二自由度搬运机器人指标
工业机器人的基本参数和性能指标

工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
工业机器人的基本参数和性能指标知识讲解

工业机器人的基本参数和性能指标工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
毕业设计-二自由度机器人的结构设计与仿真

二自由度机器人的结构设计与仿真学院:专业:姓名:指导老师:机械与车辆学院机械电子工程学号:职称:教授中国·XX二○一二年五月毕业设计诚信承诺书本人郑重承诺:本人承诺呈交的毕业设计《二自由度机器人的结构设计与仿真》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,设计使用的数据真实可靠。
本人签名:日期:年月日二自由度机器人的结构设计与仿真摘要并联机器人有着串联机器人所不具有的优点,在应用上与串联机器人形成互补关系。
二自由度并联机器人是并联机器人家族中的重要组成部分,由于结构简单、控制方便和造价低等特点,有着重要的应用前景和开发价值。
本论文研究了一种新型二自由度平移运动并联机构,该并联机构采用类五杆机构,平行四边形刚架结构来实现,可有效地消除铰链间隙,提高动平台的工作性能,同时有抵抗切削颠覆力矩的能力。
根据该二自由度平面机构的工作空间,利用平面几何的方法求得连杆的长度,并通过Pro/E软件进行仿真检验,并通过软件仿真的方式,优化连杆长度,排除奇异点,同时合理设计机械结构的尺寸,完成结构设计。
对该二自由度并联机器人,以Pro/E为平台,建立两自由度平移运动并联机器人运动仿真模型,验证了机构的实际工作空间和运动情况。
最后指出了本机构的在实际中的应用。
并使用AutoCAD软件进行了重要装置和关键零件的工程图绘制工作,利用ANSYS 软件分析了核心零件的力学性能。
研究结果表明,本文所设计的二自由度机器人性能良好、工作灵活,很好地满足了设计指标要求,并已具备了一定的实用性。
关键词:二自由度;并联机器人;仿真;结构设计;Pro/E2-DOF robot structure design and simulationAbstractParallel robot has a series of advantages of the robot does not have to form a complementary relationship between the application and the series robot. The 2-DOF parallel robot is an important part of the family of parallel robots. The structure is simple, convenient and cost control and low, with significant potential applications and the development value. In this thesis, a new 2- DOF translational motion parallel mechanism, the analogous mechanism for class five institutions, parallelogram frame structure, which can effectively eliminate the hinge gap and improve the performance of the moving platform, while resistance to cutting subvert the torque capacity.The working space of the 2-DOF planar mechanism, the use of plane geometry to obtain the length of the connecting rod, and the Pro/E software simulation test, and software simulation to optimize the connecting rod length, excluding the singular point, while the size of the rational design of mechanical structure, complete the structural design. And important equipment and key parts of the engineering drawings using AutoCAD software, using ANSYS software to analyze the mechanical properties of the core parts.The 2-DOF parallel robot to the Pro/E platform, the establishment of the 2-DOF of translational