEnd IfIf xC < xD And yC >= yD Then '第二象限fcd = pi + Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC < xD And yC < yD Then '第三象限fcd = pi + Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC = xD And yC < yD Thenfcd = 3 * pi / 2ElseEnd IfIf xC > xD And yC <= yD Then '第四象限fcd = 2 * pi + Atn((yC - yD) / (xC - xD))ElseEnd IfCi = lbc * Cos(fbc)Si = lbc * Sin(fbc)Cj = lcd * Cos(fcd)Sj = lcd * Sin(fcd)G1 = Ci * Sj - Cj * Siwbc = (Cj * (vxD - vxB) + Sj * (vyD - vyB)) / G1 wcd = (Ci * (vxD - vxB) + Si * (vyD - vyB)) / G1 vxC = vxB - wbc * lbc * Sin(fbc)vyC = vyB + wbc * lbc * Cos(fbc)G2 = axD - axB + wbc ^ 2 * Ci - wcd ^ 2 * CjG3 = ayD - ayB + wbc ^ 2 * Si - wcd ^ 2 * Sj ebc = (G2 * Cj + G3 * Sj) / G1ecd = (G2 * Ci + G3 * Si) / G1axC = axB - ebc * lbc * Sin(fbc) - wbc ^ 2 * lbc * Cos(fbc)ayC = ayB + ebc * lbc * Cos(fbc) - wbc ^ 2 * lbc * Sin(fbc)End SubPrivate Sub RRR2() 'RRR基本杆组leg = Sqr((xG - xE) ^ 2 + (yG - yE) ^ 2)If leg > lef + lfg And leg < Abs(lef - lfg) ThenIf MsgBox("RRR杆组杆长不符合要求", vbOKOnly, "提示") = 1 Then EndElseEnd IfElseEnd IfIf leg < lef + lfg And leg > Abs(lef - lfg) Thenval = (lef ^ 2 + leg ^ 2 - lfg ^ 2) / (2 * lef * leg)jfeg = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1)ElseEnd IfIf leg = lef + lfg Thenjfeg = 0ElseEnd IfIf leg = Abs(lef - lfg) ThenIf lef > lfg Thenjfeg = 0ElseEnd IfIf lef < lfg Thenjfeg = piElseEnd IfElseEnd IfIf xG > xE And yG >= yE Then '第一象限feg = Atn((yG - yE) / (xG - xE))ElseEnd IfIf xG = xE And yG > yE Thenfeg = pi / 2ElseEnd IfIf xG < xE And yG >= yE Then '第二象限feg = pi + Atn((yG - yE) / (xG - xE))ElseEnd IfIf xG < xE And yG < yE Then '第三象限feg = pi + Atn((yG - yE) / (xG - xE)) ElseEnd IfIf xG = xE And yG < yE Thenfeg = 3 * pi / 2ElseEnd IfIf xG > xE And yG <= yE Then '第四象限feg = 2 * pi + Atn((yG - yE) / (xG - xE)) ElseEnd Iffef = feg - jfegxF = xE + lef * Cos(fef)yF = yE + lef * Sin(fef)If xF > xG And yF >= yG Then '第一象限ffg = Atn((yF - yG) / (xF - xG))ElseEnd IfIf xF = xG And yF >= yG Thenffg = pi / 2ElseEnd IfIf xF < xG And yF >= yG Then '第二象限ffg = pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfIf xF < xG And yF < yG Then '第三象限ffg = pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfIf xF = xG And yF < yG Thenffg = 3 * pi / 2ElseEnd IfIf xF > xG And yF <= yG Then '第四象限ffg = 2 * pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfCi = lef * Cos(fef)Si = lef * Sin(fef)Cj = lfg * Cos(ffg)Sj = lfg * Sin(ffg)G1 = Ci * Sj - Cj * Siwef = (Cj * (vxG - vxE) + Sj * (vyG - vyE)) / G1wfg = (Ci * (vxG - vxE) + Si * (vyG - vyE)) / G1vxF = vxE - wef * lef * Sin(fef)vyF = vyE + wef * lef * Cos(fef)G2 = axG - axE + wef ^ 2 * Ci - wfg ^ 2 * CjG3 = ayG - ayE + wef ^ 2 * Si - wfg ^ 2 * Sjeef = (G2 * Cj + G3 * Sj) / G1efg = (G2 * Ci + G3 * Si) / G1axF = axE - eef * lef * Sin(fef) - wef ^ 2 * lef * Cos(fef)ayF = ayE + eef * lef * Cos(fef) - wef ^ 2 * lef * Sin(fef)End Sub5.结果及分析图1 E点的运动轨迹(1)由图1所示,E点的运动轨迹呈稍倾斜“8字形”。
哈工大机械原理大作业1 连杆机构运动分析 牛头刨床 学号5号

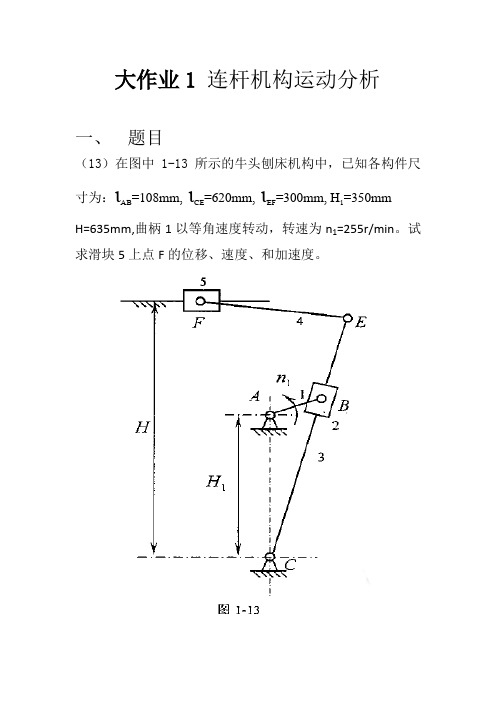
大作业1 连杆机构运动分析运动分析题目图1-13 牛头刨床机构简图一、按比例画出机构运动简图见A3图纸二、机构的结构分析及基本杆组的划分(1)机构的结构分析该机构为平面连杆机构,活动构件数n=5;有A、B、C、E、F五个转动副和B、F两个移动副,没有高副,故低副数PL=7,高副数PH=0。
机构的自由度F=3n-2PL-PH=3*5-2*7=1。
机构有确定运动轨迹。
(2)基本杆组的划分图1-13中,原动件构件1为Ⅰ级杆组,移除之后按照拆杆组法对机构进行拆分,可得由滑块2和杆3组成的RPRⅡ级杆组,以及由杆4和滑块5组成的RRPⅡ级杆组。
拆分图如下:图1-13-1 Ⅰ级杆组图1-13-2 RPRⅡ级杆组图1-13-3 RRPⅡ级杆组三、各杆组的运动分析数学模型图1-13-1 Ⅰ级杆组 x B =x A +l AB cos ϕy B =y A +l AB sin ϕ图1-13-2 RPR Ⅱ级杆组 x E =x B +(l CE -s)cos ϕj y E =y B +(l CE -s)sin ϕjϕj =arctan(B 0/A 0)A 0=xB -x CB 0=y B -y CS =2020B A + 图1-13-3 RRP Ⅱ级杆组F 的位置 x F =x E -l EF cos ϕiy F =y E +l EF sin ϕi ϕi =arcsin(A 1/l EF )A 1=H-H 1-y EF 的速度F 的加速度四、建立坐标系以A 为原点建立坐标系,则A (0,0)五、编程使用MATLAB 编写程序如下lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);a=0:0.001:0.5;xF=subs(xF,t,a);plot(a,xF)title('位移x随时间t变化图像') xlabel('t(s)'),ylabel(X')lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);vF=diff(xF,t);a=0:0.001:0.5;vF=subs(vF,t,a);plot(a,vF)title('速度v随时间t变化图像') xlabel('t(s)'),ylabel(V')lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);aF=diff(xF,t,2);a=0:0.001:0.5;aF=subs(aF,t,a);plot(a,aF)title('加速度a随时间t变化图像') xlabel('t(s)'),ylabel(A')六、位移、速度、加速度图像位移xE随时间t变化图像速度vE随时间t变化图像加速度aE随时间t变化图像七、运动分析由MATLAB编程后绘制所得图线分析可知,牛头刨床的刨头F行程约为500mm,在0.06s~0.17s之间速度和加速度波动较大,在0.17s~0.29s 之间速度和加速度波动较小,这就保证了刨头在空行程时有急回运动,而在工作行程是由较均匀的切削速度,运动连续,且运动性能良好稳定。
哈工大机械原理大作业——连杆机构运动分析16___2014

Harbin Institute of Technology机械原理大作业——连杆机构运动分析课程名称:机械原理院系:能源科学与工程学院班级:完成者:学号:题号: 16任课教师:丁刚完成内容:在完成题目计算要求的同时,扩展了内容,程序为该结构的通用程序,可解决机构在不同条件下的运动情况,文本最末为几种情况的分析哈尔滨工业大学16、如图所示机构,已知机构各构件的尺寸为,试求构件5的角位移、角速度和角加速度,并对计算结构进行分析。
(1)、结构分析从侧面看原机构为此机构分为级杆组(原动件1),级杆组RRP(2号套筒、3号杆),级杆组RRP(4号套筒、5号杆)(2)、建立坐标系(3)、各个杆组的运动分析采用逆推法,从RRP杆组(4号套筒、5号杆)开始分析已知,,,,现在假定已知,,其中,,,即消去,可得可求得,也可以通过书上3-23式求得通过正弦定理可求得再来看看角速度关系对于加速度,有如下关系其中到此4、5杆就分析完毕了,别忘记之前的假设,我假设了已知,,为求,,,现在来分析RRP杆组(2号套筒、3号杆)已知,,,已知,,,,其中,,,即消去,可得反解,即可求得,也可以通过书上3-23式求得通过正弦定理可求得继续,我们来看看角速度关系对于加速度,有如下关系其中现在,只需将所求得的,,和,,关联起来这是同一根杆,,,现在来看,,,由题目得,,和是未知的,但不影响整体,不然给一个初值,,当然,这是可以随意更改的。
基于以上的基本原理,matlab R2012b程序如下syms theta theta1 theta2 lamuda lamuda1 lamuda2 sigma sigma1 sigma2 beta beta1 beta2 l1 l11 l2 l21 t output itheta1=10;theta2=0;i=0;for theta3=60:420theta=theta3/180*pi;beta=asin((100/200)*sin(theta))+theta;l1=0.2*sin(beta)/sin(theta);beta1=(-theta1*(l1*sin(theta))*sin(theta)+theta1*(l1*cos(theta))*cos(theta))/(0.2*(sin(theta)*sin(b eta)+cos(theta)*cos(beta)));l11=-(theta1*(l1*sin(theta))*l1*cos(beta)+theta1*(l1*cos(theta))*l1*sin(beta))/(0.2*(sin(theta)*si n(beta)+cos(theta)*cos(beta)));C=(theta1^2)*0.2*cos(beta)-theta2*l1*sin(theta)-(theta1^2)*l1*cos(theta)-2*l11*theta1*sin(theta) ;D=(theta1^2)*0.2*cos(beta)+theta2*l1*sin(theta)-(theta1^2)*l1*cos(theta)+2*l11*theta1*sin(thet a);beta2=(-C*sin(theta)+D*cos(theta))/(0.2*(sin(theta)*sin(beta)+cos(theta)*cos(beta)));lamuda=beta-pi/2;lamuda1=beta1;lamuda2=beta2;sigma=asin((100/200)*sin(lamuda))+lamuda;l2=0.2*sin(sigma)/sin(lamuda);sigma1=(-lamuda1*(l2*sin(lamuda))*sin(lamuda)+lamuda1*(l2*cos(lamuda))*cos(lamuda))/(0.2 *(sin(lamuda)*sin(sigma)+cos(lamuda)*cos(sigma)));l21=-(lamuda1*(l2*sin(lamuda))*l2*cos(sigma)+lamuda1*(l2*cos(lamuda))*l2*sin(sigma))/(0.2* (sin(lamuda)*sin(sigma)+cos(lamuda)*cos(sigma)));A=(lamuda1^2)*0.2*cos(sigma)-lamuda2*l2*sin(lamuda)-(lamuda1^2)*l2*cos(lamuda)-2*l21*la muda1*sin(lamuda);B=(lamuda1^2)*0.2*cos(sigma)+lamuda2*l2*sin(lamuda)-(lamuda1^2)*l2*cos(lamuda)+2*l21*l amuda1*sin(lamuda);sigma2=(-A*sin(lamuda)+B*cos(lamuda))/(0.2*(sin(lamuda)*sin(sigma)+cos(lamuda)*cos(sigma )));i=i+1;output(i,1)=fix(theta/pi*180);output(i,2)=fix(sigma/pi*180);output(i,3)=fix(sigma1);output(i,4)=fix(sigma2);endoutputa=output(:,1);b=output(:,2);c=output(:,3);d=output(:,4);h1=plot(a,b);hold on;h2=plot(a,c);hold on;h3=plot(a,d);hold on;set(h1,'color',[1 0 0],'linewidth',2);set(h2,'color',[0 1 1],'linewidth',1);set(h3,'color',[0 0 1],'linewidth',2);m=legend('角位移','角速度','角加速度');x label('θ');title('平面连杆机构运动分析');figure;h1=plot(a,b);hold on;x label('θ');ylabel('角位移');title('平面连杆机构运动角度——角位移图');figure;h2=plot(a,c);hold on;x label('θ');ylabel('角速度');title('平面连杆机构运动角度——角速度图'); figure;h3=plot(a,d);hold on;x label('θ');ylabel('角加速度');title('平面连杆机构运动角度——角加速度图');汇总图各自的图像结果分析,上面的图形只是在一个初值,的条件下得出的,为了能解决所有问题,修改程序如下syms theta theta1 theta2 lamuda lamuda1 