motion parallel robot simulation model to verify the organization's actual work space and movement. Finally, this institution in the practical application. The results show that the combination of good motor performance of the 2-DOF parallel robot,good to meet the index requirements, and already have a certain amount of practicality.Keywords: 2-DOF; parallel robot; simulation; structural design; Pro/E目录1前言 (1)1.1本课题的研究背景及意义 (1)1.1.1什么是机器人 (1)1.1.2机器人技术的研究意义 (1)1.2机器人的历史与发展现状 (2)1.2.1机器人的发展历程 (2)1.2.2机器人的主要研究工作 (3)1.2.3少自由度机器人的发展历程 (4)1.3本课题的研究内容 (5)2二自由度机器人系统方案设计 (7)2.1二自由度并联机器人机构简介 (7)2.2执行机构方案设计及分析 (7)3二自由度机器人的结构设计与运动分析 (8)3.1已知设计条件及参数 (8)3.1.1连杆机构自由度计算 (8)3.1.2五杆所能达到的位置计算 (8)3.2对机构主体部分的运动学逆解分析 (10)3.2.1位置分析 (10)3.2.2速度与加速的分析 (11)3.3受力分析 (12)4基于Pro/E软件环境下二自由度机器人的结构设计 (16)4.1 Pro/E软件简介 (16)4.2驱动元器件的选择 (17)4.2.1步进电机的选择 (17)4.2.2联轴器选择 (18)4.3平面连杆机构的结构参数确定 (19)4.4输入轴的设计 (20)4.5安装支架的参数确定 (21)5基于Pro/E软件环境下的机器人装配及动态仿真 (23)5.1虚拟装配过程 (23)5.1.1连杆机构的装配 (23)5.1.2安装支架的装配 (24)5.1.3完成二自由度机器人的最终装配 (24)5.2基于Pro/E软件环境下的动态仿真 (25)6基于AutoCAD软件环境下的机械结构设计 (31)6.1AutoCAD软件简介 (31)6.2平面连杆机构的结构设计 (32)6.3机架的结构部件图绘制 (33)6.4二自由度机器人工程图绘制 (34)7基于Ansys软件环境下的有限元分析 (36)7.1Ansys软件简介 (36)7.2对输入轴的有限元分析 (37)7.3对输入连杆的有限元分析 (37)8 总结与展望 (40)8.1课题研究工作总结 (40)8.2研究展望 (41)参考文献 (42)致谢 (44)附录(一) (45)附录(二) (52)1前言机器人技术是一门光机电高度综合、交叉的学科,它涉及机械、电气、力学、控制、通信等诸多方面。
工业机器人的技术指标和应用
工业机器人的技术指标和应用工业机器人是一种能够自动执行各种任务的机器人系统,它主要应用于生产线上的各个环节。
工业机器人的技术指标和应用十分丰富多样,下面将对其进行详细介绍。
一、技术指标1. 负载能力:工业机器人的负载能力是指机器人能够承受的最大重量。
根据不同的应用需求,工业机器人的负载能力有所不同,一般可分为轻型、中型和重型三个等级。
2. 动作自由度:工业机器人的动作自由度是指机器人能够自由运动的维度数量。
通常情况下,工业机器人的动作自由度为6个,即可在三维空间内进行平移和旋转运动。
3. 重复定位精度:工业机器人的重复定位精度是指机器人在重复执行同一任务时,所能达到的精确度。
该指标对于生产线上的装配任务尤为重要,一般要求在毫米级别的精度范围内。
4. 控制系统:工业机器人的控制系统是指机器人的核心控制单元,用于控制机器人的运动和执行任务。
常见的控制系统有基于PC的控制系统和专用控制器,它们具有高度的实时性和可编程性。
5. 传感器技术:工业机器人常配备各种传感器,用于感知环境和与外部物体进行交互。
常见的传感器包括视觉传感器、力传感器、激光传感器等,它们能够使机器人更加智能化和灵活。
6. 安全技术:工业机器人的安全技术是保障生产线安全的重要手段。
包括紧急停止装置、防撞装置、安全光幕等,能够保护操作人员和机器人在工作过程中的安全。
二、应用领域1. 组装与装配:工业机器人在组装与装配领域有着广泛的应用。
通过精确的位置控制和高度灵活的操作能力,机器人可以完成各种零部件的组装和装配工作,提高生产效率和质量。
2. 上下料:工业机器人在上下料领域也有着重要的应用。
机器人可以通过视觉传感器和力传感器等技术,实现对物料的精确定位和抓取,实现自动化的上下料操作,提高生产线的效率和稳定性。
3. 焊接与切割:工业机器人在焊接与切割领域能够发挥独特的优势。
机器人具备高度的精确度和稳定性,可以实现复杂曲线的焊接和切割操作,提高生产线的自动化水平和生产质量。
机器人性能指标

机器人性能指标机器人性能指标机器人技术的不断进步和应用范围的扩大,使得人们对机器人性能指标的要求也越来越高。
机器人性能指标是衡量机器人性能的重要标准,它涵盖了多个方面的指标,包括机械性能、智能性能、运动性能等。
本文将从不同角度讨论机器人性能指标,并探讨其在实际应用中的重要性。
一、机械性能指标机械性能是机器人最基本的性能之一,它直接关系到机器人的运动能力和作业能力。
机械性能指标包括运动自由度、精度、速度和负载能力等。
1. 运动自由度:机器人的运动自由度是指机器人能够独立运动的自由度数量。
运动自由度越高,机器人的灵活性和适应性就越强。
2. 精度:机器人的精度是指机器人在执行任务时的定位和定向的准确度。
精度越高,机器人的作业效果就越好。
3. 速度:机器人的速度是指机器人在执行任务时的移动速度。
速度越快,机器人的响应能力和工作效率就越高。
4. 负载能力:机器人的负载能力是指机器人能够携带和处理的物体的重量。
负载能力越大,机器人的作业范围就越广。
二、智能性能指标随着人工智能技术的发展,机器人智能性能成为了关注的焦点。
智能性能指标是评价机器人智能水平的重要标准,它涵盖了感知、认知、决策和学习等方面的指标。
1. 感知:机器人的感知能力是指机器人能够感知环境和人类的能力。
感知能力包括视觉、听觉、触觉等多个方面,它直接影响到机器人对环境的理解和反应。
2. 认知:机器人的认知能力是指机器人能够理解和分析感知到的信息的能力。
认知能力包括语言理解、图像识别、物体识别等,它使得机器人能够更好地与人类进行交互和沟通。
3. 决策:机器人的决策能力是指机器人能够根据感知和认知结果做出合理决策的能力。
决策能力决定了机器人在复杂环境下的应对能力和自主性。
4. 学习:机器人的学习能力是指机器人能够从经验中学习和改进自身性能的能力。
学习能力使得机器人能够不断优化自身的行为和表现。
三、运动性能指标机器人的运动性能是指机器人在运动过程中的稳定性、平滑性和协调性等指标。
二自由度平面机器人的运动学方程

在研究二自由度平面机器人的运动学方程之前,首先我们需要了解什么是二自由度平面机器人。
二自由度平面机器人是指可以在平面上进行两个独立自由度运动的机器人,通常包括平移和旋转两种运动方式。
在工业自动化、医疗器械、航空航天等领域,二自由度平面机器人都有着重要的应用价值。
1. 二自由度平面机器人的结构和运动二自由度平面机器人通常由两个旋转关节和一个末端执行器组成。
这种结构可以让机器人在平面上实现灵活的运动,同时保持结构相对简单。
机器人可以通过控制两个旋转关节的角度来实现平面内的任意位置和姿态的变化,具有较高的灵活性和自由度。
2. 二自由度平面机器人的运动学方程接下来我们将重点讨论二自由度平面机器人的运动学方程。
运动学方程是描述机器人末端执行器位置和姿态随时间变化的数学模型,对于控制机器人的运动具有重要意义。
对于二自由度平面机器人来说,其运动学方程可以通过几何方法和代数方法来推导。
在几何方法中,我们可以利用几何关系和三角学知识来描述机器人末端执行器的位置和姿态。
而在代数方法中,我们可以通过矩阵变换和雅可比矩阵等工具来建立机器人的运动学方程。
3. 个人观点和理解在我看来,二自由度平面机器人的运动学方程是机器人控制和路径规划中的关键问题之一。
通过深入研究并掌握二自由度平面机器人的运动学方程,我们可以更好地设计控制算法、规划运动轨迹,实现机器人的精确操作和灵巧动作。
运动学方程的研究也为机器人的动力学分析和仿真建模提供了重要的基础。
总结回顾:通过本文的讨论,我们深入探讨了二自由度平面机器人的结构和运动特性,重点讨论了其运动学方程的推导方法和意义。
通过对运动学方程的研究,我们可以更好地理解机器人的运动规律和特性,为机器人的控制和路径规划提供重要的理论支持。
在文章中多次提及 "二自由度平面机器人的运动学方程",突出主题。
文章总字数大于3000字,能够充分深入地探讨主题,满足了深度和广度的要求。
并且在总结回顾中共享了自己的观点和理解,使得整篇文章更加有说服力和可信度。
工业机器人技术参数介绍
机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人必须考虑的问题。
机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等。
1、自由度.是指机器人具有的独立运动的坐标轴数量。
.机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动参数的数量。
机器人的自由度数一般等于关节数量。
.常见机器人自由度数一般有5~6个。
有些机器人还附带有外部轴。
2、关节(Joint)即运动副,允许机器人手臂各零件之间发生相对运动的机构。
3、工作范围工业机器人手臂或手部安装点所能达到的所有空间范围。
其形状取决于机器人的自由度数和各运动关节的类型与配置。
机器人的工作范围一般有:图解法和解析法这两种方法表示。
4、速度机器人在工作过程中带载荷条件下、匀速运动过程时,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。
5、工作负载是指机器人手腕前端安装负荷在工作范围内任何位置上所能承受的最大重量,一般用质量、力矩、惯性矩表示。