lamuda2 sigma sigma1 sigma2 beta beta1 beta2 l1 l11 l2 l21 t output iprompt={'输入:', '输入' ,'输入' };%设置提示字符串name='输入初值';%设置标题 numlines=1;%指定输入数据的行数 defAns={'60','10','0'};%设定默认值 Resize='on';%设定对话框尺寸可调节answer=inputdlg(prompt,name,numlines,defAns,'on');%创建输入对话框 h= str2num(answer{1}); theta1= str2num(answer{2}); theta2= str2num(answer{3}); i=0;for theta3=h:(360+h) theta=theta3/180*pi;beta=asin((100/200)*sin(theta))+theta; l1=0.2*sin(beta)/sin(theta);beta1=(-theta1*(l1*sin(theta))*sin(theta)+theta1*(l1*cos(theta))*cos(theta))/(0.2*(sin(theta)*sin(b eta)+cos(theta)*cos(beta)));l11=-(theta1*(l1*sin(theta))*l1*cos(beta)+theta1*(l1*cos(theta))*l1*sin(beta))/(0.2*(sin(theta)*si n(beta)+cos(theta)*cos(beta)));C=(theta1^2)*0.2*cos(beta)-theta2*l1*sin(theta)-(theta1^2)*l1*cos(theta)-2*l11*theta1*sin(theta) ;D=(theta1^2)*0.2*cos(beta)+theta2*l1*sin(theta)-(theta1^2)*l1*cos(theta)+2*l11*theta1*sin(thet a);beta2=(-C*sin(theta)+D*cos(theta))/(0.2*(sin(theta)*sin(beta)+cos(theta)*cos(beta)));lamuda=beta-pi/2;lamuda1=beta1;lamuda2=beta2;sigma=asin((100/200)*sin(lamuda))+lamuda;l2=0.2*sin(sigma)/sin(lamuda);sigma1=(-lamuda1*(l2*sin(lamuda))*sin(lamuda)+lamuda1*(l2*cos(lamuda))*cos(lamuda))/(0.2 *(sin(lamuda)*sin(sigma)+cos(lamuda)*cos(sigma)));l21=-(lamuda1*(l2*sin(lamuda))*l2*cos(sigma)+lamuda1*(l2*cos(lamuda))*l2*sin(sigma))/(0.2* (sin(lamuda)*sin(sigma)+cos(lamuda)*cos(sigma)));A=(lamuda1^2)*0.2*cos(sigma)-lamuda2*l2*sin(lamuda)-(lamuda1^2)*l2*cos(lamuda)-2*l21*la muda1*sin(lamuda);B=(lamuda1^2)*0.2*cos(sigma)+lamuda2*l2*sin(lamuda)-(lamuda1^2)*l2*cos(lamuda)+2*l21*l amuda1*sin(lamuda);sigma2=(-A*sin(lamuda)+B*cos(lamuda))/(0.2*(sin(lamuda)*sin(sigma)+cos(lamuda)*cos(sigma )));i=i+1;output(i,1)=fix(theta/pi*180);output(i,2)=fix(sigma/pi*180);output(i,3)=fix(sigma1);output(i,4)=fix(sigma2);endoutputa=output(:,1);b=output(:,2);c=output(:,3);d=output(:,4);h1=plot(a,b);hold on;h2=plot(a,c);hold on;h3=plot(a,d);hold on;set(h1,'color',[1 0 0],'linewidth',2);set(h2,'color',[0 1 1],'linewidth',1);set(h3,'color',[0 0 1],'linewidth',2);m=legend('角位移','角速度','角加速度');x label('θ');title('平面连杆机构运动分析');figure;h1=plot(a,b);hold on;xlabel('θ');y label('角位移');title('平面连杆机构运动角度——角位移图');figure;h2=plot(a,c);hold on;xlabel('θ');y label('角速度');title('平面连杆机构运动角度——角速度图');figure;h3=plot(a,d);hol d on;xlabel('θ');y label('角加速度');title('平面连杆机构运动角度——角加速度图');这样,在运行程序时就会弹出一个如下图所示的对话框,可以任意给定初值,解决不同问题。
机械原理大作业1(连杆机构)27题
3)已知F点和G点的运动参数可求出杆5的角位移、角速度、角加速度。
6、
1)F点的运动参数
图8点F的运动轨迹
图9点F的x坐标和y坐标随杆AB角位移的变化
图10点F的速度在x和y方向的分量随杆AB的角位移的变化
xc=ones(1,3601);%给点Cx坐标赋初值
yc=ones(1,3601);%给点Cy坐标赋初值
ci=ones(1,3601);%给中间变量赋初值
cj=ones(1,3601);%给中间变量赋初值
wi=ones(1,3601);%给杆BC的角速度赋初值
wj=ones(1,3601);%给杆CD的角速度赋初值
axb=-w*w*xb;%点B的加速度在x方向的分量
ayb=-w*w*yb;%点B的加速度在y方向的分量
xd=0;%点D的x坐标
yd=160;%点D的y坐标
vxd=0;%点D的速度在x方向的分量
vyd=0;%点D的速度在y方向的分量
axd=0;%点D的加速度在x方向的分量
ayd=0;%点D的加速度在y方向的分量
1)位置方程
为求解上式,应先求出 或 ,将上式移相后分别平方相加,消去 得
式中:
其中, 。
为保证机构的装配,必须同时满足
和
解三角方程式 可求得
上式中,“+”表示B、C、D三个运动副为顺时针排列;“—”表示B、C、D为逆时针排列。
将 代入 中可求得 ,而后即可求得
2)速度方程
将式 对时间求导可得两杆的角速度 为
elseif lbd(1,m)==(li+lj)
哈工大机械原理大作业
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业一课程名称:机械原理设计题目:连杆机构运动分析院系:机电学院班级: 1208105分析者:殷琪学号:指导教师:丁刚设计时间:哈尔滨工业大学设计说明书1 、题目如图所示机构,一只机构各构件的尺寸为AB=100mm,BC=4.28AB,CE=4.86AB,BE=8.4AB,CD=2.14AB,AD=4.55AB,AF=7AB,DF=3.32AB,∠BCE=139?。
构件1的角速度为ω1=10rad/s,试求构件2上点E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
2、机构结构分析该机构由6个构件组成,4和5之间通过移动副连接,其他各构件之间通过转动副连接,主动件为杆1,杆2、3、4、5为从动件,2和3组成Ⅱ级RRR基本杆组,4和5组成Ⅱ级RPR 基本杆组。
如图建立坐标系3、各基本杆组的运动分析数学模型1) 位置分析2) 速度和加速度分析 将上式对时间t 求导,可得速度方程:将上式对时间t 求导,可得加速度方程:RRR Ⅱ级杆组的运动分析如下图所示 当已知RRR 杆组中两杆长L BC 、L CD 和两外副B 、D 的位置和运动时,求内副C的位置、两杆的角位置、角运动以及E 点的运动。
1) 位置方程由移项消去j ϕ后可求得i ϕ:式中,可求得j ϕ:E 点坐标方程:其中2) 速度方程两杆角速度方程为式中,点E 速度方程为3) 加速度方程两杆角加速度为式中,点E 加速度方程为RPR Ⅱ级杆组的运动分析(1) 位移方程(2)速度方程其中(3)加速度方程4、 计算编程利用MATLAB 软件进行编程,程序如下:% 点B 和AB 杆运动状态分析>>r=pi/180;w 1=10;e 1=0;l 1=100;Xa=0;Ya=0;Vax=0;Vay=0;aax=0;aay=0;f1=0:1: 360;% B 点位置Xb=Xa+l1*cos(r*f1);Yb=Ya+l1*sin(r*f1);% B点速度Vbx=Vax-w1*l1*sin(r*f1);Vby=Vay+w1*l1*cos(r*f1);% B点加速度abx=aax-l1*w1.^2.*cos(r*f1);aby=aay-l1*w1.^2.*sin(r*f1);% RRR2级杆组运动分析% 输入D点参数l2=428;l3=214;Xd=455;Yd=0;Vdx=0;Vdy=0;adx=0;ady=0;% 计算E点、2杆、3杆运动参数lbe=840;lce=486;a0=2*l2*(Xd-Xb);b0=2*l2*(Yd-Yb);c0=l2^2+(Xb-Xd).^2+(Yb-Yd).^2-l3^2;f2=2*atan((b0+sqrt(a0.^2+b0.^2-c0.^2))./(a0+c0)); % C点位置Xc=Xb+l2*cos(f2);Yc=Yb+l2*sin(f2);% 2杆、3杆运动参数计算dX=Xc-Xd;dY=Yc-Yd;for n=1:length(dX)if dX(n)>0&dY(n)>=0f3(n)=atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)>0f3(n)=pi/2;elseif dX(n)<0&dY(n)>=0f3(n)=pi+atan(dY(n)/dX(n));elseif dX(n)<0&dY(n)<0f3(n)=pi+atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)<0f3(n)=1.5*pi;elseif dX(n)>0&dY(n)<0f3(n)=2*pi+atan(dY(n)/dX(n));endendC2=l2*cos(f2);C3=l3*cos(f3);S2=l2*sin(f2);S3=l3*sin(f3);G1=C2.*S3-C3.*S2;w2=(C3.*(Vdx-Vbx)+S3.*(Vdy-Vby))./G1;w3=(C2.*(Vdx-Vbx)+S2.*(Vdy-Vby))./G1;G2=adx-abx+(w2.^2).*C2-(w3.^2).*C3;G3=ady-aby+(w2.^2).*S2-(w3.^2).*S3;e2=(G2.*C3+G3.*S3)./G1;% E点位置w=acos((l2^2+lbe^2-lce^2)/(2*l2*lbe));Xe=Xb+lbe*cos(f2-w);Ye=Yb+lbe*sin(f2-w);Vex=Vbx-lbe*w2.*sin(f2-w);Vey=Vby+lbe*w2.*cos(f2-w);aex=abx-lbe*(e2.*sin(f2-w)+w2.^2.*cos(f2-w));aey=aby+lbe*(e2.*cos(f2-w)-w2.^2.*sin(f2-w));% 计算杆5运动参数Xf=646.2912088;Yf=-268.9008617;l5=sqrt((Xe-Xf).^2+(Ye-Yf).^2);dX=Xe-Xf;dY=Ye-Yf;for n=1:length(dX)if dX(n)>0&dY(n)>=0f5(n)=atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)>0f5(n)=pi/2;elseif dX(n)<0&dY(n)>=0f5(n)=pi+atan(dY(n)/dX(n));elseif dX(n)<0&dY(n)<0f5(n)=pi+atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)<0f5(n)=1.5*pi;elseif dX(n)>0&dY(n)<0f5(n)=2*pi+atan(dY(n)/dX(n));endendw5=(-Vex.*sin(f5)+Vey.*cos(f5))./l5;a5=(-aex.*sin(f5)+aey.*cos(f5))./l5;% 画出各参数曲线figure(1);plot(Xe,Ye,'k');xlabel('Xe/\mm');ylabel('Ye/mm');grid on;title('E点位置');figure(2);plot(f1,f5,'k');xlabel('f/\circ');ylabel('f5/\circ');grid on;title('5杆角位移');figure(3);plot(f1,w5,'k');xlabel('f/\circ');ylabel('w5/rad/s');grid on;title('5杆角速度');figure(4);plot(f1,a5,'k');xlabel('f/\circ');ylabel('a5/rad/s2');gridon;title('5杆角加速度');Warning: Unable to interpret TeX string "Xe/\mm"5、计算结果图一:E点的运动轨迹图二:5杆角位移图三:5杆角速度图四:5杆角加速度6、计算结果分析由E点位置图像可看出,构件4做周期往复运动,由图二、三、四可看出,构件5的角位移、角速度、角加速度均成周期性变化。
哈工大机械原理大作业连杆
哈工大机械原理大作业-连杆连杆是机械原理中常见的机构之一,也是机械工程中非常重要的部件。
它由两个旋转接头和一个连接两个旋转接头的杆件组成。
连杆广泛应用于各种机械设备中,如汽车发动机、泵、机床等。
本文将介绍连杆的工作原理、应用以及设计要点。
连杆的工作原理是将旋转运动转化为直线运动或将直线运动转化为旋转运动。
它通过两个旋转接头的运动将杆件上的一个点的运动转化为另一个点的运动。
连杆的运动有两种基本形式:一是曲柄连杆机构,二是摇杆连杆机构。
曲柄连杆机构中,一个旋转接头为曲柄,另一个旋转接头为连杆;摇杆连杆机构中,一个旋转接头为摇杆,另一个旋转接头为连杆。
连杆广泛应用于各种机械设备中。
在汽车发动机中,连杆将曲轴的旋转运动转化为活塞的直线运动,从而驱动汽缸的工作;在泵中,连杆将电机的旋转运动转化为柱塞的直线运动,从而产生压力;在机床中,连杆将电机的旋转运动转化为工作台的直线运动,从而实现加工。
设计连杆时需要考虑一些要点。
首先是连杆的材料选择和尺寸设计。
连杆需要承受较大的力和扭矩,因此需要选择具有较高强度和刚度的材料。
同时,根据应用需求和力学原理,设计连杆的尺寸,以确保其能够承受正常工作条件下的负荷。
其次是连杆的润滑和密封。
连杆在工作过程中需要润滑剂来减少摩擦和磨损,同时需要密封装置来防止润滑剂泄漏。
因此,设计连杆时需要考虑润滑剂的供给和密封装置的设计。
最后是连杆的制造和装配。
连杆的制造需要保证其精度和质量,以确保其运转平稳和可靠。
在装配过程中,需要按照设计要求进行装配,同时进行必要的调试和检测,以确保连杆的工作性能符合要求。
总之,连杆是机械工程中非常重要的部件,广泛应用于各种机械设备中。
设计和制造连杆需要考虑材料选择、尺寸设计、润滑和密封以及制造和装配等方面的要点。
通过合理的设计和制造,可以确保连杆的工作性能和可靠性,从而提高机械设备的工作效率和寿命。
哈工大-机械原理大作业-连杆机构运动分析

机械原理大作业(一)作业名称:连杆机构运动分析设计题目: 20院系:英才学院班级: XXXXXXX设计者:邵广斌学号: XXXXXXXXXX指导教师:林琳设计时间: 2013年05月19日哈尔滨工业大学机械设计1.运动分析题目如图所示机构,已知机构各构件的尺寸为150AB mm =,97β=︒,400BC mm =,300CD mm =,320AD mm =,100BE mm =,230EF mm =,400FG mm =,构件1的角速度为110/rad s ω=,试求构件2上点F 的轨迹及构件5上点G 的位移、速度和加速度,并对计算结果进行分析。