还和运行速度和加速度大小等参数有关,工作负载一般用高速运行时机器人所能抓取的工件重量作为负载承受能力为指标。
搬运机器人的负荷重量,必须考虑抓手和工件的合计。
6、分辨率是指机器人能够实现的最小移动距离或最小转动角度。
7、精度重复性或重复定位精度:指机器人重复到达某一目标位置的差异性。
比如你要求一个轴走100 mm 结果第一次实际上他走了100.01 重复一次同样的动作他走了99.99 这之间的误差0.02 就是重复定位精度。
它是衡量一列误差值的集中程度,即重复度。
机器人精度机不单取决与关节减速机及传动装置,且对机械装配工艺存在很大关系,很多由于装配不到位导致机器人重复定位精度下降。
搬运机械臂参数
搬运机械臂参数
搬运机械臂是一种机器人,能够自主完成物料搬运任务。
其参数主要包括以下几个方面:
一、自由度
搬运机械臂的自由度是指其可运动的自由度,一般分为3轴、4轴、5轴、6轴等不同的自由度。
自由度越高,搬运机械臂的灵活性和可操作性越强。
二、最大负载
搬运机械臂的最大负载是指其最大承载能力,通常用千克(kg)或吨(t)来表示。
不同型号的搬运机械臂最大负载不同,一般在100kg-1000kg之间。
三、最大作业范围
搬运机械臂的最大作业范围是指其能够搬运物料的最大距离,一般用米(m)来表示。
不同型号的搬运机械臂最大作业范围不同,一般在2m-10m之间。
四、控制方式
搬运机械臂的控制方式分为手动控制和自动控制两种。
手动控制需要由人员操作,自动控制则可通过计算机程序实现。
五、运动速度
搬运机械臂的运动速度是指其在空间中的移动速度,一般用米每秒(m/s)来表示。
不同型号的搬运机械臂运动速度不同,一般在0.1m/s-1m/s之间。
综上所述,以上五个参数是搬运机械臂的重要参数,用户在购买时可根据实际需求选择合适的型号。
双重自由度机器人的机械结构设计

双重自由度机器人的机械结构设计首先,机器人的工作空间是设计时需要考虑的重要因素之一、工作空间决定了机器人可以执行的任务范围。
为了实现更大的工作空间,可以考虑采用平行机构或串联机构。
平行机构可以提供更大的工作空间,但其运动灵活性较差;串联机构则可以提供更好的运动灵活性,但工作空间较小。
因此,在设计双重自由度机器人时,需要综合考虑工作空间和运动灵活性的要求。
其次,机械稳定性也是设计双重自由度机器人时需要考虑的重要因素之一、机器人必须能够稳定地支持和移动负载,否则可能导致机器人在操作过程中失去平衡。
为了提高机械稳定性,可以考虑采用更加坚固和刚性的材料,如铝合金、钢等,以及增加机器人的支撑点。
此外,运动灵活性是双重自由度机器人设计的重要考虑因素之一、运动灵活性可以实现机器人在不同方向上的自由运动,使其能够适应不同的工作环境和任务要求。
为了提高运动灵活性,可以采用柔性链设计或并联机构设计。
柔性链设计可以提供更大的运动范围和自由度,但其精度较低;并联机构设计则可以提供更好的精度和精确度。
根据具体的任务需求,可以选择合适的设计方案。
另外,精度要求也是双重自由度机器人设计时需要考虑的因素之一、精度要求可以根据具体的应用领域和任务要求进行调整。
例如,一些精密操作,如微操作或装配操作,可能需要更高的精度要求;而其他一些任务,如搬运物品或简单组装,可能对精度要求较低。
为了提高精度,可以采用高精度传感器和控制算法来实现。
在进行双重自由度机器人的机械结构设计时,还需要考虑其他因素,如机器人的体积和重量、动力传输和控制等。
根据具体的应用需求和技术可行性,可以选择合适的设计方案。
综上所述,双重自由度机器人的机械结构设计需要考虑多个因素,以实现机器人的工作空间、机械稳定性、运动灵活性和精度要求的平衡。
搬运机器人关节自由度计算

搬运机器人关节自由度计算首先,我们需要了解什么是关节自由度。
关节自由度是机器人关节能够独立运动的能力,通常用一个参数表示,即关节数。
对于搬运机器人来说,关节自由度越大,机器人的灵活性越高,能够完成更多种类的搬运任务。
对于一个搬运机器人来说,通常由多个关节构成,每个关节都具有一定的自由度。
因此,要计算搬运机器人的关节自由度,首先需要确定机器人各个关节的自由度。
一般来说,机器人的关节自由度可以通过机器人的运动链分析来确定。
运动链是指机器人从基座到末端执行器的连接方式。
在搬运机器人中,通常采用串联型的运动链,也就是依次连接多个关节。
现在,我们以一个三自由度的搬运机器人为例进行关节自由度的计算。
首先,我们需要确定机器人各个关节的运动范围。
关节的运动范围通常通过机械结构设计和电机控制来确定。
在搬运机器人中,常见的关节运动方式有旋转和直线运动。
对于旋转关节,可以通过角度范围来确定其运动自由度;对于直线关节,可以通过长度范围来确定其运动自由度。
假设我们的搬运机器人有三个关节,分别是旋转关节A、旋转关节B和直线关节C。
通过机械设计和电机控制,我们确定了关节A的旋转范围为0到90度,关节B的旋转范围为0到180度,关节C的长度范围为0到1米。
接下来,我们根据关节运动范围来确定每个关节的自由度。
对于旋转关节来说,由于其运动方式为旋转,其自由度为1;对于直线关节来说,由于其运动方式为直线运动,其自由度也为1因此,我们可以确定搬运机器人的关节自由度为3、即搬运机器人具有三个关节,每个关节都具有一个自由度。
需要注意的是,以上仅为一个简单的搬运机器人的关节自由度计算,实际的搬运机器人可能具有更多的关节,并且关节的运动方式也可能更加复杂。
在实际应用中,我们需要根据机器人的具体设计和要求来确定关节自由度。
总结起来,搬运机器人的关节自由度是机器人关节能够独立运动的能力,通过分析机器人的运动链和关节运动范围,可以确定机器人的关节自由度。
基于活动标架法的二自由度机器人操作性能分析

基 于 活 动 标 架 法 的 二 自 由度 机 器 人 操 作 性 能 分 析
张 莲东 ( 大连 理 工大学 机械 工程 学 院 , 大连 162 ) 108
一
摘 要: 甩活动标 采法研 究 了二 自由度机 嚣人机构 的运动学 , 出 了机 嚣人机构的一些 不变量 , 得 并椎据 它们定 义 了机器人的平移体积、 旋转体积、 可操作性指标和灵活度 , 用这些指标评价机 嚣人 的操作性 能。并由此得 出 了机 器人产生奇异的条件 , 究 了工作空闻曲面和奇 异曲面的几何性质 , 算 了它们 的法曲率和尚斯 曲率。 研 计 关键词 : 操作性能 : 活动标架法 : 不变量 中图分类号 : p 4Th 1 T 2 ; l2 文献标识码 : A 机器人的操作 性能是机 器人 的重要指标 之一。对 于运 动学操作性 能的研 究 , 主要 包括两个基本 方 面 : 到达某 一 ① 确定位置或 一系列 位置的能力 ; ②在 某一给定 位形处 , 改变 位置或姿态 的能力 。操作性能与机器人的工作空间 , 灵活度 有关 。研究 方法主要 有基 于 D H参数 的矩 阵变 换法 , 于 - 基 运动螺旋 坐标 的旋 量法 其核心都是运动学正解映射 的 J- a
维普资讯
第 培 卷第 2 期 20 0 2年 4月
机械设计与研究
Ma hn c ieDein a dRee rh sg n sac 20
文章编号 :062 4 ( 02 0 —0 50 10 —3 3 2 0 )20 2 —3
效果 。现代 微分几何 是在黎 曼空间 内研究 微分 流形 的几
【 :∑ ^ 州
有 了活 动标架 的相对分量 和结构方程 . 曲面上的几何 不变量 就可以借助 于一 阶标架场 的相对分量来表示 , 但不受不 同活 动标架选 择的影响。
运输机器人基本参数

运输机器人基本参数运输机器人是一种能够自主运行、搬运物品的机器人,通常用于仓库、工厂等场所的物流运输工作。
为了更好地了解运输机器人的基本参数,以下是一些常见的参数及其重要性:1. 载重能力:运输机器人的载重能力是指其能够搬运的最大重量。
这个参数决定了机器人能够搬运的货物种类和数量,对于提高物流效率和降低人力成本非常重要。
2. 速度:运输机器人的速度是指其移动的最大速度。
速度的快慢直接影响了机器人在工作场所的运输效率,快速的运输机器人能够更快地完成任务,提高物流效率。
3. 尺寸:运输机器人的尺寸包括长度、宽度和高度等参数,尺寸的大小决定了机器人能够穿越的空间和搬运的货物的大小。
合适的尺寸能够使机器人更容易在工作场所中自由移动。
4. 导航方式:运输机器人的导航方式包括激光雷达、红外线、视觉等多种方式,不同的导航方式适用于不同的工作场所和环境。
准确的导航方式能够使机器人更加精准地完成运输任务。
5. 动力来源:运输机器人的动力来源通常包括电池、电源线等,不同的动力来源会影响机器人的工作时间和充电方式。
稳定的动力来源是保证机器人持续运输的重要条件。
6. 工作时间:运输机器人的工作时间是指其能够持续工作的时间,长的工作时间能够提高机器人的运输效率,减少人力成本。
7. 安全性:运输机器人的安全性是指其在工作过程中对人员和设备的安全保护能力。
高安全性的运输机器人能够减少工作场所的安全事故,保护人员的生命财产安全。
综上所述,运输机器人的基本参数包括载重能力、速度、尺寸、导航方式、动力来源、工作时间和安全性等多个方面。
了解和合理选择这些参数对于提高运输机器人的工作效率、降低成本、保障安全都至关重要。
希望以上内容能够帮助您更全面地了解运输机器人的基本参数。
二自由度平移并联机器人空间静刚度分析

S a i lS a i t n s a y i f2 DOF a sa i n lPa al lRo o s p ta t tc S i e s An l ss o - f Tr n l to a r l b t e
P ENG n b n, n - n W U i S Bi — i LIZe g mi g, Ka , UN Yu
二 自 由度 平 移 并 联 机 器 人 空 间 静 刚 度 分 析
彭斌彬 , 李增 明, 武 凯, 孙 宇
( 南京理工大学 机械工程学院 , 江苏 南京 2 0 9 ) 10 4
摘 要 : 为提 高一种二 自由度平移 并联机 器人机 构静 刚度 分析 的准确度 , 文建立 了六维 空间静 该 刚度模型 , 并对主 刚度及 主方 向做 出评 价。考虑 机构 的驱 动刚度 、 结构 刚度 和空 间外载荷 3个 因 素对整机静 刚度 产生的影响 , 对机 构 的支链和 滚珠 丝杠进 行静 力 学分析 , 出它们 的 变形。采 用 求
位移 刚度 的特性 。研 究结果表 明该二 自由度平 面平移 并联机 器人机构 的静 刚度是 空间 六维的 , 沿