2. 机构分析该机构由原动件AB (Ⅰ级杆组)、BCD (RRR Ⅱ级杆组)和FG (RRP Ⅱ级杆组)组成。
3. 建立坐标系如图3,建立以定点A 为原点的平面直角坐标系A-xy 。
图1 运动机构结构图4. 运动分析数学模型4.1 原动件AB原动件AB 的转角: 10~2ψπ= 原动件AB 的角速度:110/rad s ω=原动件AB 的角加速度: 10α= 运动副A 的位置坐标: 0A x = 0A y =运动副A 的速度: 0xA v = 0yA v = 运动副A 的加速度: 0xA a = 0yA a =原动件AB 长度:150AB l mm =运动副B 的位置坐标: 1B A AB x x l cos ψ=+1B A AB y x l sin ψ=+运动副B 的速度: 11 xB xA AB v v l sin ωψ=-11 yB yA AB v v l cos ωψ=+运动副B 的加速度: 2 1111 xBxA AB AB a a l cos l sin ωψαψ=--21111yB yA AB AB a a l sin l cos ωψαψ=-+4.2 RRR Ⅱ级杆组BCD运动副D 的位置坐标: 320D x mm = 0D y = 运动副D 的速度: 0xD v = 0yD v = 运动副D 的加速度: 0xD a = 0yD a = 杆BC 长度: 400BC l mm = 杆CD 长度:300CD l mm =BC 相对于x 轴转角:200ψ=其中02BC D B A l x x =-() 0 2 BC D B B l y y =-()2220B B C C l C l D l D =+- 222())(BDD B D B l x x y y =-+- CD 相对于x 轴转角: 3C DC Dy y arctanx x ψ-=-求导可得BC 角速度2ω、角加速度2α以及CD 角速度3ω、角加速度3α。
哈工大机械原理大作业连杆机构运动分析29

机械原理大作业一课程名称:机械原理设计题目:连杆机构运动分析-29院系:机电工程学院班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学一、设计题目(29)二、VB编程得到动画、轨迹、位移、速度、加速度线图1.用VB编写程序得到的机构动画2.构件2上的E点轨迹4.构件7的速度线图三、计算说明书(一)建立机构运动分析数学模型对机构进行结构分析,找出基本杆组1.基本杆组划分a)杆件1为原动件b)构件2、3为RRR型II级杆组c)构件4、5为RRR型II级杆组d)构件6、7为RRP型II级杆组2.结构分析与自由度计算机构为平面连杆机构,活动构件数n=7,L P =10,转动副为9个,移动副为1个,高副为0个,则机构自由度为F=3n-2P L -P H =3x7-2x10=1。
各基本杆组的运动分析数学模型1.原动件(I 级构件)图1(1)位置分析B 点位置方程cos sin B A i iBA i i x x l y y l ϕϕ=+⎧⎨=+⎩ (1-1)(2)速度分析把(1-1)对时间t 求导得B 速度方程sin cos B B A i i i BB A i i i dx x x l dt dy y y l dt ϕϕϕϕ⎫==-⎪⎪⎬⎪==+⎪⎭g g g g g g (1-2)(3)加速度分析把(2-2)对时间他求导得B 加速度方程222222cos sin sin cos B B A i i i i i i BB A i i i i i i d x x x l l dt d y y y l l dt ϕϕϕϕϕϕϕϕ⎫==--⎪⎪⎬⎪==-+⎪⎭g g g g g g g g g g g g g g (1-3) 上式中 i i d dt ϕϕω==g22i i d dtϕϕα==g g 2. RRR 杆组的运动分析3.RRP杆组的运动分析图2(1) 位置分析内运动副C 的位置方程cos cos sin sin sin cos C B i i K j j jCB i i K j j j x x l x s l y y l y s l ϕϕϕϕϕϕ=+=+-⎧⎪⎨=+=++⎪⎩ (2-1)i l 的转角 0arcsin()ji j iA l l ϕϕ+=+ (2-2)式中0()sin ()cos B k j B K j A x x y y ϕϕ=---满足装配条件0j i A l l +≤ 滑块D 相对参考点K 的位移为sin cos cos sin C k j jC K j jjjx x l y y l s ϕϕϕϕ-+--==(2-3)滑块D 的位置方程 cos sin D K iD K ix x s y y s ϕϕ=+⎧⎨=+⎩ (2-4)(2) 速度分析杆i l 的角速度123sin cos j ji i Q Q Q ϕϕωϕ-+==g(2-5)滑块D 沿导路的移动速度 123cos sin i i i iQ l Q l s Q ϕϕ-+=g(2-6)式中1(sin cos )K B j j j j Q x x s l ϕϕϕ=--+ggg2(cos sin )K B j j j j Q y y s l ϕϕϕ=-+-g g g3sin sin cos cos i i j i i j Q l l ϕϕϕϕ=+内运动副C 的速度为sin cos C B i i iC B i i ix x l y y l ϕϕϕϕ⎧=-⎪⎨⎪=+⎩gg gg g g (2-7)外移动副D 的速度为cos sin sin cos D K i j jD K i j j x x s s y y s s ϕϕϕϕϕϕ⎧=+-⎪⎨⎪=++⎩gg g g g g g g(2-8) (3) 加速度分析 杆i l 的角加速度453sin s j ji i Q Q co Q ϕϕεϕ-+==g g(2-9)滑块D 沿导路移动的加速度为453cos sin i i i i Q l Q l s Q ϕϕ--=g g (2-10) 式中224cos (sin cos )(cos sin )2sin K B i i i j j j j j j j j j j Q x x l s l s l s ϕϕϕϕϕϕϕϕϕϕ=-+-+---g g g g g g g g g g225sin (cos sin )(sin cos )2cos K B i i i j j j j j j j j j j Q y y l s l s l s ϕϕϕϕϕϕϕϕϕϕ=-++--++g g g g g g g g g g内运动副C 的加速度22cos sin sin cos C B i i i j i j C B i i i j i jx x l l y y l l ϕϕϕϕϕϕϕϕ⎧=--⎪⎨⎪=-+⎩g gg g g g g g gg g g g g(2-11) 滑块D 的加速度22cos sin cos 2sin sin cos sin 2cos D K j j j j j j jD K j j j j j j jx x s s s s y y s s s s ϕϕϕϕϕϕϕϕϕϕϕϕϕϕ⎧=+---⎪⎨⎪=++-+⎩g g g g g g g g g g gg g g g g g g gg g g(2-12) 以上为基本杆组的通用分析,根据已知条件进行赋值均在程序中体现(二) 计算流程框图(见下页)(三)VB编写程序清单'定义变量Dim xA As Double 'A点的坐标、速度、加速度Dim yA As DoubleDim vxA As DoubleDim vyA As DoubleDim axA As DoubleDim ayA As DoubleDim xB As Double 'B点Dim yB As DoubleDim vxB As DoubleDim vyB As DoubleDim axB As DoubleDim ayB As DoubleDim xD As Double 'D点Dim yD As DoubleDim vxD As DoubleDim vyD As DoubleDim axD As DoubleDim ayD As DoubleDim xE As Double 'E点Dim yE As DoubleDim vxE As DoubleDim vyE As DoubleDim axE As DoubleDim ayE As DoubleDim xG As Double 'G点Dim yG As DoubleDim vxG As DoubleDim vyG As DoubleDim axG As DoubleDim ayG As DoubleDim xH As Double 'H点Dim yH As DoubleDim vxH As DoubleDim vyH As DoubleDim axH As DoubleDim ayH As DoubleDim xM As Double 'M点Dim yM As DoubleDim vxM As DoubleDim vyM As DoubleDim axM As DoubleDim xN As Double '参考点NDim yN As DoubleDim vxN As DoubleDim vyN As DoubleDim axN As DoubleDim ayN As DoubleDim xK As Double 'K点Dim yK As DoubleDim vxK As DoubleDim vyK As DoubleDim axK As DoubleDim ayK As DoubleDim delt1 As Double 'AB杆初始转角Dim L1 As Double 'AB杆长Dim f1 As Double 'AB杆转角Dim w1 As Double 'AB杆角速度Dim e1 As Double 'AB杆角加速度Dim L2 As Double 'BC杆Dim f2 As DoubleDim w2 As DoubleDim e2 As DoubleDim L3 As Double 'CD杆Dim f3 As DoubleDim w3 As DoubleDim e3 As DoubleDim LBE As Double 'BE杆Dim delt2 As DoubleDim L4 As Double 'EF杆Dim f4 As DoubleDim w4 As DoubleDim e4 As DoubleDim LFG As Double 'FG杆Dim f5 As DoubleDim w5 As DoubleDim e5 As DoubleDim deltGH As Double 'GH杆Dim LGH As DoubleDim L6 As Double 'HM(HK)杆Dim f6 As DoubleDim w6 As DoubleDim e6 As DoubleDim Lj As Double 'MK杆Dim wj As DoubleDim ej As DoubleDim ss As Double '移动副K的位移Dim vss As Double '移动副K的速度Dim ass As Double '移动副K的加速度Dim pi As DoubleDim pa As DoubleDim i As DoubleDim fj1 As DoublePrivate Sub Command1_Click() '点E的轨迹Picture1.Scale (-50, 250)-(600, -100)Picture1.Line (-50, 0)-(600, 0) 'XPicture1.Line (0, 250)-(0, -100) 'YFor i = -50 To 600 Step 50 'X轴坐标Picture1.DrawStyle = 2Picture1.Line (i, 250)-(i, -100)Picture1.CurrentX = i - 0: Picture1.CurrentY = 0 Picture1.Print iNext iFor i = -100 To 250 Step 50 'Y轴坐标Picture1.DrawStyle = 2Picture1.Line (-50, i)-(600, i)Picture1.CurrentX = -20: Picture1.CurrentY = i + 7 Picture1.Print iNext iFor fj1 = 0 To 360 Step 0.01f1 = fj1 * paCall RR1Call RRR1Call RR2Picture1.PSet (xE, yE)Next fj1End SubPrivate Sub Command2_Click() '求点G的位移Picture2.Scale (-20, 300)-(380, 200)Picture2.Line (-20, 0)-(380, 0) 'XPicture2.Line (0, 300)-(0, 200) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture2.DrawStyle = 2Picture2.Line (i, 300)-(i, 0)Picture2.CurrentX = i - 10: Picture2.CurrentY = 0Picture2.Print iNext iFor i = 200 To 300 Step 10 'Y轴坐标Picture2.Line (0, i)-(380, i)Picture2.CurrentX = -25: Picture2.CurrentY = i Picture2.Print iNext iFor fj1 = 0 To 360 Step 0.01f1 = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Call RR3Call RRP1Picture2.PSet (fj1, ss)Next fj1End SubPrivate Sub Command3_Click() '求点G的速度Picture3.Scale (-30, 600)-(380, -600)Picture3.Line (-30, 0)-(380, 0) 'XPicture3.Line (0, 600)-(0, -600) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture3.DrawStyle = 2Picture3.Line (i, 600)-(i, -600)Picture3.CurrentX = i - 10: Picture3.CurrentY = 0 Picture3.Print iNext iFor i = -600 To 600 Step 50 'Y轴坐标Picture3.Line (0, i)-(380, i)Picture3.CurrentX = -28: Picture3.CurrentY = i Picture3.Print iNext iFor fj1 = 0 To 360 Step 0.01f1 = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Call RR3Call RRP1Picture3.PSet (fj1, vss)Next fj1End SubPrivate Sub Command4_Click() '求点G的加速度Picture4.Scale (-20, 20000)-(380, -10000)Picture4.Line (-20, 0)-(380, 0) 'XPicture4.Line (0, 20000)-(0, -10000) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture4.DrawStyle = 2Picture4.Line (i, 20000)-(i, -10000)Picture4.CurrentX = i - 10: Picture4.CurrentY = 0 Picture4.Print iNext iFor i = -10000 To 20000 Step 1000 'Y轴坐标Picture4.Line (0, i)-(380, i)Picture4.CurrentX = -25: Picture4.CurrentY = i + 5 Picture4.Print iNext iFor fj1 = 0 To 360 Step 0.01f1 = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Call RR3Call RRP1Picture4.PSet (fj1, ass)Next fj1End SubPrivate Sub Form_Load() '赋初值xA = 0yA = 0vxA = 0vyA = 0axA = 0ayA = 0xD = 730yD = -138vxD = 0vyD = 0axD = 0ayD = 0xG = 465yG = -248vxG = 0vyG = 0axG = 0ayG = 0xN = 545yN = 0vxN = 0vyN = 0axN = 0ayN = 0delt1 = 0L1 = 200w1 = 10e1 = 0L2 = 670L3 = 350delt2 = 0LBE = 335L4 = 380LFG = 130deltGH = 56 * paLGH = 100L6 = 486Lj = 0fj = pi / 2wj = 0ej = 0pi = 3.14pa = pi / 180End SubPublic Sub RR1() '杆ABxB = xA + L1 * Cos(f1 + delt1)yB = yA + L1 * Sin(f1 + delt1)vxB = vxA - w1 * L1 * Sin(f1 + delt1)vyB = vyA + w1 * L1 * Cos(f1 + delt1)axB = axA - w1 ^ 2 * L1 * Cos(f1 + delt1) - e1 * L1 * Sin(f1 + delt1) ayB = ayA - w1 ^ 2 * L1 * Sin(f1 + delt1) + e1 * L1 * Cos(f1 + delt1) End SubPublic Sub RRR1() '杆BCDDim xC As DoubleDim yC As DoubleDim vxC As DoubleDim vyC As DoubleDim axC As DoubleDim ayC As DoubleDim LBD As DoubleDim JCBD As DoubleDim val1 As DoubleDim fDB As DoubleDim C2 As DoubleDim C3 As DoubleDim S2 As DoubleDim S3 As DoubleDim G11 As DoubleDim G12 As DoubleDim G13 As DoubleLBD = Sqr((xD - xB) ^ 2 + (yD - yB) ^ 2)If LBD > L2 + L3 And LBD < Abs(L2 - L3) ThenIf MsgBox("RRR杆组杆长不符合要求", vbOKOnly, "提示") = 1 Then EndElseEnd IfElseEnd IfIf LBD < L2 + L3 And LBD > Abs(L2 - L3) Thenval1 = (L2 ^ 2 + LBD ^ 2 - L3 ^ 2) / (2 * L2 * LBD)JCBD = Atn(-val1 / Sqr(-val1 * val1 + 1)) + 2 * Atn(1)ElseEnd IfIf LBD = L2 + L3 ThenJCBD = 0ElseEnd IfIf LBD = Abs(L2 - L3) ThenIf L2 > L3 ThenJCBD = 0ElseEnd IfIf L2 < L3 ThenJCBD = piElseEnd IfElseEnd IfIf xD > xB And yD >= yB Then '第一象限fDB = Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD = xB And yD > yB ThenfDB = pi * 2ElseEnd IfIf xD < xB And yD >= yB Then '第二象限fDB = pi + Atn((yD - yB) / (xD - xB)) ElseEnd IfIf xD < xB And yD < yB Then '第三象限fDB = pi + Atn((yD - yB) / (xD - xB)) ElseEnd IfIf xB = xD And yD < yB ThenfDB = 3 * pi / 2ElseEnd IfIf xD > xB And yD <= yB Then '第四象限fDB = 2 * pi + Atn((yD - yB) / (xD - xB)) ElseEnd Iff2 = fDB + JCBDxC = xB + L2 * Cos(f2)yC = yB + L2 * Sin(f2)If xC > xD And yC >= yD Then '第一象限f3 = Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC = xD And yC > yD Thenf3 = pi / 2ElseEnd IfIf xC < xD And xC >= xD Then '第二象限f3 = pi + Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC < xD And xC < xD Then '第三象限f3 = pi + Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC = xD And xC < xD Thenf2 = 3 * pi / 2ElseEnd IfIf xC > xD And xC <= xD Then '第四象限f2 = 2 * pi + Atn((yC - yD) / (xC - xD))ElseEnd IfC2 = L2 * Cos(f2)S2 = L2 * Sin(f2)C3 = L3 * Cos(f3)S3 = L3 * Sin(f3)G11 = C2 * S3 - C3 * S2w2 = (C3 * (vxD - vxB) + S3 * (vyD - vyB)) / G11w3 = (C2 * (vxD - vxB) + S2 * (vyD - vyB)) / G11vxC = vxB - w2 * L2 * Sin(f2)vyC = vyB + w2 * L2 * Cos(f2)G12 = axD - axB + w2 ^ 2 * C2 - w3 ^ 2 * C3G13 = ayD - ayB + w2 ^ 2 * S2 - w3 ^ 2 * S3e2 = (G12 * C3 + G13 * S3) / G11e3 = (G12 * C2 + G13 * S2) / G11axC = axB - e2 * L2 * Sin(f2) - w2 ^ 2 * L2 * Cos(f2)ayC = ayB - e2 * L2 * Cos(f2) - w2 ^ 2 * L2 * Sin(f2)End SubPublic Sub RR2() '杆BExE = xB + LBE * Cos(f2 + delt2)yE = yB + LBE * Sin(f2 + delt2)vxE = vxB - w2 * LBE * Sin(f2 + delt2)vyE = vyB + w2 * LBE * Cos(f2 + delt2)axE = axB - w2 ^ 2 * LBE * Cos(f2 + delt2) - e2 * LBE * Sin(f2 + delt2) ayE = ayB - w2 ^ 2 * LBE * Sin(f2 + delt2) + e2 * LBE * Cos(f2 + delt2) End SubPublic Sub RRR2() '杆EFGDim xF As DoubleDim yF As DoubleDim vxF As DoubleDim vyF As DoubleDim axF As DoubleDim ayF As DoubleDim LEG As DoubleDim JFEG As DoubleDim val2 As DoubleDim fGE As DoubleDim C4 As DoubleDim C5 As DoubleDim S4 As DoubleDim S5 As DoubleDim G21 As DoubleDim G22 As DoubleDim G23 As DoubleLEG = Sqr((xG - xE) ^ 2 + (yG - yE) ^ 2)If LEG > L4 + LFG And LEG < Abs(L4 - LFG) ThenIf MsgBox("RRR杆组杆长不符合要求", vbOKOnly, "提示") = 1 Then EndElseEnd IfElseEnd IfIf LEG < L4 + LFG And LEG > Abs(L4 - LFG) Thenval2 = (L4 ^ 2 + LEG ^ 2 - LFG ^ 2) / (2 * L4 * LEG)JFEG = Atn(-val2 / Sqr(-val2 * val2 + 1)) + 2 * Atn(1)ElseEnd IfIf LEG = L4 + LFG ThenJFEG = 0ElseEnd IfIf LEG = Abs(L4 - LFG) ThenIf L4 > LFG ThenJFEG = 0ElseEnd IfIf L4 < LFG ThenJFEG = piElseEnd IfElseEnd IfIf xG > xE And yG >= yE Then '第一象限fGE = Atn((yG - yE) / (xG - xE))ElseEnd IfIf xG = xE And yG > yE ThenfGE = pi * 2ElseEnd IfIf xG < xE And yG >= yE Then '第二象限fGE = pi + Atn((yG - yE) / (xG - xE)) ElseEnd IfIf xG < xE And yG < yE Then '第三象限fGE = pi + Atn((yG - yE) / (xG - xE)) ElseEnd IfIf xE = xG And yG < yE ThenfGE = 3 * pi / 2ElseEnd IfIf xG > xE And yG <= yE Then '第四象限fGE = 2 * pi + Atn((yG - yE) / (xG - xE)) ElseEnd Iff4 = fGE - JFEGxF = xE + L4 * Cos(f4)yF = yE + L4 * Sin(f4)If xF > xG And yF >= yG Then '第一象限f5 = Atn((yF - yG) / (xF - xG))ElseEnd IfIf xF = xG And yF > yG Thenf5 = pi / 2ElseEnd IfIf xF < xG And xF >= xG Then '第二象限f5 = pi + Atn((yF - yG) / (xF - xG))ElseEnd IfIf xF < xG And xF < xG Then '第三象限f5 = pi + Atn((yF - yG) / (xF - xG))ElseEnd IfIf xF = xG And xF < xG Thenf4 = 3 * pi / 2ElseEnd IfIf xF > xG And xF <= xG Then '第四象限f4 = 2 * pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfC4 = L4 * Cos(f4)S4 = L4 * Sin(f4)C5 = LFG * Cos(f5)S5 = LFG * Sin(f5)G21 = C4 * S5 - C5 * S4w4 = (C5 * (vxG - vxE) + S5 * (vyG - vyE)) / G21w5 = (C4 * (vxG - vxE) + S4 * (vyG - vyE)) / G21vxF = vxE - w4 * L4 * Sin(f4)vyF = vyE + w4 * L4 * Cos(f4)G22 = axG - axE + w4 ^ 2 * C4 - w5 ^ 2 * C5G23 = ayG - ayE + w4 ^ 2 * S4 - w5 ^ 2 * S5e4 = (G22 * C5 + G23 * S5) / G21e5 = (G22 * C4 + G23 * S4) / G21axF = axE - e4 * L4 * Sin(f4) - w4 ^ 2 * L4 * Cos(f4)ayF = ayE - e4 * L4 * Cos(f4) - w4 ^ 2 * L4 * Sin(f4)End SubPublic Sub RR3() '杆GHxH = xG + LGH * Cos(f5 + deltGH)yH = yG + LGH * Sin(f5 + deltGH)vxH = vxG - w5 * LGH * Sin(f5 + deltGH)vyH = vyG + w5 * LGH * Cos(f5 + deltGH)axH = axG - w5 ^ 2 * LGH * Cos(f5 + deltGH) - e5 * LGH * Sin(f5 + deltGH) ayH = ayG - w5 ^ 2 * LGH * Sin(f5 + deltGH) + e5 * LGH * Cos(f5 + deltGH) End SubPublic Sub RRP1() '杆组H(M)KDim A0 As DoubleDim Q1 As DoubleDim Q2 As DoubleDim Q3 As DoubleDim Q4 As DoubleDim Q5 As DoubleDim val3 As DoubleA0 = Lj + (yN - yH) * Cos(fj) - (xN - xH) * Sin(fj)val3 = A0 / L6fi = Atn(val3 / Sqr(-val3 * val3 + 1)) + fjxM = xH + L6 * Cos(fi)yM = yH + L6 * Sin(fi)ss = (xM - xN) * Cos(fj) + (yM - yN) * Sin(fj)xK = xN + ss * Cos(fj)yK = yN + ss * Sin(fj)Q1 = vxN - vxH - wj * (ss * Sin(fj) + Lj * Cos(fj))Q2 = vyN - vyH + wj * (ss * Cos(fj) - Lj * Sin(fj))Q3 = L6 * Sin(fi) * Sin(fj) + L6 * Cos(fi) * Cos(fj)w6 = (-Q1 * Sin(fj) + Q2 * Cos(fj)) / Q3vss = -(Q1 * L6 * Cos(fi) + Q2 * L6 * Sin(fi)) / Q3vxM = vxH - w6 * L6 * Sin(fi)vyM = vyH + w6 * L6 * Cos(fi)vxK = vxN + vss * Cos(fj) - ss * wj * Sin(fj)vyK = vyN + vss * Sin(fj) + ss * wj * Cos(fj)Q4 = axN - axH + w6 ^ 2 * L6 * Cos(fi) - ej * (ss * Sin(fj) + Lj * Cos(fj)) - wj ^ 2 * (ss * Cos(fj) - Lj * Sin(fj)) - 2 * vss * wj * Sin(fj)Q5 = ayN - ayH + w6 ^ 2 * L6 * Sin(fi) + ej * (ss * Cos(fj) - Lj * Sin(fj)) - wj ^ 2 * (ss * Sin(fj) + Lj * Cos(fj)) + 2 * vss * wj * Cos(fj)e6 = (-Q4 * Sin(fj) + Q5 * Cos(fj)) / Q3ass = (-Q4 * L6 * Cos(fi) - Q5 * L6 * Sin(fi)) / Q3axM = axH - e6 * L6 * Sin(fi) - w6 ^ 2 * L6 * Cos(fi)ayM = ayH + e6 * L6 * Cos(fi) - w6 ^ 2 * L6 * Sin(fi)axK = axN + ass * Cos(fj) - ss * ej * Sin(fj) - ss * wj ^ 2 * Cos(fj) - 2 * vss * wj * Sin(fj)ayK = ayN + ass * Sin(fj) + ss * ej * Cos(fj) - ss * wj ^ 2 * Sin(fj) + 2 * vss * wj * Cos(fj)End Sub(四)计算结果分析用VB编程可得构件6的位移、速度、加速度图像,由图像可得机构运动一个周期内每个时刻的运动参数值,较为直观。