导轨轴线 方向的静 刚度具有各 向 同性 , 垂直于导轨轴线 方向的静 刚度与其位 置有关。
关键 词 : 并联 机 器人 ; 刚度 ; 静 虚拟机 构 法 ; 叠加 原理 ; 交 变换 法 正 中 图分 类号 :P 4 T 2 文章编 号 :0 5 9 3 ( 0 2 0 — 5 2 0 10 — 8 0 2 1 ) 3 0 2 — 7
Hale Waihona Puke 虚拟机构 法并根 据输入 输 出之 间的速 度 映射 关 系分 别得 到 支链和 滚珠 丝杠 引起动 平 台产 生的位
搬运机器人设计说明书
1 绪论1.1研究背景与意义工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。
机械手涉及到力学、机械学、电器液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
工业机械手是近几十年发展起来的一种高科技自动生产设备。
工业机械手也是工业机器人的一个重要分支。
他的特点是可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性。
机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间[1-3]。
机械手的发展是由于它的积极作用正日益为人们所认识:其一、它能部分的代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;其三、它能操作必要的机具进行焊接和装配,从而大大的改善了工人的劳动条件,显著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。
因而,受到很多国家的重视,投入大量的人力物力来研究和应用。
尤其是在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。
在我国近几年也有较快的发展,并且取得一定的效果,受到机械工业的重视。
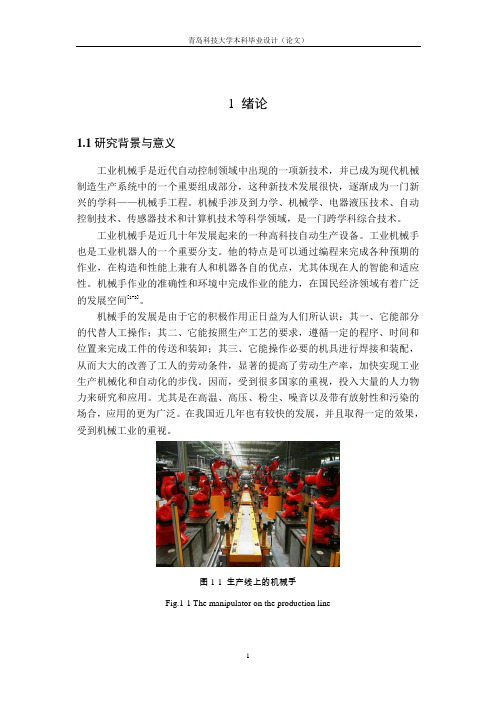
图1-1 生产线上的机械手Fig.1-1 The manipulator on the production line进入21世纪,随着我国人口老龄化的提前到来,近来在东南沿海还出现大量的缺工现象,迫切要求我们提高劳动生产率,提高我国工业自动化水平势在必行。
工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用,因而具有强大的生命力受到人们的广泛重视和欢迎。
实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业机机器人的基本参数性能指标有哪几点?

工业机机器人的基本参数性能指标有哪几点?工业机器人是模仿人手动作,按照一定程序实现自动搬运、装卸和操作的自动化装置。
一般来说,机械手由执行器、驱动机构、控制系统、检测装置等组成。
智能机械手也有传感系统和智能系统。
工业机器人基本参数:(1)抓取重量(也叫臂力):额定抓取重量或额定载荷,单位为N(必要时可以输入限定运动速度下的抓取重量)。
(2)自由度和坐标形式:身体、手臂和手腕的运动有几个自由度。
解释坐标形式。
(3)定位方式:固定式机械停止、可调式机械停止、行程开关、电位器等位置确定和检测装置;由每个自由度确定的位置数量或位置信息容量;点控制或连续轨迹控制。
(4)驱动方式:气动、液压、电动或机械传动。
(5)手臂运动参数:伸展、抬起、侧移、旋转、俯仰的位移范围和速度。
(6)腕关节运动参数:旋转的位移幅度和速度、上下摆动、左右摆动和横向运动。
(7)手指跨度范围(nlm)和握力(即夹紧力或吸力)(n)。
(8)定位精度:定位精度和重复精度(mm)。
(9)编程方式和程序容量:如插板、二极管矩阵插件、一位微机可编程过程控制、多位微机控制、学习存储等。
(10)收发信件若干次,联锁控制信号若干天。
(11)控制系统的动力:电和气。
(12)驱动源:气动压力;油压、油泵规格、发动机功率;电机的型号和规格。
(13)外形尺寸:长(毫米)宽(毫米)高(毫米)。
(14)重量:整机重量(kg)。
工业机器人是工业上应用广泛的机械手。
工业机器人具有一定的自动化程度,利用电控系统控制来实现各种工业加工制造功能。
工业机器人广泛应用于电子、物流、化工等各个工业领域。
一般来说,一个工业机器人由三个主要部分和六个子系统组成;三个主要部分是机械部分、敏感部分和控制部分;六个子系统可分为机械结构系统、驱动系统、感知系统和机器人与环境交互系统、人机交互系统和控制系统等。
特别声明:文章仅代表个人观点,不代表丽泰的观点和立场。
如果侵犯到您的权益,版权或其他问题请及时联系我们,我们会时间处理。
搬运机器人关节自由度计算

搬运机器人关节自由度计算关节自由度是指机器人的各关节能够运动的自由度数量,即机器人能够在各个关节上进行的独立运动的个数。
搬运机器人通常由多个关节组成,每个关节都可以进行旋转或者伸缩运动,因此搬运机器人的自由度计算主要涉及各个关节的运动情况。
一个简单的搬运机器人,比如常见的2自由度机器人,通常由两个关节组成,分别为基座关节和臂关节。
基座关节和臂关节的运动方式可以是旋转运动或者伸缩运动。
以旋转运动为例,基座关节可以在水平面上进行360度的旋转,因此其自由度为1;臂关节可以进行上下运动,并且在其运动的范围内可以选择任意一个角度,因此其自由度为1、因此,2自由度机器人的自由度为1+1=2而对于伸缩运动,机器人的自由度计算稍有不同。
伸缩运动的自由度是通过机器人关节的长度范围计算得出的。
比如,对于一个机器人关节的长度范围为[a,b],那么机器人在该关节上的自由度为b-a+1在实际应用中,搬运机器人往往需要具备更高的自由度,以便能够完成更加复杂的运动任务。
为了提高机器人的自由度,可以增加机器人关节数量或者增加关节可运动的方向。
例如,一个3自由度的机器人可以由一个基座关节和两个臂关节组成,每个关节上的运动方式可以是旋转或者伸缩。
在进行搬运机器人的关节自由度计算时,还需要考虑机器人的可达性。
可达性是指机器人在空间中能够到达的位置或者末端执行器的位置范围。
在搬运机器人的设计中,需要保证机器人的可达性能够覆盖所需搬运的物品的位置范围,否则机器人无法完成任务。
值得注意的是,机器人的关节自由度数量并不是越多越好。
关节自由度的增加可能会增加机器人的复杂性和系统成本。
因此,在进行搬运机器人的关节自由度计算时,需要根据实际需求和可行性进行合理设计。
总结起来,搬运机器人的关节自由度计算是确保机器人能够在空间中灵活自如地完成各种复杂动作的基础。
通过对各个关节运动方式和长度范围进行计算,可以确定机器人的自由度数量。
在设计搬运机器人时,需要综合考虑关节自由度、可达性和实际需求,以达到设计的目标。
二自由度机器人的通用控制
二自由度机器人的通用控制机器人是一中自动化的机器,所不同的是这种机器具备一些与人或生物相似的智力能力,如感知能力,规划能力,动作能力和协同能力,是一中具有高度灵敏的自动化机器。
作为一个复杂的综合系统,机器人控制系统涉及到很多的学科(如计算机,机械,传感器,人工智能等)。
其中,机器人的控制系统具有很重要的意义。
随着机器人的功能日益复杂,如何综合考虑模块功能,控制性能要求,设计一个合乎要求的机器人控制系统,将是一项非常有意义的事情。
那么研究一个机器人控制系统,需要我们对机器人控制系统有一个明确的认识。
机器人控制体系是指控制机器人的软件和硬件机构,其研究主要集中在机器人控制器的研究和开发上,通常分为功能设计和结构设计。
功能设计部分要完成控制功能和算法的定义,结构设计是完成功能在软件和硬件上的分布。
本文概要本文主要着眼于机器人的控制系统的设计。
以二连杆机器人的控制系统为例提出二自由度机器人的控制设计方案:基于PID 控制器的二自由度机器人的MATLAE仿真。
第一章:机器人的基础知识什么是机器人?如果将常规的机器人操作手与挂在多用车或着牵引车上的起重机进行比较,可发现两者非常相似。
他们都具有许多的连杆,这些关节同过连杆依次连接,这些关节有驱动器驱动。
在上述两个系统中,操作手都能在空中运动并且还可以运动到空间的任何位置,他们都能承担一定的负荷,并都用一个中央控制器驱动器。
然而,他们一个称为机器人一个称为起重机,两者最根本的不同就是起重机是有人工操作的,而机器人是由计算机编程控制的,正是通过这个可以区别一台设备到底是简单的操作机还是机器人。
通常机器人设计成由计算机或着类似的装置来控制,机器人的动作受计算机监控的控制器多控制,该控制器本身也会运行某中类型的程序。
因此,如果程序变了,机器人的动作相应的就会改变。
我们希望一台设备能灵活地完成各种不同的工作而无需要重新设计硬件装置。
为此机器人必须设计成可重复编程,通过改变程序来执行不同的任务(当然在限制的范围内)。
scara机器人 技术参数
scara机器人技术参数
SCARA机器人是一种具有两个互相垂直的连杆的机器人,常用于装配、搬运、检测等工业自动化领域。
以下是SCARA机器人的技术参数:
1. 负载:SCARA机器人的负载通常在1-10千克之间,具体取决于机器人
的型号和设计。
2. 自由度:SCARA机器人具有两个自由度,分别是水平和垂直方向的旋转。
这两个自由度使得机器人可以在平面内精确地定位和定向。
3. 运动范围:SCARA机器人的运动范围取决于其连杆的长度和旋转角度。
一般来说,机器人的最大旋转角度为±180度。
4. 重复定位精度:SCARA机器人的重复定位精度通常在±±毫米之间,这使得机器人能够执行高精度的装配和检测任务。
5. 速度:SCARA机器人的速度取决于其驱动系统和负载。
一般来说,机器
人的最大速度为60个循环/分钟。
6. 控制方式:SCARA机器人可以通过各种方式进行控制,例如通过预编程
的程序、通过示教器或通过网络。
7. 电源:SCARA机器人的电源通常为直流电源,电压范围为24-48伏特。
8. 尺寸:SCARA机器人的尺寸取决于其设计和应用,一般来说,机器人的
长度和宽度分别为毫米和毫米。
以上是SCARA机器人的一些常见技术参数,具体参数可能会因制造商和应用而有所不同。
机器人自由度计算方法
机器人自由度计算方法
机器人自由度是指机器人能够在运动过程中独立自主地移动的自由程度。
在机器人控制方面,自由度是评估机器人性能的重要指标之一。
机器人的自由度通常通过机器人的关节数目来确定。