机械原理大作业-连杆机构

设计内容
结论
1. 机构结构分析 1)计算机构自由度,确定机构是否有确定运动。
机构自度 F=1
本机构中,n= 5 , pL= 7
,pH = 0
则有:F=3n-2PL –PH= 3*5-2*7=1
是否有确定
机构确定运动判断: 因 F= 1 ,原动件个数= 1 ,可知: 自由度等于原动件数,机构有确定 的运动。
➢ 求解速度 vB 、角速度 2 : 矢量方程:
大小 ? √ ? 方向 ⊥BD ⊥OA ⊥AB
逆时针方向 ➢ 求解速度 vC 、2 杆质心 S2 的速度 vs2 :
vB =1.57m/s 2 =0.36rad/s, 逆时针方向
vC =1.56m/s vs2 =1.53m/s
-3-
➢ 求解速度 vE 、角速度 4 : 矢量方程:
动态静力学参数:m2=20 kg , JS2 = 1.1 kg m2 ,m5=50 kg
表 2 阻抗力参数表
班级序号 1
2
3
4
5
6
7
8
9
10
Fr /N
500 600 700
800
900
1000 1100 1200 1300 1400
-1-
机械原理模块训练一
二、 训练要求
通过对干草压缩机六杆机构进行结构分析、运动分析和力分析,对该设备的运动性能做出 定量的计算,为新设备的设计与评价提供依据。 机构结构分析:了解机构组成,学会对机构工作原理简图表达,判断机构的结构组成是否可行。 机构运动分析:已知原动件运动参数情况下,学会求解机构输出端和机构中关键点的运动参数。 机构动态静力分析:当已知工作阻力时,需要给机器配置动力,通过平衡力求解可以获得;当 机器安装时需要知道支座的反力,可通过动态静力分析获得。
哈工大机械原理大作业连杆机构9
机械原理大作业大作业一:连杆机构运动分析学生姓名:学号:指导教师:丁刚完成时间:机电工程学院机械设计系制二〇一八年四月连杆机构运动分析1题目(9)图1 设计题目在图1所示的机构中,已知l AB=60mm,l BC=180mm,l DE=200mm,l CD=120mm,l EF=300mm,h=80mm,h1=85mm,h2=225mm,构件1以等角速度ω1=100rad/s 转动。
求在一个运动循环中,滑块5的位移、速度和加速度曲线。
2分析结构1、杆1为RR主动件,绕A以ω1 转动,自由度1.2、4杆和滑块5为RRP II级杆组.,自由度0.3、2,3杆组成II级杆组RRR,自由度0.总共自由度为F=5*3-2*7=1 .由上述的杆组类型,确认出所需运动分析数学模型:同一构件上的点、RRP、RRR。
3.杆组法对平面连杆机构进行运动分析3.1对主动件杆1 RR I级构件的分析主动杆1转角:φ= [0°,360°) δ=0°,则φ’=ω1=100 rad/s角加速度φ’’=0.已知h2=225mm, h=80mm, l AB=60mm 所以A(225mm,80mm)A点速度(0,0),加速度(0,0)B点位置(x A+l AB*cos(φ), Y A+l AB*sin(φ))B点速度(-l AB*sin(φ), l AB*cos(φ)),加速度(-l AB*cos(φ), -l AB*sin(φ))3.2RRRII 级杆组分析(模型参考教材P37-38)图3 如图所示两个构件组成II 级杆组。
已知了B 的位置(x B ,y B )= (x A +l AB *cos(φ), Y A +l AB *sin(φ)),速度(x ’B ,y ’B ) 和加速度(x ’’B ,y ’’B ), 已知运动副D (0,0), 还可知,x ’D =y ’D =0, x ’’D =y ’’D =0. l BC =180 mm, l CD = 120mm所以,x c =x D +l CD *cos(φi)= x B +l BC *cos(φj) y c =x D +l CD *sin(φi)= x B +l BC *sin(φi) 对于φ的求解: A 0=2*l CD (x B -x D ) B 0=2*l BC (y B -y D ) C 0=l CD 2+ l BD 2- l BC 2为了保证机构的装配正常:l BD ≤l CD + l BC AND l BD ≥Abs (l CD - l BC )可求3杆的转角φi=2*arctan((B 0±sqrt (A 02 + B 02- C 02))/(A 02+ C 02)),角速度w3=φi ’和角加速度α3= φi ’’3.3 同一构件上的点(模型参考书P35-36)Φiφjφi已知D(0,0),速度(0,0),加速度(0,0),3杆转角φi 角速度φi’角加速度φi’’,Φi和它的导数在3.2都有体现LDE= 200mm可求出E的坐标,速度,加速度.x E =x c+lCE*cos(φi)y E =x C+lCE*sin(φi)同样地,速度、加速度通过求导即可得出算式,可以编出程序。
哈工大机械原理大作业一连杆-15题
Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:连杆传动设计院系:船舶与海洋工程学院班级:1513102班分析者:刘康哲学号:*********指导教师:***设计时间:2017.06.051.题目:如图所示机构,已知机构各构件的的尺寸为l AB=100mm,l BD=400mm,l AE=400mm,l BC=200mm,曲柄AB的角速度为w1=10rad/s,试求构件2上点D的轨迹,构件5的角位移、角速度和角加速度,并对结果进行分析。
(题中构件尺寸满足l BD-l AB<l AE<l BD+l AB)。
2.机构的结构分析及基本杆组划分机构各构件都在同一平面内运动,可拆分成一个原动件(构件1),一个RRPⅡ级基本杆组(构件2、3)和一个RPR Ⅱ级基本杆组(构件4、5)。
活动构件数n=5,P L,P H,因此,机构的自由度为F=3*n-2* P L- P H =3*5-2*7=1原动件:RRPⅡ级基本杆组:RPR Ⅱ级基本杆组:3.坐标系的建立以A点为坐标原点,AE方向为x轴正方向,建立平面直角坐标系。
4.各基本杆组的运动分析数学模型(1)原动件:位置分析: X B = X A + L AB * cos(wt) Y B = Y A + L AB * sin(wt) 其中,X A = Y A = 0 ,w = 10rad/s , L AB = 100 mm 速度分析:将上式分别对时间求导,可得速度方程,V XB = V XA – w*L AB *sin(wt)V YB = V YA + w*L AB *cos(wt)其中,V XA = V YA = 0 加速度分析:将上式分别对时间求导,可得速度方程,a XA = a XA – α* L AB * sin(wt) – w*w*L AB *cos(wt)a YA = a YA + α* L AB * cos(wt) – w*w*L AB *sin(wt)其中,a XA = a YA = 0 α= dw/dt(2)RRP Ⅱ级基本杆组:位置分析: X C = LAB*cos(wt)+wt Lab Lbc 222sin *Y C = 0 可求得,β= arcsin (Y B / L BC ) 速度分析:将上式分别对时间求导,可得速度方程,V XC =-w* LAB*cos(wt) – (wt Lab Lbc 222sin * )-1/2 * sin(wt)*wV YC = 0加速度分析:将上式分别对时间求导,可得加速度方程, (3)RPR Ⅱ级基本杆组位置分析: X D = X C + L CD * cos βY D = - L CD * sin β可求得, θ = arctan (-YD / (LAE -XD) ) 速度分析:将上式分别对时间求导,可得速度方程,5.计算编程在MATLAB 中编写如下程序:function [ XD,YD,Q,Q1,Q2] = calculate(t) %UNTITLED4 Summary of this function goes here % Detailed explanation goes here Lab=100; Lbc=200; Lcd=200; Lae=400; w=10;XB=Lab*cos(w.*t); YB=Lab*sin(w.*t); P=asin(YB./Lbc); XC=sqrt(Lbc.^2-YB.^2)+XB; XD=Lcd.*cos(P)+XC; YD=-Lcd.*sin(P); Q=atan(YD./(Lae-XD)); Q1=diff(Q); Q2=diff(Q1); end5.计算结果t 时间 XD D 点横坐标YD D 点纵坐标Q构件5角度Q1 构件5角速度 Q2构件5角加速度5000.10050.003008D点运动轨迹:构件5的角位移线图:构件5的角速度图:构件5的角加速度线图:6.计算结果分析原动件1可做整周回转,同时构件5也可做整周运动。
哈工大机械原理大作业连杆
哈工大机械原理大作业连杆Modified by JACK on the afternoon of December 26, 2020Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:连杆机构运动分析院系:机电工程学院班级:设计者:学号:指导教师:设计时间:1.运动分析题目(11)在图所示的六杆机构中,已知:AB l =150mm, AC l =550mm, BD l =80mm, DE l =500mm,曲柄以等角速度1w =10rad/s 沿逆时针方向回转,求构件3的角速度、角加速度和构件5的位移、速度、加速度。
2.机构的结构分析建立以点A 为原点的固定平面直角坐标系A-x, y,如下图:机构结构分析该机构由Ⅰ级杆组RR (原动件1)、Ⅱ级杆组RPR (杆2及滑块3)和Ⅱ级杆组RRP (杆4及滑块5)组成。
3.建立组成机构的各基本杆组的运动分析数学模型原动件1(Ⅰ级杆组RR )由图所示,原动件杆1的转角a=0-360°,角速度1w =10rad/s ,角加速度1a =0,运动副A 的位置坐标A x =A y =0,速度(A ,A),加速度(A ,A ),原动件1的长度AB l =150mm 。
求出运动副B 的位置坐标(B x , B y )、速度(B ,B )和加速度(B ,B )。
杆2、滑块3杆组(RPR Ⅱ级杆组)已出运动副B 的位置(B x , B y )、速度(B ,B )和加速度(B ,B ),已知运动副C 的位置坐标C x =0, C y =550mm,速度,加速度,杆长AC l =550mm 。
求出构件2的转角b,角速度2w 和角加速度2a . 构件二上点D 的运动已知运动副B 的位置(B x , B y )、速度(B ,B )、加速度(B ,B ),已经求出构件2的转角b ,角速度2w 和角加速度2a ,杆BD 的长度BD l =80mm 。
哈工大机械原理大作业一连杆
Harbin Institute of Technology(一)连杆设计说明书课程名称:机械原理设计题目:连杆机构运动分析院系:机电工程学院班级:1308302设计者:吉曾纬指导教师:赵永强唐德威设计时间:2015年6月运动分析题目:如图所示机构,已知机构各构件的尺寸为AB=150mm ,β=97°,BC=400mm ,CD=300mm ,AD=320mm ,BE=100mm ,EF=230mm ,FG=400mm ,构件1的角速度为ω1=10rad/s,试求构件2上点F 的轨迹及构件5上点G 的位移、速度和加速度,并对计算结果进行分析。
一.对机构进行结构分析依题意可以将杆机构看作曲柄滑块机构和曲柄摇杆机构。
对4机构进行结构分析该机构由原动件AB (Ⅰ级组),BCD (RRR Ⅱ级杆组)和FG (RRP Ⅱ级杆组)组成。
二.建立以点A 为原点的固定平面直角坐标系A-x,y,如图所示。
三.各基本杆组的运动分析数学模型(1)原动件AB(Ⅰ级组)已知原动件AB的转角ψ1=0~2π原动件AB的角速度ω1=10rad/s 原动件AB的角加速度α1=0运动副A的位置坐标xA =0 yA=0A点与机架相连,即该点速度和加速度均为0。
运动副A的速度vxA =0 vyA=0运动副A的加速度axA =0 ayA=0原动件AB长度lAB=150mm 可求出运动副B的位置坐标xB =xA+lABcosψ1yB=xA+lABsinψ1运动副B的速度vxB = vxA-ω1lABsinψ1vyB= vyA+ω1lABcosψ1运动副B的加速度a xB = axA-ω12 lABcosψ1-α1lABsinψ1ayB=ayA-ω12 lABsinψ1+α1lABcosψ1(2) BCD (RRR Ⅱ级杆组)由(1)知B 点位置坐标、速度、加速度 运动副D 点位置坐标x D =320mm y D =0 D 点与机架相连,即该点速度和加速度均为0。
哈工大机械原理大作业1

[键入公司名称]机械原理课程设计[键入文档副标题]p[选取日期]设计题目连杆机构运动分析机电工程学院1008103班H100811109学号设计者王鹏[在此处键入文档的摘要。
摘要通常是对文档内容的简短总结。
在此处键入文档的摘要。
摘要通常是对文档内容的简短总结。
]1、运动分析题目(12)如图所示的六杆机构中,各构件的尺寸分别为:l AB=200mm ,l BC=500mm ,l CD=800mm ,x F= 400mm ,x D=350mm ,y D=350mm ,ω=100rad s⁄,求构件5上点F的位移,速度和加速度。
2、建立坐标系建立以点A为原点的固定平面直角系A−x,y3、对机构进行结构分析该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组PRP(滑块4及滑块5)组成。
I级杆组RR,如图2所示;II级杆组RRR,如图2所示;II级杆组PRP,如图3所示。
4、确定已知参数和求解流程图1所示,规定当φ=10° 时,F 点纵坐标为0 (1)如图2所示,已知原动件杆1的转角,φ=0~360° {x B =l AB ×cos φy B =l AB ×sin φ(2)如图3所示,已知B ,D 两点坐标分别为(x B ,y B )(x D ,y D )和 l BC l CD利用方程组{(x −x B )2+(y −y B )2=l BC 2(x −x D )2+(y −y D )2=l CD2 可以求解出C 点坐标(3)如图4所示,已知C 点坐标、x F 、x D 、y D利用几何关系可以求解出E 点坐标同时,当φ=10° 时,可以求出杆EF 长,记为 l EF进而,可以求出F 点坐标,即F 点位移(4)利用导数的定义与其物理意义v n =s n+h −s n−h2ha n =s n+h −2s n +s n−hh 2利用上述公式,选取适当的步长h ,利用F 点位移就可以得出速度与加速度5、用VC 编程#include <stdio.h>#include <math.h>#define pi 3.14159265358979323846//定义全局变量double Lab,Lbc,Lcd,Xf,Xd,Yd;//定义已知位置量double Wab;//定义角速度量//定义被调用函数void Ccorner (double *a,double *b,double c);//声明C点坐标函数求解函数void Pcorner (double *a,double *b,double c,double d,double e);//声明P点坐标函数求解函数double Kcd (double a,double b);//声明CD直线倾斜角求解函数//主函数main (){Lab=0.200;Lbc=0.500;Lcd=0.800;Xf=0.400;Xd=0.350;Yd=0.350;//赋位置量值Wab=100;//赋角速度值//未知几何与位置参量double Xb,Yb;//定义B点坐标double Xc,Yc;//定义C点坐标double Ye;//定义E点纵坐标double Xp,Yp;//定义瞬心p点坐标double Lef;//定义bp,cp,ef,bd杆长double Yf[720];//定义F点纵坐标//未知速度参量double Vf[720];//定义EF杆速度//未知加速度参量double Af[720];//定义加速度//其余参量double o=10*pi/180,k,k1;//主动杆角度变量与CD杆倾斜角double t=1*pi/180/100;//时间参量,用定义法求速度与加速度int i;//循环控制变量//主函数主体//求位移量for (i=0;i<=361;i++){//准备几何量Xb=Lab*cos(o), Yb=Lab*sin(o);Ccorner (&Xc,&Yc,o);//求C点坐标Pcorner (&Xp,&Yp,Xc,Yc,o);//求瞬心P点坐标k=Kcd (Xp,Yp);//求CD杆倾斜角//求解位移量(规定主动杆10度为Yf零点)if (i==0){k1=k;}Lef=tan(k1)*Xd+Yd;//ef杆长Ye=tan(k)*Xd+Yd;Yf[i]=Ye-Lef;o=o+1*pi/180;}//用定义求速度for (i=1;i<=361;i++){Vf[i]=(Yf[i+1]-Yf[i-1])/(2*t);}//用定义求加速度for (i=1;i<=361;i++){Af[i]=(Yf[i+1]-2*Yf[i]+Yf[i-1])/pow(t,2);}//输出语句for (i=1;i<=180;i++){printf ("%d,%lf,%lf,%lf,\t",i+10,Yf[i]*1000,Vf[i],Af[i]);printf ("%d,%lf,%lf,%lf\n",i+190,Yf[i+180]*1000,Vf[i+180],Af[i+180]); }}//C点坐标值函数void Ccorner(double *a,double *b,double c)//&Xc,&Yc,o{double i,j,x,y,z;//中间参数i=(pow(Lcd,2)-pow(Lbc,2)+pow(Lab*sin(c),2)-pow(Yd,2)+pow(Lab*cos(c),2)-pow((Xd+Xf),2))/(2*(Lab*cos(c)-Xd-Xf));j=(Lab*sin(c)-Yd)/(Lab*cos(c)-Xf-Xd);x=pow(j,2)+1;y=2*(Xf+Xd)*j-2*i*j-2*Yd;z=pow(i,2)-2*(Xf+Xd)*i+pow((Xf+Xd),2)+pow(Yd,2)-pow(Lcd,2);*b=(-y+sqrt(pow(y,2)-4*x*z))/(2*x);*a=i-j*(*b);}//求瞬心P点坐标函数void Pcorner(double *a,double *b,double c,double d,double e)//&Xp,&Yp,Xc,Xp,o{double a1,b1,c1,a2,b2,c2,i,j,k;//中间参量a1=tan(e),a2=(d-Yd)/(c-Xd-Xf);b1=b2=-1;c1=0,c2=(c*(d-Yd)/(c-Xd-Xf))-d;i=a1*b2-b1*a2;j=c1*b2-b1*c2;k=a1*c2-c1*a2;*a=j/i;*b=k/i;}//CD杆倾斜角double Kcd(double a,double b)//Xp,Yp{double k1;//中间参量k1=-atan ((b-Yd)/(a-Xd-Xf));return k1;}6、计算结果(程序计算结果附在图像之后)6.1位移、速度、加速度的图像点F的位移线图如图5所示。
哈工大机械原理大作业——连杆机构运动分析报告162014
课程名称: 机械原理
院
系:
能源科学与工程学院
班
级:
完成
者:
学
号:
题
号:
16
任课教师: 丁刚
完成内容: 在完成题目计算要求的同时, 扩展了内容, 程序为该结构的通用程 序,可解决机构在不同条件下的运动情况,文本最末为几种情况的分析
哈尔滨工业大学
16、如图所示机构,已知机构各构件的尺寸为
77
1
120]
[ 117
78
1
123]
[ 119
79
1
127]
[ 120
80
1
129]
[ 121
80
1
131]
[ 121
81
1
132]
[ 123
82
1
132]
[ 124
83
1
132]
[ 125
84
1
132]
[ 125
85
1
131]
[ 127
86
1
130]
[ 128
87
1
128]
[ 129
88
0
126]
这是同一根杆, °,λ,λ
现在来看 , , ,由题目得, , 和 是未知的,但不影响整 体,不然给 和 一个初值 °, ,当然,这是可以随意更改的。
基于以上的基本原理,
syms theta theta1 theta2 lamuda lamuda1 lamuda2 sigma sigma1 sigma2 beta beta1 beta2 l1 l11 l2 l21 t output i
哈工大机械原理大作业_连杆35
Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:连杆机构设计院系:机电学院班级:1308102分析者:学号:指导教师:设计时间:2015年06月哈尔滨工业大学一、连杆机构运动分析题目以及坐标系的建立题目中的连杆机构可以简化为图示机构二、机构的结构分析,组成机构的基本杆组划分该机构由机架、一个原动件AB和两个II级杆组组成。
有题目分析易知B点的位置、速度和加速度是我们知道的由B点我们可以推导出c点的位移速度加速度从而得到D点的轨迹最终我们可以求得E点的各个参数。
五、计算编程利用vb软件进行编程,程序如下:Public q As SingleOption ExplicitPrivate Sub Command1_Click()Dim yd, xd, yc, xb, yb, a, b, t, q, i As Singleq = 0a1.ScaleWidth = 300a1.ScaleHeight = -300a1.ScaleLeft = -150a1.ScaleTop = 250a1.Line (-300, 0)-(300, 0)a1.Line (0, -300)-(0, 300)For i = -300 To 300If i Mod 50 = 0 Thena1.Line (-5, i)-(5, i)a1.Line (i, -5)-(i, 5)a1.CurrentX = 0a1.CurrentY = ia1.Print ia1.CurrentX = ia1.CurrentY = 0a1.Print iEnd IfNextFor t = 0 To 200q = q + t / 1000xb = 100 * Sin(q)yb = -100 * Cos(q)xd = 3 / 2 * xbyd = yb + Sqr(40000 - xb * xb) / 2 a1.Line (a, b)-(xd, yd)a = xdb = ydNextEnd SubPrivate Sub Command2_Click()Dim yd, xd, yc, xb, yb, a, b, t, q, i, ve, vc, ye, ye0, yc0, ve0, vc0, ae, ac, ae0, ac0, x1 As Singlea1.ScaleWidth = 10a1.ScaleHeight = -100a1.ScaleLeft = 150a1.ScaleTop = 50ve0 = 0vc0 = 0ye = 200x1 = 151For i = 1 To 15x1 = 3.14159 / 6 + x1a1.Line (x1, 1)-(x1, -1)a1.CurrentX = x1 - 3.14159 / 12a1.CurrentY = -2a1.Print i * 30NextFor t = 0 To 3000q = q + t / 10000xb = 100 * Sin(q)yb = -100 * Cos(q)xd = (3 / 2) * xbyd = yb + Sqr(40000 - xb * xb) / 2ye = yd + Sqr(40000 - xd * xd)yc = yb - Sqr(40000 - xb * xb)ve = (ye - ye0)vc = (yc - yc0)ae = ve - ve0ac = ae - ae0a1.Line (151, -100)-(151, 100)a1.Line (t - 50, 0)-(t, 0)If t Mod 5 = 0 Thena1.Line (150.9, t)-(151.1, t)a1.CurrentX = 151a1.CurrentY = ta1.Print t * 55a1.CurrentX = 151a1.CurrentY = -ta1.Print -t * 55End Ifa1.CurrentX = 151a1.CurrentY = 0a1.Line (q - 0.2, vc0)-(q, vc)a1.Line (q - 0.2, ve0)-(q, ve)yc0 = ycye0 = yeve0 = vevc0 = vcae0 = aeac0 = acNextEnd SubPrivate Sub Command4_Click()Dim yd, xd, yc, xb, yb, a, b, t, q, i, ve, vc, ye, ye0, yc0, ve0, vc0, ae, ac, ae0, ac0, x1 As Singlea1.ScaleWidth = 10a1.ScaleHeight = -30a1.ScaleLeft = 150a1.ScaleTop = 15ve0 = 0vc0 = 0ye = 200x1 = 151For i = 1 To 15x1 = 3.14159 / 6 + x1a1.Line (x1, 0.5)-(x1, -0.5)a1.CurrentX = x1 - 3.14159 / 12a1.CurrentY = -2a1.Print i * 30Nexta1.Line (151, -100)-(151, 100)a1.Line (0, 0)-(300, 0)For t = 0 To 3000q = q + t / 10000xb = 100 * Sin(q)yb = -100 * Cos(q)xd = (3 / 2) * xbyd = yb + Sqr(40000 - xb * xb) / 2 ye = yd + Sqr(40000 - xd * xd)yc = yb - Sqr(40000 - xb * xb)ve = (ye - ye0)vc = (yc - yc0)ae = ve - ve0ac = ae - ae0a1.Line (q - 0.2, ae0)-(q, ae)a1.Line (q - 0.2, ac0)-(q, ac)If t Mod 2 = 0 Thena1.Line (150.9, t)-(151.1, t)a1.CurrentX = 151a1.CurrentY = ta1.Print t * 300a1.CurrentX = 151a1.CurrentY = -ta1.Print -t * 300End Ifyc0 = ycye0 = yeve0 = vevc0 = vcae0 = aeac0 = acNextEnd SubPrivate Sub Command5_Click()Dim yd, xd, yc, xb, yb, a, b, t, q, i, ve, vc, ye, ye0, yc0, ve0, vc0, ae, ac, ae0, ac0, x1 As Singlea1.ScaleWidth = 8.5a1.ScaleHeight = -500a1.ScaleLeft = 25a1.ScaleTop = 300ye = 200x1 = 26For t = 0 To 3000q = q + t / 10000xb = 100 * Sin(q)yb = -100 * Cos(q)xd = (3 / 2) * xbyd = yb + Sqr(40000 - xb * xb) / 2ye = yd + Sqr(40000 - xd * xd)yc = yb - Sqr(40000 - xb * xb)a1.Line (q - 1 / 10, yc0 + 300)-(q, yc + 300) a1.Line (q - 1 / 10, ye0 - 150)-(q, ye - 150) yc0 = ycye0 = yeIf t Mod 27 = 0 Thena1.Line (25.8, t)-(26.2, t)a1.CurrentX = 26a1.CurrentY = ta1.Print 16500 * (t / 270 - 1)End IfNexta1.Line (0, 270)-(50, 270)a1.Line (26, 2270)-(26, -270)For i = 1 To 15x1 = 3.14159 / 6 + x1a1.Line (x1, 275)-(x1, 265)a1.CurrentX = x1 - 3.14159 / 12a1.CurrentY = 270a1.Print i * 30NextEnd SubPrivate Sub Command3_Click()a1.ClsTimer1.Enabled = FalseEnd SubPrivate Sub Command6_Click()Timer1.Enabled = TrueEnd SubPrivate Sub Timer1_Timer()Dim yd, xd, yc, xb, yb, a, b, i, ve, vc, ye, ye0, yc0, ve0, vc0, ae, ac, ae0, ac0, x1 As Singlea1.Clsa1.ScaleWidth = 500a1.ScaleHeight = -700a1.ScaleLeft = -250a1.ScaleTop = 350a1.Line (-350, 0)-(350, 0)a1.Line (0, -350)-(0, 350)For i = -7 To 7a1.Line (-2, i * 50)-(2, i * 50)a1.CurrentX = 0a1.CurrentY = i * 50a1.Print i * 50a1.Line (i * 50, -2)-(i * 50, 2)a1.CurrentY = 0a1.CurrentX = i * 50a1.Print i * 50Nextye = 200x1 = 26q = q + 1 / 100xb = 100 * Sin(q)yb = -100 * Cos(q)xd = (3 / 2) * xbyd = yb + Sqr(40000 - xb * xb) / 2ye = yd + Sqr(40000 - xd * xd)yc = yb - Sqr(40000 - xb * xb)yc0 = ycye0 = yea1.Line (0, 0)-(xb, yb)a1.Line (0, yc)-(xd, yd)a1.Line (10, yc + 10)-(-10, yc + 10) a1.Line (10, yc - 10)-(-10, yc - 10) a1.Line (-10, yc + 10)-(-10, yc - 10) a1.Line (10, yc + 10)-(10, yc - 10)a1.Line (0, ye)-(xd, yd)a1.Line (10, ye + 10)-(-10, ye + 10) a1.Line (10, ye - 10)-(-10, ye - 10) a1.Line (-10, ye + 10)-(-10, ye - 10) a1.Line (10, ye + 10)-(10, ye - 10) End Sub得到如下结果动画D点的行程曲线速度曲线位移曲线加速度曲线六、结果分析我们从可以看出计算出的曲线与标准答案一致我们可以看出我们的结果是正确的。
哈工大机械原理大作业-连杆
Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:连杆运动分析院系:机电工程学院班级:设计者:学号:指导教师:明设计时间: 2013年6月25日1、运动分析题目在图1-10中所示的干草压缩机中,已知LAB=150mm,LBC=600mm,LCE=120mm,LCD=500mm,LEF=600mm,XD=400mm,YD=500mm,YF=600mm,曲柄1作等速转动,其转速n1=50r/min。
求在一个运动循环中活塞5的位移、速度和加速度的变化曲线。
图1-102、机构的结构分析(1)基本杆组的划分①AB即杆件1为原动件②DECB即杆件2、3为RRR型II级杆组,其中CE为同一构件上点。
③ EF 和滑块即4、5为RRP 型II 级杆组(2)、建立以点A 为原点的固定平面直角系3、确定已知参数和求解流程(1)原动件1(I 级杆组RR )如图所示,已知原动件1的转角πϕ2~01=原动件杆1的角速度s rad /236.51=ω原动件1的角加速度01=α运动副A 的位置坐标0,0==A A y x运动副A 的速度0,0==yA xA v v运动副A 的加速度0,0==yA xA a a原动件杆I 的长度mm l 1501=可求出B 的位置B 的速度B 的加速度(2)构件2、3(II 级杆组RRR )D 的位置500400==D D y xD 的速度 00==yD xD v vD 的加速度00==yD xD a a杆长mm l l CD j 500==,mm l l BC i 600==由关系j j D i i B C l x l x x ϕϕcos cos +=+=j j D i i B C l y l y y ϕϕsin sin +=+=其中)(20sin cos B D i i i x x l A C B A -==-+ ϕϕ)(2B D i y y l B -=222j BD i l l l C -+=222)()(B D B D BD y y X x l -+-=可解得C A C B A B i +-++=222arctan 2ϕ DC D C j x x y y --=arctan ϕ 由上面两个式子可以得到两杆的角速度 1)()(G y y s x x c w B D j B D j i i -+-==•ϕ132G s G c G ij i i +==ϕα其中i j j i s c s c G -=1,i i i l c ϕcos =,i i i l s ϕsin =,j j j l c ϕcos =,j j j l s ϕsin =可得E 的位置iB E iB E y y x x ϕϕsin 480cos 480+=+=E 的速度 i i yB E yE i i xB E xE v yv v x v ωϕωϕcos 480sin 480+==-==E 的加速度i i i i xB E xE a xa αϕωϕsin 480cos 4802--== i i i i yB E yE a ya ϕαϕωcos 480sin 4802+-== (3)、构件4、5杆组(II 级杆组RRP )在建立的坐标系中取一参考点K 600,0==K K y x则速度0,0==yK xK v v加速度0,0==yK xK a a杆长mm l EF 600=,设F 位移为s由s x l x x K i EF E F +=+='cos ϕ K i EF E F y l y y =+='sin ϕ由上面两个式子可以得到 600600arcsin arcsin'E EF E k i y l y y -=-=ϕ所以:F 点位移 )600600arcsin(cos 600E E F y x x s -+== 速度F F xv = 加速度F F xa =四、编程计算并输出结果(VB 编程)主程序:Private Sub Command1_Click()Dim s5(3600) As DoubleDim v5(3600) As DoubleDim a5(3600) As DoubleDim pi As DoubleDim pa As Doublepi = 3.1415926pa = pi / 180Dim i As LongDim f1(3600) As Double Dim RR1 As RRDim RR2 As RRDim RRR1 As RRRDim RRP1 As RRPSet RR1 = New RRSet RR2 = New RRSet RRR1 = New RRRSet RRP1 = New RRPFor i = 0 To 3600 Step 1 f1(i) = i * pa / 10RR1.delt = 0RR1.f = f1(i)RR1.w = 5.24RR1.e = 0RR1.L = 150RR1.xA = 0RR1.yA = 0RR1.vxA = 0RR1.vyA = 0RR1.axA = 0RR1.ayA = 0RR1.calRRR1.Li = 600RRR1.Lj = 500RRR1.xB = RR1.xBRRR1.yB = RR1.yBRRR1.vxB = RR1.vxBRRR1.vyB = RR1.vyBRRR1.axB = RR1.axBRRR1.ayB = RR1.ayBRRR1.xD = 400RRR1.yD = 500RRR1.vxD = 0RRR1.vyD = 0RRR1.axD = 0RRR1.ayD = 0RRR1.M = 1RRR1.calRRRRR2.delt = 0RR2.f = RRR1.fi RR2.w = RRR1.wi RR2.e = RRR1.ei RR2.L = 480RR2.xA = RR1.xB RR2.yA = RR1.yB RR2.vxA = RR1.vxB RR2.vyA = RR1.vyB RR2.axA = RR1.axB RR2.ayA = RR1.ayB RR2.calRRP1.Li = 600RRP1.Lj = 0RRP1.fj = piRRP1.wj = 0RRP1.ej = 0RRP1.xB = RR2.xB RRP1.yB = RR2.yB RRP1.vxB = RR2.vxB RRP1.vyB = RR2.vyB RRP1.axB = RR2.axB RRP1.ayB = RR2.ayB RRP1.xK = 0RRP1.yK = 600RRP1.vxK = 0RRP1.vyK = 0RRP1.axK = 0RRP1.ayK = 0RRP1.M = 1RRP1.cals5(i) = RRP1.ssv5(i) = RRP1.vssa5(i) = RRP1.assNext iPicture1.Scale (-30, 700)-(360, 580)Picture1.Line (0, 0)-(360, 0) 'XPicture1.Line (0, 580)-(0, 700) 'YFor i = 0 To 360 Step 10 'X轴坐标Picture1.DrawStyle = 2Picture1.Line (i, 700)-(i, 580)Picture1.CurrentX = i - 10: Picture1.CurrentY = 0 Picture1.Print iNext iFor i = 580 To 700 Step 10 'Y轴坐标Picture1.DrawStyle = 2Picture1.Line (0, i)-(360, i)Picture1.CurrentX = -10: Picture1.CurrentY = iPicture1.Print iNext iFor i = 0 To 3600 Step 1Picture1.PSet (i / 10, s5(i))Next iEnd SubRR:Public L As DoublePublic f As DoublePublic delt As DoublePublic w As DoublePublic e As DoublePublic xA As DoublePublic yA As DoublePublic vxA As DoublePublic vyA As DoublePublic axA As DoublePublic ayA As DoublePublic xB As DoublePublic yB As DoublePublic vxB As DoublePublic vyB As DoublePublic axB As DoublePublic ayB As DoublePublic Sub cal()xB = xA + L * Cos(f + delt)yB = yA + L * Sin(f + delt)vxB = vxA - w * L * Sin(f + delt)vyB = vyA + w * L * Cos(f + delt)axB = axA - w ^ 2 * L * Cos(f + delt) - e * L * Sin(f + delt) ayB = ayA - w ^ 2 * L * Sin(f + delt) + e * L * Cos(f + delt) End SubRRR:Public Li As DoublePublic Lj As DoublePublic fi As DoublePublic fj As DoublePublic wi As DoublePublic wj As DoublePublic ei As DoublePublic ej As DoublePublic xB As DoublePublic yB As DoublePublic vxB As DoublePublic vyB As DoublePublic axB As DoublePublic ayB As DoublePublic xC As DoublePublic yC As DoublePublic vxC As DoublePublic vyC As DoublePublic axC As DoublePublic ayC As DoublePublic xD As DoublePublic yD As DoublePublic vxD As DoublePublic vyD As DoublePublic axD As DoublePublic ayD As DoublePublic M As DoublePublic Sub calRRR()Dim fDB As DoubleDim Ci As DoubleDim Cj As DoubleDim Si As DoubleDim Sj As DoubleDim G1 As DoubleDim G2 As DoubleDim G3 As DoubleDim LBD As DoubleDim JCBD As DoubleDim val As Doublepi = 3.1415926LBD = Sqr((xB - xD) ^ 2 + (yD - yB) ^ 2)If LBD < Li + Lj And LBD > Abs(Li - Lj) Thenval = (Li ^ 2 + LBD ^ 2 - Lj ^ 2) / (2 * Li * LBD) JCBD = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1) End IfRRP:Public Li As DoublePublic Lj As DoublePublic fi As DoublePublic fj As DoublePublic wi As DoublePublic wj As DoublePublic ei As DoublePublic ej As DoublePublic xB As DoublePublic yB As DoublePublic vxB As DoublePublic vyB As DoublePublic axB As DoublePublic ayB As DoublePublic xK As DoublePublic yK As DoublePublic vxK As DoublePublic vyK As DoublePublic axK As DoublePublic ayK As DoublePublic xC As DoublePublic yC As DoublePublic vxC As DoublePublic vyC As DoublePublic axC As DoublePublic ayC As DoublePublic xD As DoublePublic yD As DoublePublic vxD As DoublePublic vyD As DoublePublic axD As DoublePublic ayD As DoublePublic M As SinglePublic ss As DoublePublic vss As DoublePublic ass As DoublePublic Sub cal()Dim A0 As DoubleDim Q1 As DoubleDim Q2 As DoubleDim Q3 As DoubleDim Q4 As DoubleDim Q5 As DoubleDim val As DoubleDim pi As Doublepi = 3.14159216A0 = Lj + ((yK - yB) * Cos(fj) - (xK - xB) * Sin(fj)) val = A0 / Lifi = M * Atn(val / Sqr(-val * val + 1)) + fjxC = xB + Li * Cos(fi)yC = yB + Li * Sin(fi)ss = (xC - xK) * Cos(fj) + (yC - yK) * Sin(fj)xD = xK + ss * Cos(fj)yD = yK + ss * Sin(fj)Q1 = vxK - vxB - wj * (ss * Sin(fj) + Lj * Cos(fj))Q2 = vyK - vyB + wj * (ss * Cos(fj) - Lj * Sin(fj))Q3 = Li * Sin(fi) * Sin(fj) + Li * Cos(fi) * Cos(fj) wi = (-Q1 * Sin(fj) + Q2 * Cos(fj)) / Q3vss = -(Q1 * Li * Cos(fi) + Q2 * Li * Sin(fi)) / Q3vxC = vxB - wi * Li * Sin(fi)vyC = vyB + wi * Li * Cos(fi)vxD = vxK + vss * Cos(fj) - ss * wj * Sin(fj)vyD = vyK + vss * Sin(fj) + ss * wj * Cos(fj)Q4 = axK - axB + wi ^ 2 * Li * Cos(fi) - ej * (ss * Sin(fj) + Lj * Cos(fj)) - wj ^ 2 * (ss * Cos(fj) - Lj * Sin(fj)) - 2 * vss * wj * Sin(fj)Q5 = ayK - ayB + wi ^ 2 * Li * Sin(fi) + ej * (ss * Cos(fj) - Lj * Sin(fj)) - wj ^ 2 * (ss * Sin(fj) + Lj * Cos(fj)) + 2 * vss * wj * Cos(fj)ei = (-Q4 * Sin(fj) + Q5 * Cos(fj)) / Q3ass = (-Q4 * Li * Cos(fi) - Q5 * Li * Sin(fi)) / Q3axC = axB - ei * Li * Sin(fi) - wi ^ 2 * Li * Cos(fi)ayC = ayB + ei * Li * Cos(fi) - wi ^ 2 * Li * Sin(fi)axD = axK + ass * Cos(fj) - ss * ej * Sin(fj) - ss * wj ^ 2 * Cos(fj) - 2 * vss * wj * Sin(fj) ayD = ayK + ass * Sin(fj) + ss * ej * Cos(fj) - ss * wj ^ 2 * Sin(fj) + 2 * vss * wj * Cos(fj) End Sub五、计算结果数据如图:位移曲线:速度曲线:加速度曲线:六、计算结果分析主动件转角为0时,滑块的位移为628mm,随着转角的匀速增加,滑块位移先上升,速度为负快速下降,加速度为负且开始值较小并逐渐下降,到达最低点-2200左右,此时速度为0, 然后位移开始继续下降,速度继续下降,然后到达最小值-100左右,此时加速度为0,又开始上升(向左运动),速度正向增大,在后面一段时期速度继续增大,加速度也正向增大,然后速度下降,加速度下降.滑块分别在4.2s,11.4s速度达到正向最大,1.7s,7.7s速度达到负向最大,0.8s,2.7s,5.8s,9.6s加速度达到极值,滑块就是这样周期性的左右运动。
哈工大机械原理大作业(连杆机构)
建立坐标系:以C为原点,水平方向为X轴,CA所在直线为Y轴建立直角坐标系(如图4)。
取曲柄1水平且位于A点右侧为初始时刻,设曲柄1角速度为w,由题意知w= =8.5π rad/s………………(1)
设曲柄1转角为θ,则B点坐标:
xB=ιABcosθ=ιABcoswt
yB=H1+ιABsinθ=H1+ιABsinwt………………(2)
form=1:length(t)-1
ddxF(m)=(dxF(m+1)-dxF(m))/0.0001;
end
ddxF(length(t))=ddxF(length(t)-1);
figure
plot(t,ddxF)
title('¼ÓËÙ¶ÈͼÏñ');
xlabel('t /s'),ylabel('v /(m/s^2)');
输出图像:
xE(m)=yE(m)/k(m);
xF(m)=xE(m)-(-H^2+lEF^2-yE(m)^2+2*yE(m)*H)^(1/2)+0.1142;