机器人自由度的计算方法可以通过以下方式进行:
1. 关节自由度:机器人的关节自由度是指机器人能够在运动过程中独立自主地移动的自由程度。
关节自由度的计算方法是通过机器人关节数目来确定。
2. 运动自由度:机器人的运动自由度是指机器人在运动过程中可以独立自主地移动的自由程度。
运动自由度的计算方法是通过机器人的关节数目和机器人的链接数目来确定。
3. 有效自由度:机器人的有效自由度是指机器人可以在运动过程中实际使用的自由程度。
有效自由度的计算方法是通过机器人的运动自由度和机器人的约束条件来确定。
计算机器人自由度的方法对于机器人的设计和控制非常重要。
通过计算机器人自由度,可以确定机器人的运动能力,并为机器人的自主移动提供更好的控制方法。
- 1 -。
机器人参数指标-参数指标

机器人参数指标-参数指标机器人参数指标1.环境条件(1)机器人存储环境温度:-25℃~50℃;环境湿度:不大于90%。
(2)运动平台户外使用环境温度:-15℃~50℃;环境湿度:可在99%湿度条件下正常运行;最大积雪厚度:50mm,无覆冰;最小涉水深度:100mm。
最大降雨等级:中雨2.导航定位(1)机器人采用室外GNSS导航,室内单线激光雷达导航方式,具备三维空间定位能力。
(2)机器人具有按照预先设定任务或路线自动行走和停止的功能。
(3)机器人具备动态巡检任务、路径规划功能。
(4)机器人具备便于使用的导航地图更新功能,当巡检环境发生变化,必要时可对导航地图进行局部调整,避免干扰导航定位。
3.机器人性能要求(1)机器人激光导航重复导航定位执行误差小于±80mm;卫星定位执行误差小于±50mm;机器人移动平台应具备前后直行、转弯、爬坡、越障、制动等基本运动功能,采用四驱驱动;水平地面上的最大遥控速度大于1m/s,最大自动控制行驶速度大于0.8m/s;具备原地转向能力;爬坡能力不小于10°;可在砂石、草地、耕地等非硬化路面行进,在非硬化路面行进时不影响导航定位和拍摄。
(2)安装双目视觉相机,提供WINDOWS下SDK接口,自动获取照片,控制相机调焦,调倍。
(3)机械臂负载大于4KG,自重小于25KG,臂展大于600毫米1.1.二次开发用工控机系统具备较强的图像处理能力,预装操作系统和二次开发用软件,配备必要硬件。
4.果实采摘参数在图像中显示大于30%的红色果实识别率大于80%。
当果实距离摄像机0.3m至1m之间时,果实定位x、y、z三轴误差在15mm以内。
5.培训服务提供必要的开发操作培训。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目名称二自由度搬运机器人结构设计
学生姓名蒋宁学号2011011606
所在系部机电工程系专业机械工程及自动化
第一指导教师王扬威教师号70206037
1.内容及要求:
二自由度搬运机器人具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。
随着自动化数控加工机床的发展,搬运机器人已成为提高劳动生产率的重要装备,二自由度搬运机器人的研制,将为加工中心提供一种快速、高效、运动平稳的上下料装置。
具体研究内容及要求包括:
1. 查找相关文献,分析上下料搬运机器人的研究现状和发展趋势。
2. 设计二自由度搬运机器人的机械结构,对其进行运动分析,并根据设计要求选用元器件和校核结构件强度。
3. 设计机械手的腕部结构,并进行运动分析。
2.主要技术指标:
1. 搬运机器人z轴行程1200mm,y轴行程1500mm。
2. 搬运机器人负载1t。
3. 最大运行速度300mm/s。
3.参考文献:《参考文献规范要求》
1.陶湘厅, 袁锐波, 罗璟. 气动机械手的应用现状及发展前景. 机床与液压[J], 2007, 35(18): 226~228.
2.赵碧, 巴鹏, 徐英凤. 气动上下料机械手手部结构的设计与分析[J]. 沈阳理工大学学报, 2006, 25(6): 58~60.
3.贺东坤, 田明. 气动通用上下料机械手结构设计[J]. 长春大学学报, 2012, 22(10): 1171~1173, 1180.
4.曹海燕, 周一届, 范增良, 欧阳焕. 上下料机械手柔性手腕的设计及位置误差分析[J]. 江南大学学报, 2012,11(1): 56~60.
5.王战中, 张俊, 季红艳, 赵赛, 臧丽超. 自动上下料机械手运动学分析及仿真. 机械设计与制造, 2012,(5):244~24
6.
6.刘金, 周志雄, 黄向明, 周德旺. 一种微细零件上下料机械手的设计与仿真. 计算机仿真, 2010, 27(2): 166~169,179.
4.毕业设计进度、任务安排:
2014.12.30 ~ 2015.02.24 完成文献查找,分析搬运机器人的研究现状和发展趋势;
2015.02.25 ~ 2015.03.30 完成二自由度搬运机器人的机械结构设计;
2015.03.31 ~ 2015.04.20 完成二自由度搬运机器人的运动分析和元器件选型,完成外文资料翻译工作;
2015.04.21 ~ 2015.05.25 完成机械手腕部结构设计,完成相关机械图,完成毕业设计报告,做好毕业答辩准备工作;
2015.05.26 ~ 2015.06.08 论文评审、答辩。