end
form=1:length(t)-1
dxF(m)=(xF(m+1)-xF(m))/0.0001;
end
dxF(length(t))=dxF(length(t)-1);
∵ιEF+ιCE>H且ιCE<H
∴E点始终在F点的右下方
∴xF<xE,所以x2舍去,只取xF=x1……………(8)
∴点F坐标为(xF,H)
当t=0时,可得F点初始位置坐标,不妨设为(xo,H)。
则F点位移(通过计算,t=0时,得xo=-0.1142)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业一课程名称:机械原理设计题目:连杆机构运动分析院系:机电学院班级:1208105分析者:马亮学号:1120810533指导教师:丁刚设计时间:2014.05.21哈尔滨工业大学33题如图1-33所示机构,已知机构各构件的尺寸为AB=200mm, BC=4AB,CD=2.24AB,AD=3.25AB,BE=3.34AB,EC=5.7AB,EH=3.34AB,EF=1.63AB,GF=KH=2.67 AB,GF=KH=2.67AB,AK=4.13AB,AG=5AB,GK=2.5AB,KD=1.44AB,构件1的角速度为ω=10rad/s。
试求构件2上点E点的轨迹及构件6、构件7的角位移、角速度和角加速度,并对计算结果进行分析。
一、建立直角坐标系以A点为直角坐标系的原点建立直角坐标系X-Y,二、机构结构分析该机构由原动件AB、机架及三个II级杆组RRR组成。
三个II级杆组如图所示。
++三、各基本杆组运动分析 1.原动件AB如图所示,已知原动件杆1的转角0~2ϕπ=,角速度s rad /101==ωϕ,角加速度0ϕ=,运动副A 的位置坐标为0,0==A A y x ,速度为0,0==A A y x ,加速度为0,0==A A yx ,原动件杆1的长度200AB l mm =。
位置分析: cos sin B A AB i B A AB ix x l y x l ϕϕ=+=+速度分析:cos sin B i AB i B i AB ix l y l ϕϕϕϕ=-=加速度分析:22cos sin sin cos B i AB i i AB i B i AB i i AB ix l l y l l ϕϕϕϕϕϕϕϕ=--=-+将已知参数带入可求出B B B B B B x y x y x y 、、、、、、2.II 级杆组(RRR )—BCDC 点:已知B点参数(B B B B B B x y x y x y 、、、、、、),D点的参数(D D D D D D x y x y x y 、、、、、、),杆2的长度i l , 杆3的长度j l ,可求得杆2的运动参数(222,,ϕωα).位置分析:i i cos =cos sin =y sin C B i D j j C B i D j j x x l x l y y l l ϕϕϕϕ=++=++ (1)(2)连立(1)(2)求得:i 00ϕ=其中: )(2B D 0x x l A i -= )(2B D 0y y l B i -=2B D 2B D 2220)()(,y y x x l l l l C BD j BD i -+-=-+=而:j arctanC DC Dy y x x ϕ-=-求得分i ϕ后,带入(1)、(2),便可求得 j ϕ ,C x ,C y . 速度分析: 11[()()]/[()()]/i j D B j D B j i D B j D B w C x x S y y G w C x x S y y G =-+-=-+-其中:1i i cos ,sin cos ,sin i j j ii i i i j j j j j j G C S C S C l S l C l S l ϕϕϕϕ=-====内运动副C 点的速度Cx v ,Cy v 为: i i i isin sin cos cos Cx C B i i D j j Cy C B i i yD D j v x x l x l v y y l v y l ϕϕϕϕϕϕϕ==-=-==+=+加速度分析: 231231()/()/i i j j j j i i G C G S G G C G S G αϕαϕ==+==+其中:222223D B D B i i j j i ijjG x x C C G y y S S ϕϕϕϕ=-+-=-+-内运动副的加速度C x a ,C y a 为:2C i i 2C C i isin cos cos sin x C i i i i y i i i ia x l l a y l l ϕϕϕϕϕϕϕϕ=--=+-3.E 点:通过杆组RR (AB )的分析,可易知B 点的运动参数(B B B B B B x y x y x y 、、、、、、),通过对II 级杆组RRR (杆2、3)的分析可知杆2的运动参数(222,,ϕωα)即可得杆BE 的运动参数(e e e ,,ϕωα),引用RR 杆组模块,可求的E 点的运动参数(E E E E E E x y x y x y 、、、、、、)。
位置分析:22cos sin E B BE E B BE x x l y x l ϕϕ=+=+速度分析:22cos sin E B i BE E B i BE x x l y y l ϕϕϕϕ=-=+加速度分析:2222222222cos sin sin cos E B BE BE E B BE BE x x l l y y l l ϕϕϕϕϕϕϕϕ=--=-+将已知参数带入可求出E E E E E E x y x y x y 、、、、、 .4.II 级杆组(RRR )—EFGF 点:已知E点参数(E E E E E E x y x y x y 、、、、、),G点的参数(G G G G G G x y x y x y 、、、、、),杆5的长度i l , 杆7的长度j l ,可求得杆7的运动参数(777,,ϕωα).位置分析:i i cos =cos sin =y sin F E i G j j F E i G j j x x l x l y y l l ϕϕϕϕ=++=++(3)(4)连立(3)(4)求得:i 11ϕ= 其中:1G E 1G E 22212()2(),i i i EG j EG A l x x B l y y C l l l l =-=-=+-=而:j arctanF GF Gy y x x ϕ-=-求得分i ϕ后,带入(3)、(4),便可求得 j ϕ . 角速度分析:1[()()]/j i G E i G E C x x S y y G ω=-+-其中:1i i cos ,sin cos ,sin i j j ii i i i j j j j j j G C S C S C l S l C l S l ϕϕϕϕ=-====角加速度分析:231()/j j i i G C G S G αϕ==+ 其中:222223G E G E i i j j i ijjG x x C C G y y S S ϕϕϕϕ=-+-=-+-5.II 级杆组(RRR )—EHKH 点:已知E点参数(E E E E E E x y x y x y 、、、、、),K点的参数(K K K K K K x y x y x y 、、、、、),杆4的长度i l , 杆6的长度j l ,可求得杆6运动参数(666,,ϕωα).位置分析:i i cos =cos sin =y sin H E i K j j H E i K j jx x l x l y y l l ϕϕϕϕ=++=++连立(3)(4)求得:i 22ϕ=其中:2G E 2G E 22222()2(),i i i EK j EK A l x x B l y y C l l l l =-=-=+-=而:j arctanH KH Ky y x x ϕ-=-求得分i ϕ后,带入(5)、(5),便可求得 j ϕ . 角速度分析:1[()()]/j i G E i G E C x x S y y G ω=-+- 其中:1i i cos ,sin cos ,sin i j j ii i i i j j j j j j G C S C S C l S l C l S l ϕϕϕϕ=-====角加速度分析:231()/j j i i G C G S G αϕ==+ 其中:222223K E K E i i j j i ijjG x x C C G y y S S ϕϕϕϕ=-+-=-+-四、程序f1=[0:pi/720:2*pi];%开始% w1=10;xA=0;yA=0;vxA=0;vyA=0;axA=0;ayA=0; lab=200;xB=xA+cos(f1)*lab;%运动副B 位置% yB=yA+sin(f1)*lab;vxB=vxA-w1*lab*sin(f1);%运动副B 速度% vyB=vyA+w1*lab*cos(f1);axB=axA-w1^2*lab*cos(f1)-w1*lab*sin(f1); %运动副B 加速度% ayB=ayA-w1^2*lab*sin(f1)+w1*lab*cos(f1); lbc=800; %杆BC 长% lcd=448; %杆CD 长%xD=148; %运动副D 位置、速度、加速度% yD=-633;vxD=0;vyD=0;axD=0;ayD=0;lbd=realsqrt((xD-xB).^2+(yD-yB).^2); %BD 间距离% A0=2*lbc*(xD-xB); B0=2*lbc*(yD-yB); C0=lbc.^2+lbd.^2-lcd.^2;fbc=2*atan((B0+1*realsqrt(A0.^2+B0.^2-C0.^2))./(A0+C0));%BC 杆转角% xC=xB+lbc*cos(fbc); %运动副C 位置% yC=yB+lbc*sin(fbc);fcd=atan((yC-yD)./(xC-xD));%CD 杆转角% C2=lbc*cos(fbc); S2=lbc*sin(fbc); C3=lcd*cos(fcd); S3=lcd*sin(fcd); G1=C2.*S3-C3.*S2;wbc=(C3.*(vxD-vxB)+S3.*(vyD-vyB))./G1; %杆BC 角速度% wcd=(C2.*(vxD-vxB)+S2.*(vyD-vyB))./G1; %杆CD 角速度% vxC=vxB-lbc*wbc.*sin(fbc); %运动副C 速度% vyC=vxB+lbc*wbc.*cos(fbc);G2=axD-axB+wbc.^2.*C2-wcd.^2.*C3;G3=ayD-ayB+wbc.^2.*S2-wcd.^2.*S3;ebc=(G2.*C3+G3.*S3)./G1; %杆BC角加速度%ecd=(G2.*C2+G3.*S2)./G1; %杆CD角加速度%axC=axB-lbc*ebc.*sin(fbc)-lbc*wbc.^2.*cos(fbc); %运动副C加速度%ayC=ayB+lbc*ebc.*cos(fbc)-lbc*wbc.^2.*sin(fbc);lbe=668;lec=1140;febc=acos((lbc^2.+lbe^2.-lec^2.)/(2.*lbc*lbe));fbe=fbc+febc;wbe=wbc;ebe=ebc;xE=xB+lbe.*cos(fbe);%运动副E位置%yE=yB+lbe.*sin(fbe);subplot(3,3,1);plot(xE,yE);%输出E点的位移%title('E点位移图 ');xlabel('xE(mm)');ylabel('yE(mm)');vxE=vxB-wbe.*lbe.*cos(fbe); %运动副E速度%vyE=vyB-wbe.*lbe.*sin(fbe);axE=axB-wbe.^2*lbe.*cos(fbe)-ebe.*lbe.*sin(fbe); %运动副E加速度%ayE=ayB-wbe.^2*lbe.*sin(fbe)+ebe.*lbe.*cos(fbe);lef=326; %杆EF长%lfg=534; %杆FG长%xG=-823; %运动副G位置、速度、加速度% yG=-568;vxG=0;vyG=0;axG=0;ayG=0;leg=realsqrt((xG-xE).^2+(yG-yE).^2); %EG间距离%A1=2*lef*(xG-xE);B1=2*lef*(yG-yE);C1=lef.^2+leg.^2-lfg.^2;fef=2*atan((B1+1*realsqrt(C1.^2-A1.^2+B1.^2))./(A1+C1));%EF杆转角% xF=xE+lef.*cos(fef); %运动副F位置%yF=yE+lef.*sin(fef);ffg=atan((yF-yG)./(xF-xG));%FG杆转角%subplot(3,3,2);plot(f1,ffg);%输出lfg点的角位移%title('F点角位移图 ');xlabel('f1(rad)');ylabel('ffg(rad)');C22=lef*cos(fef);S22=lef*sin(fef);C33=lfg*cos(ffg);S33=lfg*sin(ffg);G11=C22.*S33-C33.*S22;wef=(C33.*(vxG-vxE)+S33.*(vyG-vyE))./G11; %杆EF角速度%wfg=(C22.*(vyG-vxE)+S22.*(vyG-vyE))./G11; %杆FG角速度%subplot(3,3,3);plot(f1,wfg);% 输出lfg的角速度图%title('lfg的角速度图');xlabel('θ(rad)');ylabel('wfg(rad/s)');vxF=vxE-lef*wef.*sin(fef); %运动副F速度%vyF=vxE+lef*wef.*cos(fef);G22=axG-axE+wef.^2.*C22-wfg.^2.*C33;G33=ayG-ayE+wef.^2.*S22-wfg.^2.*S33;eef=(G22.*C33+G33.*S33)./G1; %杆EF角加速度%efg=(G22.*C22+G33.*S22)./G1; %杆FG角加速度%subplot(3,3,4);plot(f1,efg);%输出F点的加速度图%title('lfg点的角加速度图 ');xlabel('θ(rad)');ylabel(' efg(rad/s2)');leh=668; %杆EH长%lhk=534; %杆HK长%xK=-823; %运动副K位置、速度、加速度% yK=-68;vxK=0;vyK=0;axK=0;ayK=0;lek=realsqrt((xK-xE).^2+(yK-yE).^2); %EK间距离%A2=2*leh*(xK-xE);B2=2*leh*(yK-yE);C2=leh.^2+lek.^2-lhk.^2;feh=2*atan((B2+1*realsqrt(C2.^2-A2.^2+B2.^2))./(A2+C2));%EH杆转角% xH=xE+leh*cos(feh); %运动副H位置%yH=yE+leh*sin(feh);fhk=atan((yH-yK)./(xH-xK));%HK杆转角%subplot(3,3,5);plot(f1,fhk);%输出H点的角位移%title('H点角位移图 ');xlabel('f1(rad)');ylabel('fhk(rad)');C222=leh*cos(feh);S222=leh*sin(feh);C333=lhk*cos(fhk);S333=lhk*sin(fhk);G111=C222.*S333-C333.*S222;weh=(C333.*(vxK-vxE)+S333.*(vyK-vyE))./G111; %杆EH角速度%whk=(C222.*(vxK-vxE)+S222.*(vyK-vyE))./G111; %杆FG角速度% subplot(3,3,6);plot(f1,whk);% 输出lhk的角速度图%title('lhk的角速度图');xlabel('θ(rad)');ylabel('whk(rad/s)');vxH=vxE-leh*weh.*sin(feh); %运动副H速度%vyH=vyE+leh*weh.*cos(feh);G222=axK-axE+weh.^2.*C222-whk.^2.*C333;G333=ayK-ayE+weh.^2.*S222-whk.^2.*S333;eeh=(G222.*C333+G333.*S333)./G111; %杆EH角加速度%ehk=(G222.*C222+G333.*S222)./G111; %杆FK角加速度%subplot(3,3,7);plot(f1,ehk);%输出lhk的角加速度%title('lhk点角加速度图 ');xlabel('f1(rad)');ylabel('ehk(rad/s2)');五、计算结果。